
FOSS-Based Method for Thin-Walled Structure Deformation Perception and Shape Reconstruction


Abstract
1. Introduction
- (1)
- For the problem of sensor arrangement in thin-walled structures, the idea of using double FBGs for each measuring point is proposed to improve the accuracy of deformation perception of thin-walled structures, and the influence of sensor placement on the accuracy of deformation prediction is quantitatively analyzed by using the Ansys finite-element model;
- (2)
- For the problem of outliers in the measurement process, the OCSVM (one-class support vector machine) model is used, which not only effectively eliminates the outliers and ensures the accuracy of shape reconstruction, but also provides a basis for judging abnormal conditions such as structural damage;
- (3)
- Aiming at the shape-reconstruction error of thin-walled structures, analyze the prediction error of the neural network model, and the calculation error of the interpolation method for the shape-reconstruction error of thin-walled structures in this paper, and provide a reliable basis for improving the accuracy of the shape-reconstruction method.
2. FOSS and System Simulation
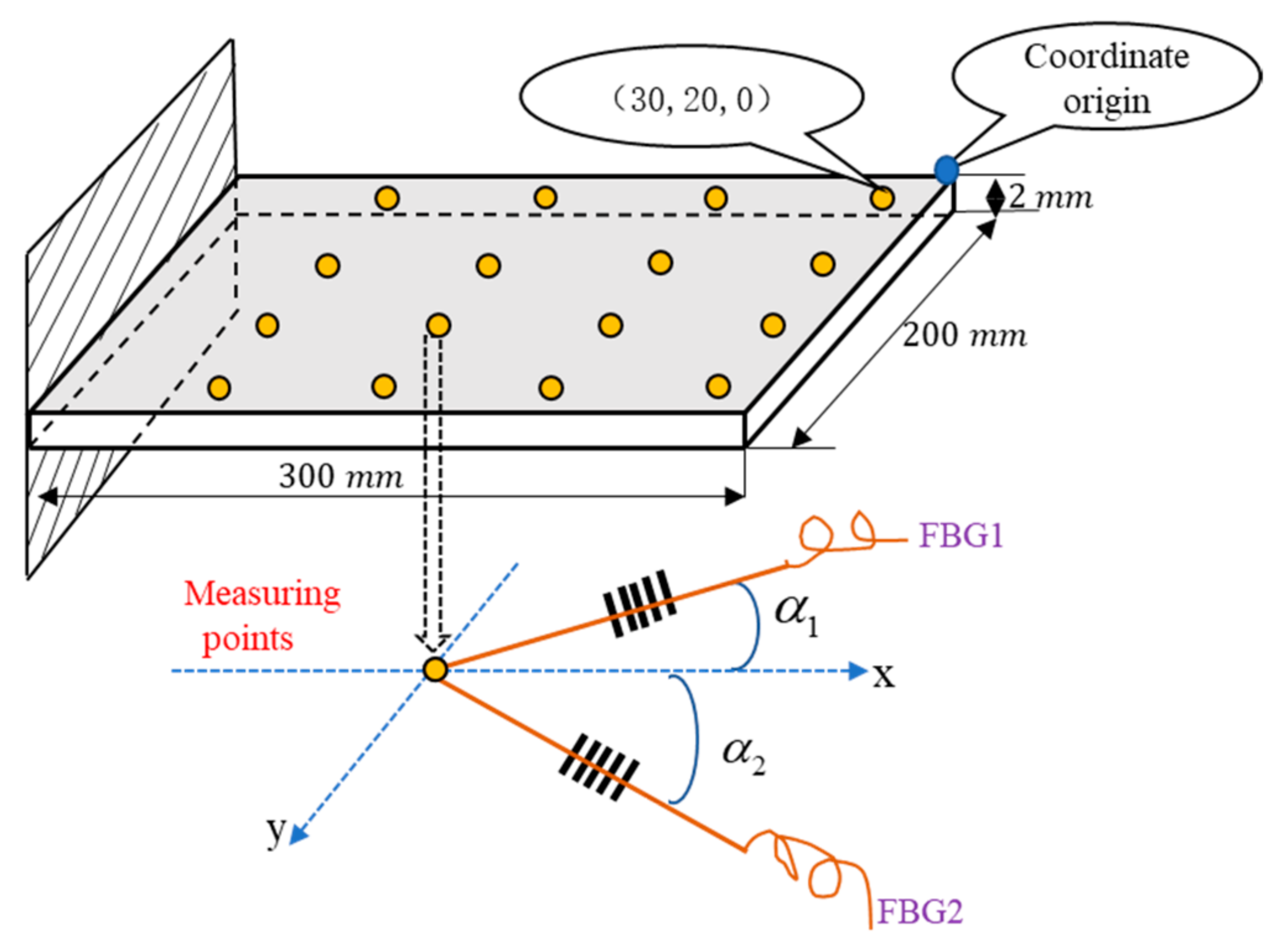
2.1. FBG Sensor Layout
2.2. Simulation of Deformation Perception System Based on FOSS
3. Machine Learning Methods
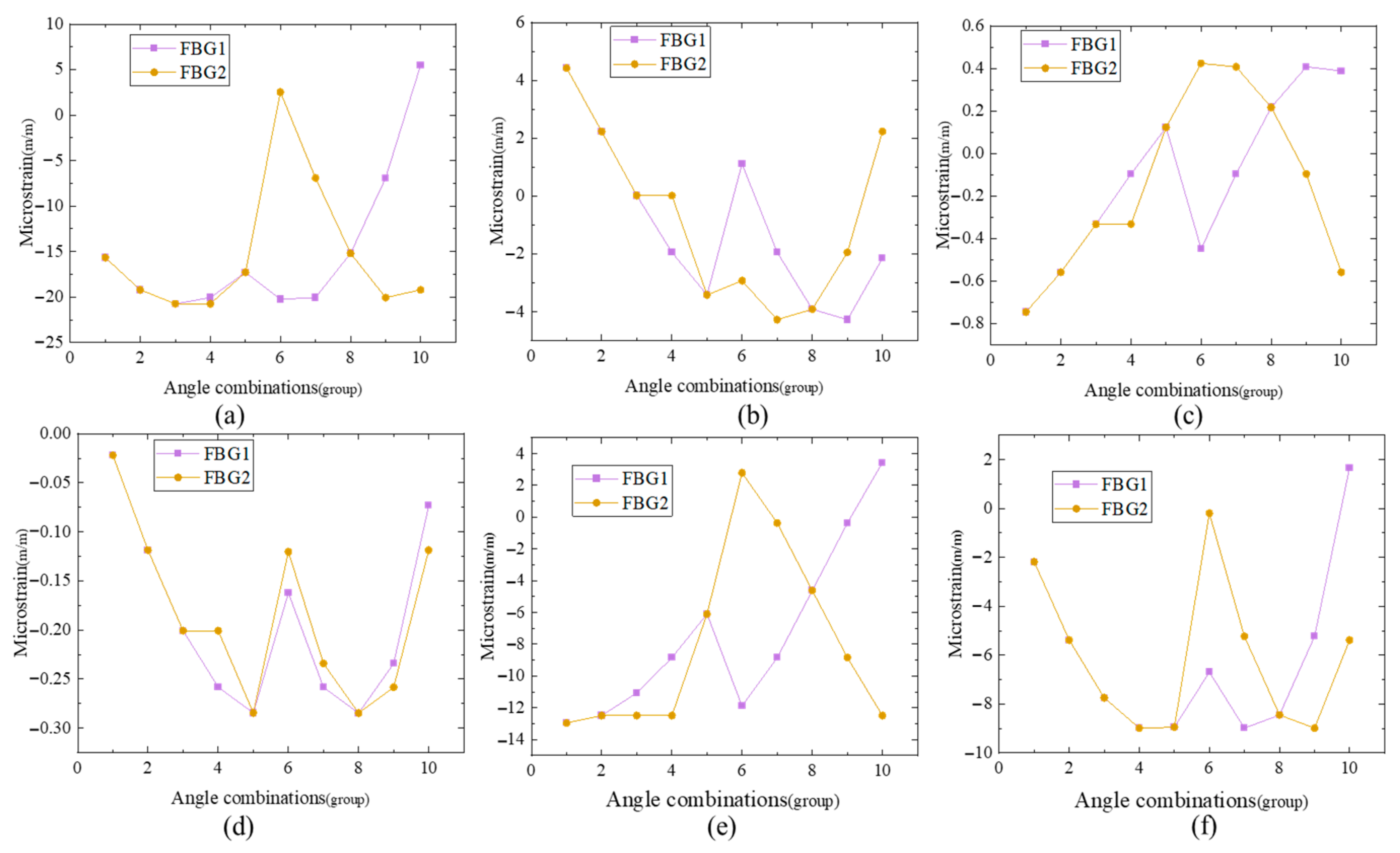
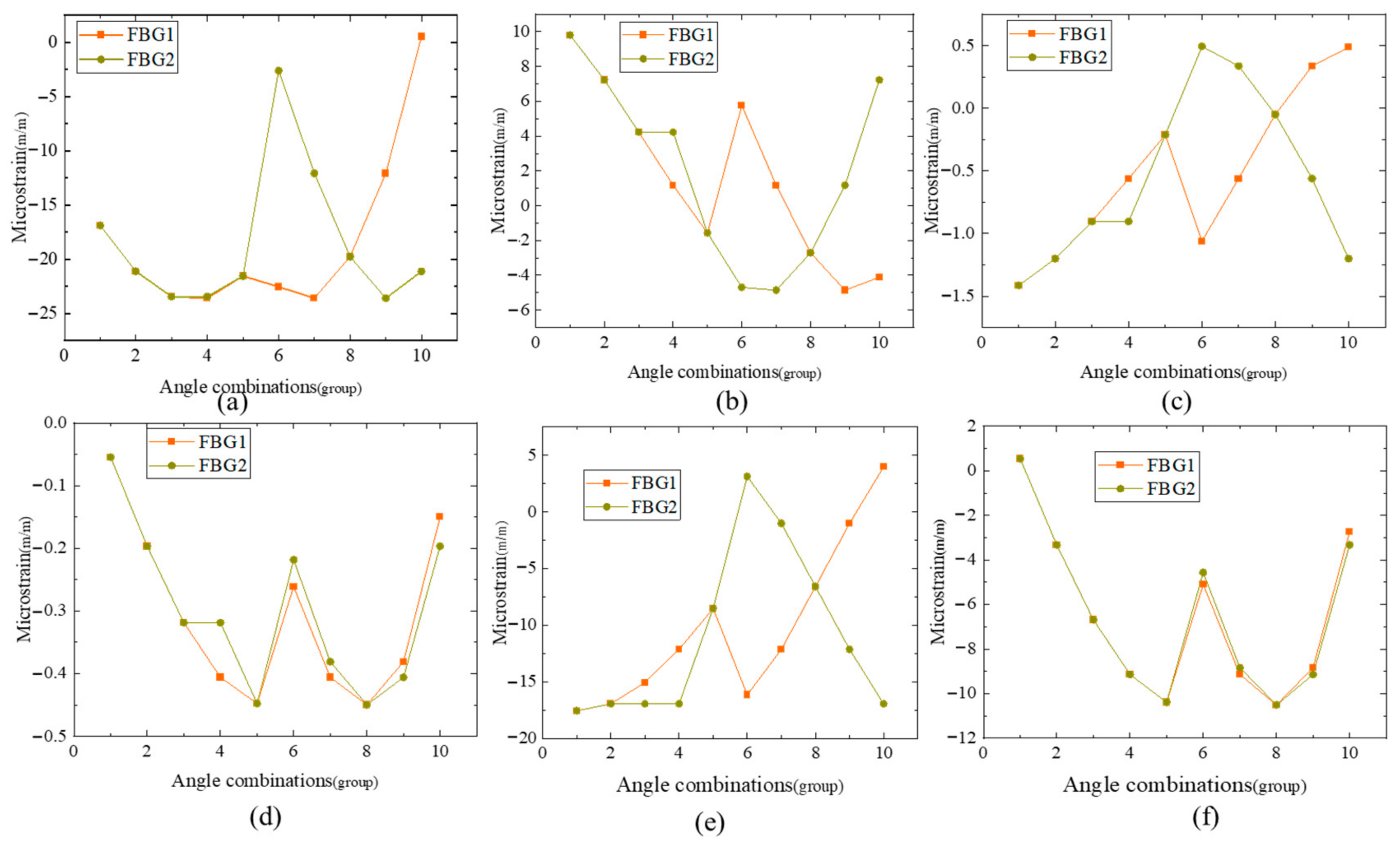
3.1. Data Preparation
3.2. Data Preprocessing
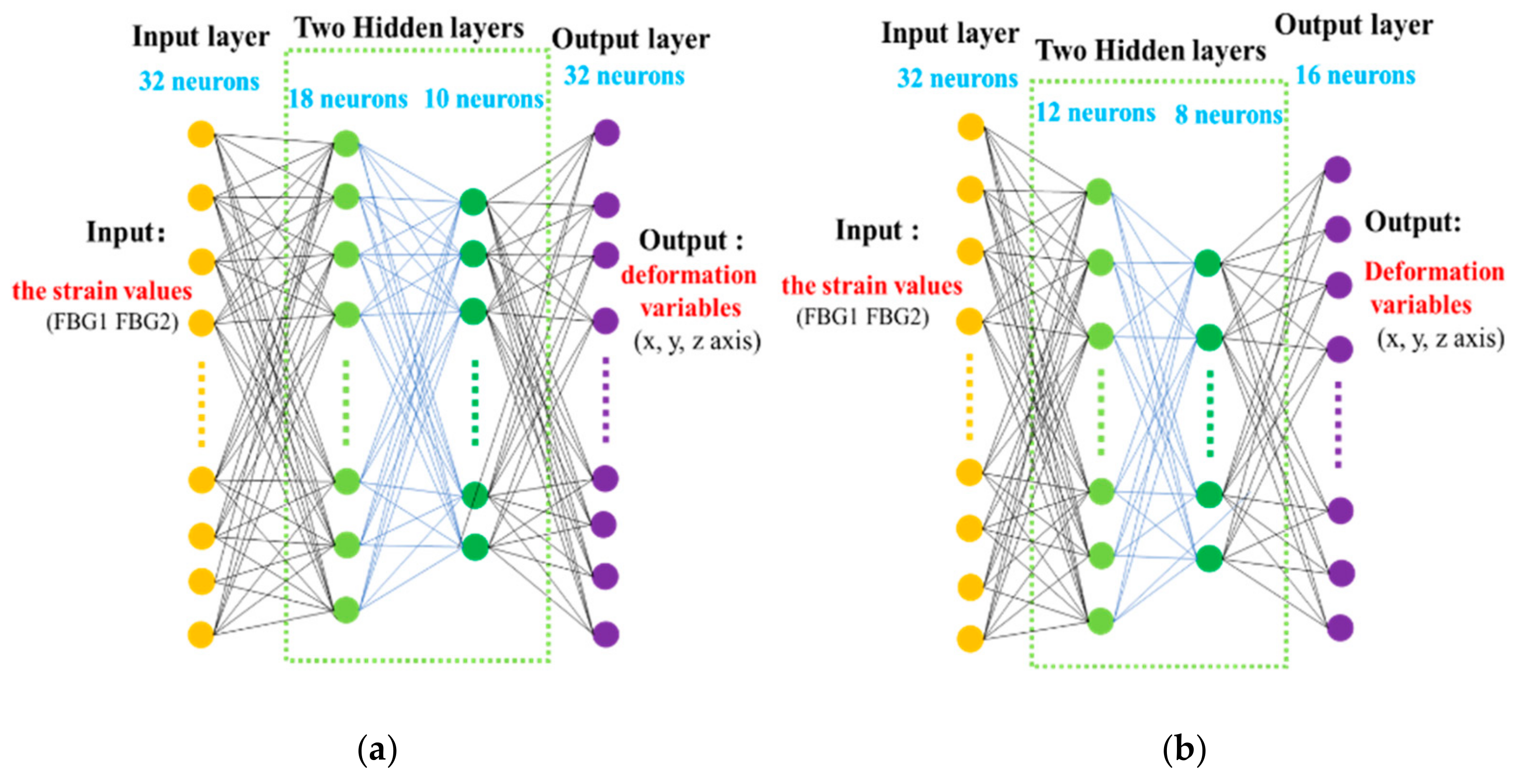
3.3. Establishment of the BP Neural Network Model
3.3.1. Model Selection
3.3.2. Hyperparameter Setting
3.3.3. Model Evaluation
3.4. Prediction of New Samples
4. Experiments and Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bakunowicz, J.; Meyer, R. In-flight wing deformation measurements on a glider. Aeronaut. J. 2016, 120, 1917–1931. [Google Scholar] [CrossRef]
