
Human Motion Pattern Recognition and Feature Extraction: An Approach Using Multi-Information Fusion


Abstract
1. Introduction
2. Materials and Methods
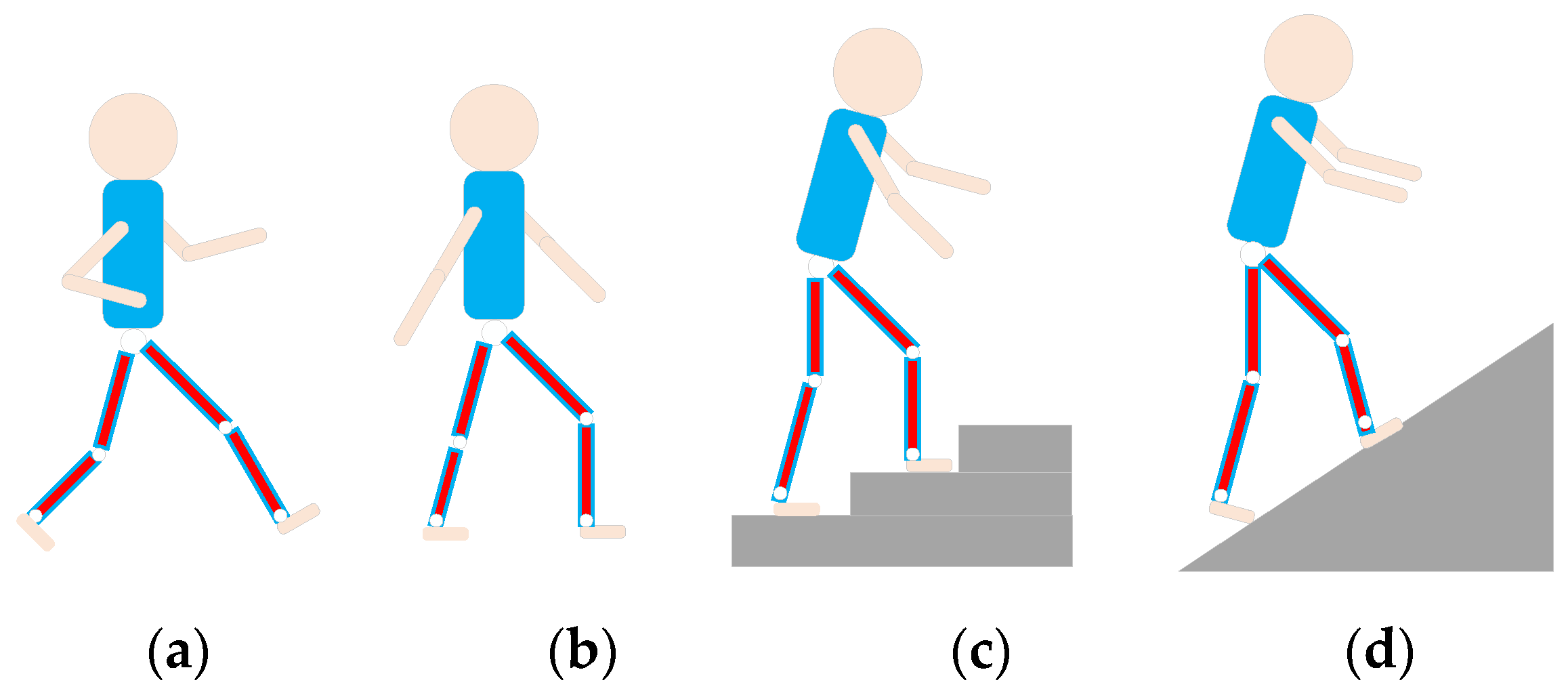
2.1. Analysis of Human Lower Limb Movement Mechanism
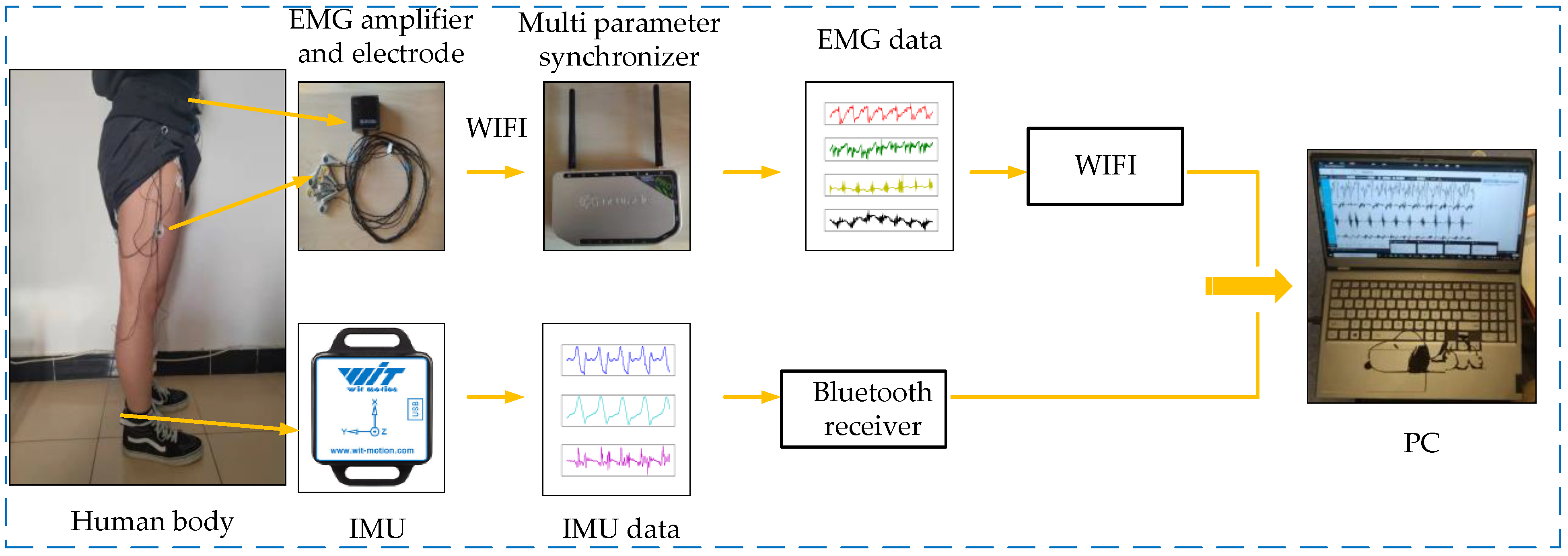
2.2. Wearable Bioelectronics Device of Human Lower Limb Movement Information Fusion
2.3. Installation of the EMG and IMU Sensors
- (1)
- The experiment of human motion information collection is carried out in the laboratory, and the indoor temperature and humidity remain relatively constant.
- (2)
- We removed the hair from the tested muscle, and wiped the skin with alcohol. Then, we used conductive paste to reduce the interference of skin on EMG signals and improve the conductivity and stability of EMG electrodes.
- (3)
- The backing material of the EMG electrode used is non-woven fabric, which has better air permeability. Therefore, it is suitable for long-term skin use and can reduce the interference of sweat and other factors on EMG signals.
- (4)
- The selected IMU and EMG sensors are transmitted wirelessly, which avoids the interference to the normal movement of the human body during data acquisition. The IMU uses the self-developed and improved Kalman filter fusion algorithm to solve the triaxial acceleration, angular velocity, and angle data, which avoids the situation that IMU is vulnerable to electro-magnetic interference and drift under dynamic conditions. The accuracy of acceleration, angular velocity and angle data output under dynamic conditions can reach 0.01 g, 0.05°/s and 0.03°, respectively. The EMG sensor has ultra-low input noise (<0.7 uVpp) and ultra-high input impedance (>1 GOhm), which can ensure high-quality EMG signals.
- (5)
- Based on the IMU and EMG data obtained under the above conditions, we also performed filtering (see Section 2.4 for details) to eliminate noise and interference. Through the above methods, we ensure the reliability and authenticity of the collected data.
