Micromachined Flow Sensors in Biomedical Applications



Abstract
:1. Introduction
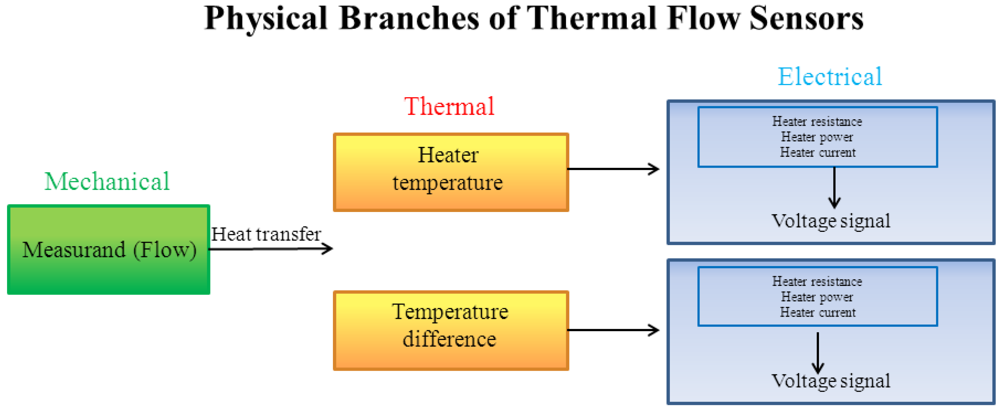
2. Thermal Flow Sensors
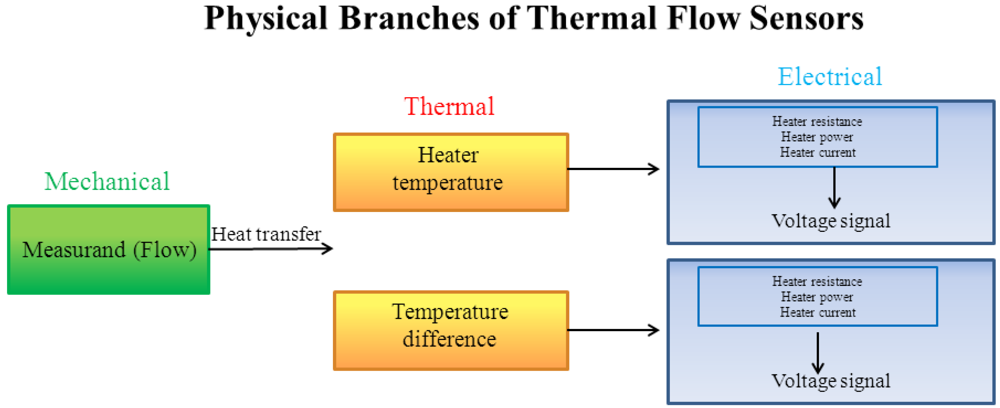
- (a) Hot wire or hot element anemometers. These thermal flow sensors are based on convective heat exchange taking place when the fluid flow passes over the sensing element (hot body). They are normally designed to operate in constant temperature mode or in constant current mode. The former approach requires the adjustment of the current through the hot body in order to keep the sensing element temperature constant: the higher the flow rate, the higher is the current value to establish the thermal equilibrium, which represents an indirect measurement of the flow rate. In the second mode, the current in the hot body is held at a constant value. In this approach, the equilibrium temperature of hot body is modulated by the fluid flow, therefore its electrical impedance variation, caused by heat exchange, represents an indirect measurement of the flow rate;
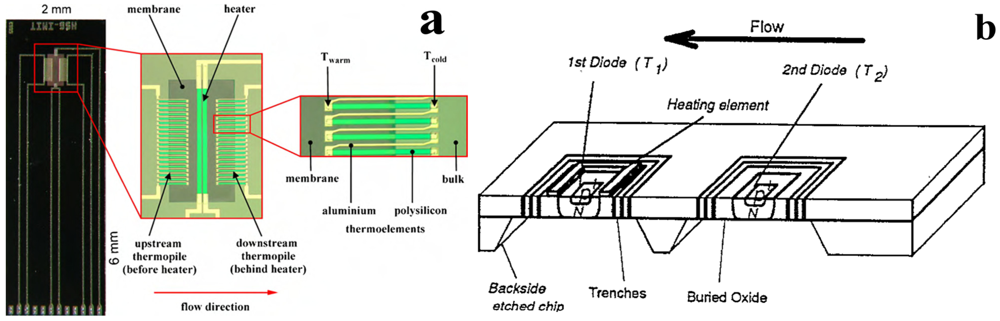
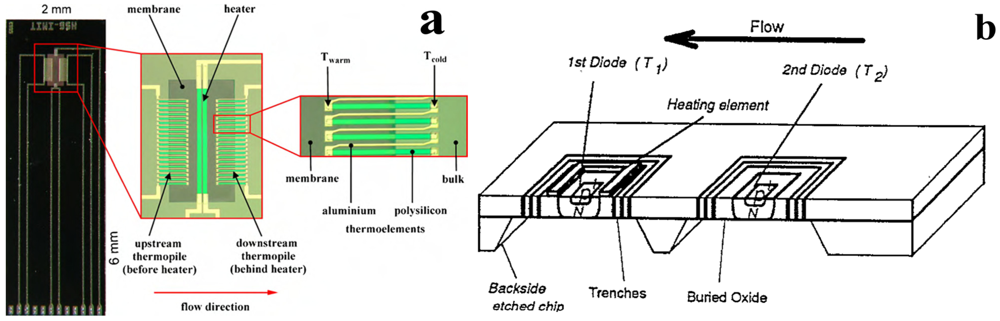
- (b) Calorimetric sensors. These thermal flow sensors are based on the monitoring of the asymmetry of temperature profile around the hot body which is modulated by the fluid flow. Therefore, they use one or more temperature sensing elements placed close to the heater (e.g., Pt100, thermopile).
