
A Single-Sensor Approach for Noninvasively Tracking Phase Velocity in Tendons during Dynamic Movement
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
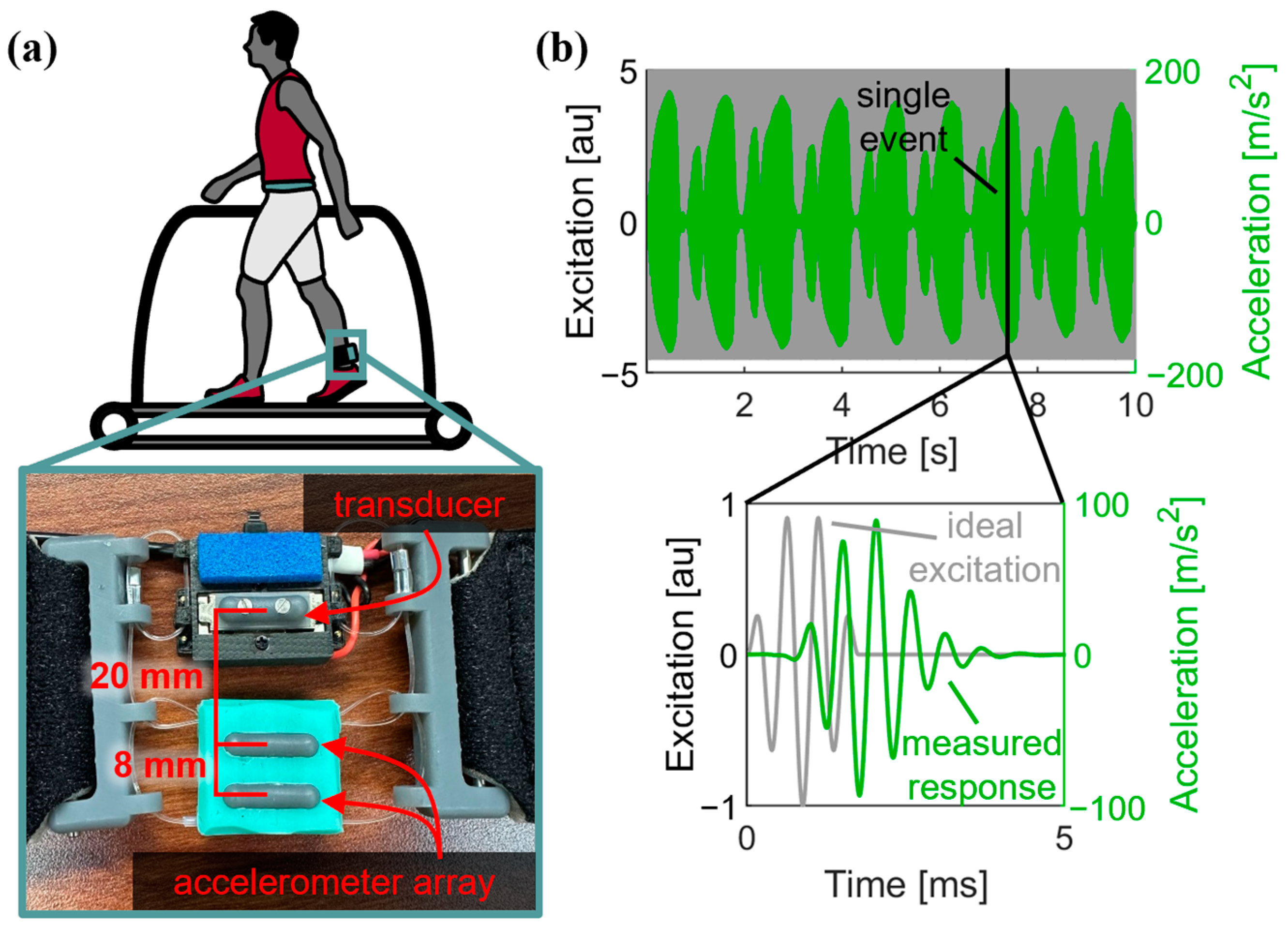
2.1. Wave Excitation and Measurement
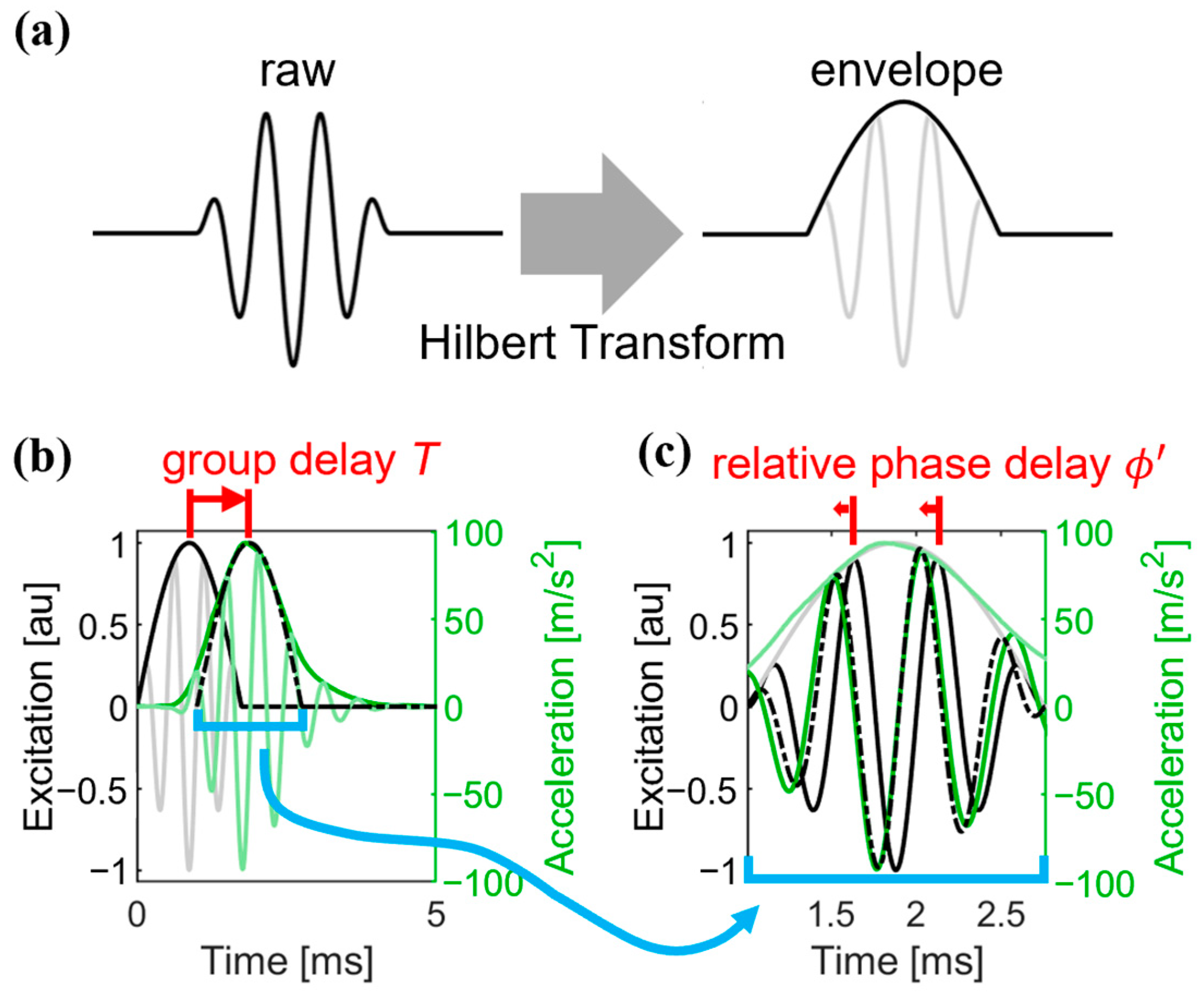
2.2. Wave Speed Computation
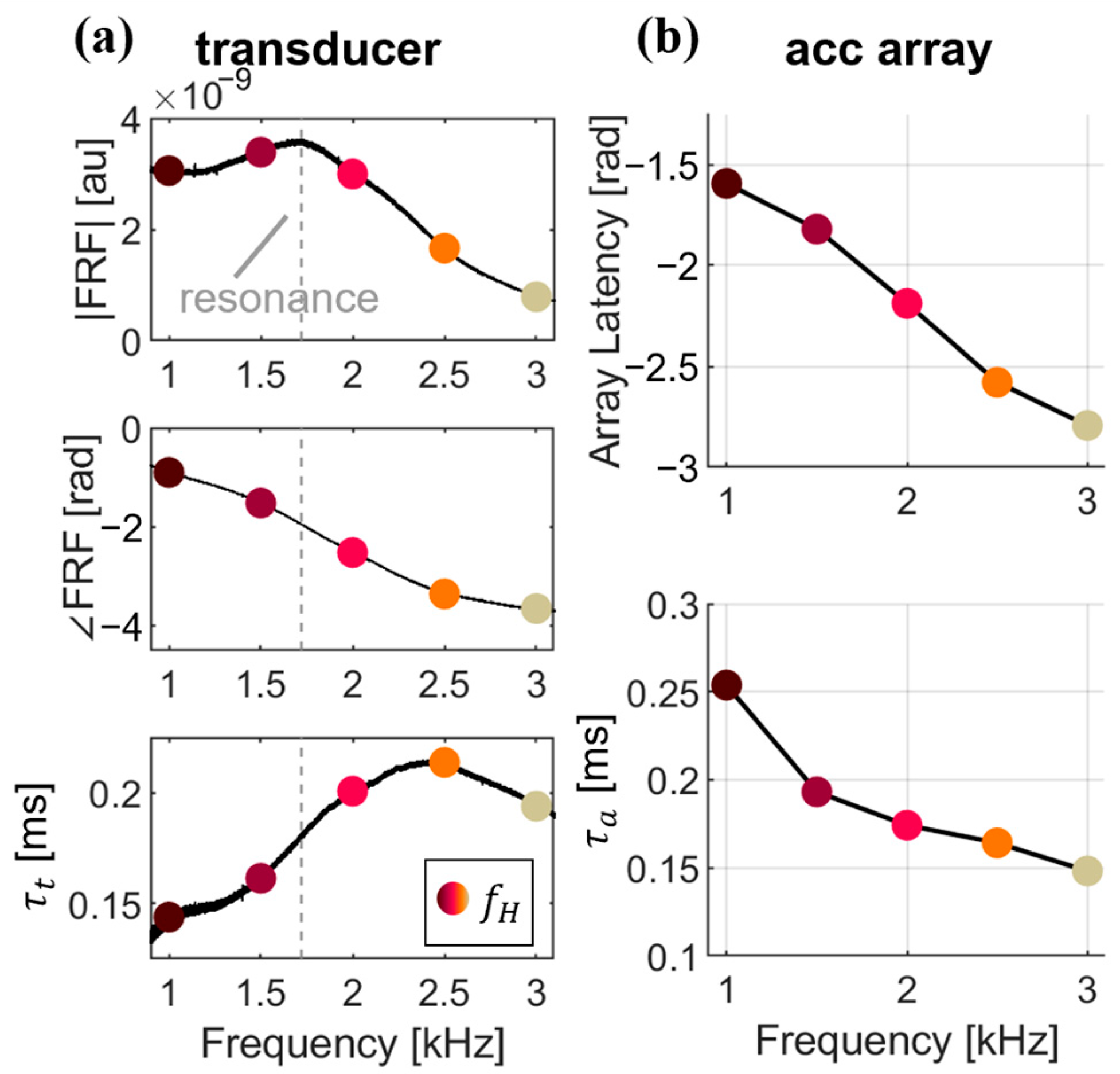
2.3. System Latency Characterization
2.4. In Vivo Implementation
3. Results
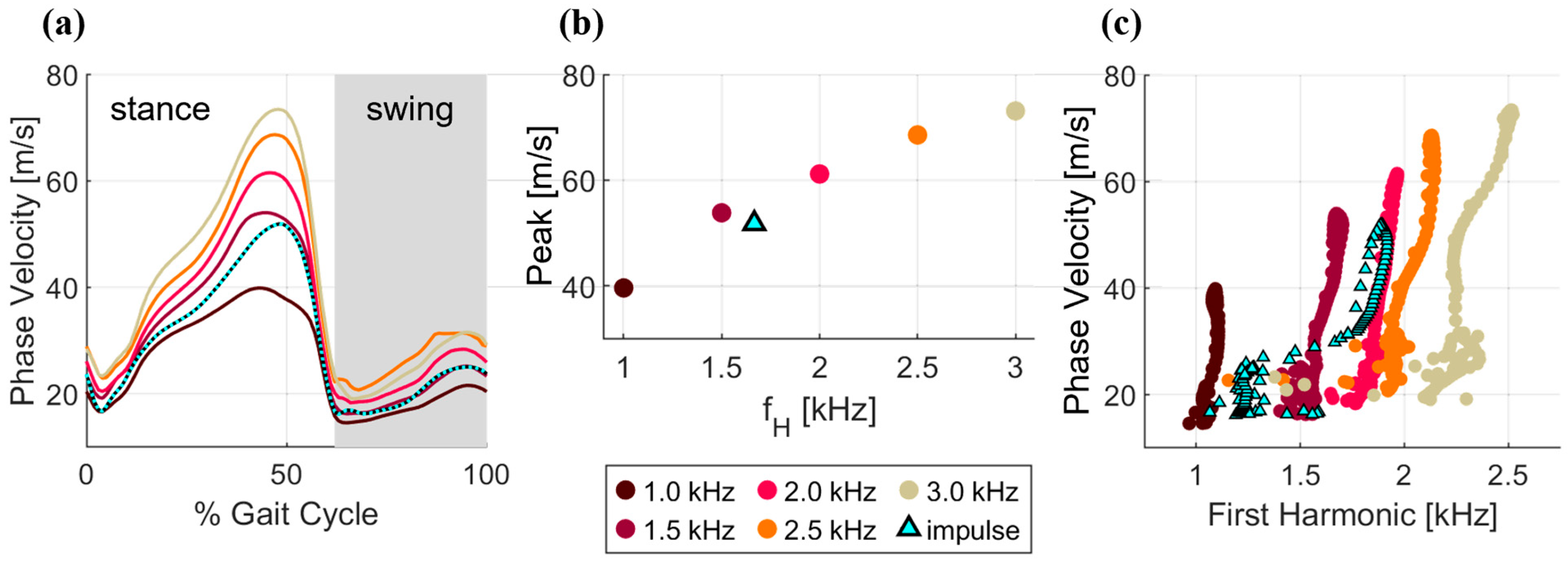
3.1. Frequency Dependence at a Fixed Speed
3.2. Comparison of Wavelet and Impulsive Excitation
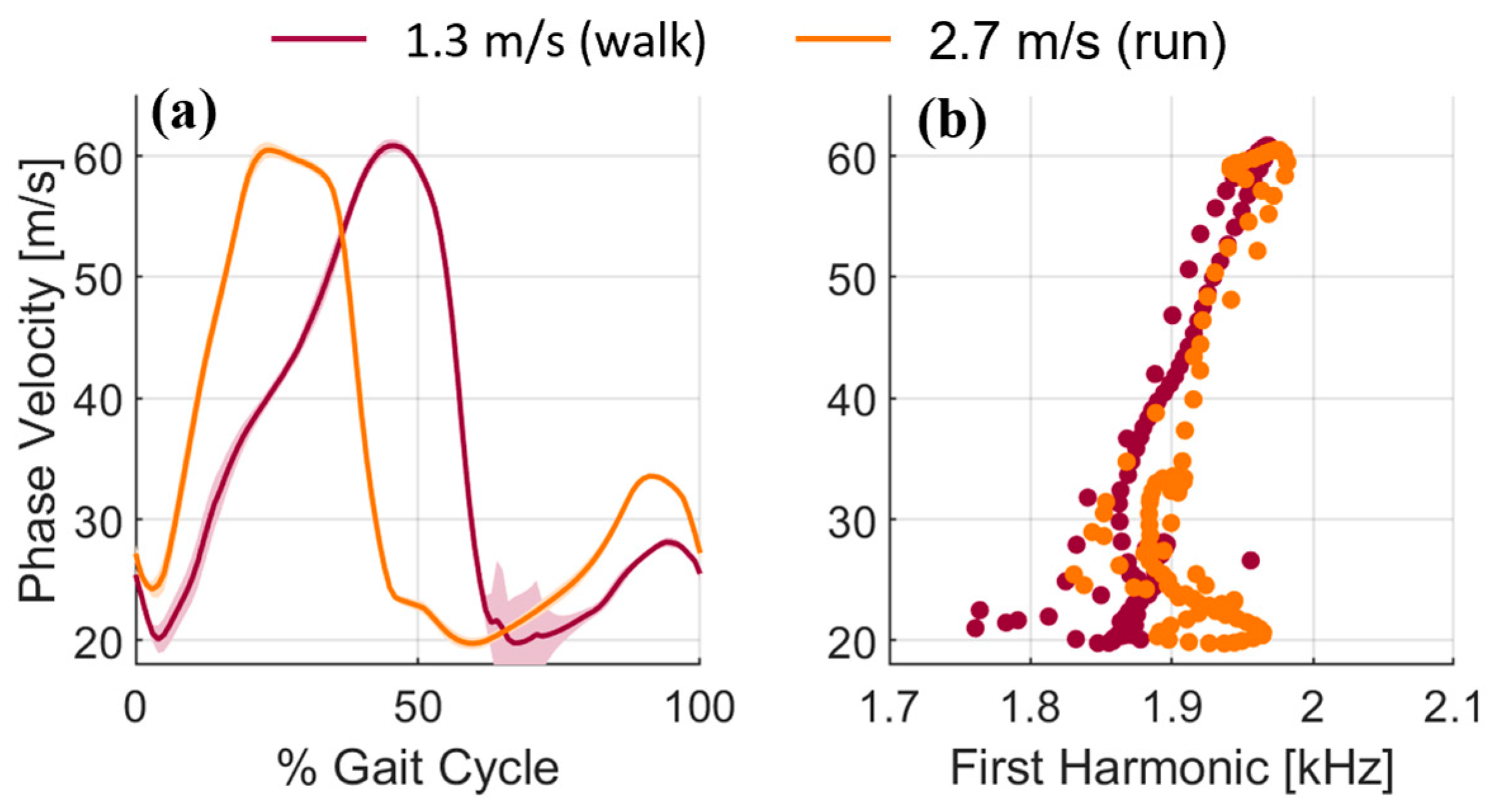
3.3. Phase Velocity Changes with Locomotion Speed and Paradigm
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Komi, P.V. Relevance of in vivo force measurements to human biomechanics. J. Biomech. 1990, 23 (Suppl. S1), 23–34. [Google Scholar] [CrossRef] [PubMed]
- Rosager, S.; Aagaard, P.; Dyhre-Poulsen, P.; Neergaard, K.; Kjaer, M.; Magnusson, S.P. Load-displacement properties of the human triceps surae aponeurosis and tendon in runners and non-runners. Scand. J. Med. Sci. Sports 2002, 12, 90–98. [Google Scholar] [CrossRef] [PubMed]
