

Design and Implementation of an Integrated Control Scheme for GaN-Based Multiple Power Converters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
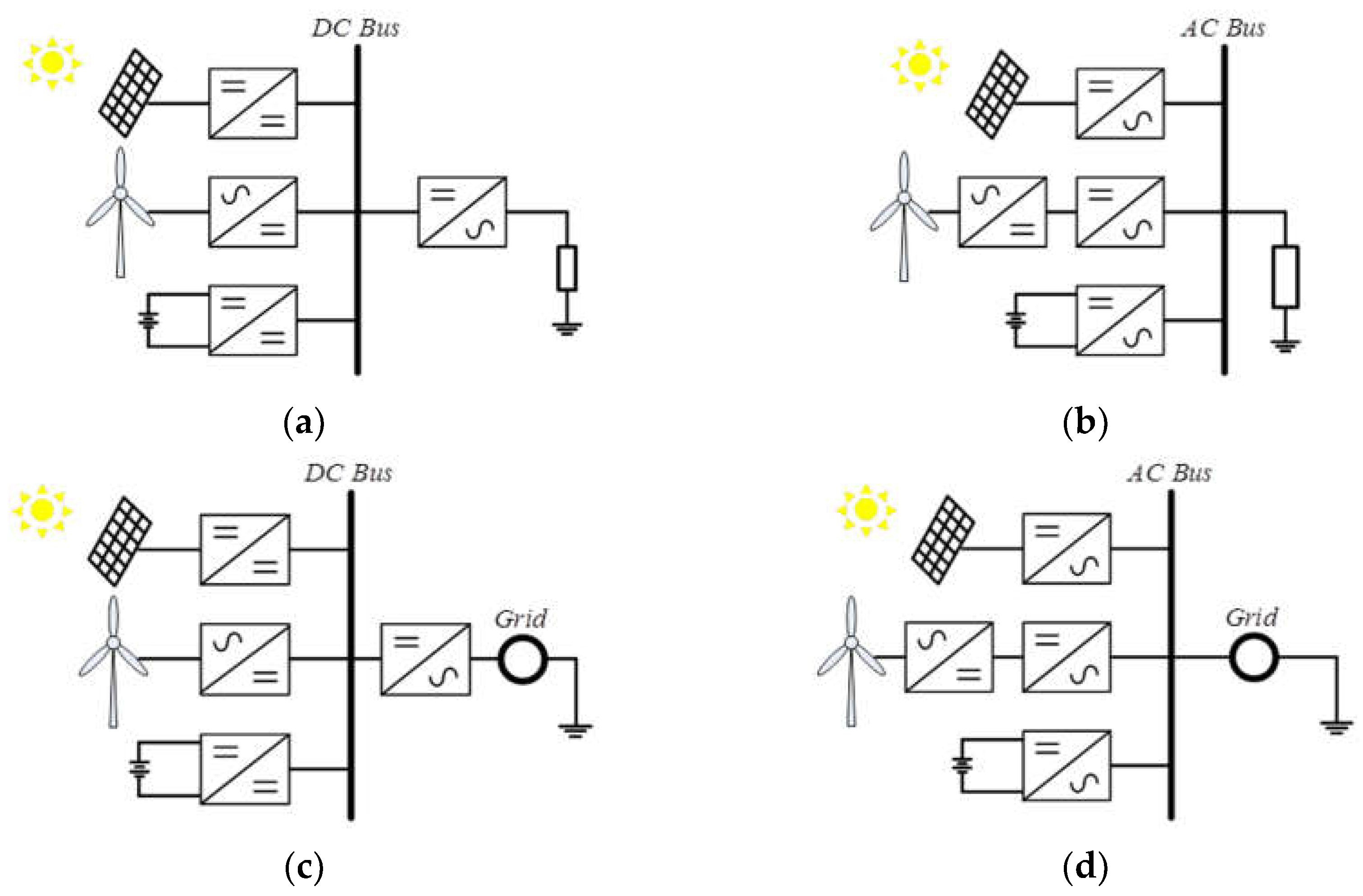
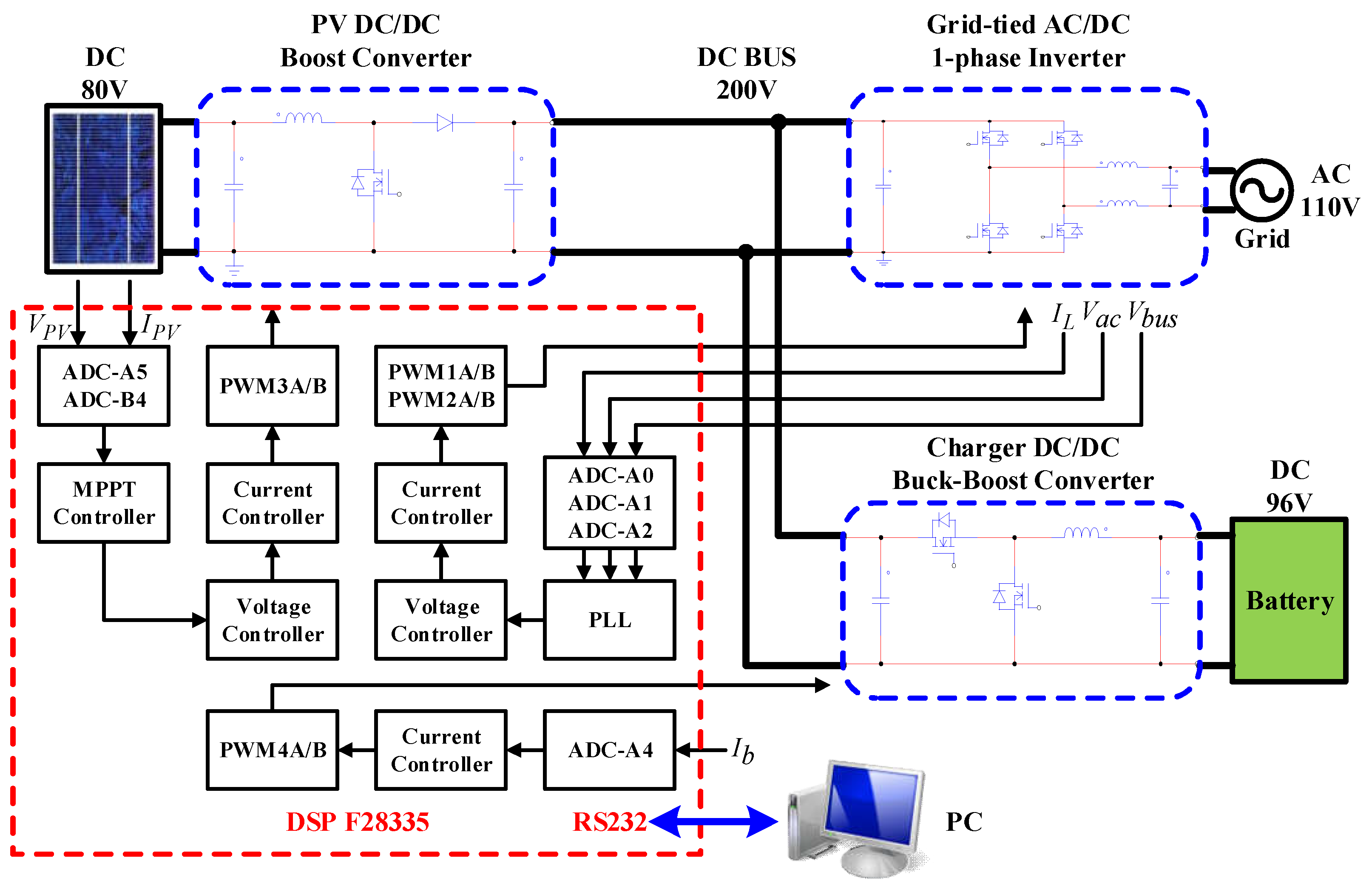
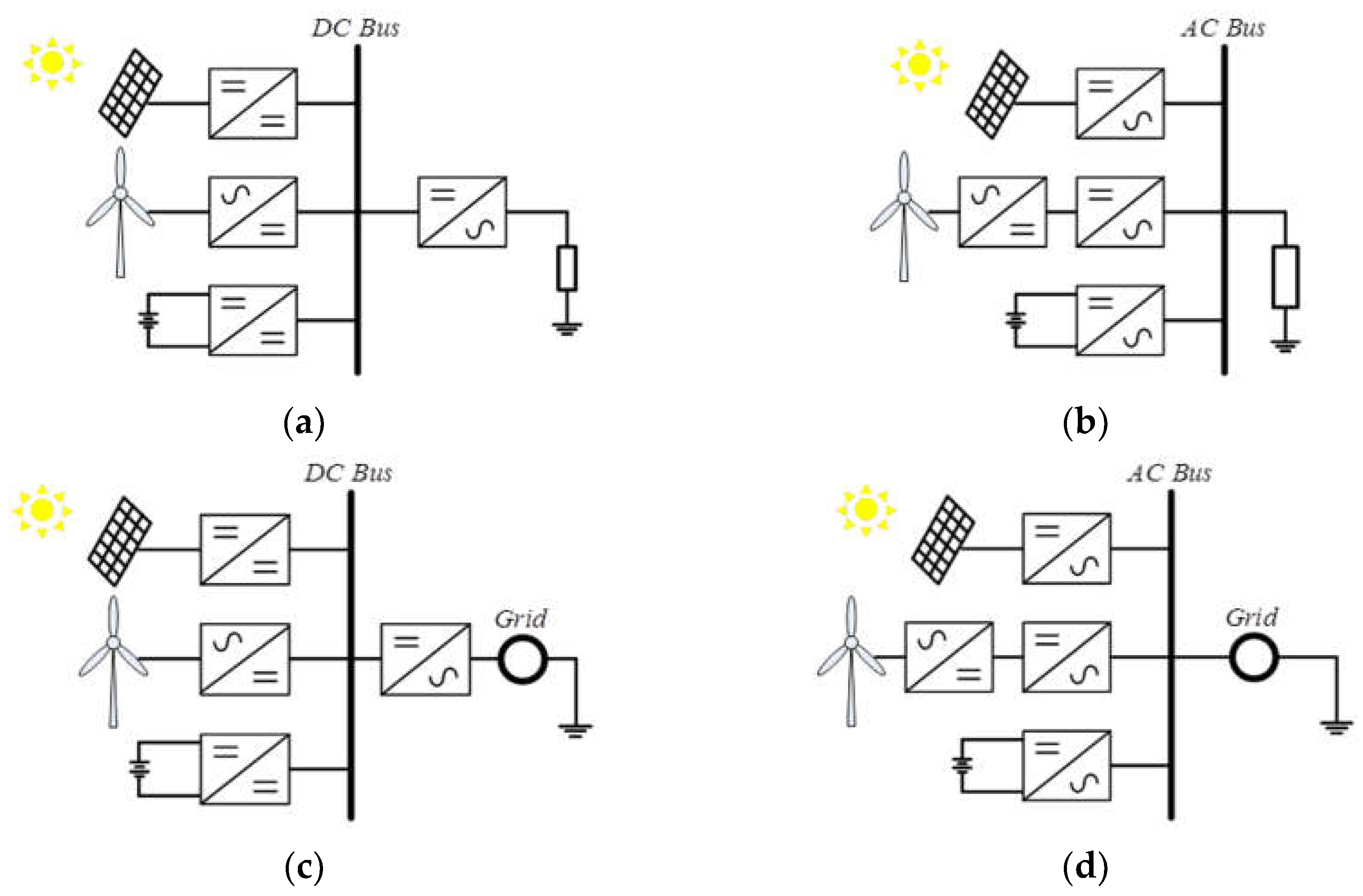
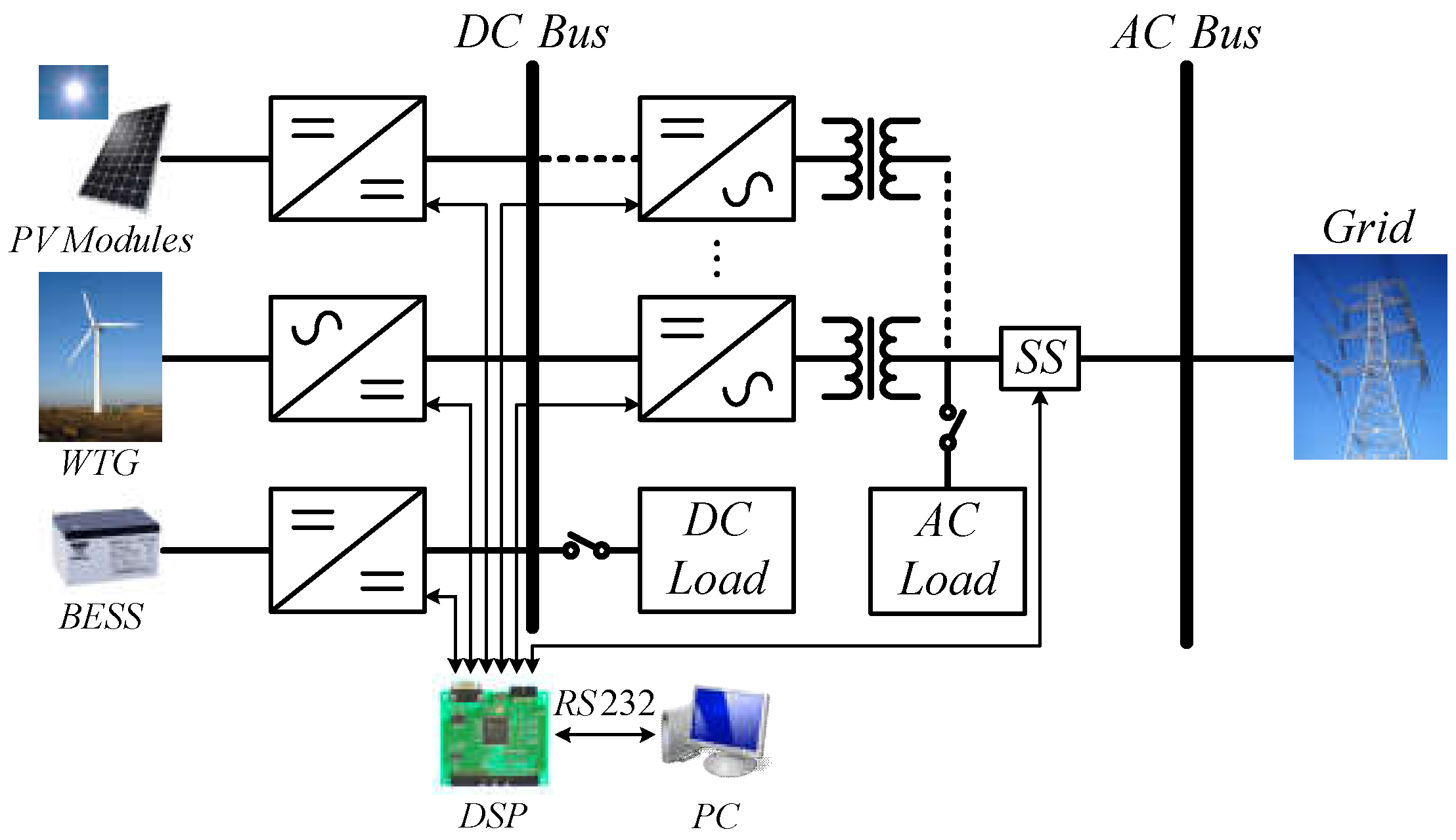
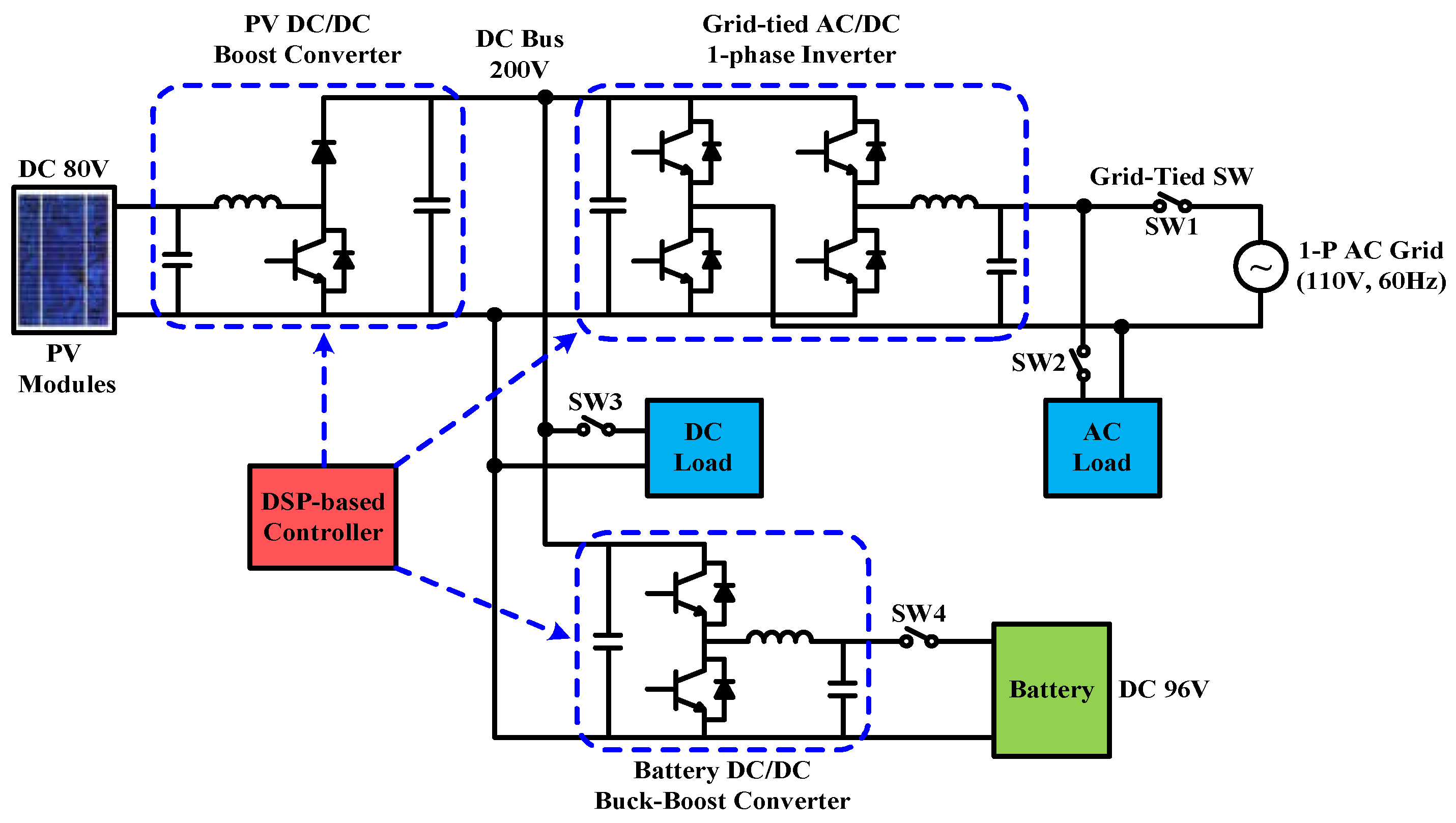
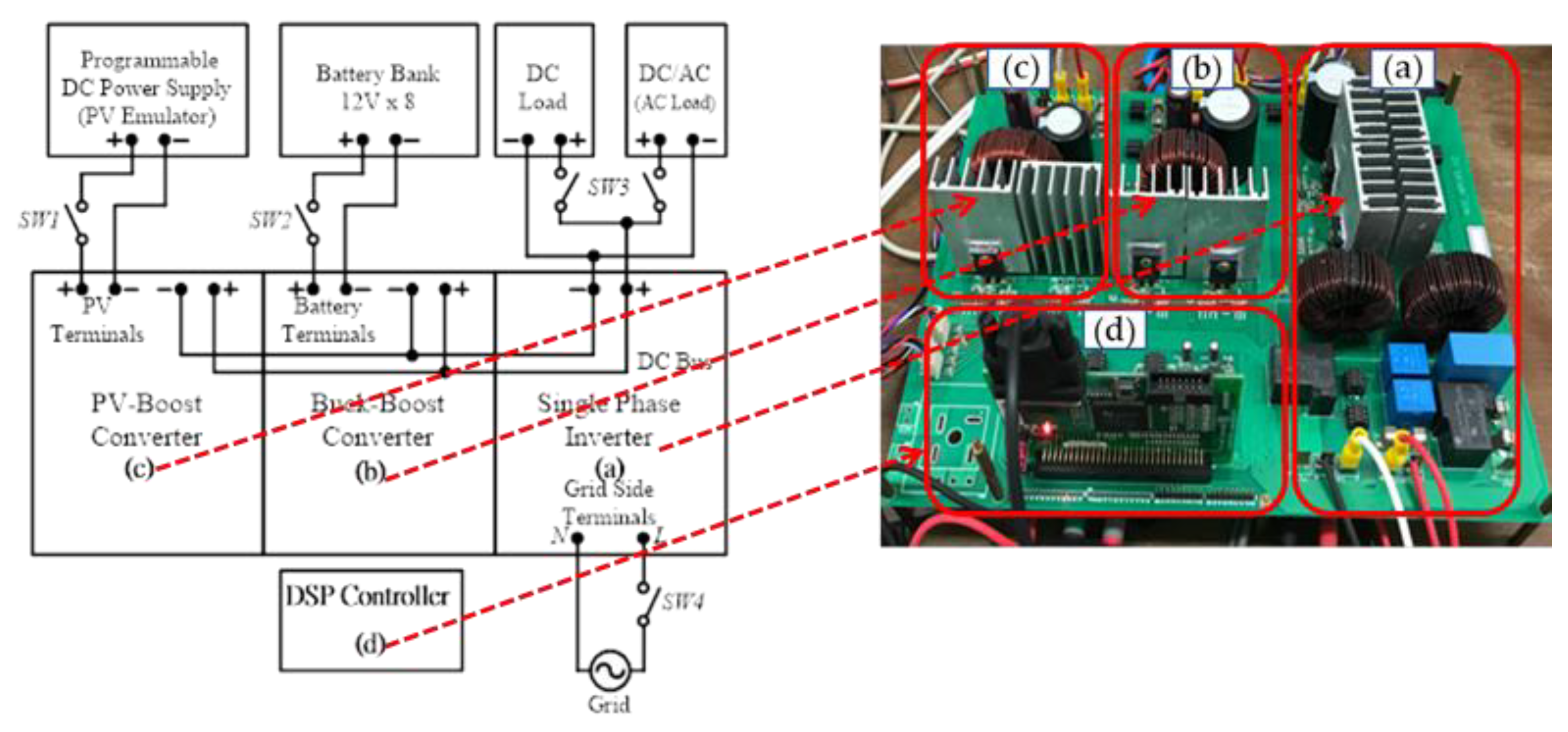
2. System Configuration and Operating Mode Planning
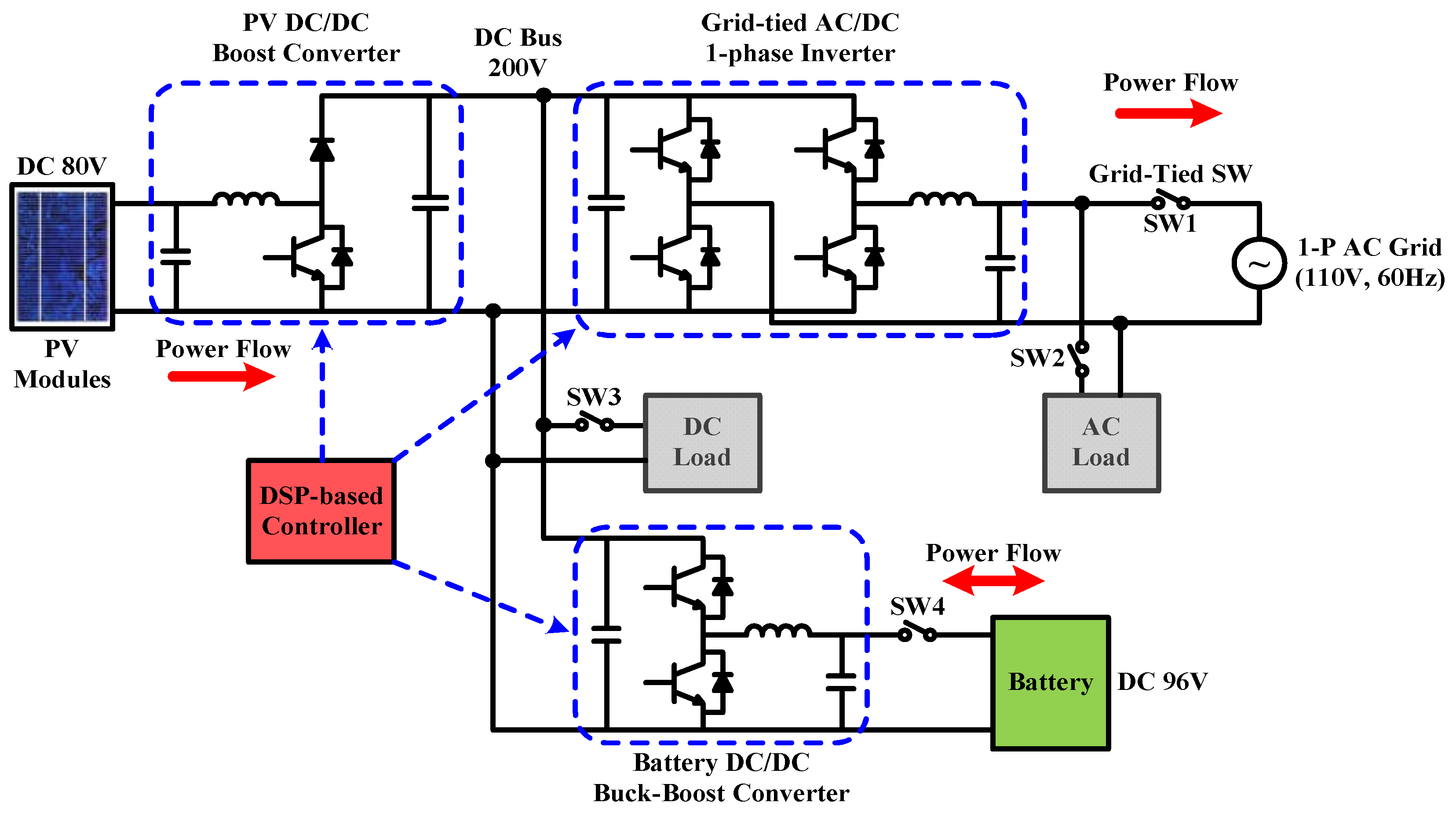
2.1. Operating Mode 1: PV Power Smoothing Mode
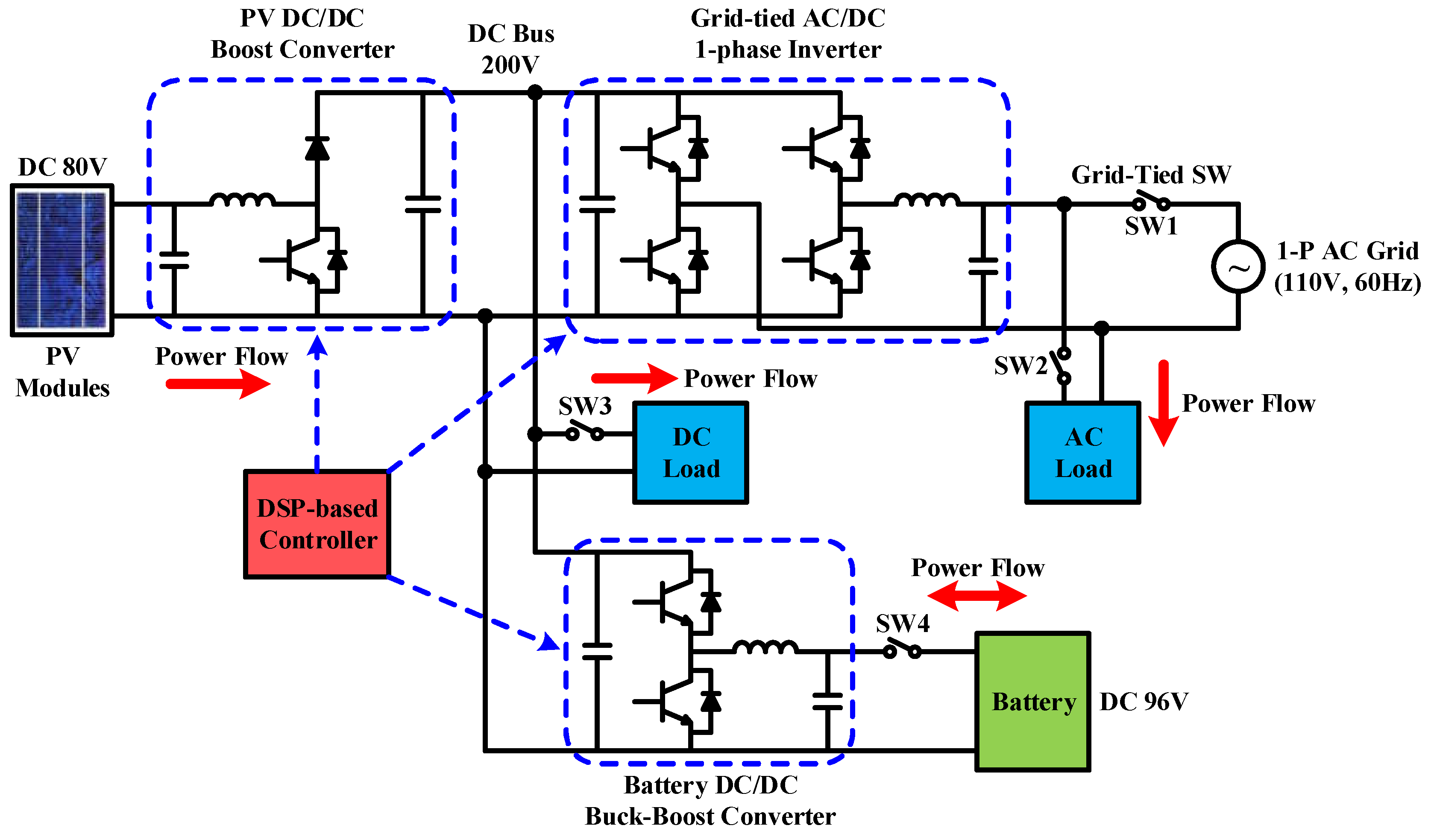
