

Optimization of Coupling Efficiency in Butterfly Optical Communication Laser Based on Chaotic Adaptive Seeker Optimization Algorithm


Abstract
:1. Introduction
2. Optimization of the Seeker Optimization Algorithm
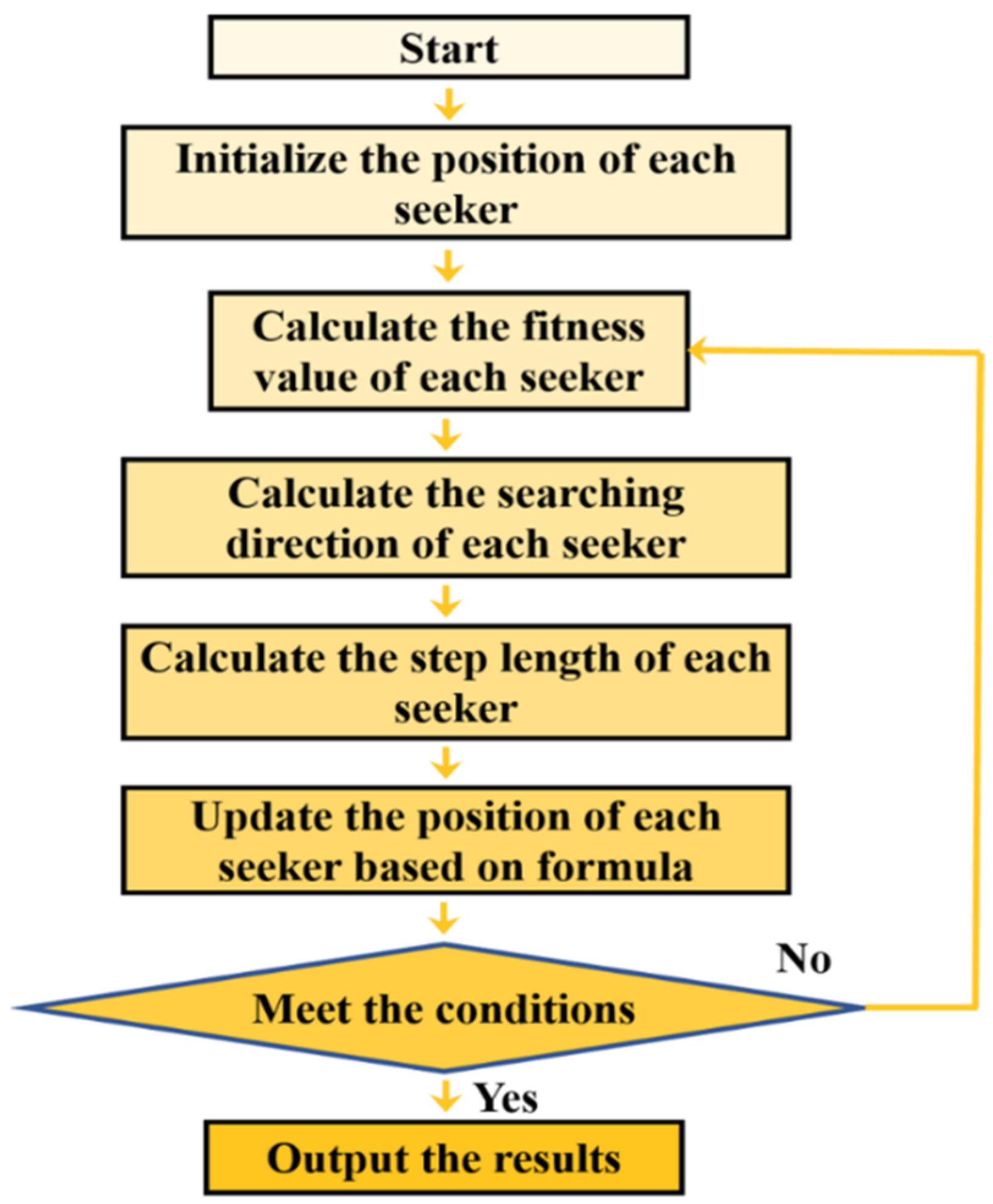
