
Development of Second Prototype of Twin-Driven Magnetorheological Fluid Actuator for Haptic Device


Abstract
1. Introduction
2. Structure and Design of Twin-Driven MR Fluid Actuator
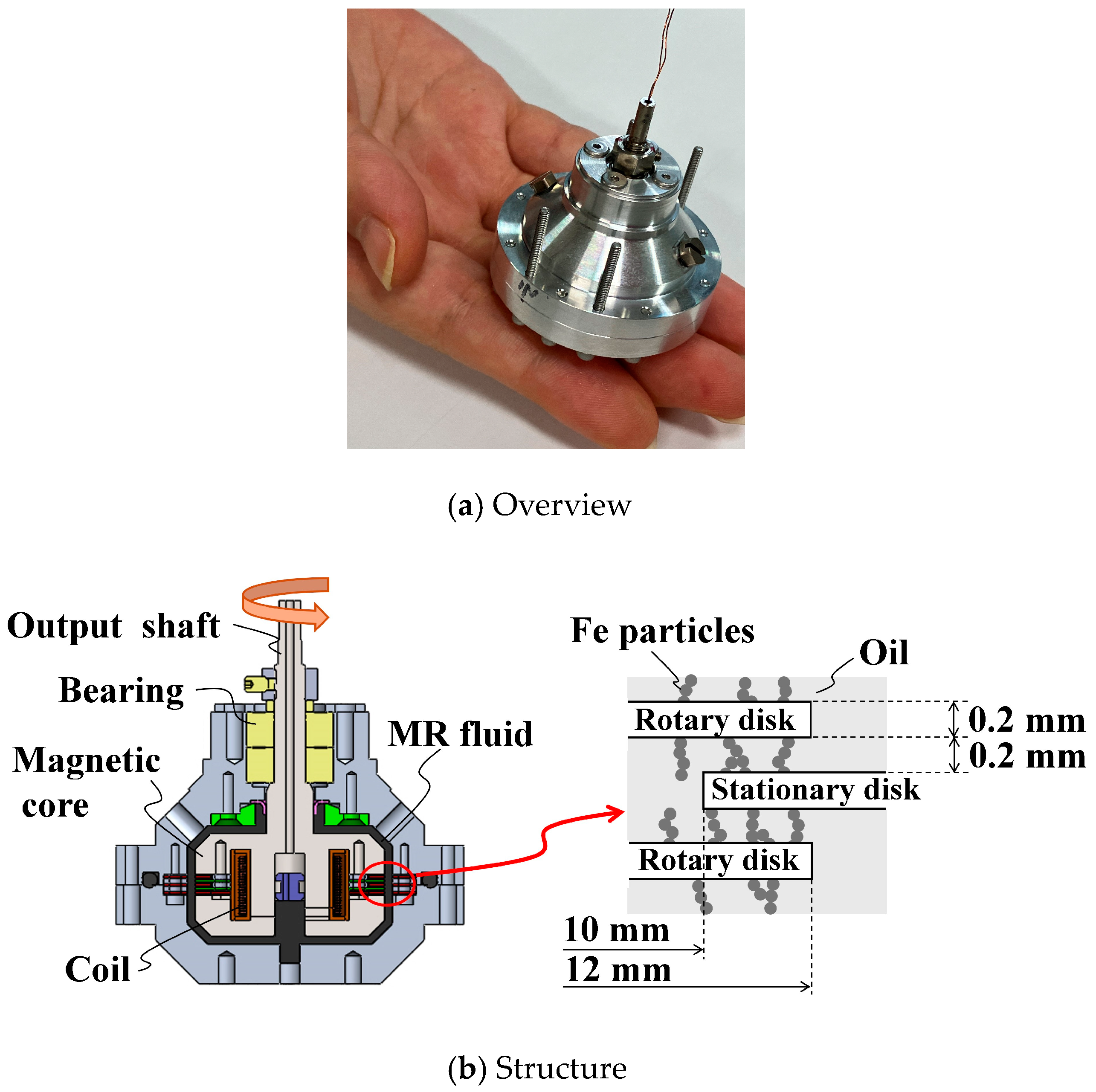
2.1. Development of H-MRC