- Schache, A.G.; Kim, H.J.; Morgan, D.L.; Pandy, M.G. Hamstring muscle forces prior to and immediately following an acute sprinting-related muscle strain injury. Gait Posture 2010, 32, 136–140. [Google Scholar] [CrossRef] [PubMed]
- Lieber, R.L.; Bodine-Fowler, S.C. Skeletal Muscle Mechanics: Implications for Rehabilitation. Phys. Ther. 1993, 73, 844–856. [Google Scholar] [CrossRef] [PubMed]
- Martin, J.A.; Brandon, S.C.E.; Keuler, E.M.; Hermus, J.R.; Ehlers, A.C.; Segalman, D.J.; Allen, M.S.; Thelen, D.G. Gauging force by tapping tendons. Nat. Commun. 2018, 9, 1592. [Google Scholar] [CrossRef] [PubMed]
- Bercoff, J.; Criton, A.; Bacrie, C.; Souquet, J.; Tanter, M.; Gennisson, J.; Deffieux, T.; Fink, M.; Juhan, V.; Colavolpe, A.; et al. ShearWaveTM elastography: A new real time imaging mode for assessing quantitatively soft tissue viscoelasticity. In Proceedings of the 2008 IEEE Ultrasonics Symposium, Beijing, China, 2–5 November 2008; pp. 321–324. [Google Scholar] [CrossRef]
