
Flexible Three-Dimensional Force Tactile Sensor Based on Velostat Piezoresistive Films


Abstract
1. Introduction
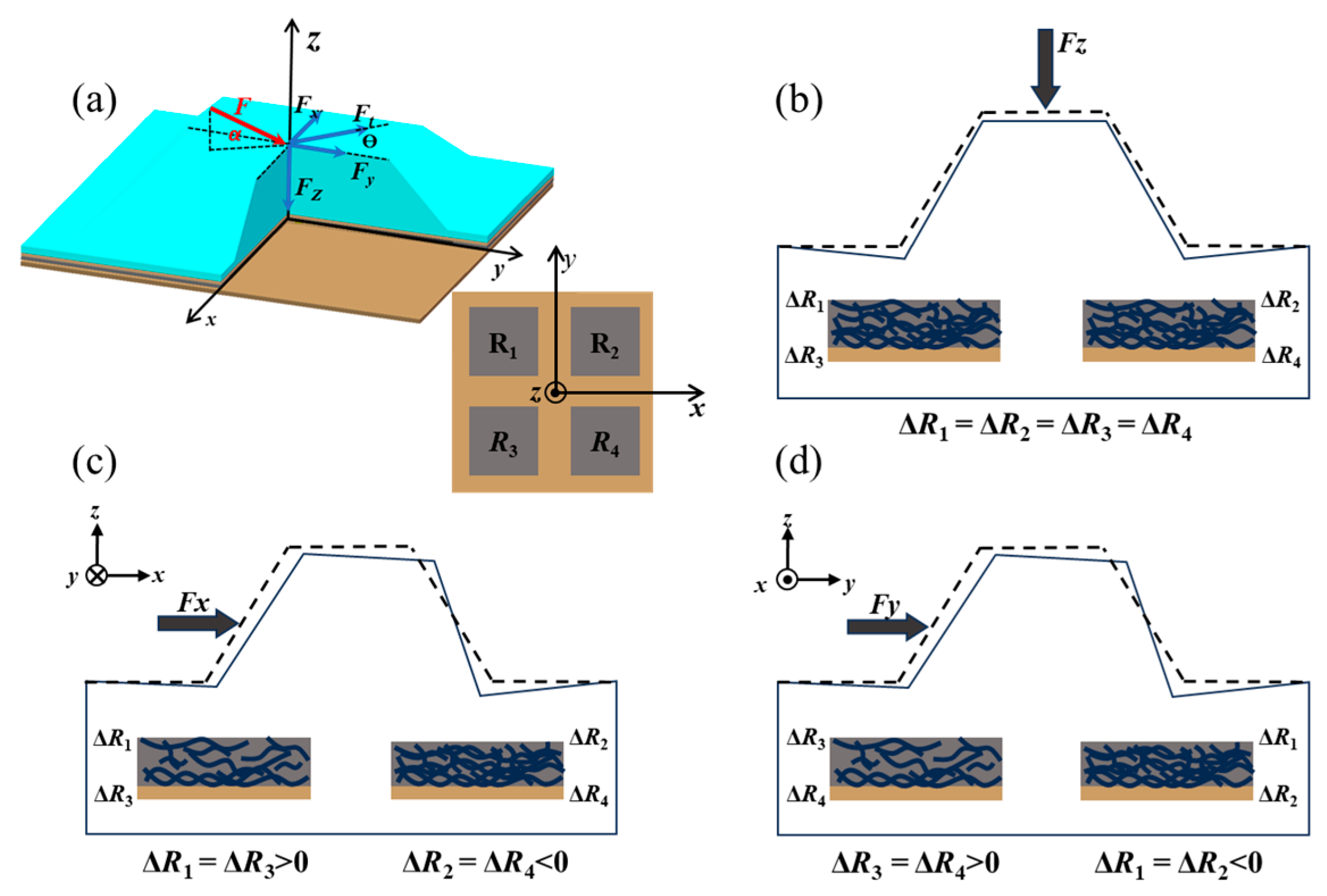
2. The 3D Force-Sensing Mechanism
3. Design and Manufacturing of the Sensor
3.1. Material
3.2. Structural Design
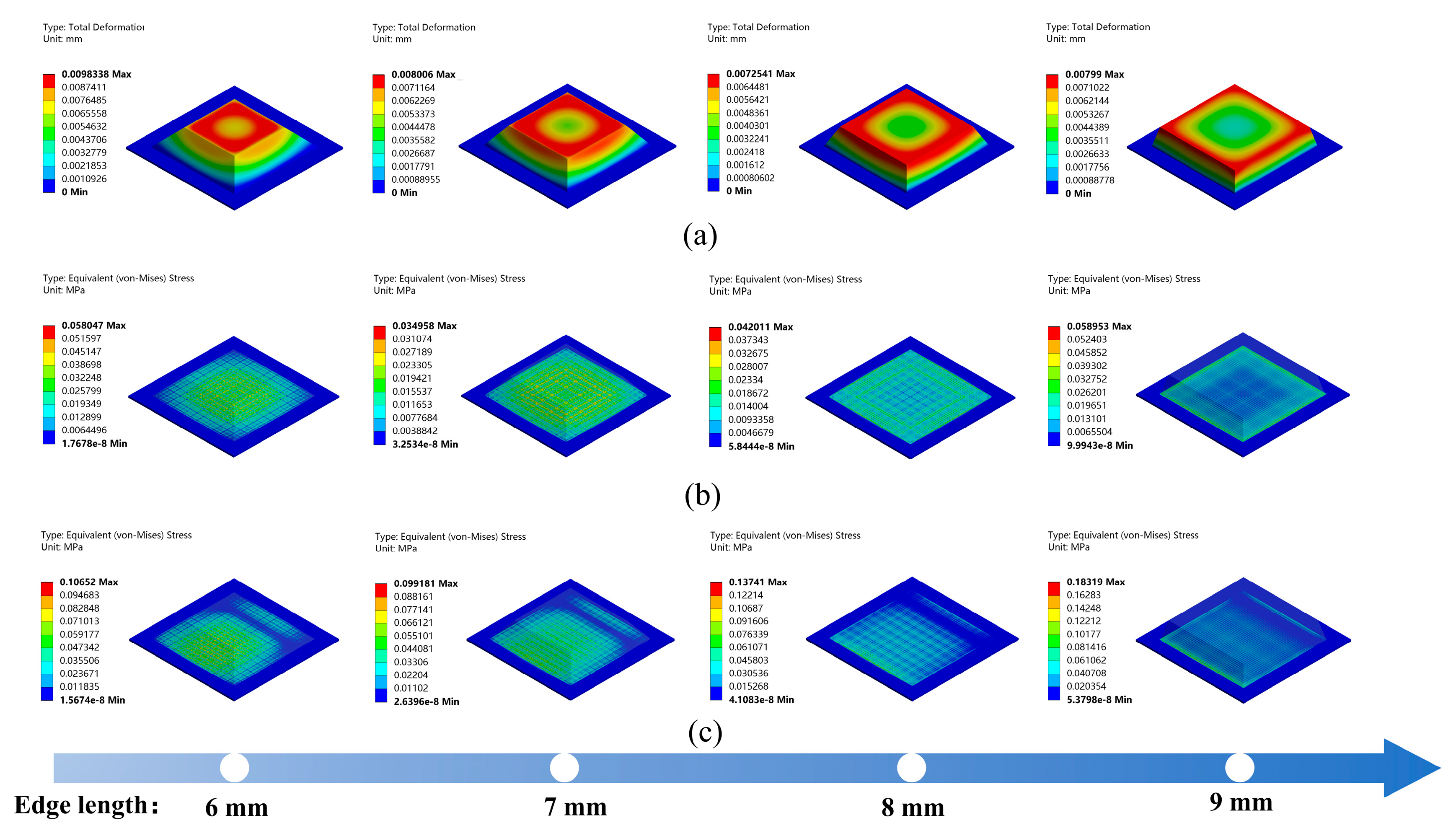
3.2.1. Design of the Bump
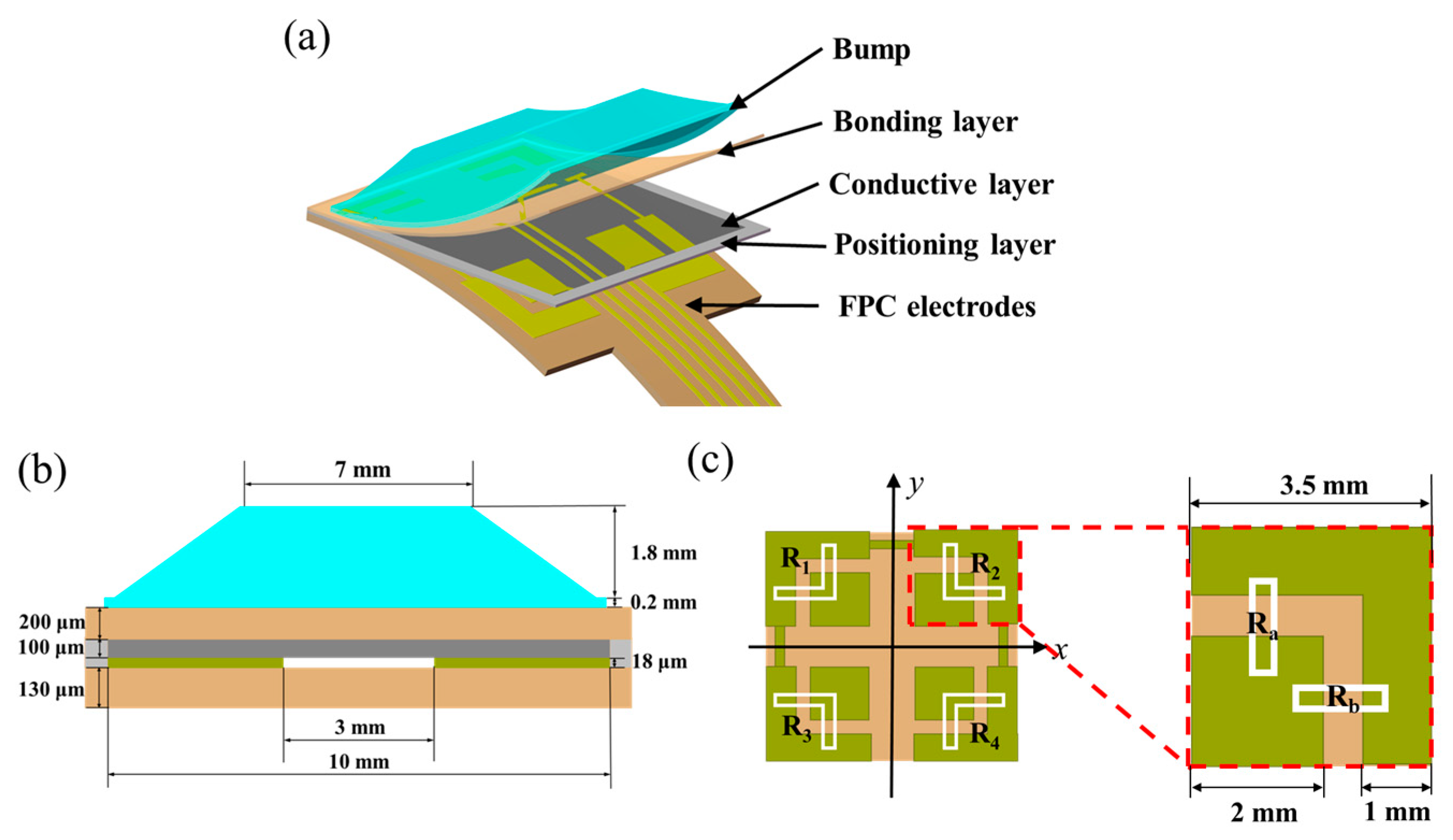
3.2.2. Layered Structure of the Sensor
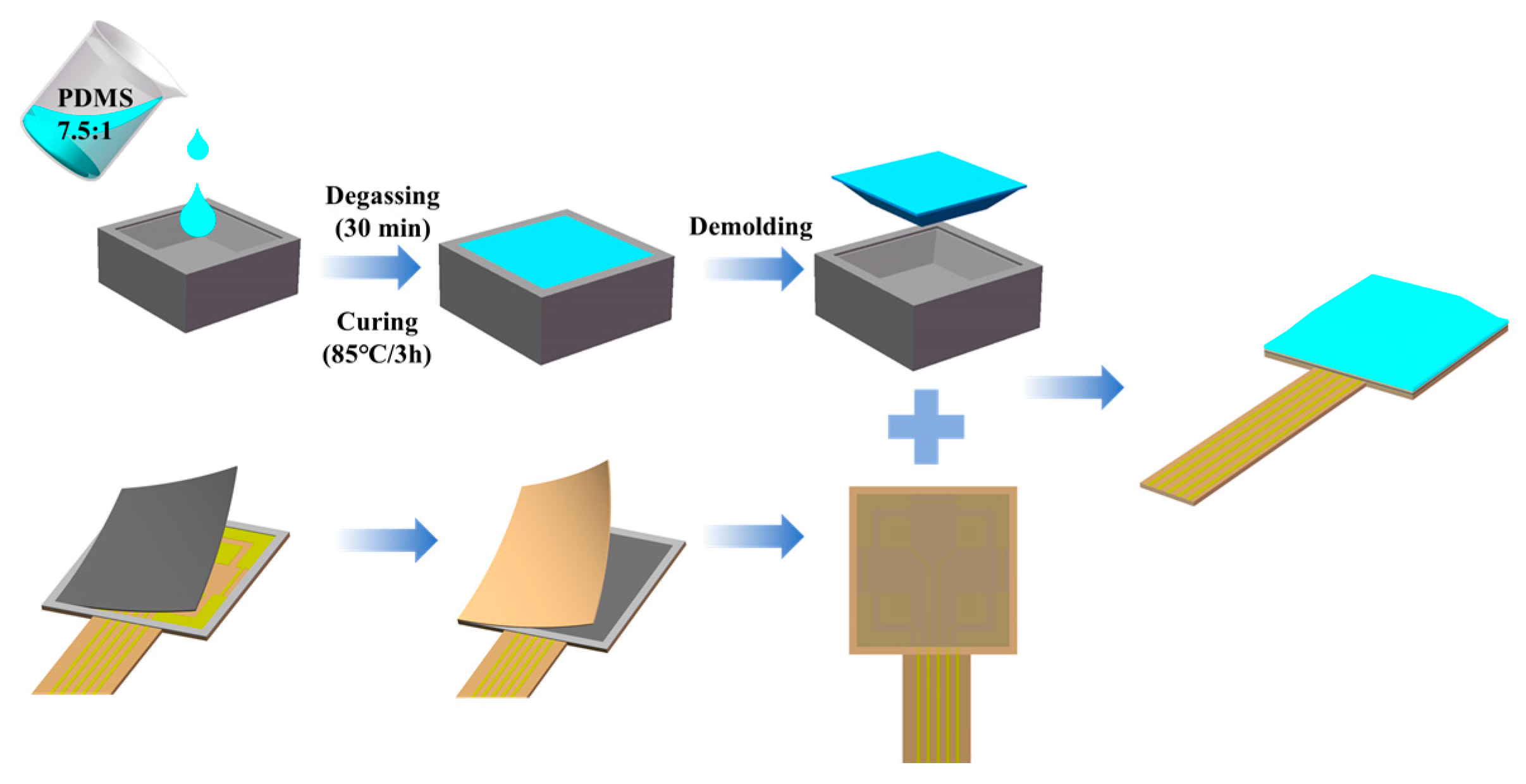
3.3. Fabrication Processes
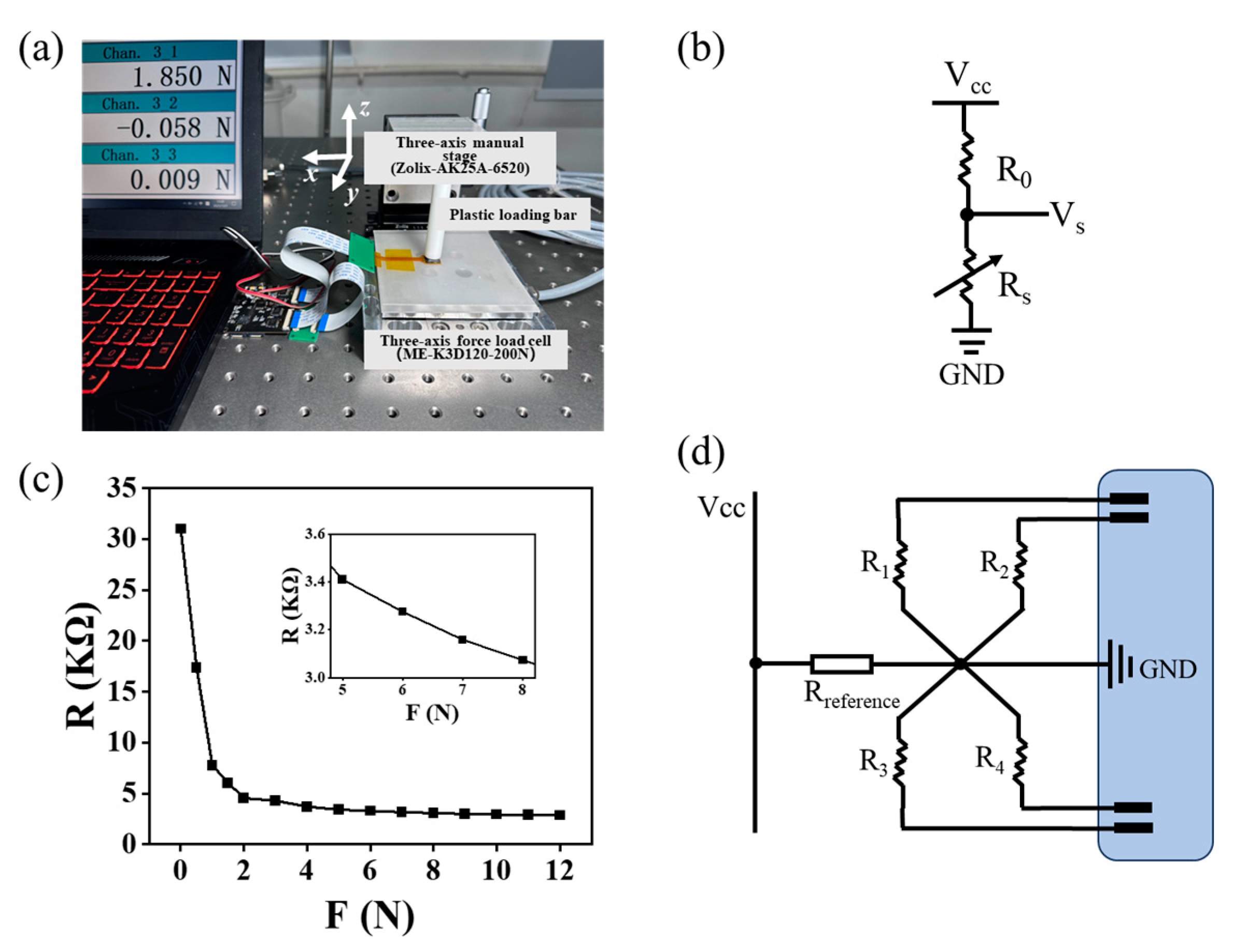
3.4. Experimental Setup
4. Results and Discussion
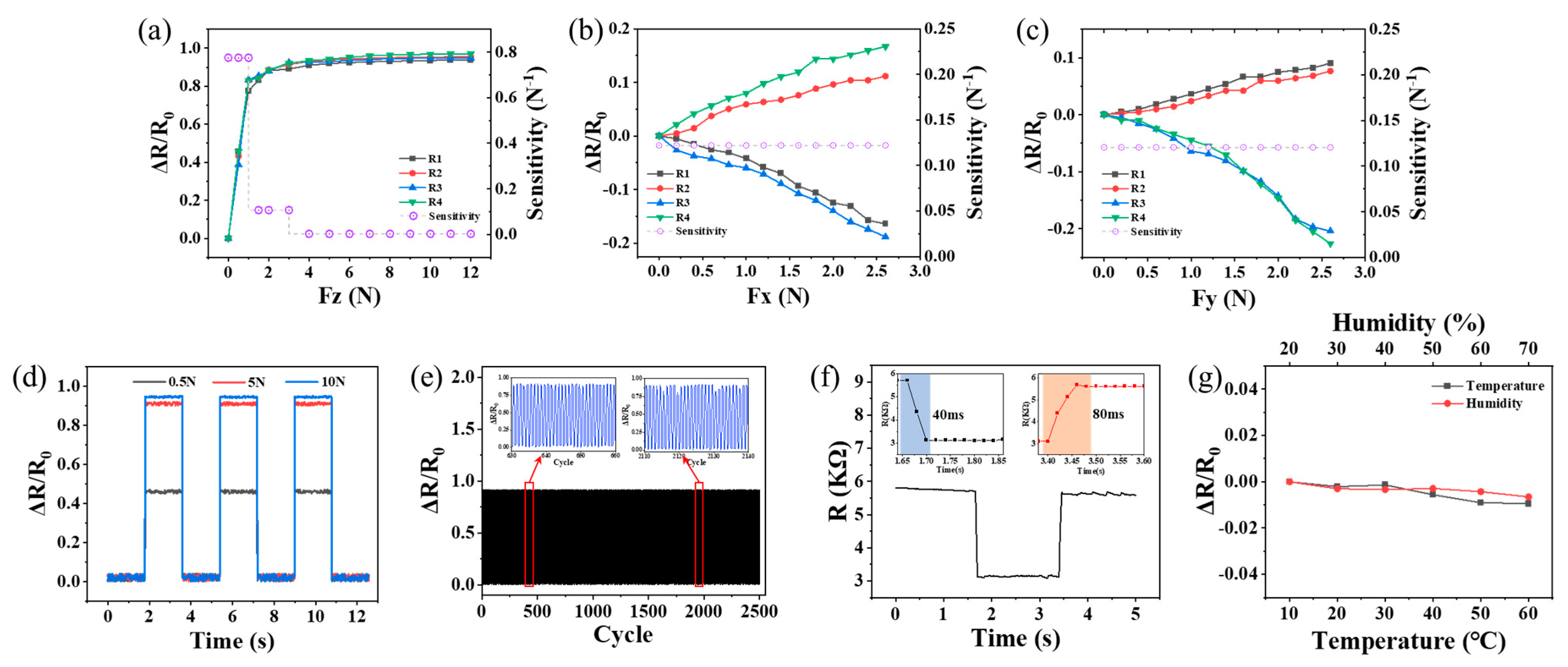
4.1. Dynamic Characteristics
4.2. Calibration and Measurement of Three-Dimensional Force
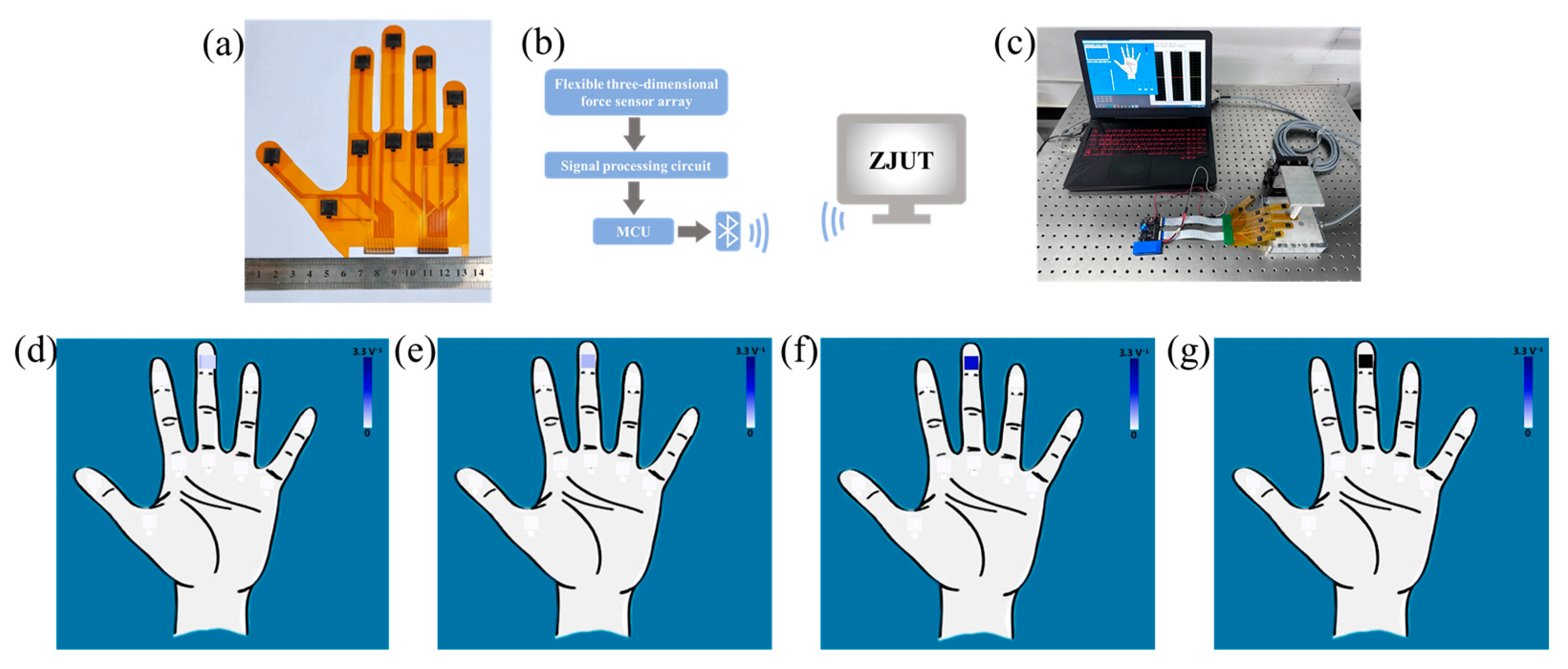
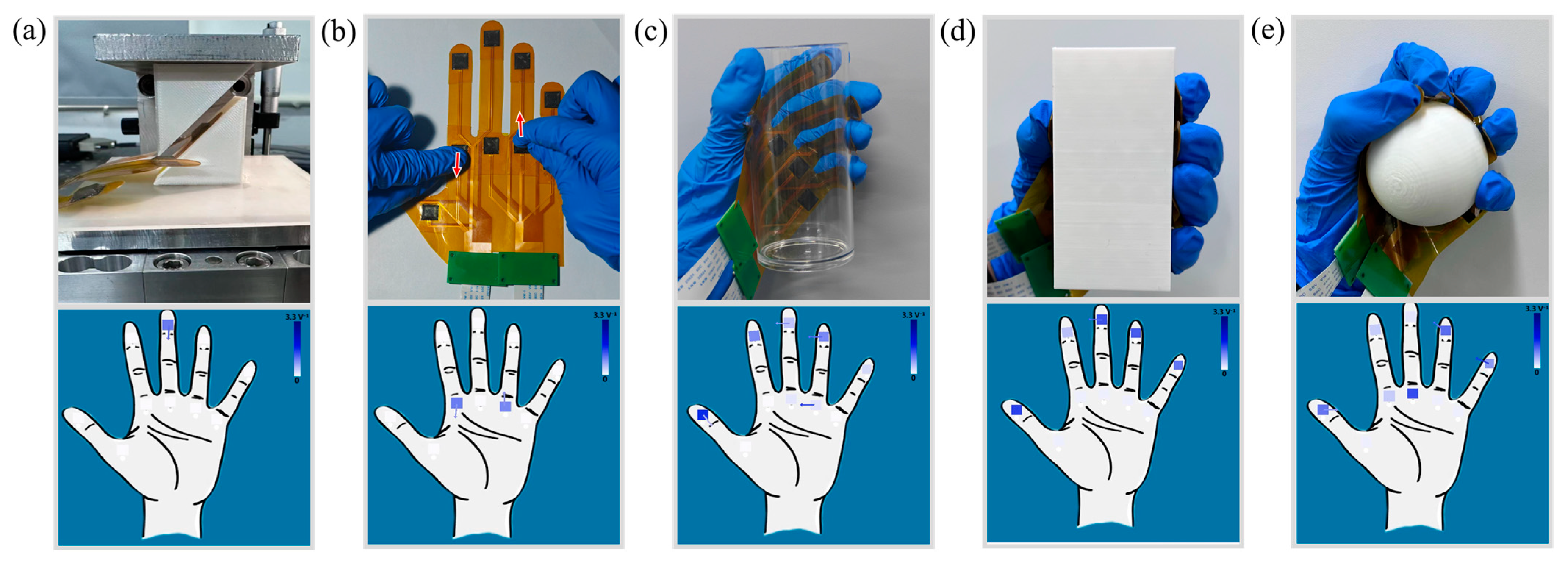
4.3. Glove-like Sensor Array for Sensing Contact Force
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, P.; Li, Q.; Sun, Y.; Gong, J.; Zhang, J. A braided construction of ionogels as a wearable sensor for human motion monitoring. Sens. Actuators A Phys. 2023, 364, 114794. [Google Scholar] [CrossRef]
- Yang, R.; Zhang, W.; Tiwari, N.; Yan, H.; Li, T.; Cheng, H. Multimodal sensors with decoupled sensing mechanisms. Adv. Sci. 2022, 9, 2202470. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Wang, C.; Wang, H.; Jian, M.; Hao, X.; Zhang, Y. Carbonized cotton fabric for high-performance wearable strain sensors. Adv. Funct. Mater. 2017, 27, 1604795. [Google Scholar] [CrossRef]