- Burner, A.W.; Liu, T.S. Videogrammetric model deformation measurement technique. J. Aircr. 2001, 38, 745–754. [Google Scholar] [CrossRef]
- Kurita, M.; Koike, S.; Nakakita, K.; Masui, K. In-Flight Wing Deformation Measurement. In Proceedings of the 51st Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition (AIAA), Dallas, TX, USA, 7–10 January 2013; Volume 1, p. 50. [Google Scholar]
- Wang, H. Marker identification technique for deformation measurement. Adv. Mech. Eng. 2015, 5, 631–645. [Google Scholar] [CrossRef]
- Liu, Y.; Ge, Z.D.; Yuan, Y.T.; Su, X.; Guo, X.; Suo, T.; Yu, Q.F. Wing deformation measurement using the stereo-vision methods in the presence of camera movements. Aerosp. Sci. Technol. 2021, 119, 14. [Google Scholar] [CrossRef]
- Abdollahzadeh, M.A.; Ali, H.Q.; Yildiz, M.; Kefal, A. Experimental and numerical investigation on large deformation reconstruction of thin laminated composite structures using inverse finite element method. Thin-Walled Struct. 2022, 178, 19. [Google Scholar] [CrossRef]
- Gherlone, M.; Cerracchio, P.; Mattone, M.; Sciuva, M.; Di, A.T. Shape sensing of 3D frame structures using an inverse Finite Element Method. Solids Struct. 2012, 49, 3100–3112. [Google Scholar] [CrossRef]
- Kefal, A.; Yildiz, M. Modeling of sensor placement strategy for shape sensing and structural health monitoring of a wing-shaped sandwich panel using inverse finite element method. Sensors 2017, 17, 20. [Google Scholar] [CrossRef]
- Oboe, D.; Colombo, L.; Sbarufatti, C.; Giglio, M. Comparison of strain pre-extrapolation techniques for shape and strain sensing by iFEM of a composite plate subjected to compression buckling. Compos. Struct. 2021, 262, 17. [Google Scholar] [CrossRef]
- Oboe, D.; Colombo, L.; Sbarufatti, C.; Giglio, M. Shape sensing of a complex aeronautical structure with inverse finite element method. Sensors 2021, 21, 25. [Google Scholar] [CrossRef]
