A Control and Detecting System of Micro-Near-Infrared Spectrometer Based on a MOEMS Scanning Grating Mirror

Abstract
:1. Introduction
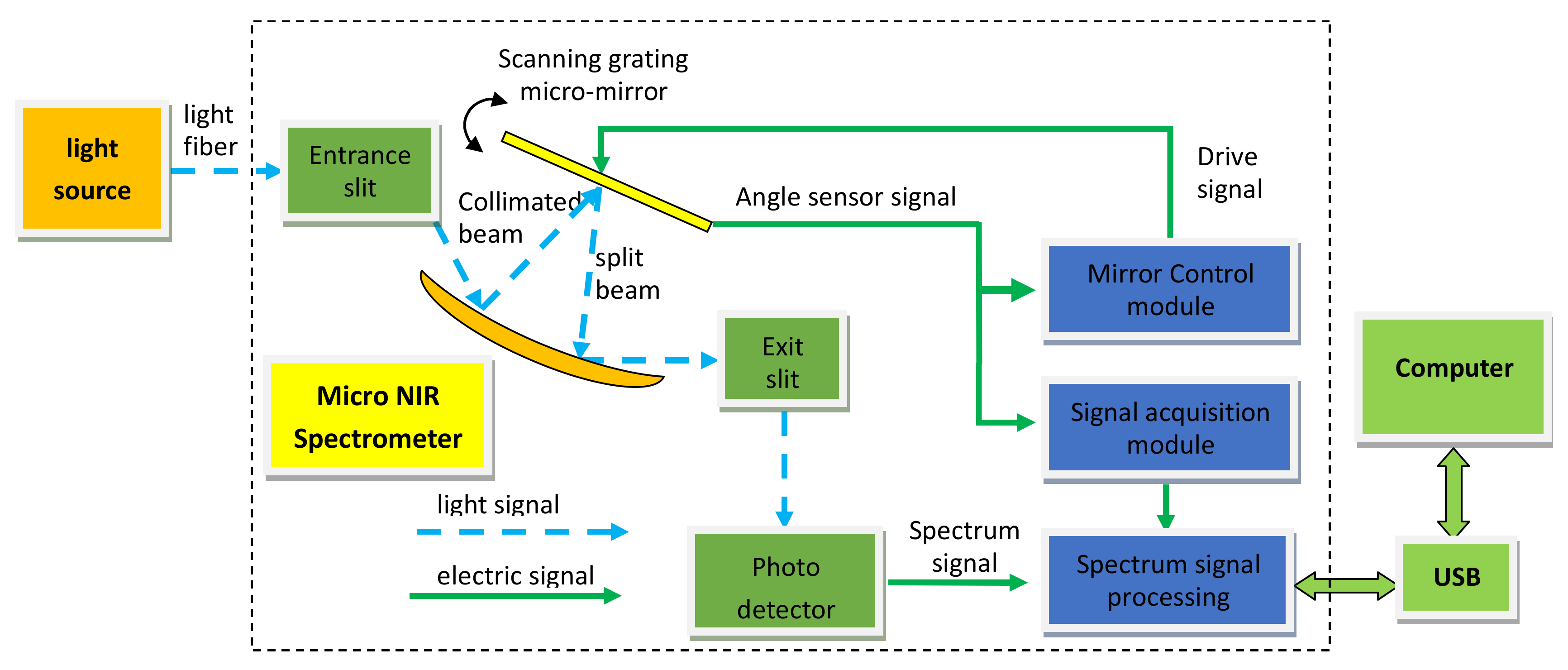
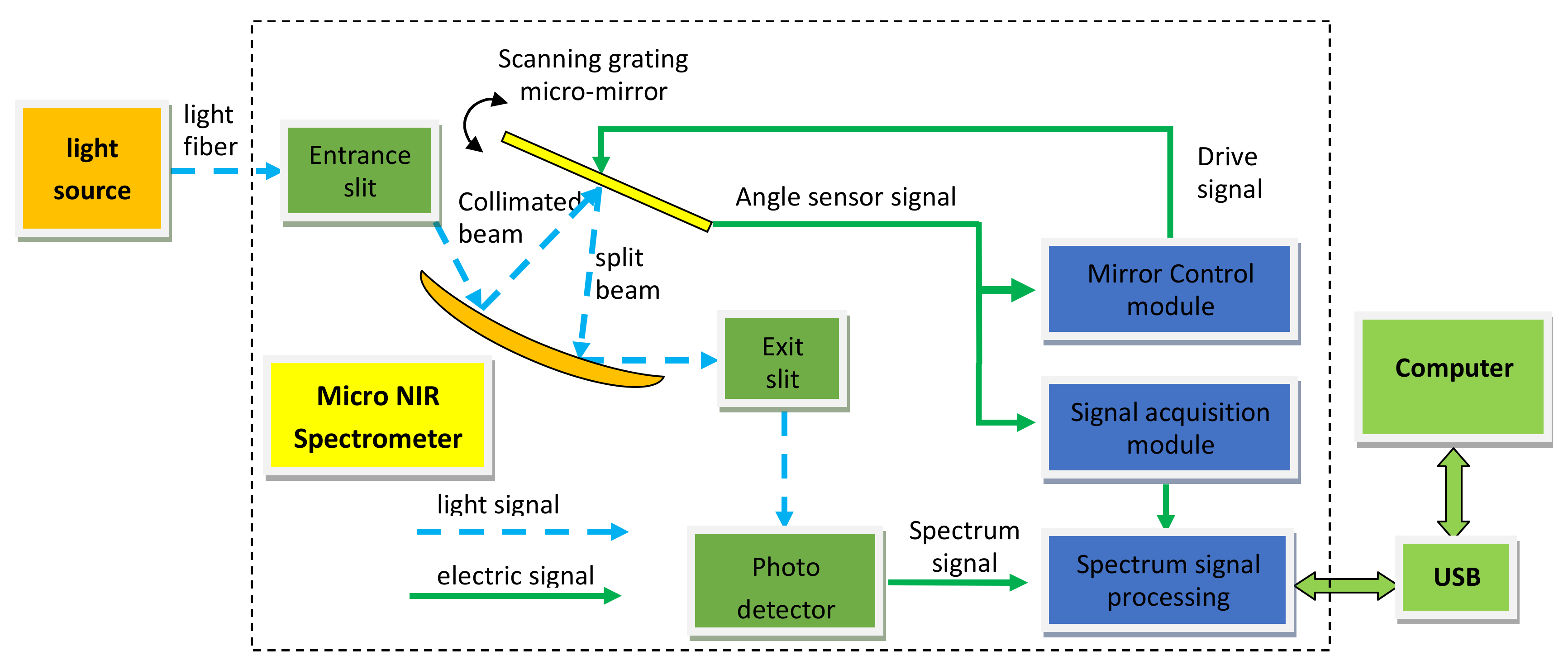
2. The Principle of the System Structure
3. The Circuits and System Design
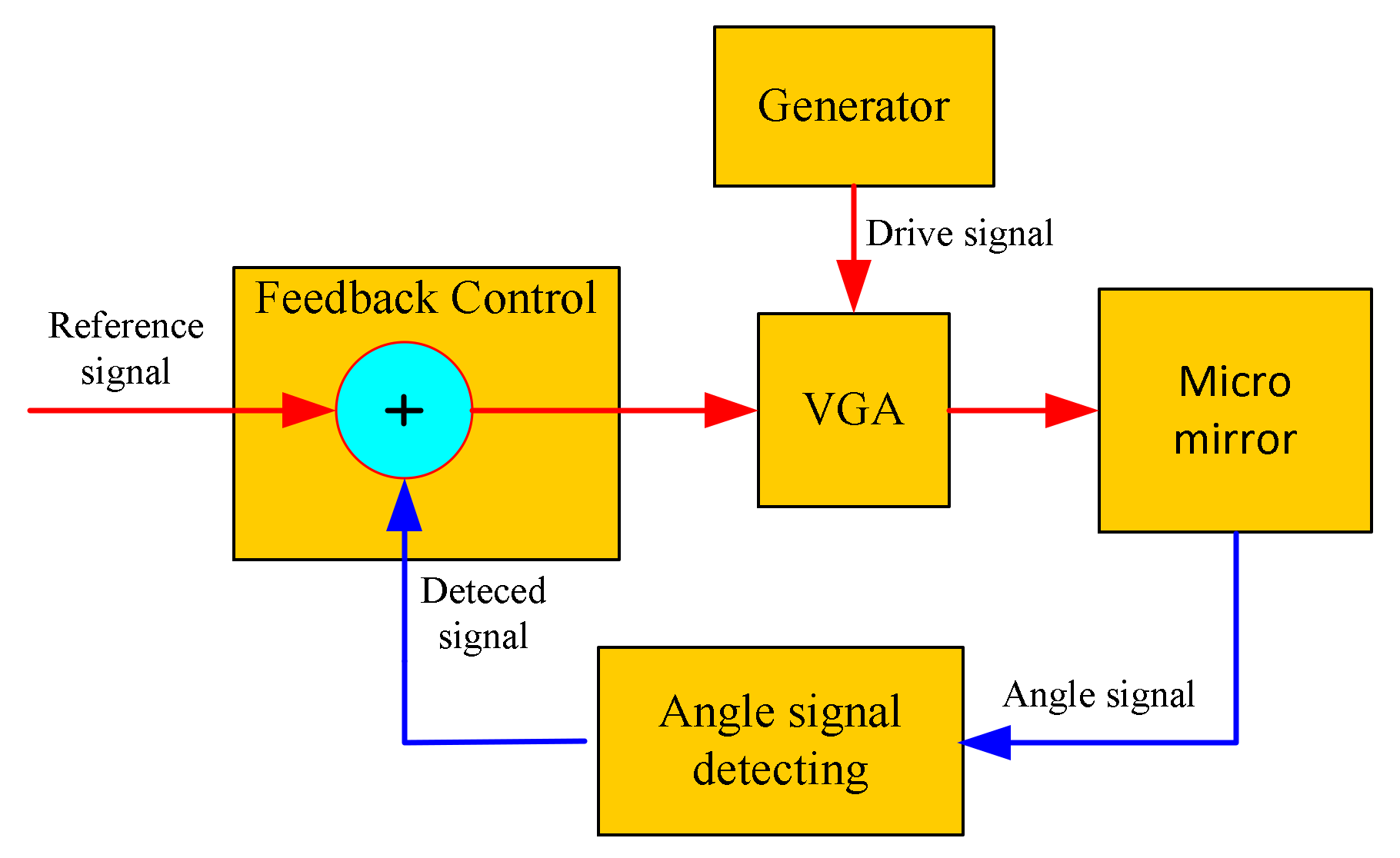
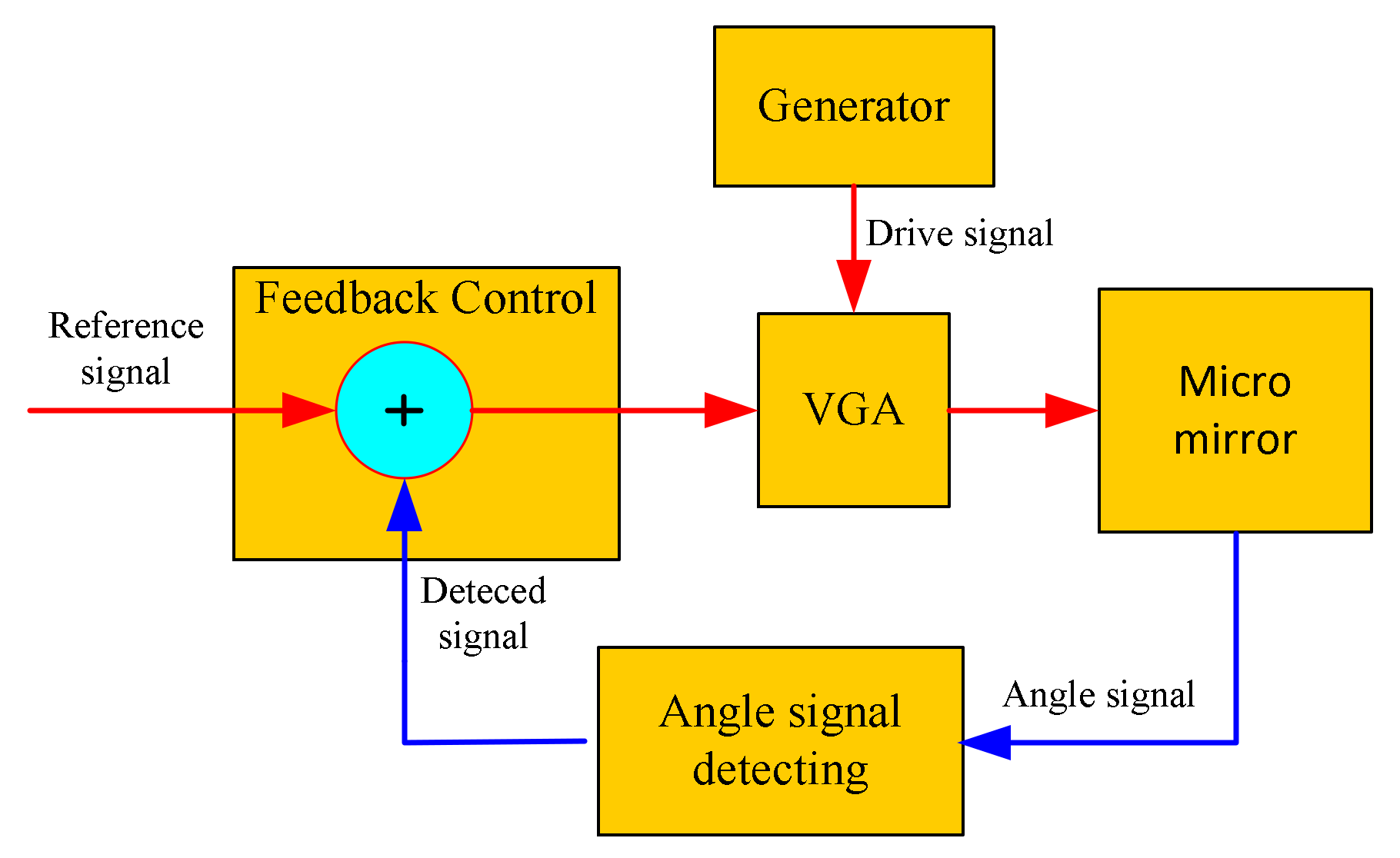
3.1. The Mirror Control System
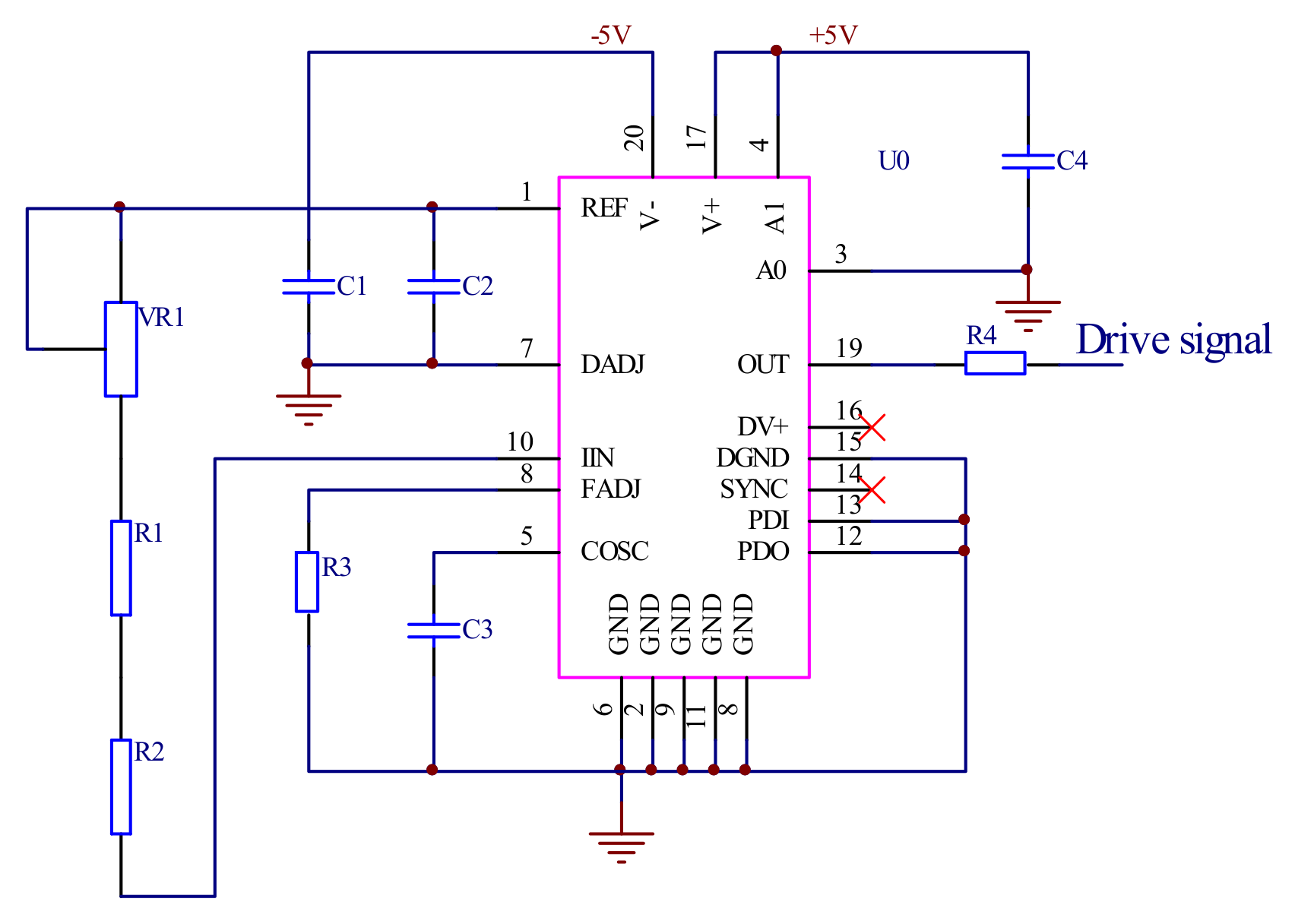
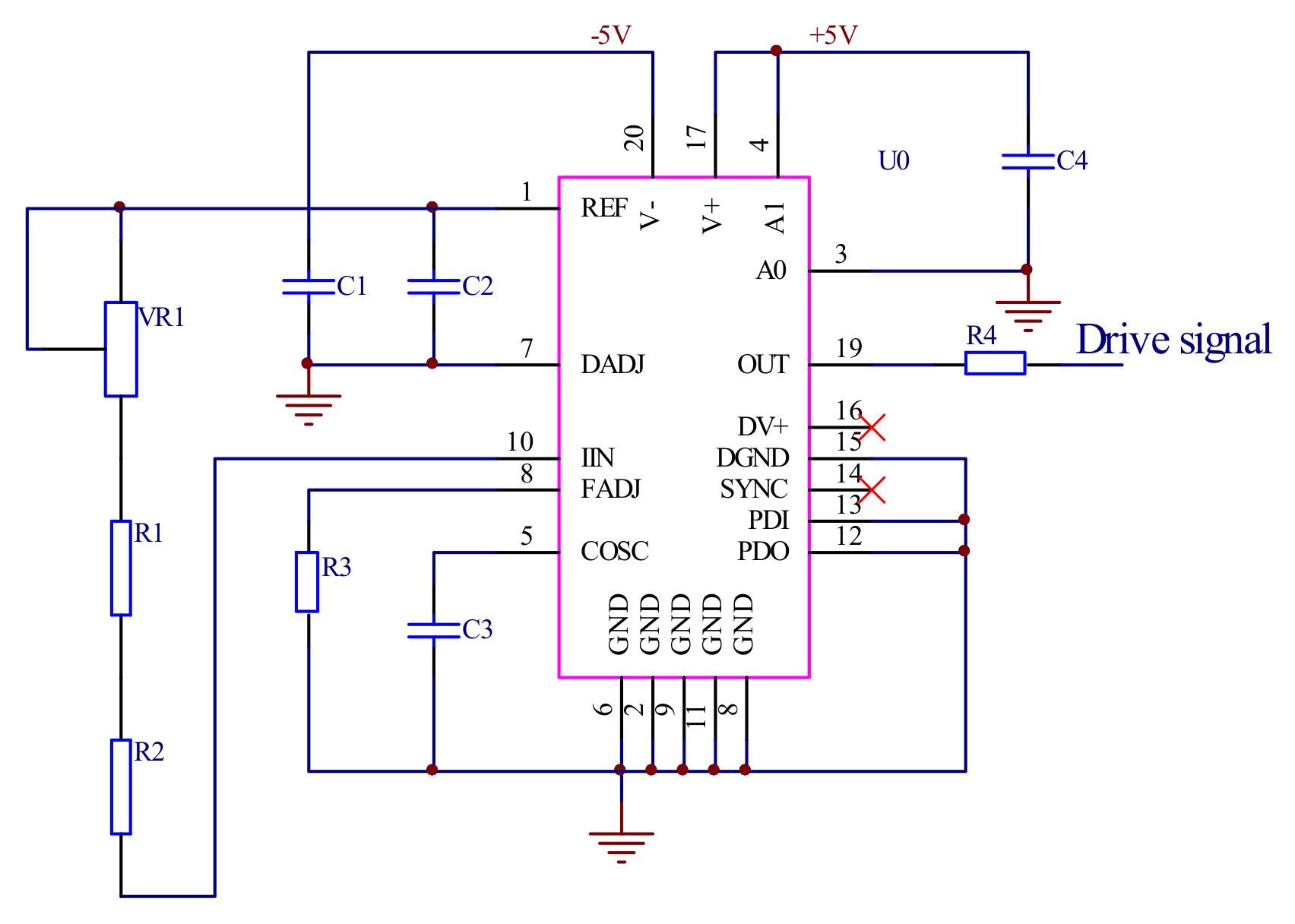
3.1.1. The Drive Signal Generate Module
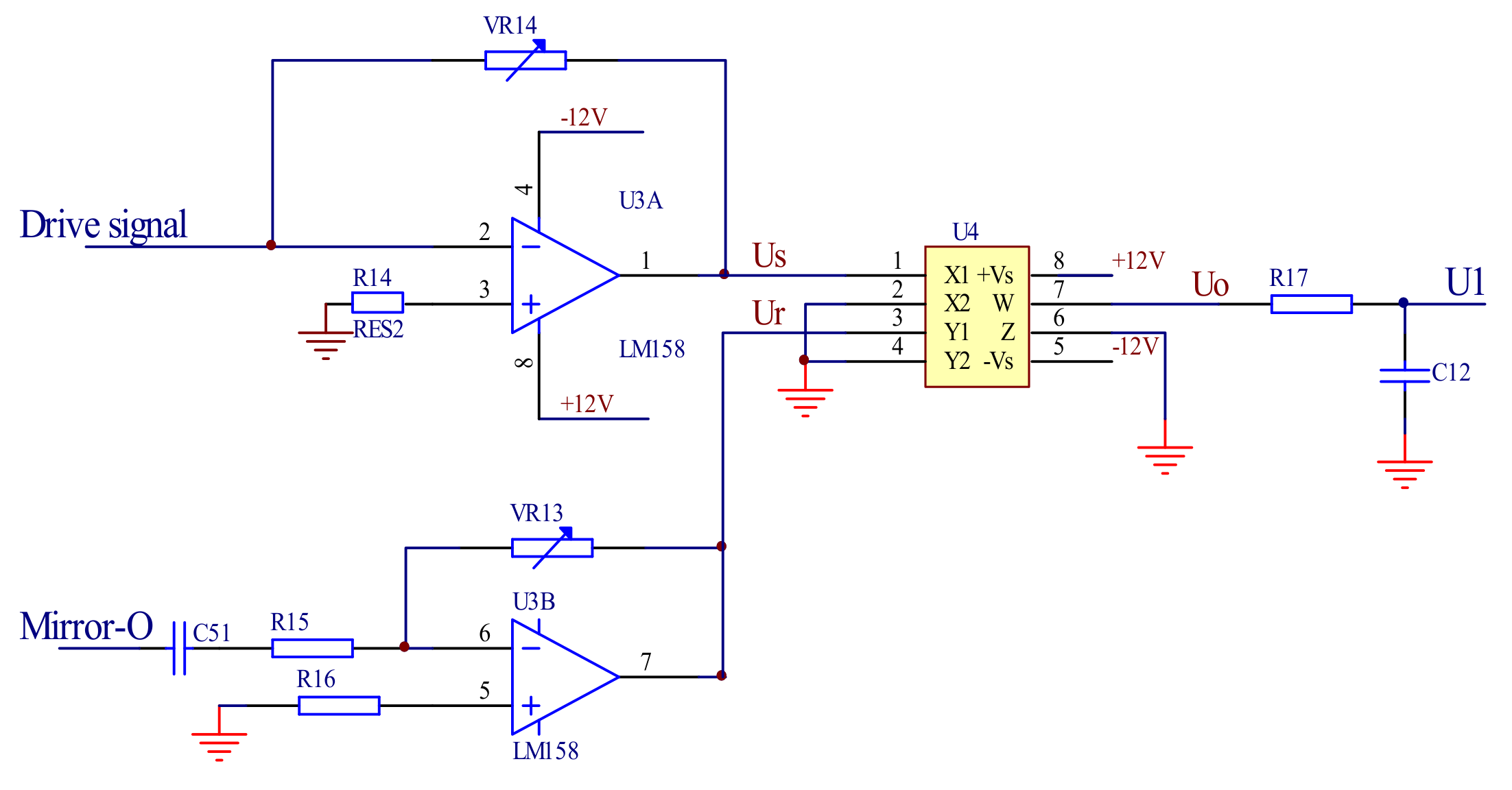
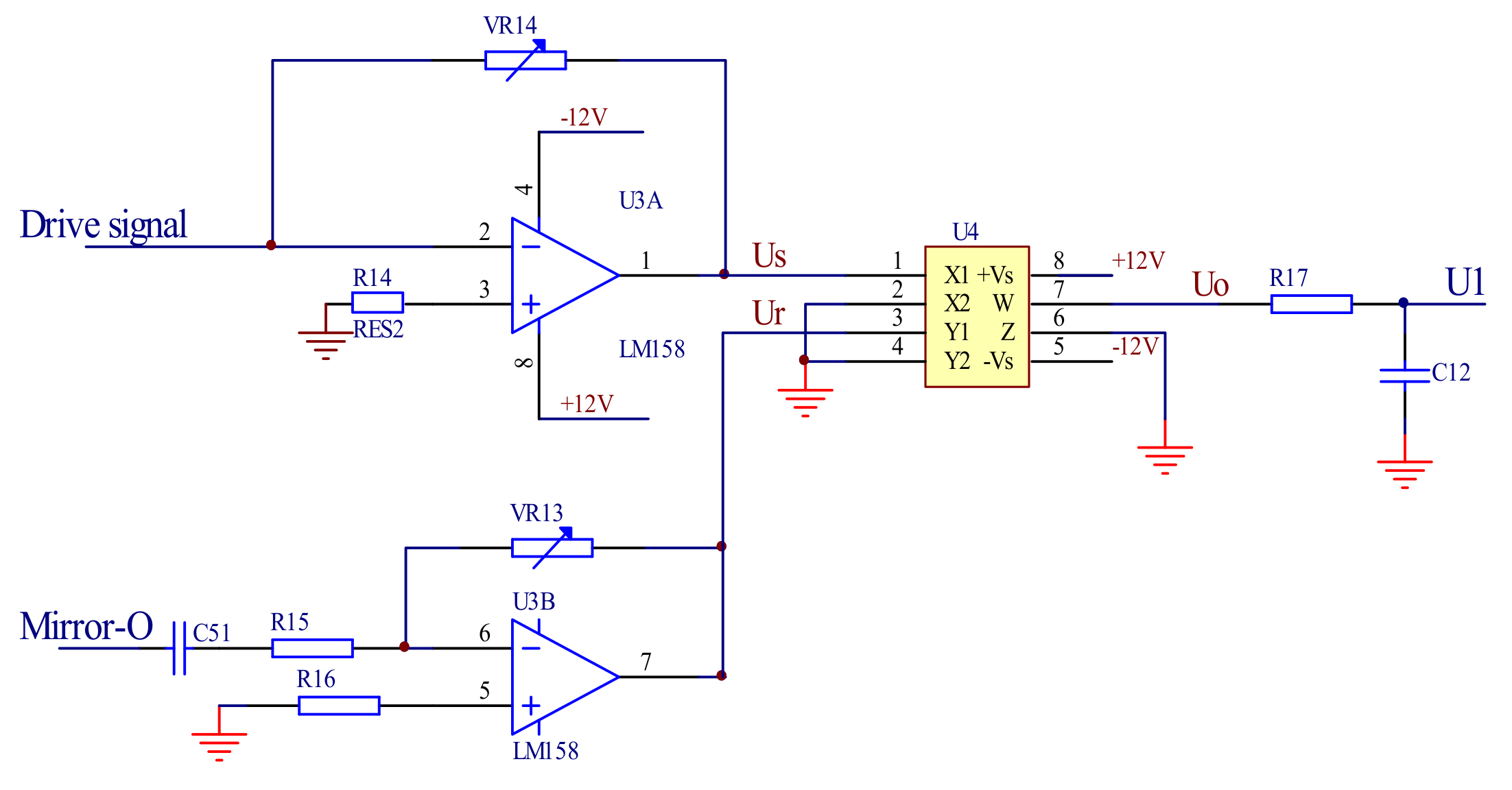
3.1.2. The Amplitude Detection Module
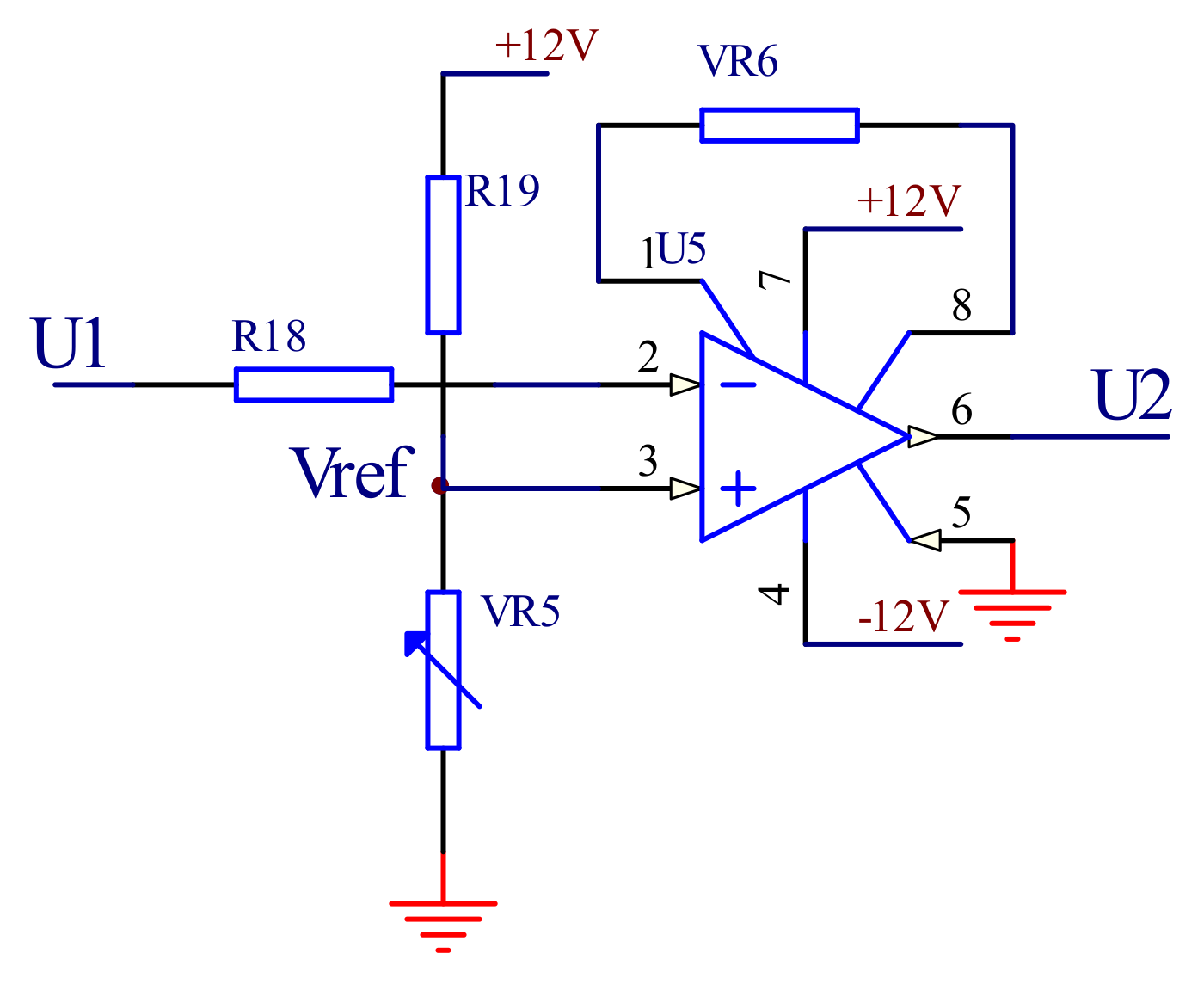
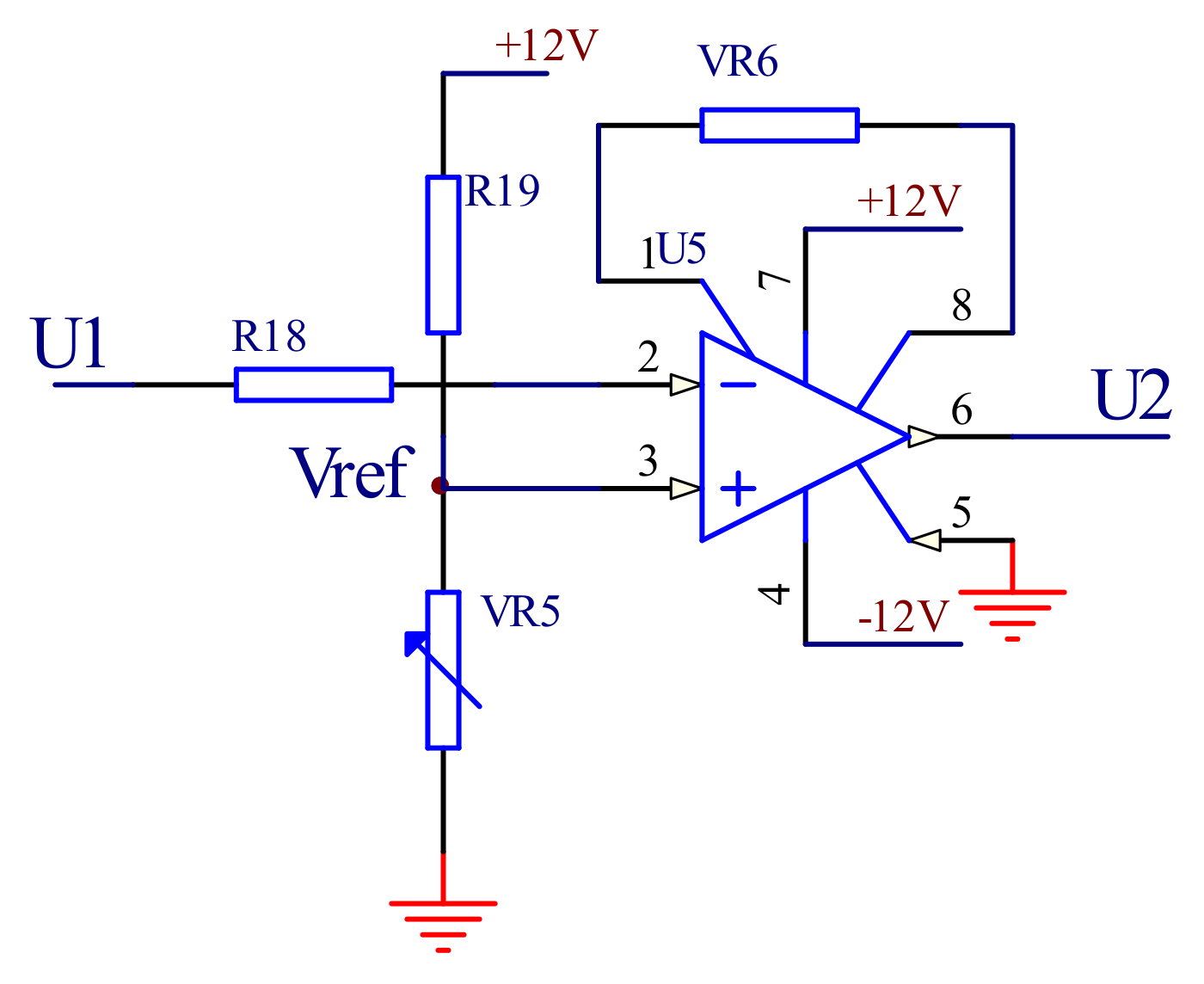
3.1.3. The Feedback Control Module
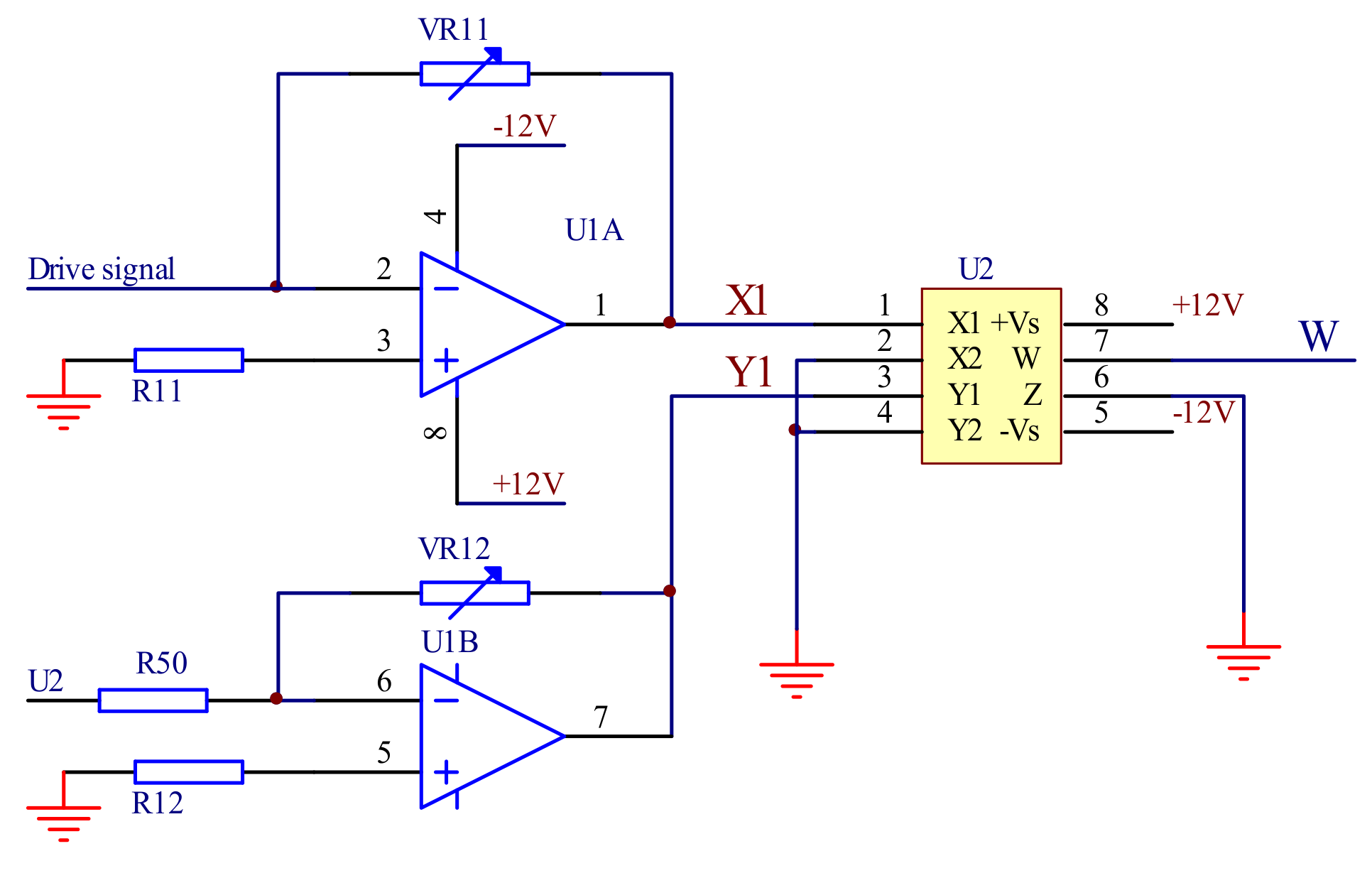
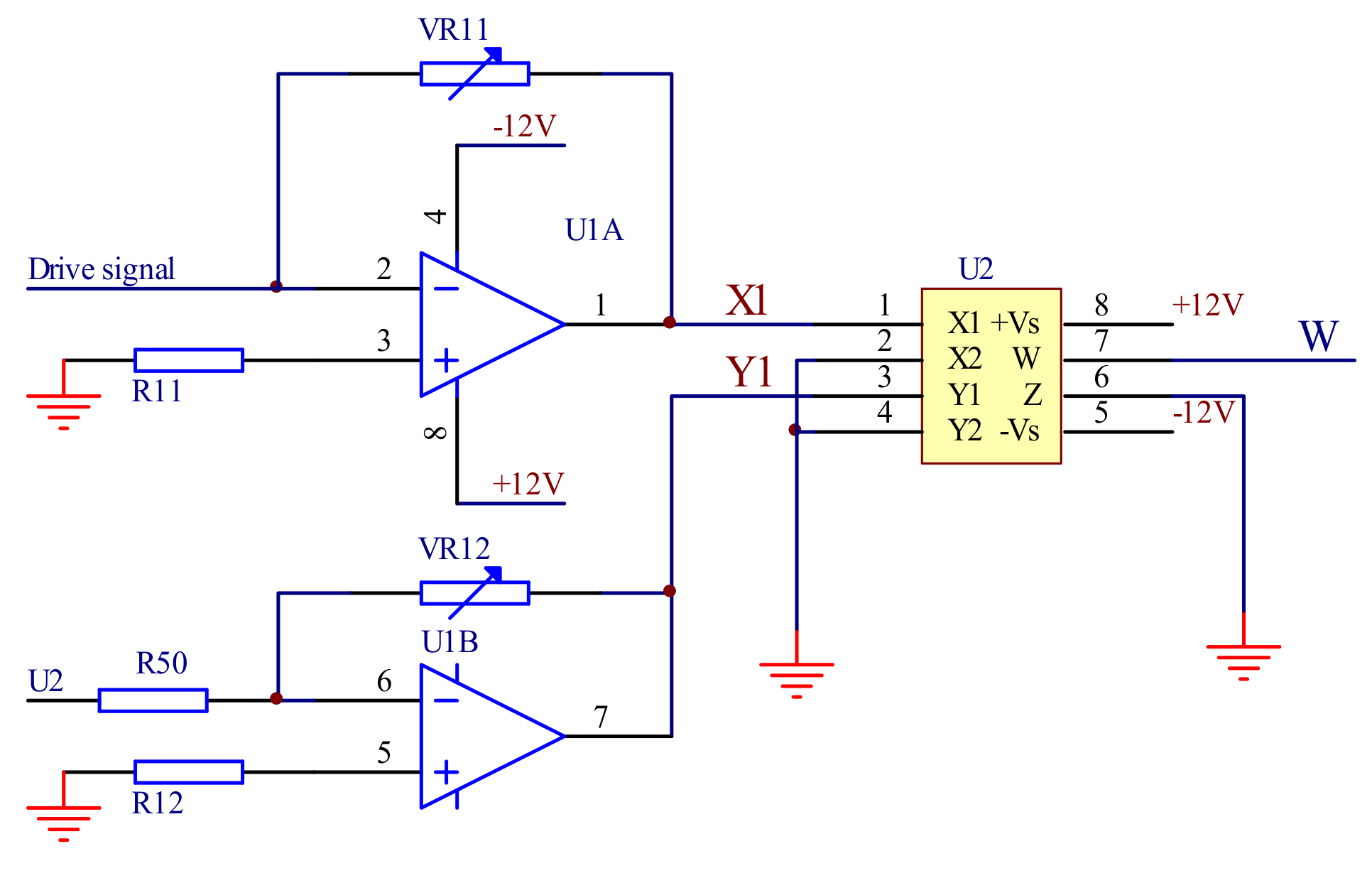
3.1.4. The Variable Gain Amplification Module
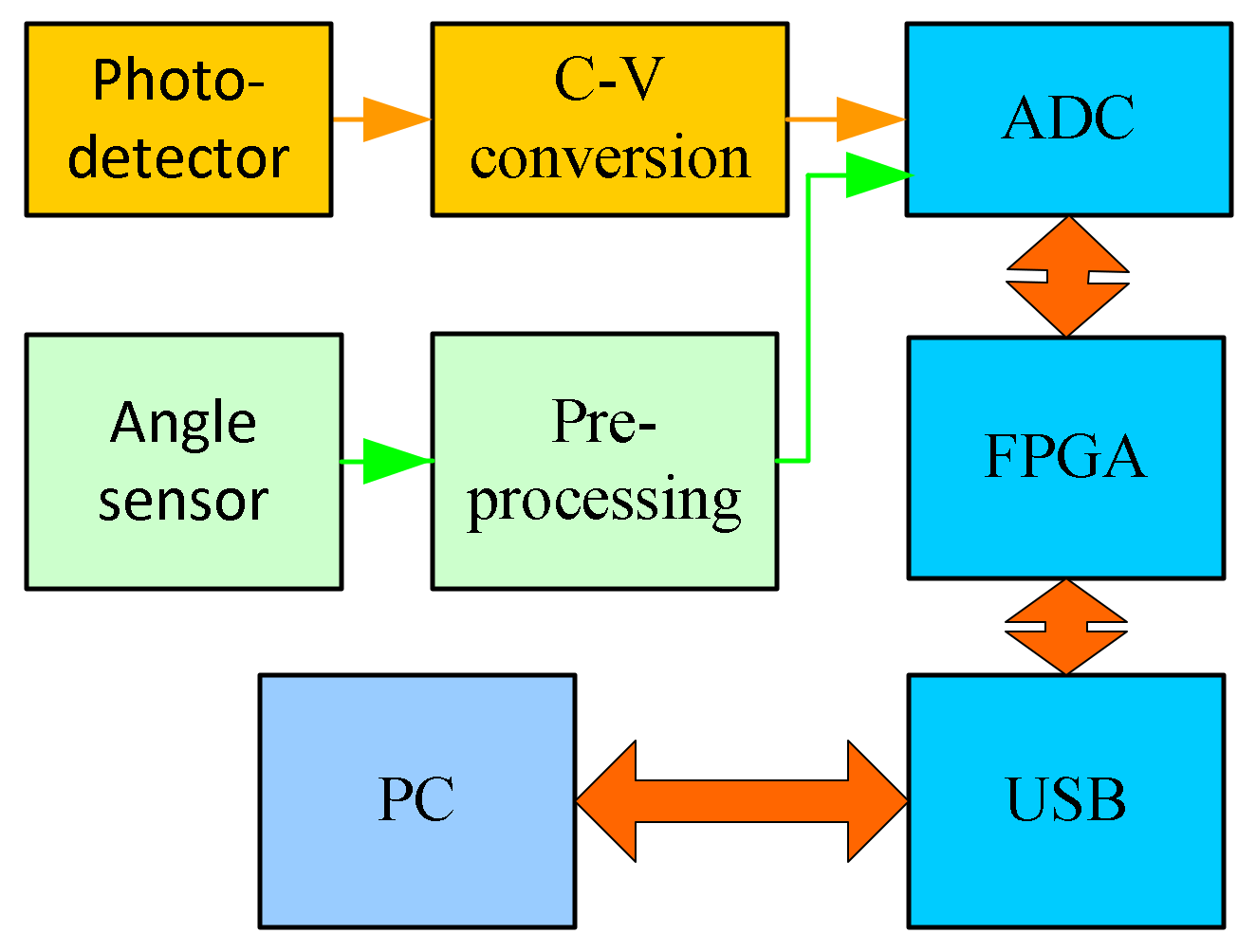
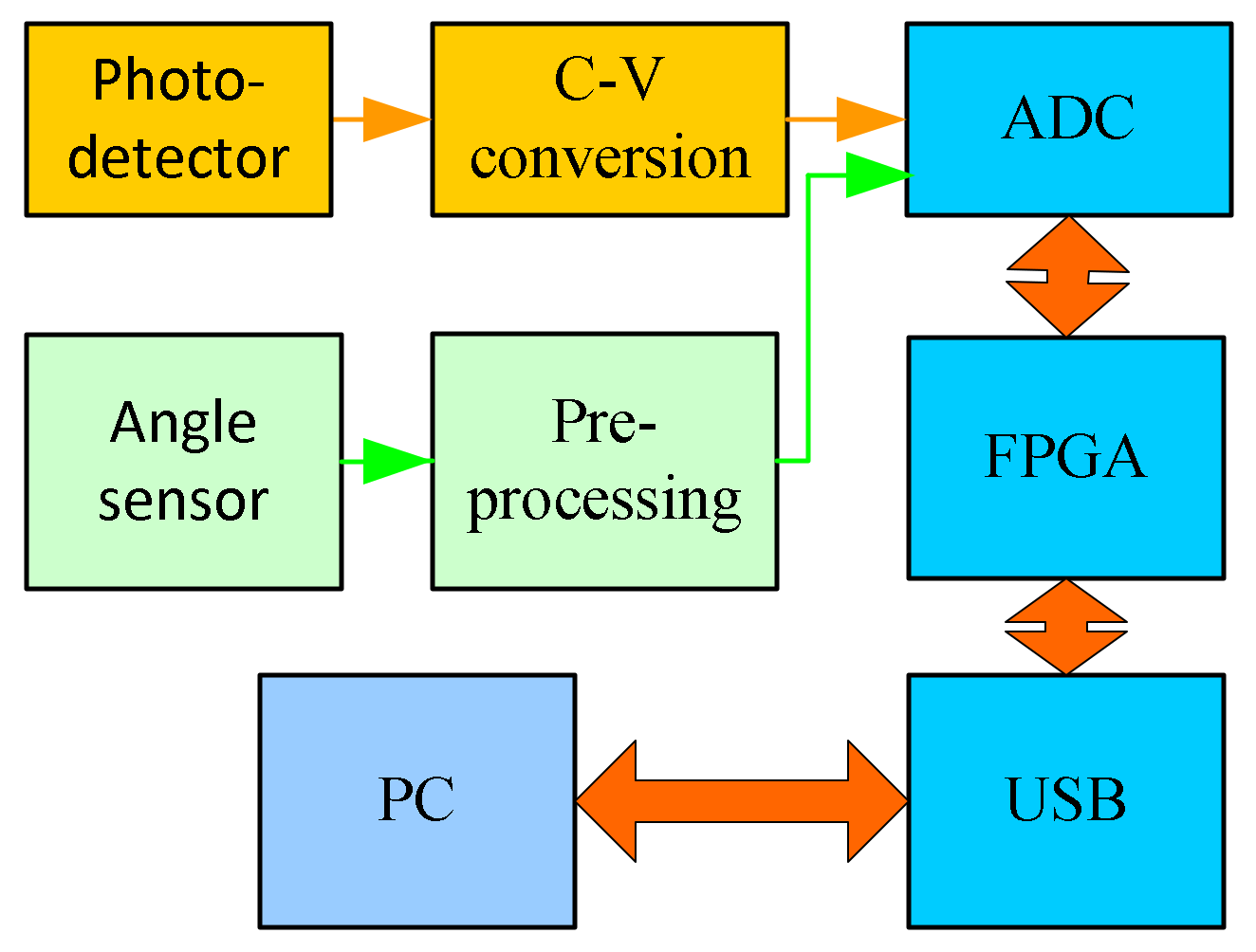
3.2. The Signal Detecting System
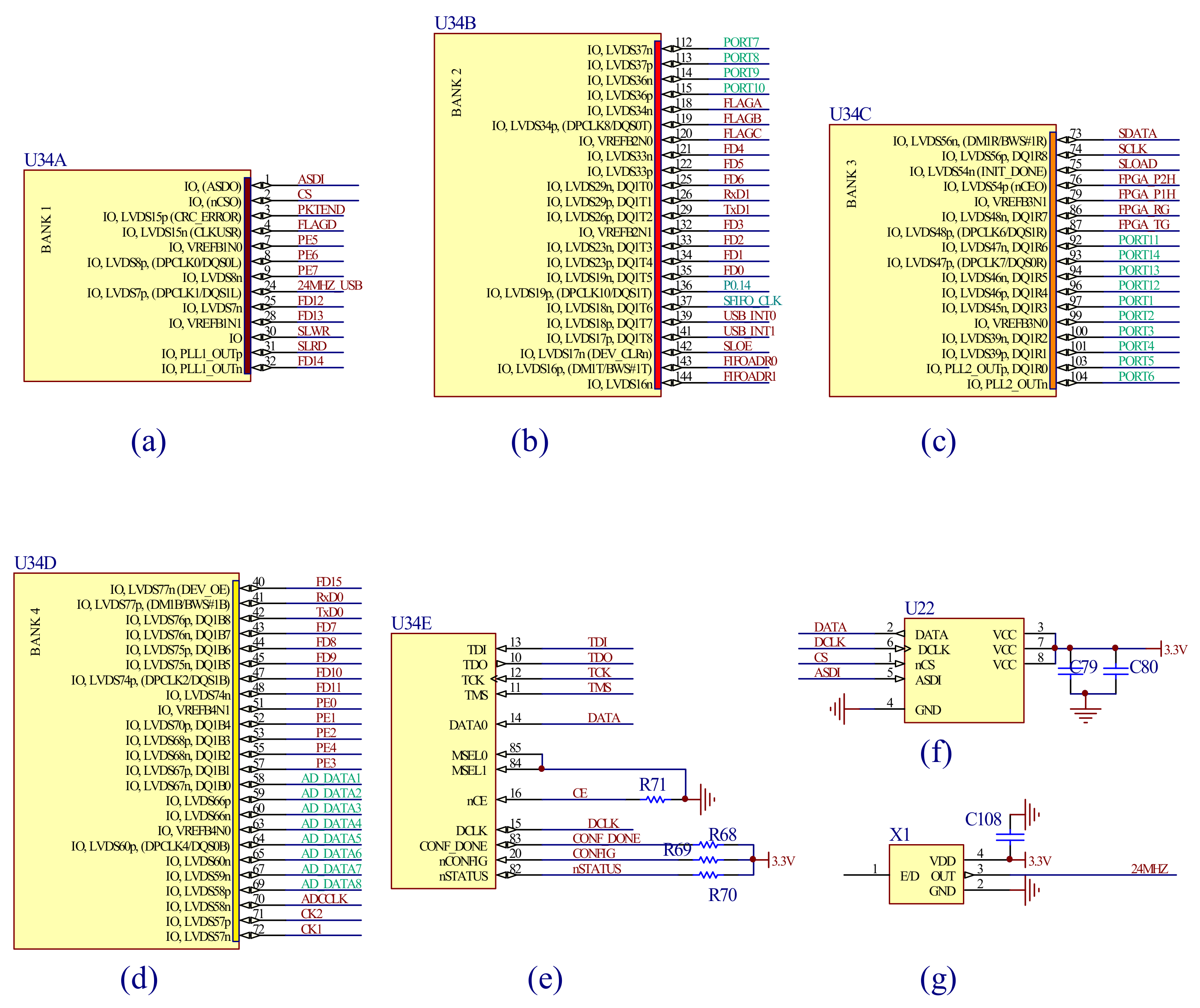
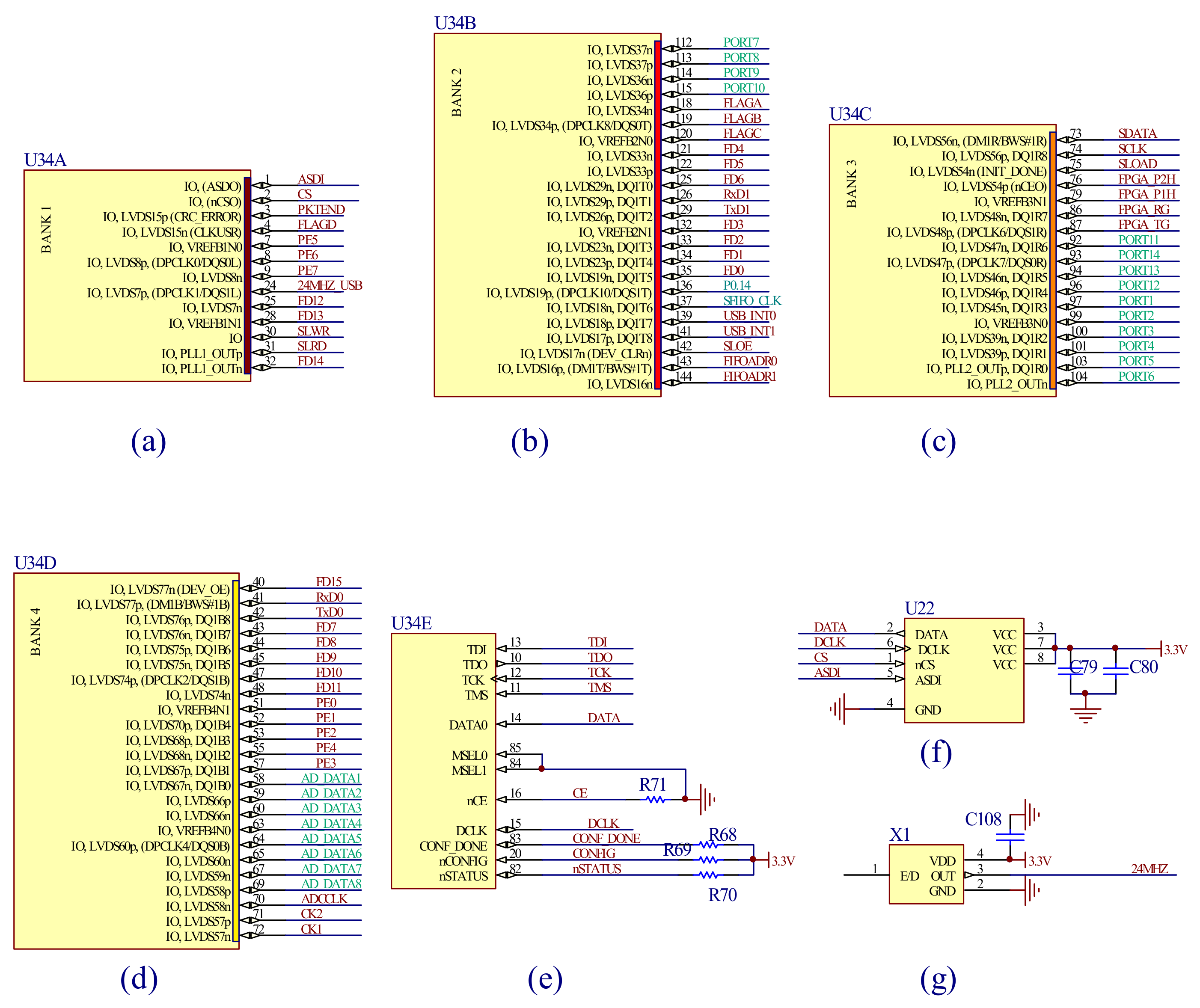
