
On the Investigation of Frequency Characteristics of a Novel Inductive Debris Sensor

 ,
,  , ,
, ,
Abstract
1. Introduction
2. The inductive Debris Sensor
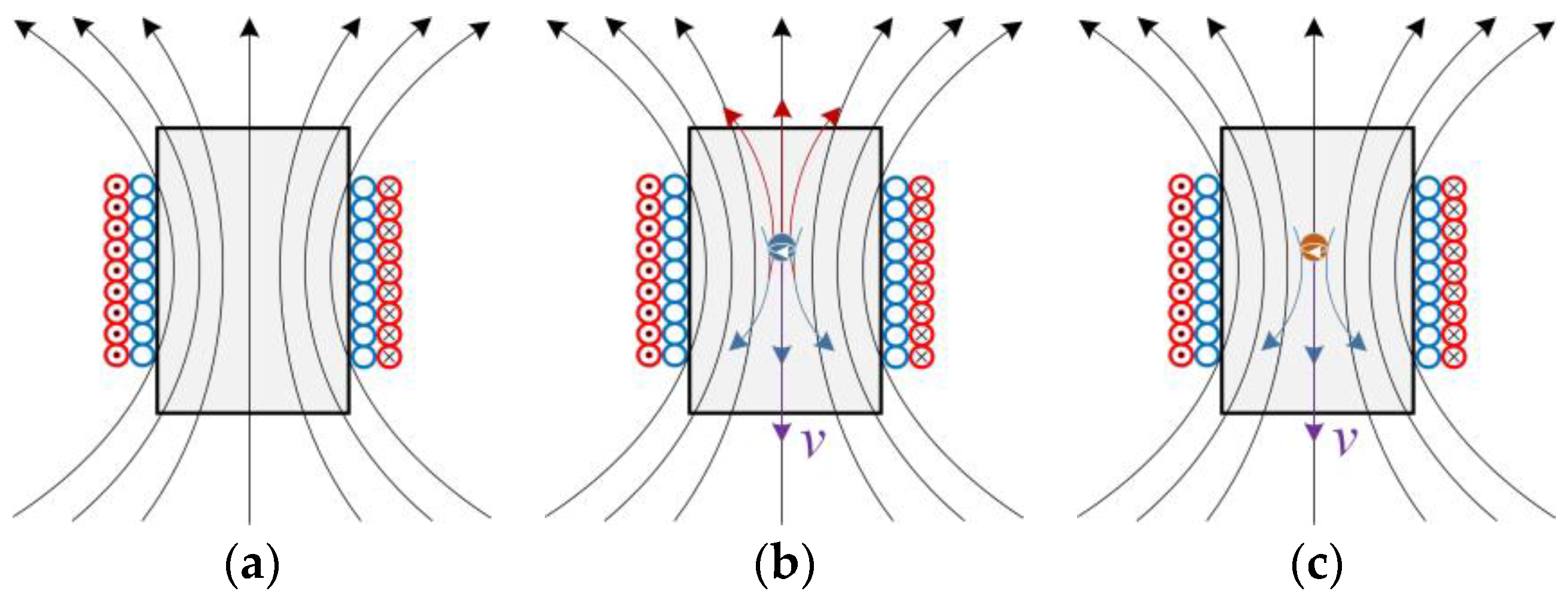
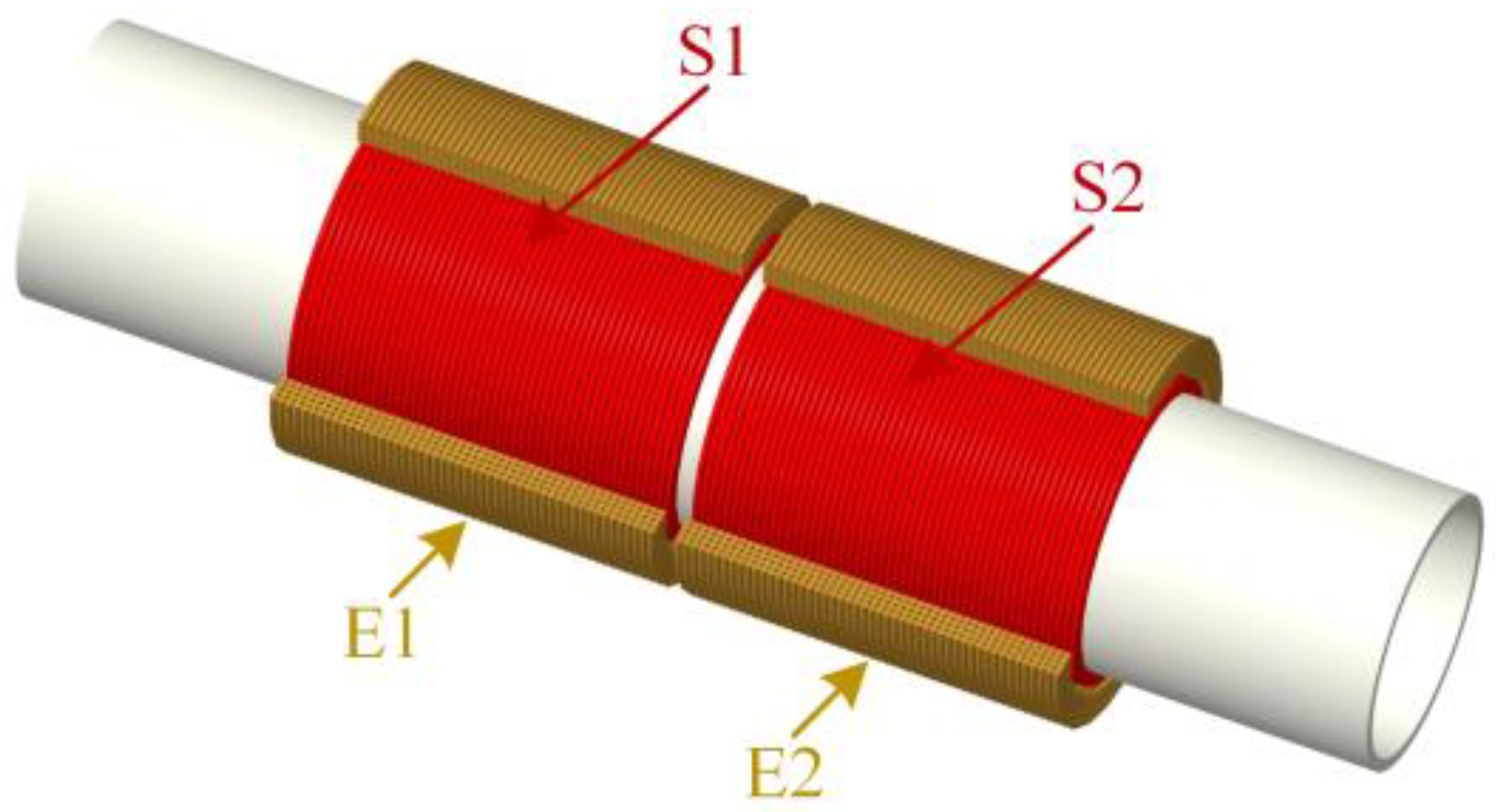
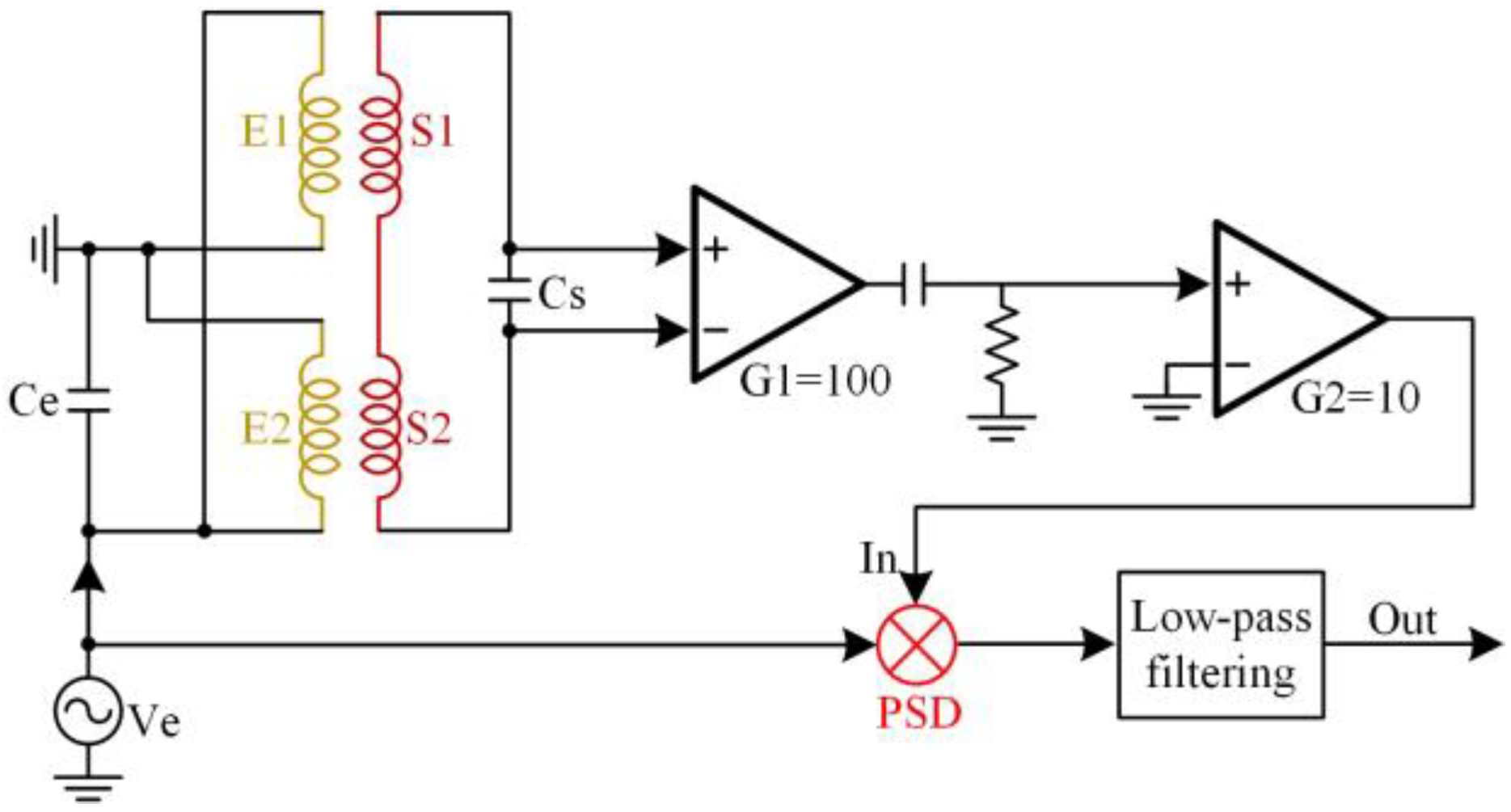
2.1. Working Principle of the Proposed Inductive Sensor
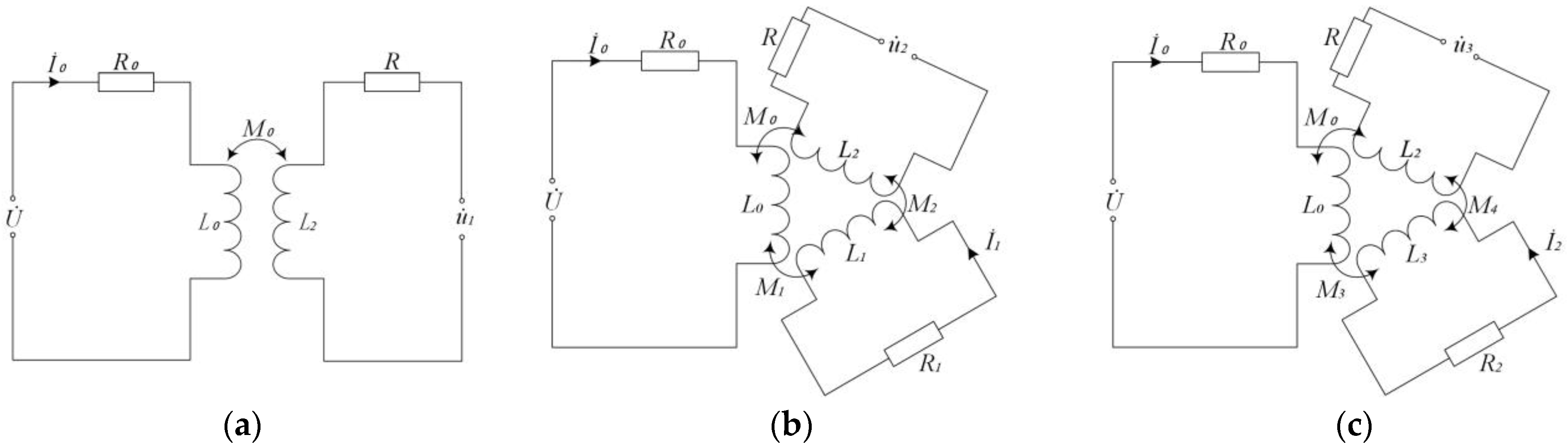
2.2. Sensor Model Simplification
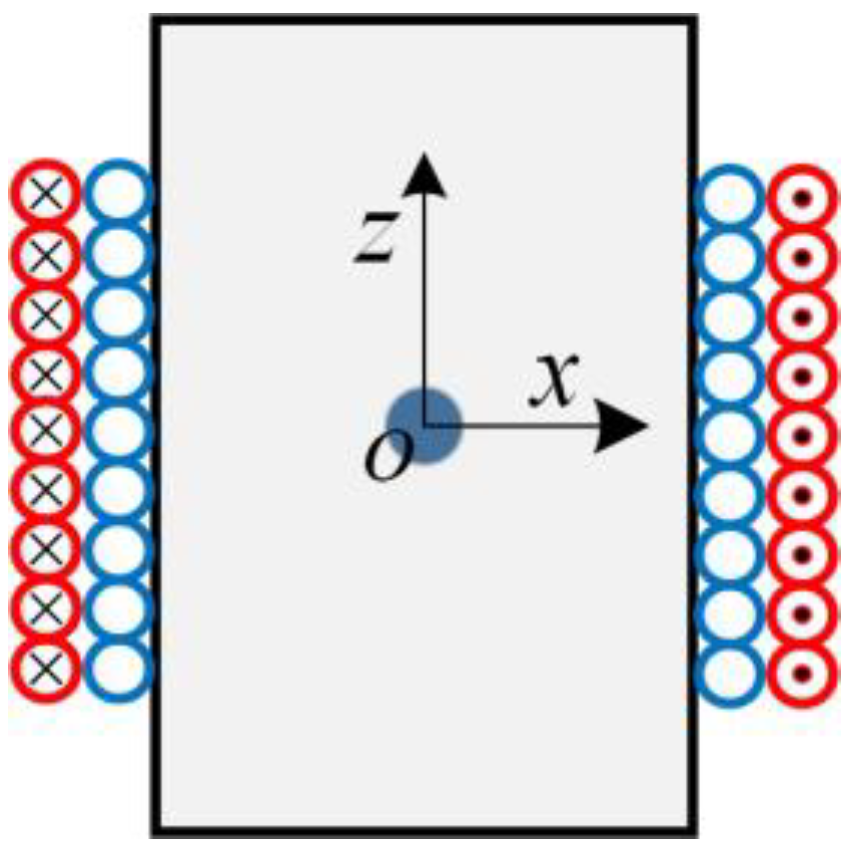
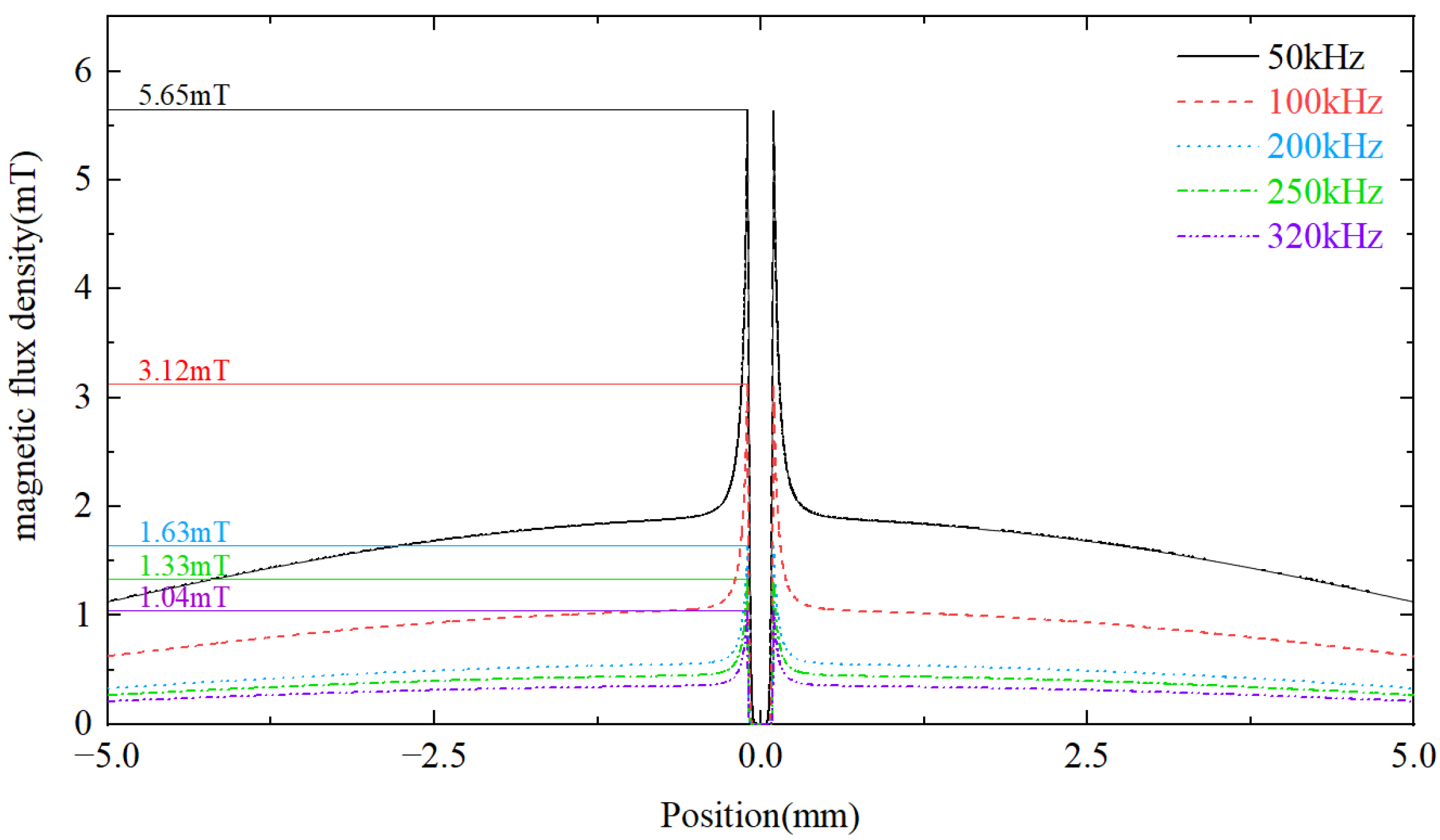
3. Simulation Analysis of the Sensor Magnetic Field
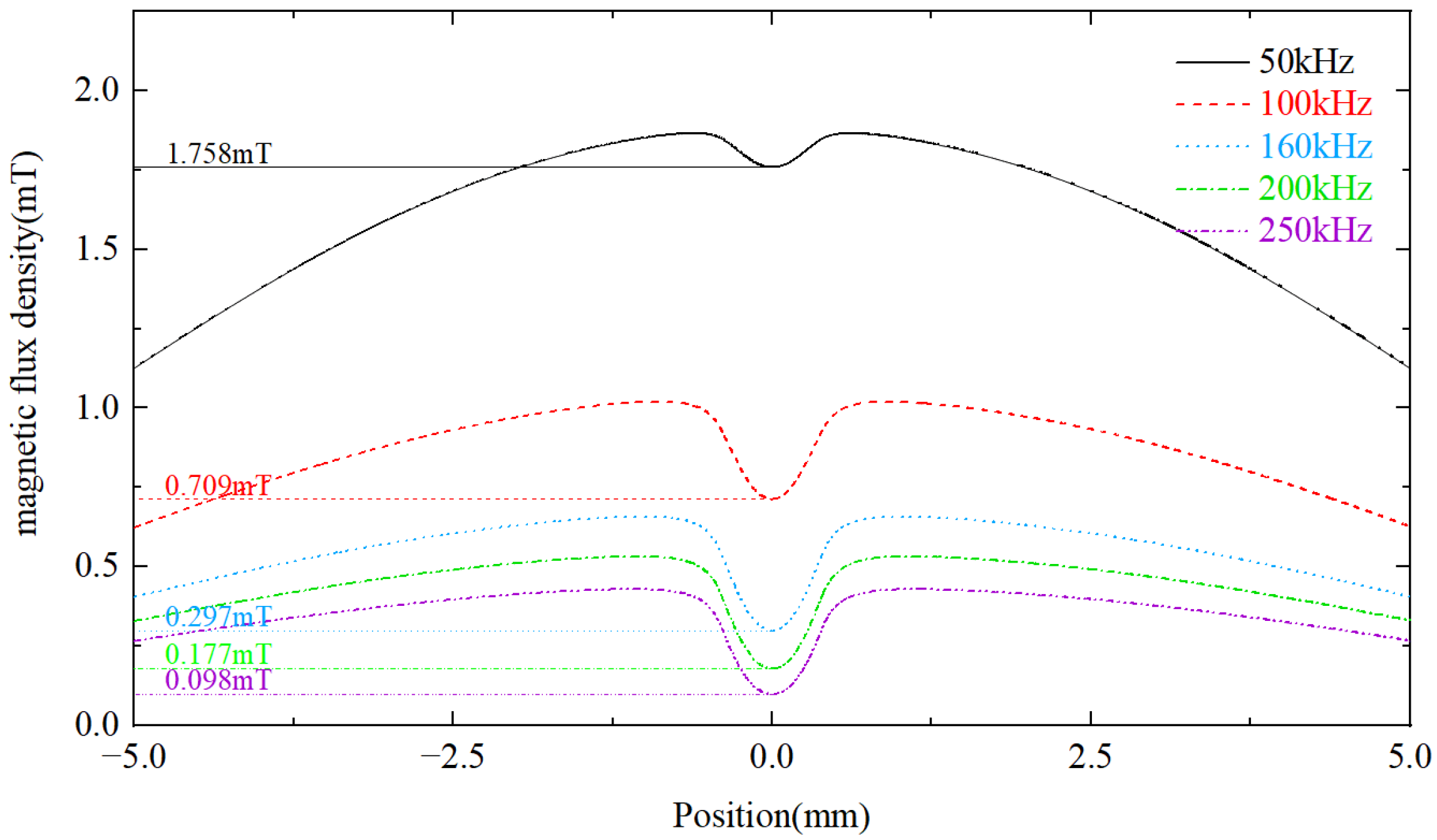
3.1. The Influence of Ferrous Metal Debris on the Magnetic Flux Density
3.2. The Influence of Non-Ferrous Metal Debris on Magnetic Flux Density
4. Experimental Results and Discussion
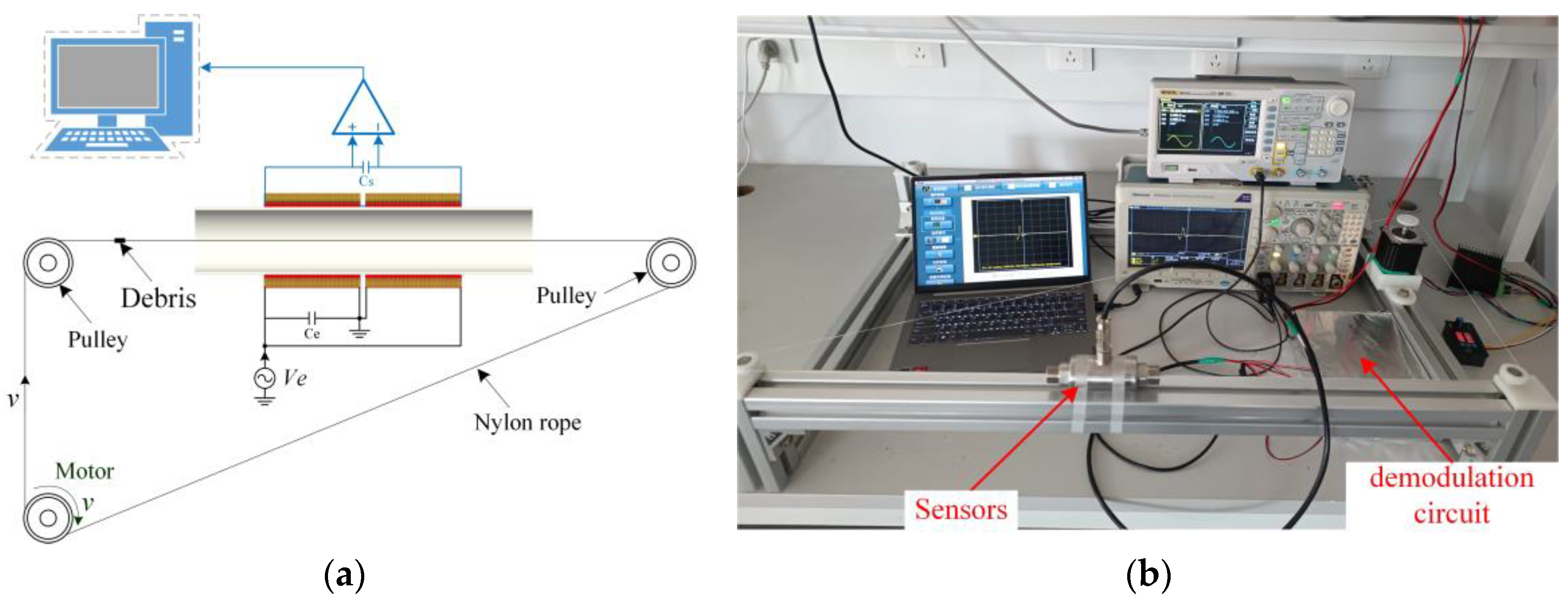
4.1. Experimental Setup
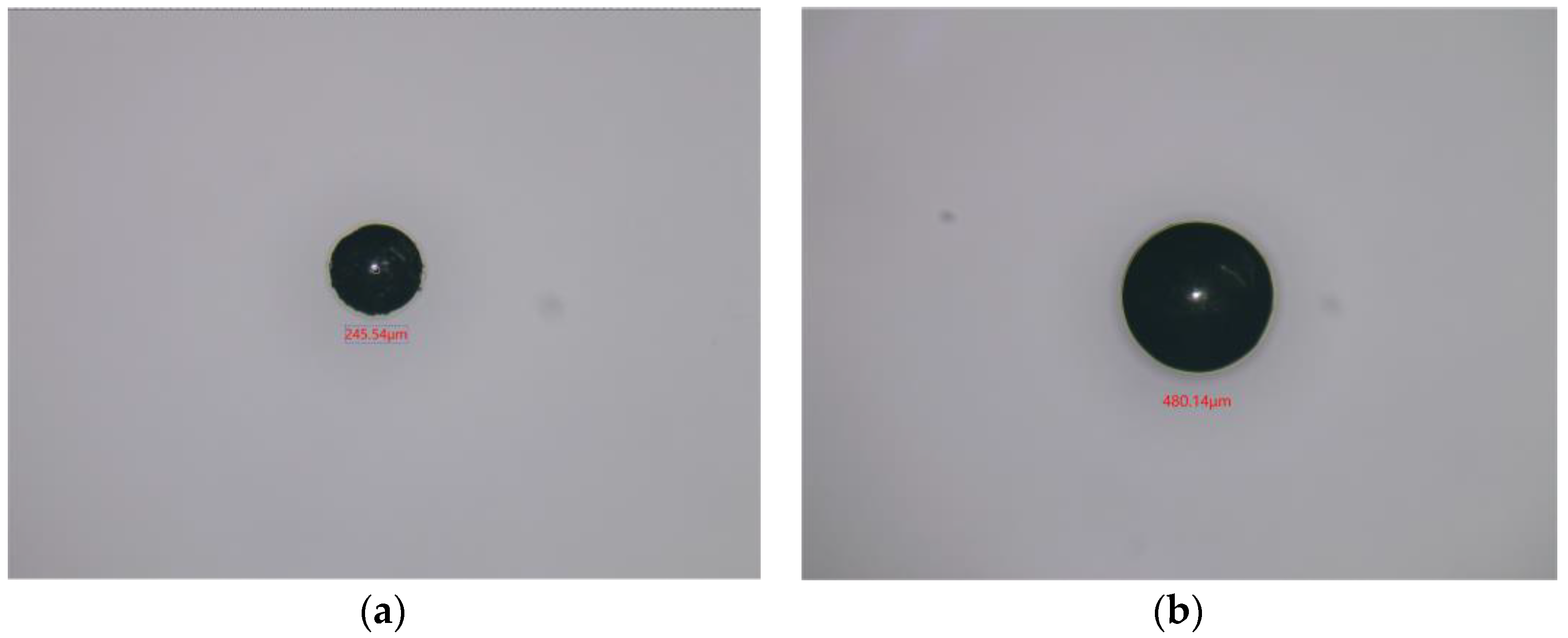
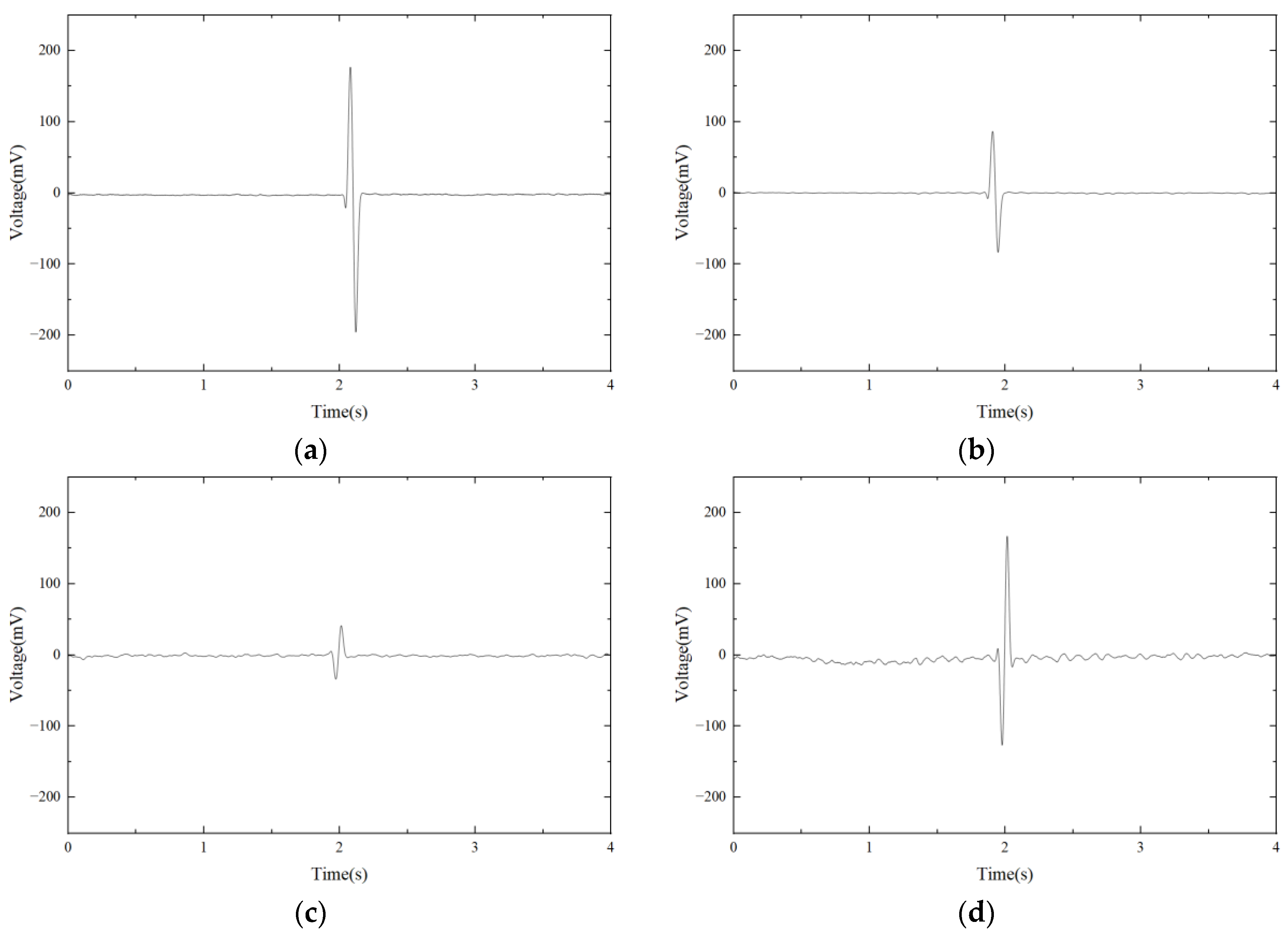
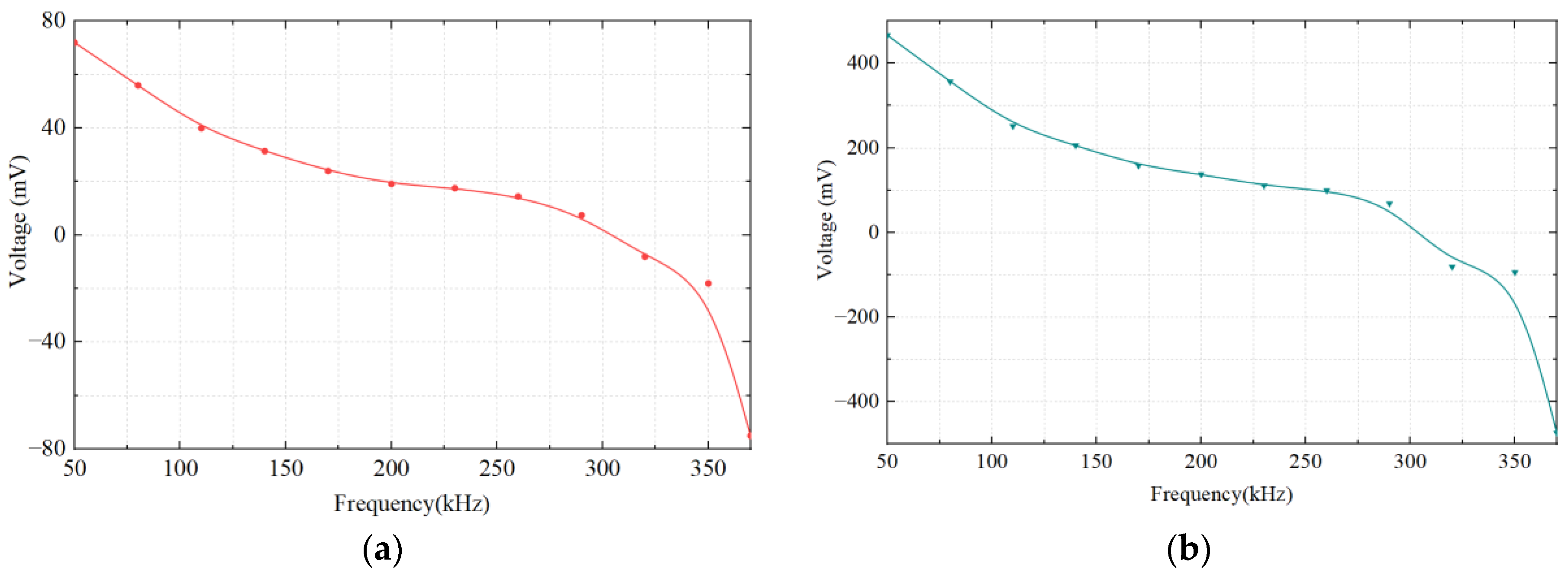
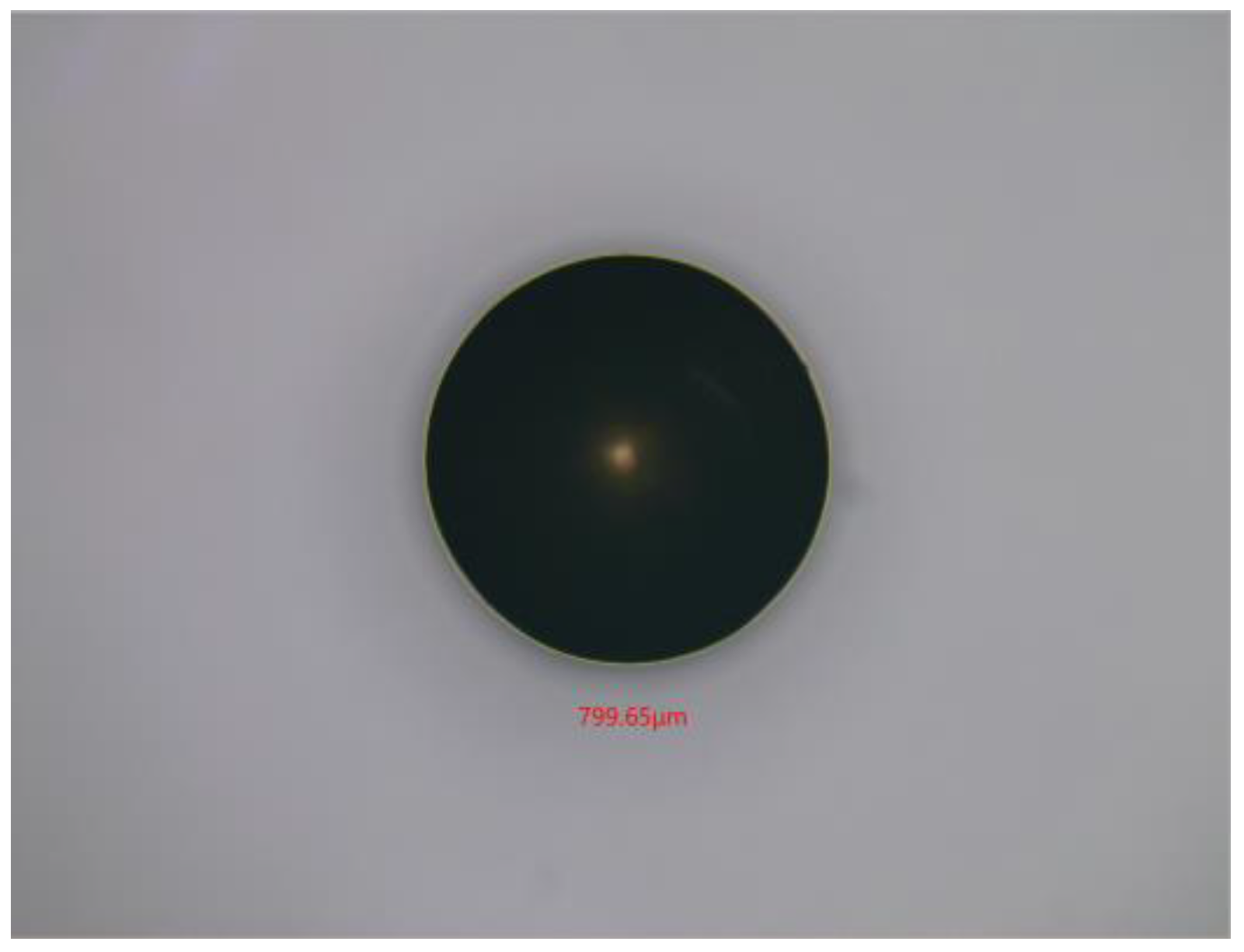
