
Research on the Application of MEMS Intelligent Sensor in Abnormal Monitoring of Metro Tunnel by Simplified Model Tests

Abstract
:1. Introduction
2. Experimental Design of Tunnel Anomaly Monitoring Based on MEMS
2.1. Test Materials and Grouping
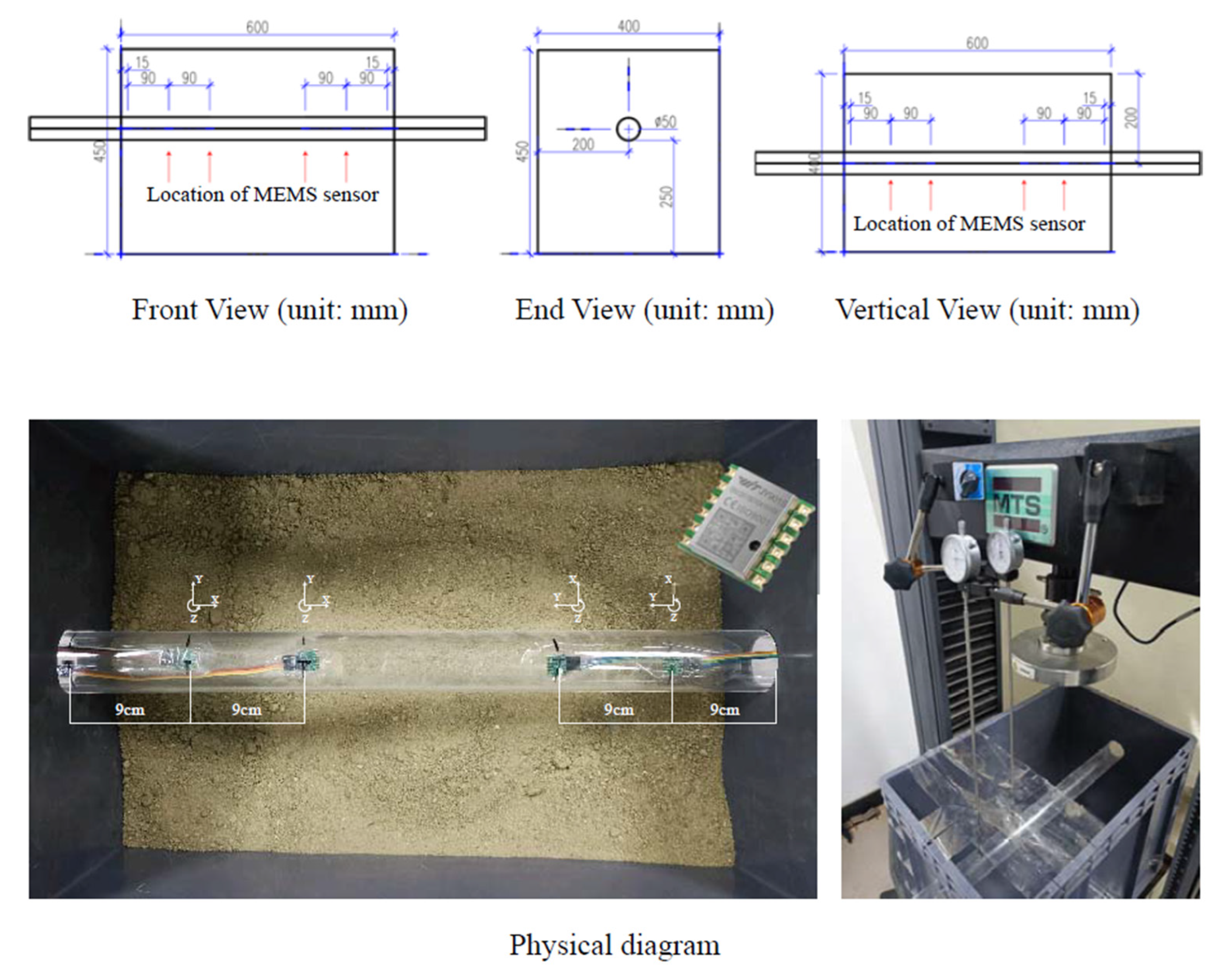
2.2. Tunnel Simulation Scheme
2.2.1. Single Tunnel
2.2.2. Orthogonal Tunnels
3. MEMS Data Processing Method
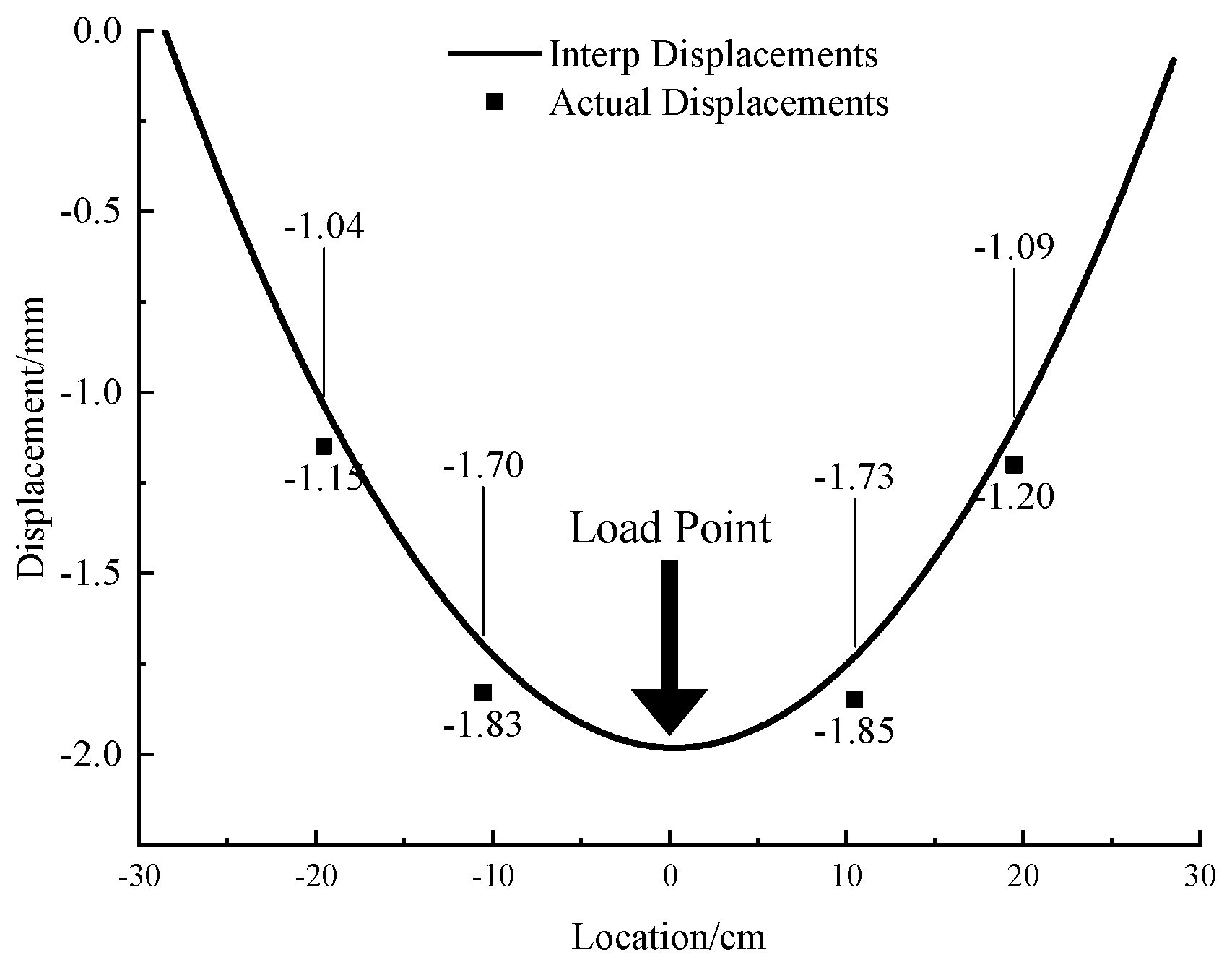
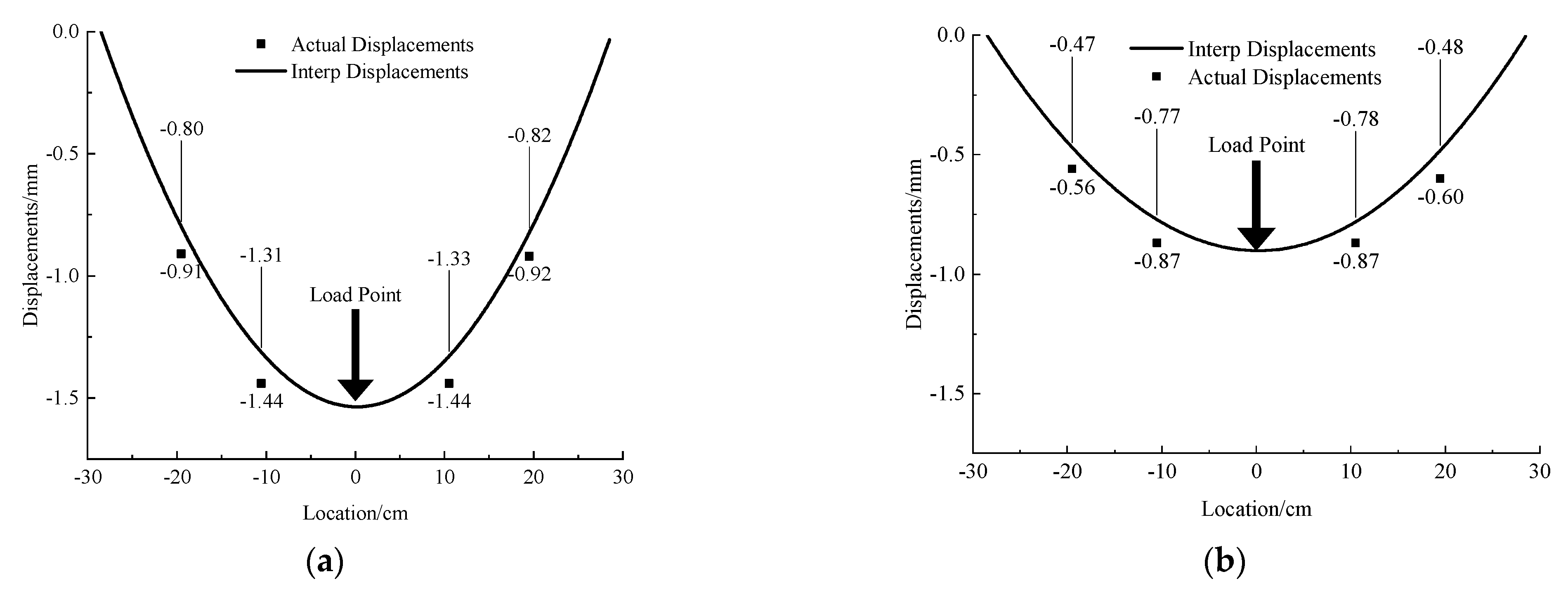
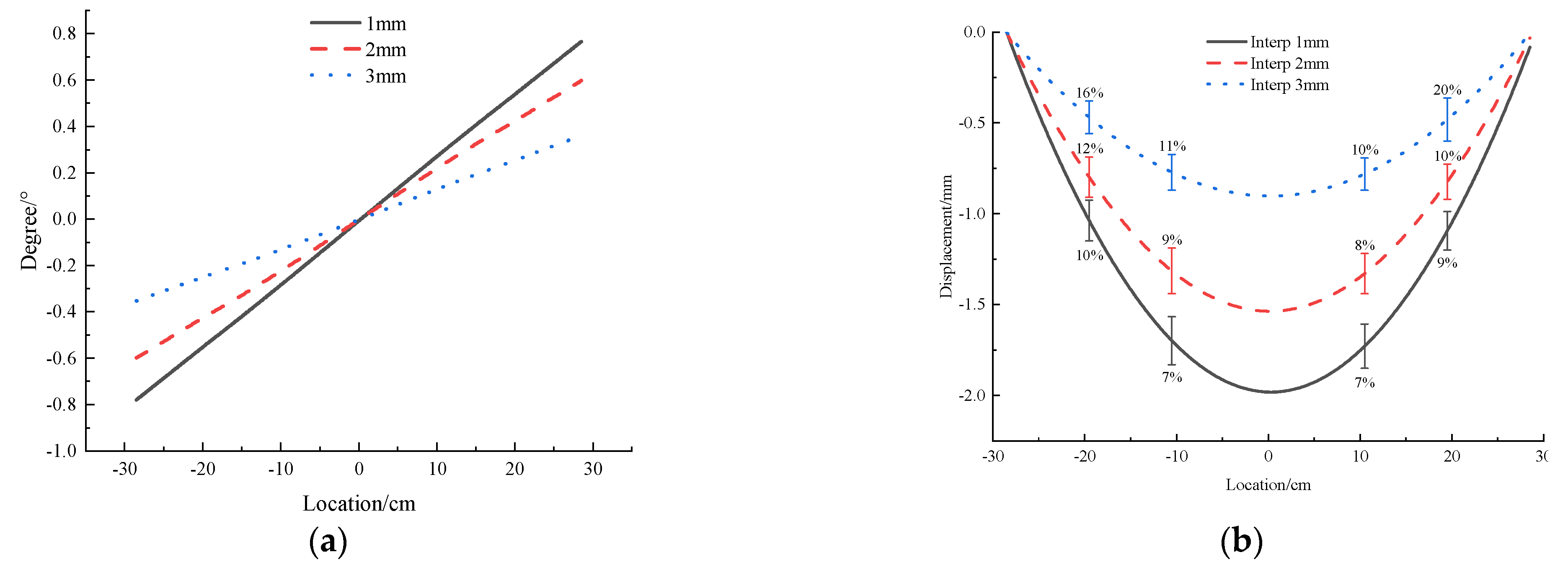
4. Deformation Characteristics of the Tunnel under Concentrated Load
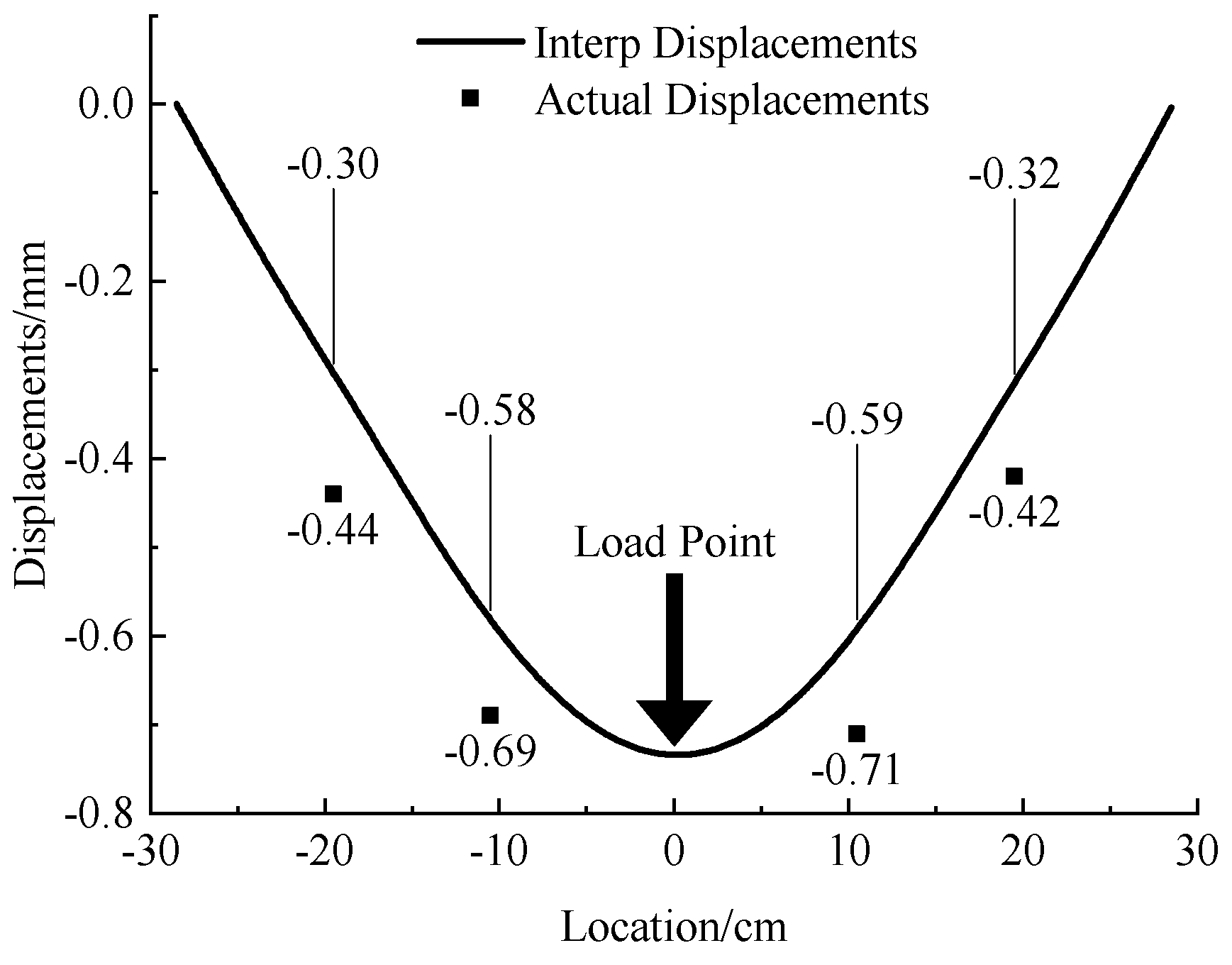
4.1. Acrylic Pipe Simulated Tunnel
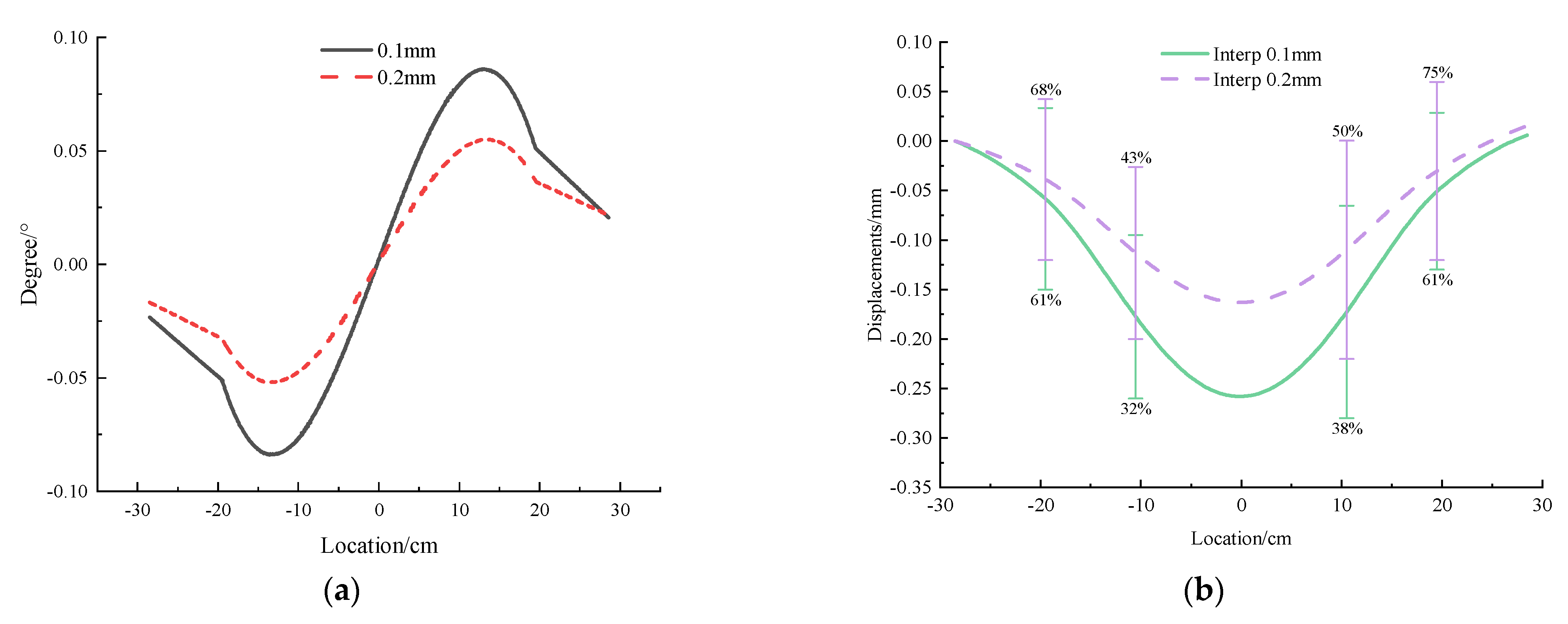
4.2. 304 Steel Pipe Simulated Tunnel
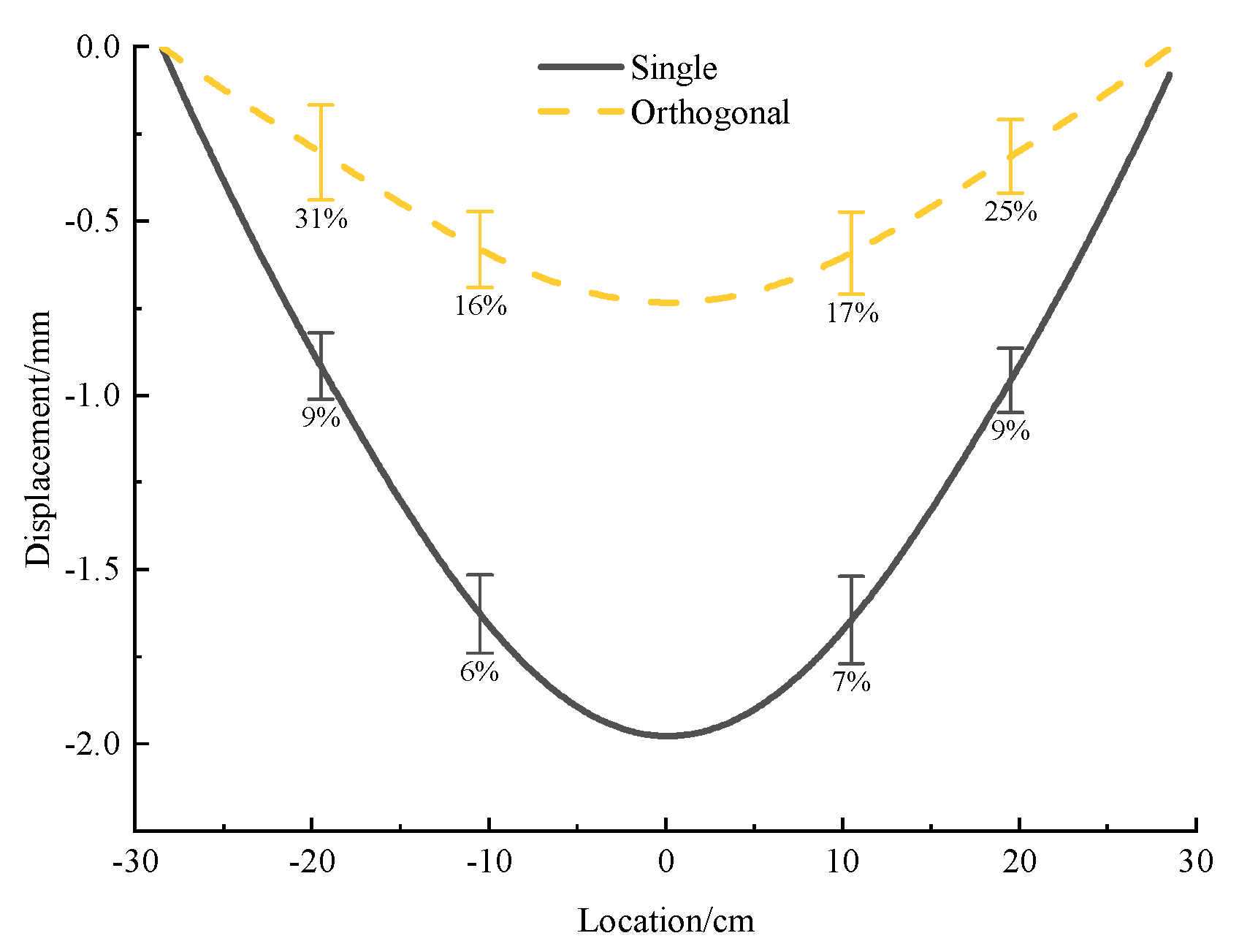
5. Deformation Characteristics of Orthogonal Tunnels under Concentrated Load
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- China Association of Metros. Statistics and Analysis Report of Urban Rail Transit in 2021 [R/OL]; China Association of Metros: Beijing, China, 2022; Available online: https://www.camet.org.cn/tjxx/9944 (accessed on 9 July 2022).