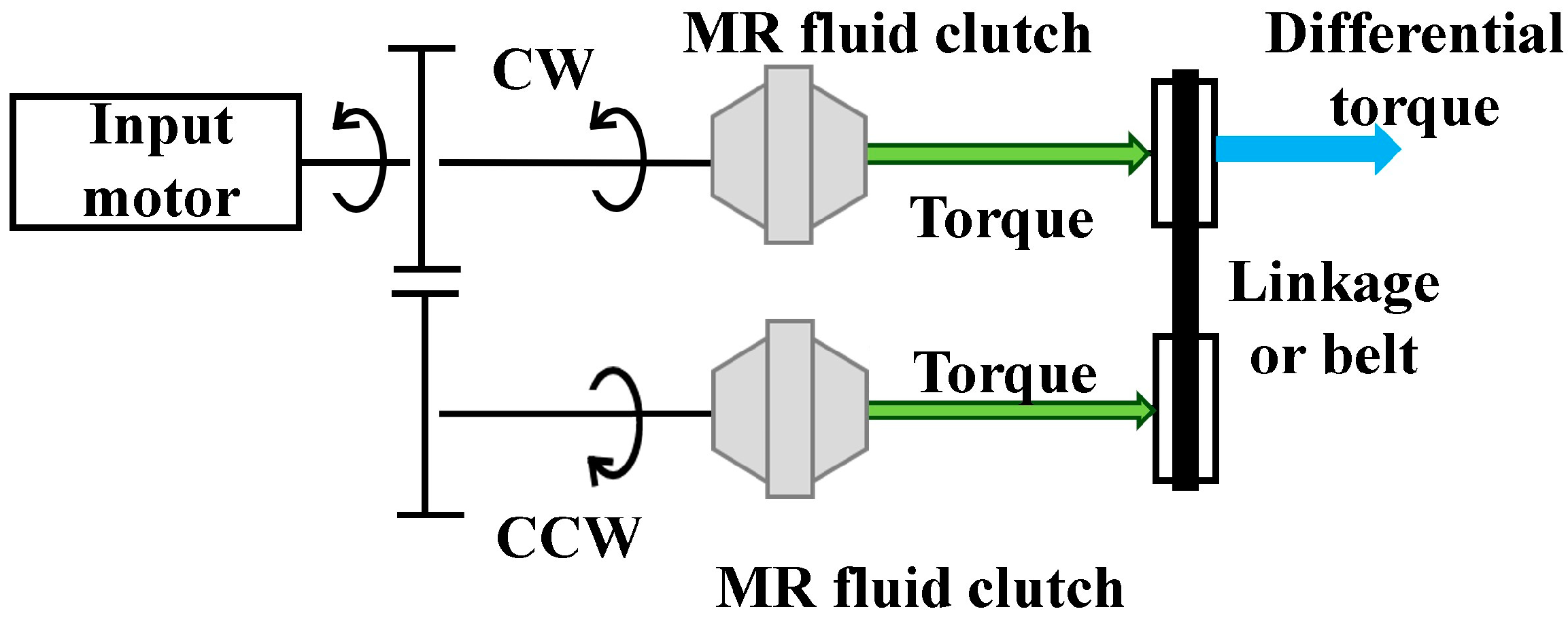
2.2. Basic Structure of TD-MRA and First Prototype
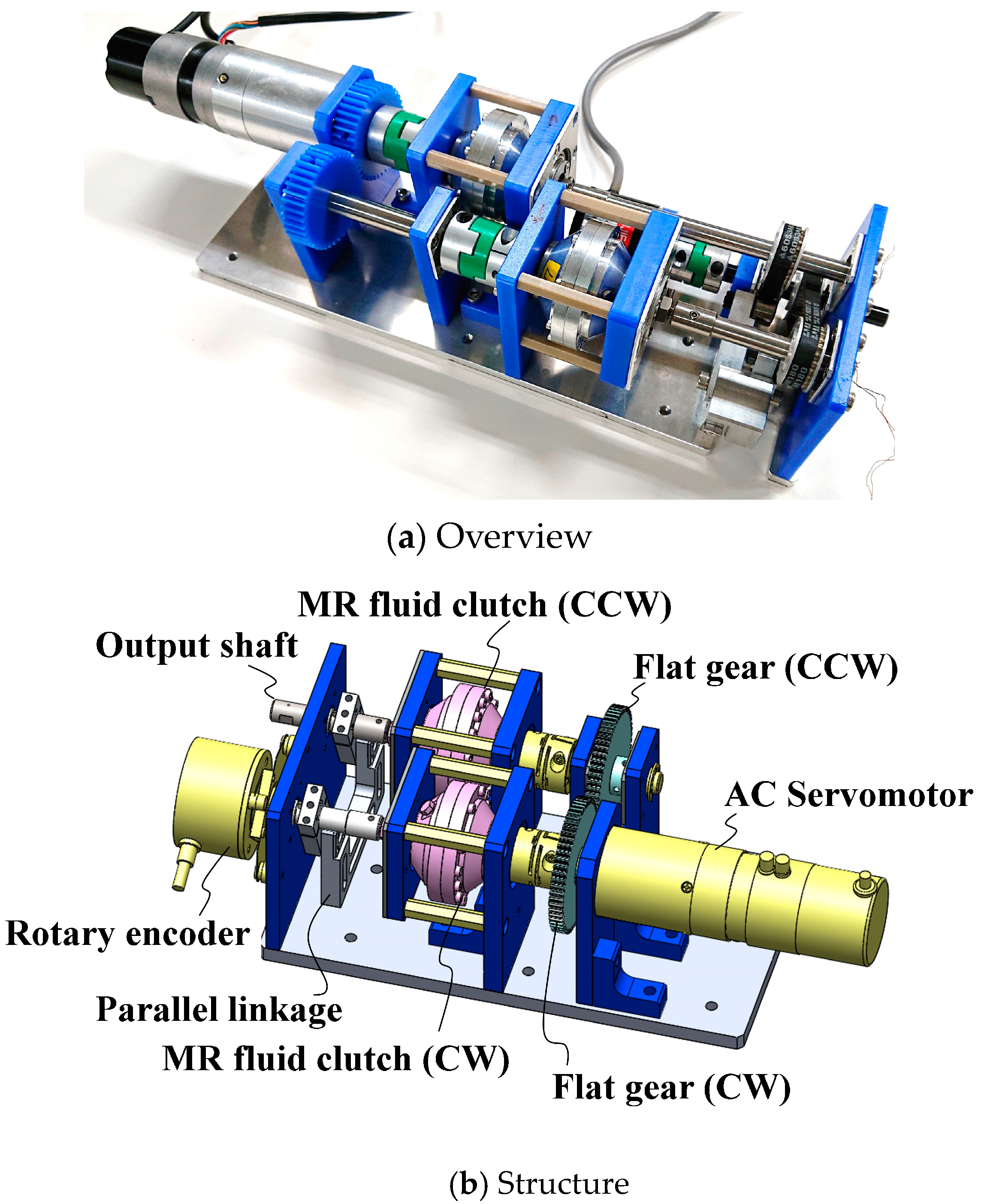
2.3. Development of the Second Prototype
3. Method for Torque Control Performance Evaluation
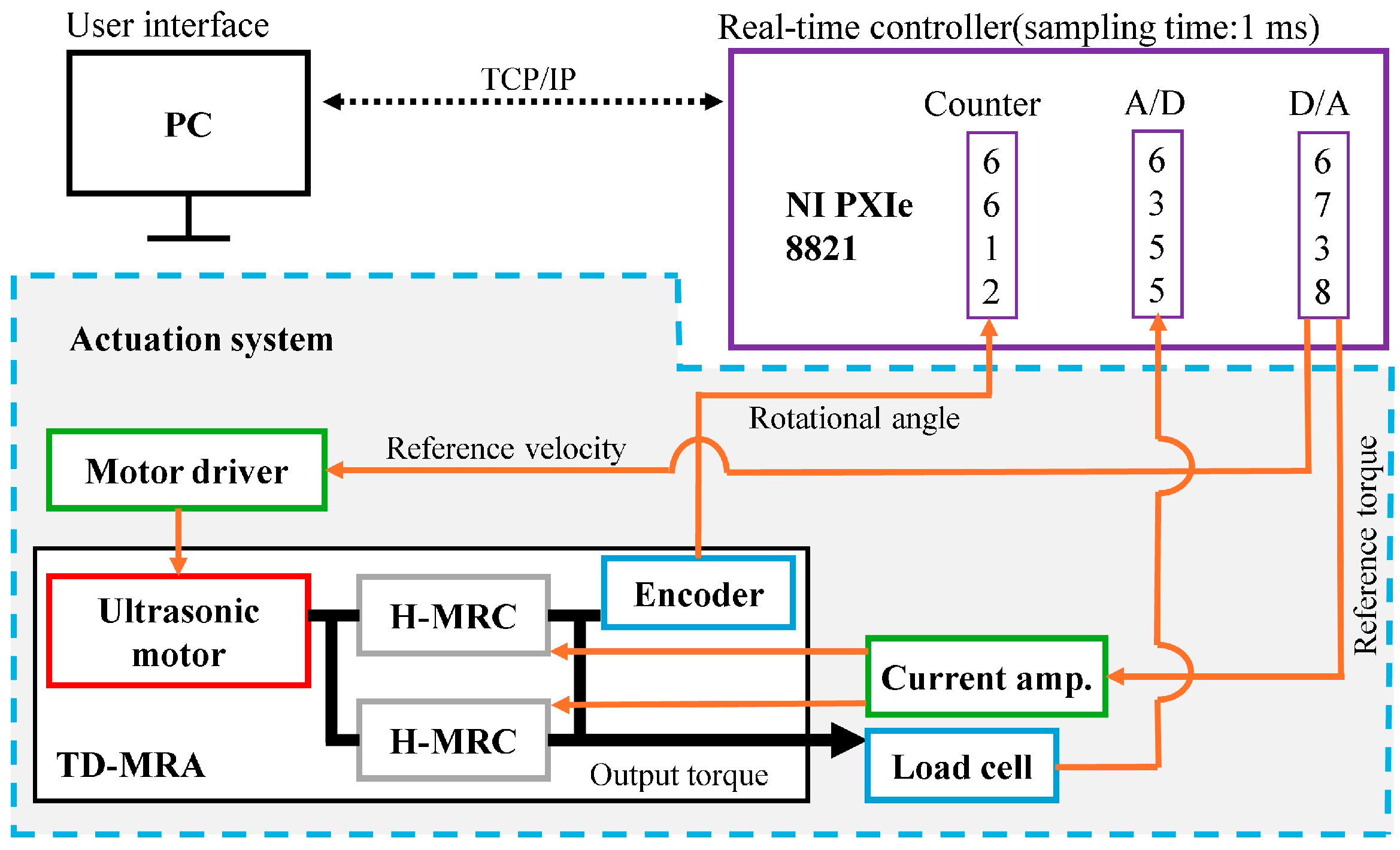