- Zhao, Y.; Du, J.L.; Bao, H.; Xu, Q. Optimal sensor placement based on eigenvalues analysis for sensing deformation of wing frame using iFEM. Sensors 2018, 18, 22. [Google Scholar] [CrossRef]
- Niu, S.T.; Guo, Y.H.; Bao, H. A triangular inverse element coupling mixed interpolation of tensorial components technique for shape sensing of plate structure. Measurement 2022, 202, 13. [Google Scholar] [CrossRef]
- Floris, I.; Adam, J.M.; Calderon, P.A.; Sales, S. Fiber optic shape sensors: A comprehensive review. Opt. Lasers Eng. 2021, 139, 17. [Google Scholar] [CrossRef]
- Liu, W.L.; Guo, Y.; Xiong, X.; Kuang, L.Y. Fiber Bragg grating based displacement sensors: State of the art and trends. Sens. Rev. 2019, 39, 87–98. [Google Scholar] [CrossRef]
- Ma, Z.; Chen, X.Y. Fiber bragg gratings sensors for aircraft wing shape measurement: Recent applications and technical analysis. Sensors 2019, 19, 25. [Google Scholar] [CrossRef]
- Nazeer, N.; Groves, R.M.; Benedictus, R. Assessment of the measurement performance of the multimodal fibre optic shape sensing configuration for a morphing wing section. Sensors 2022, 22, 16. [Google Scholar] [CrossRef]
- Mao, Z.; Todd, M. Comparison of shape reconstruction strategies in a complex flexible structure. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2008, San Diego, CA, USA, 9–13 March 2008. [Google Scholar]
- Yi, J.C.; Zhu, X.J.; Zhang, H.S.; Shen, L.Y.; Qiao, X.P. Spatial shape reconstruction using orthogonal fiber Bragg grating sensor array. Mechatronics 2012, 22, 679–687. [Google Scholar] [CrossRef]
- Chen, X.Y.; Yi, X.H.; Qian, J.W.; Zhang, Y.N.; Shen, L.Y.; Wei, Y. Updated shape sensing algorithm for space curves with FBG sensors. Opt. Lasers Eng. 2020, 129, 10. [Google Scholar] [CrossRef]
- Tan, X.; Guo, P.W.; Zou, X.X.; Bao, Y. Buckling detection and shape reconstruction using strain distributions measured from a distributed fiber optic sensor. Measurement 2022, 200, 13. [Google Scholar] [CrossRef]