2.2. Operating Mode 2: Peak Power Regulation Mode
3. Quantitative Design of Controllers
3.1. Quantitative Design of Controllers for Single-Phase Inverter
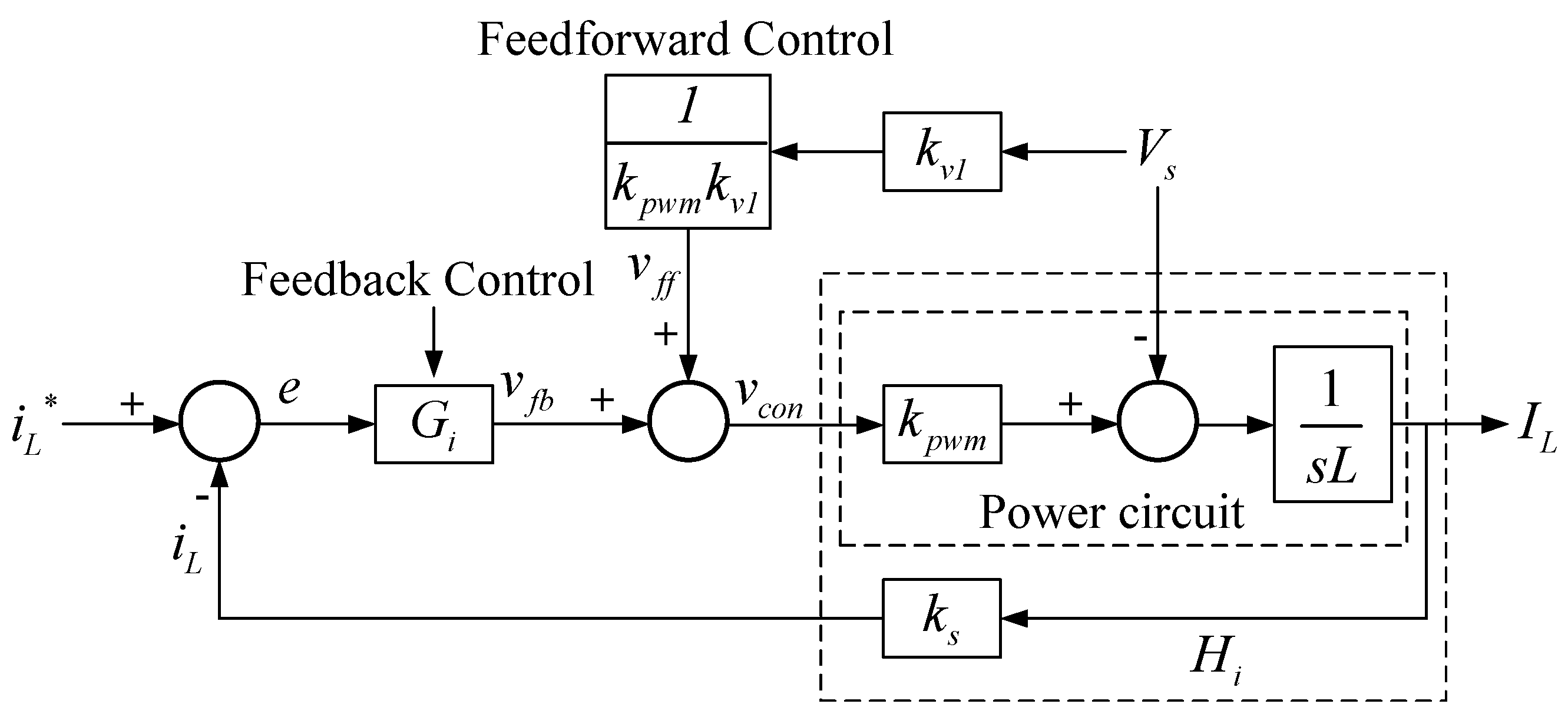
3.1.1. Inner Loop Inductor Current Control
3.1.2. Outer Loop—DC Bus Voltage Controller
- Rated power P: 1 kVA;
- DC bus voltage Vbus: 200 V;
- Grid rated voltage Vs: 110 Vrms;
- Grid voltage frequency fac: 60 Hz;
- Power switching device: TPH3207WS
- Switching frequency fs: 100 kHz;
- Carrier amplitude vt: 5 V;
- AC voltage sensing scale kv1: 0.0062 V/V;
