
MCMC Methods for Parameter Estimation in ODE Systems for CAR-T Cell Cancer Therapy


Abstract
Simple Summary
Abstract
1. Introduction

2. Methods
- Distributed functional CAR-T cell ();
- Effector functional CAR-T cell ();
- Memory CAR-T cell ();
- Exhausted CAR-T cell ().
2.1. Math Model Description
- The expansion function describes the growth of effector CAR-T cells, which only happens in the presence of an antigen and is capped by the cells’ inherent growth potential. This is captured in the relation
- The term influences the antigen-dependent growth of CAR-T cells.
2.2. Parameters of the ODE System
2.3. Analyses of the ODEs’ Biological Meaning
- have a built-in death rate, denoted by , reflecting the natural death of these cells over time;
- have a rate at which they successfully take hold, or engraft, symbolized by , which indicates their ability to persist in the patient’s body and begin their therapeutic function.
- cells increase by a factor due to the transition of distributed cells into active, effector cells;
- We previously discussed the term, which modulates the interaction between effector cells and tumor cells;
- cells decrease over time due to a natural dying-off process at a rate represented by , which models the finite lifespan of these cells in the body;
- cells can transform into memory CAR-T cells at a rate of , contributing to the persistence of therapeutic activity even after effector cells decrease;
- cells gradually lose their growth and cancer-fighting abilities, transitioning into exhausted cells at a rate , which reflects the eventual decrease in their functional capacity;
- The population is also reinforced by the transformation into memory CAR-T cells, due to ongoing contact with tumor cells. This is represented by the term , indicating that memory cells can be reactivated under certain conditions;
- Furthermore, tumor cells have various ways to suppress effector CAR-T cells, one of which is described by the term , highlighting the immune-evasive properties of the tumor.
- cells increase by a factor due to the conversion from effector cells, providing a reservoir of cells that can potentially re-engage in fighting cancer;
- The population decreases by a factor , accounting for their transformation back into effector CAR-T cells upon contact with tumor cells, thus maintaining a balance between different CAR-T cell states;
- Finally, cells decrease due to their eventual natural death at a rate .
- cells increase by a factor , as effector cells gradually lose their growth and cancer-fighting abilities, transitioning into a less functional state;
- The natural death of these exhausted cells is accounted for by the term , representing their eventual elimination from the body.
2.4. MCMC Methods
2.4.1. DEMetropolis Algorithm
2.4.2. DEMetropolisZ Algorithm
2.5. PyMC Model
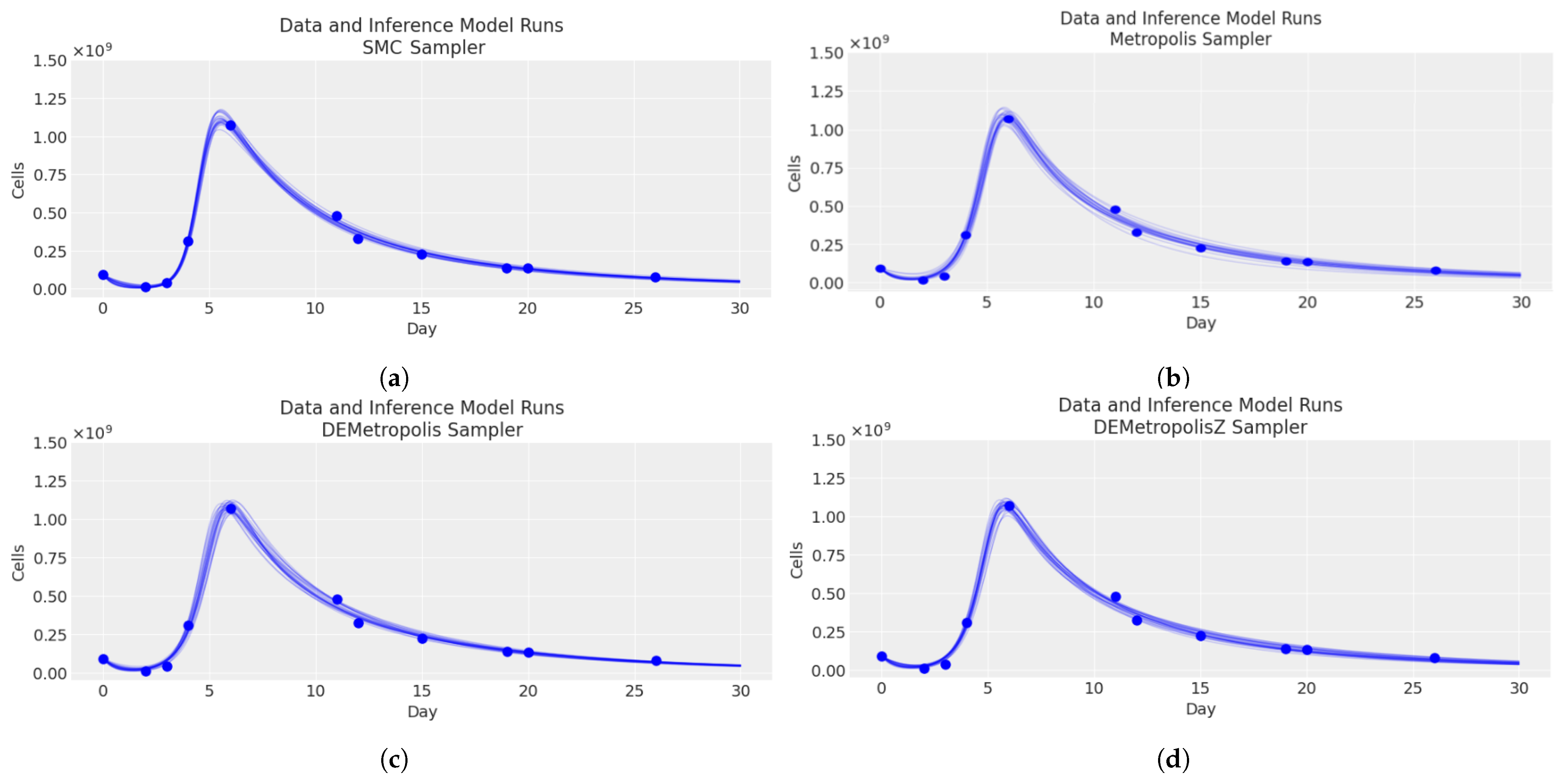
