Universal Testing Apparatus Implementing Various Repetitive Mechanical Deformations to Evaluate the Reliability of Flexible Electronic Devices


Abstract
1. Introduction
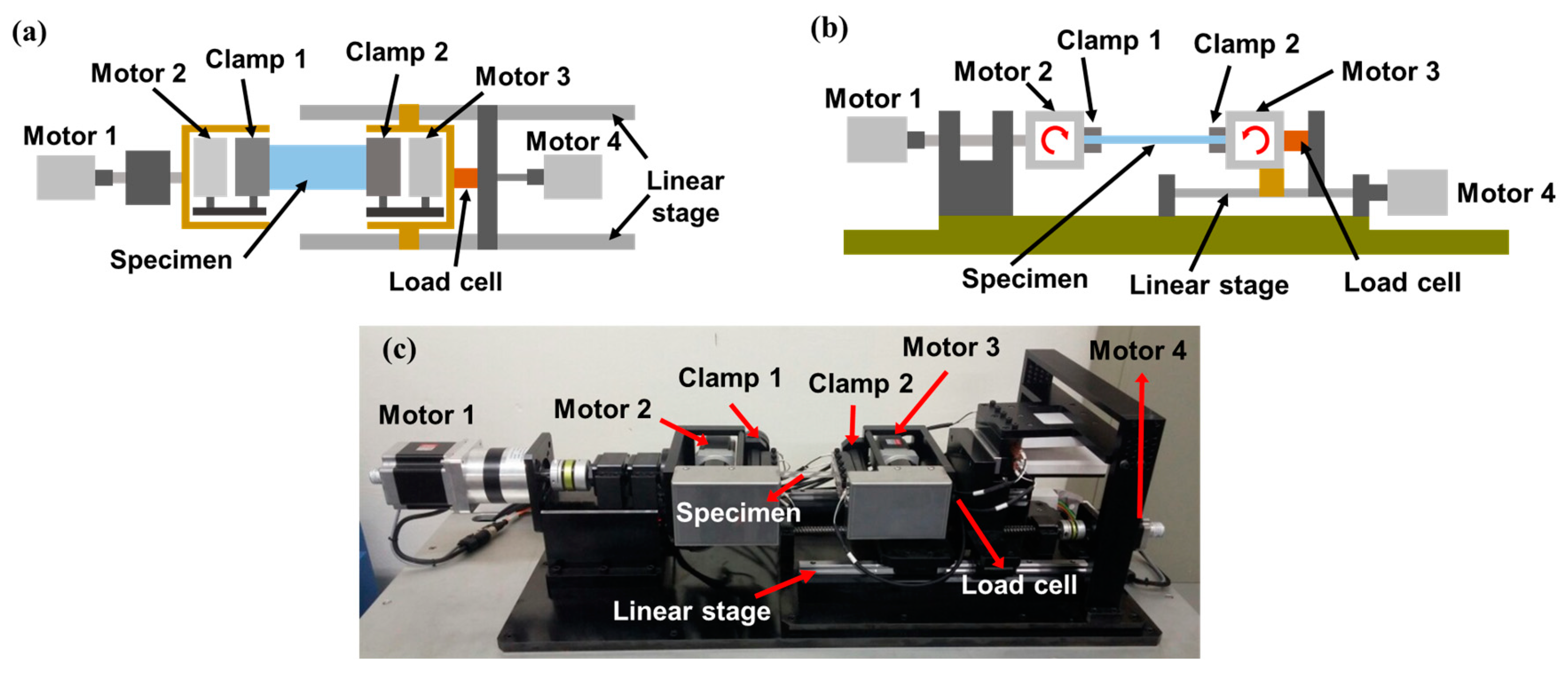
2. Development of Universal Test Apparatus
3. Application of Mechanical Deformations
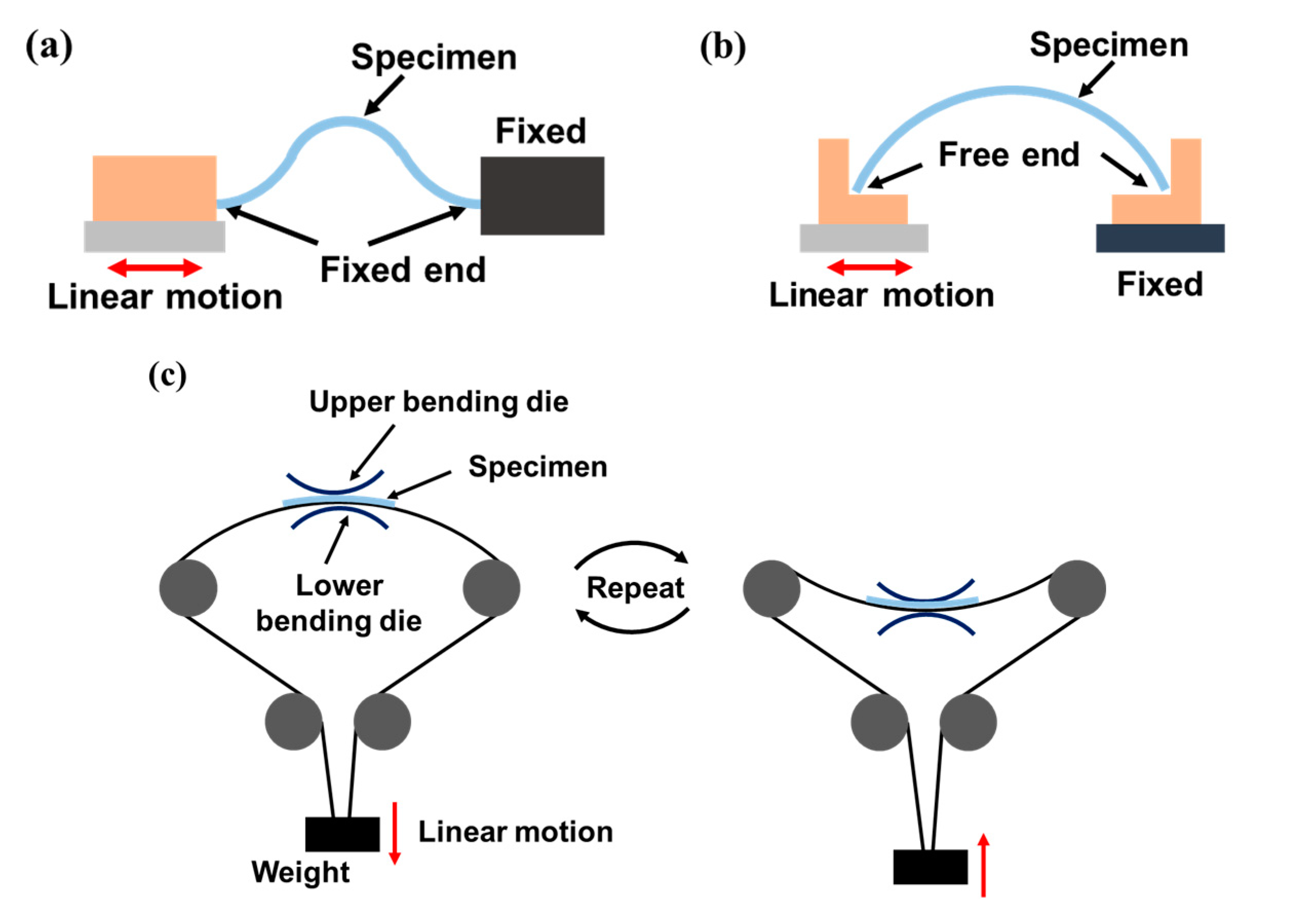
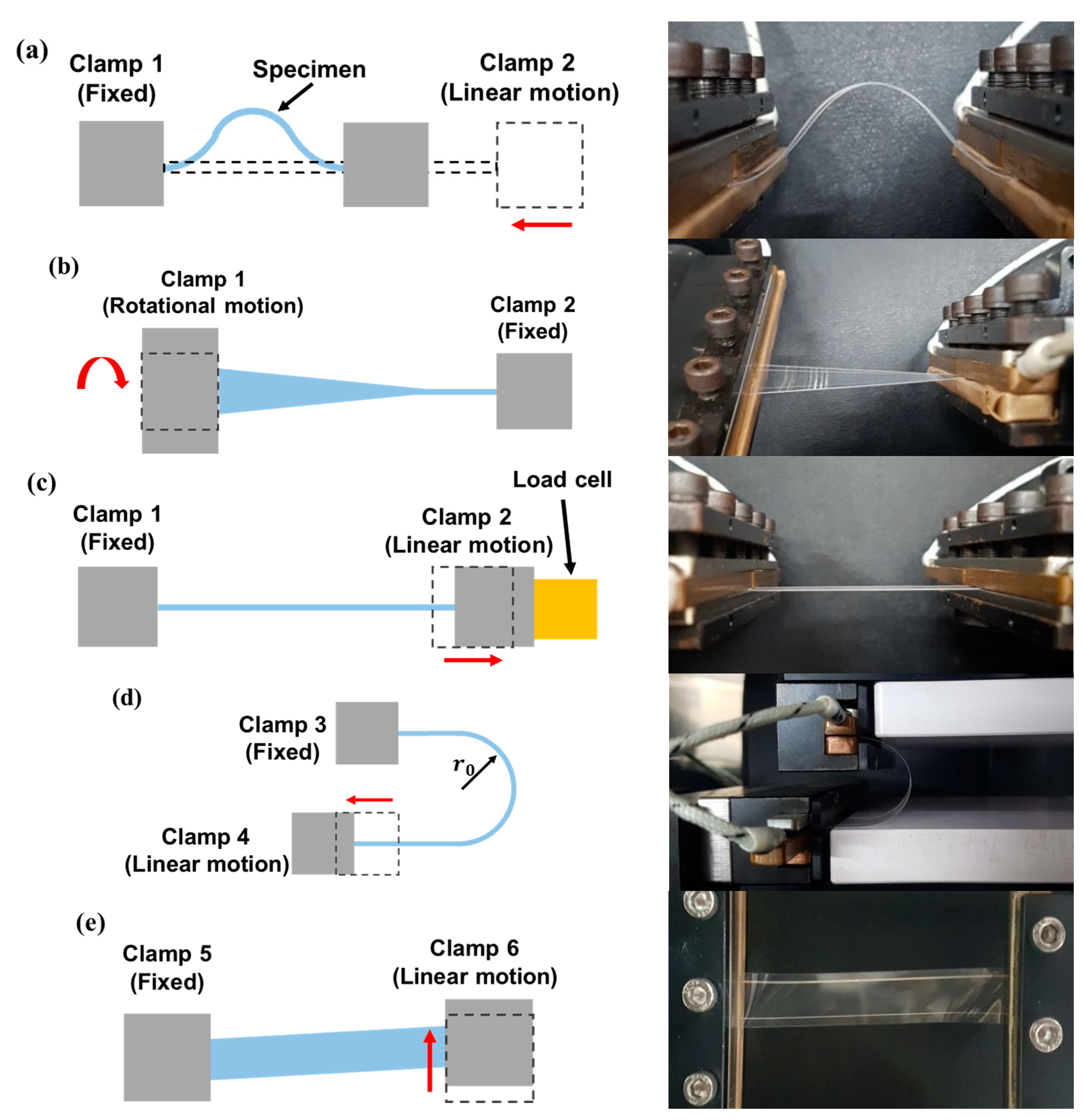
3.1. Application of Conventional Mechanical Deformations
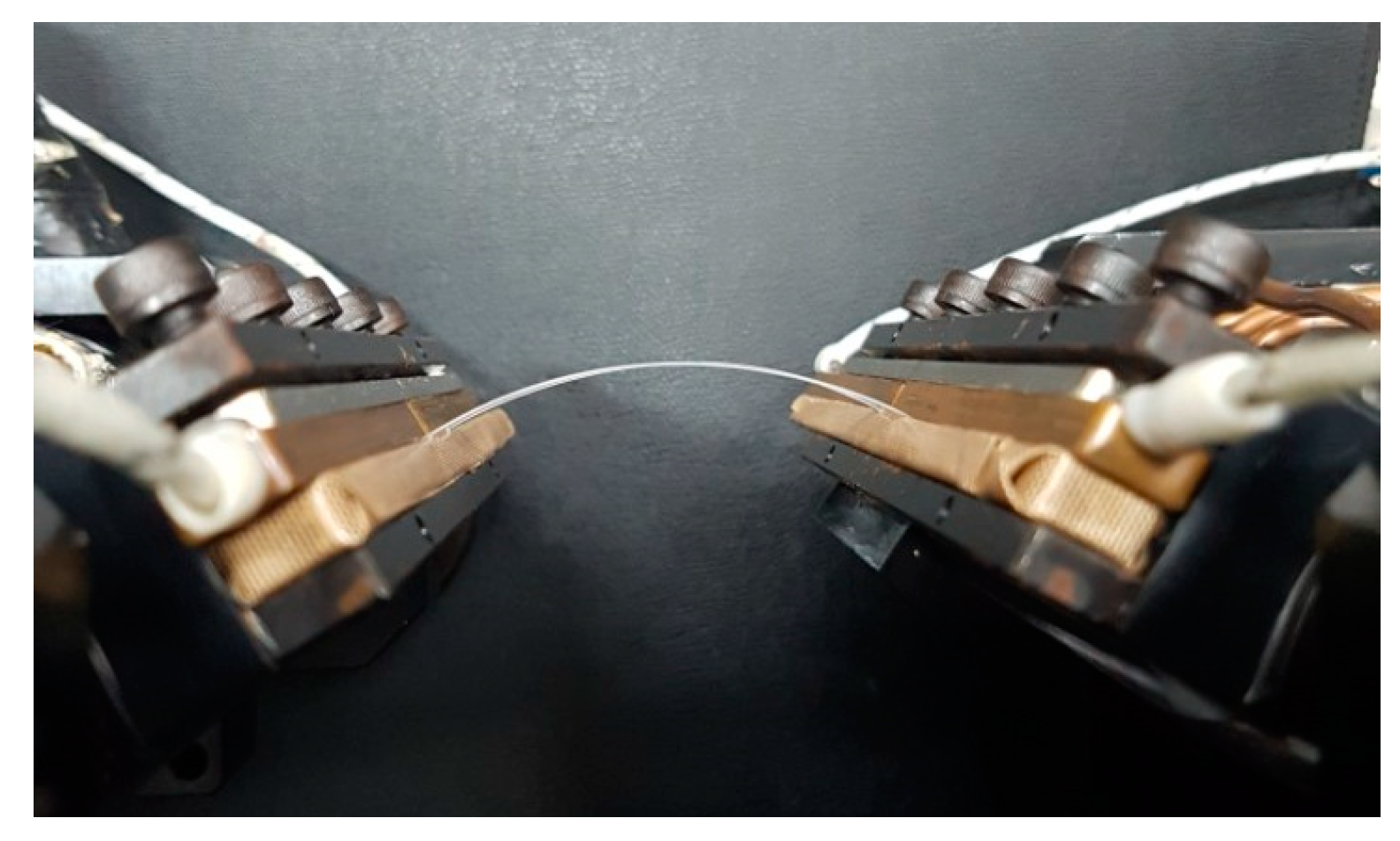
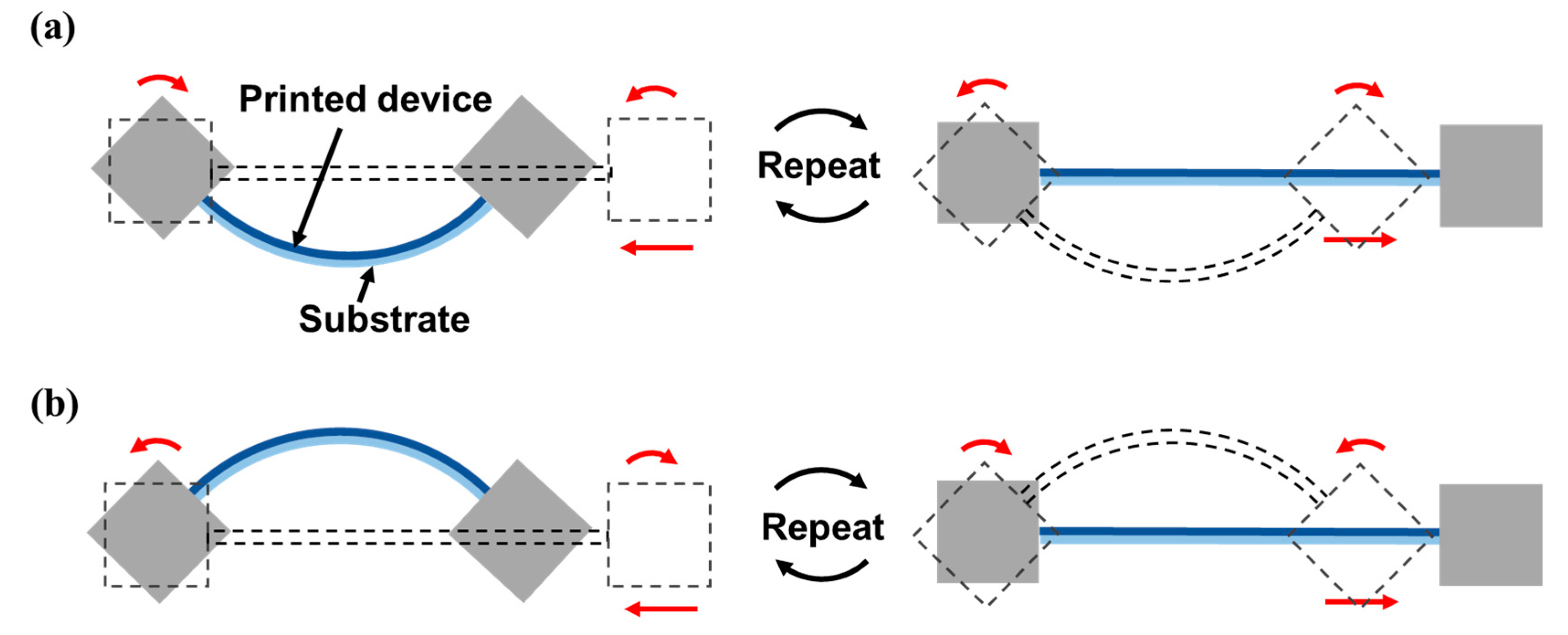
3.2. Application of Novel Bending Deformation
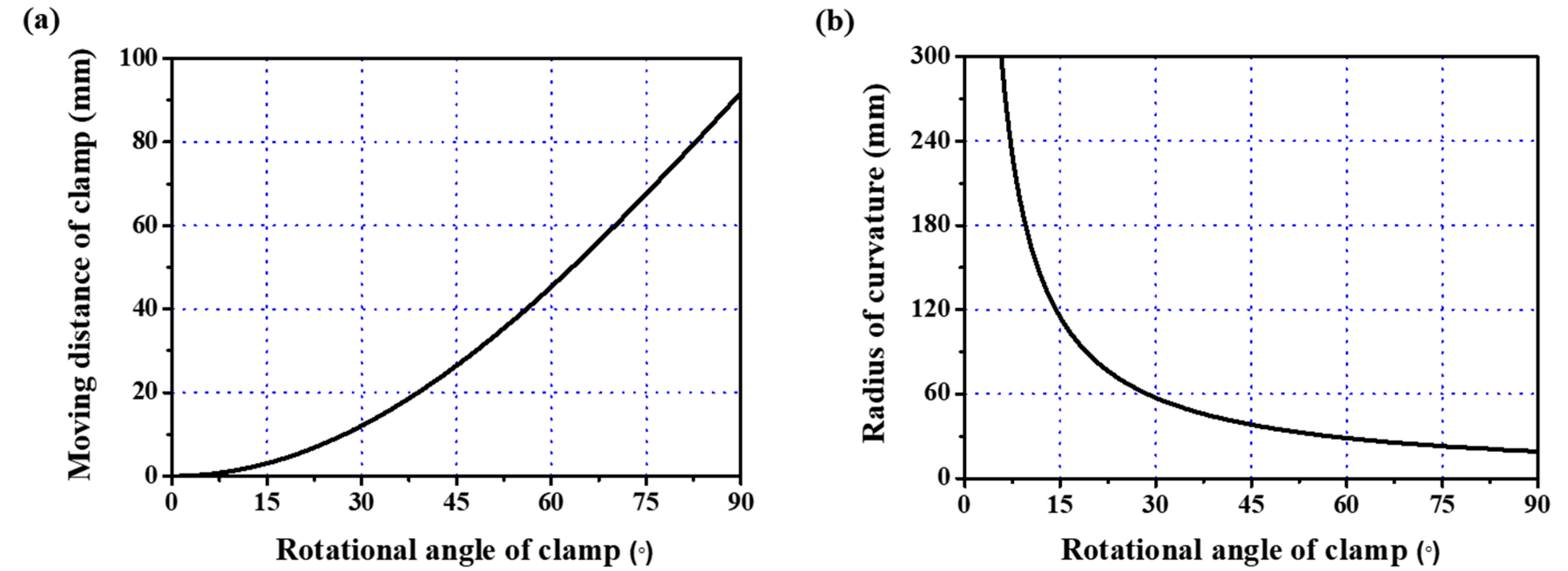
Mathematical Model for Bending a Specimen into an Arc Shape
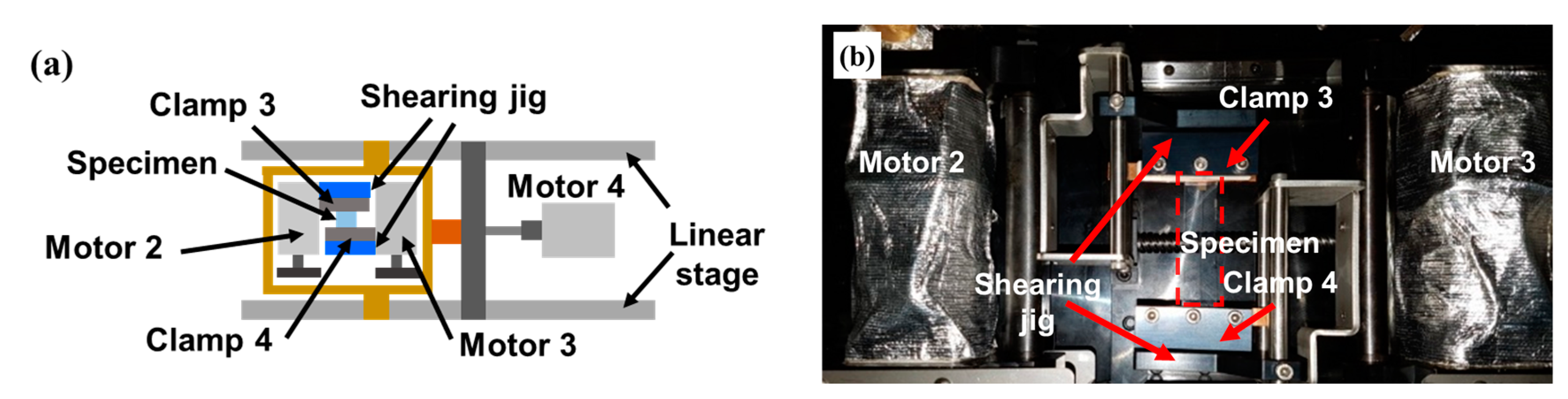
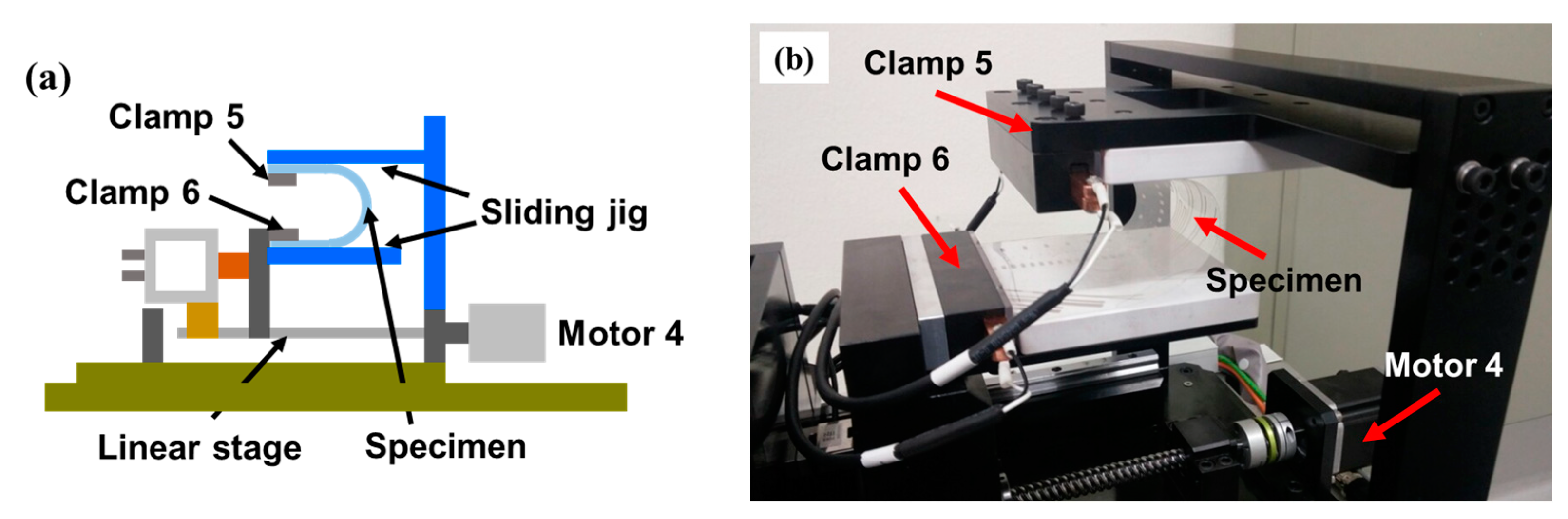
3.3. Application of Complex Deformations
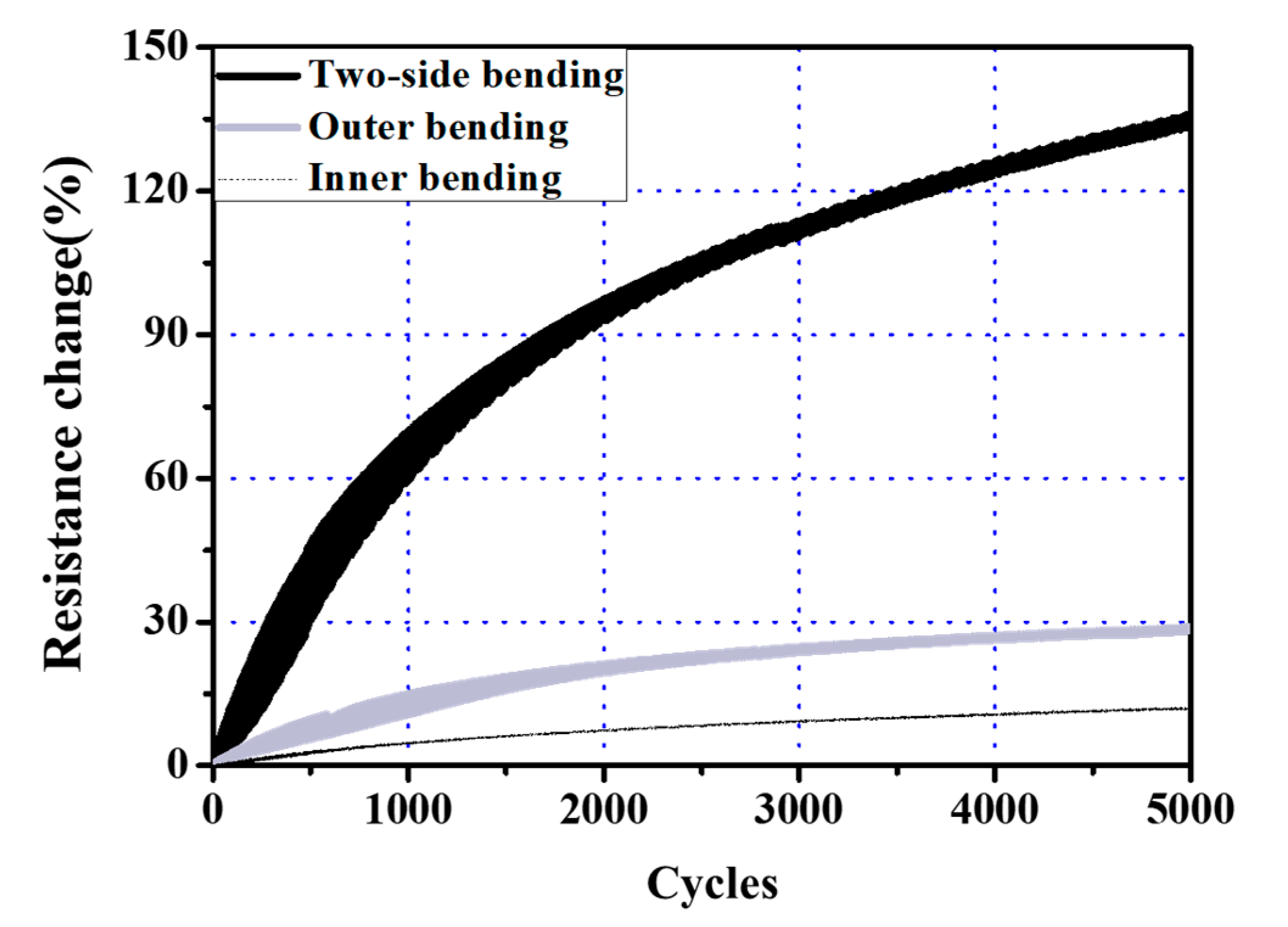
4. Evaluation of the Electrical Reliability of Flexible Printed RFID Tag Antennas under Repetitive Bending Deformation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, C.; Jeon, S.W.; Kim, C.H. Measurement of position accuracy of engraving in plate roller and its effect on register accuracy in roll-to-roll multi-layer printing. Meas. Sci. Technol. 2017, 28, 125002. [Google Scholar] [CrossRef]
- Lee, H.L.; Kim, M.R.; Kim, I.J.; Lee, H.Y. Flexible and stretchable optoelectronic devices using silver nanowires and graphene. Adv. Mater. 2016, 28, 4541–4548. [Google Scholar] [CrossRef] [PubMed]