3.1. Measurement Setup
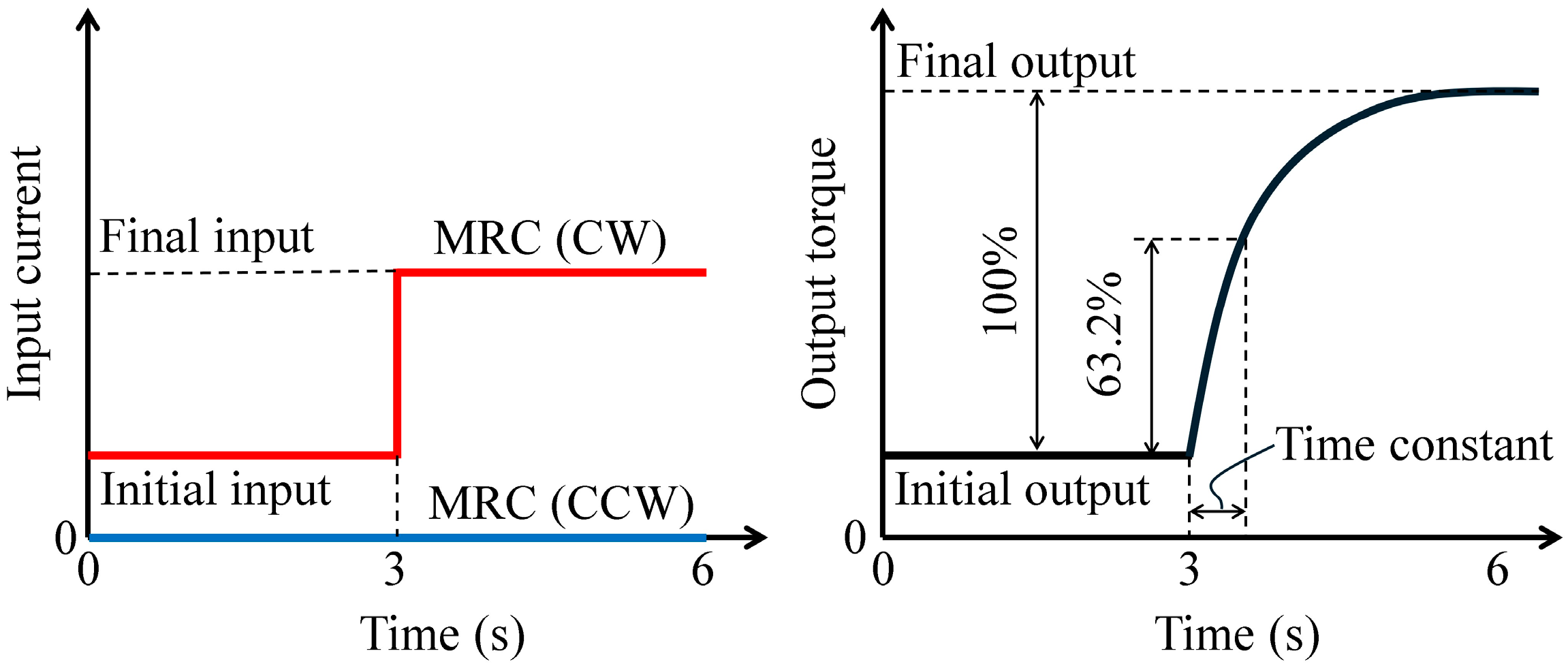
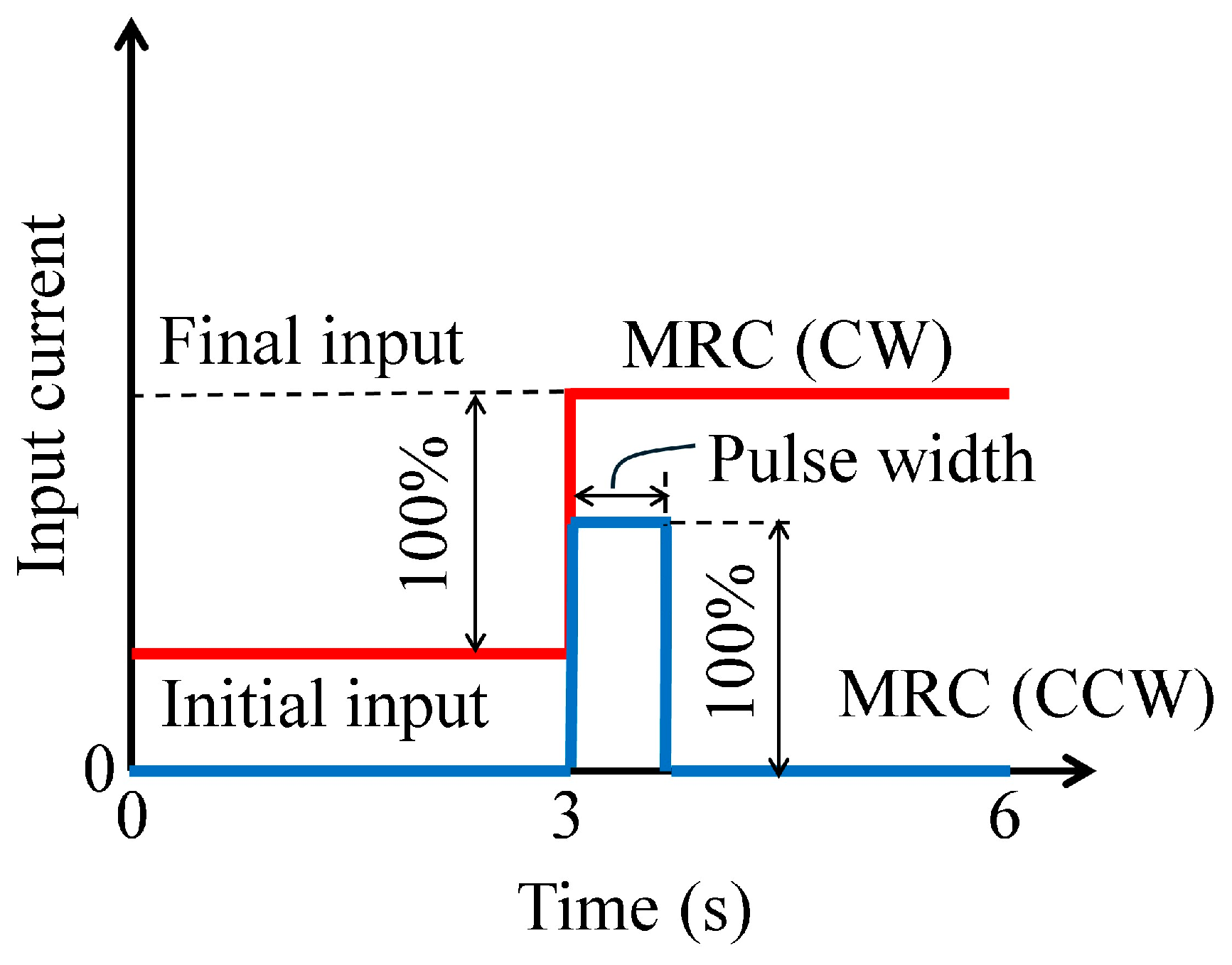
3.2. Experimental Conditions and Analytic Method
- Static test (constant current input),
- Dynamic test (stepwise current input).