- Bian, J.-Y.; Li, W.-H.; Zheng, Z.-H.; Shan, L.-P.; Chen, W.-J. Development of a Monitoring System Using Fiber Optic Sensing for Electric Cable Tunnels. Geotech. Investig. Surv. 2017, 45, 54–57,66. [Google Scholar]
- Zhong, D.; Tang, Y.-S. Study of Shield Tunnel Convergence Deformation Motoring Using Distributed Optical Fiber Sensing Technology. J. Railw. Sci. Eng. 2016, 13, 1143–1148. [Google Scholar]
- Su, S.-X.; Yang, C.-M.; Fan, X.-A. Application of Fiber Bragg Grating Sensor Technology in Highway Tunnel Surrounding Rock Deformation and Real-Time Monitoring. Eng. Mech. 2014, 13, 134–138, 144. [Google Scholar]
- Huang, J. Application of Fiber Bragg Grating Sensor in Structural Deformation Monitoring of Highway Tunnel. Autom. Instrum. 2016, 38–39. [Google Scholar] [CrossRef]
- Sun, Z.-X.; Zhang, S.-F.; Liu, N. Application and Analysis of Static Level in Deformation Monitoring of Metro Tunnel During Operation. Mod. Tunn. Technol. 2015, 52, 203–208. [Google Scholar]
- Yuan, C.-Z.; Teng, D.-G.; Hu, B.; Liu, X.-H. Application of Three-dimensional Laser Scanning Technology in Metro Tunnel Deformation Monitoring. Bull. Surv. Mapp. 2017, 152–153. [Google Scholar]