- DC voltage sensing scale kv2: 0.012 V/V;
- AC current sensing scale ks: 0.05 V/A;
- DC bus voltage variation percentage limit: 5%.
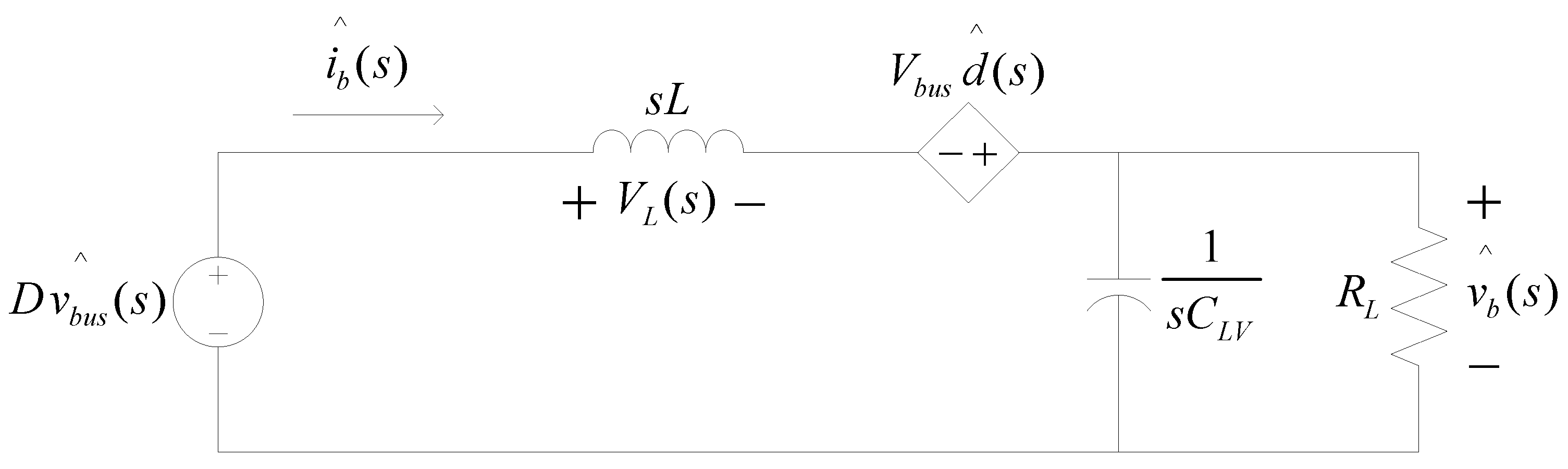
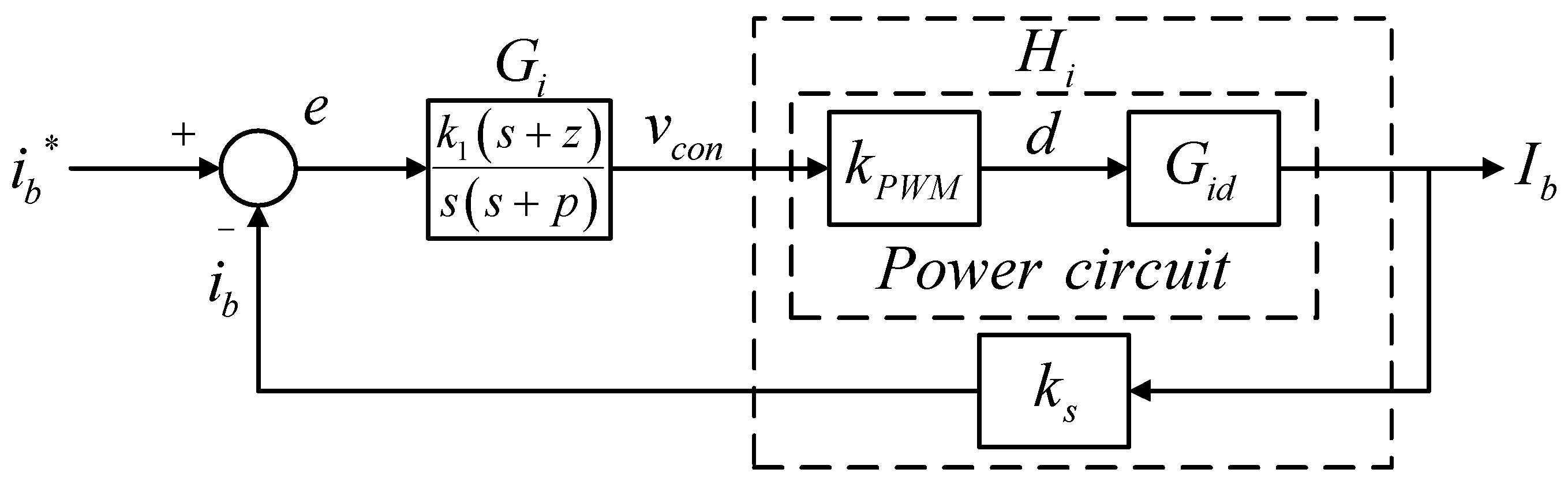
3.2. Quantitative Design of Controllers for Buck–Boost Converter
- Rated power P: 1 kW;
- Battery voltage Vb: 96 V;
- DC bus voltage Vbus: 200 V;
- Power switching device: TPH3207WS
- Switching frequency fs: 100 kHz;
- Carrier amplitude vt: 5 V;
- Current sensing scale ks: 0.05 V/A;
- Inductor current ripple percentage limit: 20% (output current).