4. Results
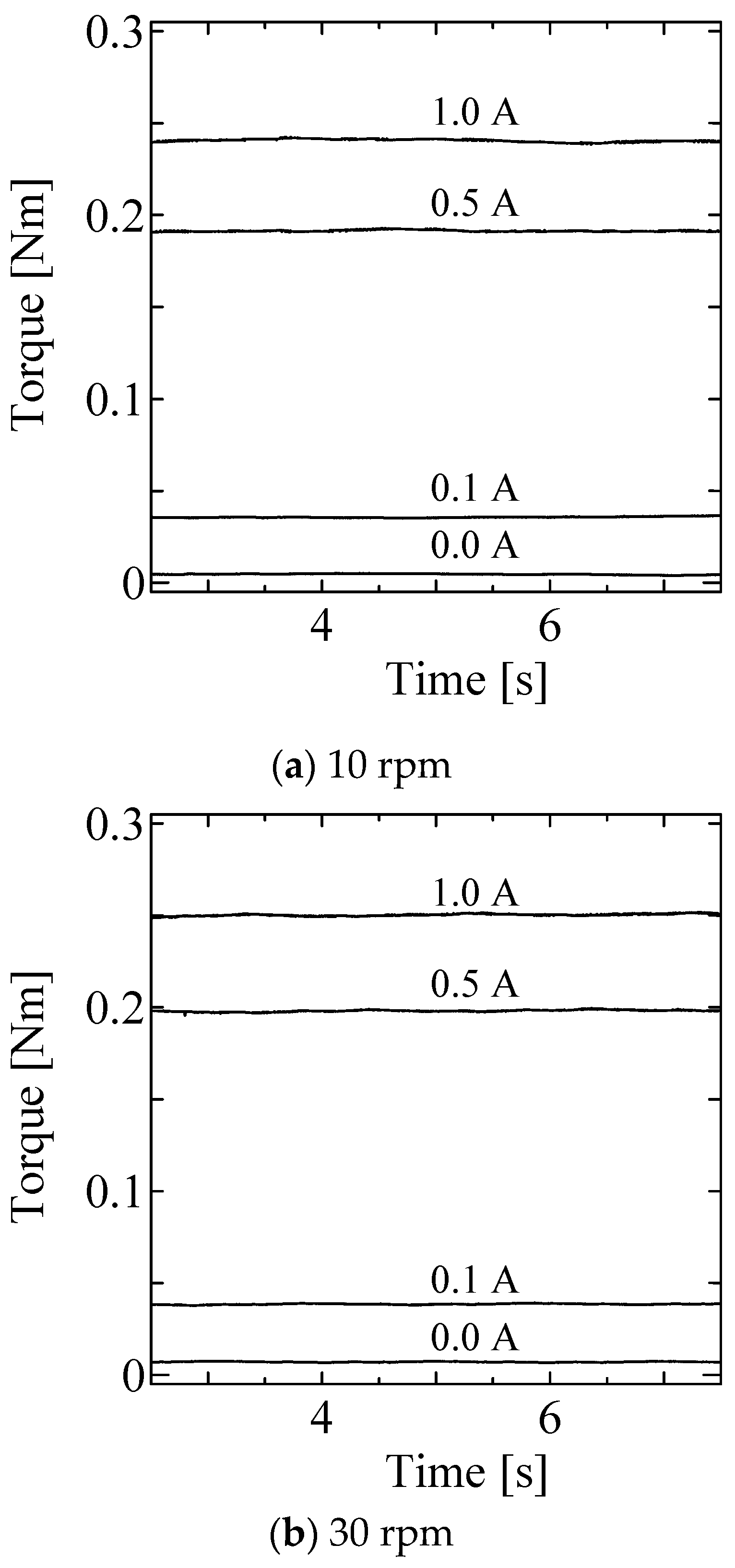
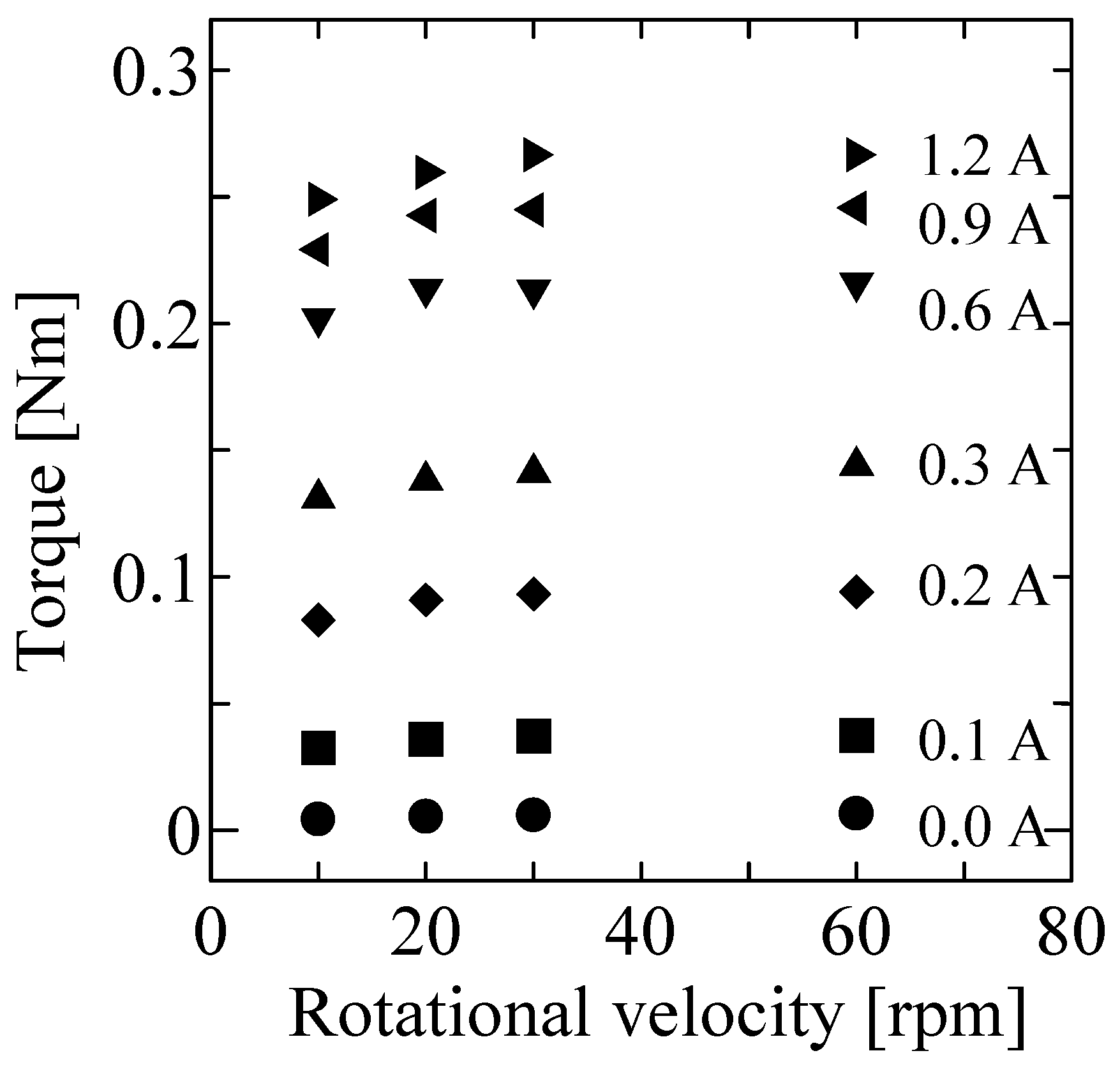
4.1. Static Test
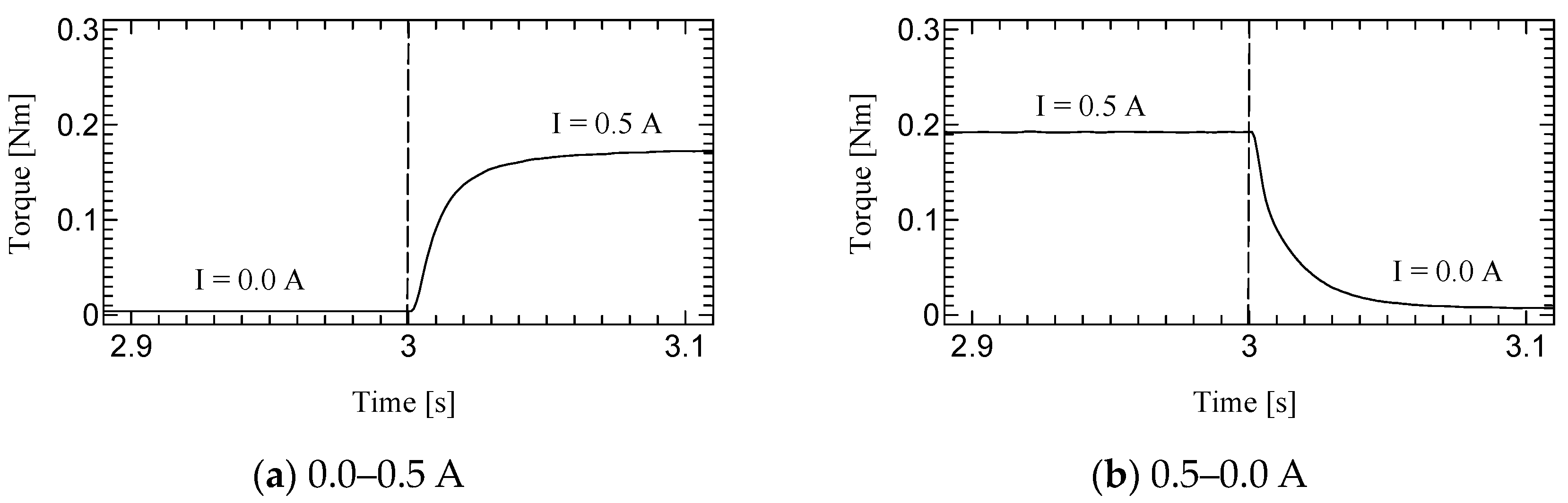
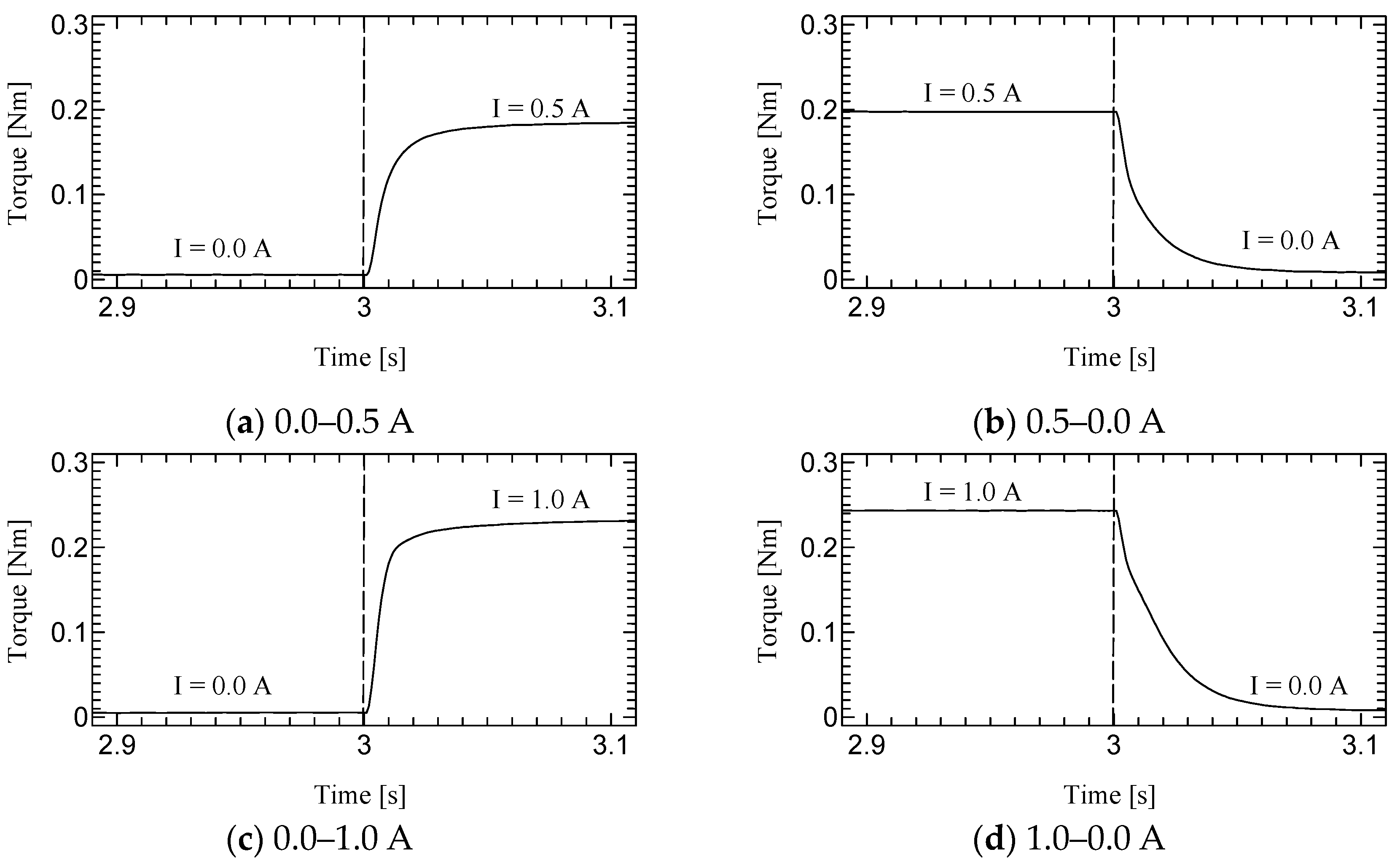
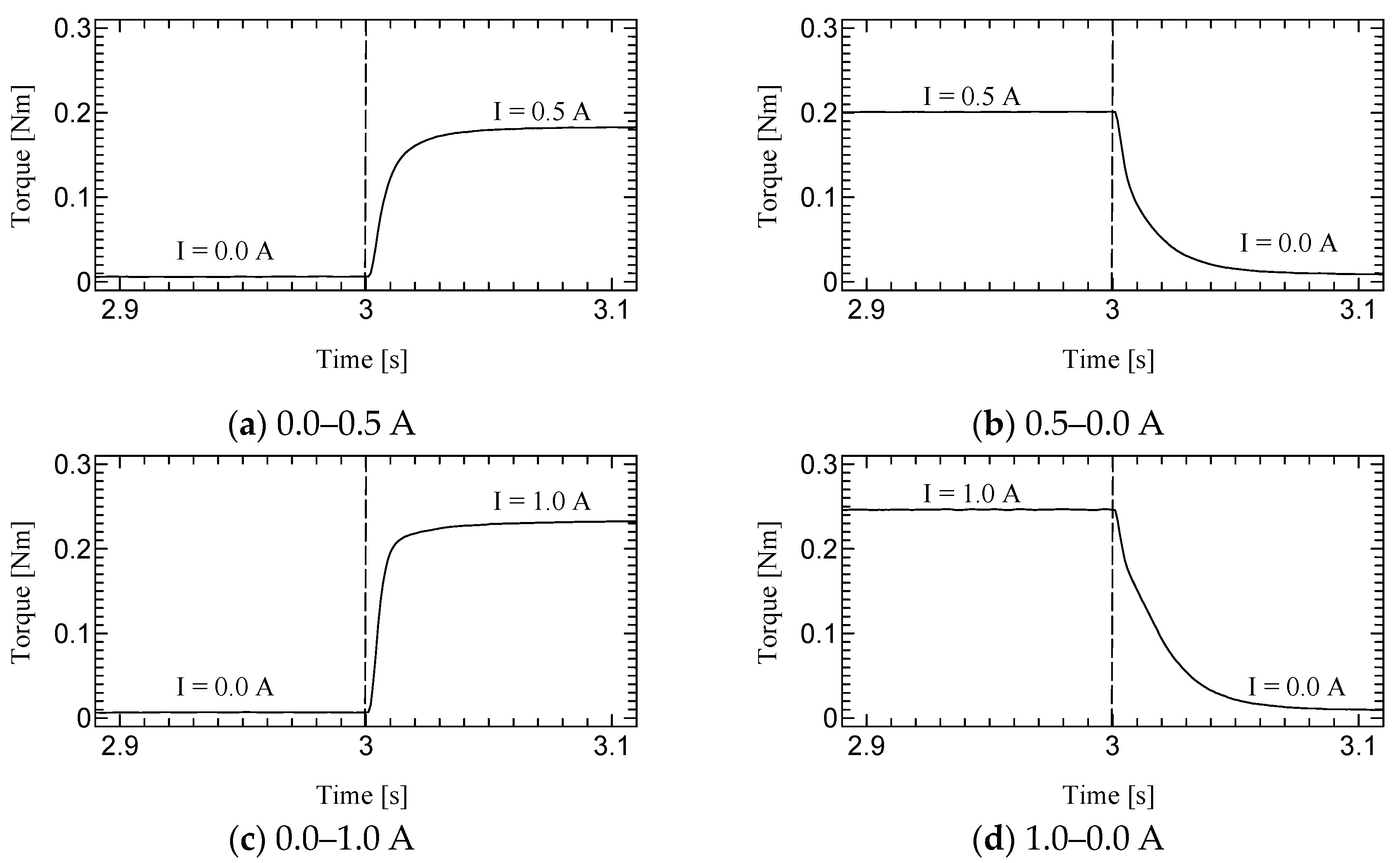
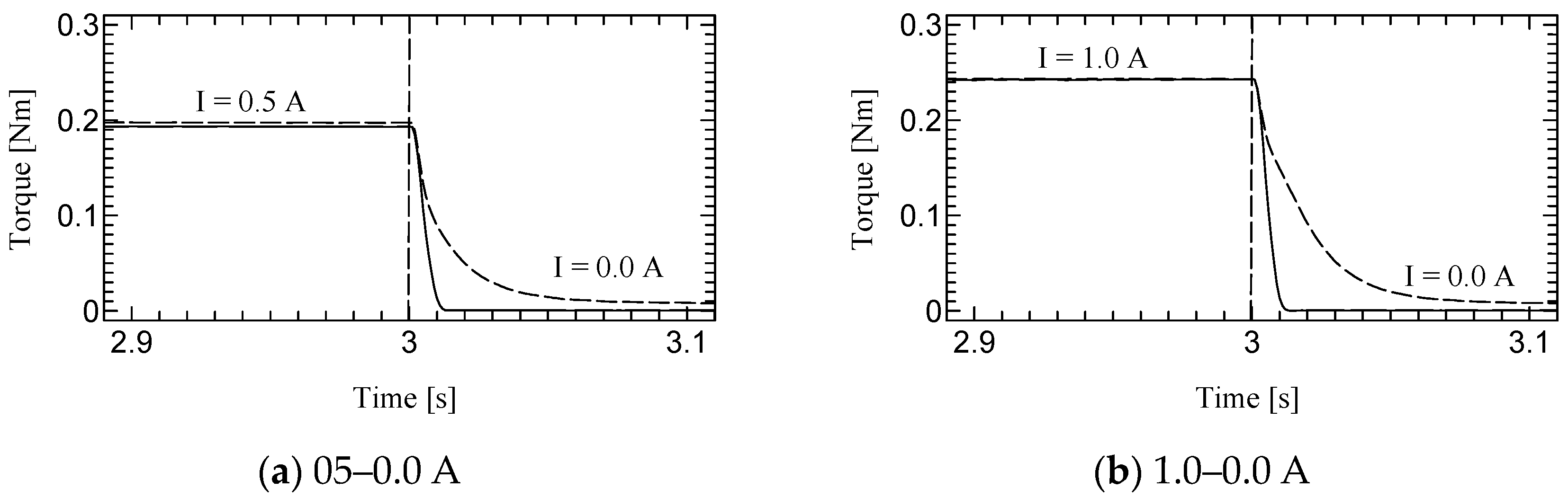
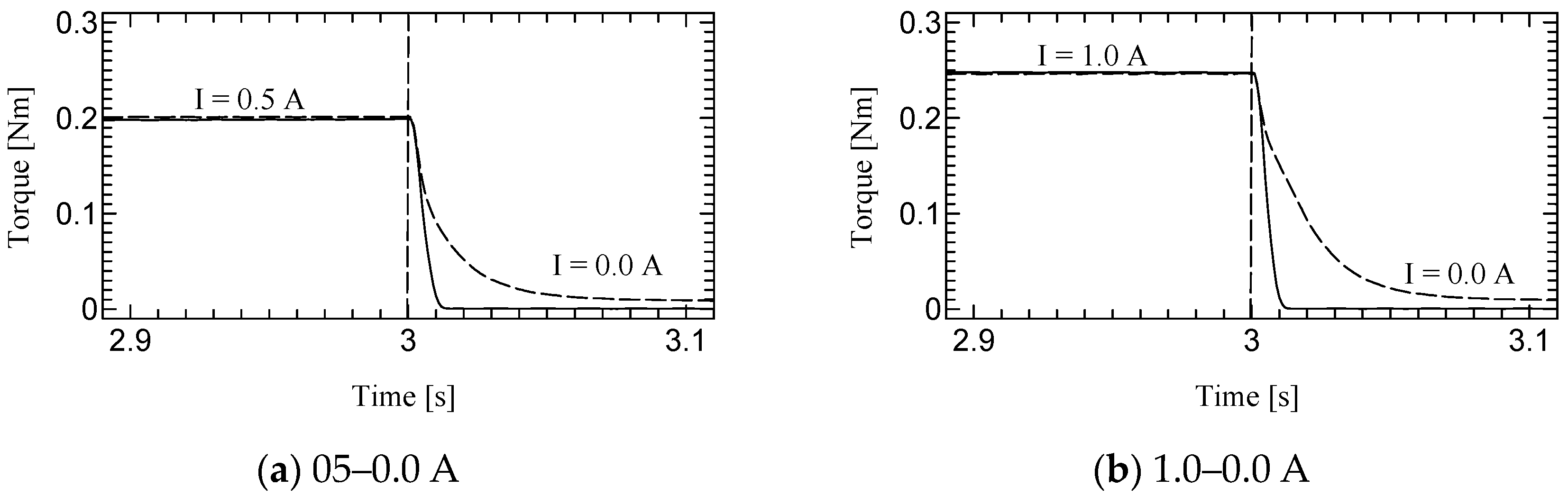
4.2. Dynamic Test
5. Discussion
5.1. Static Test
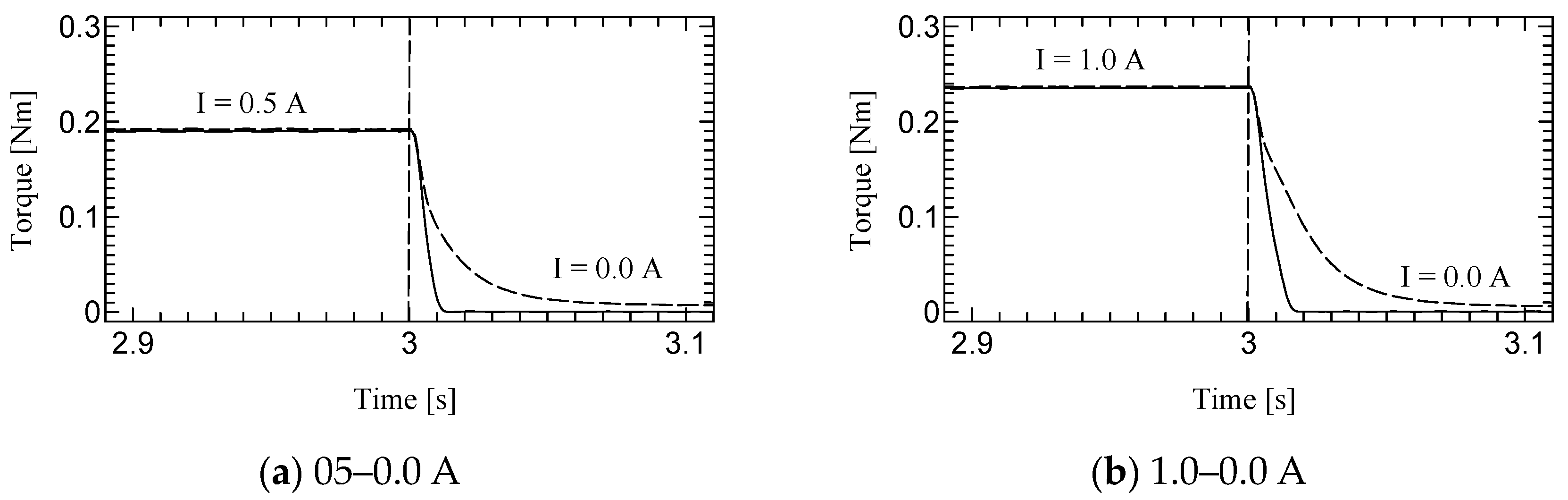
5.2. Dynamic Test
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hannaford, B. A design framework for teleoperators with kinesthetic feedback. IEEE Trans. Robot. Autom. 1989, 5, 426–434. [Google Scholar] [CrossRef]
- Yokokohji, Y.; Yoshikawa, T. Bilateral control of master–slave manipulators for ideal kinesthetic coupling-formulation and experiment. IEEE Trans. Robot. Autom. 1994, 10, 605–620. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, S.; Hasegawa, S.; Okugawa, M. Remote Control System of Disaster Response Robot with Passive Sub-crawlers Considering Falling down Avoidance. ROBOMECH J. 2014, 1, 20. [Google Scholar] [CrossRef]
- Schwarz, M.; Rodehutskors, T.; Droeschel, D.; Beul, M.; Schreiber, M.; Araslanov, N.; Ivanov, I.; Lenz, C.; Razlaw, J.; Schüller, S.; et al. Nimbro Rescue: Solving Disaster-Response Tasks with the Mobile Manipulation Robot Momaro. J. Field Robot. 2017, 34, 400–425. [Google Scholar] [CrossRef]
- Doniec, M.; Detweiler, C.; Vasilescu, I.; Rus, D. Using Optical Communication for Remote Underwater Robot Operation. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4017–4022. [Google Scholar] [CrossRef]
- García, J.C.; Patrão, B.; Almeida, L.; Perez, J.; Menezes, P.; Dias, J.; Sanz, P.J. A Natural Interface for Remote Operation of Underwater Robots. IEEE Comput. Graph. Appl. 2017, 37, 34–43. [Google Scholar] [CrossRef]
- Simorov, A.; Otte, R.S.; Kopietz, C.M.; Oleynikov, D. Review of Surgical Robotics User Interface: What Is the Best Way to Control Robotic Surgery? Surg. Endosc. 2012, 26, 2117–2125. [Google Scholar] [CrossRef]
- Siciliano, B.; Khatib, O. Handbook of Robotics, 2nd ed.; Section 43; Telerobotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1085–1108. [Google Scholar]