- Li, P.; Liu, Y.J.; Leng, J.S. A new deformation monitoring method for a flexible variable camber wing based on fiber Bragg grating sensors. Mater. Syst. Struct. 2014, 25, 1644–1653. [Google Scholar] [CrossRef]
- Mohapatra, A.G.; Khanna, A.; Gupta, D. An experimental approach to evaluate machine learning models for the estimation of load distribution on suspension bridge using FBG sensors and IoT. Comput. Intell. 2022, 38, 747–769. [Google Scholar] [CrossRef]
- Wang, Q.A.; Zhang, C.; Ma, Z.G. Modelling and forecasting of SHM strain measurement for a large-scale suspension bridge during typhoon events using variational heteroscedastic Gaussian process. Eng. Struct. 2022, 251, 113554. [Google Scholar] [CrossRef]
- Baltiiski, P.; Iliev, I.; Kehaiov, B. Long-term spectrum monitoring with big data analysis and machine learning for cloud-based radio access networks. Wirel. Pers. Commun. 2016, 87, 815–835. [Google Scholar] [CrossRef]
- Wang, Q.A.; Wang, C.B.; Ma, Z.G. Bayesian dynamic linear model framework for structural health monitoring data forecasting and missing data imputation during typhoon events. Struct. Health Monit. 2022, 21, 2933–2950. [Google Scholar] [CrossRef]
- Usman, A.; Zulkifli, N.; Salim, M.R. Fault monitoring in passive optical network through the integration of machine learning and fiber sensors. Int. J. Commun. Syst. 2022, 35, e5134. [Google Scholar] [CrossRef]
- Wang, Q.A.; Zhang, C.; Ma, Z.G. Shm deformation monitoring for high-speed rail track slabs and bayesian change point detection for the measurements. Constr. Build. Mater. 2021, 300, 124337. [Google Scholar] [CrossRef]
- Wang, Q.A.; Ni, Y.Q. Measurement and forecasting of high-speed rail track slab deformation under uncertain SHM data using variational heteroscedastic gaussian process. Sensors 2019, 19, 3311. [Google Scholar] [CrossRef]