3. Results
- Metropolis—standard Metropolis–Hastings;
- DEMetropolis—a differential evolution Metropolis;
- DEMetropolisZ—a differential evolution Metropolis sampler that uses the past to inform sampling jumps;
- SMC—sequential Monte Carlo.
3.1. Setting for CAR-T Cell Therapy
- Distribution ();
- Effector ();
- Memory ();
- Exhausted ().
3.2. Least Squares Results
- We define the models (2)–(9);
- We used the least_squares function with the bound of having positive parameters, to ensure the existence of the ODEs;
- The procedure returned the values of the best parameters. We could compare these with the parameters chosen in the article, as shown in Table 7.
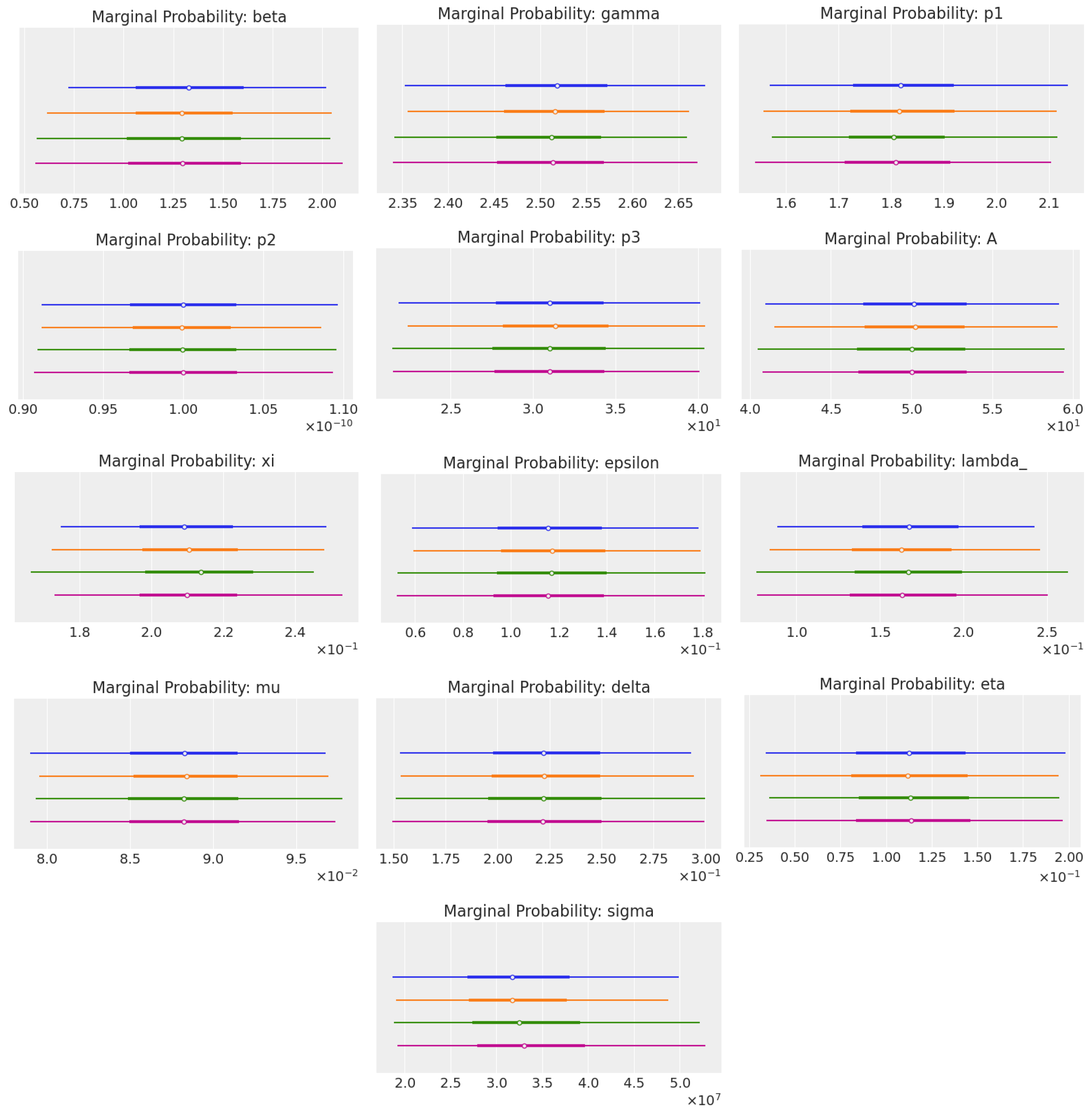
3.3. MCMC Results
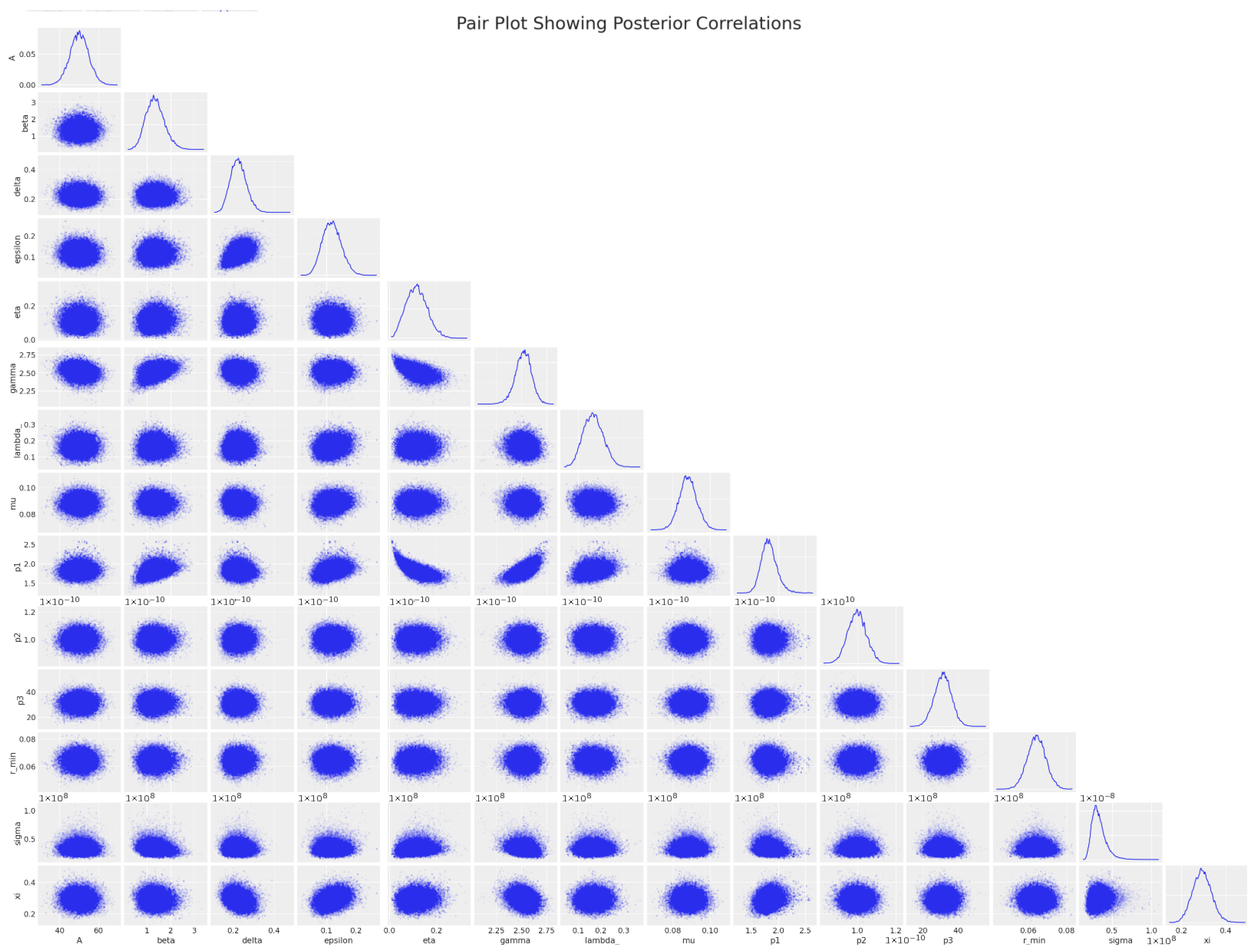
- The histograms (diagonal) exhibit the shapes of the marginal posterior distributions for each parameter. The sharpness of the peaks indicates where the data suggest the most credible values lie;
- The scatter plots (off-diagonal) indicate the degree and pattern of correlation between pairs of parameters. For instance, a circular cloud of points suggests little to no correlation, whereas an elliptical shape oriented along a line indicates a stronger correlation;
- Some parameters appear to have little correlation with others, as indicated by the round shapes of their scatter plots. This suggests that these parameters independently contributed to the model;
- If any of the scatter plots showed a very narrow, elongated ellipse, that would indicate a high degree of correlation, implying that one parameter could be predicted from the other. However, in this plot, while some mild correlations are visible, there does not appear to be an excessively strong linear relationship between any pair of parameters;
- The distribution shapes and scatter plot orientations provide insight into the potential complexity of the statistical model and the interactions between parameters;
- The marginal distributions (diagonal plots) for parameters like and are fairly symmetrical and bell-shaped, which suggests a well-defined mean value and suggests that the DEMetropolisZ algorithm did a good job of exploring the parameter space around the peak probability;
- For parameters like p1, p2, and p3, we see distributions that are slightly skewed, which could indicate that the underlying data have some asymmetries or that these parameters are not normally distributed within the model context. This makes sense, since they are part of the same non-linear function in the ODE system (7):
- Scatter plots for pairs like and show some degree of correlation, as indicated by the elliptical shapes. This is consistent with the model, since these parameters describe the same CAR-T phenotypes, distributed (). Moreover, these correlations do not appear to be very strong, which is good because this means that the parameters are relatively independent of each other, and the model did not suffer from multicollinearity issues;