- Tavakoli, M.; Aziminejad, A.; Patel, R.; Moallem, M. High-fidelity bilateral teleoperation systems and the effect of multimodal haptics. IEEE Trans. Syst. Man Cybern. Part. B Cybern. 2007, 37, 1512–1528. [Google Scholar] [CrossRef]
- Hiki, N.; Honda, M.; Etoh, T.; Yoshida, K.; Kodera, Y.; Kakeji, Y.; Kumamaru, H.; Miyata, H.; Yamashita, Y.; Inomata, M.; et al. Higher indicate of pancreatic fistula in laparoscopic gastrectomy. Real-world evidence from a nationwide prospective cohort study. Gastric Cancer 2018, 21, 162–170. [Google Scholar] [CrossRef]
- Uyama, I.; Suda, K.; Nakauchi, M.; Kinoshita, T.; Noshiro, H.; Takiguchi, S.; Ehara, K.; Obama, K.; Kuwabara, S.; Okabe, H.; et al. Clinical advantages of robotics gastrectomy for clinical stage I/II gastric cancer: A multi-institutional prospective single-arm study. Gastric Cancer 2019, 22, 377–385. [Google Scholar] [CrossRef]
- Roberts, W.B.; Tseng, K.; Walsh, P.C.; Han, M. Critical appraisal of management of rectal injury during radical prostatectomy. Urology 2017, 76, 1088–1091. [Google Scholar] [CrossRef]
- Soomro, N.A.; Hashimoto, D.A.; Porteous, A.J.; Ridley CJ, A.; Marsh, W.J.; Ditto, R.; Roy, S. Systematic review of learning curves in robot-assisted surgery. BJS Open 2019, 4, 27–44. [Google Scholar] [CrossRef] [PubMed]
- Stephan, D.; Sälzer, H.; Willeke, F. First Experiences with the New Senhance® Telerobotic System in Visceral Surgery, Visceral Medicine. Visc. Med. 2018, 34, 31–36. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Liu, C.; Poignet, P. A Scaled Bilateral Teleoperation System for Robotic-Assisted Surgery with Time Delay. J. Intell. Robot. Syst. 2019, 95, 165–192. [Google Scholar] [CrossRef]
- Tanaka, H.; Ohnishi, K.; Nishi, H.; Kawai, T.; Morikawa, Y.; Ozawa, S.; Furukawa, T. Implementation of Bilateral Control System Based on Acceleration Control Using FPGA for Multi-Dof Haptic Endoscopic Surgery Robot. IEEE Trans. Ind. Electron. 2009, 56, 618–627. [Google Scholar] [CrossRef]
- Carlson, J.D.; Jolly, M.R. MR Fluid, Foam and Elastomer Devices. Mechatronics 2000, 10, 555–569. [Google Scholar] [CrossRef]