- Shi, B.; Xu, X.-J.; Wang, D.; Wang, T.; Zhang, D.; Ding, Y.; Xu, H.-Z.; Cui, H.-L. Study on Botdr-Based Distributed Optical Fiber Strain Measurement For Tunnel Health Diagnosis. Chin. J. Rock Mech. Eng. 2005, 24, 2622–2628. [Google Scholar]
- Wang, S.-H. Current Status and Applications of MEMS Sensors. Micronanoelectron. Technol. 2011, 48, 516–522. [Google Scholar]
- Gu, Y. MEMS Technology Status and Development Prospects. Equip. Electron. Prod. Manuf. 2013, 42, 1–8,49. [Google Scholar]
- Bennett, P.J.; Kobayashi, Y.; Soga, K.; Wright, P. Wireless sensor network for monitoring transport tunnels. Proc. Inst. Civ. Eng. Geotech. Eng. 2010, 163, 147–156. [Google Scholar] [CrossRef]
- Huang, H.-W.; Xu, R.; Zhang, W. Comparative Performance Test of an Inclinometer Wireless Smart Sensor Prototype for Subway Tunnel. Int. J. Archit. Eng. Constr. 2013, 2, 25–34. [Google Scholar] [CrossRef]
- UJ. Deformation Sensing Technology for Subway Shield Construction Based on Wireless Sensor Network [D/OL]. Guangzhou University. 2020. Available online: http://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CMFD&dbname=CMFD202101&filename=1020308767.nh&uniplatform=NZKPT&v=jTczs8gmRmbFG4oxy7iN8MQnZbOz_hF4hBr9WUseKt4prJpzPjtOSJAQ4p8WTb-r (accessed on 19 July 2022).