- Bercoff, J.; Sinkus, R.; Tanter, M.; Fink, M. 3D ultrasound-based dynamic and transient elastography: First in vitro results. Proc. IEEE Ultrason. Symp. 2004, 1, 28–31. [Google Scholar] [CrossRef]
- Hug, F.; Tucker, K.; Gennisson, J.L.; Tanter, M.; Nordez, A. Elastography for Muscle Biomechanics: Toward the Estimation of Individual Muscle Force. Exerc. Sport Sci. Rev. 2015, 43, 125–133. [Google Scholar] [CrossRef] [PubMed]
- Schneebeli, A.; Falla, D.; Cescon, C.; Barbero, M. Measurement of Achilles tendon loading using shear wave tensiometry: A reliability study. Musculoskelet. Sci. Pract. 2022, 62, 102665. [Google Scholar] [CrossRef] [PubMed]
- Martino, G.; Beck, O.N.; Ting, L.H. Voluntary muscle coactivation in quiet standing elicits reciprocal rather than coactive agonist-antagonist control of reactive balance. J. Neurophysiol. 2023, 129, 1378–1388. [Google Scholar] [CrossRef] [PubMed]
- Keuler, E.M.; Loegering, I.F.; Martin, J.A.; Roth, J.D.; Thelen, D.G. Shear Wave Predictions of Achilles Tendon Loading during Human Walking. Sci. Rep. 2019, 9, 13419. [Google Scholar] [CrossRef] [PubMed]