- - range of measurement. Often reported in terms of velocity, since anemometers measure one point flow velocity, ranges from fraction of cm∙s−1 to several tens of m∙s−1;
- - power consumption. Also the power consumption covers a wide range: some sensors need several hundreds of mW, on the other hand, some papers describe sensors with a consumption of fractions of mW [37];
- - sensor size. The improvement of techniques of fabrication allows the design of sensors with all three dimensions smaller than 100 µm.
2.1. Thermal Flow Sensors: Biomedical Applications
 (1)
(1) (2)
(2)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Measurement Principle | (1) Range of measurement | Power consumption | Application field |
|---|---|---|---|---|
| (2) Rise (tr) or response (τ) time | ||||
| Ma et al. [43] | Thermal Anemometer | (1) up to 90 cm∙s−1 | No data | Respiratory monitoring in neonatal ventilation |
| (2) τ ≈ 1 µs | ||||
| van Putten et al. [39] | Thermal Anemometer | (1) −60 L∙min−1 to +60 L∙min−1 | No data | Respiratory flow measurement |
| (2) tr ranging from 40 ms to 60 ms | ||||
| van Putten et al. [41] | Thermal Anemometer | (1) up to 20 L∙min−1 | No data | Pulmonary function diagnostics |
| (2) tr < 10 ms | ||||
| Laghrouche et al. [46] | Thermal Anemometer | (1) up to 170 L∙min−1 | <10 mW | Spirometer |
| (2) τ ranging from 100 µs to 367 µs | ||||
| Hedrich et al. [12] | Calorimetric Sensor | (1) up to 400 L∙min−1 | <10 mW | Spirometer |
| (2) τ < 2 ms | ||||
| Chiu et al. [48] | Thermal Anemometer | (1) up to 180 L∙min−1 | ≈40 mW | spirometer |
| (2) no data | ||||
| Kaltsas et al. [49] | Thermal Anemometer | (1) −200 L∙min−1 to +200 L∙min−1 | No data | Respiratory monitoring |
| (2) τ ≈ 1.5 ms | ||||
| Shikida et al. [50] | Thermal Anemometer | (1) up to 2 L∙min−1 | No data | Air monitoring in bronchial region |
| (2) τ <100 ms | ||||
| Shikida et al. [51] | Thermal Anemometer | (1) up to 2 L∙min−1 | No data | Nasal respiratory monitoring |
| (2) tr≈260 ms | ||||
| Kersjes et al. [52] | Thermal Anemometer | (1) up to 10 L∙min−1 | <5 mW | Cardiac output monitoring |
| (2) no data | ||||
| Goosen et al. [53] | Calorimetric Sensor | (1) up to 21 cm∙s−1 | No data | Blood flow monitoring |