- Lee, P.; Lee, J.H.; Lee, H.M.; Yeo, J.Y.; Hong, S.J.; Nam, K.H.; Lee, D.J.; Lee, S.S.; Ko, S.H. Highly stretchable and highly conductive metal electrode by very long metal nanowire percolation network. Adv. Mater. 2012, 24, 3326–3332. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.H.; Lee, P.; Lee, H.B.; Hong, S.J.; Lee, I.H.; Yeo, J.Y.; Lee, S.S.; Kim, T.S.; Lee, D.J.; Ko, S.H. Room-temperature nanosoldering of a very long metal nanowire network by conducting-polymer-assisted joining for a flexible touch-panel application. Adv. Funct. Mater. 2013, 23, 4171–4176. [Google Scholar] [CrossRef]
- Park, S.; Vosguerichian, M.; Bao, Z. A review of fabrication and applications of carbon nanotube film-based flexible electronics. Nanoscale 2013, 5, 1727–1752. [Google Scholar] [CrossRef] [PubMed]
- Salmerón, J.F.; Molina-Lopez, F.; Briand, D.; Ruan, J.J.; Rivadeneyra, A.; Carvajal, M.A.; Capitan-Vallvey, L.F.; de Rooij, N.F.; Palma, A.J. Properties and printability of inkjet and screen-printed silver patterns for RFID antennas. J. Electron. Mater. 2014, 43, 604–617. [Google Scholar] [CrossRef]
