
Mechano-Filtering Encapsulation: A Stitching-Based Packaging Strategy Implementing Active Noise Suppression in Piezoresistive Pressure Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials and Chemicals
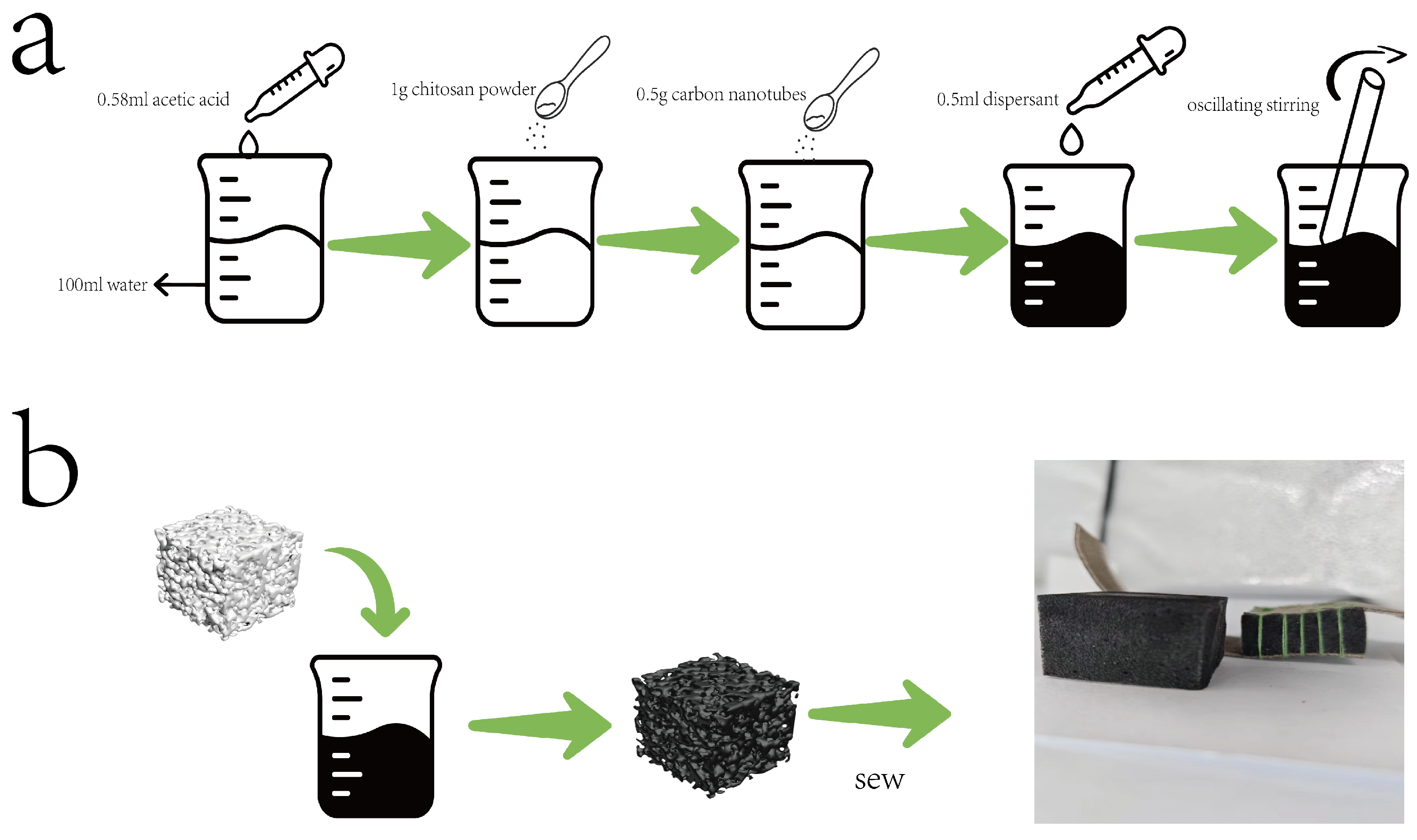
2.2. Preparation of CS/CNT Solution
2.3. Fabrication of Sewing-Based Encapsulated CS/CNT Sponge Sensor
2.4. Characterization and Measurements
3. Results
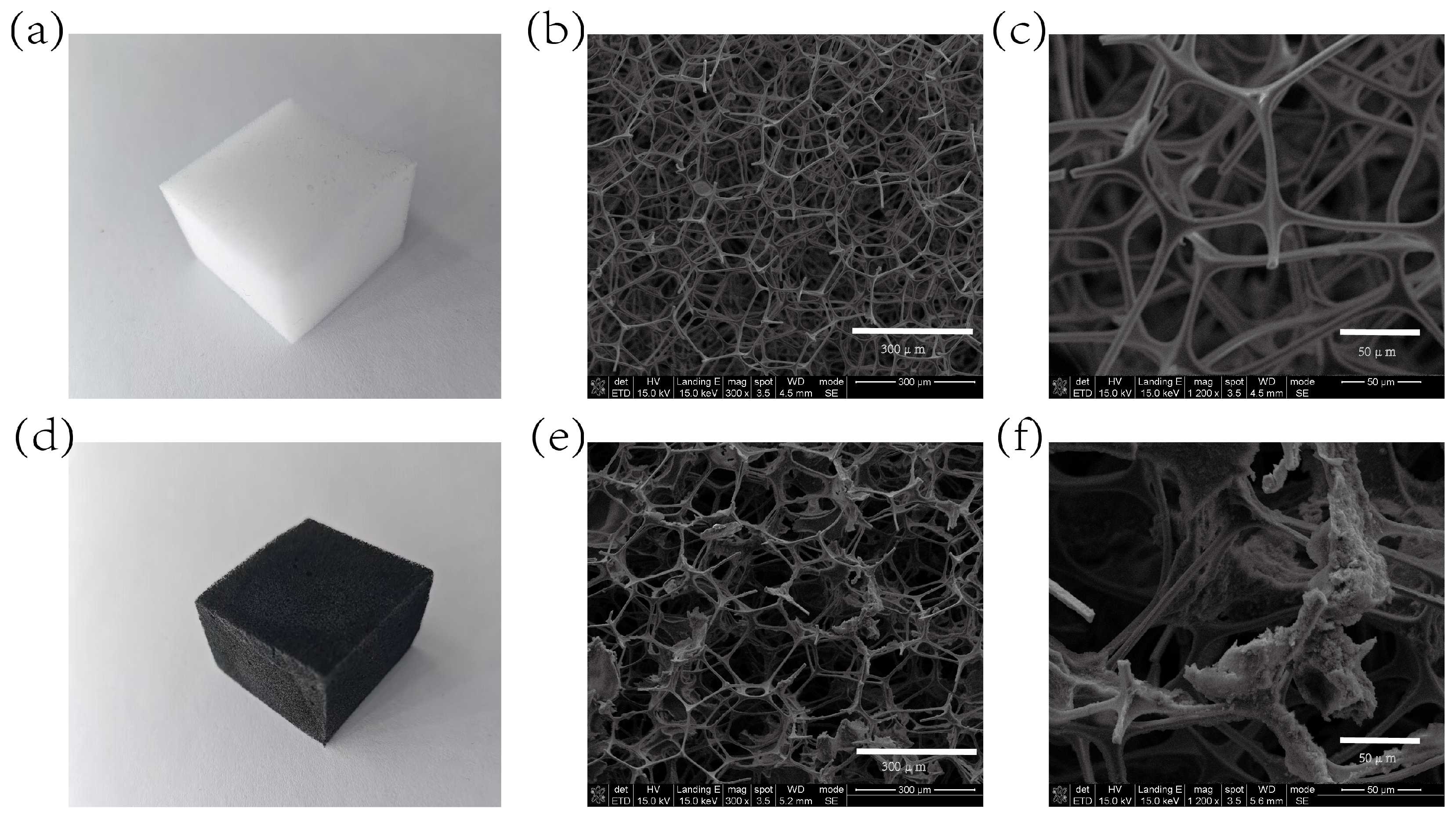
3.1. Physical Structure Characterization
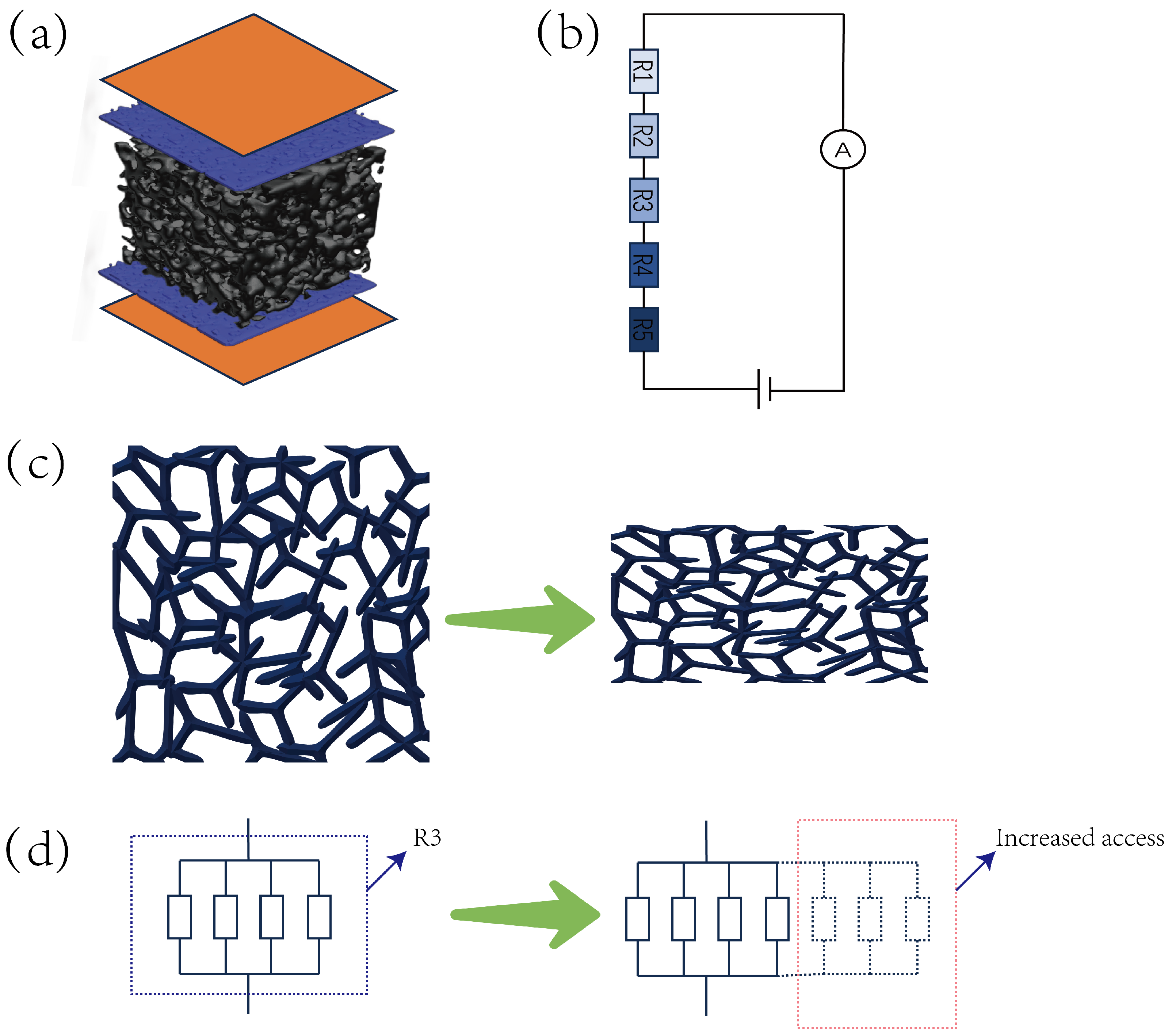
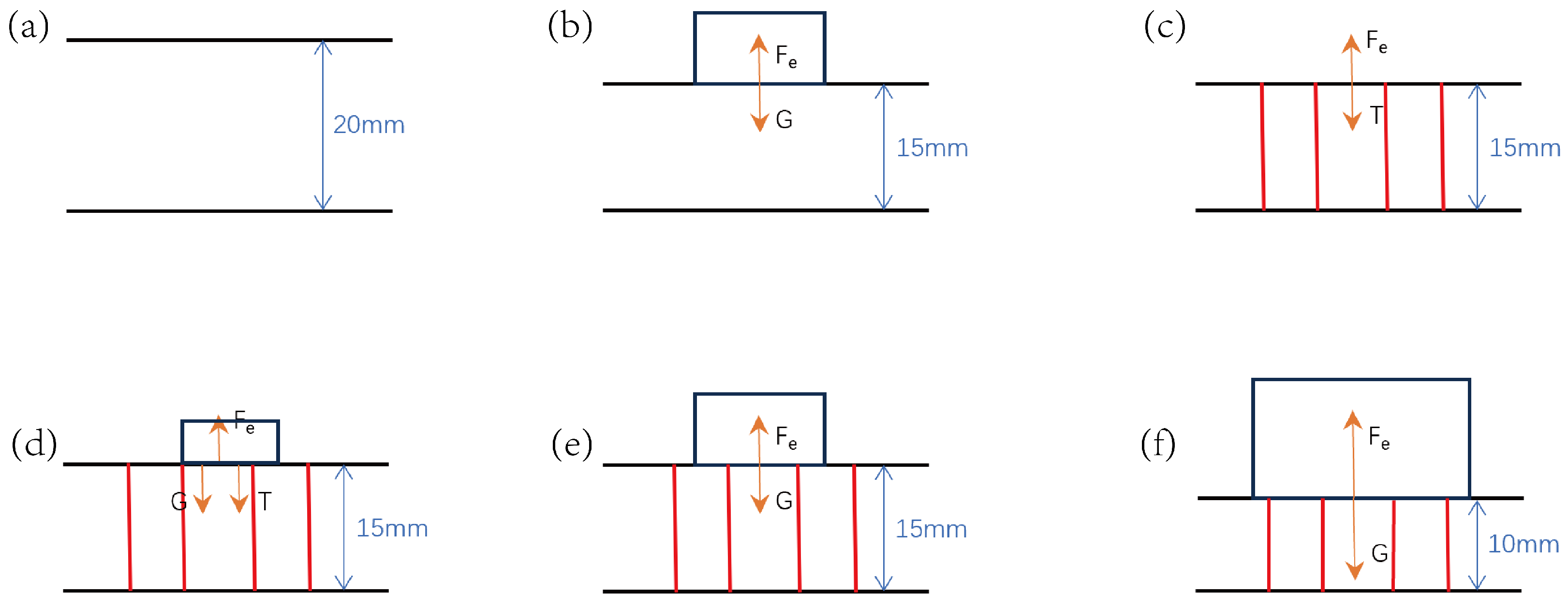
3.2. Sensing Mechanism
3.3. Basic Sensing Characteristics
3.4. Application of Sensors
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choudhry, N.A.; Shekhar, R.; Khan, I.A.; Rasheed, A.; Padhye, R.; Arnold, L.; Wang, L. Fabrication and Characterization of Single-Layer Textile-Based Flexible Pressure Sensors for Smart Wearable Electronics Applications. Adv. Eng. Mater. 2023, 25, 2201736. [Google Scholar] [CrossRef]
- Zhu, R.; Wu, J.; Li, F.; Nan, S.; Shang, F.; Zhang, J. Textured elastomeric interface actuated sustainable and bacteriostatic sensors for wearable electronics in healthcare. Mater. Today Phys. 2025, 51, 101648. [Google Scholar] [CrossRef]
- Chen, K.; Liu, B.; Hu, N.; Fan, Q.; Zhan, F.; Zhang, Z.; Ni, Z.; Li, X.; Hu, T. A biodegradable, highly sensitive and multifunctional mechanical sensor based on rGO-silk fibroin hydrogel for human motion detection and gesture recognition. J. Mater. Chem. A 2024, 12, 3283–3293. [Google Scholar] [CrossRef]