| (2) no data |
3. Non-Thermal Flow Sensors
 ):
): (3)
(3)
 (4)
(4) (5)
(5) (6)
(6)
3.1. Non-Thermal Flow Sensors: Biomedical Applications
 (7)
(7)| Reference | Measurement Principle | (1) Range of measurement | Power consumption | Application field |
|---|---|---|---|---|
| (2) Rise (tr) or response (τ) time | ||||
| Svedin et al. [62] | Lift-force, thermal anemometry | (1) up to ±50 cm·s−1 | No data | Respiratory monitoring |
| (2) no data | ||||
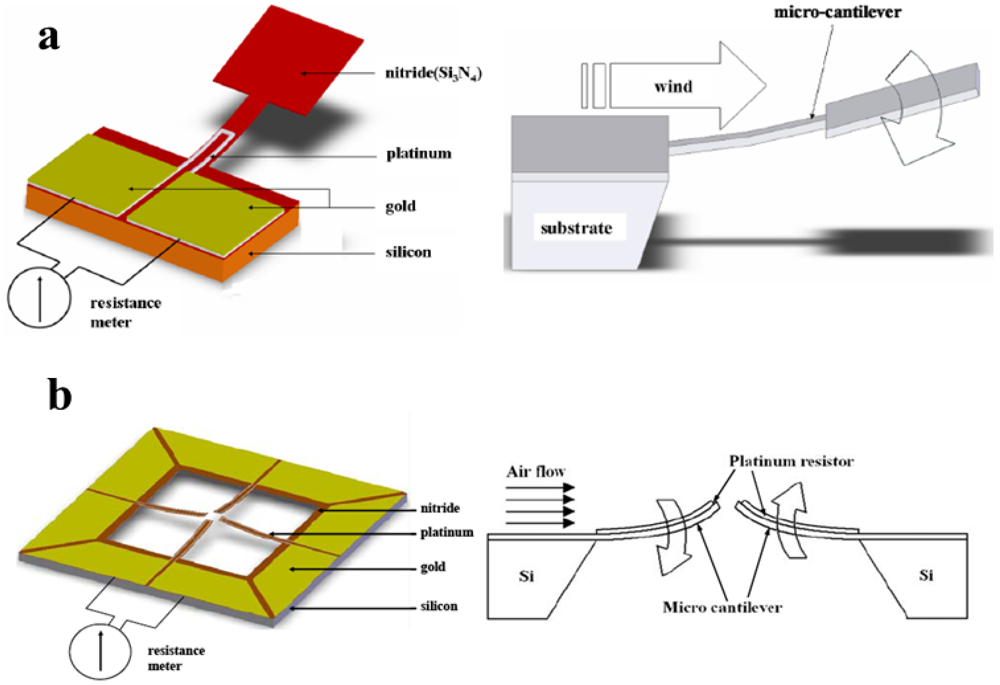
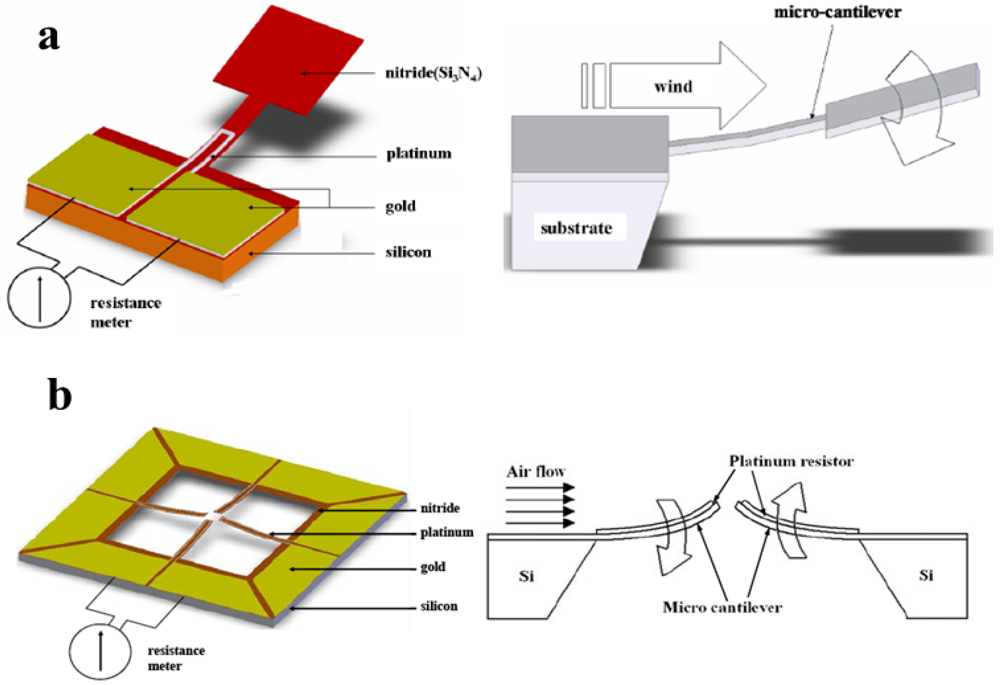
| Wei et al. [78] | Cantilever type | (1) 0.5 m·s−1 to +2.5 m·s−1 | No data | Respiratory monitoring |
| (2) no data | ||||
| Mireles [82] | Interferometric technique | (1) no data | No data | Medical application |
| (2) no data | ||||
| Rapoport et al. [83] | Microrotor-based | (1) from 300 cm·s−1 to 550 cm·s−1 | No data | Blood flow monitoring |
| (2) no data | ||||
| Takahata et al. [77] | Electromagnetic-based | (1) from 40 cm·s−1 to 180 cm·s−1 | No data | Flow monitoring in vessels, bile duct, etc. |
| (2) no data | ||||
| Higurashi et al. [76] | Laser Doppler flowmeter | (1) no data | No data | Monitoring capillary microcirculation |
| (2) no data | ||||
| Kimura et al. [84] | Laser Doppler flowmeter | (1) up to 14 mm·s−1 | No data | Monitoring capillary microcirculation |
| (2) no data |
4. Conclusions
Acknowledgments
References
- Miller, R.W. Introduction to the differential producer. In Flow Measurement Engineering Handbook, 3rd; Miller, R.W., Ed.; McGraw-Hill: New York, NY, USA, 1996; Sections 7.1–7.5. [Google Scholar]
- Wang, Y.H.; Chen, C.P.; Chang, C.M.; Lin, C.P.; Lin, C.H.; Fu, L.M.; Lee, C.Y. MEMS-based gas flow sensors. Microfluid. Nanofluid. 2009, 6, 333–346. [Google Scholar] [CrossRef]
- van Putten, A.F.P.; Middlehoek, S. Integrated silicon anemometer. Electron. Lett. 1974, 10, 425–426. [Google Scholar] [CrossRef]
- Nguyen, N.T. Micromachined flow sensors—A review. Flow Meas. Instrum. 1997, 8, 7–16. [Google Scholar] [CrossRef]
- Petersen, K.; Brown, J. High-Precision, High-performance mass-flow sensor with integrated laminar flow micro-channels. In Proceedings of Technical Digest of the 3rd International Conference of Solid-State Sensors and Actuators (Transducers ’85), Philadelphia, PA, USA, 11–14 June 1985; pp. 361–363.