- Zhang, W.C. The Application of Wireless Sensor Network Technology in Underground Engineering Monitoring [D/OL]. Southeast University. 2016. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CMFD&dbname=CMFD201701&filename=1016247011.nh&uniplatform=NZKPT&v=1lIh0pVJ579lj6V_Fo7FJKwrSq7rFUp6TDhxOMWjErW9qAZFd5Wm0bkVSicg_2-m (accessed on 19 July 2022).
- Zhang, G.-Z.; Tong, L.-Y.; Liu, S.-Y.; Wen, Y.-W. A Tunnel Health Monitoring System Based on Wireless Sensor Network. Chin. J. Undergr. Space Eng. 2013, 9, 2006–2010. [Google Scholar]
- Huang, H.-W.; Zhang, D.-M. Recent Progress on Refined Sensing and Control of Safety and Risk of Long- and Large-Scale Tunnel Lining Structures. China J. Highw. Transp. 2020, 33, 46–61. [Google Scholar] [CrossRef]
- Yu, Y.; Ou, J.-P. Application Design and Integration of MEMS ADXL202 of Wireless Acceleration Sensor. Instrum. Tech. Sens. 2005, 44–45. [Google Scholar]
- Lin, Y.; Lai, J.; Chang, K.; Chang, W.; Lee, F.; Tan, Y. Using mems sensors in the bridge scour monitoring system. J. Chin. Inst. Eng. 2010, 33, 25–35. [Google Scholar] [CrossRef]