3.2.1. The Field Programmable Gate Array (FPGA) Main Control Module
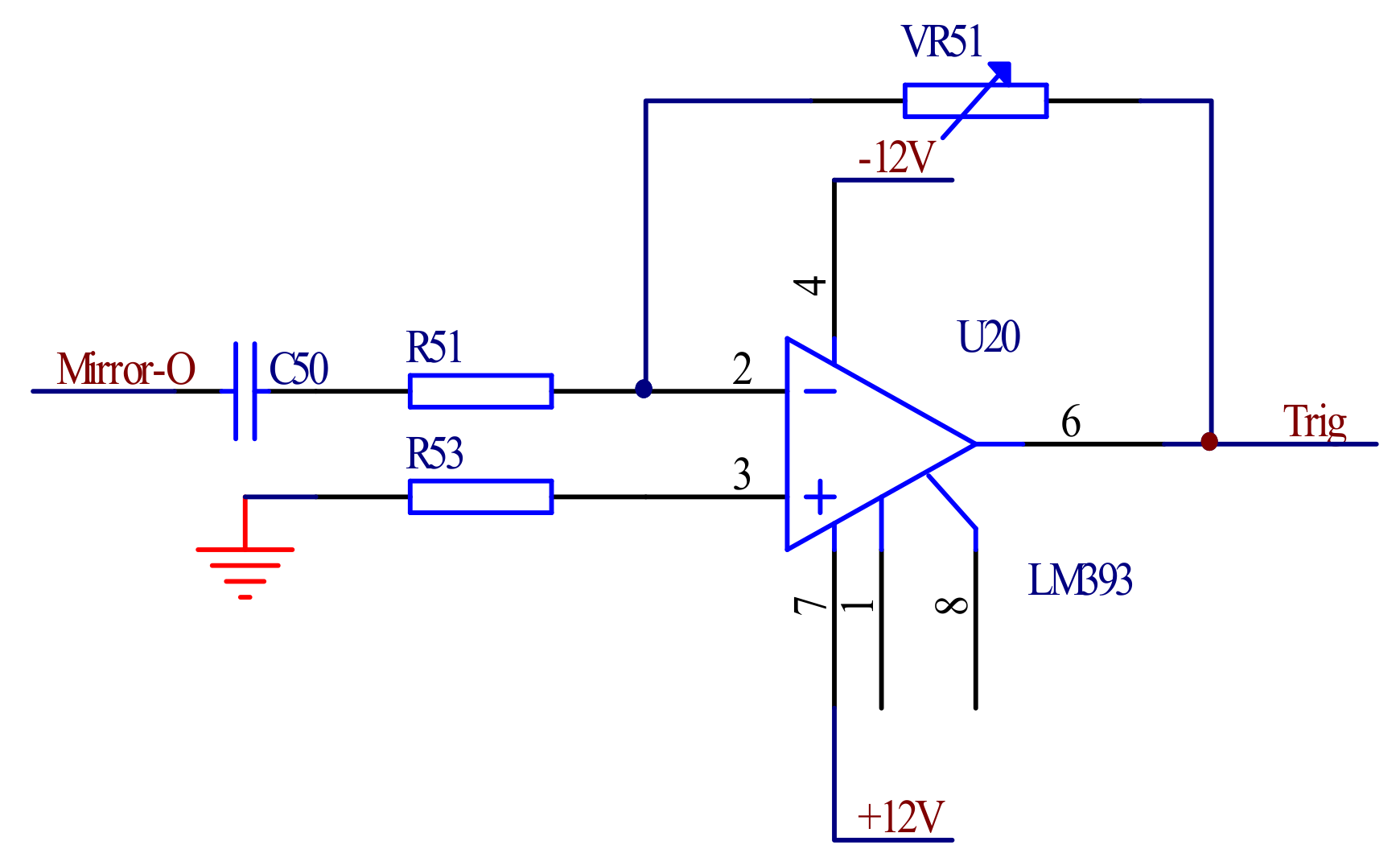
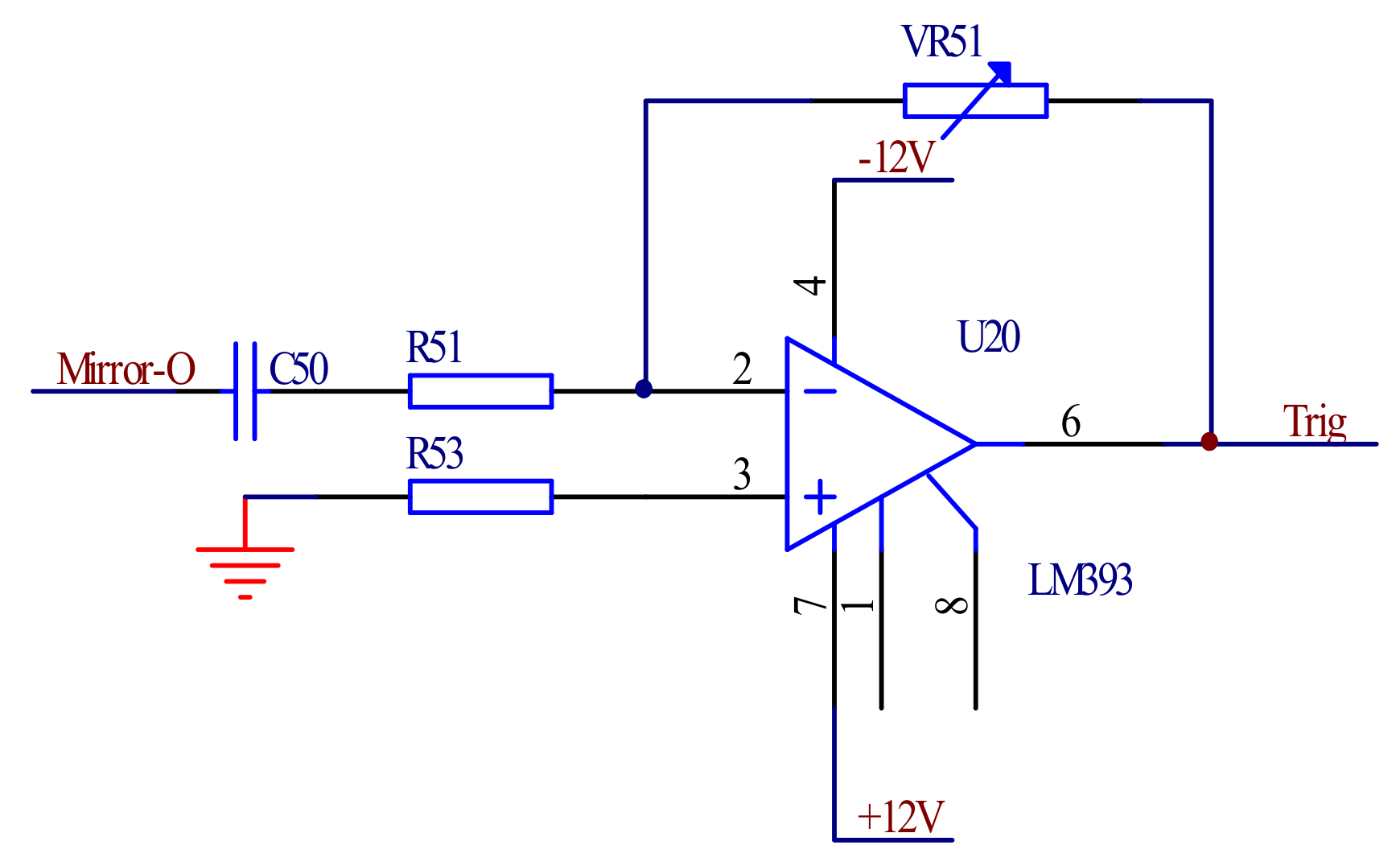
3.2.2. The Synchronous Trigger Module
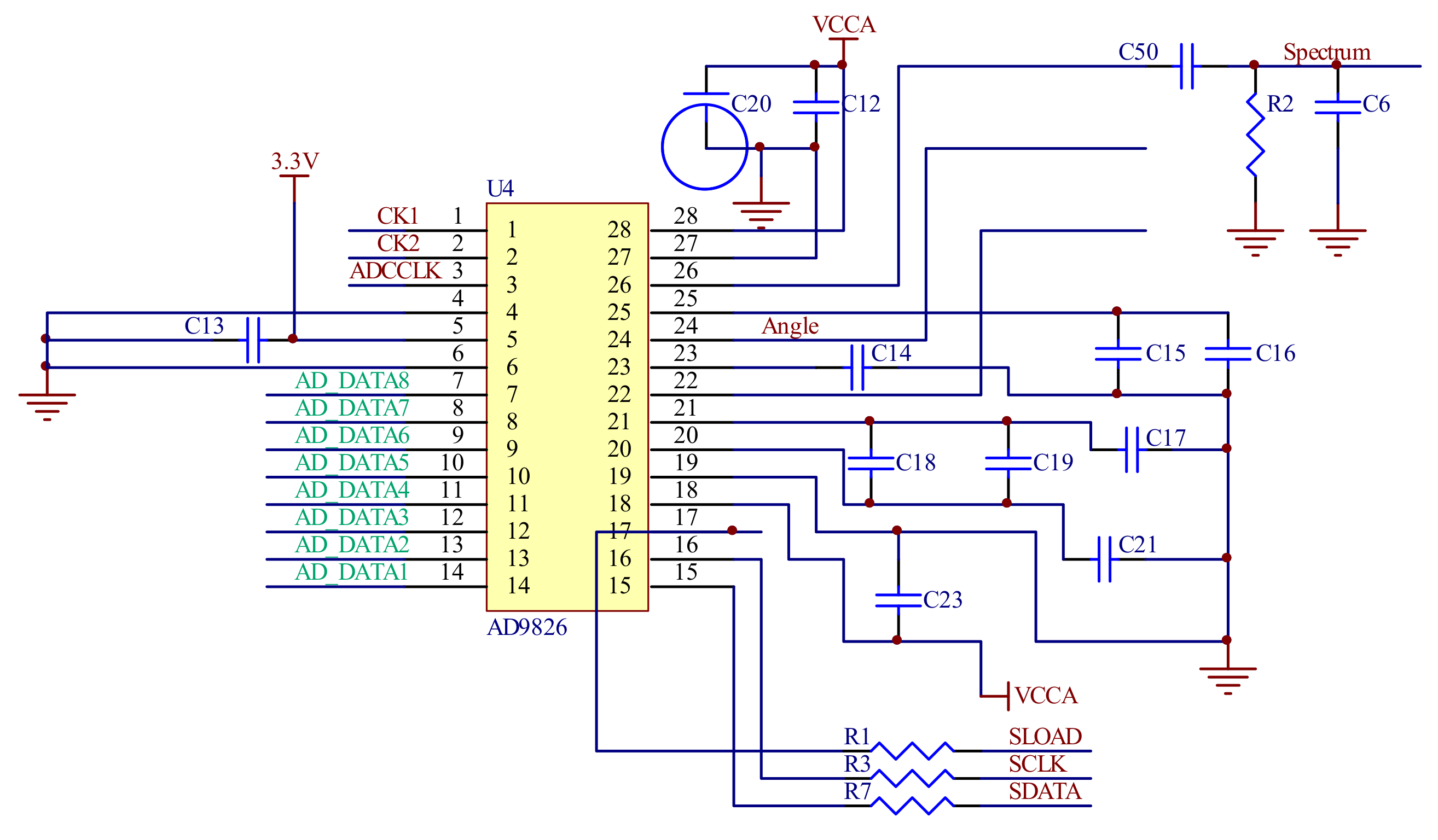
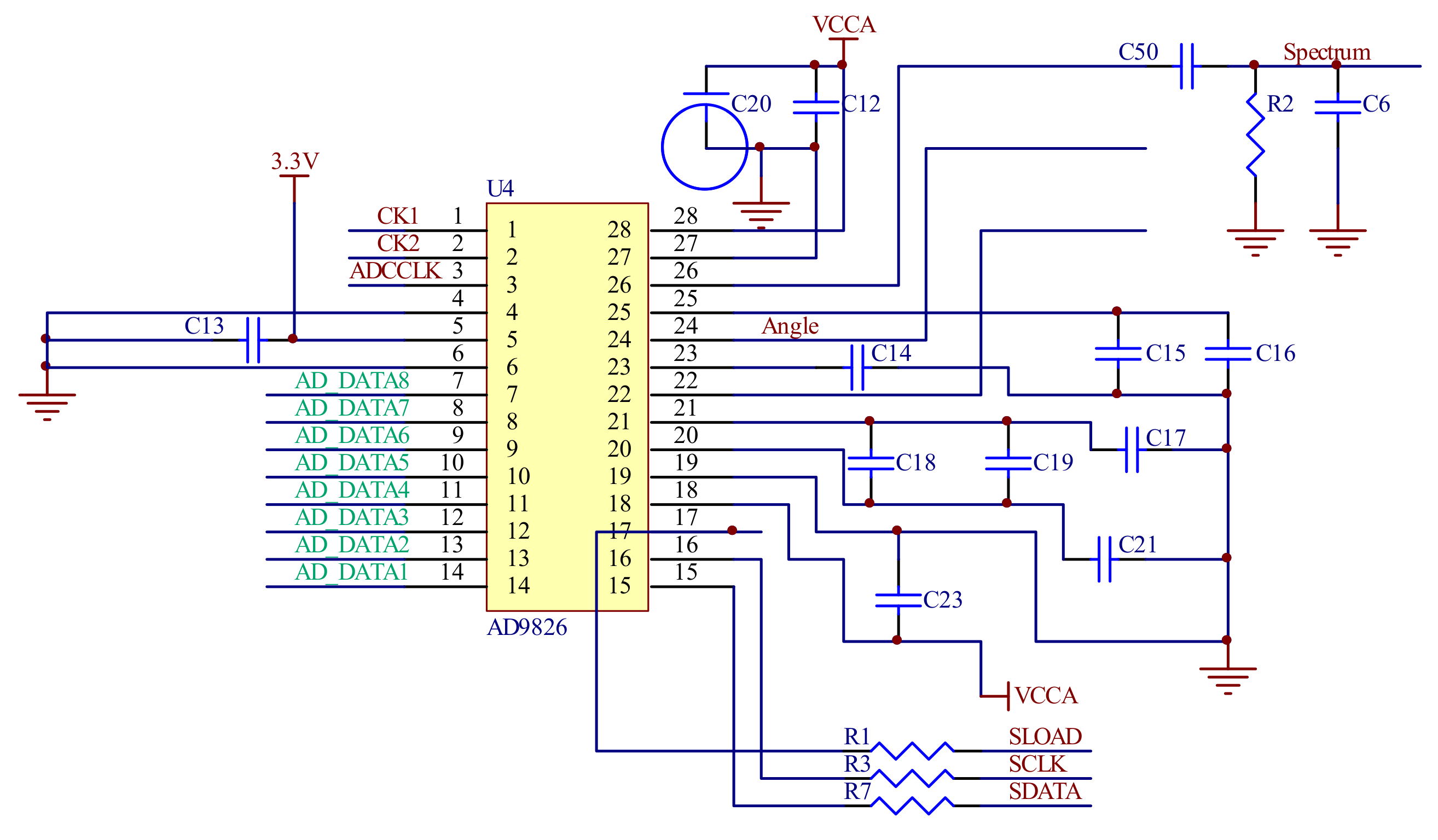
3.2.3. The Analog-Digital Conversion (ADC) Module
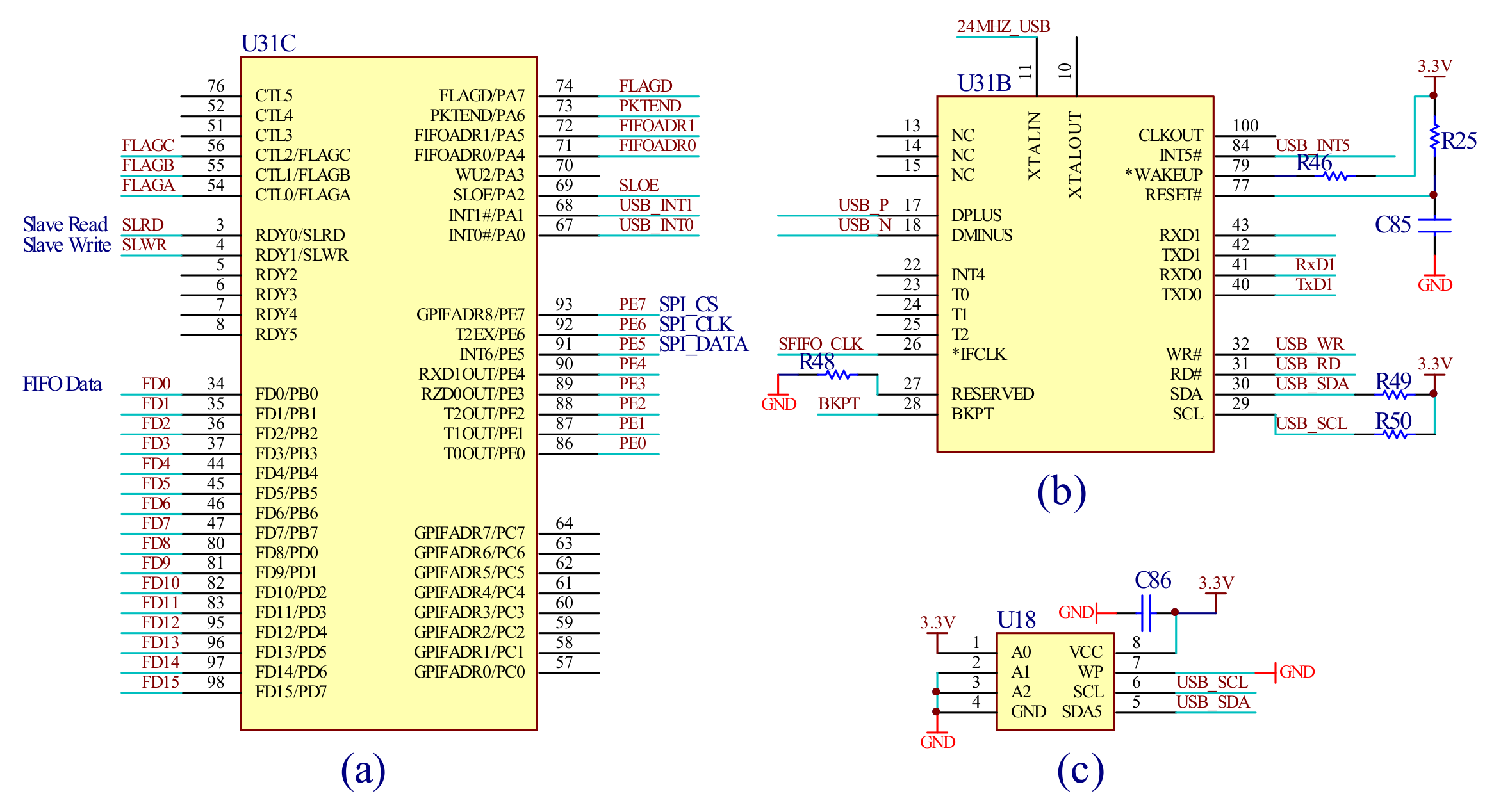
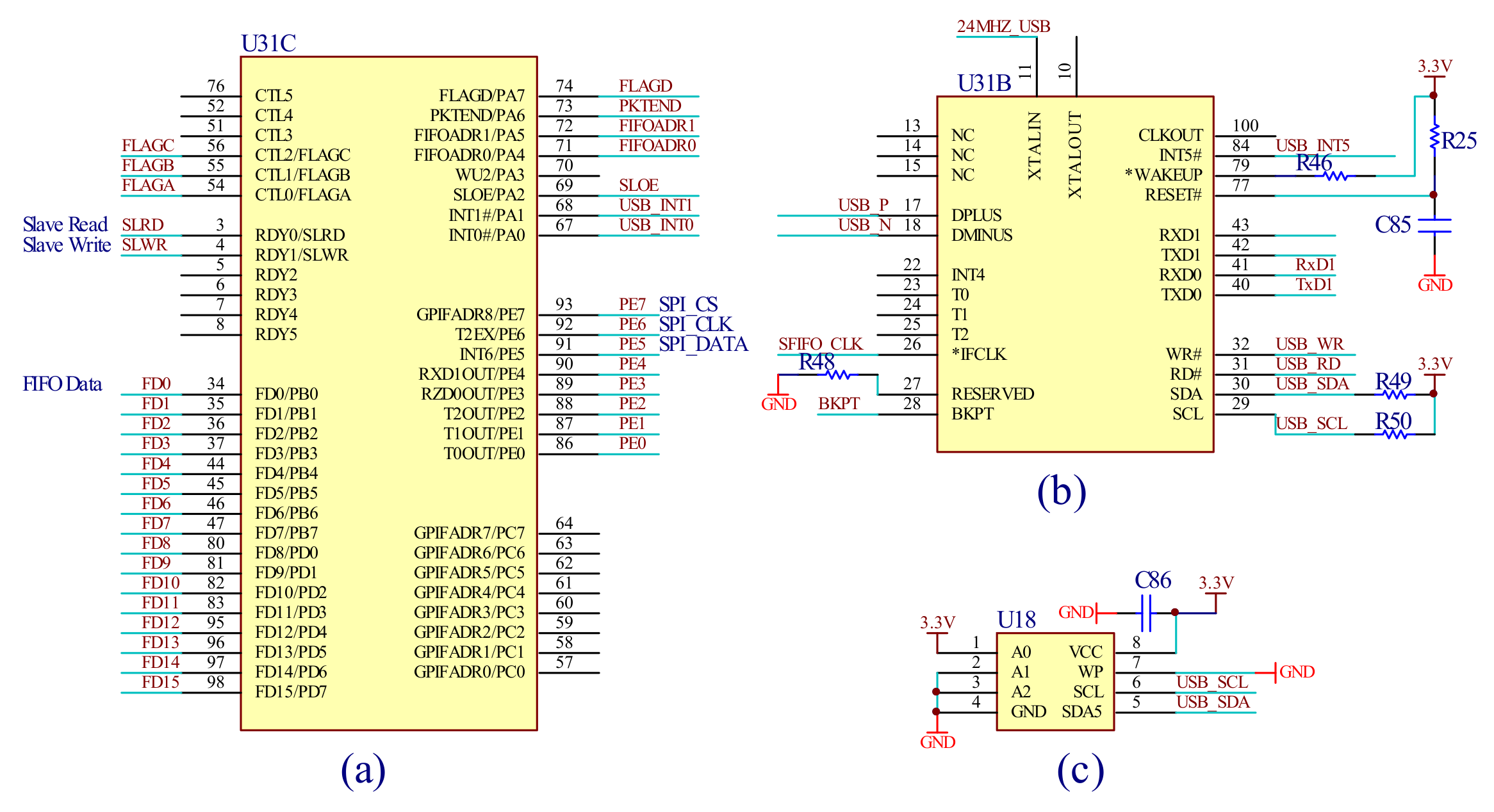
3.2.4. The Universal Serial Bus (USB) Interface Module
4. Experiment and Result
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Navrátil, M.; Christian, A.; Mandenius, C.F. On-line multisensor monitoring of yogurt and filmjolk fermentations on production scale. J. Agric. Food Chem. 2004, 52, 415–420. [Google Scholar] [CrossRef] [PubMed]
- Andre, N.; Young, T.M.; Rials, T.G. On-line monitoring of the buffer capacity of particleboard furnish by near-infrared spectroscopy. Appl. Spectrosc. 2006, 60, 1204–1209. [Google Scholar] [CrossRef] [PubMed]
- Porep, J.U.; Kammerer, D.R.; Carle, R. On-line application of near infrared (NIR) spectroscopy in food production Trends in Food. Sci. Technol. 2015, 46, 211–230. [Google Scholar]