- Polla, D.L.; Erdman, A.G.; Robbins, W.P.; Markus, D.T.; Diaz-Diaz, J.; Rizq, R.; Nam, Y.; Brickner, H.T. Microdevices in medicine. Ann. Rev. Biomed. Eng. 2000, 2, 551–576. [Google Scholar] [CrossRef]
- Totsu, K.; Haga, Y.; Esashi, M. Ultra-miniature fiber-optic pressure sensor using white light interferometry. J. Micromech. Microeng. 2005, 15, 71–75. [Google Scholar] [CrossRef]
- Zhang, X. Silicon microsurgery-force sensor based on diffractive optical MEMS encoders. Sens. Rev. 2004, 24, 37–41. [Google Scholar] [CrossRef]
- Katuri, K.C.; Asrani, S.; Ramasubramanian, M.K. Intraocular pressure monitoring sensors. IEEE Sens. J. 2008, 8, 12–19. [Google Scholar]
- Yoon, H.J.; Jung, J.M.; Jeong, J.S.; Yang, S.S. Micro devices for a cerebrospinal fluid (CSF) shunt system. Sens. Actuat. A: Phys. 2004, 110, 68–76. [Google Scholar] [CrossRef]
- Allen, M.G. Micromachined endovascularly-implantable wireless aneurysm pressure sensors: From concept to clinic. In Proceedings of the 13th International Conference on Solid-State SensorsActuators and Microsystems (Transducers ’05), Seoul, Korea, 5–9 June 2005; pp. 275–278.
- Hedrich, F.; Kliche, K.; Storz, M.; Billat, S.; Ashauer, M.; Zengerle, R. Thermal flow sensors for MEMS spirometric devices. Sens. Actuat. A: Phys. 2010, 162, 373–378. [Google Scholar] [CrossRef]
- Ziegler, C.M.; Steveling, H.; Seubert, M.; Muhling, J. Endoscopy: A minimally invasive procedure for diagnosis and treatment of diseases of the salivary glands: Six years of practical experience. Br. J. Oral Maxillofac. Surg. 2005, 42, 1–7. [Google Scholar]
- Lee, Y.S.; Song, K.D.; Huh, J.S.; Chung, W.Y.; Lee, D.D. Fabrication of clinical gas sensor using MEMS process. Sens. Actuat. B: Chem. 2005, 108, 292–297. [Google Scholar]
- Hilt, J.Z.; Peppas, N.A. Microfabricated drug delivery devices. Int. J. Pharm. 2005, 306, 15–23. [Google Scholar] [CrossRef]
- Damiani, C.; Klein, S.; Wuttig, D.; Nestler, B. Measurement and control of ultra-low liquid flowrates for drug delivery application. In Proceedings of the 14th Nordic-Baltic Conference on Biomedical Engineering and Medical Physics, Riga, Latvia, June 2008.