- Some plots, like those involving , show a tighter clustering of points, suggesting a strong correlation or interdependence between and other parameters such as beta, delta, and epsilon. This might be important for understanding how changes in affect the model or vice versa.
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAR | Chimeric antigen receptor |
| ORR | Overall response rate |
| CR | Complete remission |
| CRS | Cytokine release syndrome |
| TGF | Transforming growth factor |
| ODE | Ordinary differential equation |
| MCMC | Markov chain Monte Carlo |
| SE | Standard error |
| EA | Evolutionary algorithms |
| DE | Differential evolution |
| GPU | Graphics processing unit |
| BMI | Body Mass Index |
References
- Kuwana, Y.; Asakura, Y.; Utsunomiya, N.; Nakanishi, M.; Arata, Y.; Itoh, S.; Nagase, F.; Kurosawa, Y. Expression of chimeric receptor composed of immunoglobulin-derived V resions and T-cell receptor-derived C regions. Biochem. Biophys. Res. Commun. 1987, 149, 960–968. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Wang, Q.; Yang, S.; Kochenderfer, J.; Zheng, Z.; Zhong, X.; Sadelain, M.; Eshhar, Z.; Rosenberg, S.; Morgan, R. A herceptin-based chimeric antigen receptor with modified signaling domains leads to enhanced survival of transduced T lymphocytes and antitumor activity. J. Immunol. 2009, 183, 5563–5574. [Google Scholar] [CrossRef] [PubMed]
- Cappell, K.; Kochenderfer, J. Long-term outcomes following CAR T cell therapy: What we know so far. Nat. Rev. Clin. Oncol. 2023, 20, 359–371. [Google Scholar] [CrossRef] [PubMed]
- Gumber, D.; Wang, L. Improving CAR-T immunotherapy: Overcoming the challenges of T cell exhaustion. eBioMedicine 2022, 77, 103941. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Li, Q.; Zhu, X. Mechanisms of CAR T cell exhaustion and current counteraction strategies. Front. Cell. Dev. Biol. 2022, 10, 1034257. [Google Scholar] [CrossRef]
- Jubel, J.; Barbati, Z.; Burger, C.; Wirtz, D.; Schildberg, F. The Role of PD-1 in Acute and Chronic Infection. Front. Immunol. 2020, 11, 487. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, Q.; Li, D.; Zhang, L.; Gu, Z.; Liu, J.; Liu, G.; Yang, M.; Gu, J.; Cui, X.; et al. PD-1 silencing improves anti-tumor activities of human mesothelin-targeted CAR T cells. Hum. Immunol. 2020, 82, 130–138. [Google Scholar] [CrossRef]
- Chen, X.; Yang, S.; Li, S.; Qu, Y.; Wang, H.; Liu, J.; Dunn, Z.; Cinay, G.; MacMullan, M.; Hu, F.; et al. Secretion of bispecific protein of anti-PD-1 fused with TGF-β trap enhances antitumor efficacy of CAR-T cell therapy. Mol. Ther. Oncolytics 2021, 21, 144–157. [Google Scholar] [CrossRef]