2.1. Seeker Optimization Algorithm
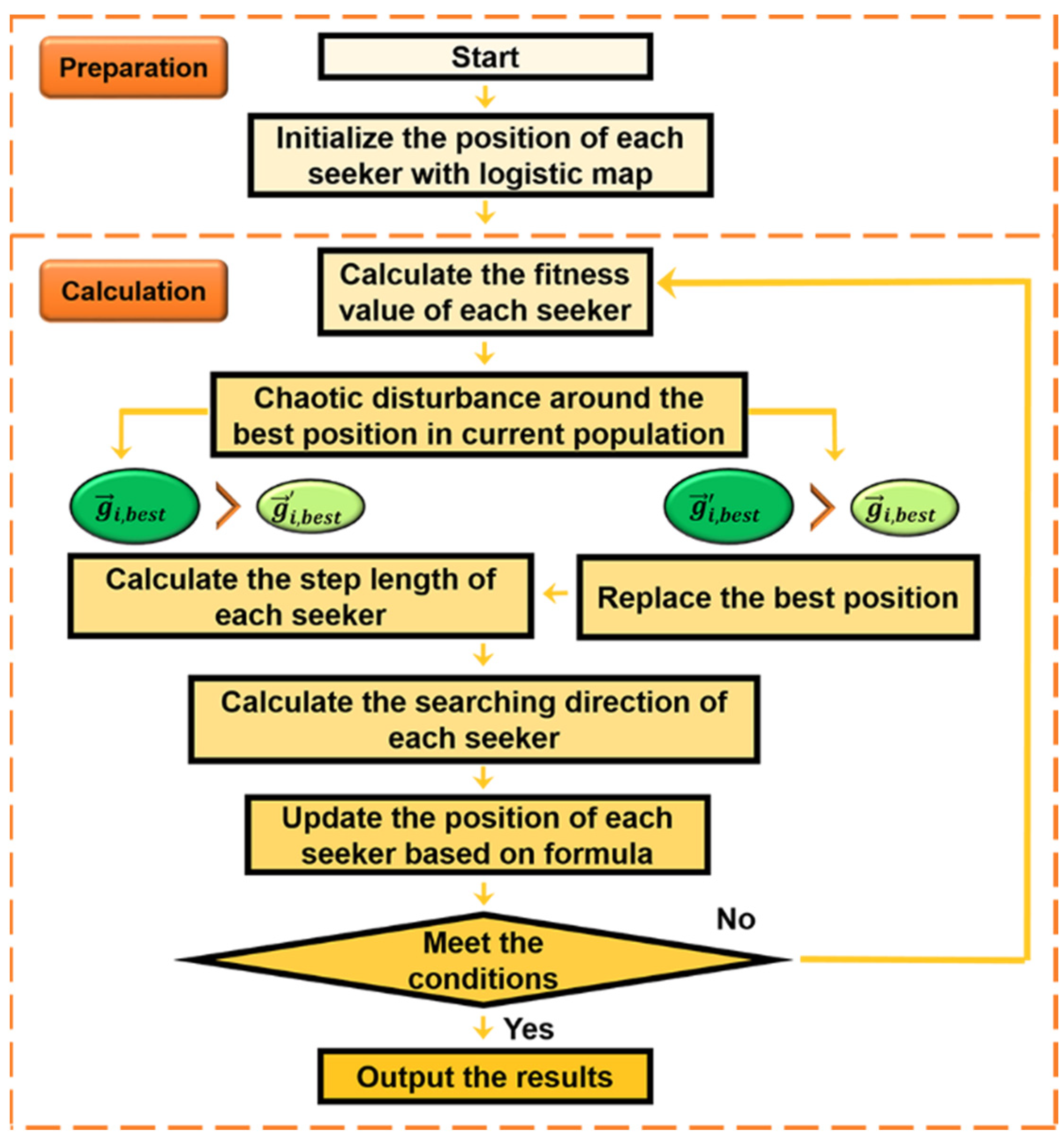
2.2. Optimization Strategy
- Step #1:
- This step sets up the upper (Ub) and lower (Lb) limits of the search space, the maximum number of iterations tmax, and the number of seekers n.