- Wang, B.; Shi, Y.; Li, H.; Hua, Q.; Ji, K.; Dong, Z.; Cui, Z.; Huang, T.; Chen, Z.; Wei, R.; et al. Body-Integrated Ultrasensitive All-Textile Pressure Sensors for Skin-Inspired Artificial Sensory Systems. Small Sci. 2024, 4, 2400026. [Google Scholar] [CrossRef] [PubMed]
- Liang, Z.; Niu, M.; Xie, F.; Zhang, D.; Dai, L.; Cai, X. A Single-Ply and Knit-Only Textile Sensing Matrix for Mapping Body Surface Pressure. IEEE Sens. J. 2024, 24, 26334–26341. [Google Scholar] [CrossRef]
- Wang, P.; Hou, Z.; Chen, S.; Ren, S.; Zhao, M.; Yang, L. Biomaterials for flexible pressure sensors: Innovations and advancements. J. Mater. Chem. C 2024, 12, 18138–18166. [Google Scholar] [CrossRef]
- Li, W.; Liu, A.; Wang, Y.; Qu, K.; Wen, H.; Zhao, J.; Shi, Y.; Wang, H.; Ye, M.; Guo, W. Implantable and Degradable Wireless Passive Protein-Based Tactile Sensor for Intracranial Dynamic Pressure Detection. Electronics 2023, 12, 2466. [Google Scholar] [CrossRef]
- Lee, D.; Lee, H.; Jeong, Y.; Ahn, Y.; Nam, G.; Lee, Y. Highly Sensitive, Transparent, and Durable Pressure Sensors Based on Sea-Urchin Shaped Metal Nanoparticles. Adv. Mater. 2016, 28, 9364–9369. [Google Scholar] [CrossRef]
- Wu, X.; Han, Y.; Zhang, X.; Lu, C. Spirally Structured Conductive Composites for Highly Stretchable, Robust Conductors and Sensors. ACS Appl. Mater. Interfaces 2017, 9, 23007–23016. [Google Scholar] [CrossRef]
- Zhao, L.; Lin, Z.; Lai, K.W.C. Skin-Integrated, Stretchable Electronic Skin for Human Motion Capturing and Pressure Mapping. Adv. Sens. Res. 2024, 3, 2300025. [Google Scholar] [CrossRef]