- Schneebeli, A.; Barbero, M.; Filardo, G.; Testa, E.; Riegger, M.; Sangiorgio, A.; Cescon, C.; Soldini, E.; Falla, D. Shear Wave Tensiometry Can Detect Loading Differences Between Operated and Unaffected Achilles Tendon. Foot Ankle Int. 2023, 44, 1295–1304. [Google Scholar] [CrossRef] [PubMed]
- Brum, J.; Bernal, M.; Gennisson, J.L.; Tanter, M. In vivo evaluation of the elastic anisotropy of the human Achilles tendon using shear wave dispersion analysis. Phys. Med. Biol. 2014, 59, 505. [Google Scholar] [CrossRef] [PubMed]
- Helfenstein-Didier, C.; Andrade, R.J.; Brum, J.; Hug, F.; Tanter, M.; Nordez, A.; Gennisson, J.-L. In vivo quantification of the shear modulus of the human Achilles tendon during passive loading using shear wave dispersion analysis. Phys. Med. Biol. 2016, 61, 2485–2496. [Google Scholar] [CrossRef] [PubMed]
- Nayfeh, A.H. The general problem of elastic wave propagation in multilayered anisotropic media. J. Acoust. Soc. Am. 1991, 89, 1521–1531. [Google Scholar] [CrossRef]
- Martin, J.A.; Schmitz, D.G.; Ehlers, A.C.; Allen, M.S.; Thelen, D.G. Calibration of the shear wave speed-stress relationship in ex vivo tendons. J. Biomech. 2019, 90, 9–15. [Google Scholar] [CrossRef] [PubMed]