- Step #2:
- This step generates a vector with a dimension d at random in the search space [0, 1] ( and then derives n vectors via the logistic map (Equation (12)).
- Step #3:
- This step carries all the vectors to their corresponding range of initial positions, with the following relationship:
- Step #1:
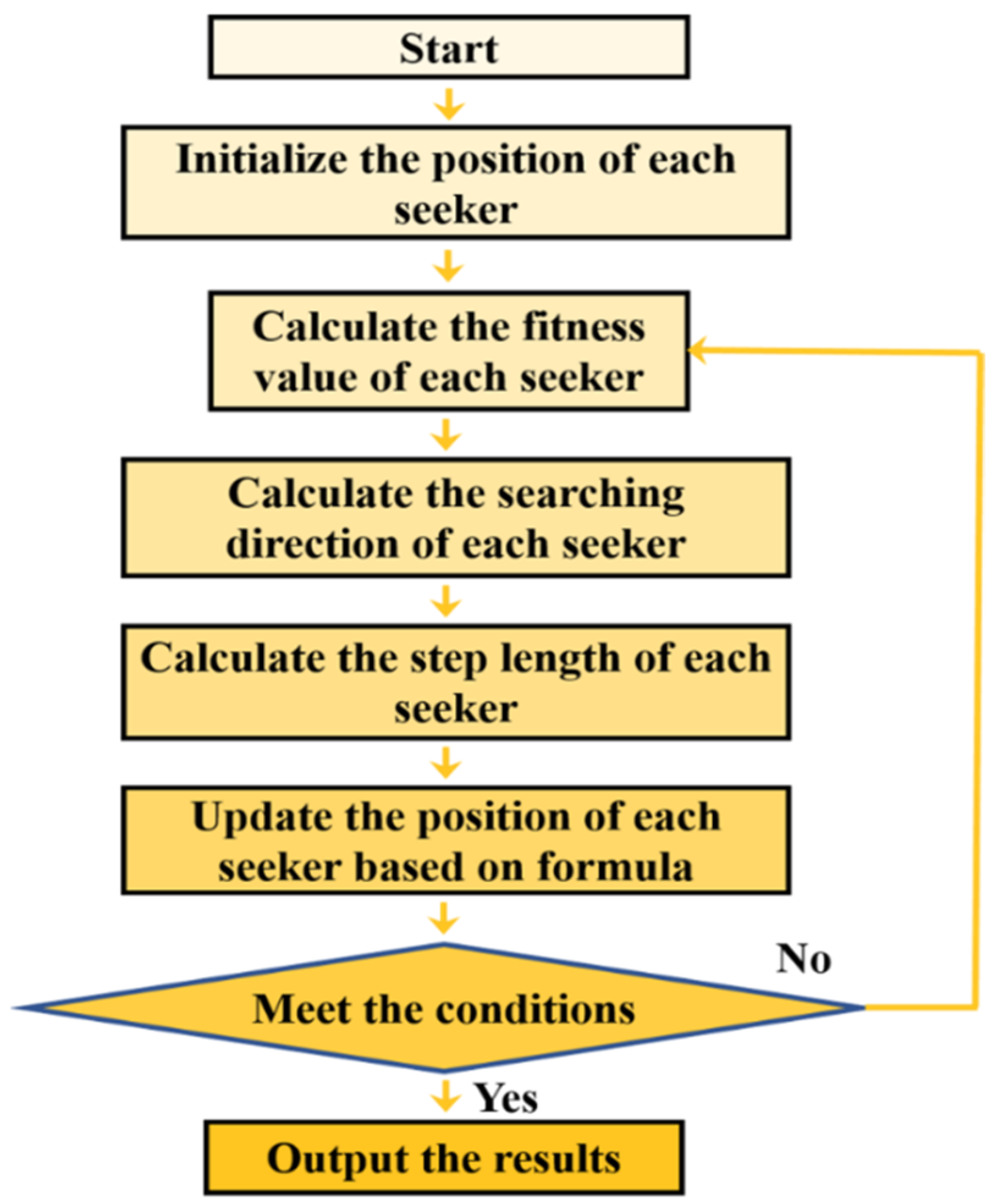
- This step calculates the fitness value of every seeker in iterations and then ranks and obtains the best positions of all the seekers in the current population.