- van Oudheusden, B.W. Silicon thermal flow sensor. Sens. Actuat. A: Phys. 1992, 30, 5–26. [Google Scholar] [CrossRef]
- van Putten, A.F.P. An integrated double bridge anemometer. Sens. Actuat. 1983, 4, 387–396. [Google Scholar] [CrossRef]
- Tai, Y.C.; Howe, R.T. Polysilicon bridges for anemometer applications. In Proceedings of Technical Digest of the 3rd International Conference of Solid-State Sensors and Actuators (Transducers ’85), Philadelphia, PA, USA, 11–14 June 1985; pp. 354–357.
- Petersen, K.; Brown, J. High-precision, high-performance mass-flow sensor with integrated laminar flow micro-channels. In Proceedings of Technical Digest of the 3rd International Conference of Solid-State Sensors and Actuators (Transducers ’85), Philadelphia, PA, USA, 11–14 June 1985; pp. 361–363.
- Lammerink, T.S.J.; Tas, N.R.; Elwenspoek, M.; Fluitman, J.H.J. Micro-liquid flow sensor. Sens. Actuat. 1993, 37–38, 45–50. [Google Scholar]
- Tai, Y.C.; Muller, R.S. Lightly-doped polysilicon bridge as a flow meter. Sens. Actuat. 1988, 15, 63–75. [Google Scholar] [CrossRef]
- Löfdahl, L.; Stemme, G.; Johansson, B. Silicon based flow sensors for mean velocity and turbulence measurements. Exp. Fluids 1992, 12, 270–276. [Google Scholar]
- Nguyen, N.T.; Dötzel, W. Asymmetrical locations of heaters and sensors relative to each other using heater arrays: A novel method for designing multi-range electrocaloric mass-flow sensors. Sens. Actuat. A: Phys. 1997, 62, 506–512. [Google Scholar] [CrossRef]
- Kuttner, H.; Urban, G.; Jachimowicz, A.; Kohl, F.; Olcaytug, F.; Goiser, P. Microminiaturized thermistors arrays for temperature gradient, flow and perfusion measurements. Sens. Actuat. A: Phys. 1991, 25, 641–645. [Google Scholar]
- Chen, J.; Fan, Z.; Zou, J.; Engel, J.; Liu, C. Two-dimensional micromachined flow sensor array for fluid mechanics studies. J. Aerosp. Eng. 2003, 16, 85–97. [Google Scholar] [CrossRef]
- Sabate, N.; Santander, J.; Fonseca, L.; Gracia, I.; Cané, C. Multi-range silicon micromachined flow sensor. Sens. Actuat. A: Phys. 2004, 110, 282–288. [Google Scholar] [CrossRef]
- Dijkstra, M.; de Boer, M.J.; Berenschot, J.W.; Lammerink, T.S.J.; Wiegerink, R.J.; Elwenspoek, M. Miniaturized thermal flow sensor with planar-integrated sensor structures on semicircular surface channels. Sens. Actuat. A: Phys. 2008, 143, 1–6. [Google Scholar] [CrossRef]
- Cubukcu, A.S.; Zernickel, E.; Buerklin, U.; Urban, G.A. A 2D thermal flow sensor with sub-mW power consumption. Sens. Actuat. A: Phys. 2010, 163, 449–456. [Google Scholar] [CrossRef]
- Glaninger, A.; Jachimawicz, A.; Kohl, F.; Chabicovsky, R.; Urban, G. Wide range semiconductor flow sensors. Sens. Actuat. A: Phys. 2000, 85, 139–146. [Google Scholar] [CrossRef]
- Yu, B.; Gan, Z.; Cao, S.; Xu, J.; Liu, S. A micro channel integrated gas flow sensor for high sensitivity. In Proceedings of 11st Intersociety Conference on Thermal and Thermomechanical Phenomena in Electronic Systems (ITHERM ’08), Orlando, FL, USA, 28–31 May 2008; pp. 215–220.