- Dhanalakshmi, S.; Nandini, P.; Rakshit, S. Fiber Bragg grating sensor-based temperature monitoring of solar photovoltaic panels using machine learning algorithms. Opt. Fiber Technol. 2022, 69, 102831. [Google Scholar] [CrossRef]
- Wang, C.H.; Wang, X.X. Deformation Prediction of Excavated Slopes with a Neural Network Model Based on Nonlinear Numerical Analyses. In Proceedings of the 4th GeoShanghai International Conference on Advances in Soil Dynamics and Foundation Engineering, Shanghai, China, 25–30 May 2018; pp. 511–519. [Google Scholar]
- Chen, H.Q.; Zeng, Z.G.; Tang, H.M. Study on Landslide Deformation Prediction Based on Recurrent Neural Network under the Function of Rainfall. In Proceedings of the 19th International Conference on Neural Information Processing (ICONIP), Lecture Notes in Computer Science (ICONIP), Berlin, Germany, 12 November 2012; pp. 683–690. [Google Scholar]
- Morooka, K.; Taguchi, T.; Chen, X.; Kurazume, R.; Hashizume, M.; Hasegawa, T. A method for constructing real-time FEM-based simulator of stomach behavior with large-scale deformation by neural networks. Spie-Int. Soc. Opt. Eng. 2012, 8316, 18. [Google Scholar]
- Sefati, S.; Gao, C.; Iordachita, I.; Taylor, R.H.; Armand, M. Data-driven shape sensing of a surgical continuum manipulator using an uncalibrated fiber bragg grating sensor. IEEE Sens. 2021, 21, 3066–3076. [Google Scholar] [CrossRef]
- Zheng, H.R.; Jiang, Y.; Angelmahr, M.; Flachenecker, G.; Cai, H.W.; Schade, W. Artificial neural network for the reduction of birefringence-induced errors in fiber shape sensors based on cladding waveguides gratings. Opt. Lett. 2020, 45, 1726–1729. [Google Scholar] [CrossRef]
- Manavi, S.; Renna, T.; Horvath, A.; Freund, S.; Zam, A.; Rauter, G.; Schade, W.; Cattin, P.C. Using Supervised Deep-Learning to Model Edge-FBG Shape Sensors: A Feasibility Study. In Proceedings of the Optical Sensors Conference, Nanjing, China, 18 April 2021. [Google Scholar]
