
Dealing with Magnetic Disturbances in Human Motion Capture: A Survey of Techniques


Abstract
:
1. Introduction
2. Background
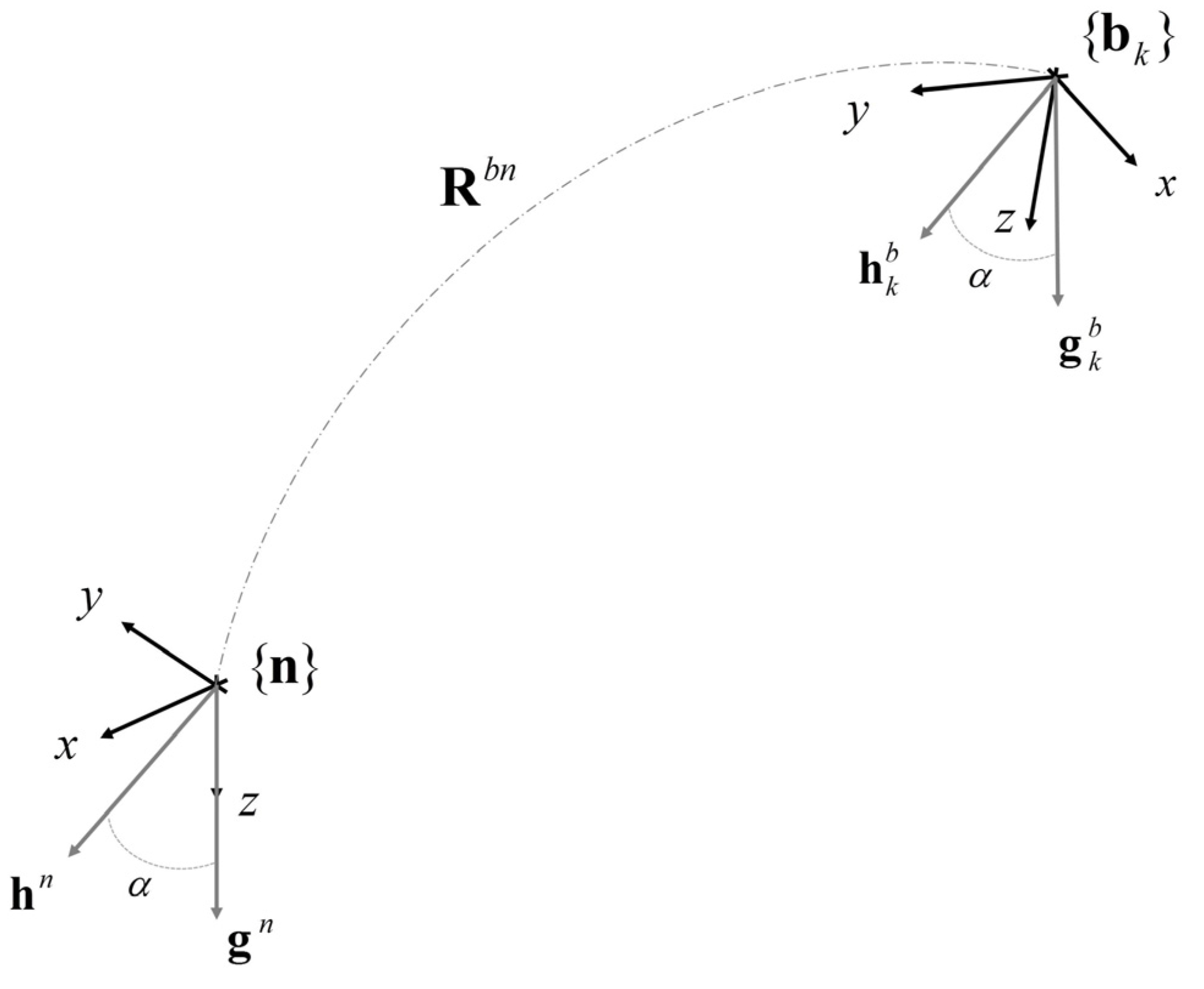
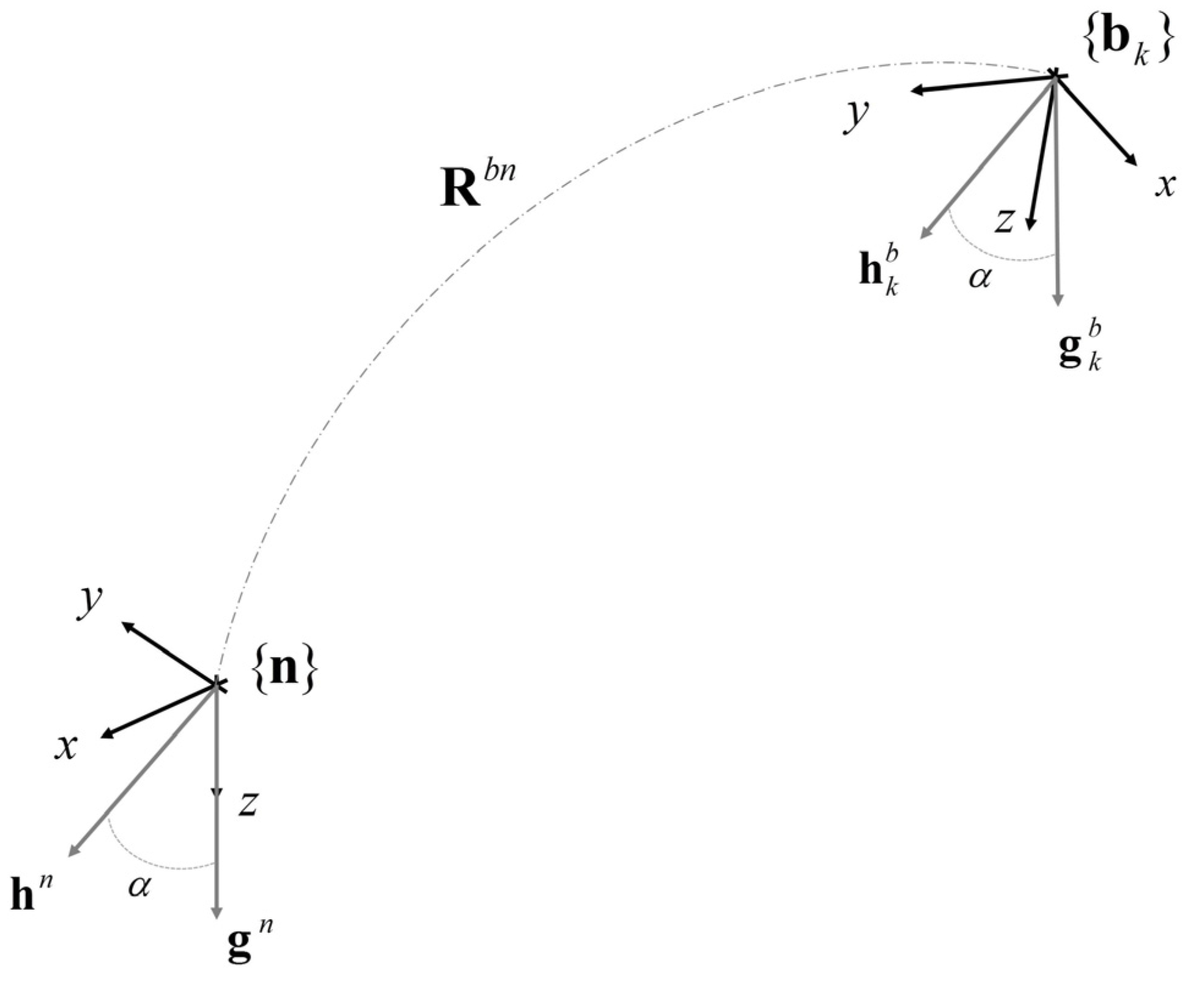
2.1. Rigid Body Orientation
2.2. Orientation Estimation: Single-Frame Approaches
2.3. Kalman Filtering: Basics
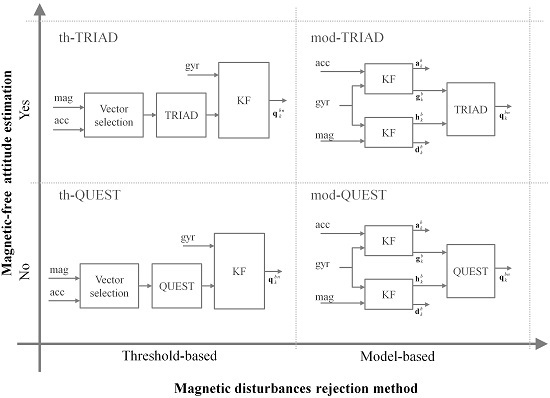