- Mora-Ruiz, M.E.; Salvador, M.D.; Cancho-Grande, B.; Fregapane, G. Assessment of polar phenolic compounds of virgin olive oil by NIR and mid-IR spectroscopy and their impact on quality. Eur. J. Lipid Sci. Technol. 2017, 119. [Google Scholar] [CrossRef]
- Kong, S.; Wijngaards, D.; Wolffenbuttel, R. Infrared micro-spectrometer based on a diffraction grating. Sens. Actuators A 2001, 92, 88–95. [Google Scholar] [CrossRef]
- Yang, J.C.; Jung, H.; Lee, G.J.; Kang, J.Y.; Koo, J.G.; Park, J.M.; Park, K.S.; Kong, S.H. Micro-electro-mechanical-systems-based infrared spectrometer composed of multi-slit grating and bolometer array. Jpn. J. Appl. Phys. 2008, 47, 6943–6948. [Google Scholar] [CrossRef]
- Kraft, M.; Kenda, A.; Frank, A.; Scherf, W.; Heberer, A.; Sandner, T.; Schenk, H.; Zimmer, F. Single-detector micro-electro-mechanical scanning grating spectrometer. Anal. Bioanal. Chem. 2006, 386, 1259–1266. [Google Scholar] [CrossRef] [PubMed]