- Li, Y.; Matsumura, G.; Xuan, Y.; Honda, S.; Takei, K. Stretchable Electronic Skin using Laser-Induced Graphene and Liquid Metal with an Action Recognition System Powered by Machine Learning. Adv. Funct. Mater. 2024, 34, 2313824. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, X.; Hu, Z.; Sun, Q.; Liu, M.; Gu, P.; Yang, X.; Huang, J.; Zu, G. Broad-Range-Response Battery-Type All-in-one Self-Powered Stretchable Pressure-Sensitive Electronic Skin. Small 2024, 20, 2305925. [Google Scholar] [CrossRef]
- Farman, M.; Prajesh, R.; Upadhyay, A.K.; Kumar, P.; Thouti, E. All-Polydimethylsiloxane-Based Highly Flexible and Stable Capacitive Pressure Sensors with Engineered Interfaces for Conformable Electronic Skin. ACS Appl. Mater. Interfaces 2023, 15, 34195–34205. [Google Scholar] [CrossRef] [PubMed]
- Cai, Y.W.; Zhang, X.N.; Wang, G.G.; Li, G.Z.; Zhao, D.Q.; Sun, N.; Li, F.; Zhang, H.Y.; Han, J.C.; Yang, Y. A flexible ultra-sensitive triboelectric tactile sensor of wrinkled PDMS/MXene composite films for E-skin. Nano Energy 2021, 81, 105663. [Google Scholar] [CrossRef]
- Yu, Z.; Ying, W.B.; Pravarthana, D.; Li, Y.Y.; Mao, G.Y.; Liu, Y.W.; Hu, C.; Zhang, W.X.; He, P.X.; Zhong, Z.C.; et al. Stretchable tactile sensor with high sensitivity and dynamic stability based on vertically aligned urchin-shaped nanoparticles. Mater. Today Phys. 2020, 14, 105663. [Google Scholar] [CrossRef]
- Tian, G.; Shi, Y.; Deng, J.; Yu, W.; Yang, L.; Lu, Y.; Zhao, Y.; Jin, X.; Ke, Q.; Huang, C. Low-Cost, Scalable Fabrication of All-Fabric Piezoresistive Sensors via Binder-Free, In-Situ Welding of Carbon Nanotubes on Bicomponent Nonwovens. Adv. Fiber Mater. 2024, 6, 120–132. [Google Scholar] [CrossRef]