- Krüger, M.; Grosse, K. Acoustic emission analysis techniques for wireless sensor networks used for structural health monitoring. In Proceedings of the International Conference on Bridge Maintenance, Porto, Portugal, 16–19 July 2006. [Google Scholar]
- Kurata, N. Actual Application of Ubiquitous Structural Monitoring System Using Wireless Sensor Networks. In Proceedings of the World Conference on Earthquake Engineering, Beijing, China, 12–17 October 2008. [Google Scholar]
- Ceylan, H.; Gopalakrishnan, K.; Kim, S.; Taylor, P.C.; Prokudin, M.; Buss, A.F. Highway Infrastructure Health Monitoring Using Micro-Electromechanical Sensors and Systems (MEMS). Statyba 2013, 19, S188–S201. [Google Scholar] [CrossRef]
- He, B.; Ji, Y.; Shen, R.-J. Wireless Inclinometer for Monitoring Deformation of Underground Tunnel. Opt. Precis. Eng. 2013, 21, 1464–1471. [Google Scholar]
- Chebrolu, K.; Raman, B.; Mishra, N.; Valiveti, P.K.; Kumar, R. BriMon: A Sensor Network System for Railway Bridge Monitoring. In Proceedings of the 6th International Conference on Mobile Systems, Applications, and