- Yu, B.; Gan, Z.; Xu, J.; Liu, S. The study of a micro channel integrated gas flow sensor. Chin. J. Electron. 2009, 18, 435–438. [Google Scholar]
- Lee, C.Y.; Wen, C.; Hou, H.; Yang, R.J.; Tsai, C.H.; Fu, L.M. Design and packaging of MEMS based flow-rate and flow-direction microsensor. Microfluid. Nanofluid. 2009, 6, 363–371. [Google Scholar] [CrossRef]
- Chow, W.W.Y.; Qu, Y.; Li, W.J.; Tung, S.C.H. Integrated SWCNT sensors in micro-wind tunnel for air-flow shear-stress measurement. Microfluid. Nanofluid. 2010, 8, 631–640. [Google Scholar] [CrossRef]
- Kälvesten, E.; Vieider, C.; Löfdahl, L.; Stemme, G. An integrated pressure-flow sensor for correlation measurements in turbulent gas flows. Sens. Actuat. A: Phys. 1996, 52, 51–58. [Google Scholar] [CrossRef]
- Liu, C.; Huang, J.B.; Zhu, Z.; Jiang, F.; Tung, S.; Tai, Y.C.; Ho, C.M. A micromachined flow shear-stress sensor based on thermal transfer principles. J. Microelectronmed. Syst. 1999, 8, 90–99. [Google Scholar] [CrossRef]
- Makinwa, K.A.A.; Huijsing, J.H. A smart wind sensor using thermal sigma-delta modulation Techniques. Sens. Actuat. A: Phys. 2002, 97, 15–20. [Google Scholar] [CrossRef]
- Bates, J.H.T.; Turner, M.J.; Lanteri, C.J.; Jonson, B.; Sly, P.D. Measurement of flow and volume. In Infant Respiratory Function Testing,1st ed.; Stokes, J., Sly, P.D., Tepper, R.S., Morgan, W.J., Eds.; Wiley-Liss Inc.: New York, NY, USA, 1996; pp. 81–116. [Google Scholar]
- van Putten, M.J.A.M.; van Putten, M.H.P.M.; van Putten, A.F.P.; Pompe, J.C.; Bruining, H.A. A silicon bidirectional flow sensor for measuring respiratory flow. IEEE Trans. Biomed. Eng. 1997, 44, 205–208. [Google Scholar] [CrossRef]
- Schena, E.; Silvestri, S. A transistor based air flow transducer for thermohygrometric control of neonatal ventilator application. Rev. Sci. Instrum. 2008, 79, 104301:1–104301:7. [Google Scholar]
- van Putten, A.F.P.; van Putten, M.J.A.M.; van Putten, M.H.P.M.; van Putten, P.F.A.M. Multisensor microsystem for pulmonary function diagnostics. IEEE Sens. J. 2002, 2, 636–643. [Google Scholar] [CrossRef]
- Verta, A.; Schena, E.; Silvestri, S. Mathematical model and minimal measurement system for optimal control of heated humidifiers in neonatal ventilation. Med. Eng. Phys. 2010, 32, 475–481. [Google Scholar] [CrossRef]
- Ma, Y.; Ma, S.; Wang, T.; Fang, W. Air-flow sensor and humidity sensor application to neonatal infant respiration monitoring. Sens. Actuat. A: Phys. 1995, 49, 47–50. [Google Scholar] [CrossRef]
- Randjelovic, D.; Petropoulos, A.; Kaltsas, G.; Stojanovic, M.; Lazic, Z.; Djuric, Z.; Matic, M. Multipurpose MEMS thermal sensor based on thermopiles. Sens. Actuat. A: Phys. 2008, 141, 404–413. [Google Scholar] [CrossRef]
- Miravitlles, M.; Andreu, I.; Romero, Y.; Sitjar, S.; Altes, A.; Anton, E. Difficulties in differential diagnosis of COPD and asthma in primary care. Br. J. Gen. Pract. 2012, 62, e68–e75. [Google Scholar]
- Laghrouche, M.; Montes, L.; Boussey, J.; Ameur, S. Low-cost embedded spirometer based on a micro machined polycrystalline thin film. Flow Meas. Instrum. 2011, 22, 126–130. [Google Scholar] [CrossRef]
- Eckert, D.J.; Malhotra, A. Pathophysiology of adult obstructive sleep apnea. Proc. Am. Thorac. Soc. 2008, 15, 144–153. [Google Scholar]
- Chiu, N.F.; Hsiao, T.C.; Lin, C.W. Low power consumption design of micro-machined thermal sensor for portable spirometer. Tamkang J. Sci. Eng. 2005, 8, 225–230. [Google Scholar]
- Kaltsas, G.; Nassiopoulou, A.G. Gas flow meter for application in medical equipment for respiratory control: Study of the housing. Sens. Actuat. A: Phys. 2004, 110, 413–422. [Google Scholar]
- Shikida, M.; Naito, J.; Yokota, T.; Kawabe, T.; Hayashi, Y.; Sato, K. A catheter-type flow sensor for measurement of aspired- and inspired-air characteristics in the bronchial region. J. Micromech. Microeng. 2009. [Google Scholar] [CrossRef]
- Shikida, M.; Yokota, T.; Naito, J.; Sato, K. Fabrication of a stent-type thermal flow sensor for measuring nasal respiration. J. Micromech. Microeng. 2010. [Google Scholar] [CrossRef]
- Kersjes, R.; Liebscher, F.; Spiegel, E.; Manoli, Y.; Mokwa, W. An invasive catheter flow with on-chip CMOS readout electronics for the on-line determination of blood flow. Sens. Actuat. A: Phys. 1996, 54, 563–567. [Google Scholar] [CrossRef]
- Goosen, J.F.L.; French, P.J.; Sarro, P.M. Pressure and flow sensor for use in catheters. In Proceedings of SPIE, Santa Clara, CA, USA, 20–21 September 1999.