- Yu, W.; Bai, X.; Tian, G.; Deng, J.; Zhang, Z.; Ke, Q.; Liu, S.; Huang, C. Robust bonding of Ag nanoparticles on bicomponent fibers enabled highly reliable, multi-functional piezoresistive sensing. Chem. Eng. J. 2025, 503, 158414. [Google Scholar] [CrossRef]
- Ji, C.; Zhang, Q.; Jing, Z.; Liu, Y.; Han, D.; Wang, J.; Zhang, W.; Sang, S. Highly Sensitive Wearable Flexible Pressure Sensor Based on Conductive Carbon Black/Sponge. IEEE Trans. Electron. Devices 2021, 68, 5198–5203. [Google Scholar] [CrossRef]
- Wang, H.; Ruan, D.; Gan, L.; Shen, Z.; Zhuo, J.; Chen, X.; Zhou, F.; Jia, Z.; Li, T.; Hu, H. A Capacitive Pressure Sensor With Adjustable Working Range for Deep Sea. IEEE Sens. J. 2024, 24, 37005–37014. [Google Scholar] [CrossRef]
- Hänisch, K.; Spitzner, S.J.; Khaanghah, N.S.; Nair, R.R.; Antrack, T.; Kleemann, H.; Leo, K. Flexible Pressure Sensors Based on Biodegradable Leaf Scaffolds. IEEE Sens. Lett. 2025, 9, 1–4. [Google Scholar] [CrossRef]
- Yang, J.; Luo, S.; Zhou, X.; Li, J.; Fu, J.; Yang, W.; Wei, D. Flexible, Tunable, and Ultrasensitive Capacitive Pressure Sensor with Microconformal Graphene Electrodes. ACS Appl. Mater. Interfaces 2019, 11, 14997–15006. [Google Scholar] [CrossRef] [PubMed]
- Hosseini, E.S.; Manjakkal, L.; Shakthivel, D.; Dahiya, R. Glycine-Chitosan-Based Flexible Biodegradable Piezoelectric Pressure Sensor. ACS Appl. Mater. Interfaces 2020, 12, 9008–9016. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Zhang, L.; Wu, T.; Song, H.; Tang, C. Flexible piezoelectric pressure sensor with high sensitivity for electronic skin using near-field electrohydrodynamic direct-writing method. Extrem. Mech. Lett. 2021, 48, 101279. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Z.; Li, X.; Lin, Y.; Luo, N.; Long, M.; Zhao, N.; Xu, J.B. Flexible Piezoelectric-Induced Pressure Sensors for Static Measurements Based on Nanowires/Graphene Heterostructures. ACS Nano 2017, 11, 4507–4513. [Google Scholar] [CrossRef] [PubMed]
- Zhan, Z.; Lin, R.; Tran, V.T.; An, J.; Wei, Y.; Du, H.; Tran, T.; Lu, W. Paper/Carbon Nanotube-Based Wearable Pressure Sensor for Physiological Signal Acquisition and Soft Robotic Skin. ACS Appl. Mater. Interfaces 2017, 9, 37921–37928. [Google Scholar] [CrossRef]
- Han, Z.; Li, H.; Xiao, J.; Song, H.; Lo, B.; Cai, S.; Chen, Y.; Ma, Y.; Feng, X. Ultralow-Cost, Highly Sensitive, and Flexible Pressure Sensors Based on Carbon Black and Airlaid Paper for Wearable Electronics. ACS Appl. Mater. Interfaces 2019, 11, 33370–33379. [Google Scholar] [CrossRef]
- Li, Z.; Li, Z.H.; Zhang, Y.; Xu, X.; Cheng, Y.; Zhang, Y.; Zhao, J.; Wei, N. Highly Sensitive Weaving Sensor of Hybrid Graphene Nanoribbons and Carbon Nanotubes for Enhanced Pressure Sensing Function. ACS Sens. 2024, 9, 2499–2508. [Google Scholar] [CrossRef]
- Li, F.; Fang, S.; Shen, Y.; Wang, D. Research on graphene/silicon pressure sensor array based on backpropagation neural network. Electron. Lett. 2021, 57, 419–421. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Liu, T.; Lu, Y.; Shang, C.; Ding, X.; Zhang, J.; Feng, Y.; Xu, F.J. Wearable, Washable, and Highly Sensitive Piezoresistive Pressure Sensor Based on a 3D Sponge Network for Real-Time Monitoring Human Body Activities. ACS Appl. Mater. Interfaces 2021, 13, 46848–46857. [Google Scholar] [CrossRef]
- Zheng, Y.; Yin, R.; Zhao, Y.; Liu, H.; Zhang, D.; Shi, X.; Zhang, B.; Liu, C.; Shen, C. Conductive MXene/cotton fabric based pressure sensor with both high sensitivity and wide sensing range for human motion detection and E-skin. Chem. Eng. J. 2021, 420, 127720. [Google Scholar] [CrossRef]
- Qin, R.; Nong, J.; Wang, K.; Liu, Y.; Zhou, S.; Hu, M.; Zhao, H.; Shan, G. Recent Advances in Flexible Pressure Sensors Based on MXene Materials. Adv. Mater. 2024, 36, 2312761. [Google Scholar] [CrossRef]
- Wang, Y.; Yue, Y.; Cheng, F.; Cheng, Y.; Ge, B.; Liu, N.; Gao, Y. Ti3C2Tx MXene-Based Flexible Piezoresistive Physical Sensors. ACS Nano 2022, 16, 1734–1758. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Xu, Y.; Guo, Q.; Yin, F.; Yuan, W. Highly stretchable pressure sensors with wrinkled fibrous geometry for selective pressure sensing with minimal lateral strain-induced interference. Compos. Part B-Eng. 2021, 217, 108899. [Google Scholar] [CrossRef]
- Cheng, Y.; Ma, Y.; Li, L.; Zhu, M.; Yue, Y.; Liu, W.; Wang, L.; Jia, S.; Li, C.; Qi, T.; et al. Bioinspired Microspines for a High-Performance Spray Ti3C2Tx MXene-Based Piezoresistive Sensor. ACS Nano 2020, 14, 2145–2155. [Google Scholar] [CrossRef]