- Kenda, A.; Frank, A.; Kraft, M.; Tortschanoff, A.; Sandner, T.; Schenk, H.; Scherf, W. Compact high-speed spectrometers based on MEMS devices with large amplitude in-plane actuators. Procedia Chem. 2009, 1, 556–559. [Google Scholar] [CrossRef]
- Kenda, A.; Kraft, M.; Baumgart, M.; Sandner, T.; Lüttjohann, S.; Simon, A. Advanced FT-IR high-speed spectrometer showing the feasibility of high performance optical MEMS based mid-IR Sensing. Procedia Eng. 2011, 25, 144–147. [Google Scholar] [CrossRef]
- Tortschanoff, A.; Lenzhofer, M.; Frank, A.; Sandner, T.; Schenk, H. Improved MEMS based FT-IR spectrometer. In Proceedings of the International Symposium on Optomechatronic Technologies, 2009, ISOT 2009, Istanbul, Turkey, 21–23 September 2009; pp. 116–121. [Google Scholar]
- Cho, A.R.; Han, A.; Ju, S.; Jeong, H.; Park, J.H.; Kim, I.; Bu, J.U.; Ji, C.H. Electromagnetic biaxial microscanner with mechanical amplification at resonance. Opt. Express 2015, 23, 16792–16802. [Google Scholar] [CrossRef] [PubMed]
- Zara, J.M.; Yazdanfar, S.; Rao, K.D.; Izatt, J.A.; Smith, S.W. Electrostatic micromachine scanning mirror for optical coherence tomography. Opt. Lett. 2003, 28, 628–630. [Google Scholar] [CrossRef] [PubMed]