- Kikuchi, T.; Takano, T.; Yamaguchi, A.; Ikeda, A.; Abe, I. Haptic Interface with Twin-Driven MR Fluid Actuator for Teleoperation Endoscopic Surgery System. Actuators 2021, 10, 245. [Google Scholar] [CrossRef]
- Takano, T.; Ikeda, A.; Abe, I.; Kikuchi, T. Improvement of Haptic Interface for Teleoperation Endoscopic Surgery Simulators Using Magnetorheological Fluid Devices. J. Robot. Mechatron. 2022, 34, 1268–1276. [Google Scholar] [CrossRef]
- Liu, G.; Gao, F.; Wang, D.; Liao, W. Medical applications of magnetorheological fluid: A systematic review. Smart Mater. Struct. 2022, 31, 043002. [Google Scholar] [CrossRef]
- Scilingo, E.P.; Bicchi, A.; De Rossi, D.; Scotto, A. A magnetorheological fluid as a haptic display to replicate perceived biological tissues compliance. In Proceedings of the 1st Annual International IEEE-EMBS Special Topic Conference on Microtechnologies in Medicine and Biology, Lyon, France, 12–14 October 2000; pp. 229–333. [Google Scholar]
- Bicchi, A.; Raugi, M.; Rizzo, R.; Sgambelluri, N. Analysis and design of an electromagnetic system for the characterization of magneto-rheological fluids for haptic interfaces. IEEE Trans. Magn. 2005, 41, 1876–1879. [Google Scholar] [CrossRef]
- Scilingo, E.P.; Sgambelluri, N.; De Rossi, D.; Bicchi, A. Towards a haptic black box for free-hand softness and shape exploration. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 2412–2417. [Google Scholar]
- Rizzo, R.; Sgambelluri, N.; Scilingo, E.P.; Raugi, M.; Bicchi, A. Electromagnetic modeling and design of haptic interface prototypes based on magnetorheological fluids. IEEE Trans. Magn. 2007, 43, 3586–3600. [Google Scholar] [CrossRef]
- Liu, Y.; Davidson, R.; Taylor, P.; Ngu, J.; Zarraga, J. Single cell magnetorheological fluid based tactile display. Displays 2005, 26, 29–35. [Google Scholar] [CrossRef]
- Lee, C.; Jang, M. Virtual surface characteristics of a tactile display using magneto-rheological fluids. Sensors 2011, 11, 2845–2856. [Google Scholar] [CrossRef] [PubMed]