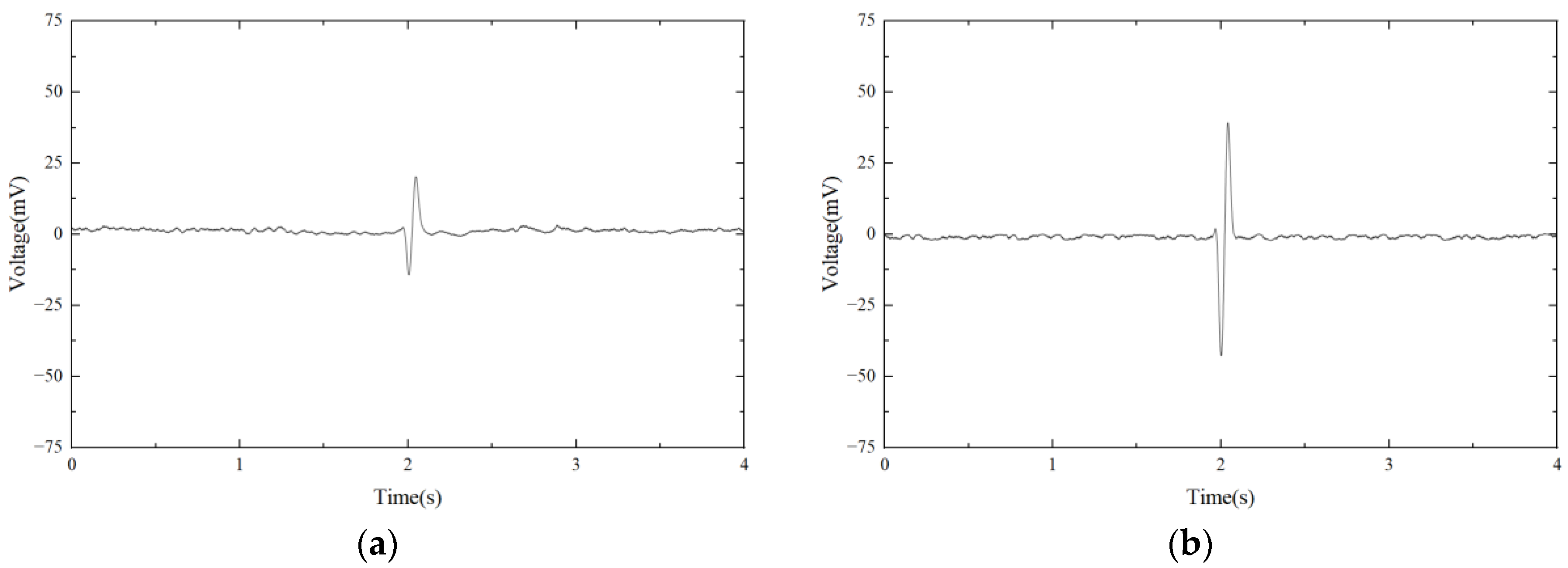
4.2. Experimental Results of Ferrous Metal Particles
4.3. Experimental Results of Non-Ferrous Metal Particles
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, T.; Wang, L.; Gu, Y.; Zuo, Y. Review on online inductive wear debris monitoring technology. J. Eng. 2019, 2019, 8518–8521. [Google Scholar] [CrossRef]
- Hong, W.; Cai, W.; Wang, S.; Tomovic, M.M. Mechanical wear debris feature, detection, and diagnosis: A review. Chin. J. Aeronaut. 2018, 31, 867–882. [Google Scholar] [CrossRef]
- Zhu, X.; Zhong, C.; Zhe, J. Lubricating oil conditioning sensors for online machine health monitoring—A review. Tribol. Int. 2017, 109, 473–484. [Google Scholar] [CrossRef]
- Kotzalas, M.N.; Doll, G.L. Tribological advancements for reliable wind turbine performance. Philos. Trans. 2010, 368, 4829–4850. [Google Scholar] [CrossRef]
- Wang, J.; Bi, J.; Wang, L.; Wang, X. A non-reference evaluation method for edge detection of wear particles in ferrograph images. Mech. Syst. Signal Process. 2018, 100, 863–876. [Google Scholar] [CrossRef]