- Kumar, J.; Kumar, R.; Singh, A.K.; Tsakem, E.; Kathania, M.; Riese, M.; Theiss, A.; Davila, M.; Venuprasad, K. Deletion of Cbl-b inhibits CD8(+) T-cell exhaustion and promotes CAR T-cell function. J. Immunother. Cancer 2021, 9, e001688. [Google Scholar] [CrossRef]
- Lynn, R.; Weber, E.; Sotillo, E.; Gennert, D.; Xu, P.; Good, Z.; Anbunathan, H.; Lattin, J.; Jones, R.; Tieu, V.; et al. c-Jun overexpression in CAR T cells induces exhaustion resistance. Nature 2019, 576, 293–300. [Google Scholar] [CrossRef]
- Nixdorf, D.; Sponheimer, M.; Berghammer, D.; Engert, F.; Bader, U.; Philipp, N.; Kazerani, M.; Straub, T.; Rohrbacher, L.; Wange, L.; et al. Adapter CAR T cells to counteract T-cell exhaustion and enable flexible targeting in AML. Leukemia 2023, 37, 1298–1310. [Google Scholar] [CrossRef] [PubMed]
- Chaudhury, A.; Zhu, X.; Chu, L.; Goliaei, A.; June, C.; Kearns, J.; Stein, A. Chimeric Antigen Receptor T Cell Therapies: A Review of Cellular Kinetic-Pharmacodynamic Modeling Approaches. J. Clin. Pharmacol. 2020, 60, S147–S159. [Google Scholar] [CrossRef] [PubMed]
- Singh, A.P.; Zheng, X.; Lin-Schmidt, X.; Chen, W.; Carpenter, T.J.; Zong, A.; Wang, W.; Heald, D.L. Development of a quantitative relationship between CAR-affinity, antigen abundance, tumor cell depletion and CAR-T cell expansion using a multiscale systems PK-PD model. MAbs 2020, 12, 1688616. [Google Scholar] [CrossRef] [PubMed]
- Barros, L.; Paixão, E.; Valli, A.; Naozuka, G.; Fassoni, A.; Almeida, R. CARTmath—A Mathematical Model of CAR-T Immunotherapy in Preclinical Studies of Hematological Cancers. Cancers 2021, 13, 2941. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Ayyar, V.; Zheng, X.; Chen, W.; Zheng, S.; Mody, H.; Wang, W.; Heald, D.; Singh, A.; Cao, Y. Model-Based Cellular Kinetic Analysis of Chimeric Antigen Receptor-T Cells in Humans. Clin. Pharmacol. Ther. 2021, 109, 716–727. [Google Scholar] [CrossRef]
- Brummer, A.; Xella, A.; Woodall, R.; Adhikarla, V.; Cho, H.; Gutova, M.; Brown, C.; Rockne, R. Data driven model discovery and interpretation for CAR T-cell killing using sparse identification and latent variables. Front. Immunol. 2023, 14, 1115536. [Google Scholar] [CrossRef]
- Paixão, E.; Barros, L.; Fassoni, A.; Almeida, R. Modeling Patient-Specific CAR-T Cell Dynamics: Multiphasic Kinetics via Phenotypic Differentiation. Cancers 2022, 14, 5576. [Google Scholar] [CrossRef]
- Douc, R.; Moulines, E.; Priouret, P.; Soulier, P. Markov Chains; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Weinzierl, S. Introduction to Monte Carlo Methods; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Linden, N.J.; Kramer, B.; Rangamani, P. Linden Bayesian parameter estimation for dynamical models in systems biology. PLoS Comput. Biol. 2022, 18, e1010651. [Google Scholar] [CrossRef]
- Fabreti, L.; Höhna, S. Convergence assessment for Bayesian phylogenetic analysis using MCMC simulation. Methods Ecol. Evol. 2022, 13, 77–90. [Google Scholar] [CrossRef]