- Step #2:
- This step derives m noise variables in the neighborhood around via chaotic disturbance (; reappraises the fitness value of , if ; terminates the disturbance and iterates to the next step; or chooses the best position to replace .
- Step #3:
- This step updates the search direction via Equations (2) and (4) and updates the search step length via Equations (8) and (9).
3. Results and Discussion
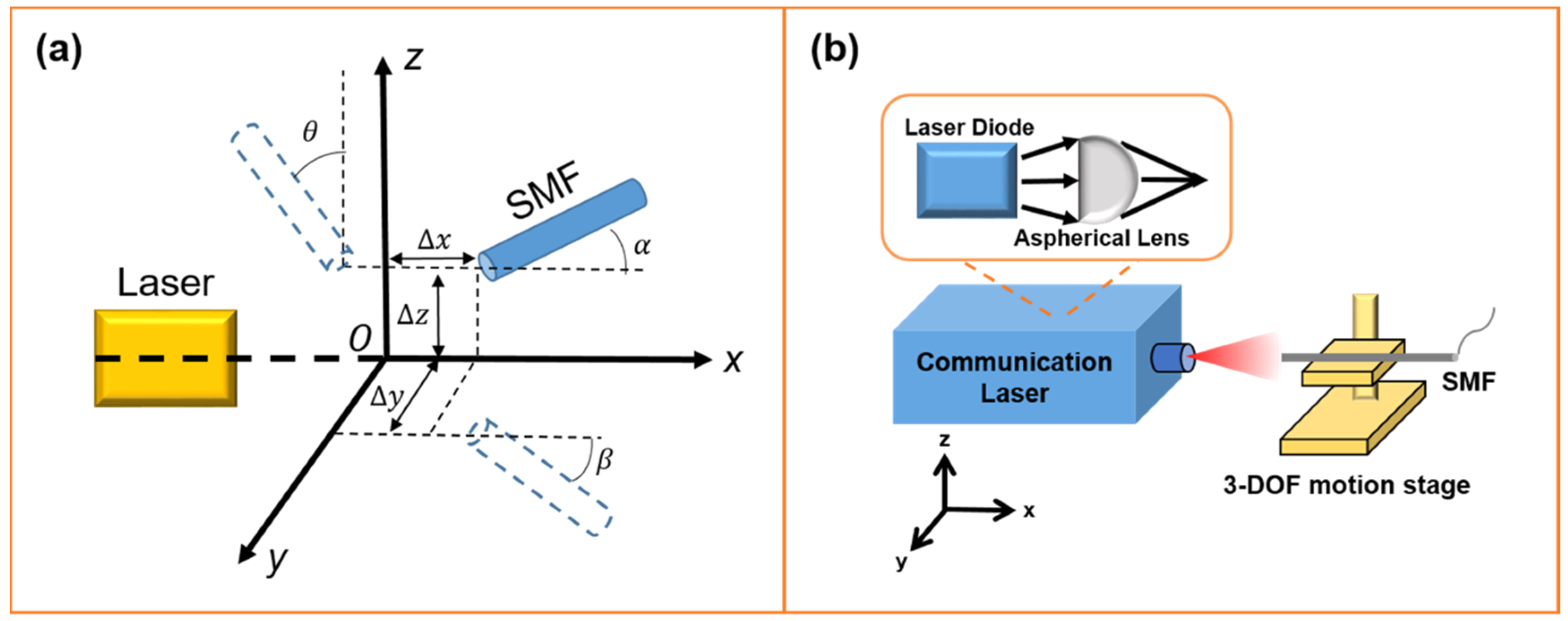
3.1. Optical Coupling Model
3.2. Simulation
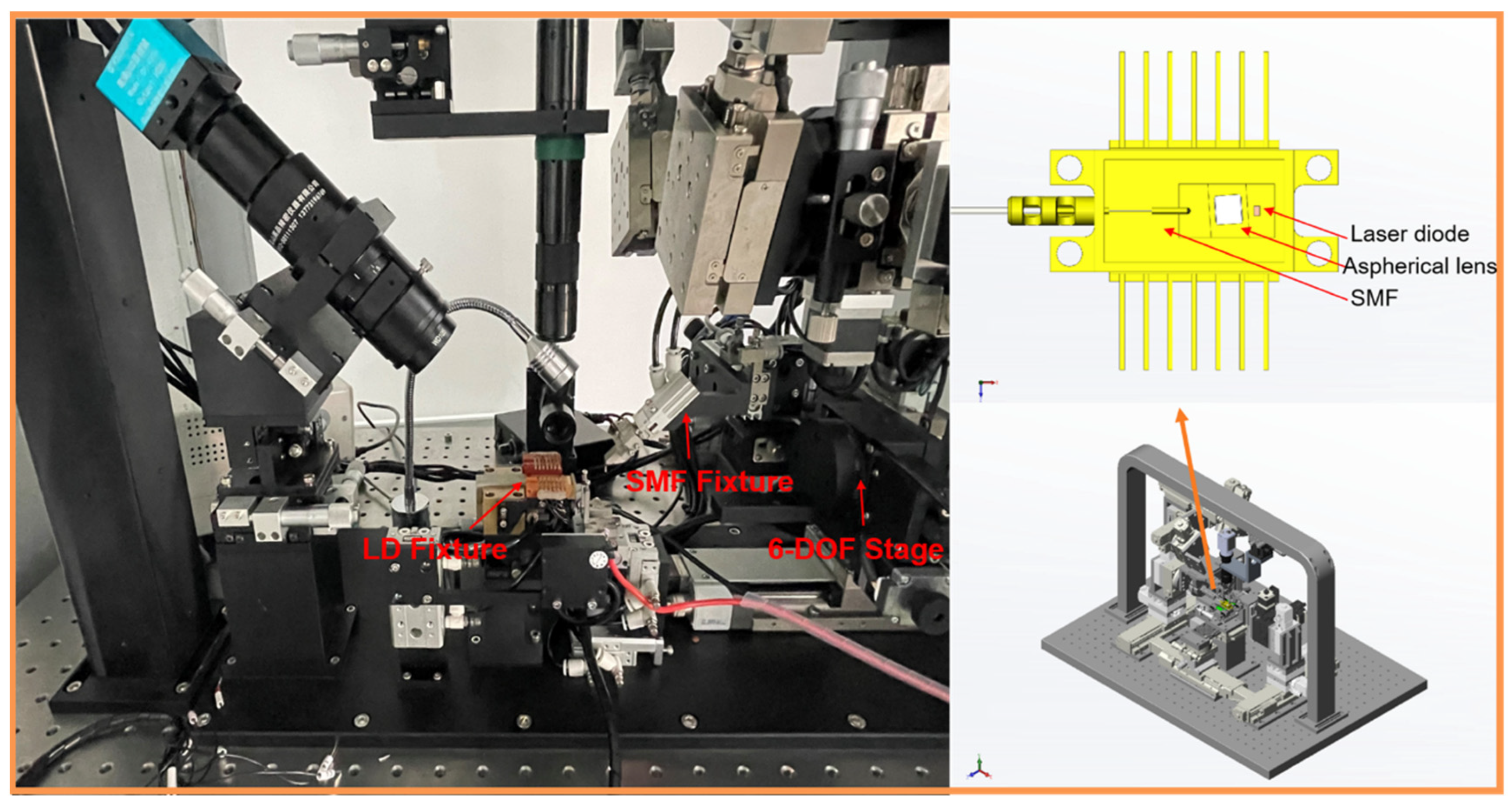
3.3. Experiment
- Step #1:
- With CCD recognition, the SMF was shifted to a position where the optical output power could reach up to 10 . This position was then designated as the initial coupling point.
- Step #2:
- The platform’s repeatability was set to 0.1 , and the movement velocity was set to 1 mm/s. The search range was set to three dimensions: . Thus, this search space could generate 20,000 unshrouded points. The precision alignment algorithms were then applied to the movement system. The fitness value was defined as the optical power value, and the search could last up to 700 or 150 iterations. The number of seekers was set between 10 and 30, and the other parameters of the algorithms used in this experiment were the same as in the simulation (Table 2). In the CASOA, for example, we set 10 seekers as the chaotic disturbance population, and the chaotic map was limited to .