- Khandaker, I.I.; Glavas, E.; Jones, G.R. A fibre-optic oil condition monitor based on chromatic modulation. Meas. Sci. Technol. 1993, 4, 608. [Google Scholar] [CrossRef]
- Appleby, M.; Choy, F.K.; Du, L.; Zhe, J. Oil debris and viscosity monitoring using ultrasonic and capacitance/inductance measurements. Lubr. Sci. 2013, 25, 507–524. [Google Scholar] [CrossRef]
- Kayani, S. Using combined XRD-XRF analysis to identify meteorite ablation debris. In Proceedings of the 2009 International Conference on Emerging Technologies, Islamabad, Pakistan, 19–20 October 2009; pp. 219–220. [Google Scholar]
- Wang, Y.; Han, Z.; Gao, T.; Qing, X. In-situ capacitive sensor for monitoring debris of lubricant oil. Ind. Lubr. Tribol. 2018, 70, 1310–1319. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, T.; Wu, D.; Zhu, L.; Qing, X.; Xue, W. A New In Situ Coaxial Capacitive Sensor Network for Debris Monitoring of Lubricating Oil. Sensors 2022, 22, 1777. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, H.; Zeng, L.; Chen, H.; Sun, Y. Determination of metal particles in oil using a microfluidic chip-based inductive sensor. Instrum. Sci. Technol. 2016, 44, 259–269. [Google Scholar] [CrossRef]
- Shi, H.; Huo, D.; Zhang, H.; Li, W.; Sun, Y.; Li, G.; Chen, H. An Impedance Sensor for Distinguishing Multi-Contaminants in Hydraulic Oil of Offshore Machinery. Micromachines 2021, 12, 1407. [Google Scholar] [CrossRef]
- Jie, Z.; Drinkwater, B.W.; Dwyer-Joyce, R.S. Monitoring of Lubricant Film Failure in a Ball Bearing Using Ultrasound. J. Tribol. 2006, 128, 612–618. [Google Scholar]
- Du, L.; Zhe, J.; Carletta, J.; Veillette, R.; Choy, F. Real-time monitoring of wear debris in lubrication oil using a microfluidic inductive Coulter counting device. Microfluid. Nanofluidics 2010, 9, 1241–1245. [Google Scholar] [CrossRef]
- Wu, S.; Liu, Z.; Yuan, H.; Yu, K.; Gao, Y.; Liu, L.; Pan, X. Multichannel Inductive Sensor Based on Phase Division Multiplexing for Wear Debris Detection. Micromachines 2019, 10, 246. [Google Scholar] [CrossRef]
