1. Introduction
Transducers have important applications in underwater acoustic detection, ultrasound nondestructive testing, and sensing fields. The main transduction materials in these transducers are piezoelectric materials. Currently, piezoelectric materials capable of longitudinal stretching mode (
mode), such as 1–3 type piezoelectric composite, have been widely used in high-frequency transducers for their characteristics of simple preparation technology, strong piezoelectricity, and large electromechanical coupling factor [
1,
2]. Piezoelectric materials capable of the thickness expansion mode (kt mode) or radial expansion mode (
mode) have been widely used in low-frequency transducers, such as tonpilz transducers and flextensional transducers [
3,
4].
Other than
,
, and kt, shear vibration mode is another kind of basic vibration mode. Some specific ceramics and single crystals have relatively high shear piezoelectric constants and shear electromechanical coupling factors. For some kinds of piezoelectric ceramics, such as the PZT-5A and PZT-5H types,
is significantly higher than
, while
and
are equivalent. In one study, the
of xPb(In
1/2Nb
1/2)O
3-yPb(Mg
1/3Nb
2/3)O
3-zPbTiO
3 (PIMNT) single crystal with [110] orientation reached 96.4%, and the
mode was 5966 pC/N when platinum electrodes were used [
5]. Therefore, the reasonable selection of piezoelectric materials and application of
mode have the potential to improve the performance of piezoelectric transducers.
At present, there are few studies on the
mode of piezoelectric materials, which is mainly applied in energy harvesting, actuators, and new structural composites. For instance, Dong et al. designed a piezoelectric energy harvester with an L-shaped base that uses the
mode. Through the collaborative effects of a mass block, piezoelectric plate, and base, this piezoelectric energy harvester transforms acceleration into a shear force through the mass block upon excitation, and this shear force acts on the piezoelectric plate. This structure has relatively high output power [
6]. Zheng et al. studied a PZT piezoelectric bimorph cantilever beam device based on the serial-parallel structure of the
mode, which further increased the output power [
7]. Gao et al. proposed a multilayer cylindrical piezoelectric actuator working in shear mode, which consists of piezoelectric ceramic rings polarized in parallel along the axial direction with alternating positive and negative poles. Compared with the actuators working in other modes, the maximum driving force is increased by seven times [
8]. Miao et al. proposed a face-shear
PZT wafer to excite and receive a pure SH0 wave in plate structures. This wafer can also serve as a selective SH wave sensor, which can exclude lamb waves from 120 to 230 kHz [
9]. Kranz et al. proposed a new piezoelectric
shearing macroscopic fiber composite (MFC) with longitudinal polarization. Under electric field excitation conditions, the shearing MFC presented better electromechanical coupling efficiency [