- Keersmaekers, N.; Ogunjimi, B.; Van Damme, P.; Beutels, P.; Hens, N. An ODE-based mixed modelling approach for B- and T-cell dynamics induced by Varicella-Zoster Virus vaccines in adults shows higher T-cell proliferation with Shingrix than with Varilrix. Vaccine 2019, 37, 2537–2553. [Google Scholar] [CrossRef]
- Dang, T.; Han, J.; Xia, T.; Bondareva, E.; Siegele-Brown, C.; Chauhan, J.; Grammenos, A.; Spathis, D.; Cicuta, P.; Mascolo, C. Conditional Neural ODE Processes for Individual Disease Progression Forecasting: A Case Study on COVID-19. In Proceedings of the 29th ACM SIGKDD Conference On Knowledge Discovery and Data Mining, Long Beach, CA, USA, 6–10 August 2023; pp. 3914–3925. [Google Scholar] [CrossRef]
- Sherri, M.; Boulkaibet, I.; Marwala, T.; Friswell, M. A Differential Evaluation Markov Chain Monte Carlo algorithm for Bayesian Model Updating. arXiv 2017, arXiv:1710.09486. [Google Scholar]
- Ter Braak, C.; Vrugt, J. Differential evolution Markov chain with snooker updater and fewer chains. Stat. Comput. 2008, 18, 435–446. [Google Scholar] [CrossRef]
- Feoktistov, V. Differential Evolution; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Valderrama-Bahamóndez, G.; Fröhlich, H. MCMC Techniques for Parameter Estimation of ODE Based Models in Systems Biology. Front. Appl. Math. Stat. 2019, 5, 55. [Google Scholar] [CrossRef]
- Abril-Pla, O.; Andreani, V.; Carroll, C.; Dong, L.; Fonnesbeck, C.J.; Kochurov, M.; Kumar, R.; Lao, J.; Luhmann, C.C.; Martin, O.A.; et al. PyMC: A Modern and Comprehensive Probabilistic Programming Framework in Python. PeerJ Comput. Sci. 2023, 9, e1516. [Google Scholar] [CrossRef] [PubMed]
- Owens, K.; Bozic, I. Modeling CAR T-Cell Therapy with Patient Preconditioning. Bull. Math. Biol. 2021, 83, 42. [Google Scholar] [CrossRef] [PubMed]
- Gilks, W.; Roberts, G.; George, E. Adaptive Direction Sampling. J. R. Stat. Soc. Ser. D Stat. 2018, 43, 179–189. [Google Scholar] [CrossRef]
- Roberts, G.; Gilks, W. Convergence of adaptive direction sampling. J. Multivar. Anal. 1994, 49, 287–298. [Google Scholar] [CrossRef]
- Haario, H.; Saksman, E.; Tamminen, J. An adaptive Metropolis algorithm. Bernoulli 2001, 7, 223–242. [Google Scholar] [CrossRef]
- Roberts, G.; Rosenthal, J. Coupling and ergodicity of adaptive Markov chain Monte Carlo algorithms. J. Appl. Probab. 2007, 44, 458–475. [Google Scholar] [CrossRef]
- Roberts, G.; Rosenthal, J. Examples of adaptive MCMC. J. Comput. Graph. Stat. 2009, 18, 349–367. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.; Haberl, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0 Contributors SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Faires, J.D.; Burden, R.L. Numerical Methods; Cengage Learning: Belmont, CA, USA, 2003. [Google Scholar]
- Kumar, R.; Carroll, C.; Hartikainen, A.; Martin, O. ArviZ a unified library for exploratory analysis of Bayesian models in Python. J. Open Source Softw. 2019, 4, 1143. [Google Scholar] [CrossRef]