Single Loop Inductor Current Controller
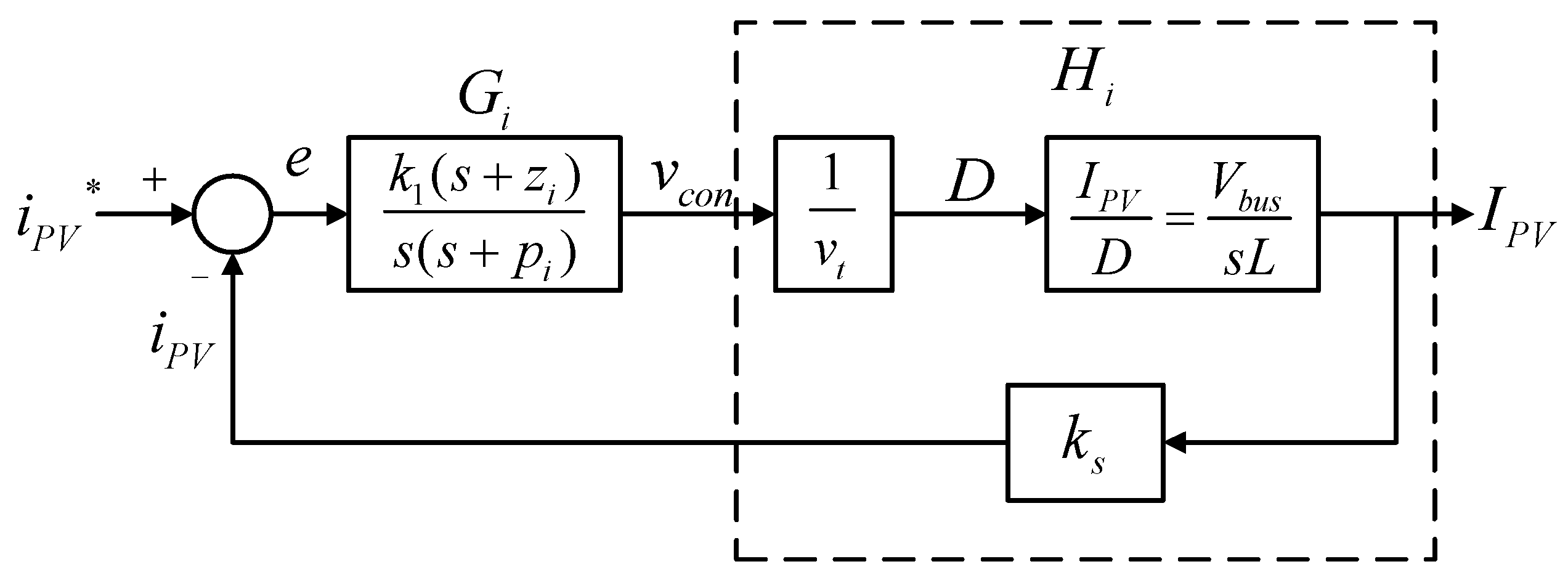
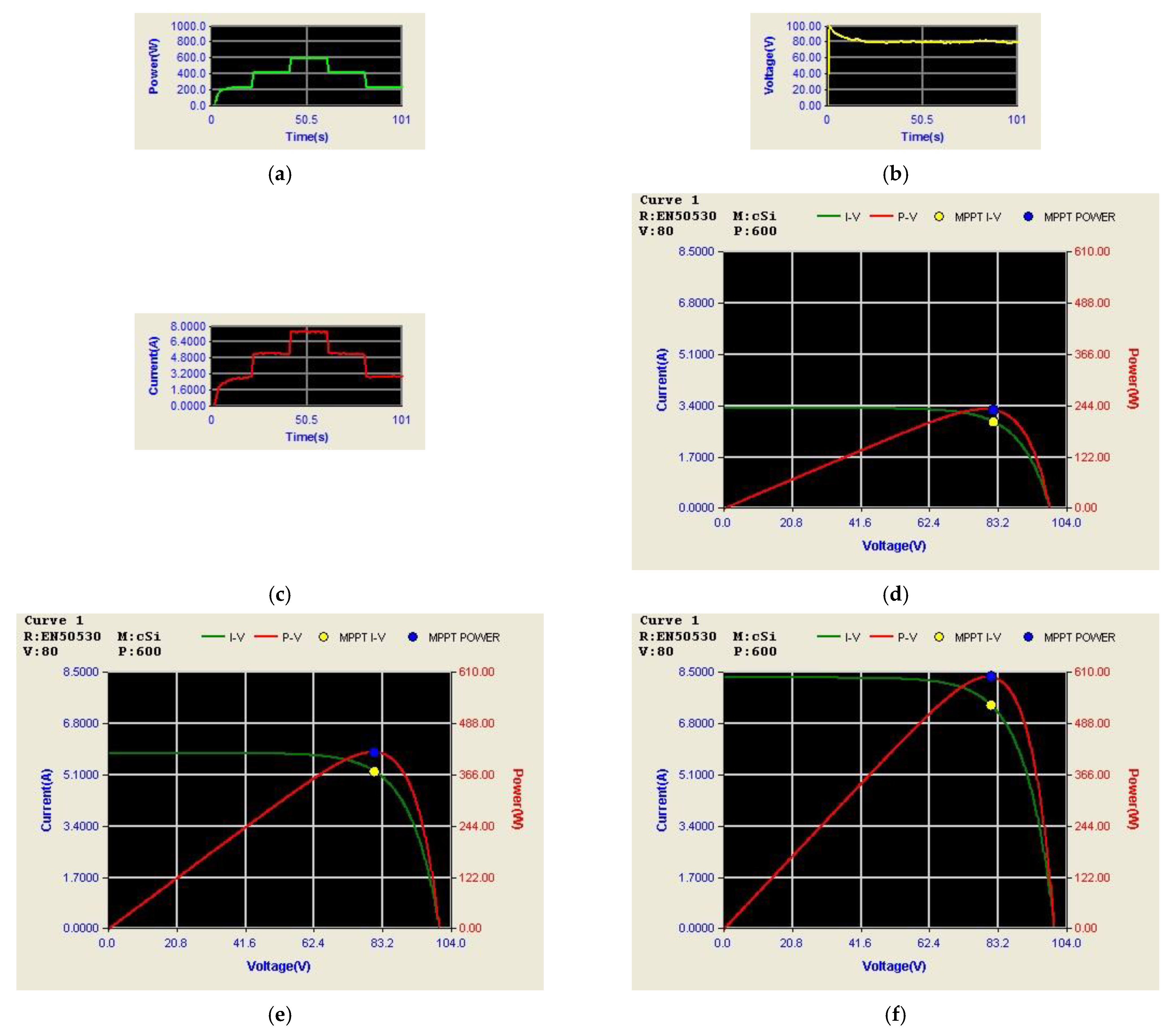
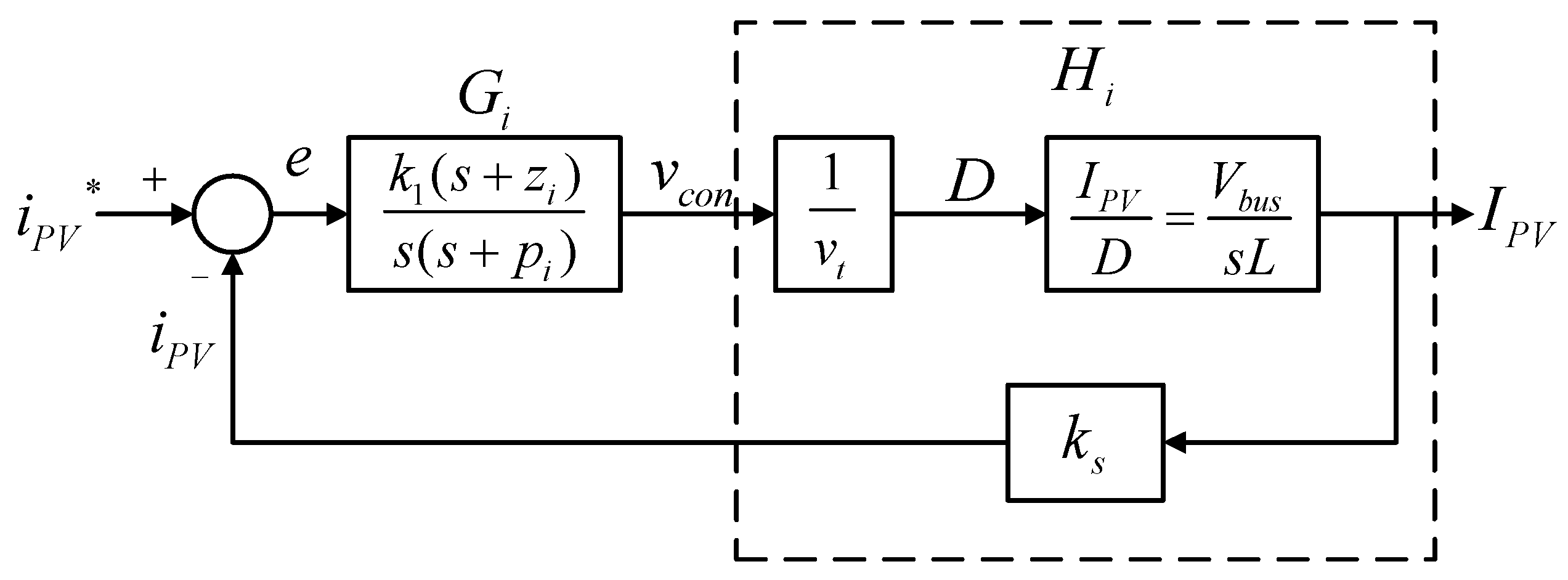
3.3. Quantitative Design of Controllers for PV-Boost Converter
- Rated power P: 600 W;
- Input voltage VPV: 60~100 V;
- DC bus voltage Vbus: 200 V;
- Power switching device: TPH3207WS
- Switching frequency fs: 100 kHz;
- Carrier amplitude vt: 5 V;
- Voltage sensing scale kv: 0.024 V/V;
- Current sensing scale ks: 0.24 V/A;
- Inductor current ripple percentage limit: 20% (output current).