- Kim, B.J.; Choi, I.S.; Joo, Y.C. Electrical failure and damage analysis of multi-layer metal films on flexible substrate during cyclic bending deformation. In Proceedings of the 18th IEEE International Symposium on the Physical and Failure Analysis of Integrated Circuits, Incheon, Korea, 4–7 July 2011; pp. 1–4. [Google Scholar]
- Schwaiger, R.; Kraft, O. Size effects in the fatigue behavior of thin Ag films. Acta Mater. 2003, 51, 195–206. [Google Scholar] [CrossRef]
- Kim, J.H.; Nizami, A.; Hwangbo, Y.; Jang, B.K.; Lee, H.J.; Woo, C.S.; Hyun, S.M.; Kim, T.S. Tensile testing of ultra-thin films on water surface. Nat. Commun. 2013, 4, 2520. [Google Scholar] [CrossRef] [PubMed]
- Saggio, G.; Riillo, F.; Sbernini, L.; Quitadamo, L.R. Resistive flex sensors: A survey. Smart. Mater. Struct. 2016, 25, 013001. [Google Scholar] [CrossRef]
- Harris, K.D.; Elias, A.L.; Chung, H.-J. Flexible electronics under strain: a review of mechanical characterizaion and durability enhancement strategies. J. Mater. Sci. 2016, 51, 2771–2805. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Bao, Z. Stretchable and ultraflexible organic electronics. MRS Bull. 2017, 42, 93–97. [Google Scholar] [CrossRef]
- Park, J.H.; Han, S.Y.; Kim, D.K.; You, B.K.; Joe, D.J.; Hong, S.J.; Seo, J.M.; Kwon, J.H.; Jeong, C.K.; Park, H.J.; et al. Plasmonic-tuned flash Cu nanowelding with ultrafast photochemical-reducing and interlocking on flexible plastics. Adv. Funct. Mater. 2017, 27, 1701138. [Google Scholar] [CrossRef]