- Jung, W.; Mccormick, D.T.; Zhang, J.; Wang, L.; Tien, N.C.; Chen, Z.P. Three-dimensional endoscopic optical coherence tomography by use of a two-axis microelectromechanical scanning mirror. Appl. Phys. Lett. 2006, 88, 163901–163933. [Google Scholar] [CrossRef]
- Tsai, J.C.; Wu, M.C. Design, fabrication, and characterization of a high fill-factor, large scan-angle, two-axis scanner array driven by a Leverage mechanism. J. Microelectromech. Syst. 2006, 15, 1209–1213. [Google Scholar] [CrossRef]
- Jain, A.; Kopa, A.; Pan, Y.; Fedder, G.K.; Xie, H.K. A two-axis electrothermal mirror for endoscopic optical coherence tomography. IEEE J. Sel. Top. Quantum Electron. 2004, 10, 636–642. [Google Scholar] [CrossRef]
- Jia, K.; Pal, S.; Xie, H. An electrothermal tip-tilt-piston mirror based on folded dual S-shaped bimorphs. J. Microelectromech. Syst. 2009, 18, 1004–1015. [Google Scholar]
- Pal, S.; Xie, H. A curved multimorph based electrothermal mirror with large scan range and low drive voltage. Sens. Actuators A 2011, 70, 156–163. [Google Scholar] [CrossRef]