- Step #3:
- The 3-DOF movement platform moved continuously when the coupling experiment started. The SMF moved to the target points stepwise in each iteration based on the algorithms. Then, the SMF shifted to the largest optical output power of the searched point for the next iteration after comparing all the optical output powers of the searched point.
- Step #4:
- The SMF finally arrived at the final target point. It recorded all the largest points in each iteration and the corresponding search time.
4. Conclusions
- (1)
- The CASOA exhibited a good optimization performance with a small population (accuracy and efficiency). It only took 38.3 iterations and 14.7 s to arrive at the best position with the highest output optical power and a search accuracy of 100%. The DASSS-SOA, LSOA, and LPSO performed poorly compared with the CASOA. The chaotic disturbance had the potential to enhance the optimizability of seekers, particularly in the early stages.
- (2)
- Increasing the population to decrease the number of iterations could yield good results for LD and SMF coupling alignment. However, the number of detected points increased, resulting in more displacement and motion errors. Consequently, few population strategies in the CASOA could reduce displacement and, consequently, motion errors. This method also improved the coupling efficiency.
Author Contributions
Funding
Conflicts of Interest
References
- Hsu, Y.-C.; Kuang, J.-H.; Tsai, Y.-C.; Cheng, W.-H. Investigation and comparison of postweld-shift compensation technique in TO-Can-and butterfly-type laser-welded laser module packages. IEEE J. Sel. Top. Quantum Electron. 2006, 12, 961–969. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Q.; Xu, Q.Y. Numerical modeling of RF-excited plasma in coaxial CO2 lasers. Opt. Commun. 1999, 160, 86–91. [Google Scholar] [CrossRef]
- Liu, Z.; Zhou, H.; Xu, H.; Duan, J.A. Three degree of freedom automatic coupling alignment of coaxial optical communication laser. Opt. Eng. 2020, 59, 1. [Google Scholar] [CrossRef]
- Hu, L.; Cui, J. Digital image recognition based on Fractional-order-PCA-SVM coupling algorithm. Measurement 2019, 145, 150–159. [Google Scholar] [CrossRef]
- Liu, W.C.; Veasey, D.L.; Houde-Walter, S.N. Design and optimization of a diode-pumped fiber-coupled Yb:Er glass waveguide laser. Appl. Opt. 2000, 39, 6165–6173. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Shi, F.G. Novel fiber optic alignment strategy using Hamiltonian algorithm and Matlab/Simulink. Opt. Eng. 2003, 42, 2240. [Google Scholar] [CrossRef]
- Tan, L.; Chen, Y.; Zhao, L.; Yu, S.; Kang, D.; Yang, Q.; Ma, J. Optimal coupling condition analysis of free-space optical communication receiver based on few-mode fiber. Opt. Fiber Technol. 2019, 53, 102004. [Google Scholar] [CrossRef]
- Nosato, H.; Murakawa, M.; Higuchi, T. Automatic alignment of multiple optical components using Genetic algorithm. In Proceedings of the 1st NASA/SEA Conference on Adaptive Hardware & Systems, Istanbul, Turkey, 15–18 June 2006; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar] [CrossRef]
- Duan, L.; Zhou, H.; Tan, S.; Duan, J.-A.; Liu, Z. Improved particle swarm optimization algorithm for enhanced coupling of coaxial optical communication laser. Opt. Fiber Technol. 2021, 64, 102559. [Google Scholar] [CrossRef]