- Baldwin, C.S.; Salter, T.J.; Kiddy, J.S. Static shape measurements using a multiplexed fiber Bragg grating sensor system in Smart Structures and Materials 2004 Conference. In Proceedings of the Society of Photo-Optical Instrumentation Engineers Spie-Int Soc Optical Engineering, San Diego, CA, USA, 27 July 2004; Volume 5384, pp. 206–217. [Google Scholar]
- Wu, X.Y.; Xu, Z.W.; Zeng, J. Reconstruction of wing structure deformation based on particle swarm optimization ridge regression. Aerosp. Eng. 2022, 16, 2022. [Google Scholar] [CrossRef]
- Wu, H.F.; Dong, R.; Liu, Z.; Wang, H.; Liang, L. Deformation monitoring and shape reconstruction of flexible planer structures based on FBG. Micromachines 2022, 13, 18. [Google Scholar] [CrossRef]
- Geng, X.Y.; Lu, S.Z.; Jiang, M.S.; Sui, Q.M.; Xiao, H.; Jia, Y.X.; Jia, L. Research on FBG-Based CFRP structural damage identification using BP neural network. Photonic Sens. 2018, 8, 168–175. [Google Scholar] [CrossRef]
- Wu, H.F.; Liang, L.; Wang, H.; Dai, S.; Xu, Q.W.; Dong, R. Design and measurement of a dual FBG high-precision shape sensor for wing shape reconstruction. Sensors 2022, 22, 168. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fx (mm) | Fy (mm) | Force (N) | Tx (mm) | Ty (mm) | Torque (N × mm) | |
|---|---|---|---|---|---|---|
| Load 1 | 0 | 100 | 300 | 1 | 0 | 50,000 |
| Load 2 | 66.9 | 44.6 | −275.964 | 1.486 | 2.229 | 10,000 |
| Load 3 | 67.11 | 44.74 | 40.58549 | 1.503333 | 2.255 | 225.5 |
| Load 4 | 279.48 | 186.32 | 425.8678 | 6.210667 | 9.316 | 931.6 |
| Load 5 | 0 | 100 | 300 | 0 | 0 | 0 |
| Load 6 | 0 | 0 | 0 | 0 | 0 | 40,000 |
| Angle Combination 1 | Angle Combination 2 | Angle Combination 3 | Angle Combination 4 | Angle Combination 5 | Angle Combination 6 | Angle Combination 7 | Angle Combination 8 | Angle Combination 9 | Angle Combination 10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 10 | 20 | 30 | 40 | 15 | 30 | 45 | 60 | 80 | |