- Filhol, F.; Defay, E.; Divoux, C.; Zinck, C.; Delaye, M.T. Resonant micro-mirror excited by a thin-film piezoelectric actuator for fast optical beam scanning. Sens. Actuators A Phys. 2005, 123–124, 483–489. [Google Scholar] [CrossRef]
- Sorg, B.S.; Xie, H.; Sun, J.; Wu, L.; Liu, L.S.; Choe, W. 3D in vivo optical coherence tomography based on a low-voltage, large-scan-range 2D MEMS mirror. Opt. Express 2010, 18, 12065–12075. [Google Scholar]
- Lee, C.; Koh, K.H.; Kobayashi, T. A 2D MEMS scanning mirror based on dynamic mixed mode excitation of a piezoelectric PZT thin film S-shaped actuator. Opt. Express 2011, 19, 13812–13824. [Google Scholar]
- Zhang, C.; Zhang, G.F.; You, Z. Piezoresistor Design for Deflection Angles Decoupling Measurement of Two-Dimensional MOEMS Scanning Mirror. In Proceedings of the 7th IEEE International Conference on Nanotechnology, Hong Kong, China, 2–5 August 2007; pp. 150–153. [Google Scholar]
- Zhou, Y.; Wen, Q.; Wen, Z.Y.; Huang, J.; Chang, F. An electromagnetic scanning mirror integrated with blazed grating and angle sensor for a near infrared micro spectrometer. Micromech. Microeng. 2017, 27, 125009. [Google Scholar] [CrossRef]
- Heberer, A.; Gruger, H. Signal processing for a single detector MOEMS based NIR micro spectrometer. Proc. SPIE 2005, 5964, 1–9. [Google Scholar]
- Su, L.L.; Jiang, S.B.; Cheng, M.X.; He, Y.; Xu, B. Bob. Research on the application of NIR spectrometer based on MEMS technology. Chin. J. Spectrosc. Lab. 2011, 28, 494–498. [Google Scholar]
- Wen, Z.Y.; Zhou, Y.; Liu, H.T. The MOMES Scanning Grating Mirror System: China Patent. Patent No. 2,528,363, 23 June 2017. [Google Scholar]
- Nie, Q.Y.; Wen, Z.Y.; Huang, J. A high-performance scanning grating based on tilted (111) silicon wafer for near infrared micro spectrometer application. Microsyst. Technol. 2015, 21, 1749–1755. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drive Voltage (mV) | 100 | 200 | 300 | 400 | 500 | 600 | 700 | 800 | 900 | 1000 |
| Tilt Angle (°) | 1.522 | 2.393 | 3.220 | 4.097 | 5.002 | 5.865 | 6.735 | 7.611 | 8.475 | 9.260 |