- Liu, S.; Liu, X.; Cui, X.; Zhu, M.; Lu, S. 3D printed MXene/rGO hierarchical porous structure based on ultralow-concentration 2D nanomaterial inks for highly sensitive pressure sensing. Chem. Eng. J. 2024, 496, 154250. [Google Scholar] [CrossRef]
- Kuang, J.; Dai, Z.; Liu, L.; Yang, Z.; Jin, M.; Zhang, Z. Synergistic effects from graphene and carbon nanotubes endow ordered hierarchical structure foams with a combination of compressibility, super-elasticity and stability and potential application as pressure sensors. Nanoscale 2015, 7, 9252–9260. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Guan, X.; Huang, H.; Wang, H.; Lin, W.; Peng, Z. Full 3D Printing of Stretchable Piezoresistive Sensor with Hierarchical Porosity and Multimodulus Architecture. Adv. Funct. Mater. 2019, 29, 1807569. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Z.; Du, S.; Zong, S.; Ning, Z.; Yang, F. Highly Sensitive Biomimetic Crack Pressure Sensor with Selective Frequency Response. ACS Sens. 2024, 9, 3057–3065. [Google Scholar] [CrossRef]
- Zhao, Y.; Guo, X.; Hong, W.; Zhu, T.; Zhang, T.; Yan, Z.; Zhu, K.; Wang, J.; Zheng, G.; Mao, S.; et al. Biologically imitated capacitive flexible sensor with ultrahigh sensitivity and ultralow detection limit based on frog leg structure composites via 3D printing. Compos. Sci. Technol. 2023, 231, 109837. [Google Scholar] [CrossRef]
- Tu, S.; Xi, Y.; Cui, X.; Xu, Z.; Liu, Z.; Zhu, Y. Skin-inspired interlocked microstructures with soft-hard synergistic effect for high-sensitivity and wide-linear-range pressure sensing. Chem. Eng. J. 2024, 496, 154083. [Google Scholar] [CrossRef]