Services (MobiSys 2008), Breckenridge, CO, USA, 17–20 June 2008; Available online: http://www.researchgate.net/publication/221234590_BriMon_A_sensor_network_system_for_railway_bridge_monitoring (accessed on 11 February 2022). [CrossRef]
- Wei, K.-L.; Wen, Z.-Y.; Zhao, X.-Q.; Zhang, Z.-W.; Zeng, T.-L. Research Advances in MEMS-Based Wireless Sensors Network for Structural Health Monitoring. Piezoelectrics Acoustooptics 2010, 32, 692–696. [Google Scholar]
- Cai, E.; Li, D.-M.; HU, Y.-B.; Wang, Y.-T. Design of Remote Bridge Cable Force Monitoring System based on MEMS. Meas. Control Technol. Instrum. 2015, 41, 68–70. [Google Scholar]
- Wang, Q.-M.; Su, M.-B.; Liu, Y.-H.; Chen, B.-P. Application of MEMS capacitive silicon micro-accelerometer on monitoring the transverse dynamic displacement of bridge. In Proceedings of the 2007 China Instrument, Measurement and Control Technology Exchange Conference, Chengdu, China, April 2007; Volume 2, pp. 352–355. [Google Scholar]
- Lin, W.-H.; Chen, Y.; Xia, M.; Liang, M.-G. Development and Application Analysis of MEMS Sensor Technology. Electron. Compon. Inf. Technol. 2021, 5, 11–12. [Google Scholar] [CrossRef]