| 90 | −80 | −70 | −60 | −50 | −15 | −30 | −45 | −60 | −80 |
| x (mm) | y (mm) | Numerical Value (N) | |
|---|---|---|---|
| Force | 104 | 156 | −1500.7 (N) |
| Torque | 0 | 0 | −728.77 (N mm) |
| Measuring Point 2 | Measuring Point 5 | Measuring Point 9 | Measuring Point 16 | ||
|---|---|---|---|---|---|
| x (m) | Theoretical value | 5.43 × 10−6 | 5.50 × 10−6 | 5.50 × 10−6 | 5.19 × 10−6 |
| Predicted value | 3.52 × 10−6 | 3.49 × 10−6 | 3.42 × 10−6 | 3.41 × 10−6 | |
| Percentage of error (%) | 35.2 | 36.5 | 37.8 | 34.3 | |
| y (m) | Theoretical value | 6.72 × 10−8 | 1.41 × 10−7 | 3.16 × 10−7 | 6.47 × 10−7 |
| Predicted value | 3.81 × 10−8 | 2.01 × 10−7 | 2.20 × 10−7 | 6.71 × 10−7 | |
| Percentage of error (%) | 43.3 | 42.6 | 30.3 | 3.7 | |
| z (m) | Theoretical value | 0.1195 | 0.0946 | 0.0699 | 0.0442 |
| Predicted value | 0.1123 | 0.0861 | 0.0638 | 0.0388 | |
| Percentage of error (%) | 6.03 | 8.98 | 9.29 | 12.22 |
| Measuring Point | State | Axis | Reconstruction Value (cm) | Measured Value (cm) | Error (%) |
|---|---|---|---|---|---|
| measuring point 1 | State I | x-axis | 26.939 | 26.999 | 0.22 |
| z-axis | −1.83 | −1.65 | 10.9 | ||
| State II | x-axis | 26.759 | 26.998 | 0.88 | |
| z-axis | −3.76 | −3.48 | 8.05 | ||
| State III | x-axis | 26.455 | 26.99 | 1.98 | |
| z-axis | −5.7 | −5.37 | 6.15 | ||
| measuring point 5 | State I | x-axis | 21.951 | 21.999 | 0.21 |
| z-axis | −1.471 | −1.729 | 14.92 | ||
| State II | x-axis | 21.804 | 21.999 | 0.89 | |
| z-axis | −2.93 | −2.678 | 9.41 | ||
| State III | x-axis | 21.556 | 21.998 | 2.01 | |
| z-axis | −4.392 | −4.107 | 6.94 |
| Measuring Point | State | Axis | Reconstruction Value (cm) | Measured Value (cm) | Error (%) |
|---|---|---|---|---|---|
| measuring point 1 | State IV | x-axis | 26.895 | 26.789 | 0.4 |