- Osypiuk, P.; Dziedzic, A.; Steplewski, W. Influence of mechanical exposures on electrical properties of thin and thick-film flexible resistors and conductors. Solder. Surf. Mount Technol. 2016, 28, 33–38. [Google Scholar] [CrossRef]
- Finn, M., III; Martensa, C.J.; Zaretskia, A.V.; Rotha, B.; Søndergaard, R.R.; Krebsb, F.K.; Lipomi, D.J. Mechanical stability of roll-to-roll printed solar cells under cyclic bending and torsion. Sol. Energy Mater. Sol. Cells 2018, 174, 7–15. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Tee, B.C.-K.; Vosgueritchian, M.; Bao, Z. Stretchable organic solar cells. Adv. Mater. 2011, 23, 1771–1775. [Google Scholar] [CrossRef] [PubMed]
- Printz, A.D.; Chiang, A.S.-C.; Savagatrup, S.; Lipomi, D.J. Fatigue in organic semiconductors: Spectroscopic evolution of microstructure due to cyclic loading in poly(3-heptylthiophene). Synth. Met. 2016, 217, 144–151. [Google Scholar] [CrossRef]
- O’Connor, T.F.; Zaretski, A.V.; Savagatrup, S.; Printz, A.D.; Wilkes, C.D.; Diaz, M.I.; Sawyer, E.J.; Lipomi, D.J. Wearable organic solar cells with high cyclic bending stability: Materials selection criteria. Sol. Energy Mater. Sol. Cells 2016, 144, 438–444. [Google Scholar] [CrossRef]
- Plovie, B.; Bossuyt, F.; Vanfleteren, J. Stretchability—The metric for stretchable electrical interconnects. Micromachines 2018, 9, 382. [Google Scholar] [CrossRef]