- Lindelöf, E. Sur l’application de la méthode des approximations successives aux équations différentielles ordinaires du premier ordre. Comptes Rendus Hebd. Séances L’Académie Sci. 1894, 116, 454–457. [Google Scholar]
- Hartman, P. Ordinary Differential Equations, 2nd ed.; Society for Industrial: Philadelphia, PA, USA, 1982. [Google Scholar]
- Dekking, F. A Modern Introduction to Probability and Statistics: Understanding Why and How; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Robert, C.; Casella, G. Monte Carlo Statistical Methods; Springer: New York, NY, USA, 2004; ISBN 978-0-387-21239-5/978-1-4419-1939-7/978-1-4757-4145-2. [Google Scholar] [CrossRef]
- Chib, S.; Greenberg, E. Understanding the metropolis-hastings algorithm. Am. Stat. 1995, 49, 327–335. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Camarinha-Matos, L.; Oliveira, L. Distributed Localization with Complemented RSS and AOA Measurements: Theory and Methods. Appl. Sci. 2019, 10, 272. [Google Scholar] [CrossRef]
- Spears, W.; De Jong, K.; Bäck, T.; Fogel, D.; De Garis, H. An overview of evolutionary computation. In European Conference on Machine Learning; Springer: Berlin/Heidelberg, Germany, 1993; pp. 442–459. [Google Scholar]
- Holland, J. Adaptation in Natural and Artificial Systems. An Introductory Analysis with Applications to Biology, Control and Artificial Intelligence; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- De Jong, K. An Analysis of the Behavior of a Class of Genetic Adaptive Systems; University of Michigan: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Goldberg, D.; Holland, J. Genetic Algorithms and Machine Learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Rechenberg, I. Evolutionsstrategie: Optimierung Technischer Systeme nach Prinzipien der Biologischen Evolution; Frommann-Holzboog: Stuttgart, Germany, 1973. [Google Scholar]
- Schwefel, H. Numerical Optimization of Computer Models; Wiley: Hoboken, NJ, USA, 1981. [Google Scholar]
- Fogel, L.; Owens, A.; Walsh, M. Artificial Intelligence through Simulated Evolution; Wiley: Hoboken, NJ, USA, 1966. [Google Scholar]
- Fogel, D. Evolving Artificial Intelligence; University of California at San Diego: San Diego, CA, USA, 1992. [Google Scholar]
- Koza, J. Genetic Programming: On the Programming of Computers by Means of Natural Selection; Bradford: Holland, MI, USA, 1992. [Google Scholar]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Biological Meaning |
|---|---|---|
| (cellday) −1 | Inhibition coefficient of effector CAR-T cells due to interaction with tumor cells. | |
| r | day −1 | Maximum growth rate of tumor cells. |
| b | cell −1 | Inverse of the carrying capacity of tumor cells. |
| - | Half-saturation constant of the cytotoxic effect on tumor cells. | |