| y-axis | 0.502 | 0.712 | 29.49 | ||
| z-axis | 1.269 | 1.477 | 14.08 | ||
| State V | x-axis | 26.745 | 26.465 | 1.06 | |
| y-axis | 0.852 | 0.974 | 12.53 | ||
| z-axis | 2.661 | 2.897 | 8.15 | ||
| State VI | x-axis | 26.595 | 26.228 | 1.4 | |
| y-axis | 0.952 | 1.014 | 6.11 | ||
| z-axis | 3.997 | 4.059 | 1.5 | ||
| measuring point 5 | State IV | x-axis | 21.937 | 21.737 | 0.92 |
| y-axis | 19.799 | 19.574 | 1.15 | ||
| z-axis | −0.936 | −1.108 | 15.52 | ||
| State V | x-axis | 21.736 | 21.423 | 1.46 | |
| y-axis | 19.599 | 19.418 | 0.93 | ||
| z-axis | −1.524 | −1.769 | 13.85 | ||
| State VI | x-axis | 21.586 | 21.286 | 1.41 | |
| y-axis | 19.198 | 18.898 | 1.59 | ||
| z-axis | −2.45 | −2.67 | 8.24 |
| X (%) | Y (%) | Z (%) | ||||
|---|---|---|---|---|---|---|
| Max | Min | Max | Min | Max | Min | |
| Error after method improvement | 2.01 | 0.22 | 29.49 | 1.15 | 15.52 | 1.50 |
| Error prior method improvement | 2.33 | 0.8 | 35.59 | 9.46 | 16.21 | 1.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, H.; Dong, R.; Xu, Q.; Liu, Z.; Liang, L. FOSS-Based Method for Thin-Walled Structure Deformation Perception and Shape Reconstruction. Micromachines 2023, 14, 794. https://doi.org/10.3390/mi14040794
Wu H, Dong R, Xu Q, Liu Z, Liang L. FOSS-Based Method for Thin-Walled Structure Deformation Perception and Shape Reconstruction. Micromachines. 2023; 14(4):794. https://doi.org/10.3390/mi14040794
Chicago/Turabian StyleWu, Huifeng, Rui Dong, Qiwei Xu, Zheng Liu, and Lei Liang. 2023. "FOSS-Based Method for Thin-Walled Structure Deformation Perception and Shape Reconstruction" Micromachines 14, no. 4: 794. https://doi.org/10.3390/mi14040794
APA StyleWu, H., Dong, R., Xu, Q., Liu, Z., & Liang, L. (2023). FOSS-Based Method for Thin-Walled Structure Deformation Perception and Shape Reconstruction. Micromachines, 14(4), 794. https://doi.org/10.3390/mi14040794