- Goosen, J.F.L.; French, P.J.; Sarro, P.M. Pressure, Flow and oxygen saturation sensors on one chip for use in catheters. In Proceedings of the 13th Annual International Conference on Micro Electro Mechanical Systems (MEMS ’00), Miyazaki, Japan, 23 January 2000.
- Tanase, D.; Goosen, J.F.L.; Trimp, P.J.; French, P.J. Multi-parameter sensor system with intravascular navigation for catheter/guide wire application. Sens. Actuat. A: Phys. 2002, 97–98, 116–124. [Google Scholar]
- Soundararajan, G.; Rouhanizadeh, M.; Yu, H.; DeMaio, L.; Kim, E.S.; Hsiai, T.K. MEMS shear stress sensors for microcirculation. Sens. Actuat. A: Phys. 2005, 118, 25–32. [Google Scholar]
- Laghrouche, M.; Montes, L.; Boussey, J.; Meunier, D.; Ameur, S.; Adanee, A. In situ calibration of wall shear stress sensor for micro fluidic application. In Proceedings of Eurosensors XXV, Athens, Greece, 4–7 September 2011.
- Tao, S.L.; Desai, T.A. Microfabricated drug delivery sistems: From particles to pores. Adv. Drug Deliv. Rev. 2003, 55, 315–328. [Google Scholar] [CrossRef]
- Svedin, N.; Stemme, E.; Stemme, G. A new Bi-directional gas-flow sensor based on lift force. In Proceedings of the 9th International Conference on Solid-State Sensors and Actuators (Transducers ’97), Chicago, IL, USA, 16–19 June 1997; pp. 16–19.
- Svedin, N.; Kalvesten, E.; Stemme, E.; Stemme, G. A new silicon gas-flow sensor based on lift force. J. Micromech. Syst. 1998, 7, 303–308. [Google Scholar] [CrossRef]
- Svedin, N.; Kalvesten, E.; Stemme, E.; Stemme, G. A lift force sensor designed for acceleration insensivity. Sens. Actuat. A: Phys. 1998, 68, 263–268. [Google Scholar] [CrossRef]
- Svedin, N.; Kalvesten, E.; Stemme, G. A lift force sensor with integrated hot-chips for wide range flow measurements. Sens. Actuat. A: Phys. 2003, 109, 120–130. [Google Scholar] [CrossRef]
- Gass, V.; van Der Schoot, B.H.; de Rooij, N.F. Nanofluid handling by micro-flow-sensor based on drag force measurements. In Proceedings of 6th IEEE International Workshop on Micro Electromechanical System (MEMS ’93), Fort Lauderdale, FL, USA, 7–10 February 1993; pp. 167–172.
- Su, Y.; Evans, A.G.R.; Brunnschweiler, A.; Ensell, G. Characterization of a highly sensitive ultra-thin piezoresistive silicon cantilever probe and its application in gas flow velocity sensing. J. Micromech. Microeng. 2002. [Google Scholar] [CrossRef]
- Kao, I.; Kumar, A.; Binder, J. Smart MEMS flow sensor: Theoretical analysis and experimental characterization. IEEE Sens. J. 2007, 7, 713–722. [Google Scholar] [CrossRef]
- Wang, Y.H.; Lee, C.Y.; Chiang, C.M. A MEMS-based air flow sensor with a free-standing micro-cantilever structure. Sensors 2007, 7, 2389–2401. [Google Scholar] [CrossRef]
- Ma, R.H.; Wang, D.A.; Hsueh, T.H.; Lee, C.Y. A MEMS-based flow rate and flow direction sensing platform with integrated temperature compensation scheme. Sensors 2009, 9, 5460–5476. [Google Scholar] [CrossRef]
- Du, L.; Zhao, Z.; Pang, C.; Fang, Z. Drag force micro solid state silicon plate wind velocity sensor. Sens. Actuat. A: Phys. 2009, 151, 35–41. [Google Scholar] [CrossRef]
- Du, L.; Zhao, Z.; Fang, Z.; Xu, J.; Geng, D.; Liu, Y. A micro-wind sensor based on mechanical drag and thermal effects. Sens. Actuat. A: Phys. 2009, 155, 66–72. [Google Scholar] [CrossRef]
- Berberig, O.; Nottmeyer, K.; Mizuno, J.; Kanai, Y.; Kobayashi, T. The Prandtl micro flow sensor (PMFS): A novel silicon diaphragm capacitive sensor for flow-velocity measurement. Sens. Actuat. A: Phys. 1998, 66, 93–98. [Google Scholar] [CrossRef]