- Dziedzic, A.; Osypiuk, P.; Steplewski, W. Stability of electrical properties for mechanically exposed thick- and thin-film resistors on flexible substrates. Solder. Surf. Mount Technol. 2017, 29, 54–58. [Google Scholar] [CrossRef]
- Lee, S.M.; Kwon, J.Y.; Yoon, D.S.; Cho, H.D.; You, J.H.; Kang, Y.T.; Choi, D.H.; Hwang, W.B. Bendability optimization of flexible optical nanoelectronics via neutral axis engineering. Nanoscale Res. Lett. 2012, 7, 256. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.S.; Lee, I.H.; Kim, D.Y.; Yu, Y.Y.; Jung, H.Y.; Kwon, S.Y.; Park, W.S.; Kim, T.S. Controlled multiple neutral planes by low elastic modulus adhesive for flexible organic photovoltaics. Nanotechnology 2017, 28, 194002. [Google Scholar] [CrossRef] [PubMed]
- Li, T.C.; Han, C.F.; Chen, K.T.; Lin, J.F. Fatigue life study of ITO/PET specimens in terms of electrical resistance and stress/strain via cyclic bending tests. J. Disp. Technol. 2013, 9, 577–585. [Google Scholar] [CrossRef]
- Yang, M.; Chon, M.W.; Kim, J.H.; Lee, S.H.; Jo, J.D.; Yeo, J.Y.; Ko, S.H.; Choa, S.H. Mechanical and environmental durability of roll-to-roll printed silver nanoparticle film using a rapid laser annealing process for flexible electronics. Microelectron. Reliab. 2014, 54, 2871–2880. [Google Scholar] [CrossRef]