Inner Loop-Inductor Current Control
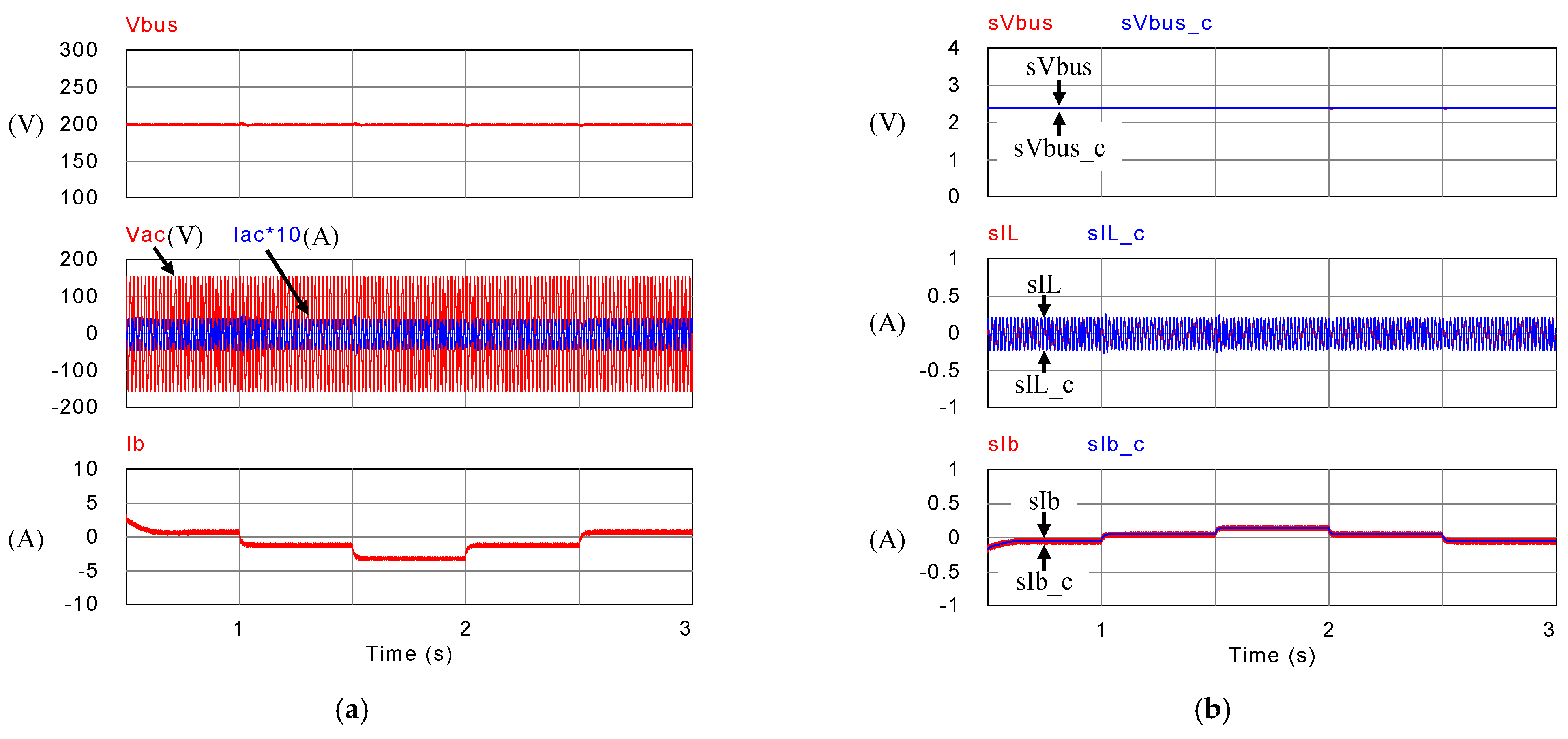
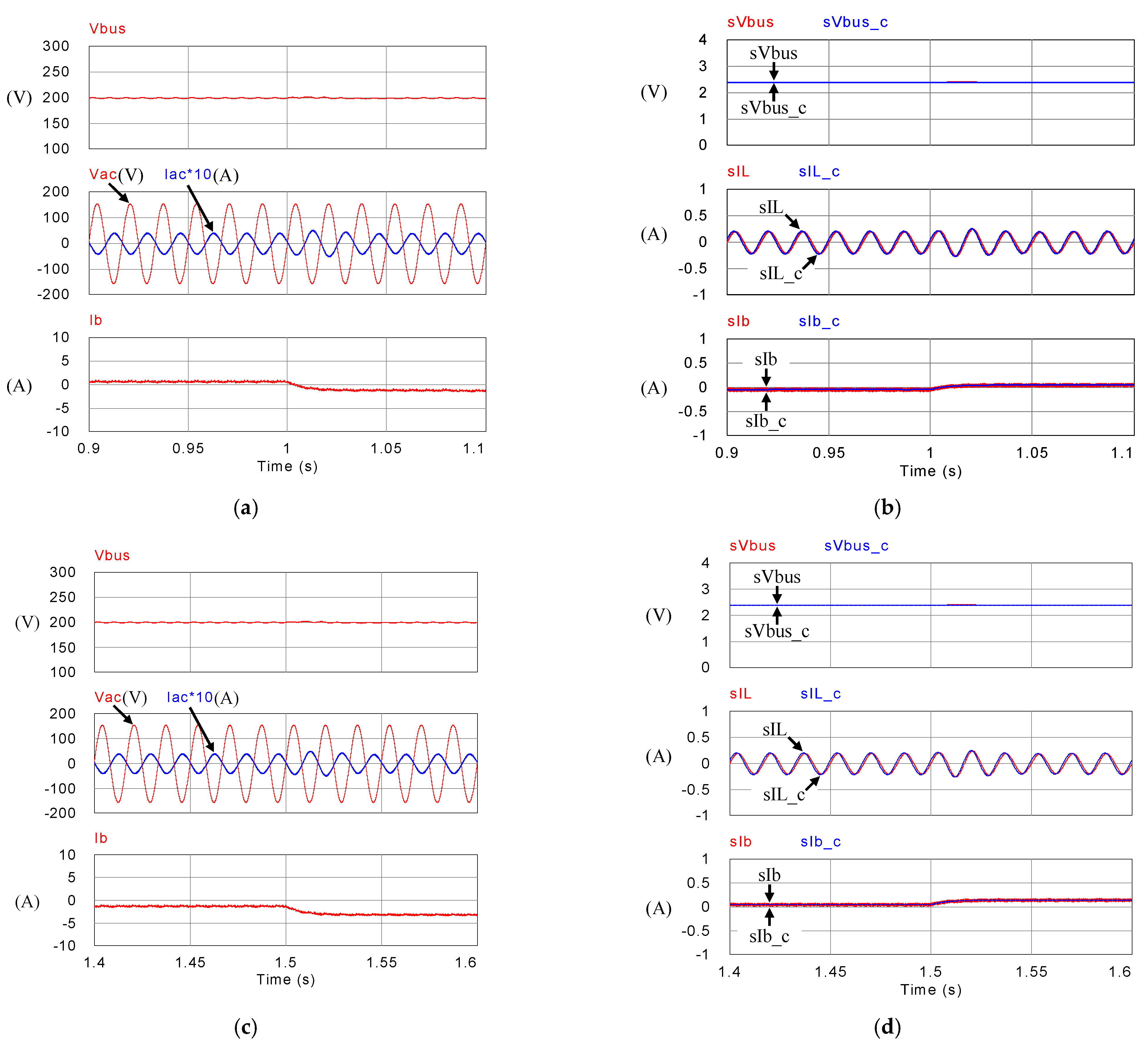
4. Operating Mode Simulation and Analysis
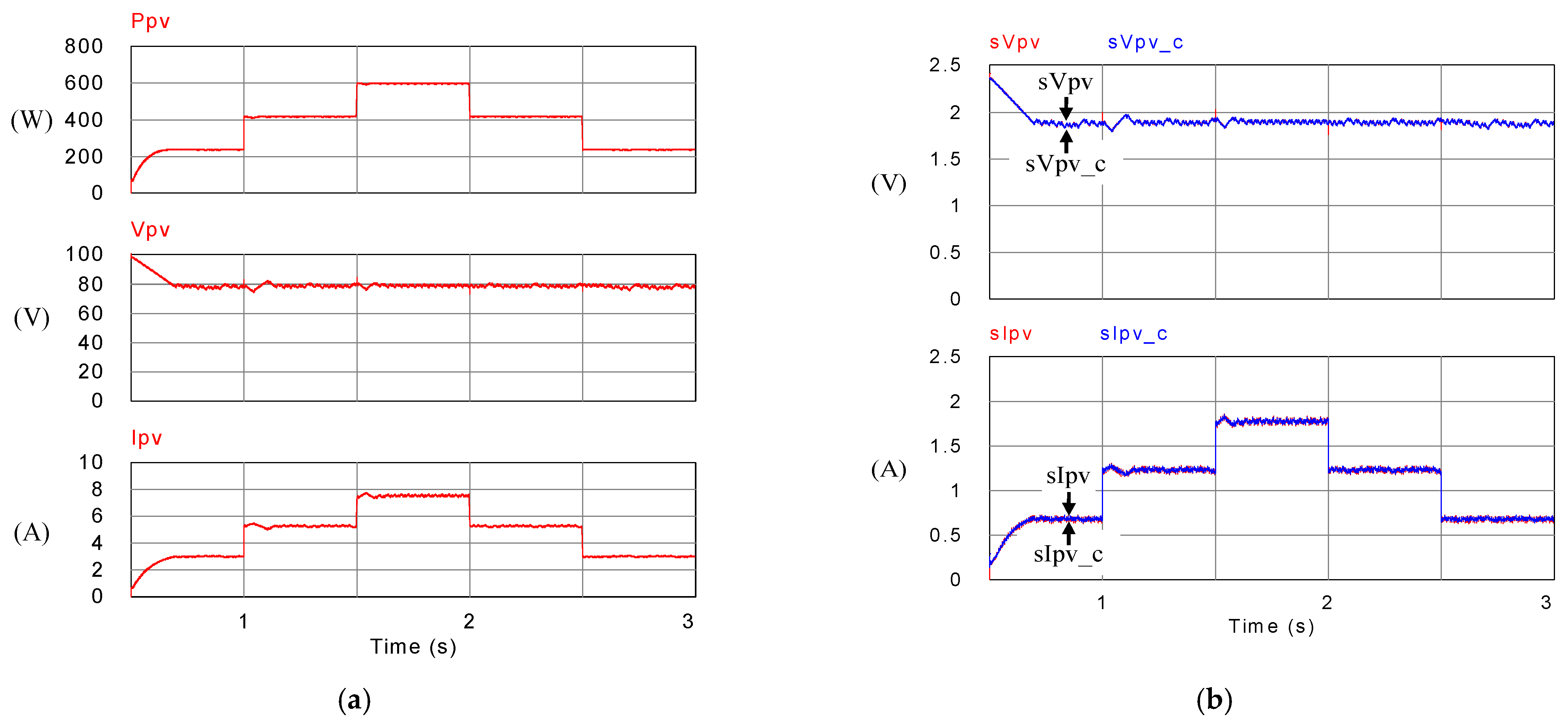
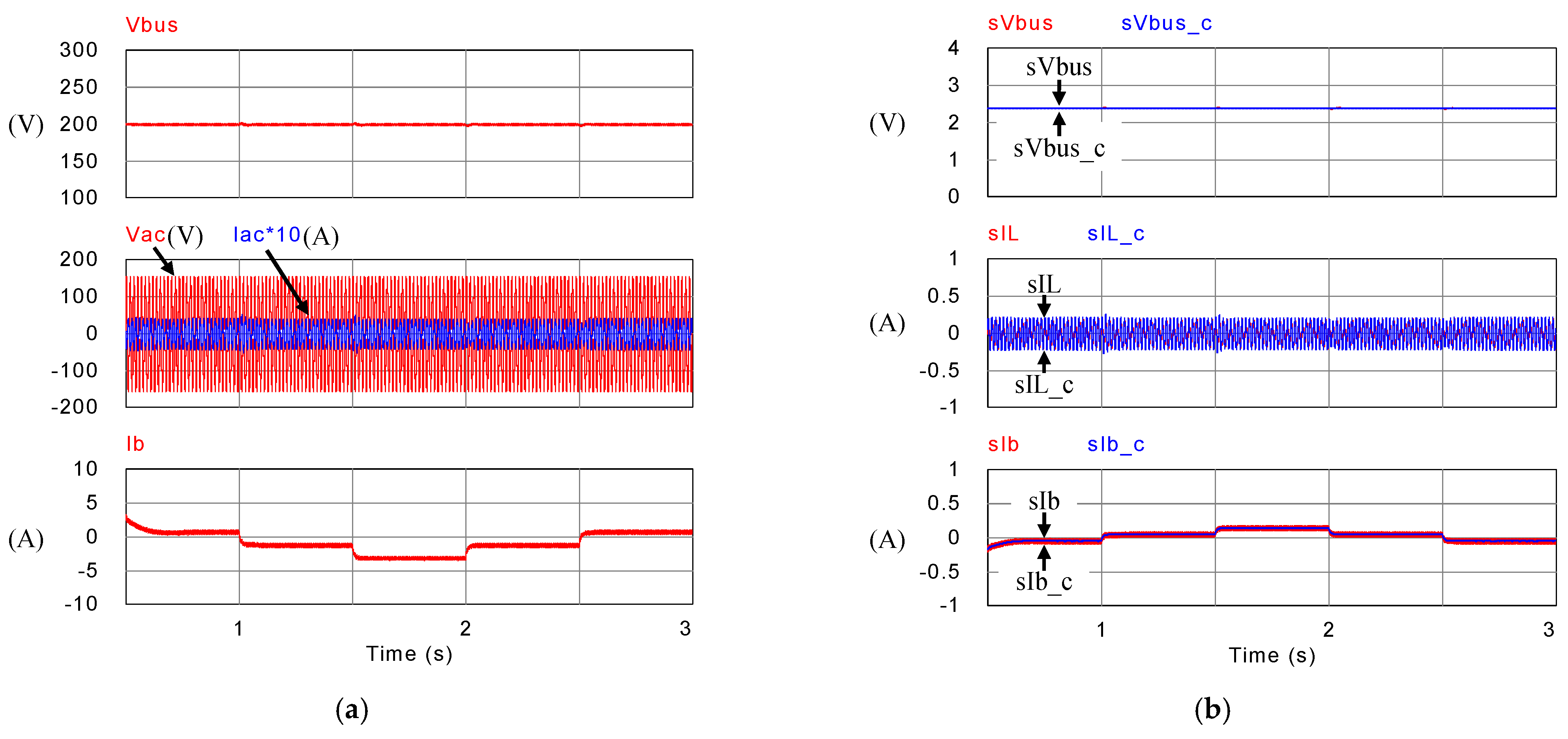
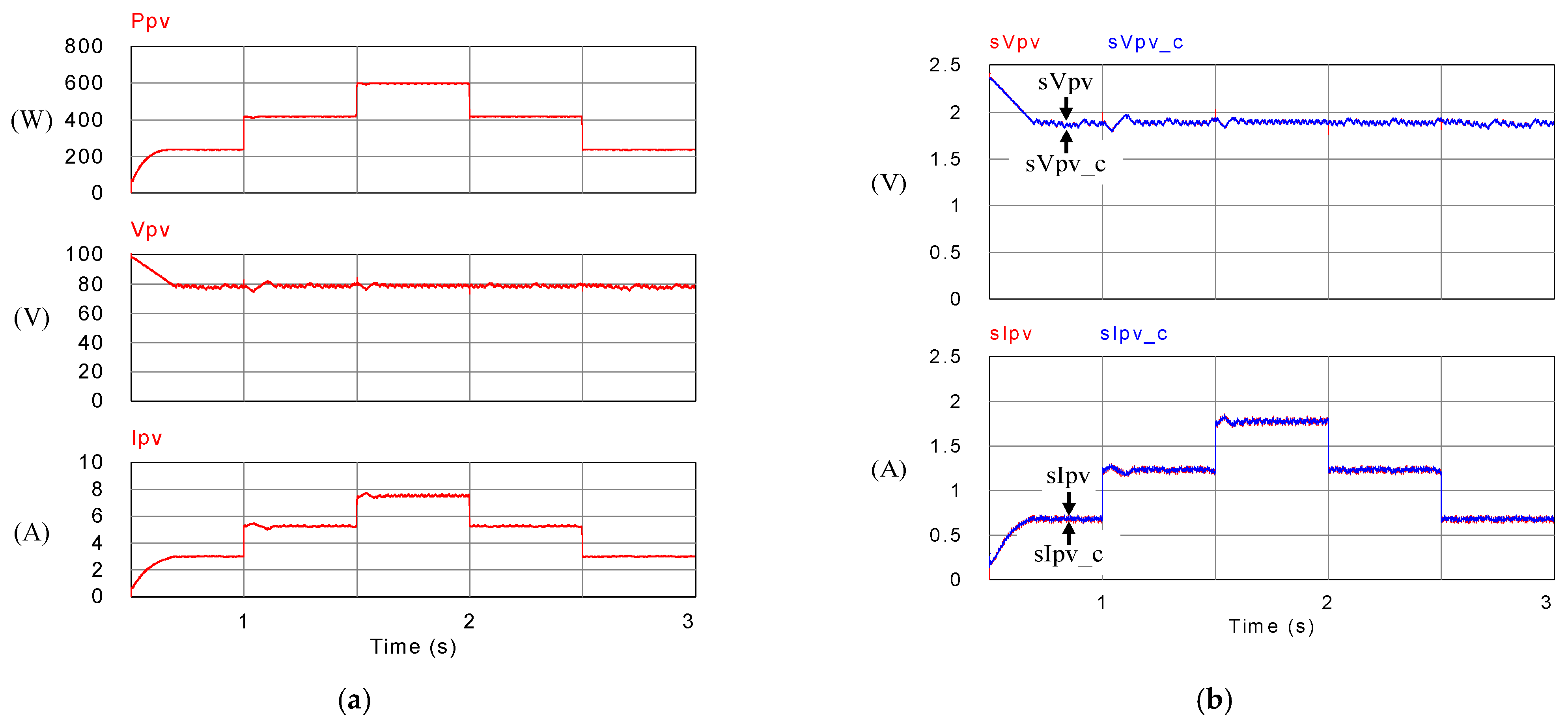
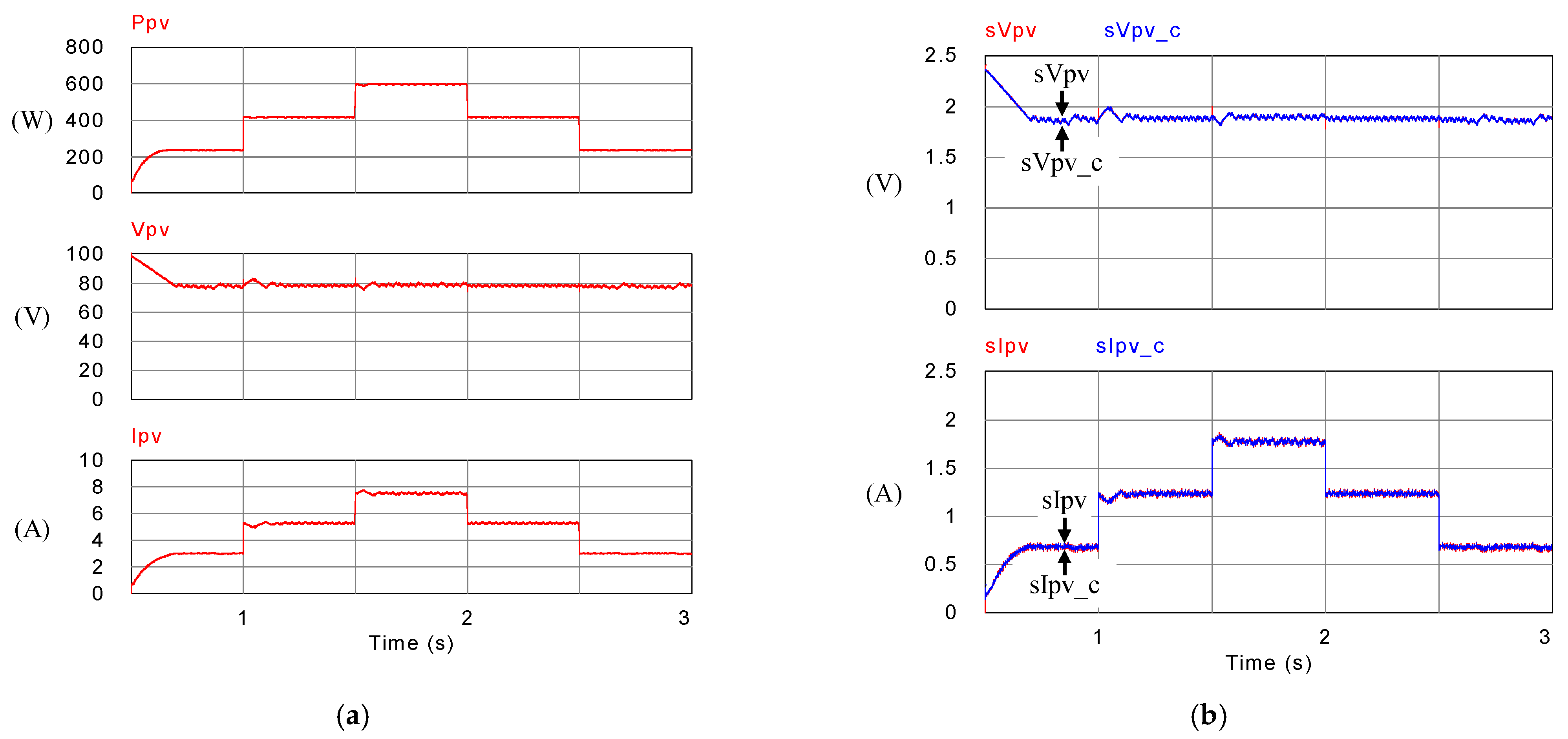
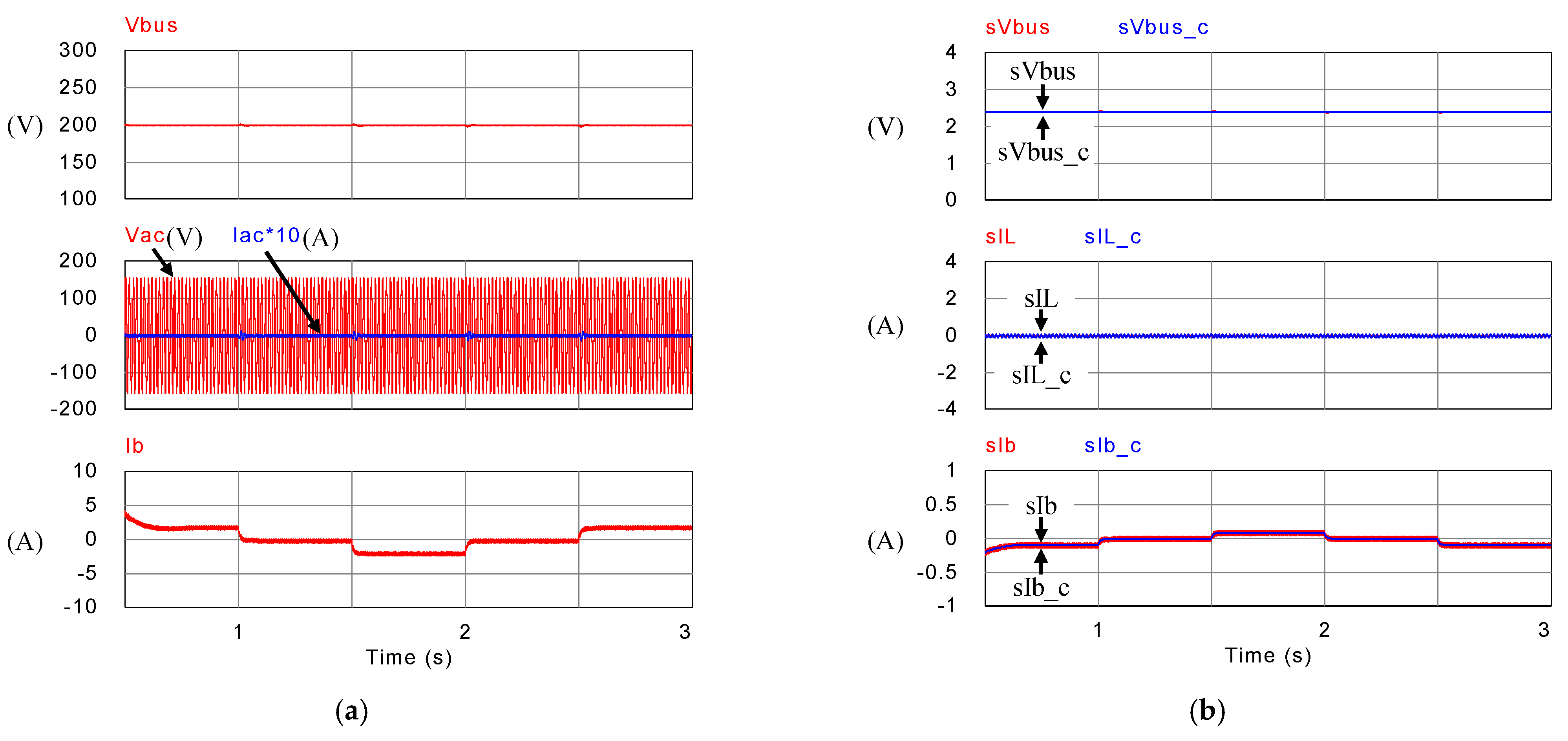
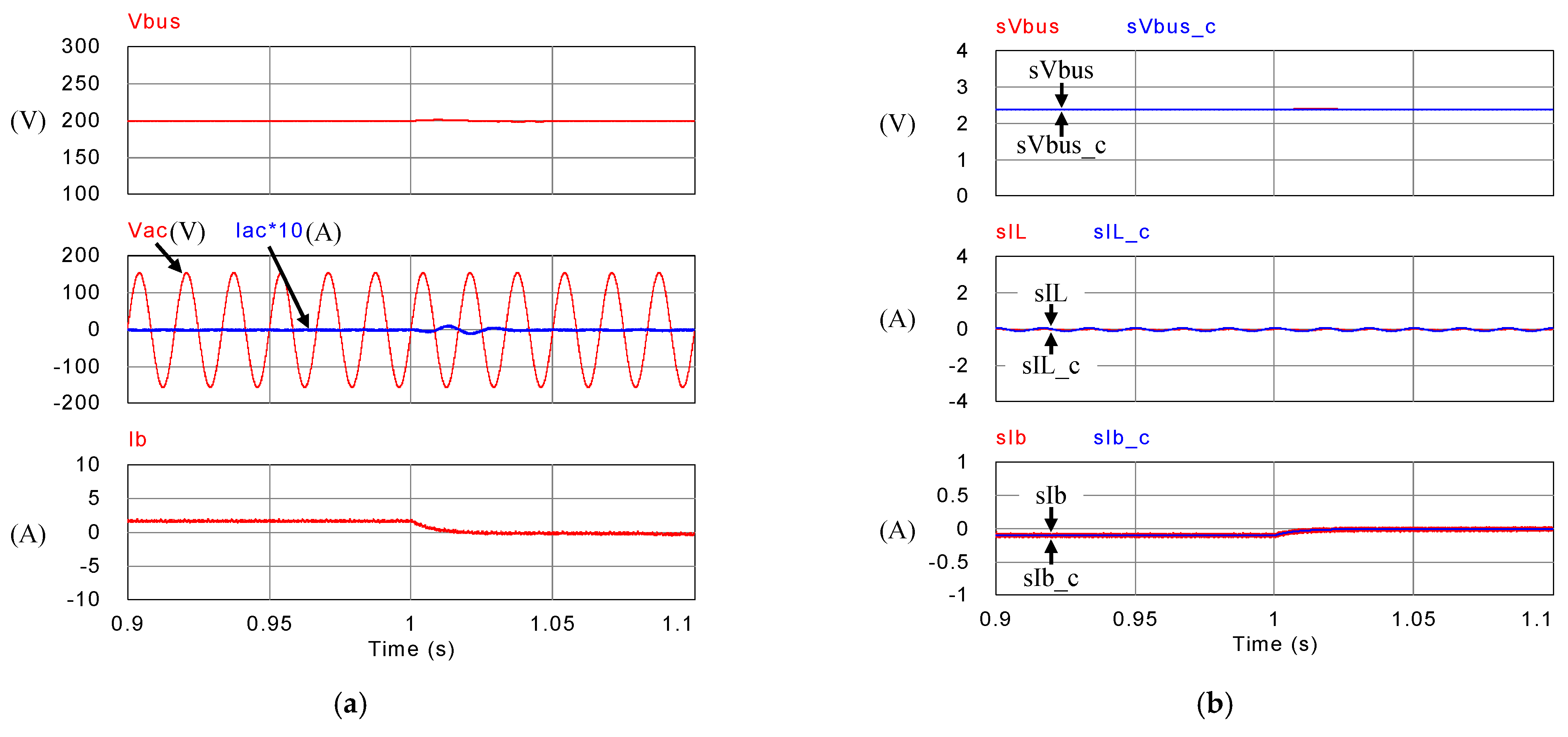
4.1. Operating Mode 1: PV Power Smoothing Mode
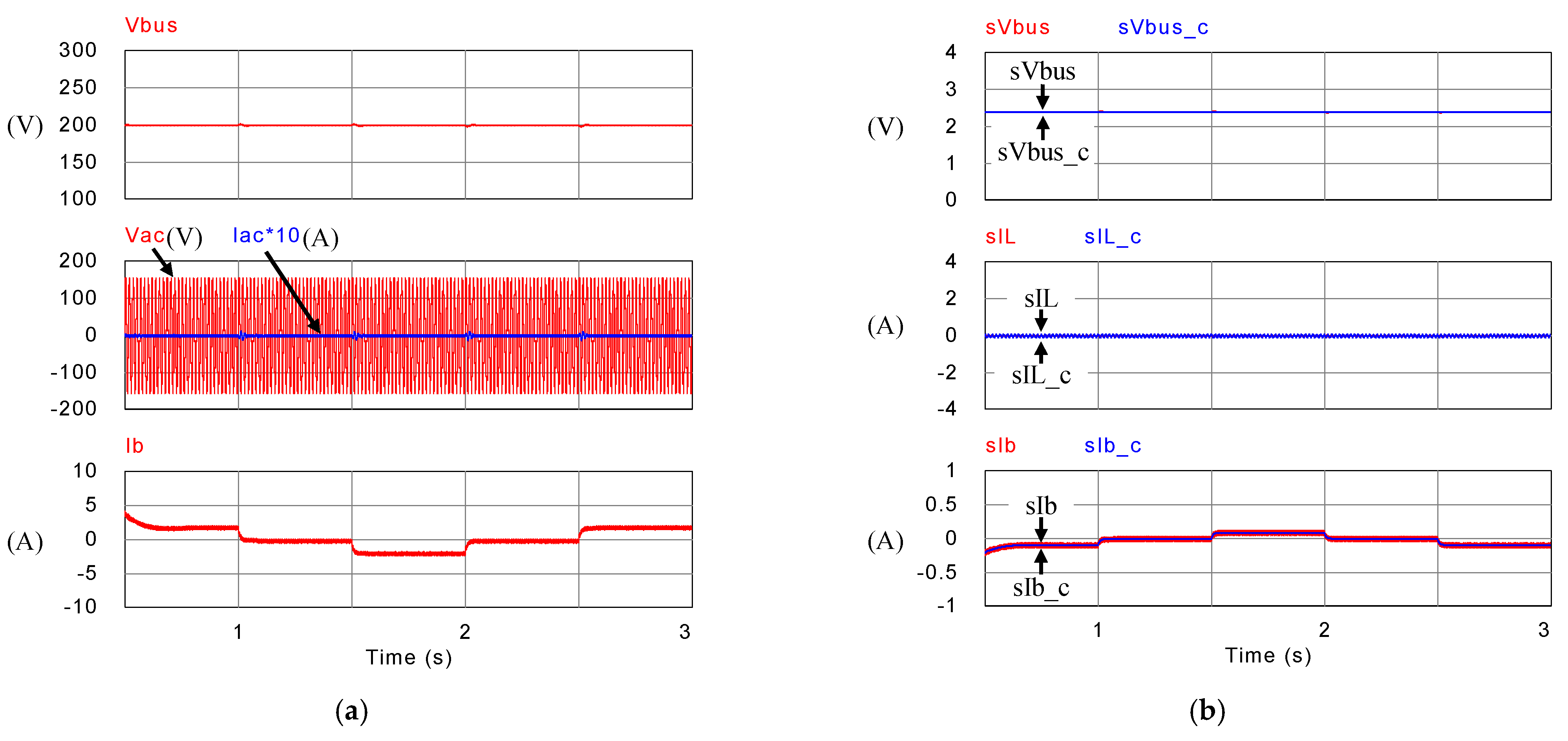
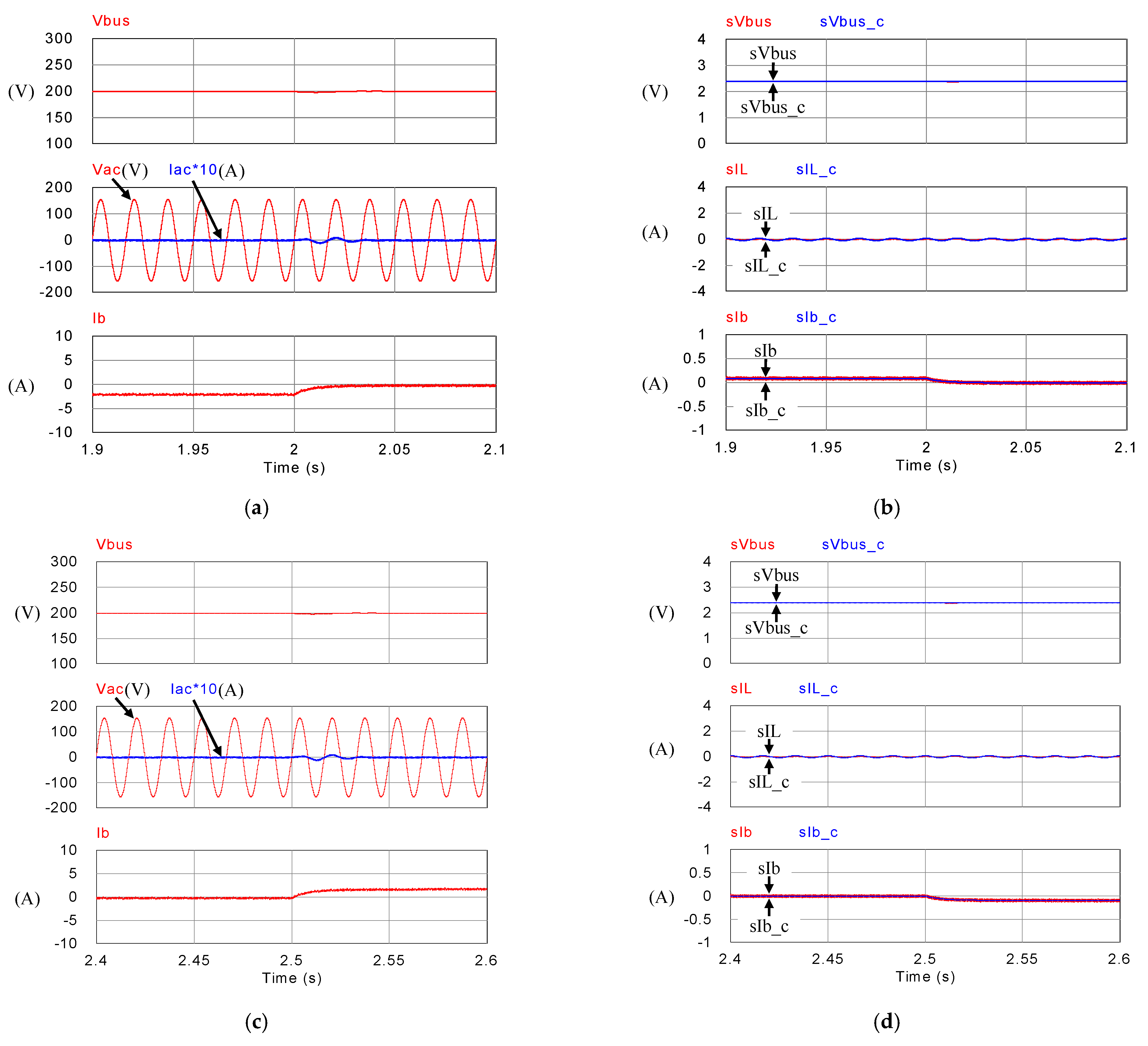
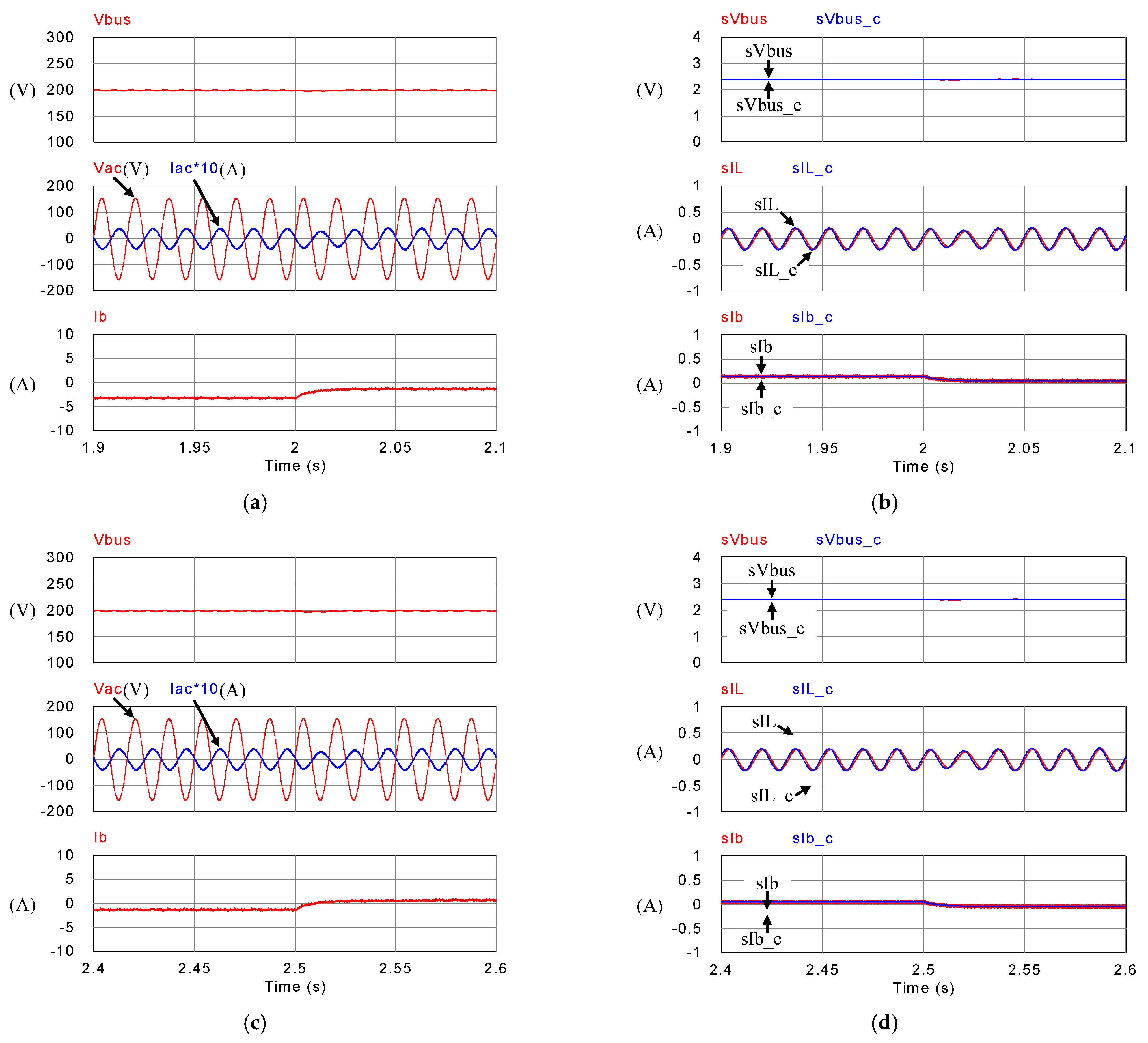
4.2. Operating Mode 2: Peak Power Regularion Mode
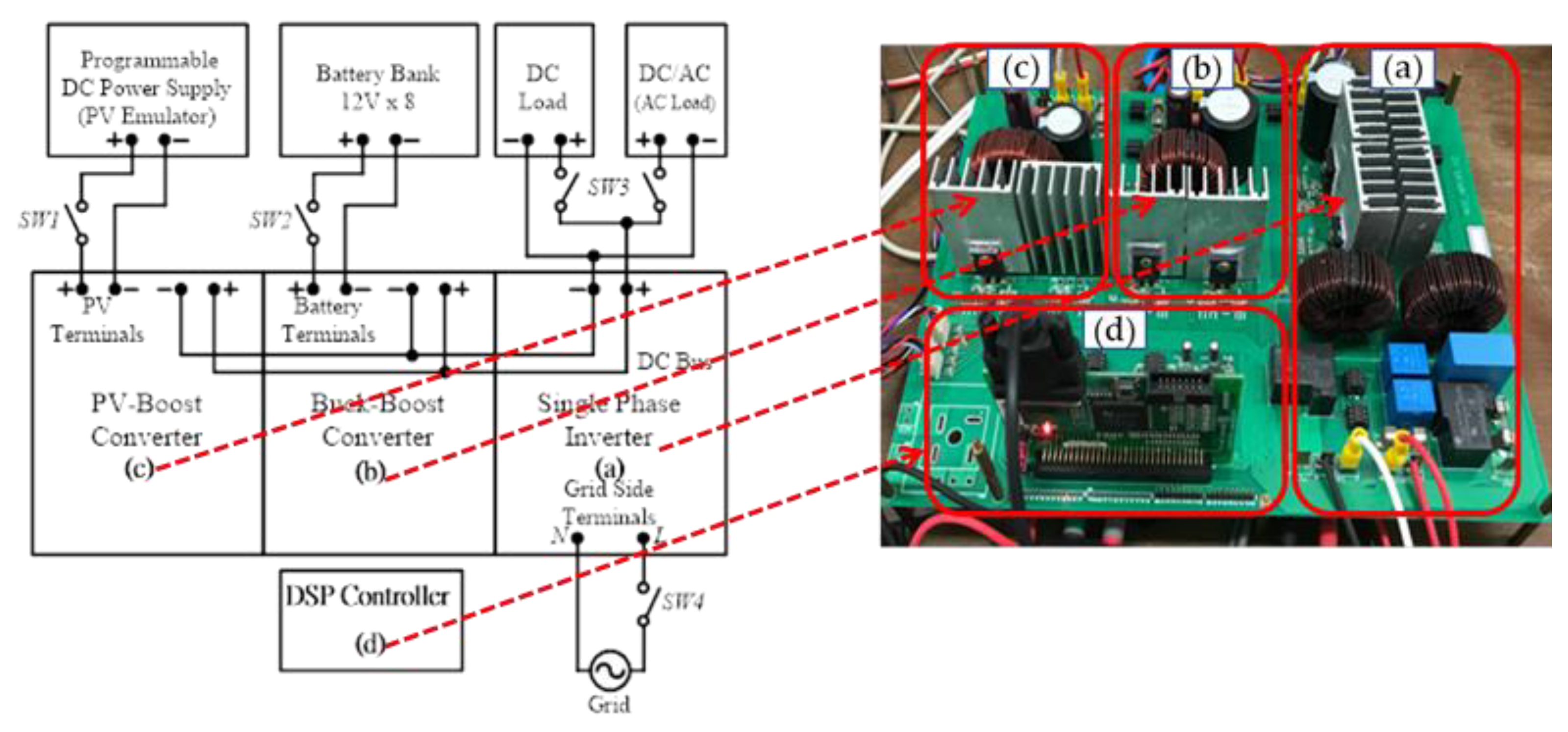
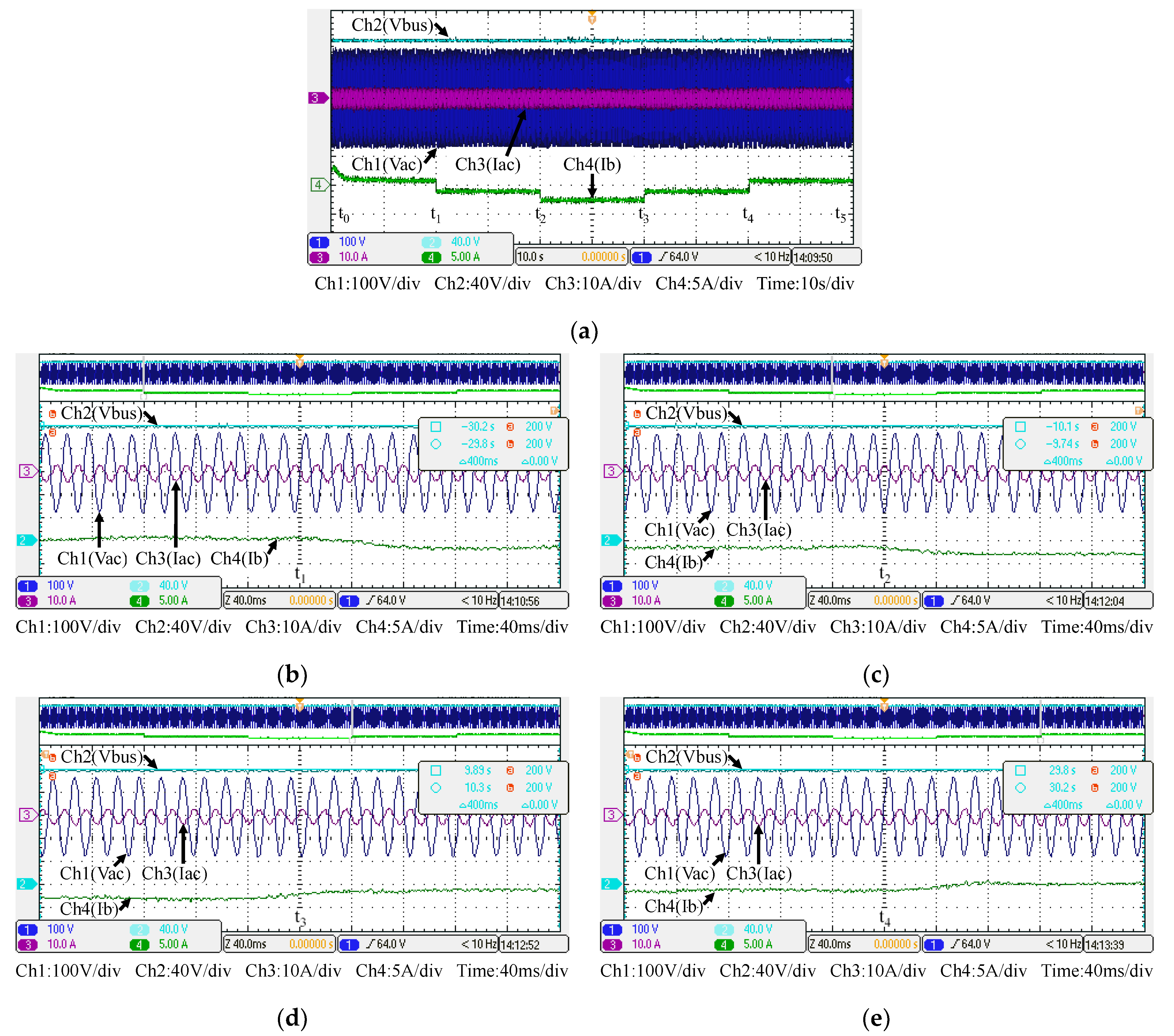
5. Hardware Implementation and Test Results
5.1. Operating Mode 1: PV Power Smoothing Mode
5.2. Operating Mode 2: Peak Power Regulation Mode
6. Discussion
- This is the first time that a complete design case demonstrating three GaN-based power converters with different control functions integrated with a single DSP chip to achieve a reliable, flexible, cost-effective, and multifunctional power interface for renewable power generation systems;
- In this paper, three GaN-based power converters with distinct control functions are smartly integrated with an advanced digital control scheme to achieve a flexible power interface for the grid-tied renewable power generation system embedded with a battery energy storage unit. Advantages of the proposed control scheme, including high control flexibility and high system reliability, are demonstrated via case simulations and hardware tests in two typical operating modes, i.e., PV power smoothing control and peak power regulation modes;
- This paper proposes an advanced power control scheme that efficiently integrates renewable energy-based power generation, an energy storage system, and various loads on a common DC bus. Based on the results obtained from the simulation and hardware tests, the real-time power balance and management functions of the renewable power generation system are automatically achieved with the proposed fast-response, dual-loop DC bus voltage controller;