- Wang, Y.; Duan, S.; Liu, J.; Zhao, F.; Chen, P.; Shi, Q.; Wu, J. Highly-sensitive expandable microsphere-based flexible pressure sensor for human–machine interaction. J. Micromech. Microeng. 2023, 33, 115009. [Google Scholar] [CrossRef]
- Yin, Y.; Wang, Y.; Li, H.; Xu, J.; Zhang, C.; Li, X.; Cao, J.; Feng, H.; Zhu, G. A flexible dual parameter sensor with hierarchical porous structure for fully decoupled pressure–temperature sensing. Chem. Eng. J. 2022, 430, 133158. [Google Scholar] [CrossRef]
- Boutry, C.M.; Negre, M.; Jorda, M.; Vardoulis, O.; Chortos, A.; Khatib, O.; Bao, Z. A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics. Sci. Robot. 2018, 3, eaau6914. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Chen, L.; Chen, J.; Chang, X.; Zhu, Y. Flexible and transparent pressure/temperature sensors based on ionogels with bioinspired interlocked microstructures. ACS Appl. Mater. Interfaces 2021, 14, 2122–2131. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Liu, J.; Wei, J.; Yang, Z.; Ren, C.; Li, B. Recent progress of conductive hydrogel fibers for flexible electronics: Fabrications, applications, and perspectives. Adv. Funct. Mater. 2023, 33, 2213485. [Google Scholar] [CrossRef]