| (cellday) −1 | Conversion coefficient of memory CAR-T cells into effector CAR-T cells due to interaction with tumor cells. | |
| a | cell | Half-saturation constant of . |
| Parameter | Unit | Biological Meaning |
|---|---|---|
| day −1 | Reduction rate of infused cells due to natural death during their distribution. | |
| day −1 | Engraftment rate of injected cells to blood and tumor niche. | |
| day −1 | Minimum expansion rate of effector CAR-T cells. | |
| day −1 | Initial expansion rate of effector CAR-T cells. | |
| day −1 | Rate that regulates the duration of maximum expansion period of effector CAR-T cells. | |
| - | Expansion coefficient that regulates decay of maximum expansion period of effector CAR-T cells. | |
| A | cell | Half-saturation constant of . |
| day −1 | Death rate of effector CAR-T cells. | |
| day −1 | Conversion rate of effector CAR-T cells into memory CAR-T cells. | |
| day −1 | Exhaustion rate of effector CAR-T cells. | |
| day −1 | Death rate of memory CAR-T cells. | |
| day −1 | Death rate of exhausted CAR-T cells. | |
| day −1 | Cytotoxic rate of functional CAR-T cells on tumor cells. |
| Algorithm | Advantages | Disadvantages |
|---|---|---|
| Metropolis |
|
|
| DEMetropolis |
|
|
| DEMetropolisZ |
|
|
| SMC |
|
|
| Parameter | Unit | Value | Reference |
|---|---|---|---|
| (cellday) −1 | 5.500 × 10−7 | [17] | |
| r | day −1 | 1.760 × 10−1 | [29] |
| b | cell −1 | 5.000 × 10−13 | [29] |
| - | 3.050 × 10−1 | [29] | |
| (cellday) −1 | 6.000 × 10−6 | [14] | |
| a | cell | 1.000 × 103 | [17] |
| Day | Total CAR-T Cells (C) |
|---|---|
| 0 | 9.230 × 107 |
| 2 | 1.128 × 107 |
| 3 | 4.029 × 107 |
| 4 | 3.106 × 108 |
| 6 | 1.070 × 109 |
| 11 | 4.786 × 108 |
| 12 | 3.259 × 108 |
| 15 | 2.245 × 108 |
| 19 | 1.372 × 108 |
| 20 | 1.340 × 108 |
| 26 | 7.801 × 107 |
| Parameter | Value |
|---|---|
| 1.051 | |
| 5.400 × 10−2 | |
| 1.000 × 10−3 | |
| 1.750 | |
| 7.539 × 10−25 | |
| 3.100 × 101 | |
| A | 5.000 × 101 |
| 2.548 × 10−1 | |
| 6.000 × 10−2 | |
| 1.000 × 10−1 | |
| 9.010 × 10−2 | |
| 1.498 × 10−1 | |
| 2.250 |
| Parameter | Article Value | Least Squares Solution | Difference |
|---|---|---|---|
| 1.051 | 1.412 | 3.611 × 10−1 | |
| 5.400 × 10−2 | 6.432 × 10−3 | 4.757 × 10−2 | |
| 1.000 × 10−3 | 4.127 × 10−1 | 4.117 × 10−1 | |
| 1.750 | 2.116 | 3.657 × 10−1 | |
| 7.539 × 10−25 | 1.000 × 10−10 | 1.000 × 10−10 | |
| 3.100 × 101 | 3.100 × 101 | 0 | |
| A | 5.00 × 101 | 5.159 × 101 | 1.591 |
| 2.548 × 10−1 | 2.121 × 10−1 | 4.263 × 10−2 | |
| 6.000 × 10−2 | 8.849 × 10−2 | 2.849 × 10−2 | |
| 1.000 × 10−1 | 7.111 × 10−2 | 2.889 × 10−2 | |
| 9.010 × 10−2 | 9.036 × 10−2 | 2.558 × 10−4 | |
| 1.498 × 10−1 | 3.121 × 10−1 | 1.624 × 10−1 | |
| 2.250 | 2.796 | 5.465 × 10−1 |
| Parameter | SMC | Metropolis | ||||
|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | |||
| 1.318 | 4.160 × 10−1 | 1.312 | 4.070 × 10−1 | |||