2.4. Lower Limb Movement Information Collection Scheme
- (1)
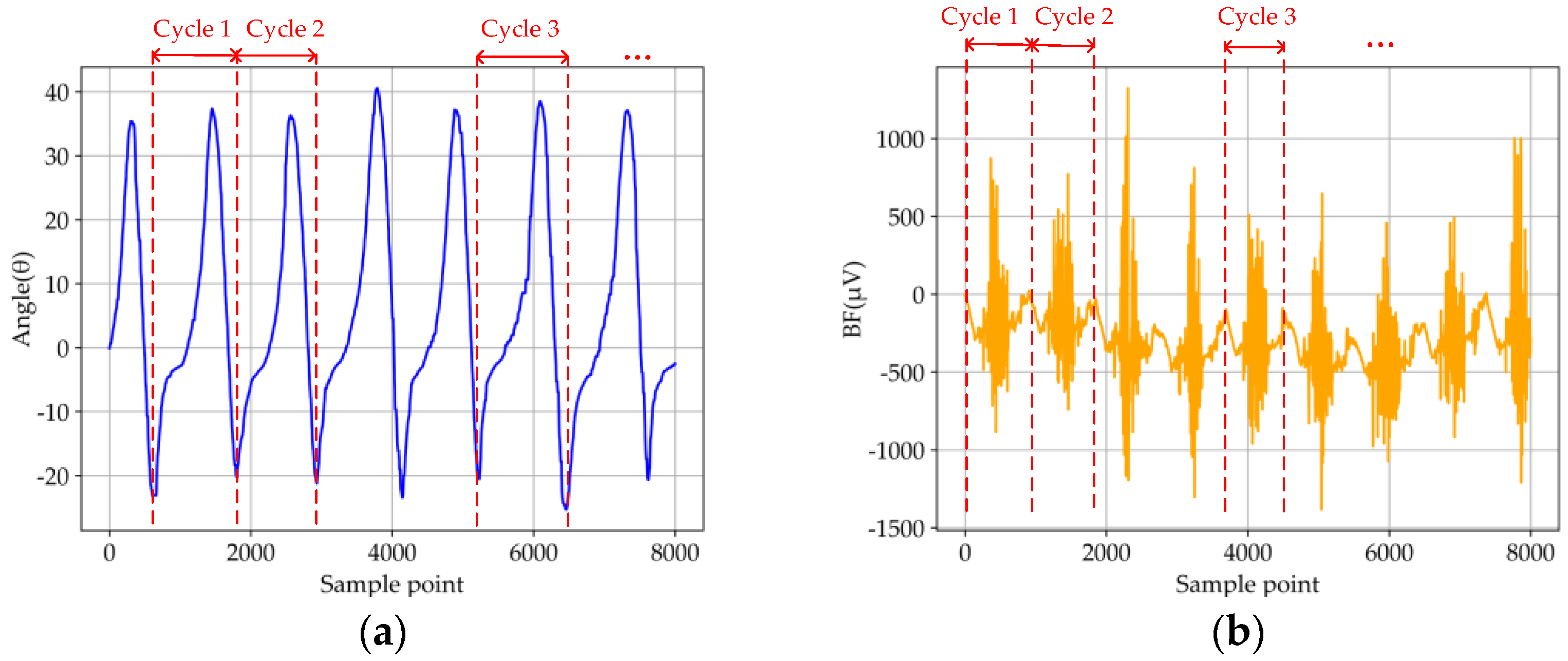
- According to the data repeatability, the IMU and EMG sensors were fixed on the lower limbs under the same conditions in one test. Then, the data illustrate the periodical variations (partial data of IMU and EMG sensors are shown in Figure 4a,b). Therefore, the similarity coefficients between the five random cycles test data of each IMU signal were calculated by using the Pearson correlation, which were higher than 0.87. Next, the fluctuation of the average value of iEMG (integrated EMG) showed a slight oscillation, which the average value and standard deviation of RF, TA, BF, and GA are 188.609 ± 3.109, 127.313 ± 2.050, 262.253 ± 3.948 and 459.762 ± 3.274, respectively. To sum up, the results indicate that the data of five random cycles with each signal presented preferable similarity and repeatability.