- Chen, S.; Bai, C.; Zhang, C.; Geng, D.; Liu, R.; Xie, Y.; Zhou, W. Flexible piezoresistive three-dimensional force sensor based on interlocked structures. Sens. Actuators A Phys. 2021, 330, 112857. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, L.J.; Zhang, H.M.; Zhao, Z.X.; Dong, S.L.; Wei, S.; Zhao, J.; Wang, Z.; Guo, B.; Hu, P.A. Highly sensitive flexible three-axis tactile sensors based on the interface contact resistance of microstructured graphene. Nanoscale 2018, 10, 7387–7395. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Hu, Z.; Yang, Z.; Yuan, W.; Song, C.; Pan, J.; Shen, Y. Soft magnetic skin for super-resolution tactile sensing with force self-decoupling. Sci. Robot. 2021, 6, eabc8801. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Cui, S.; Wei, J.; Li, H.; Hu, J.; Chen, S.; Chen, Y.; Wang, S.; Feng, X. Centrosymmetric- and axisymmetric-patterned flexible tactile sensor for roughness and slip intelligent recognition. Adv. Intell. Syst. 2022, 4, 2100072. [Google Scholar] [CrossRef]
- Mo, Y.; Han, H.; Liu, Y.; Wang, X.; Hu, D.; Zhan, J.; Wang, Y. A tactile sensor based on piezoresistive effect and electromagnetic induction. Sens. Actuators A Phys. 2022, 344, 113716. [Google Scholar] [CrossRef]
- Sun, X.; Sun, J.; Li, T.; Zheng, S.; Wang, C.; Tan, W.; Zhang, J.; Liu, C.; Ma, T.; Qi, Z.; et al. Flexible tactile electronic skin sensor with 3D force detection based on porous CNTs/PDMS nanocomposites. Nano-Micro Lett. 2019, 11, 57. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Chen, X.; Chu, K.; Wang, X.; Hu, Z.; Su, H. Carbon black/PDMS based flexible capacitive tactile sensor for multi-directional force sensing. Sensors 2022, 22, 628. [Google Scholar] [CrossRef] [PubMed]
- Wu, D.; Cheng, X.; Chen, Z.; Xu, Z.; Zhu, M.; Zhao, Y.; Zhu, R.; Lin, L. A flexible tactile sensor that uses polyimide/graphene oxide nanofiber as dielectric membrane for vertical and lateral force detection. Nanotechnology 2022, 33, 405205. [Google Scholar] [CrossRef]
- Oh, H.; Yi, G.C.; Yip, M.; Dayeh, S.A. Scalable tactile sensor arrays on flexible substrates with high spatiotemporal resolution enabling slip and grip for closed-loop robotics. Sci. Adv. 2020, 6, eabd7795. [Google Scholar] [CrossRef] [PubMed]
- Meng, H.; Zhu, W.; Zhou, L.; Qian, X.; Bao, G. A 3-D force sensor based on combination of magnetic and piezoresistive transduction. IEEE Sens. J. 2022, 22, 3595–3604. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, X.; Mei, D.; Zhu, L.; Chen, J. Flexible tactile sensor array for distributed tactile sensing and slip detection in robotic hand grassing. Sens. Actuators A Phys. 2019, 297, 111512. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, J.; Mei, D. Flexible tactile sensor array for slippage and grooved surface recognition in sliding movement. Micromachines 2019, 10, 579. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, Q.; Ren, W.; Song, Y.; Luo, H.; Han, Y.; He, L.; Wu, L.; Wu, X.; Wang, Z. Bioinspired tactile sensation based on synergistic microcrack-bristle structure design towards high mechanical sensitivity and direction-resolving capability. Research 2023, 6, 0172. [Google Scholar] [CrossRef]
- Chen, H.; Jing, Y.; Lee, J.H.; Liu, D.; Kim, J.; Chen, S.; Huang, K.; Shen, X.; Zheng, Q.; Yang, J.; et al. Human skin-inspired integrated multidimensional sensors based on highly anisotropic structures. Mater. Horiz. 2020, 7, 2378–2389. [Google Scholar] [CrossRef]
- Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible piezoelectric tactile sensor array for dynamic three-axis force measurement. Sensors 2016, 16, 819. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Zhang, R.; Ji, C.; Pei, Z.; Fu, Z.; Liu, Y.; Sang, S.; Hao, R.; Zhang, Q. Bioinspired crocodile skin-based flexible piezoelectric sensor for three-dimensional force detection. IEEE Sens. J. 2023, 28, 21050–21060. [Google Scholar] [CrossRef]
- Chen, X.; Shao, J.; Tian, H.; Li, X.; Tian, Y.; Wang, C. Flexible three-axial tactile sensors with microstructure-enhanced piezoelectric effect and specially-arranged piezoelectric arrays. Smart Mater. Struct. 2018, 27, 025018. [Google Scholar] [CrossRef]