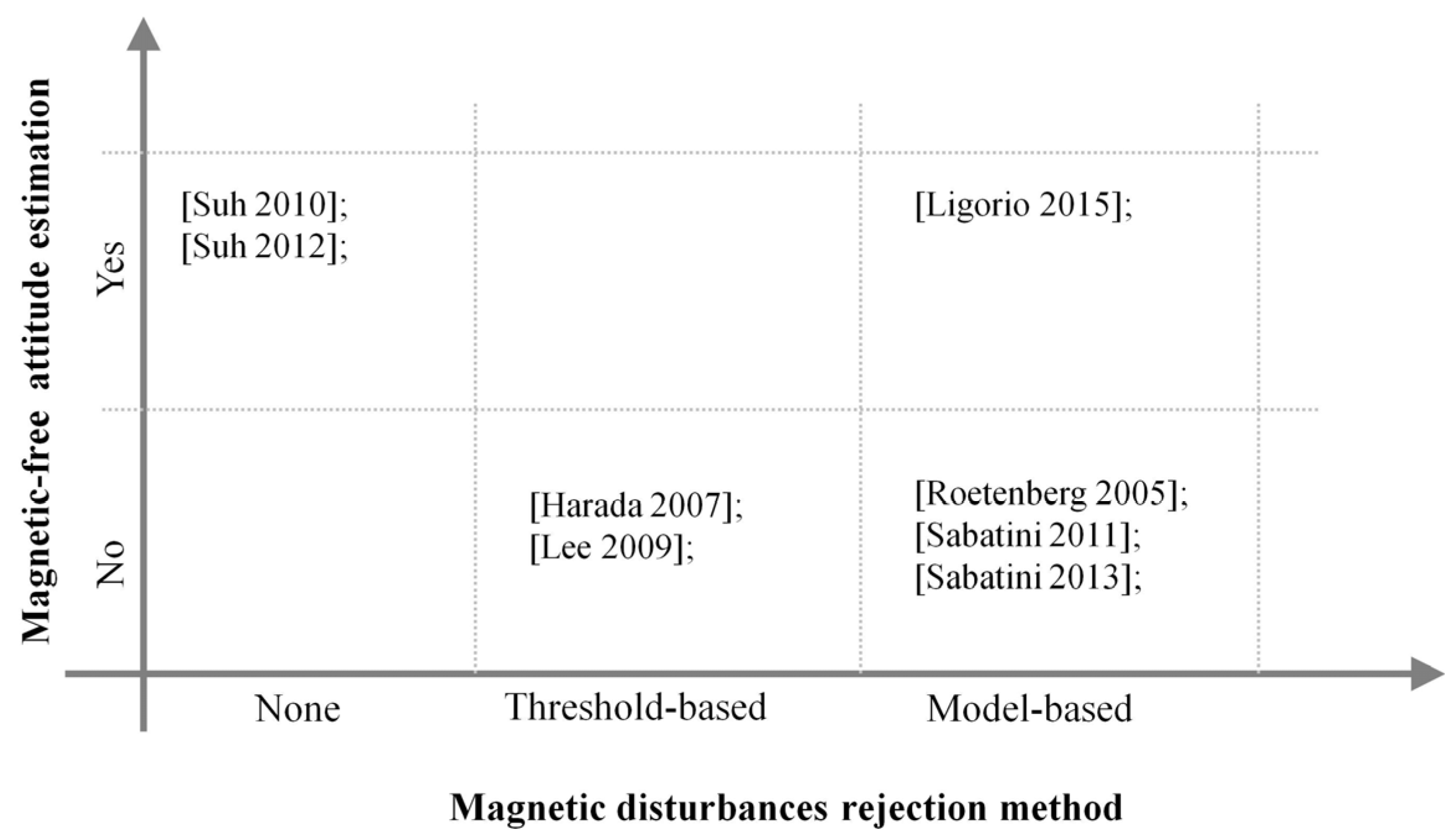
3. Orientation Estimation: How to Deal with the Problem of Magnetic Disturbances
3.1. Magnetic-Free Attitude Estimation
3.2. Threshold-Based Approaches for Magnetic Disturbance Rejection
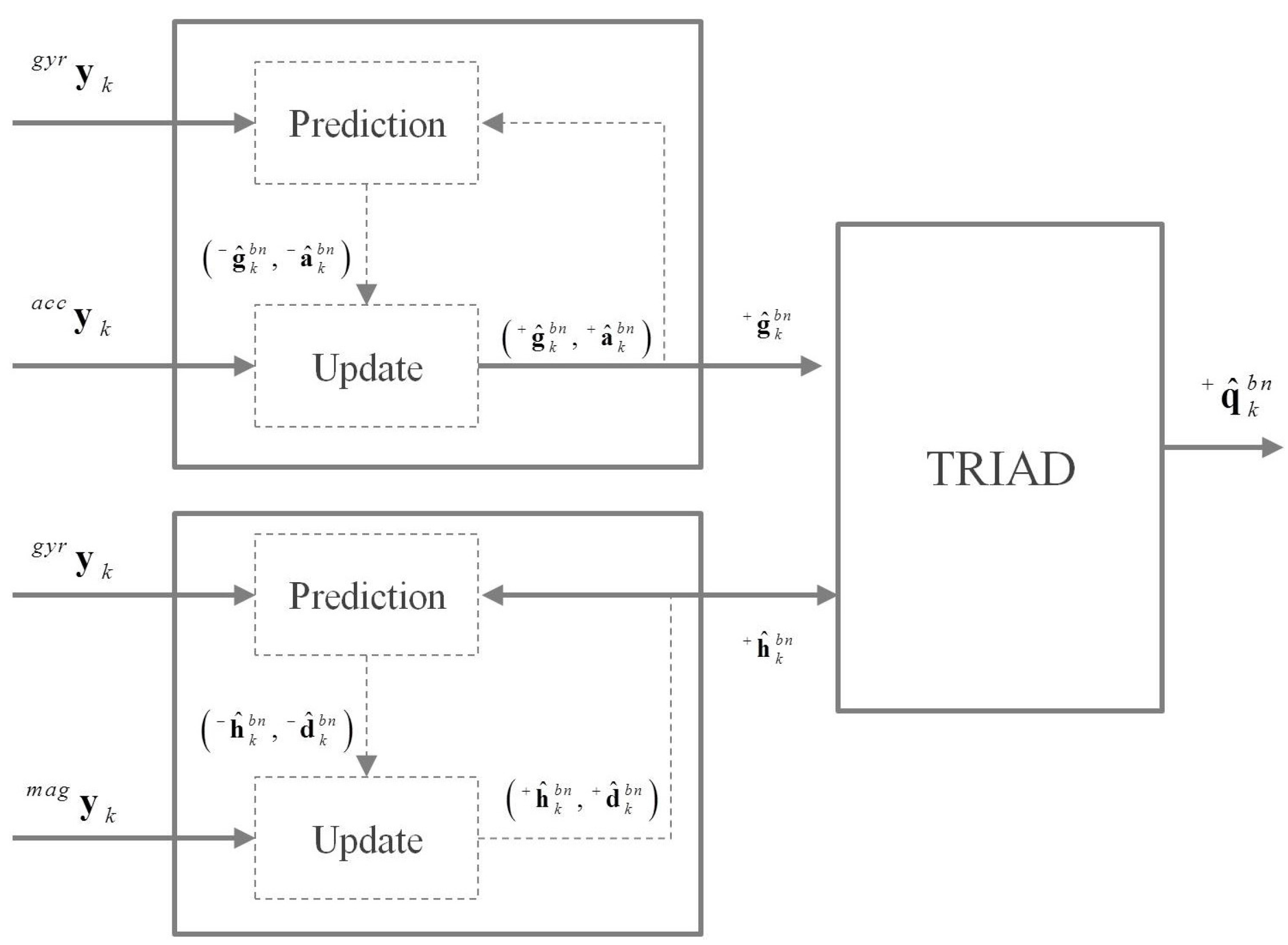
3.3. Model-Based Approaches for Magnetic Disturbance Rejection
4. An Experimental Proof of Concept