- Du, L.; Zhu, X.; Han, Y.; Zhao, L.; Zhe, J. Improving sensitivity of an inductive pulse sensor for detection of metallic wear debris in lubricants using parallel LC resonance method. Meas. Sci. Technol. 2013, 24, 75106. [Google Scholar] [CrossRef]
- Hong, W.; Wang, S.; Tomovic, M.M.; Liu, H.; Wang, X. A new debris sensor based on dual excitation sources for online debris monitoring. Meas. Sci. Technol. 2015, 26, 095101. [Google Scholar] [CrossRef]
- Wu, T.; Peng, Y.; Wu, H.; Zhang, X.; Wang, J. Full-life dynamic identification of wear state based on on-line wear debris image features. Mech. Syst. Signal Process. 2014, 42, 404–414. [Google Scholar] [CrossRef]
- Zhu, X.; Du, L.; Zhe, J. A 3 × 3 wear debris sensor array for real time lubricant oil conditioning monitoring using synchronized sampling. Mech. Syst. Signal Process. 2017, 83, 296–304. [Google Scholar] [CrossRef]
- Xiao, H.; Wang, X.; Li, H.; Luo, J.; Feng, S. An Inductive Debris Sensor for a Large-Diameter Lubricating Oil Circuit Based on a High-Gradient Magnetic Field. Appl. Sci. 2019, 9, 1546. [Google Scholar] [CrossRef]
- Du, L.; Zhe, J. A high throughput inductive pulse sensor for online oil debris monitoring. Tribol. Int. 2011, 44, 175–179. [Google Scholar] [CrossRef]
- Flanagan, I.M.; Jordan, J.R.; Whittington, H.W. An inductive method for estimating the composition and size of metal particles. Meas. Sci. Technol. 1999, 1, 381–384. [Google Scholar] [CrossRef]
- Talebi, A.; Hosseini, S.V.; Parvaz, H.; Heidari, M. Design and fabrication of an online inductive sensor for identification of ferrous wear particles in engine oil. Ind. Lubr. Tribol. 2021, 73, 666–675. [Google Scholar] [CrossRef]
- Qian, M.; Ren, Y.; Zhao, G.; Feng, Z. Ultrasensitive Inductive Debris Sensor With a Two-Stage Autoasymmetrical Compensation Circuit. IEEE Trans. Ind. Electron. 2021, 68, 8885–8893. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, F.; Li, D.; Yang, J. Research on the Influence of Excitation Frequency on the Sensitivity in Metal Debris Detection with Inductor Sensor. Adv. Mech. Eng. 2014, 2014, 1–9. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, Y.; Li, N.; Qian, Z.; Liu, D.; Qian, Z.; Zhang, C. A New Inductive Debris Sensor Based on Dual-Excitation Coils and Dual-Sensing Coils for Online Debris Monitoring. Sensors 2021, 21, 7556. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coil Parameters | Value | Unit |
|---|---|---|
| Internal diameter of induction coil | 10 | mm |
| External diameter of induction coil | 10.8 | mm |
| Wire diameter of induction coil | 0.1 | mm |
| Number of turns of induction coil | 400 | / |
| Internal diameter of excitation coil | 10.8 | mm |
| External diameter of excitation coil | 13.2 | mm |
| Wire diameter of excitation coil | 0.2 | mm |
| Number of turns of excitation coil | 300 | / |
| Coil width | 10 | mm |
| Excitation signal amplitude | V |
| Metal Debris Properties | Materials | Relative Permeability |
|---|---|---|
| ferrous metal debris | Iron | 4000 |
| non-ferrous metal debris | Copper | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Liu, H.; Qian, Z.; Qian, Z.; Liu, D.; Li, K.; Wang, G. On the Investigation of Frequency Characteristics of a Novel Inductive Debris Sensor. Micromachines 2023, 14, 669. https://doi.org/10.3390/mi14030669
Wu X, Liu H, Qian Z, Qian Z, Liu D, Li K, Wang G. On the Investigation of Frequency Characteristics of a Novel Inductive Debris Sensor. Micromachines. 2023; 14(3):669. https://doi.org/10.3390/mi14030669
Chicago/Turabian StyleWu, Xianwei, Hairui Liu, Zhi Qian, Zhenghua Qian, Dianzi Liu, Kun Li, and Guoshuai Wang. 2023. "On the Investigation of Frequency Characteristics of a Novel Inductive Debris Sensor" Micromachines 14, no. 3: 669. https://doi.org/10.3390/mi14030669
APA StyleWu, X., Liu, H., Qian, Z., Qian, Z., Liu, D., Li, K., & Wang, G. (2023). On the Investigation of Frequency Characteristics of a Novel Inductive Debris Sensor. Micromachines, 14(3), 669. https://doi.org/10.3390/mi14030669