- In this paper, a systematic design process with detailed design steps of various controllers is presented. This is a great merit for researchers and engineers in the power engineering field.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- U.S. Energy Information Administration (EIA). Available online: https://www.eia.gov/ (accessed on 11 January 2023).
- Badwawi, R.A.; Abusara, M.; Mallick, T. A review of hybrid solar pv and wind energy system. Smart Sci. 2015, 3, 127–138. [Google Scholar] [CrossRef]
- Silva, L.M.R.; Beluco, A.; Daronco, G. A wind PV diesel hybrid system for energizing a sewage station in Santa Rosa, in southern Brazil. IEEE Lat. Am. Trans. 2020, 18, 773–780. [Google Scholar] [CrossRef]
- Pradhan, C.; Senapati, M.K.; Malla, S.G.; Nayak, P.K.; Gjengedal, T. Coordinated Power Management and Control of Standalone PV-Hybrid System With Modified IWO-Based MPPT. IEEE Syst. J. 2021, 15, 3585–3596. [Google Scholar] [CrossRef]
- Wang, R.; Ma, D.; Li, M.J.; Sun, Q.; Zhang, H.; Wang, P. Accurate Current Sharing and Voltage Regulation in Hybrid Wind/Solar Systems: An Adaptive Dynamic Programming Approach. IEEE Trans. Consum. Electron. 2022, 68, 261–272. [Google Scholar] [CrossRef]
- Konneh, K.V.; Masrur, H.; Othman, M.L.; Wahab, N.I.A.; Hizam, H.; Islam, S.Z.; Crossley, P.; Senjyu, T. Optimal Design and Performance Analysis of a Hybrid Off-Grid Renewable Power System Considering Different Component Scheduling, PV Modules, and Solar Tracking Systems. IEEE Access 2021, 9, 64393–64413. [Google Scholar] [CrossRef]
- Bharatee, A.; Ray, P.K.; Ghosh, A. A Power Management Scheme for Grid-connected PV Integrated with Hybrid Energy Storage System. J. Mod. Power Syst. Clean Energy 2022, 10, 954–963. [Google Scholar] [CrossRef]
- Shanthi, P.; Uma, G.; Keerthana, M.S. Effective power transfer scheme for a grid connected hybrid wind/photovoltaic system. IET-RPG 2017, 11, 1005–1017. [Google Scholar] [CrossRef]
- Wang, G.; Ciobotaru, M.; Agelidis, V.G. Power Smoothing of Large Solar PV Plant Using Hybrid Energy Storage. IEEE Trans. Sustain. Energy 2014, 5, 834–842. [Google Scholar] [CrossRef]
- Jayalakshmi, N.S.; Gaonkar, D.N.; Vikash, J.K.; Karthik, R.P. Battery-Ultracapacitor Storage Devices to Mitigate Power Fluctuations for Grid Connected PV System. In Proceedings of the 2015 Annual IEEE India Conference (INDICON), New Delhi, India, 17–20 December 2015. [Google Scholar]