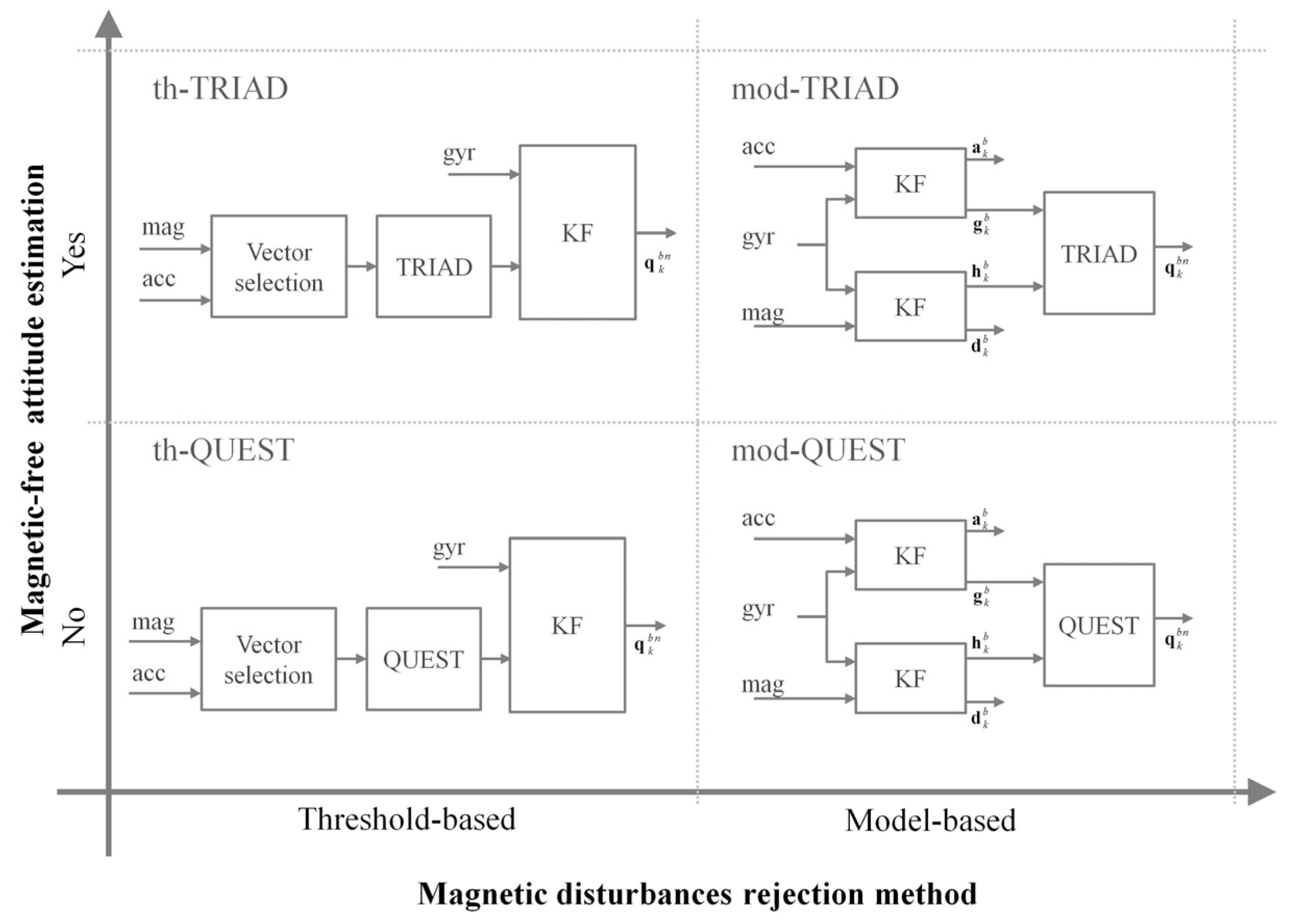
4.1. Considered Orientation Estimation Methods
4.2. Experimental Setup
5. Results and Discussions
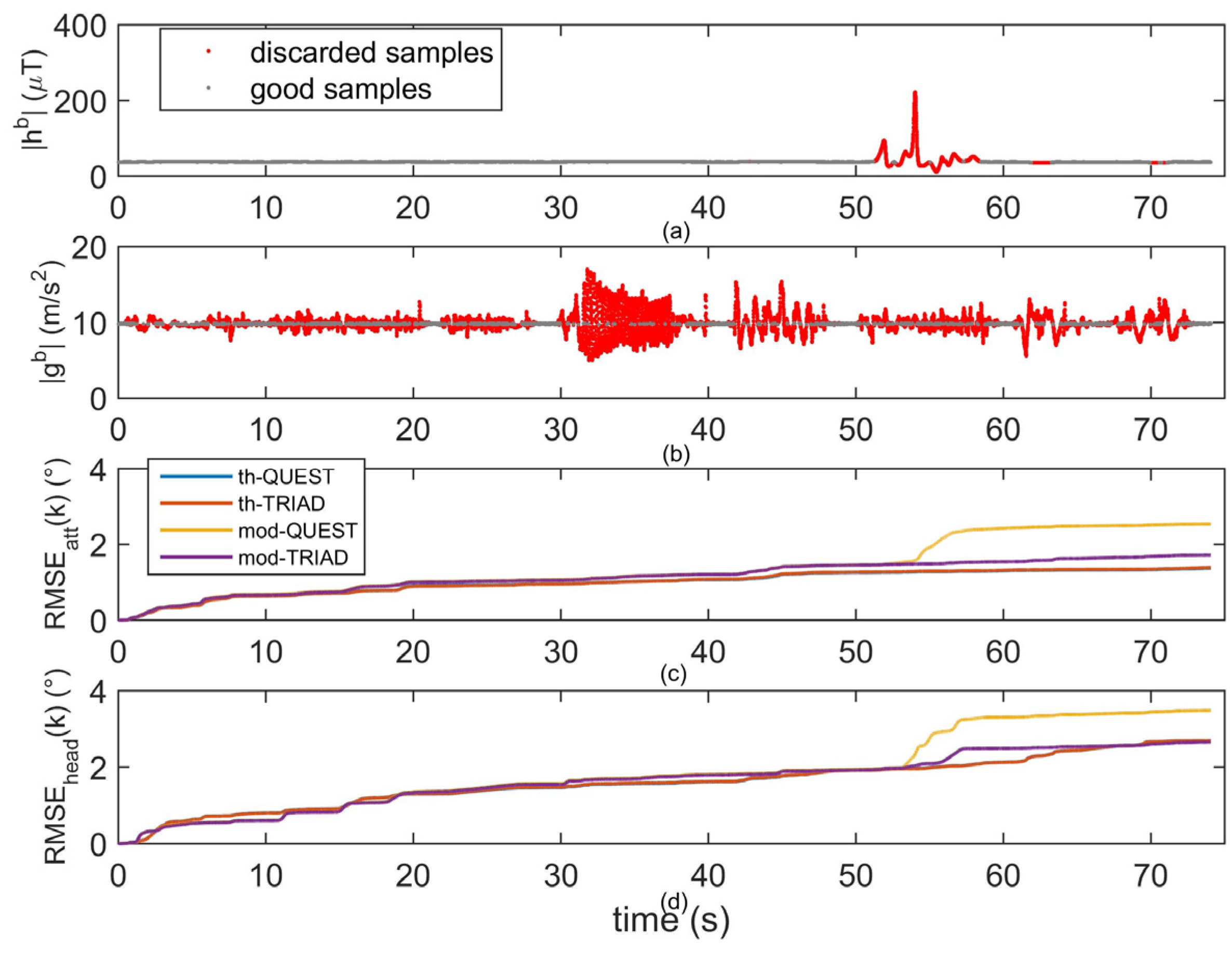
5.1. Orientation Estimation Results: Manual Routines Task
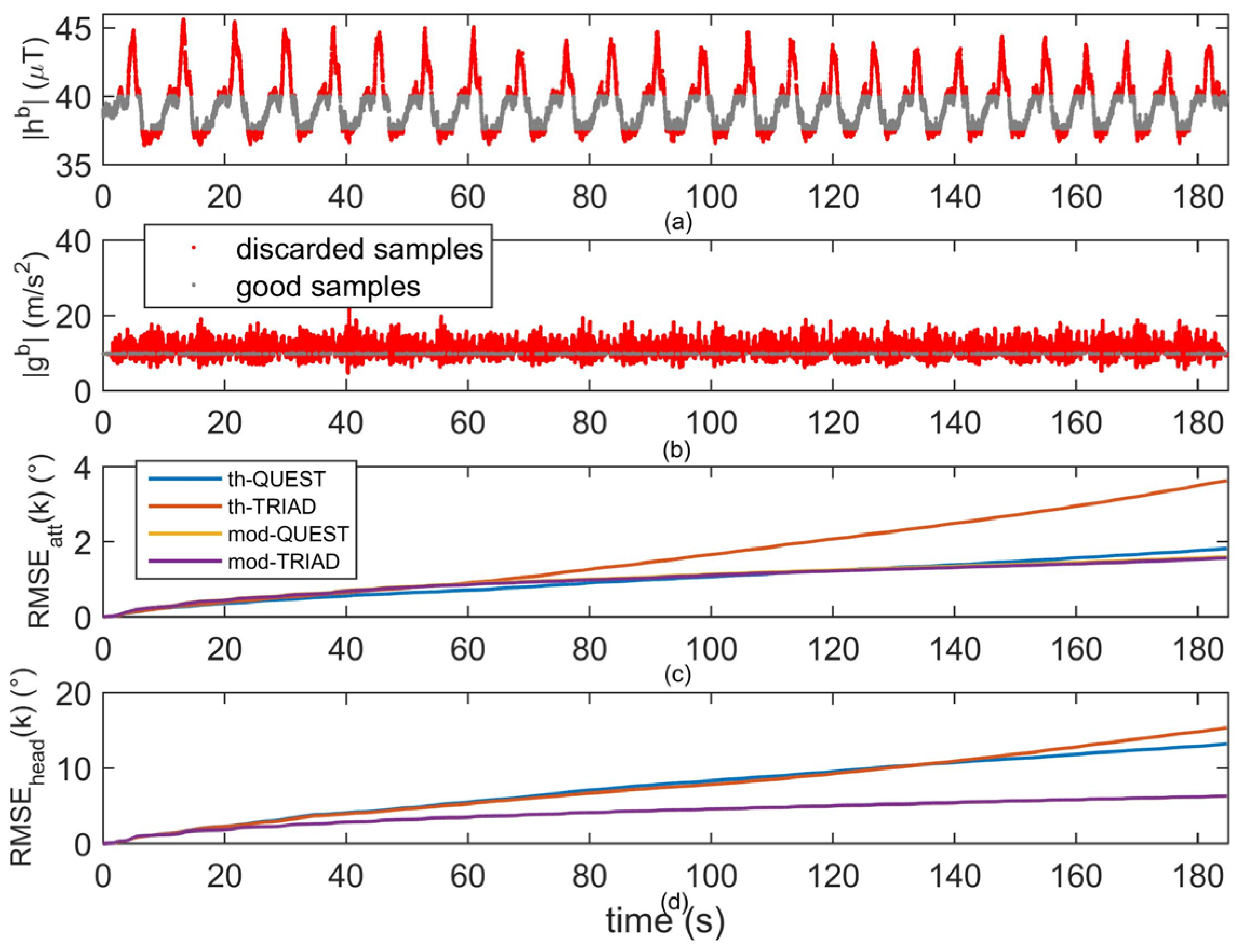
5.2. Orientation Estimation Results: Gait Task
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