10].
To sum up, the shear mode of piezoelectric ceramics has been applied in various fields, due to the unique advantages of tangential deformation, higher piezoelectricity, and electromechanical coupling factors. It can be seen that shear vibration mode has great research value and broad application prospects. However, since shear vibrations cannot radiate in water, the shear vibration mode has not been applied in underwater transducers.
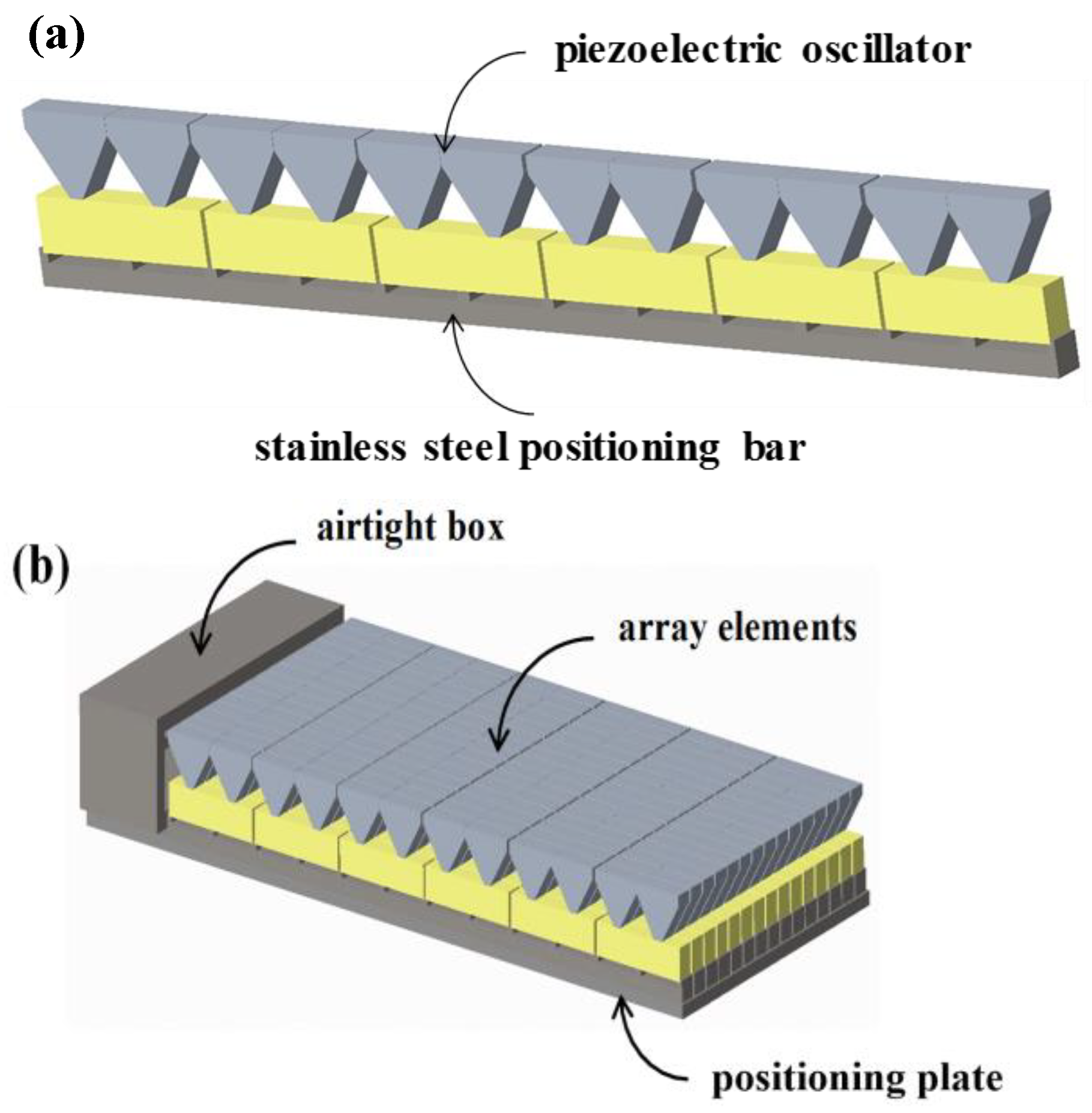
With respect to the disadvantage of the shear vibration mode’s inapplicability to acoustic emission in water, a trapezoid transition layer has been proposed to transform shear vibrations of piezoelectric materials into thickness vibrations of the transition layer, thus realizing acoustic emission [
11]. Based on the above research results, in order to explore the application prospect of shear vibration of piezoelectric materials in the field of underwater acoustic transducers, this paper proposes to use the shear vibration mode of piezoelectric ceramics to prepare underwater acoustic transducers. By introducing the trapezoidal transition layer structure in the maximum strain region of the piezoelectric ceramic shear vibration, the shear vibration of the piezoelectric ceramic is transformed into the surface vibration of the transition layer, so as to realize the effect of sound wave propagation to water. This study optimized the structure of an underwater transducer, based on the shear mode, by replacing the back transition layer with a positioning bar. Furthermore, a series of simulation models on a single element, four bonding elements, and the whole structure were conducted to identify how these boundary conditions affect the shear vibration. Finally, the ability of the trapezoid transition layer to transform shear vibrations into longitudinal vibrations was evaluated. This study provides a new design idea for piezoelectric transducers based on shear vibration mode.
3. Finite Element Simulation Analysis
A series of finite element simulations were carried out using finite element analysis software ANSYS (ANSYS, Inc., Canonsburg, PA, USA). FEA (finite element analysis) is an efficient numerical calculation method based on variational principle and subdivision interpolation, combined with mathematical and physical approximation to calculate and simulate real physical systems [
12]. In order to study how the boundary conditions of the piezoelectric ceramic blocks affected the shear vibration, the finite element simulations included a single element, four elements, and four elements with a trapezoid transition layer. Since the proposed transducer is formed via the repeated arrangement and combination of multiple piezoelectric oscillators, it only has to apply a symmetric boundary condition to a single piezoelectric oscillator. As discussed in previous work, the highest electromechanical coupling factor for PZT-5A piezoelectric ceramic working at the