- Liu, Y.; Wo, H.; Huang, S.; Huo, Y.; Xu, H.; Zhan, S.; Li, M.; Zeng, X.; Jin, H.; Zhang, L.; et al. A flexible capacitive 3D tactile sensor with cross-shaped capacitor plate pair and composite structure dielectric. IEEE Sens. J. 2020, 21, 1378–1385. [Google Scholar] [CrossRef]
- Nie, B.; Geng, J.; Yao, T.; Miao, Y.; Zhang, Y.; Chen, X.; Liu, J. Sensing arbitrary contact forces with a flexible porous dielectric elastomer. Mater. Horiz. 2021, 8, 962–971. [Google Scholar] [CrossRef]
- Xu, D.; Hu, B.; Zheng, G.; Wang, J.; Li, C.; Zhao, Y.; Yan, Z.; Jiao, Z.; Wu, Y.; Wang, M.; et al. Sandwich-like flexible tactile sensor based on bioinspired honeycomb dielectric layer for three-axis force detection and robotic application. J. Mater. Sci. Mater. Electron. 2023, 34, 942. [Google Scholar] [CrossRef]
- Wang, Z.; Bu, T.; Li, Y.; Wei, D.; Tao, B.; Yin, Z.; Zhang, C.; Wu, H. Multidimensional force sensors based on triboelectric nanogenerators for electronic skin. ACS Appl. Mater. Interfaces 2021, 13, 56320–56328. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Xi, Y.; Wang, E.; Qu, X.; Yang, Y.; Fan, Y.; Shi, B. Self-powered force sensors for multidimensional tactile sensing. ACS Appl. Mater. Interfaces 2022, 14, 20122–20131. [Google Scholar] [CrossRef] [PubMed]
- Ren, Z.; Nie, J.; Shao, J.; Lai, Q.; Wang, L.; Chen, J.; Chen, X.; Wang, Z.L. Fully elastic and metal-free tactile sensors for detecting both normal and tangential forces based on triboelectric nanogenerators. Adv. Funct. Mater. 