A.1. Selected Threshold-Based Method


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| thacc | thmag | thα |
|---|---|---|
| 0.08 m/s2 | 1.20 µT | 5° |
A.2. Selected Model-Based Method
References
- Wiltschko, W.; Wiltschko, R. Magnetic compass of European robins. Science 1972, 176, 62–64. [Google Scholar] [CrossRef] [PubMed]
- Lohmann, K.J.; Shaun, D.C.; Susan, A.D.; Catherine, M.F.L. Regional magnetic fields as navigational markers for sea turtles. Science 2001, 294, 364–366. [Google Scholar] [CrossRef] [PubMed]
- Alerstam, T. Animal behaviour: The lobster navigators. Nature 2003, 421, 27–28. [Google Scholar] [CrossRef] [PubMed]
- Kreutz, B.M. Mediterranean contributions to the medieval Mariner’s Compass. Technol. Cult. 1973, 14, 367–383. [Google Scholar] [CrossRef]
- Needham, J.; Wang, L.; Lu, G.D. Science and Civilisation in China; Cambridge University Press: Cambridge, UK, 1963. [Google Scholar]
- Caruso, M.J. Applications of magnetic sensors for low cost compass systems. In Proceeding of IEEE Position Location and Navigation Symposium, San Diego, CA, USA, 13–16 March 2000.