- Park, S.I.; Ahn, J.H.; Feng, X.; Wang, S.; Huang, Y.; Rogers, J.A. Theoretical and experimental studies of bending of inorganic electronic materials on plastic substrates. Adv. Funct. Mater. 2008, 18, 2673–2684. [Google Scholar] [CrossRef]
- Park, S.J.; Wang, G.; Cho, B.J.; Kim, Y.H.; Song, S.H.; Ji, Y.S.; Yoon, M.H.; Lee, T.H. Flexible molecular-scale electronic devices. Nat. Nanotechnol. 2012, 7, 438. [Google Scholar] [CrossRef] [PubMed]
- Hamasha, M.M.; Alzoubi, K.; Lu, S.; Desu, S.B. Durability study on sputtered indium tin oxide thin film on poly ethylene terephthalate substrate. Thin Solid Films 2011, 519, 6033–6038. [Google Scholar] [CrossRef]
- Hamasha, M.M.; Alzoubi, K.; Switzer, J.C.; Lu, S.; Poliks, M.D.; Westgate, C.R. Reliability of sputtered aluminum thin film on flexible substrate under high cyclic bending fatigue conditions. IEEE Trans. Compon. Packag. Manuf. Technol. 2012, 2, 2007–2016. [Google Scholar] [CrossRef]
- Mohammed, D.W.; Ameen, R.B.; Sierros, K.A.; Bowen, J.; Kukureka, S.N. Twisting fatigue in multilayer films of Ag-alloy with indium tin oxide on polyethylene terephthalate for flexible electronics devices. Thin Solid Films 2018, 645, 241–252. [Google Scholar] [CrossRef]
- Jiang, C.; Hu, D.; Lu, Y. Digital micromirror device (DMD)-based high-cycle torsional fatigue testing micromachine for 1D nanomaterials. Micromachines 2016, 7, 49. [Google Scholar] [CrossRef]