- Cortes, D.H.; Suydam, S.M.; Silbernagel, K.G.; Buchanan, T.S.; Elliott, D.M. Continuous Shear Wave Elastography: A New Method to Measure Viscoelastic Properties of Tendons In Vivo. Ultrasound Med. Biol. 2015, 41, 1518–1529. [Google Scholar] [CrossRef] [PubMed]
- Crespo, B.H.; Courtney, C.R.P.; Engineer, B. Calculation of Guided Wave Dispersion Characteristics Using a Three-Transducer Measurement System. Appl. Sci. 2018, 8, 1253. [Google Scholar] [CrossRef]
- Ulrich, T.J. Envelope Calculation from the Hilbert Transform. March 2006. Available online: https://www.researchgate.net/publication/257547765_Envelope_Calculation_from_the_Hilbert_Transform (accessed on 6 March 2023).
- Schmitz, D.G.; Thelen, D.G.; Cone, S.G. A Kalman Filter Approach for Estimating Tendon Wave Speed from Skin-Mounted Accelerometers. Sensors 2022, 22, 2283. [Google Scholar] [CrossRef] [PubMed]
- Blank, J.L.; Thelen, D.G.; Roth, J.D. Ligament Shear Wave Speeds Are Sensitive to Tensiometer-Tissue Interactions: A Parametric Modeling Study. In Computer Methods, Imaging and