- Tsujita, T.; Ohara, M.; Sase, K.; Konno, A.; Nakayama, M.; Abe, K.; Uchiyama, M. Development of a haptic interface using MR fluid for displaying cutting forces of soft tissues. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1044–1049. [Google Scholar]
- Ahmadkhanlou, F.; Washington, G.N.; Bechtel, S.E. Modeling and Control of Single and Two Degree of Freedom Magnetorheological Fluid-based Haptic Systems for Telerobotic Surgery. J. Intell. Mater. Syst. Struct. 2009, 20, 1171–1186. [Google Scholar] [CrossRef]
- Yin, X.; Guo, S.; Song, Y. Magnetorheological Fluids Actuated Haptic-Based Teleoperated Catheter Operating System. Micromachines 2018, 9, 465. [Google Scholar] [CrossRef]
- Song, B.-K.; Oh, J.-S.; Choi, S.-B. Design of New 4-Dof Haptic Master Featuring Magnetorheological Fluid. Adv. Mech. Eng. 2014, 6, 843498. [Google Scholar] [CrossRef]
- Kikuchi, T.; Abe, I.; Nagata, T.; Yamaguchi, A.; Takano, T. Twin-Driven Actuator with Multi-layered Disc MR Fluid Clutches for Haptics. J. Intell. Mater. Syst. Struct. 2020, 32, 1326–1335. [Google Scholar] [CrossRef]
- Wellborn, P.S.; Mitchell, J.E.; Pieper, N.J.; Webster, R.J. Design and Analysis of a Small-Scale Magnetorheological Brake. IEEE/ASME Trans. Mechatron. 2022, 27, 3099–3109. [Google Scholar] [CrossRef]
- Kikuchi, T.; Ikeda, A.; Matsushita, R.; Higashiguchi, A.; Abe, I. Development of the 2nd Prototype of MR Fluid Actuator for Fine Haptic Interface. In Proceedings of the 8th International Symposium on Robotics & Mechatronics, Djerba, Tunisia, 17–19 April 2024; pp. 310–319. [Google Scholar]
- Ikeda, A.; Takano, T.; Abe, I.; Kikuchi, T.; Mimata, H.; Inomata, M. Kinematic Analysis and Evaluation of Delta-Type Haptic Device Using Twin-Driven MR Fluid Actuator. In Proceedings of the 2023 IEEE/SICE International Symposium on System Integrations, Atlanta, GA, USA, 17–20 January 2023; pp. 76–81. [Google Scholar]
- Kikuchi, T.; Abe, I. Low Inertia Torque Controllable Device Using Magnetorheological Fluid & Umbrella-Shaped Rotor. Eng. Res. Express. 2019, 1, 02502. [Google Scholar] [CrossRef]
- Goncalves, F.; Carlson, J. Investigating the time dependence of the MR effect. Int. J. Mod. Phys. B 2007, 21, 4832–4840. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Diameter of housing | 44 mm |