- Awad, A.; Tumar, I.; Hussein, M.; Ghanem, W.; Sa’ed, J.A. PV Output Power Smoothing Using Flywheel Storage System. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017. [Google Scholar]
- Gayathri, N.S.; Senroy, N.; Kar, I.N. Smoothing of wind power using flywheel energy storage system. IET-RPG 2017, 11, 289–298. [Google Scholar] [CrossRef]
- Pan, L.; Gu, J.; Zhu, J.; Qiu, T. Integrated Control of Smoothing Power Fluctuations and Peak shaving in Wind/PV/Energy Storage System. In Proceedings of the 2016 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 27–28 August 2016. [Google Scholar]
- Lin, F.J.; Chiang, H.C.; Chang, J.K.; Chang, Y.R. Intelligent wind power smoothing control with BESS. IET-RPG 2017, 11, 398–407. [Google Scholar] [CrossRef]
- Meng, L.; Dragicevic, T.; Guerrero, J. Adaptive Control of Energy Storage Systems for Power Smoothing Applications. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017. [Google Scholar]
- Zhou, Y.; Yan, Z.; Li, N. A Novel State of Charge Feedback Strategy in Wind Power Smoothing Based on Short-term Forecast and Scenario analysis. IEEE Trans. Sustain. Energy 2017, 8, 870–879. [Google Scholar] [CrossRef]
- Gupta, A.K.; Saxena, R. Review on widely-used MPPT techniques for PV applications. In Proceedings of the 2016 International Conference on Innovation and Challenges in Cyber Security (ICICCS-INBUSH), Noida, India, 3–5 February 2016. [Google Scholar]
- Sawant, F.T.; Bhattar, P.L.; Bhattar, C.L. Review on Maximization of Solar System under Uniform and Non Uniform Conditions. In Proceedings of the 2017 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Kollam, India, 20–21 April 2017. [Google Scholar]
- Ayoub, E.; Karami, N. Review on the charging techniques of a li-ion battery. In Proceedings of the 2015 Third International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), Beirut, Lebanon, 29 April–1 May 2017. [Google Scholar]
- Vu, V.B.; Doan, V.T.; Pham, V.L.; Choi, W. A New Method to Implement the Constant Current Constant Voltage Charge of the Inductive Power Transfer System for Electric Vehicle Applications. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Busan, Korea, 1–4 June 2016. [Google Scholar]
- Weng, Q.; Xiao, J.; Tan, Y.; Fei, L.; Wang, Y.; Wu, X. A New Charging Method for Directional DC-DC Converters Based on MAS Theory. In Proceedings of the 2016 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016. [Google Scholar]