mode was achieved when the size ratio along the electric field direction and polarization direction approached 1:1.2 [
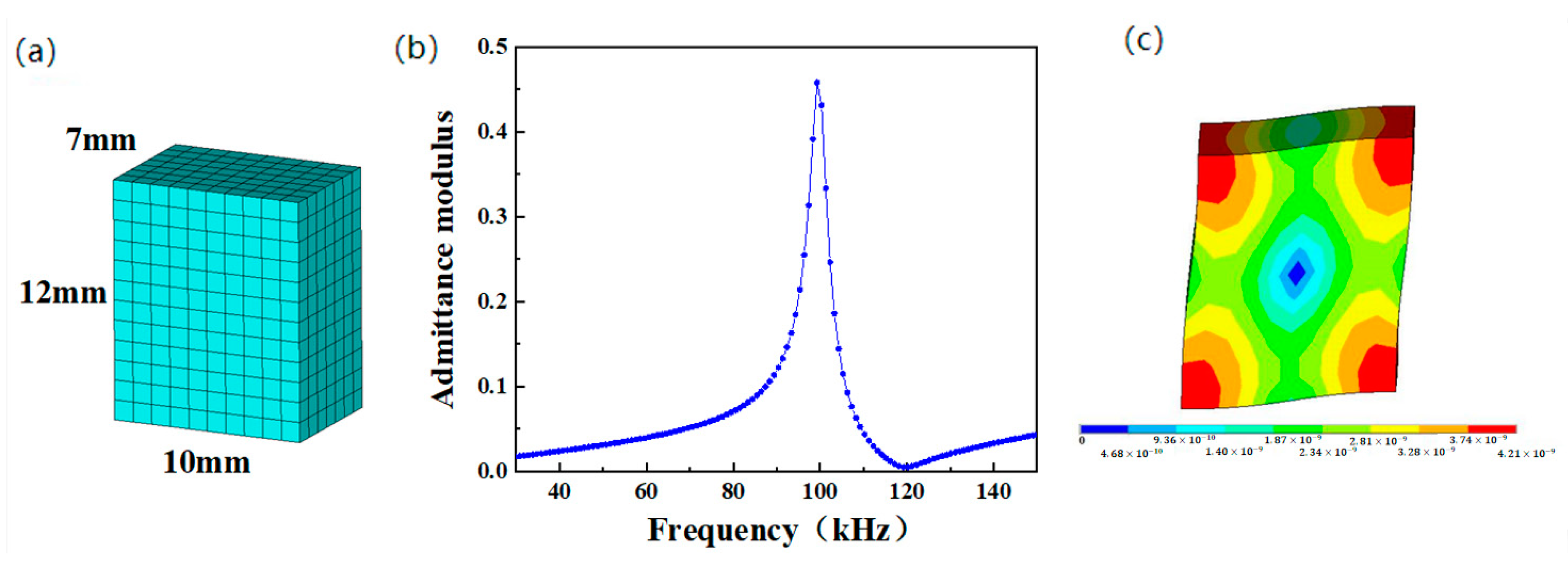
13]. In this study, a PZT-5A piezoelectric ceramic plate, which was 10 mm long (polarization direction), 12 mm wide (electric field direction), and 7 mm thick, was chosen as the active element. To consider both the operation time and accuracy, the model was meshed according to 1/10 of the wavelength. The frequency range was chosen as 30–150 kHz, and the constant damping ratio was set to 0.02. The material parameters of the piezoelectric oscillator are shown in
Table 1. The size parameters of the piezoelectric oscillator are shown in
Table 2.
3.1. Finite Element Analysis of a Single Element
The meshed model of a single element is shown in
Figure 3a. The harmonic response was analyzed, and the quantity of electric charge on the ceramic electrode surface was obtained from the post-processing module of ANSYS. On this basis, the admittance modulus curve of the single element was calculated and is shown in
Figure 3b. It was calculated from the conductance curve that the resonance frequency, anti-resonance frequency, and electromechanical coupling factor were 99.34 kHz, 119.21 kHz, and 0.59, respectively. It was a pure harmonic peak with no interferences from other modes. The vibration mode of the piezoelectric ceramic is shown in
Figure 3c. The different colors in
Figure 3c reflect the quantity of vibration displacement, where the quantity of vibration displacement increases from blue to red. Since the electric field was perpendicular to the polarization direction, the shear vibration mode of the ceramics was excited. The maximum strain of this vibration was mainly concentrated at the four vertexes of the ceramics, whereas the nodal point was in the center of the ceramics. These are the characteristics of shear vibration.
3.2. Finite Element Analysis of Four Elements
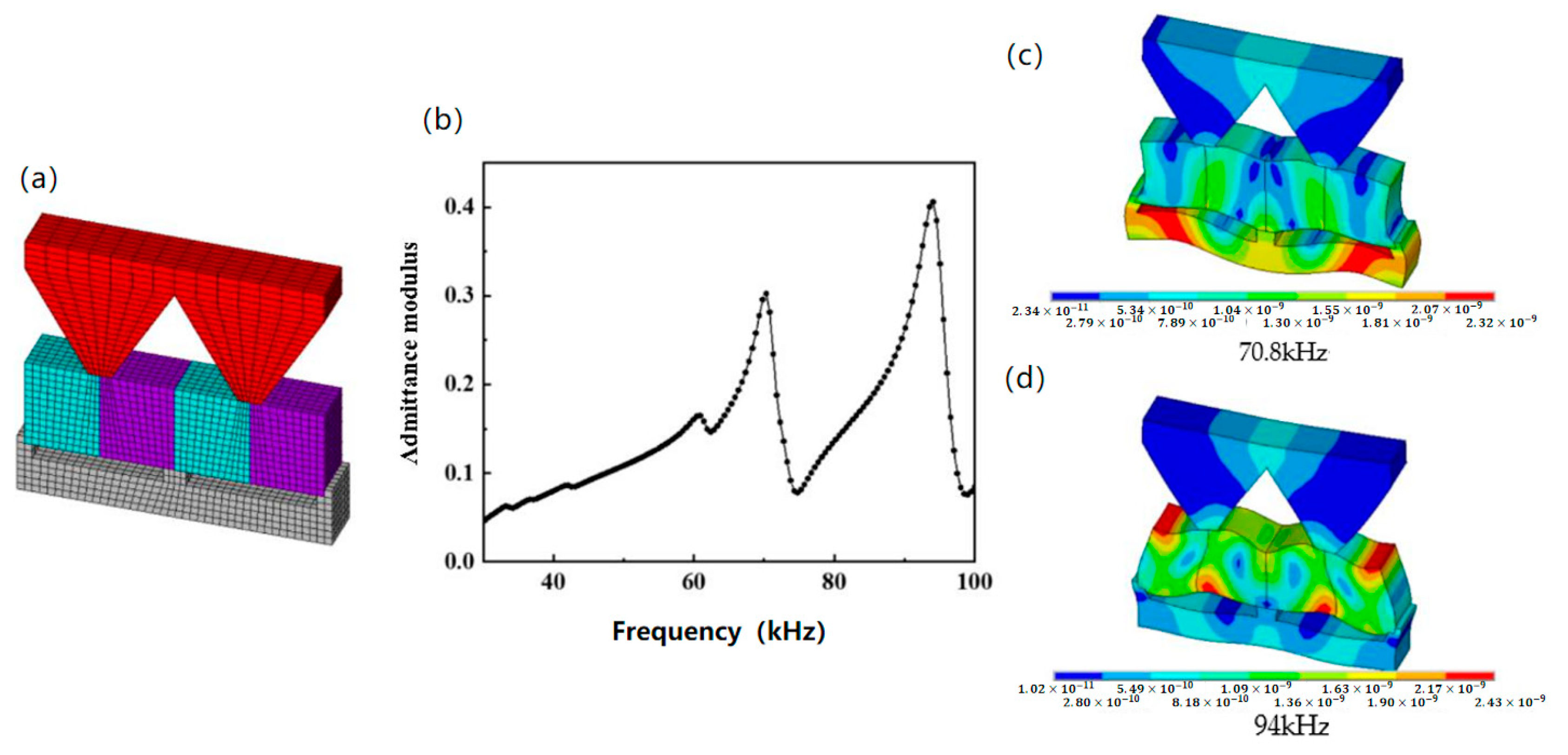
Moreover, a finite element model with bonding of four elements was constructed. The meshed model is shown in
Figure 4a. It also can be seen from the admittance modulus curve that two harmonic peaks at 55.45 and 83.67 kHz were produced in the frequency range of 30–100 kHz after four elements were bonded (
Figure 4b). The anti-resonance frequencies and electromechanical coupling factors for both two harmonic peaks were 58.42 kHz, 0.35 and 90.60 kHz, 0.42, respectively. As we can see, after bonding four elements together, the electromechanical coupling factor dropped from 0.59 to 0.42, and the resonance frequency dropped from 99.34 to 83.67 kHz. The vibration modes corresponding to these two harmonic peaks were observed (
Figure 4c,d). Clearly, the vibration excited by the mode in
Figure 4d has common features with that in
Figure 3. In other words, the maximum strain was mainly concentrated at the four vertexes of the ceramics, and the nodal point was in the center of the ceramics. Therefore, this mode was recognized as the shear vibration mode. Although the mode in