- (2)
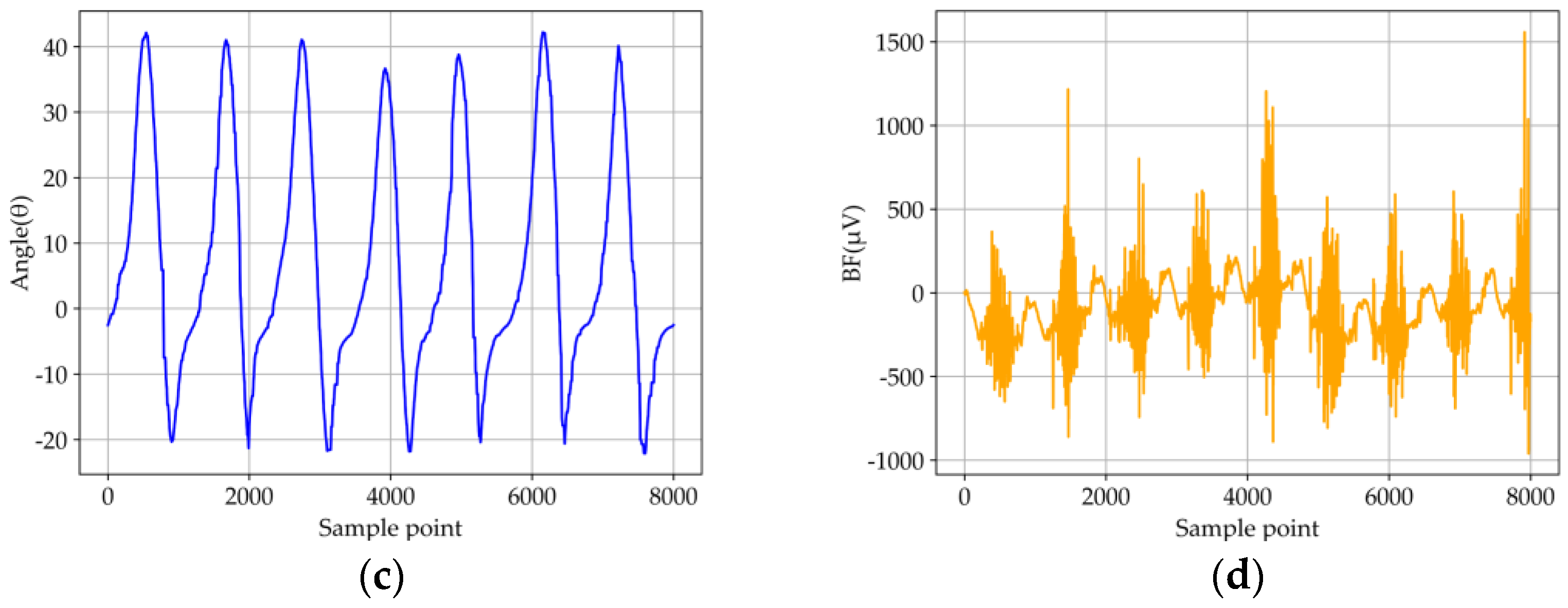
- According to the reproducibility of the data, another three group tests with the running motion mode were carried out under the same position, same sensor, and same nominal program (partial data of IMU and EMG sensors are shown in Figure 4c,d). Then, a similar approach was also adopted to validate the reproducibility with the data under the same sample periods in the four groups. Specifically, the similarity coefficients were calculated for IMU data, and the average value of iEMG were calculated for EMG data intercepted by each group of tests. The conclusions showed the similarity coefficients among each group of IMU signal data intercepted were higher than 0.85, and the average value and standard deviation of RF, TA, BF, and GA are 188.609 ± 3.109, 127.313 ± 2.050, 262.253 ± 3.948 and 459.762 ± 3.274, respectively. To sum up, it is indicated that the reproducibility among each group of data under the different tests can be demonstrated.