- Dai, C.; Chen, W.; Song, Y.; Zhu, Y. Seeker optimization algorithm: A novel stochastic search algorithm for global numerical optimization. J. Syst. Eng. Electron. 2010, 21, 300–311. [Google Scholar] [CrossRef]
- Dai, C.; Chen, W.; Zhu, Y.; Zhang, X. Reactive power dispatch considering voltage stability with seeker optimization algorithm. Electr. Power Syst. Res. 2009, 79, 1462–1471. [Google Scholar] [CrossRef]
- Dai, C.; Chen, W.; Zhu, Y.; Zhang, X. Seeker Optimization Algorithm for Optimal Reactive Power Dispatch. IEEE Trans. Power Syst. 2009, 24, 1218–1231. [Google Scholar] [CrossRef]
- Kumar, M.R.; Deepak, V.; Ghosh, S. Fractional-order controller design in frequency domain using an improved nonlinear adaptive seeker optimization algorithm. Turk. J. Electr. Eng. Comput. 2017, 25, 4299–4310. [Google Scholar] [CrossRef]
- Yang, H. Wavelet neural network with SOA based on dynamic adaptive search step size for network traffic prediction. Optik 2020, 224, 165322. [Google Scholar] [CrossRef]
- He, F.; Guo, Y.; Chao, G. A parameter estimation method of the simple PCNN model for infrared human segmentation. Opt. Laser Technol. 2019, 110, 114–119. [Google Scholar] [CrossRef]
- Ye, X.; Wang, X.; Gao, S.; Mou, J.; Wang, Z. A new random diffusion algorithm based on the multi-scroll Chua’s chaotic circuit system. Opt. Lasers Eng. 2020, 127, 105905. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, X.; Wang, M.; Li, D. A new combination chaotic system and its application in a new Bit-level image encryption scheme. Opt. Lasers Eng. 2022, 149, 106782. [Google Scholar] [CrossRef]
- Amraee, T. Coordination of Directional Overcurrent Relays Using Seeker Algorithm. IEEE Trans. Power Deliv. 2012, 27, 1415–1422. [Google Scholar] [CrossRef]
- Stengel, R.F.; Ray, L.R. Stochastic robustness of linear time-invariant control systems. IEEE Trans. Autom. Control 1991, 36, 82–87. [Google Scholar] [CrossRef]
- He, Y.; Yang, S.; Xu, Q. Short-term cascaded hydroelectric system scheduling based on chaotic particle swarm optimization using improved logistic map. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 1746–1756. [Google Scholar] [CrossRef]
- Tian, D.; Zhao, X.; Shi, Z. Chaotic particle swarm optimization with sigmoid-based acceleration coefficients for numerical function optimization. Swarm Evol. Comput. 2019, 51, 100573. [Google Scholar] [CrossRef]
- Shibata, H. Lyapunov exponent of partial differential equation. Phisica A 1999, 264, 226–233. [Google Scholar] [CrossRef]
- Liang, J.J.; Qu, B.Y.; Suganthan, P.N.; Hernández-Díaz, A.G. Hernández-Díaz Problem definitions and evaluation criteria for the CEC 2013 special session and competition on real-parameter optimization. Comput. Intell. Lab. Zhengzhou Univ. Zhengzhou China Nanyang Technol. Univ. Singap. Tech. Rep. 2013, 201212, 281–295. [Google Scholar]
- Chun, J.; Wu, Y.-L.; Dai, Y.-F.; Li, S.-Y. Fiber optic active alignment method based on a pattern search algorithm. Opt. Eng. 2006, 4, 828. [Google Scholar] [CrossRef]
- Junhong, Y.; Linhui, G.; Hualing, W.; Huicheng, M.; Hao, T.; Songxin, G.; Deyong, W. Analysis influence of fiber alignment error on laser-diode fiber coupling efficiency. Optik 2016, 127, 3276–3280. [Google Scholar] [CrossRef]
- Jian, L.; Chen, C. Parameter estimation of chaotic systems by an oppositional seeker optimization algorithm. Nonlinear Dyn. 2014, 76, 509–517. [Google Scholar] [CrossRef]