| Height without shaft | 35 mm |
| Pair number of discs | 3 |
| Thickness of disc | 0.2 mm |
| Thickness of MRF layer | 0.2 mm |
| Inner radius of disc | 10 mm |
| Outer radius of disc | 12 mm |
| Turning number of the coil | 154 |
| Mass with MRF | <120 g |
| Inertia of output part | 2.47 × 10−6 kg·m2 |
| Output torque | 0.25 Nm @ 1.2 A |
| Current [A] | Rot. Velocity [rpm] | Average Torque [Nm] | CV [%] |
|---|---|---|---|
| 0.1 | 10 | 0.03559 | 1.07 |
| 30 | 0.0384 | 1.23 | |
| 60 | 0.0384 | 1.30 | |
| 0.5 | 10 | 0.190 | 0.27 |
| 30 | 0.197 | 0.34 | |
| 60 | 0.201 | 0.29 | |
| 1.0 | 10 | 0.241 | 0.34 |
| 30 | 0.250 | 0.23 | |
| 60 | 0.256 | 0.21 |
| Current [A] | Rot. Velocity [rpm] | Time Constant [ms] |
|---|---|---|
| 0.0–0.5 | 10 | 14 |
| 30 | 10 | |
| 60 | 10 | |
| 0.5–0.0 | 10 | 13 |
| 30 | 12 | |
| 60 | 13 | |
| 0.0–1.0 | 10 | 16 |
| 30 | 8 | |
| 60 | 7 | |
| 1.0–0.0 | 10 | 20 |
| 30 | 20 | |
| 60 | 20 |
| Current [A] | Rot. Velocity [rpm] | Time Constant [ms] |
|---|---|---|
| 0.5–0.0 | 10 | 6 |
| 30 | 6 | |
| 60 | 6 | |
| 1.0–0.0 | 10 | 8 |
| 30 | 6 | |
| 60 | 6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kikuchi, T.; Ikeda, A.; Matsushita, R.; Abe, I. Development of Second Prototype of Twin-Driven Magnetorheological Fluid Actuator for Haptic Device. Micromachines 2024, 15, 1184. https://doi.org/10.3390/mi15101184
Kikuchi T, Ikeda A, Matsushita R, Abe I. Development of Second Prototype of Twin-Driven Magnetorheological Fluid Actuator for Haptic Device. Micromachines. 2024; 15(10):1184. https://doi.org/10.3390/mi15101184
Chicago/Turabian StyleKikuchi, Takehito, Asaka Ikeda, Rino Matsushita, and Isao Abe. 2024. "Development of Second Prototype of Twin-Driven Magnetorheological Fluid Actuator for Haptic Device" Micromachines 15, no. 10: 1184. https://doi.org/10.3390/mi15101184
APA StyleKikuchi, T., Ikeda, A., Matsushita, R., & Abe, I. (2024). Development of Second Prototype of Twin-Driven Magnetorheological Fluid Actuator for Haptic Device. Micromachines, 15(10), 1184. https://doi.org/10.3390/mi15101184