- Li, Y.-Y.; Xie, K.; Sun, Y.-M.; Li, J. Model test of large section loess tunnel reinforced by jet grouting piles and its water immersion. Chin. J. Rock Mech. Eng. 2021, 40, 3334–3343. [Google Scholar] [CrossRef]
- Wang, Z.-J.; Lei, F.-Y.; Hou, W.-M.; Wang, L.; Zhou, P.; Jiang, X.-Z. Hydraulic Model Test and Mechanical Behavior of Lining Structure in the Water-filled Large Cross-section Highway Tunnel. China J. Highw. Transp. 2019, 32, 134–144. [Google Scholar] [CrossRef]
- Wei, G.; Zhao, D.-Q.-L.; Huang, R. Summary of Model Test Research on the influence of Shield Construction on adjacent Tunnel. Mod. Tunn. Technol. 2021, 58, 1–8. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Condition | Load Distribution | Tunnel Form | Tunnel Material | Wall Thickness Grouping |
|---|---|---|---|---|
| Homogeneous soil layer | Concentrated load | Single tunnel | Acrylic | 3 mm |
| 2 mm | ||||
| 1 mm | ||||
| Steel | 0.2 mm | |||
| 0.1 mm | ||||
| Cross orthogonal tunnels | Acrylic | 1 mm |
| Parameters | Measuring Range | Resolution |
|---|---|---|
| Acceleration | +16 g | 0.0005 (g/LSB) |
| Angular velocity | ±2000°/s | 0.061 (°/s)/(LSB) |