- Schmied, B.; Günther, J.; Klatt, C.; Kober, H.; Raemaekers, E. STELLA-stretchable electronics for large area applications—A new technology for smart textiles. Adv. Sci. Technol. 2008, 60, 67–73. [Google Scholar] [CrossRef]
- Kim, S.H.; Won, S.J.; Sim, G.D.; Park, I.K.; Lee, S.B. Tensile characteristics of metal nanoparticle films on flexible polymer substrates for printed electronics applications. Nanotechnology 2013, 24, 085701. [Google Scholar] [CrossRef] [PubMed]
- Kim, B.J.; Lee, J.H.; Yang, T.Y.; Haas, T.; Gruber, P.; Choi, I.S.; Kraft, O.; Joo, Y.C. Effect of film thickness on the stretchability and fatigue resistance of Cu films on polymer substrates. J. Mater. Res. 2014, 29, 2827–2834. [Google Scholar] [CrossRef]
- Kim, B.J.; Lee, J.H.; Joo, Y.C. Effect of cyclic outer and inner bending on the fatigue behavior of a multi-layer metal film on a polymer substrate. Jpn. J. Appl. Phys. 2016, 55, 06JF01. [Google Scholar] [CrossRef]
- Beer, F.P.; Johnston, E.R.; Dowolf, J.T.; Mazurek, D.F. Deflection of beams. In Mechanics of Materials, 5th ed.; McGraw-Hill Education: New York, NY, USA, 2015. [Google Scholar]