2.5. Feature Extraction
2.5.1. Extracting Features Based on Traditional Manual Design
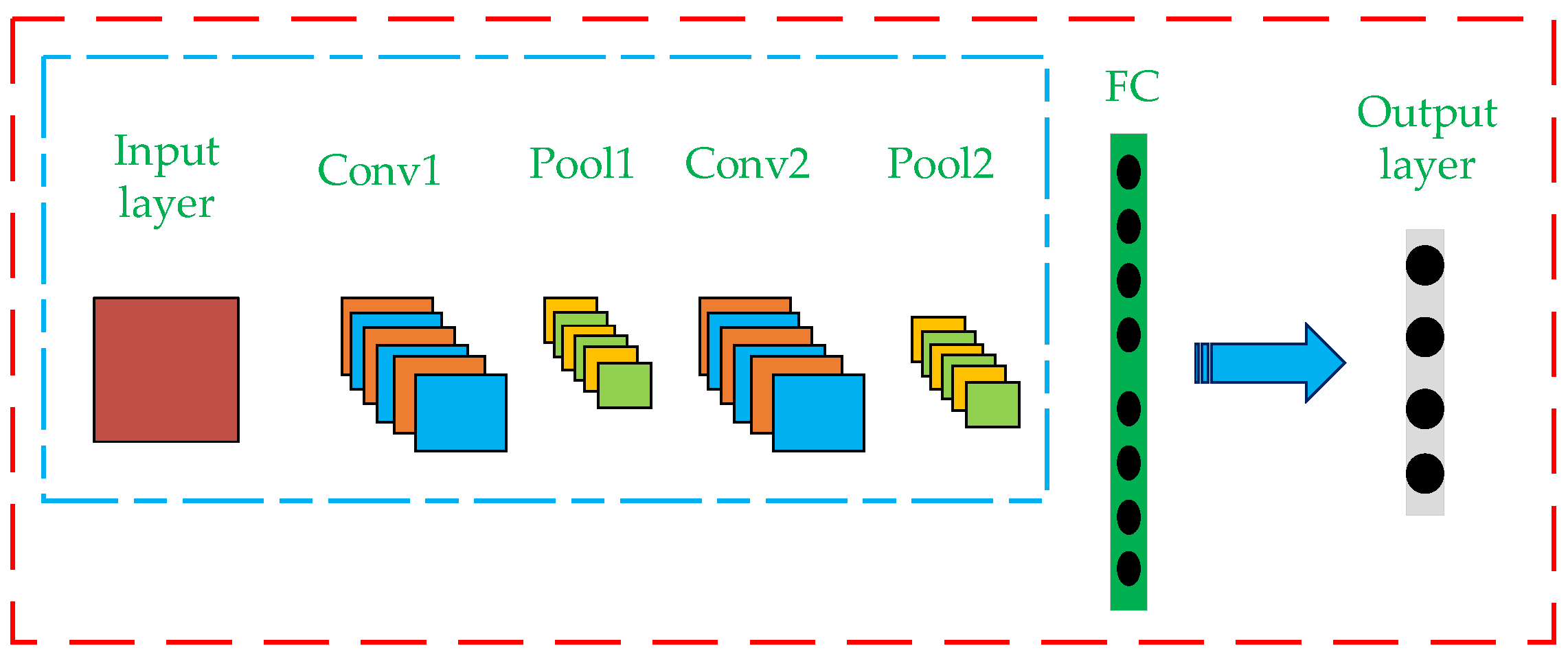
2.5.2. Feature Extraction Based on Dual Stream CNN-ReliefF
- (1)
- First, sample S is randomly selected from the initial feature set.
- (2)
- From the samples with the same label as the sample, samples are determined according to the nearest neighbor principle, constituting the sample subset .
- (3)
- According to the nearest neighbor principle, samples with different labels from the sample are successively determined to form the sample subset .
- (4)
- Calculate the weight of each feature.where represents the proportion of samples with category in the training set, and represents the proportion of samples with the same category as the sample . if is continuous,if is discrete,where and represent the value of feature on sample and , respectively.
- (5)
- The above process is iterated times in order to select random samples. Finally, filter the features whose weight corresponding to the calculated features is less than the set threshold.