- Scaramuzza, D.; Achtelik, M.C.; Doitsidis, L.; Friedrich, F.; Kosmatopoulos, E.; Martinelli, A.; Achtelik, M.W.; Chli, M.; Chatzichristofis, S.; Kneip, L.; et al. Vision-controlled micro flying robots: from system design to autonomous navigation and mapping in GPS-denied environments. IEEE Robot. Autom. Mag. 2014, 21, 26–40. [Google Scholar] [CrossRef]
- Brown, A.K. GPS/INS uses low-cost MEMS IMU. IEEE Trans. Aerosp. Electron. Syst. 2005, 20, 3–10. [Google Scholar] [CrossRef]
- Ligorio, G.; Sabatini, A.M. A linear kalman filtering-based approach for 3D orientation estimation from magnetic/inertial sensors. In Proceeding of IEEE Multisensor Fusion and Integration for Intelligent Systems, San Diego, CA, USA, 14–16 September 2015.
- Yun, X.; Bachmann, E.R. Design, implementation, and experimental results of a quaternion-based Kalman Filter for human body motion tracking. IEEE Trans. Robot. 2006, 22, 1216–1227. [Google Scholar] [CrossRef]
- Luinge, H.J.; Veltink, P.H.; Baten, C.T. Ambulatory measurement of arm orientation. J. Biomech. 2007, 40, 78–85. [Google Scholar] [CrossRef] [PubMed]
- Welch, G.; Foxlin, E. Motion tracking: no silver bullet, but a respectable arsenal. IEEE Comput. Graph. Appl. 2002, 22, 24–38. [Google Scholar] [CrossRef]
- Bergamini, E.; Ligorio, G.; Summa, A.; Vannozzi, G.; Cappozzo, A.; Maria, A. Estimating orientation using magnetic and inertial sensors and different sensor fusion approaches: Accuracy assessment in manual and locomotion tasks. Sensors 2014, 14, 18625–18649. [Google Scholar] [CrossRef] [PubMed]
- Pasciuto, I.; Ligorio, G.; Summa, A.; Vannozzi, G.; Cappozzo, A.; Sabatini, A.M. How angular velocity features and different gyroscope noise types interact and determine orientation estimation accuracy. Sensors 2015, 15, 23983. [Google Scholar] [CrossRef] [PubMed]
- Ligorio, G.; Sabatini, A.M. A novel kalman filter for human motion tracking with an inertial-based dynamic inclinometer. IEEE Trans. Biomed. Eng. 2015, 62, 2033–2043. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.K.; Park, E.J.; Robinovitch, S.N. Estimation of attitude and external acceleration using inertial sensor measurement during various dynamic conditions. IEEE Trans. Instrum. Meas. 2012, 61, 2262–2273. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, A.M. Estimating three-dimensional orientation of human body parts by inertial/magnetic sensing. Sensors 2011, 11, 1489–1525. [Google Scholar] [CrossRef] [PubMed]
- National Center for Environmental Information. Available online: http://ngdc.noaa.gov/ (accessed on 2 March 2016).
- Sabatini, A.M. Kalman-filter-based orientation determination using inertial/magnetic sensors: Observability analysis and performance evaluation. Sensors 2011, 11, 9182–9206. [Google Scholar] [CrossRef] [PubMed]
- Bachmann, E.R.; Yun, X.; Brumfield, A. An investigation of the effects of magnetic variations on inertial magnetic orientation sensors. IEEE Robot. Autom. Mag. 2007, 14, 76–87. [Google Scholar] [CrossRef]
- De Vries, W.H.K.; Veegera, H.E.J.; Baten, C.T.M.; van der Helma, F.C.T. Magnetic distortion in motion labs, implications for validating inertial magnetic sensors. Gait Posture 2009, 29, 535–541. [Google Scholar] [CrossRef] [PubMed]
- Angermann, M.; Frassl, M.; Doniec, M.; Julian, B.J.; Robertson, P. Characterization of the indoor magnetic field for applications in localization and mapping. In Proceeding of Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012.