- Bouwstra, S.; Kemna, P.; Legtenberg, R. Thermally excited resonating membrane mass flow sensor. Sens. Actuat. A: Phys. 1989, 20, 213–223. [Google Scholar] [CrossRef]
- Bouwstra, S.; Legtenberg, R.; Tilmans, H.A.C.; Elwenspoek, M. Resonating microbridge mass flow sensor. Sens. Actuat. A: Phys. 1990, 21, 332–335. [Google Scholar] [CrossRef]
- Seo, Y.H.; Kim, B.H. A self-resonant micro flow velocity sensor based on a resonant frequency shift by flow-induced vibration. J. Micromech. Microeng. 2010. [Google Scholar] [CrossRef]
- Silvestri, S.; Schena, E. Optical-fiber measurement systems for medical applications. In Optoelectronics—Devices and Applications, 1st; Predeep, P., Ed.; InTech: Lexington, KY, USA, 2011; pp. 205–224. [Google Scholar]
- de Mul, F.F.M.; van Spijker, J.; van Der Plas, D.; Greve, J.; Aarnoudse, J.G.; Smits, T.M. Mini laser-Doppler (blood) flow monitor with diode laser source and detection integrated in the probe. Appl. Opt. 1984, 23, 2970–2973. [Google Scholar]
- Higurashi, E.; Sawada, R.; Ito, T. An integrated laser blood flowmeter. J. Lightwave Technol. 2003, 21, 591–595. [Google Scholar] [CrossRef]
- Takahata, K.; Gianchandani, B.; Wise, K.D. Micromachineed antenna stents and cuffs for monitoring intraluminal pressure and flow. J. Micromech. Syst. 2006, 15, 1289–1298. [Google Scholar] [CrossRef]
- Wei, C.L.; Lin, C.F.; Tseng, I.T. A novel MEMS respiratory flow sensor. IEEE Sens. J. 2010, 10, 16–18. [Google Scholar] [CrossRef]
- Battista, L.; Sciuto, S.A.; Scorza, A. Preliminary evaluation of a fiber-optic sensor for flow measurements in pulmonary ventilators. In Proceedings of the 6th Annual International Workshop on Medical Measurements and Applications, Bari, Italy, 30–31 May 2011; pp. 29–34.
- Schena, E.; Saccomandi, P.; Mastrapasqua, M.; Silvestri, S. An optical fiber based flow transducer for infant ventilation: measurement principle and calibration. In Proceedings of the 6th Annual International Workshop on Medical Measurements and Applications, Bari, Italy, 30–31 May 2011; pp. 311–315.
- Saccomandi, P.; Schena, E.; Silvestri, S. A novel target-type low pressure drop bidirectional optoelectronic air flow sensor for infant artificial ventilation: Measurement principle and static calibration. Rev. Sci. Instrum. 2011, 82, 024301:1–024301:9. [Google Scholar]
- Mireles, J. Micromachined sensor design for optical-fiber flow measurement. Sens. Rev. 2005, 25, 33–39. [Google Scholar] [CrossRef]
- Rapoport, S.D.; Reed, M.L.; Weiss, L.E. Fabrication and testing of a microdynamic rotor for blood flow measurements. J. Micromech. Microeng. 1991, 1, 60–65. [Google Scholar] [CrossRef]
- Kimura, Y.; Goma, M.; Higurashi, E.; Sawada, R. Integrated laser Doppler blood flowmeter designed to enable wafer-level packaging. IEEE Trans. Biomed. Eng. 2010, 57, 2026–2033. [Google Scholar] [CrossRef]
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Silvestri, S.; Schena, E. Micromachined Flow Sensors in Biomedical Applications. Micromachines 2012, 3, 225-243. https://doi.org/10.3390/mi3020225
Silvestri S, Schena E. Micromachined Flow Sensors in Biomedical Applications. Micromachines. 2012; 3(2):225-243. https://doi.org/10.3390/mi3020225
Chicago/Turabian StyleSilvestri, Sergio, and Emiliano Schena. 2012. "Micromachined Flow Sensors in Biomedical Applications" Micromachines 3, no. 2: 225-243. https://doi.org/10.3390/mi3020225
APA StyleSilvestri, S., & Schena, E. (2012). Micromachined Flow Sensors in Biomedical Applications. Micromachines, 3(2), 225-243. https://doi.org/10.3390/mi3020225