- (1)
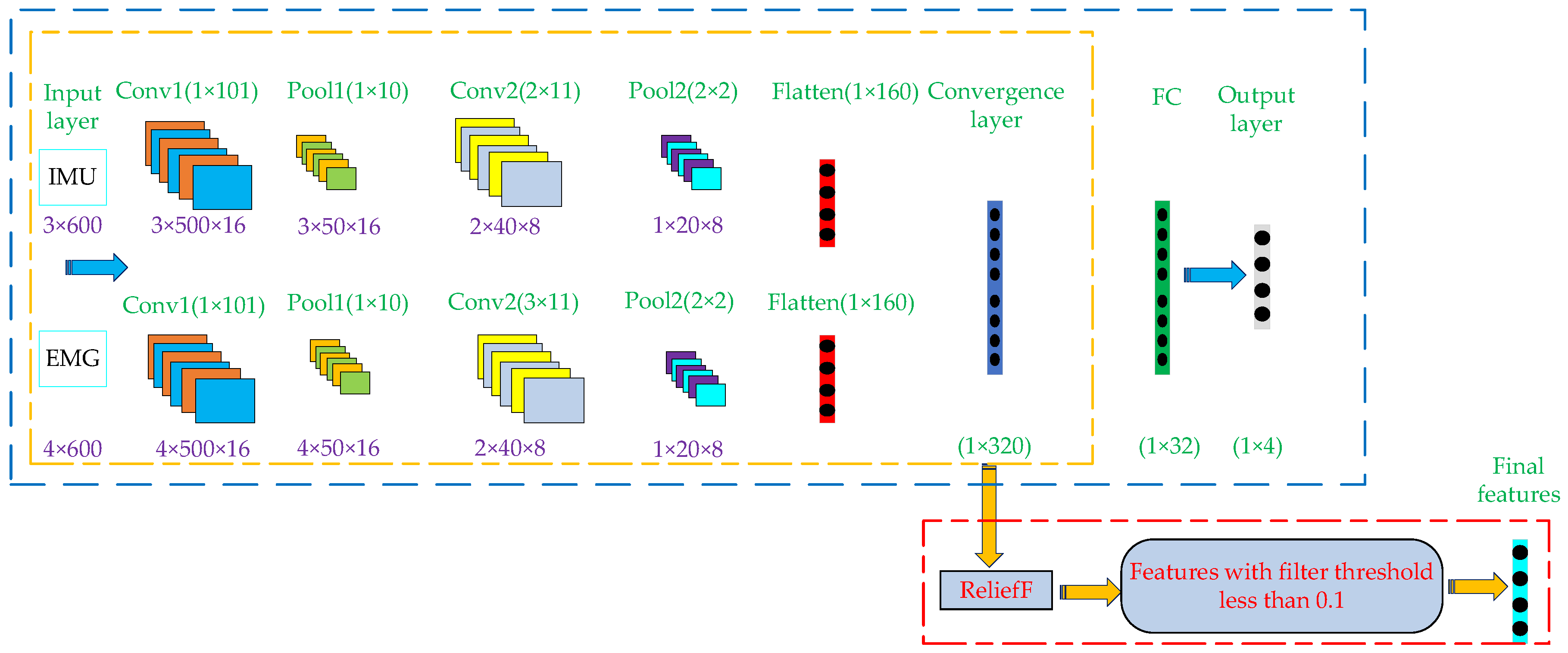
- The data set from IMU sensors is divided into the training set, verification set and test set according to the ratio of 7:1:2, and the data set of EMG sensors is also divided according to the above method. In order to facilitate the input of IMU and EMG data into the model, the input size of IMU data is set as 3 × 600, where 3 is the number of channels (acceleration, angular velocity, angle), and 600 is the length of input data. Then, set the input size of EMG data as 4 × 600, where 4 is the number of channels (RF, TA, BF, GA), and 600 is the length of input data.
- (2)
- Build a complete Dual Stream CNN recognition model. The purpose of inputting the training sets of IMU and EMG into the model is to train the model. In the whole process of model training, the convolution kernel size of EMG data twice convolution operation is set to 1 × 101 and 3 × 11. The convolution kernel depth is 16 and 8, respectively. The pool kernel size of the two pooling operations is set to 1 × 10 and 2 × 2, respectively. Compared with EMG data, IMU data is only different from EMG data in the convolution kernel setting in the second convolution process, which size is set to 2 × 11, and the other parameters are the same setting. After two convolution and pooling operations, the two types of training sets are expanded into 1 × 160 eigenvectors, respectively. Then, the two feature vectors are fused and operated in the convergence layer and the full connection layer to generate 1 × 320 and 1 × 32 feature vectors, respectively. Finally, the feature vector is input into the Output layer to export the classification results. After the above steps, the final required features can be formed, and the formed features will be transmitted to the classifier for motion pattern recognition. After the above steps, the complete Dual Stream CNN recognition model training is completed.