- Chuang, Y.C.; Chuang, H.S.; Wu, J.H. A Sinusoidal Charging Strategy for Battery Energy Storage Systems Use in Light Electric Vehicles. In Proceedings of the 2016 IEEE Industry Applications Society Annual Meeting, Portland, OR, USA, 2–6 October 2016. [Google Scholar]
- Chen, L.R.; Hsu, R.C.; Liu, C.S. A Design of a Grey-Predicted Li-Ion Battery Charge System. IEEE Trans. Ind. Electron. 2008, 55, 3692–3701. [Google Scholar] [CrossRef]
- Hsieh, G.C.; Chen, L.R.; Huang, K.S. Fuzzy-Controlled Li–Ion Battery Charge System with Active State-of-Charge Controller. IEEE Trans. Ind. Electron. 2001, 48, 585–593. [Google Scholar] [CrossRef]
- Can, E.; Sayan, H.H. A novel SSPWM controlling inverter running nonlinear device. Electr. Eng. 2018, 100, 39–46. [Google Scholar] [CrossRef]
- Can, E. The design and experimentation of the new cascaded DC-DC boost converter for renewable energy. Int. J. Electron. 2019, 106, 1374–1393. [Google Scholar] [CrossRef]
- Can, E. The levels effect of the voltage generated by an inverter with partial source on distortion. Int. J. Electron. 2020, 107, 1414–1435. [Google Scholar] [CrossRef]
- Can, E. The inverter with reverse connected double converter driving unbalanced loads. Int. J. Model. Simul. 2022, 42, 217–226. [Google Scholar] [CrossRef]
- Ma, C.-T.; Hsieh, C.L. Investigation on Hybrid Energy Storage Systems and Their Application in Green Energy Systems. Electronics 2020, 9, 1907. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, C.-T.; Yao, B.-H. Design and Implementation of an Integrated Control Scheme for GaN-Based Multiple Power Converters. Micromachines 2023, 14, 833. https://doi.org/10.3390/mi14040833
Ma C-T, Yao B-H. Design and Implementation of an Integrated Control Scheme for GaN-Based Multiple Power Converters. Micromachines. 2023; 14(4):833. https://doi.org/10.3390/mi14040833
Chicago/Turabian StyleMa, Chao-Tsung, and Bing-Hong Yao. 2023. "Design and Implementation of an Integrated Control Scheme for GaN-Based Multiple Power Converters" Micromachines 14, no. 4: 833. https://doi.org/10.3390/mi14040833
APA StyleMa, C.-T., & Yao, B.-H. (2023). Design and Implementation of an Integrated Control Scheme for GaN-Based Multiple Power Converters. Micromachines, 14(4), 833. https://doi.org/10.3390/mi14040833