Figure 4c had relatively large displacements at the four vertexes of the ceramics, the nodal point may be in other positions, rather than the center of the ceramics. The mode of the integral structure composed of four ceramic plates was an asymmetric Lamb wave, which was a vibration mode sensitive to the external dimension.
3.3. Finite Element Analysis of Four Elements with a Trapezoid Transition Layer
Furthermore, a third finite element model representing the bonding of four elements, a duralumin transition layer, and a positioning bar was constructed. The meshed model is shown in
Figure 5a. Through exploring the trapezoid transition structure base angle, the
of piezoelectric vibrator vibration transfer effect found that, when the
is 120° the trapezoid transition layer on the surface vibration and minimum whole, each particle vibration almost in the same phase and the longitudinal vibration characteristic is good, which is advantageous to the acoustic radiation in the water, so the design of the base angle is 120° trapezoid transition structure. The admittance modulus curve calculation result shown in
Figure 5b reflected that the piezoelectric oscillator produced two major harmonic peaks at 70.30 and 94.06 kHz in the frequency range of 30–100 kHz. The anti-resonance frequencies and electromechanical coupling factors for both harmonic peaks were 74.76 kHz, 0.37 and 99.01 kHz, 0.34, respectively. As we can see, after bonding four elements, a duralumin transition layer and positioning bar together, the electromechanical coupling factor further dropped to 0.34. The vibration mode in
Figure 5d was consistent with the previous shear vibration mode, while the vibration mode in
Figure 5c was consistent with the mode of asymmetric Lamb wave.
By comparing
Figure 3c,
Figure 4d and
Figure 5d, it can be seen that the shear mode under these three conditions retained common features, namely that the maximum strain was mainly concentrated at the four vertexes of ceramics and the nodal point was in the center of ceramics. Additionally, the resonance frequency changed slightly with different boundary conditions, but the electromechanical coupling factor dropped dramatically when the conditions were different. In particular, when four elements were bonded together, the electromechanical coupling factor dropped more than 29%.
Furthermore, by observing the displacement distribution in the transition layer in
Figure 5d, it can be seen that the shear vibration caused by piezoelectric ceramic was transferred into the transition layer. The vibration spread from the bottom to the upper surface of the transition layer. On the upper surface, the vibration phase and amplitude were basically consistent, thus indicating that the shear vibration mode was successfully transformed into longitudinal vibration mode through the transition layer structure. This facilitated the propagation of sound waves through water.