2018, 28, 1802989. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.; Kim, J.J.; Wang, C.; Wang, Y.; Wang, B.; Lee, S.; Yokota, T.; Someya, T. An optical-based multipoint 3-axis pressure sensor with a flexible thin-film form. Sci. Adv. 2023, 9, eadi2445. [Google Scholar] [CrossRef] [PubMed]
- Bhar, I.; Nirupama, M. Design of a wireless passive pressure measurement system using piezoresistive materials. IEEE Sens. J. 2022, 22, 21518–21526. [Google Scholar] [CrossRef]
- Al-Ghabban, A.; Sattar, M.; Nabeel, K.; Abid, A.; Muhammed, A. The behaviour of different design of flexible force sensor based velostat during implementation of static load with different contact area. Period. Eng. Nat. Sci. 2022, 10, 65–73. [Google Scholar] [CrossRef]
- Sundaram, S.; Kellnhofer, P.; Li, Y.; Zhu, J.Y.; Torralba, A.; Matusik, W. Learning the signatures of the human grasp using a scalable tactile glove. Nature 2019, 569, 698–702. [Google Scholar] [CrossRef] [PubMed]
- Giovanelli, D.; Elisabetta, F. Force sensing resistor and evaluation of technology for wearable body pressure sensing. J. Sens. 2016, 2016, 9391850. [Google Scholar] [CrossRef]
- Tihak, A.; Bošković, D. Experimental evaluation of challenges in designing a resistive pressure sensors. In Proceedings of the IEEE EUROCON 2019-18th International Conference on Smart Technologies, Novi Sad, Serbia, 1–4 July 2019. [Google Scholar]