- Li, L.; Zhu, G.; Wang, J.; Chen, J.; Zhao, G.; Zhu, Y. A flexible and ultrasensitive interfacial iontronic multisensory sensor with an array of unique “cup-shaped” microcolumns for detecting pressure and temperature. Nano Energy 2023, 105, 108012. [Google Scholar] [CrossRef]
- Wang, Y.; Luo, W.; Wen, Y.; Zhao, J.; Chen, C.; Chen, Z.; Zhang, X.S. Wearable, washable piezoresistive pressure sensor based on polyurethane sponge coated with composite CNT/CB/TPU. Mater. Today Phys. 2025, 52, 101681. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Zhao, Y.; Xue, T.; Wang, X.; Zou, Q. Mechano-Filtering Encapsulation: A Stitching-Based Packaging Strategy Implementing Active Noise Suppression in Piezoresistive Pressure Sensors. Micromachines 2025, 16, 486. https://doi.org/10.3390/mi16040486
Yu Y, Zhao Y, Xue T, Wang X, Zou Q. Mechano-Filtering Encapsulation: A Stitching-Based Packaging Strategy Implementing Active Noise Suppression in Piezoresistive Pressure Sensors. Micromachines. 2025; 16(4):486. https://doi.org/10.3390/mi16040486
Chicago/Turabian StyleYu, Yi, Yingying Zhao, Tao Xue, Xinyi Wang, and Qiang Zou. 2025. "Mechano-Filtering Encapsulation: A Stitching-Based Packaging Strategy Implementing Active Noise Suppression in Piezoresistive Pressure Sensors" Micromachines 16, no. 4: 486. https://doi.org/10.3390/mi16040486
APA StyleYu, Y., Zhao, Y., Xue, T., Wang, X., & Zou, Q. (2025). Mechano-Filtering Encapsulation: A Stitching-Based Packaging Strategy Implementing Active Noise Suppression in Piezoresistive Pressure Sensors. Micromachines, 16(4), 486. https://doi.org/10.3390/mi16040486