- Gozick, B.; Subbu, K.P.; Dantu, R.; Maeshiro, T. Magnetic maps for indoor navigation. IEEE Trans. Instrum. Meas. 2011, 60, 3883–3891. [Google Scholar] [CrossRef]
- Frassl, M.; Angermann, M.; Lichtenstern, M.; Robertson, P.; Julian, B.J.; Doniec, M. Magnetic maps of indoor environments for precise localization of legged and non-legged locomotion. In Proceeding of Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013.
- Ligorio, G.; Sabatini, A.M. A particle filter for 2D indoor localization relying on magnetic disturbances and magnetic-inertial measurement units. In Proceeding of IEEE Sensors Applications Symposium, 2015, Catania, Italy, 20 April 2016.
- Shuster, M.D. A survey of attitude representations. Navigation 1993, 9, 439–517. [Google Scholar]
- Wahba, G. A least squares estimate of satellite attitude. SIAM Rev. 1965, 7, 409. [Google Scholar] [CrossRef]
- Shuster, M.D.; Oh, S. Three-axis attitude determination from vector observations. J. Guid. Control Dyn. 1981, 4, 70–77. [Google Scholar] [CrossRef]
- Markley, F.L. Attitude determination using vector observations and the singular value decomposition. J. Astronaut. Sci. 1988, 36, 245–258. [Google Scholar]
- Yun, X.; Bachmann, E.R.; McGhee, R.B. A simplified quaternion-based algorithm for orientation estimation from earth gravity and magnetic field measurements. IEEE Trans. Instrum. Meas. 2008, 57, 638–650. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Brown, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering: With MATLAB Exercises and Solutions; John Wiley & Sons: Hoboken, NJ, USA, 1997. [Google Scholar]
- Sabatini, A.M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Biomed. Eng. Trans. 2006, 53, 1346–1356. [Google Scholar] [CrossRef] [PubMed]
- Choukroun, D.; Bar-Itzhack, I.Y.; Oshman, Y. Novel quaternion Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 174–190. [Google Scholar] [CrossRef]
- Lee, J.K.; Park, E.J. Minimum-order kalman filter with vector selector for accurate estimation of human body orientation. IEEE Trans. Robot. 2009, 25, 1196–1201. [Google Scholar]
- Suh, Y.S. Orientation estimation using a quaternion-based indirect Kalman filter with adaptive estimation of external acceleration. IEEE Trans. Instrum. Meas. 2010, 59, 3296–3305. [Google Scholar] [CrossRef]
- Suh, Y.S.; Ro, Y.S.; Kang, H.J. Quaternion-based indirect kalman filter discarding pitch and roll information contained in magnetic sensors. IEEE Trans. Instrum. Meas. 2012, 61, 1786–1792. [Google Scholar] [CrossRef]
- Harada, T.; Mori, T.; Sato, T. Development of a tiny orientation estimation device to operate under motion and magnetic disturbance. Int. J. Rob. Res. 2007, 26, 547–559. [Google Scholar] [CrossRef]
- Roetenberg, D.; Luinge, H.J.; Baten, C.; Veltink, P.H. Compensation of magnetic disturbances improves inertial and magnetic sensing of human body segment orientation. IEEE Trans Neural. Syst. Rehabil. Eng. 2005, 13, 395–405. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, A.M. Variable-state-dimension kalman-based filter for orientation determination using inertial and magnetic sensors. Sensors 2012, 12, 8491–8506. [Google Scholar] [CrossRef] [PubMed]
- Chardonnens, J.; Favre, J.; Aminian, K. An effortless procedure to align the local frame of an inertial measurement unit to the local frame of another motion capture system. J. Biomech. 2012, 45, 2297–2300. [Google Scholar] [CrossRef] [PubMed]
- Ligorio, G.; Bergamini, E.; Pasciuto, I.; Vannozzi, G.; Cappozzo, A.; Sabatini, A.M. Assessing the performance of sensor fusion methods: Application to magnetic-inertial-based human body tracking. Sensors 2016, 16, 153. [Google Scholar] [CrossRef] [PubMed]
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ligorio, G.; Sabatini, A.M. Dealing with Magnetic Disturbances in Human Motion Capture: A Survey of Techniques. Micromachines 2016, 7, 43. https://doi.org/10.3390/mi7030043
Ligorio G, Sabatini AM. Dealing with Magnetic Disturbances in Human Motion Capture: A Survey of Techniques. Micromachines. 2016; 7(3):43. https://doi.org/10.3390/mi7030043
Chicago/Turabian StyleLigorio, Gabriele, and Angelo Maria Sabatini. 2016. "Dealing with Magnetic Disturbances in Human Motion Capture: A Survey of Techniques" Micromachines 7, no. 3: 43. https://doi.org/10.3390/mi7030043
APA StyleLigorio, G., & Sabatini, A. M. (2016). Dealing with Magnetic Disturbances in Human Motion Capture: A Survey of Techniques. Micromachines, 7(3), 43. https://doi.org/10.3390/mi7030043