- Kim, D.J.; Kim, H.J.; Seo, K.W.; Kim, K.H.; Kim, T.W.; Kim, H.K. Indium-free, highly transparent, flexible Cu2O/Cu/Cu2O mesh electrodes for flexible touch screen panels. Sci. Rep. 2015, 5, 16838. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Initial length of the specimen (, mm) | 31.0 |
| Rotational angle of the clamps (, rad) | |
| Moving distance of Clamp 2 (, mm) | 12.1 |
| Radius of curvature (, mm) | 29.6 |
| Motion frequency (Hz) | 0.4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, C.; Kim, C.H. Universal Testing Apparatus Implementing Various Repetitive Mechanical Deformations to Evaluate the Reliability of Flexible Electronic Devices. Micromachines 2018, 9, 492. https://doi.org/10.3390/mi9100492
Kim C, Kim CH. Universal Testing Apparatus Implementing Various Repetitive Mechanical Deformations to Evaluate the Reliability of Flexible Electronic Devices. Micromachines. 2018; 9(10):492. https://doi.org/10.3390/mi9100492
Chicago/Turabian StyleKim, Cheol, and Chung Hwan Kim. 2018. "Universal Testing Apparatus Implementing Various Repetitive Mechanical Deformations to Evaluate the Reliability of Flexible Electronic Devices" Micromachines 9, no. 10: 492. https://doi.org/10.3390/mi9100492
APA StyleKim, C., & Kim, C. H. (2018). Universal Testing Apparatus Implementing Various Repetitive Mechanical Deformations to Evaluate the Reliability of Flexible Electronic Devices. Micromachines, 9(10), 492. https://doi.org/10.3390/mi9100492