- Ahmad, J.; Henrik, A.; Johan, S. Screen-printed piezoresistive sensors for monitoring pressure distribution in wheelchair. IEEE Sens. J. 2018, 19, 2055–2063. [Google Scholar] [CrossRef]
- Katunin, A.; Katarzyna, K. Electrical percolation in composites of conducting polymers and dielectrics. J. Polym. Eng. 2015, 35, 731–741. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Volume Resistivity Ω·cm | Surface Resistivity kΩ/cm2 | Operating Temperature Range °C | Thickness μm |
|---|---|---|---|
| ≤500 | ≤31 | −45–65 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zeng, J.; Wang, Y.; Jiang, G. Flexible Three-Dimensional Force Tactile Sensor Based on Velostat Piezoresistive Films. Micromachines 2024, 15, 486. https://doi.org/10.3390/mi15040486
Zhang Y, Zeng J, Wang Y, Jiang G. Flexible Three-Dimensional Force Tactile Sensor Based on Velostat Piezoresistive Films. Micromachines. 2024; 15(4):486. https://doi.org/10.3390/mi15040486
Chicago/Turabian StyleZhang, Yuanxiang, Jiantao Zeng, Yong Wang, and Guoquan Jiang. 2024. "Flexible Three-Dimensional Force Tactile Sensor Based on Velostat Piezoresistive Films" Micromachines 15, no. 4: 486. https://doi.org/10.3390/mi15040486
APA StyleZhang, Y., Zeng, J., Wang, Y., & Jiang, G. (2024). Flexible Three-Dimensional Force Tactile Sensor Based on Velostat Piezoresistive Films. Micromachines, 15(4), 486. https://doi.org/10.3390/mi15040486