- Jordehi, A.R. Seeker optimization (human group optimization) algorithm with chaos. J. Exp. Theor. Artif. Intell. 2015, 27, 753–762. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Function Variation | Parameters | Reference |
|---|---|---|---|
| DASSS-SOA | Yang H., 2020 [14] | ||
| LSOA | Dai C.H., 2010 [10] | ||
| LPSO | Lian D., 2021 [9] |
| SOA | Improved PSO | ||||||
|---|---|---|---|---|---|---|---|
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
| 0.9 | 0.4 | ||||||
| 0.1 | x | ||||||
| x | y | ||||||
| y | z | ||||||
| 0.9500 | z | 2 | |||||
| 0.0111 | 2 | ||||||
| 4 | 0.9 | \ | \ | ||||
| CASOA in Simulation Performed 30 Times | ||||||||
| 2 | 5 | 10 | 20 | 30 | 40 | 50 | 100 | |
| 26 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |
| 42.3 | 19.2 | 15.5 | 12.3 | 9.8 | 8.4 | 7.2 | 4.6 | |
| 16.986 | 9.460 | 6.274 | 2.938 | 2.878 | 2.923 | 2.679 | 2.813 | |
| DASSS-SOA in simulation performed 30 times | ||||||||
| 2 | 5 | 10 | 20 | 30 | 40 | 50 | 100 | |
| 18 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |
| 44.0 | 23.9 | 18.8 | 14.1 | 13.9 | 12.6 | 10.2 | 7.1 | |
| 16.213 | 9.179 | 8.612 | 4.813 | 4.323 | 4.014 | 3.145 | 3.328 | |
| LSOA in simulation performed 30 times | ||||||||
| 2 | 5 | 10 | 20 | 30 | 40 | 50 | 100 | |
| 13 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |
| 49.8 | 23.4 | 17.2 | 12.1 | 13.9 | 12.6 | 8.5 | 5.6 | |
| 19.804 | 11.093 | 8.457 | 4.873 | 3.786 | 3.823 | 3.145 | 2.715 | |
| LPSO in simulation performed 30 times | ||||||||
| 2 | 5 | 10 | 20 | 30 | 40 | 50 | 100 | |
| 1 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | |
| 46 | 43.3 | 23.3 | 9.8 | 5.8 | 3.6 | 2.9 | 1.8 | |
| - | 22.892 | 11.089 | 6.660 | 5.323 | 4.325 | 1.912 | 0.554 | |
| 10 Seekers | CASOA | DASSS-SOA | LSOA | LPSO |
| Number of successes | 10 | 9 | 7 | 8 |
| Number of failures | 0 | 1 | 3 | 2 |
| 38.3 | 42.6 | 50.4 | 48.2 | |
| The number of detected spatial points | 383 | 426 | 504 | 482 |
| Search time (s) | 14.7 | 16 | 20.2 | 19.1 |
| 30 seekers | CASOA | DASSS-SOA | LSOA | LPSO |
| Number of successes | 10 | 10 | 9 | 10 |
| Number of failures | 0 | 0 | 1 | 0 |
| 23.4 | 29.4 | 33.6 | 22.8 | |
| The number of detected spatial points | 702 | 882 | 1008 | 684 |
| Search time (s) | 14.6 | 16.2 | 17.2 | 13.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, S.; Xu, C.; Sun, D.; Duan, L.; Duan, J.-a. Optimization of Coupling Efficiency in Butterfly Optical Communication Laser Based on Chaotic Adaptive Seeker Optimization Algorithm. Micromachines 2023, 14, 1417. https://doi.org/10.3390/mi14071417
Zhong S, Xu C, Sun D, Duan L, Duan J-a. Optimization of Coupling Efficiency in Butterfly Optical Communication Laser Based on Chaotic Adaptive Seeker Optimization Algorithm. Micromachines. 2023; 14(7):1417. https://doi.org/10.3390/mi14071417
Chicago/Turabian StyleZhong, Shunshun, Cong Xu, Dongmei Sun, Lian Duan, and Ji-an Duan. 2023. "Optimization of Coupling Efficiency in Butterfly Optical Communication Laser Based on Chaotic Adaptive Seeker Optimization Algorithm" Micromachines 14, no. 7: 1417. https://doi.org/10.3390/mi14071417
APA StyleZhong, S., Xu, C., Sun, D., Duan, L., & Duan, J.-a. (2023). Optimization of Coupling Efficiency in Butterfly Optical Communication Laser Based on Chaotic Adaptive Seeker Optimization Algorithm. Micromachines, 14(7), 1417. https://doi.org/10.3390/mi14071417