6. Conclusions
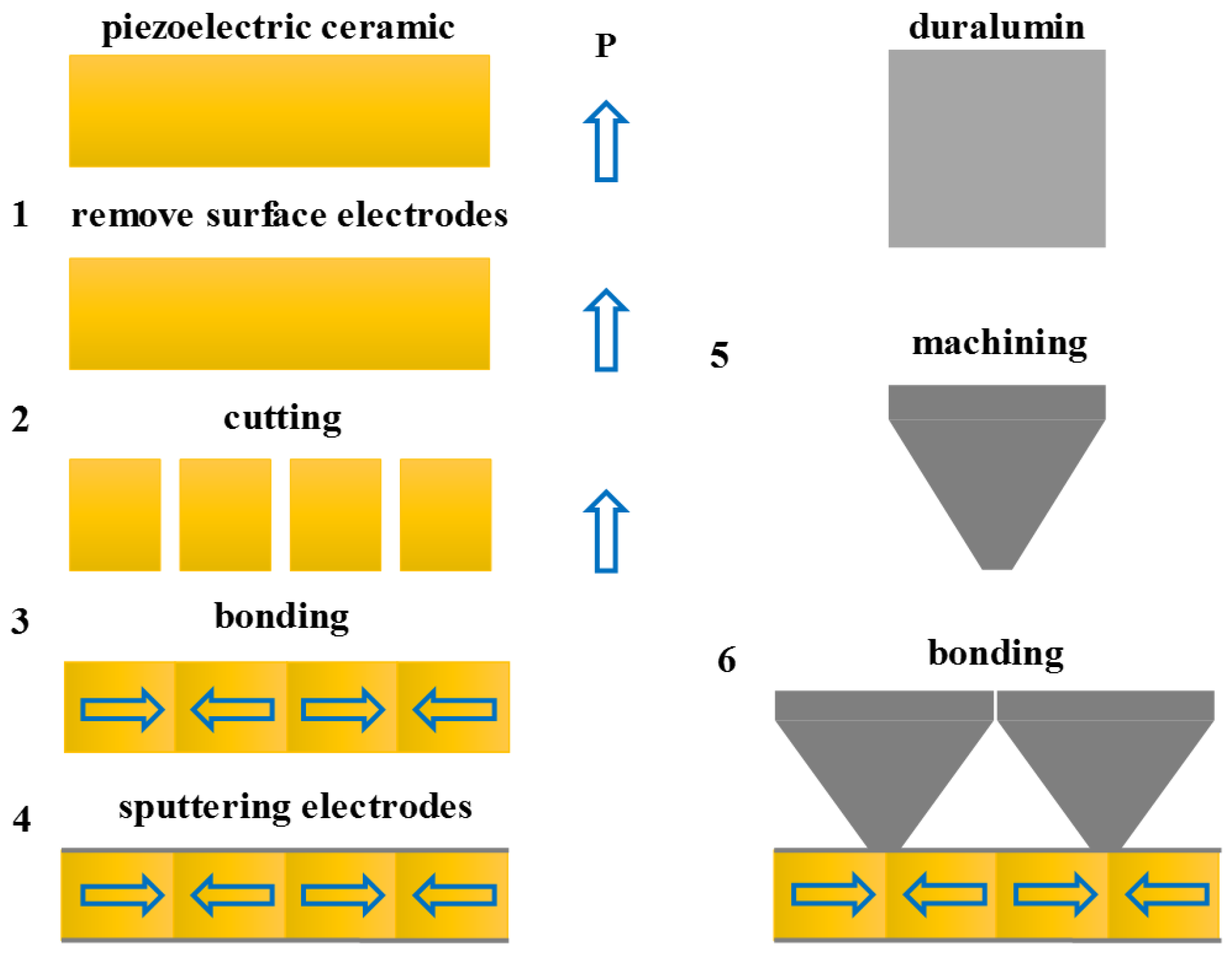
In this study, a novel type of underwater transducer was developed using the
shear vibration mode of piezoelectric ceramic and adding a trapezoid transition layer. A series of simulations on a single element, four bonding elements, and the whole structure were conducted to study how the boundary conditions affect the shear vibration. Under different conditions, the shear mode retained common features, namely that the maximum strain was mainly concentrated at the four vertexes of the ceramics and the nodal point was in the center of the ceramics. This information can help us to identify the vibration mode in the transducer. Additionally, the resonance frequency changed slightly under different conditions. The possibility of using a trapezoid transition layer to transform shear vibrations into longitudinal vibrations was verified. The shear vibrations caused by piezoelectric ceramic were effectively transferred into the transition layer, and the vibration spread from the bottom to the upper surface of the transition layer. This will make the propagation of acoustic waves into water possible. In this study, the electromechanical coupling factors of different oscillators were studied and shown to drop more than 29% when four elements were bonded together. In future studies, this kind of bonding structure will be replaced by a single element working at a high-order shear mode. According to our previous study, high-order shear vibration can have almost the same electromechanical coupling factor as the basic shear mode when the dimensions of piezoelectric ceramic are adjusted correctly [
11].