| 1.170 × 10−1 | 4.500 × 10−2 | 1.160 × 10−1 | 4.400 × 10−2 | |||
| 6.400 × 10−2 | 5.000 × 10−3 | 6.400 × 10−2 | 5.000 × 10−3 | |||
| 1.816 | 1.510 × 10−1 | 1.818 | 1.430 × 10−1 | |||
| 1.010 × 10−10 | 1.400 × 10−11 | 1.012 × 10−10 | 1.020 × 10−11 | |||
| 3.105 × 101 | 4.939 | 3.099 × 101 | 5.032 | |||
| A | 5.007 × 101 | 4.962 | 5.001 × 101 | 5.043 | ||
| 2.950 × 10−1 | 4.400 × 10−2 | 2.960 × 10−1 | 4.400 × 10−2 | |||
| 2.240 × 10−1 | 4.000 × 10−2 | 2.240 × 10−1 | 4.000 × 10−2 | |||
| 1.160 × 10−1 | 3.400 × 10−2 | 1.170 × 10−1 | 3.400 × 10−2 | |||
| 1.650 × 10−1 | 4.700 × 10−2 | 1.670 × 10−1 | 4.900 × 10−2 | |||
| 8.800 × 10−2 | 5.000 × 10−3 | 8.800 × 10−2 | 5.000 × 10−3 | |||
| 2.508 | 8.800 × 10−2 | 2.507 | 8.500 × 10−2 | |||
| 3.476 × 107 | 9.728 × 106 | 3.421 × 107 | 9.683 × 106 | |||
| Parameter | DEMetropolis | DEMetropolisZ | ||||
| Mean | SD | Mean | SD | |||
| 1.318 | 3.640 × 10−1 | 1.346 | 3.960 × 10−1 | |||
| 1.140 × 10−1 | 4.500 × 10−2 | 1.150 × 10−1 | 4.400 × 10−2 | |||
| 6.400 × 10−2 | 5.000 × 10−3 | 6.400 × 10−2 | 5.000 × 10−3 | |||
| 1.827 | 1.510 × 10−1 | 1.829 | 1.510 × 10−1 | |||
| 1.010 × 10−10 | 1.030 × 10−11 | 1.013 × 10−10 | 1.010 × 10−11 | |||
| 3.141 × 101 | 4.791 | 3.105 × 101 | 4.847 | |||
| A | 5.025 × 101 | 4.655 | 5.024 × 101 | 4.807 | ||
| 2.950 × 10−1 | 4.000 × 10−2 | 2.920 × 10−1 | 4.300 × 10−2 | |||
| 2.240 × 10−1 | 3.800 × 10−2 | 2.240 × 10−1 | 3.800 × 10−2 | |||
| 1.180 × 10−1 | 3.200 × 10−2 | 1.170 × 10−1 | 3.200 × 10−2 | |||
| 1.630 × 10−1 | 4.300 × 10−2 | 1.690 × 10−1 | 4.100 × 10−2 | |||
| 8.800 × 10−2 | 5.000 × 10−3 | 8.800 × 10−2 | 5.000 × 10−3 | |||
| 2.513 | 8.200 × 10−2 | 2.515 | 8.600 × 10−2 | |||
| 3.107 × 107 | 8.603 × 106 | 3.331 × 107 | 9.154 × 106 | |||
| Algorithm | Computational Time (s) |
|---|---|
| SMC | 1.675 × 104 |
| Metropolis-Hastings | 3.798 × 103 |
| DEMetropolis | 6.570 × 102 |
| DEMetropolisZ | 3.100 × 102 |
| least_squares | 5.910 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antonini, E.; Mu, G.; Sansaloni-Pastor, S.; Varma, V.; Kabak, R. MCMC Methods for Parameter Estimation in ODE Systems for CAR-T Cell Cancer Therapy. Cancers 2024, 16, 3132. https://doi.org/10.3390/cancers16183132
Antonini E, Mu G, Sansaloni-Pastor S, Varma V, Kabak R. MCMC Methods for Parameter Estimation in ODE Systems for CAR-T Cell Cancer Therapy. Cancers. 2024; 16(18):3132. https://doi.org/10.3390/cancers16183132
Chicago/Turabian StyleAntonini, Elia, Gang Mu, Sara Sansaloni-Pastor, Vishal Varma, and Ryme Kabak. 2024. "MCMC Methods for Parameter Estimation in ODE Systems for CAR-T Cell Cancer Therapy" Cancers 16, no. 18: 3132. https://doi.org/10.3390/cancers16183132
APA StyleAntonini, E., Mu, G., Sansaloni-Pastor, S., Varma, V., & Kabak, R. (2024). MCMC Methods for Parameter Estimation in ODE Systems for CAR-T Cell Cancer Therapy. Cancers, 16(18), 3132. https://doi.org/10.3390/cancers16183132