| Deviation Angle (°) | 0.027 | 0.025 | 0.027 | 0.040 | 0.035 | 0.040 | 0.045 | 0.042 | 0.050 | 0.048 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Wen, Z.; Li, D.; Huang, J.; Zhou, Y.; Guo, P. A Control and Detecting System of Micro-Near-Infrared Spectrometer Based on a MOEMS Scanning Grating Mirror. Micromachines 2018, 9, 152. https://doi.org/10.3390/mi9040152
Liu H, Wen Z, Li D, Huang J, Zhou Y, Guo P. A Control and Detecting System of Micro-Near-Infrared Spectrometer Based on a MOEMS Scanning Grating Mirror. Micromachines. 2018; 9(4):152. https://doi.org/10.3390/mi9040152
Chicago/Turabian StyleLiu, Haitao, Zhiyu Wen, Dongling Li, Jian Huang, Ying Zhou, and Pengfei Guo. 2018. "A Control and Detecting System of Micro-Near-Infrared Spectrometer Based on a MOEMS Scanning Grating Mirror" Micromachines 9, no. 4: 152. https://doi.org/10.3390/mi9040152
APA StyleLiu, H., Wen, Z., Li, D., Huang, J., Zhou, Y., & Guo, P. (2018). A Control and Detecting System of Micro-Near-Infrared Spectrometer Based on a MOEMS Scanning Grating Mirror. Micromachines, 9(4), 152. https://doi.org/10.3390/mi9040152