Visualization in Biomechanics and Biomedical Engineering; Lecture Notes in Computational Vision and Biomechanics; Springer: Cham, Switzerland, 2019; Volume 36, pp. 48–59. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmitz, D.G.; Thelen, D.G.; Cone, S.G. A Single-Sensor Approach for Noninvasively Tracking Phase Velocity in Tendons during Dynamic Movement. Micromachines 2024, 15, 32. https://doi.org/10.3390/mi15010032
Schmitz DG, Thelen DG, Cone SG. A Single-Sensor Approach for Noninvasively Tracking Phase Velocity in Tendons during Dynamic Movement. Micromachines. 2024; 15(1):32. https://doi.org/10.3390/mi15010032
Chicago/Turabian StyleSchmitz, Dylan G., Darryl G. Thelen, and Stephanie G. Cone. 2024. "A Single-Sensor Approach for Noninvasively Tracking Phase Velocity in Tendons during Dynamic Movement" Micromachines 15, no. 1: 32. https://doi.org/10.3390/mi15010032
APA StyleSchmitz, D. G., Thelen, D. G., & Cone, S. G. (2024). A Single-Sensor Approach for Noninvasively Tracking Phase Velocity in Tendons during Dynamic Movement. Micromachines, 15(1), 32. https://doi.org/10.3390/mi15010032