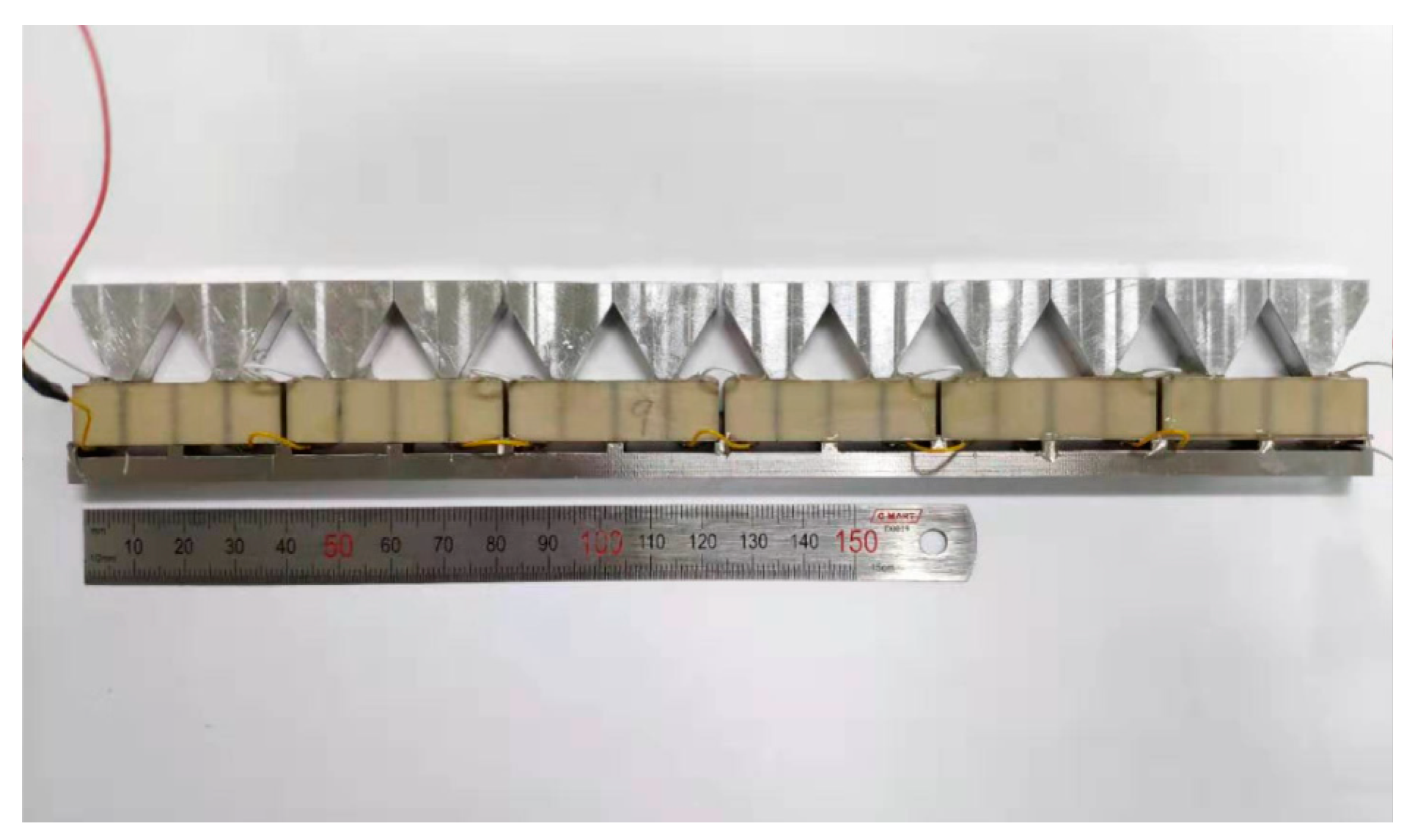
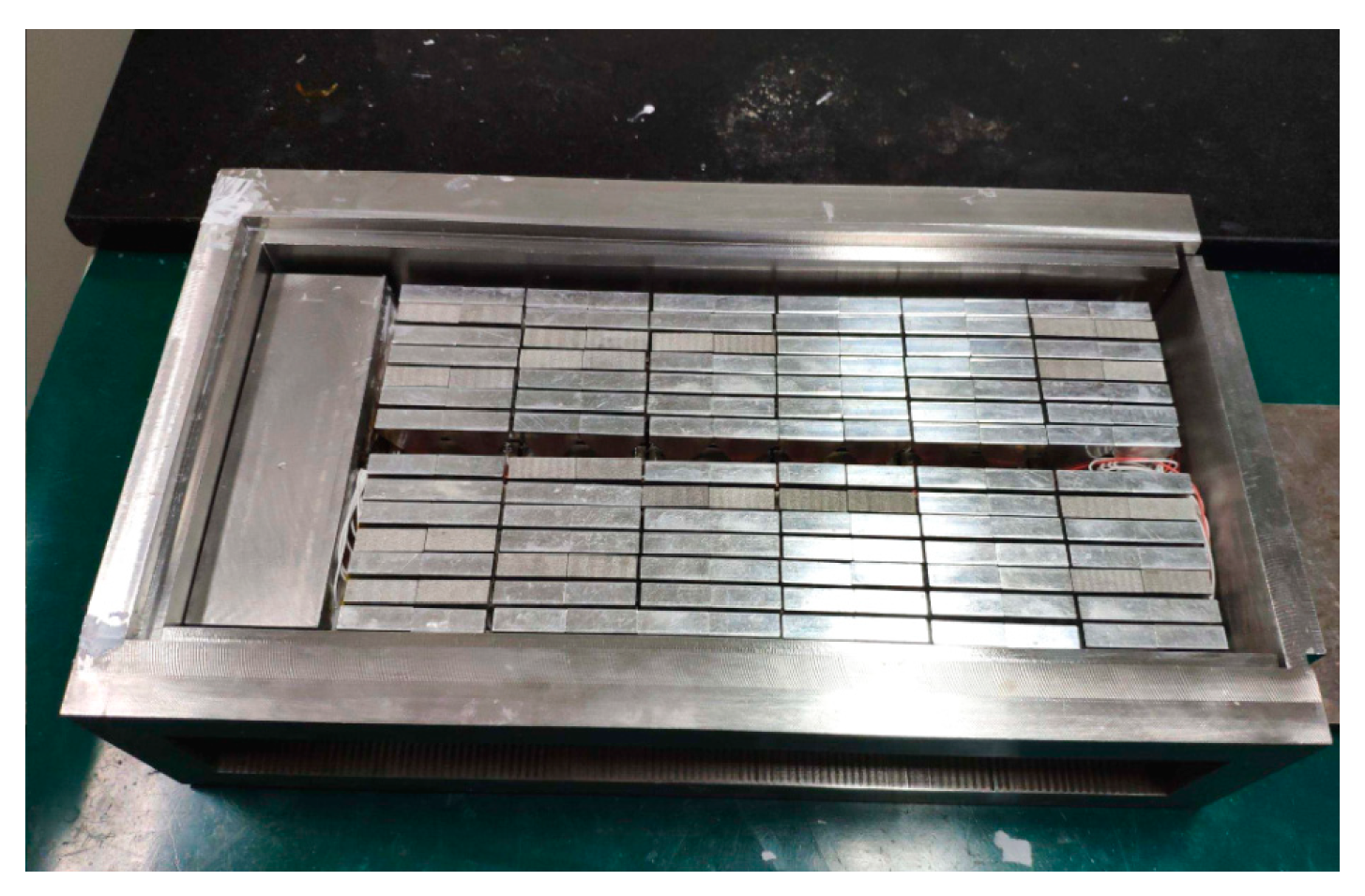
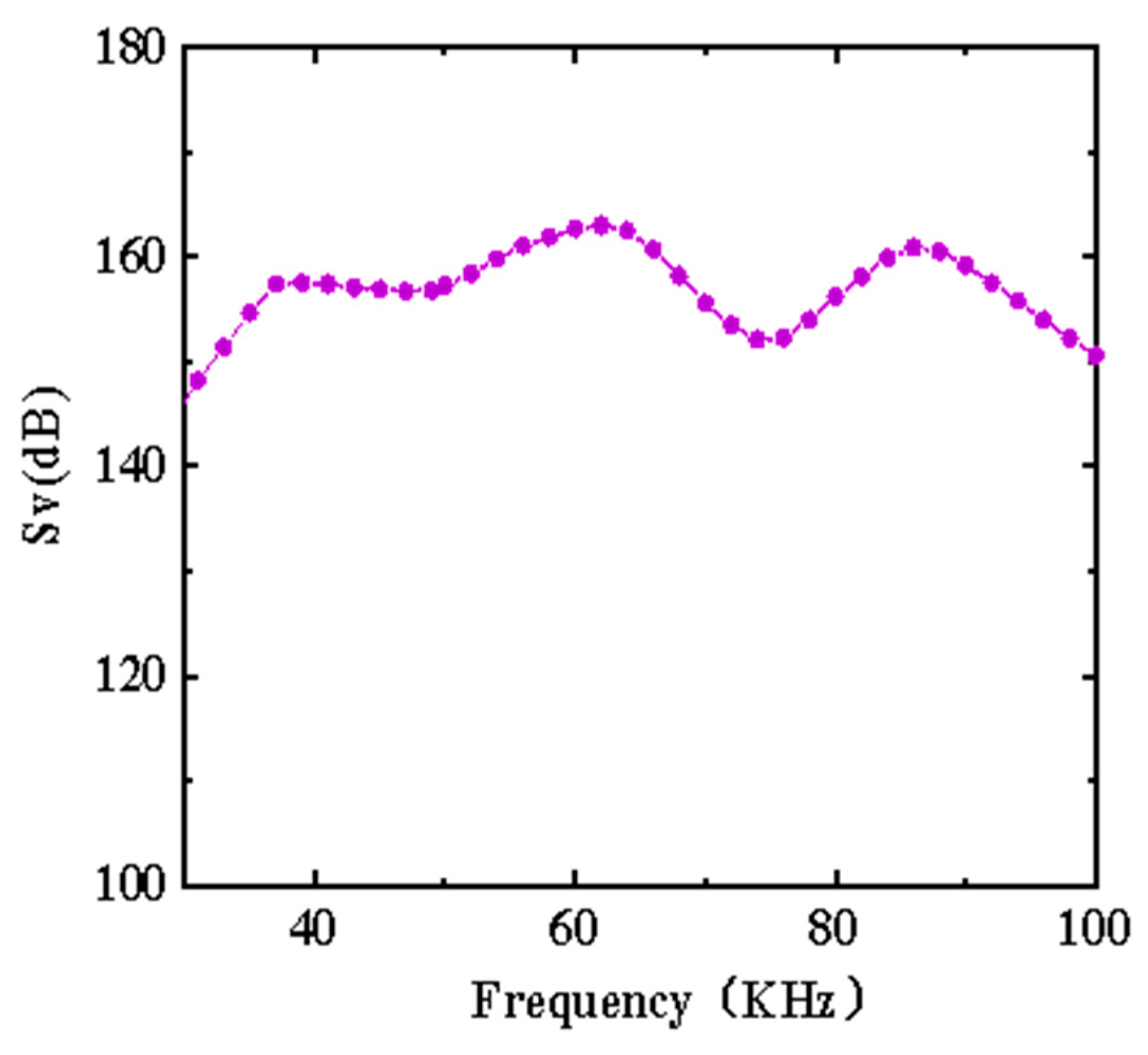
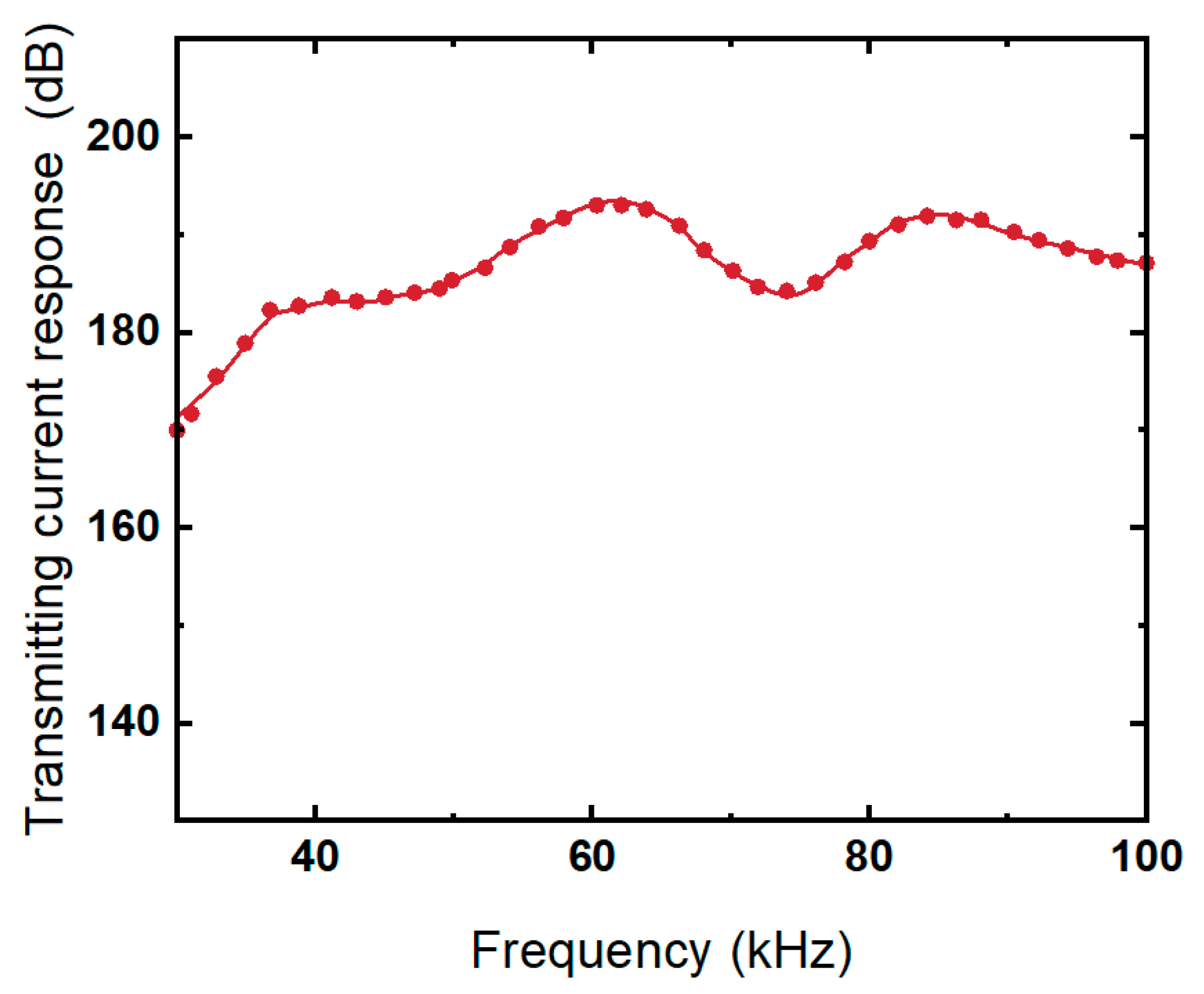
The proposed transducer was prototyped and tested in water. According to experimental results, the transmitting voltage response of the transducer array reached 163 dB (62 kHz) under the radiation area of 120 × 240 mm, and the transmitting voltage response caused by shear vibration mode reached 160.9 dB at 89 kHz. The operating frequency range and bandwidth of this transducer array are 37–68 and 31 kHz, respectively. Therefore, the results demonstrate the possibility of using shear mode in an underwater transducer. This transducer design also provides a new idea for the design of wide-band, low-frequency transducers by introducing the coupling of shear mode and asymmetric Lamb waves.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}