| Magnetic field intensity | ±2 Gauss | 0.0667mGauss/LSB |
| Pitch, roll angle | X: ±180°, Y: ±90° | 0.1° (Static)/0.5° (Dynamic) |
| Heading angle | Z: ±180° | 1° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Sun, K.; Tian, J.; Wu, X. Research on the Application of MEMS Intelligent Sensor in Abnormal Monitoring of Metro Tunnel by Simplified Model Tests. Micromachines 2022, 13, 1242. https://doi.org/10.3390/mi13081242
Gao Y, Sun K, Tian J, Wu X. Research on the Application of MEMS Intelligent Sensor in Abnormal Monitoring of Metro Tunnel by Simplified Model Tests. Micromachines. 2022; 13(8):1242. https://doi.org/10.3390/mi13081242
Chicago/Turabian StyleGao, Yan, Ketian Sun, Jiayi Tian, and Xiaodong Wu. 2022. "Research on the Application of MEMS Intelligent Sensor in Abnormal Monitoring of Metro Tunnel by Simplified Model Tests" Micromachines 13, no. 8: 1242. https://doi.org/10.3390/mi13081242
APA StyleGao, Y., Sun, K., Tian, J., & Wu, X. (2022). Research on the Application of MEMS Intelligent Sensor in Abnormal Monitoring of Metro Tunnel by Simplified Model Tests. Micromachines, 13(8), 1242. https://doi.org/10.3390/mi13081242