- (3)
- The training set and test set of IMU and EMG are input into the trained Dual Stream CNN recognition model, and the features before the full connection layer are reserved, which are the fusion features of the training set and test set respectively. Finally, ReliefF algorithm is used to filter the above fusion features with weights lower than 0.1.
2.6. Classifier
3. Results and Discussions
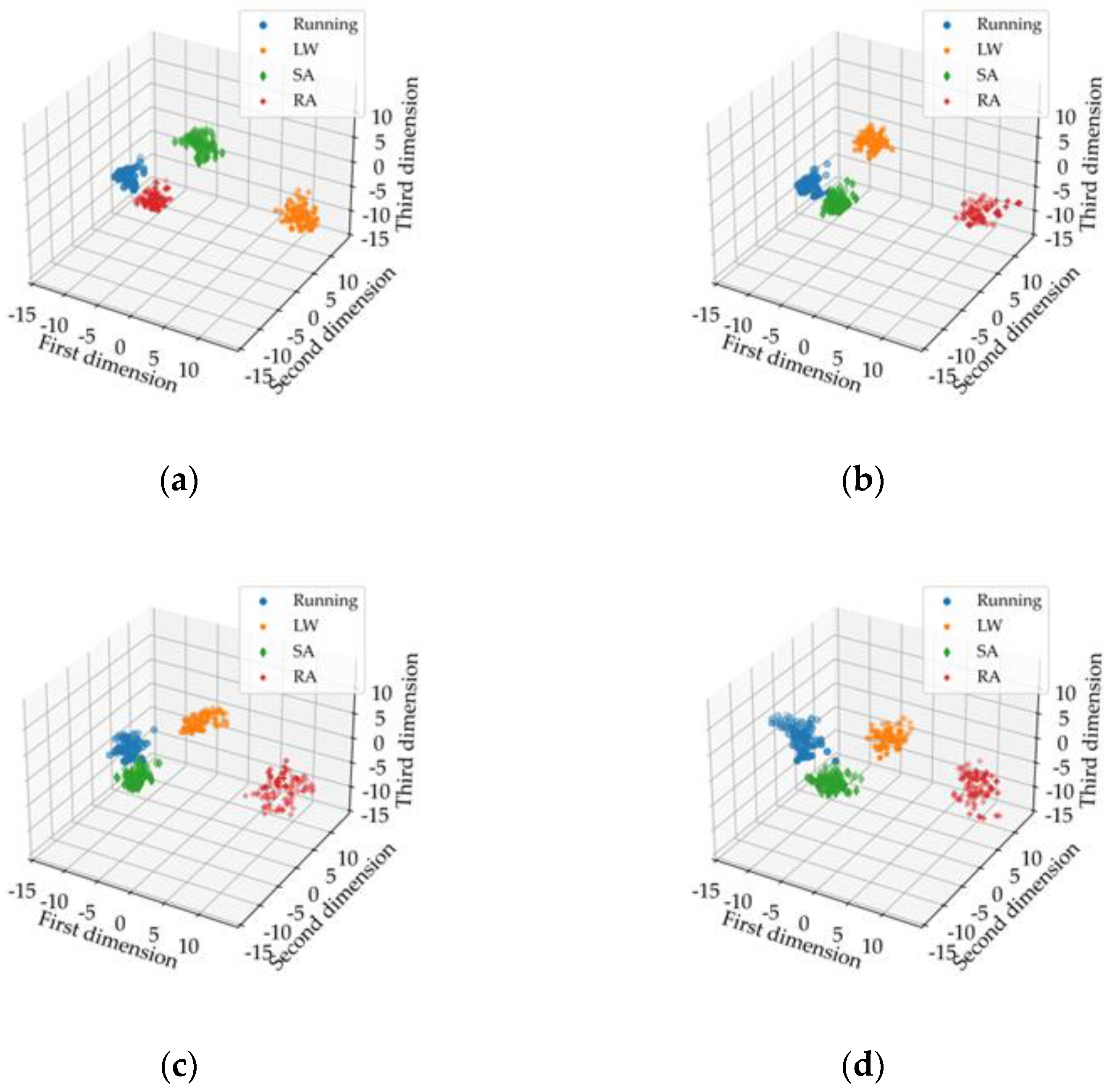
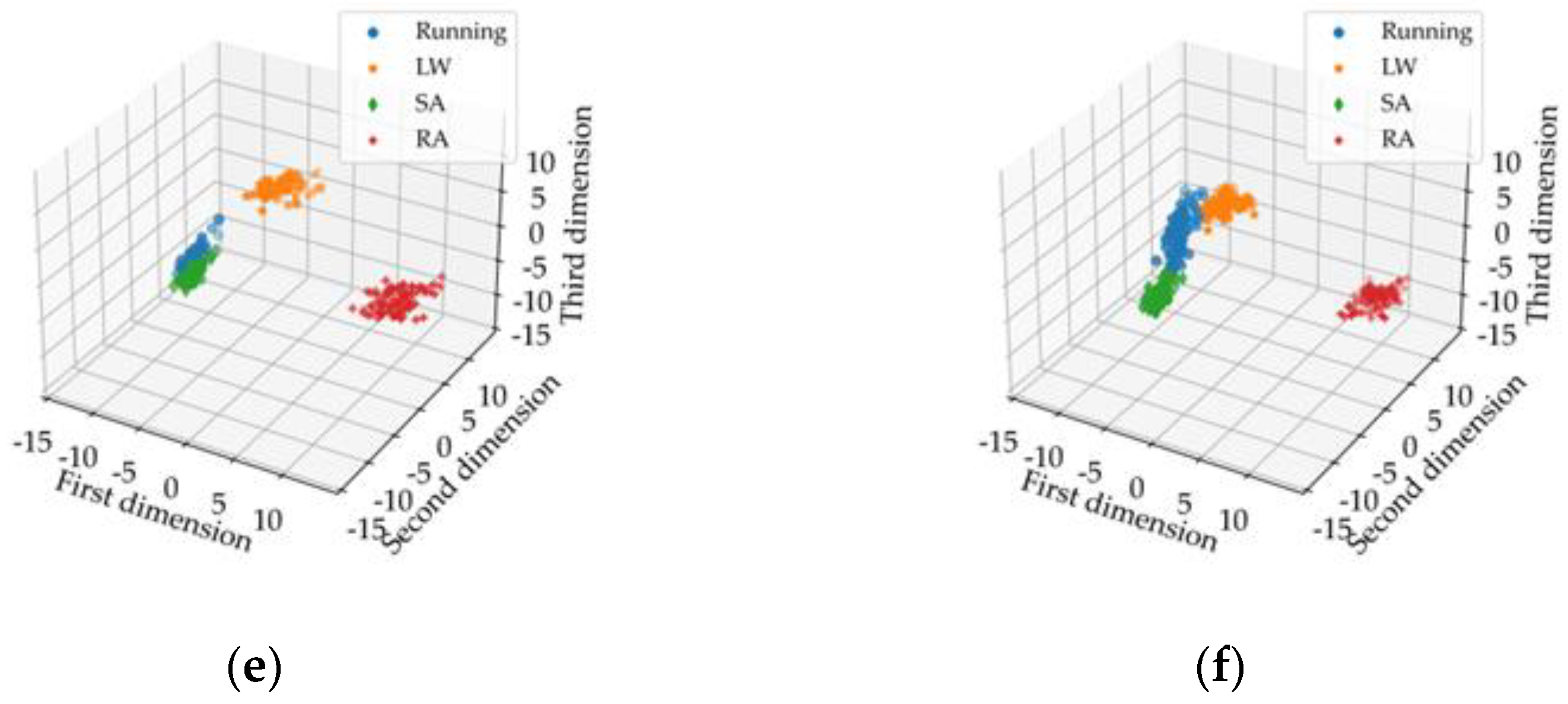
3.1. Visual Analysis of Extracted Features Based on Different Methods and Different Types of Sensor Data
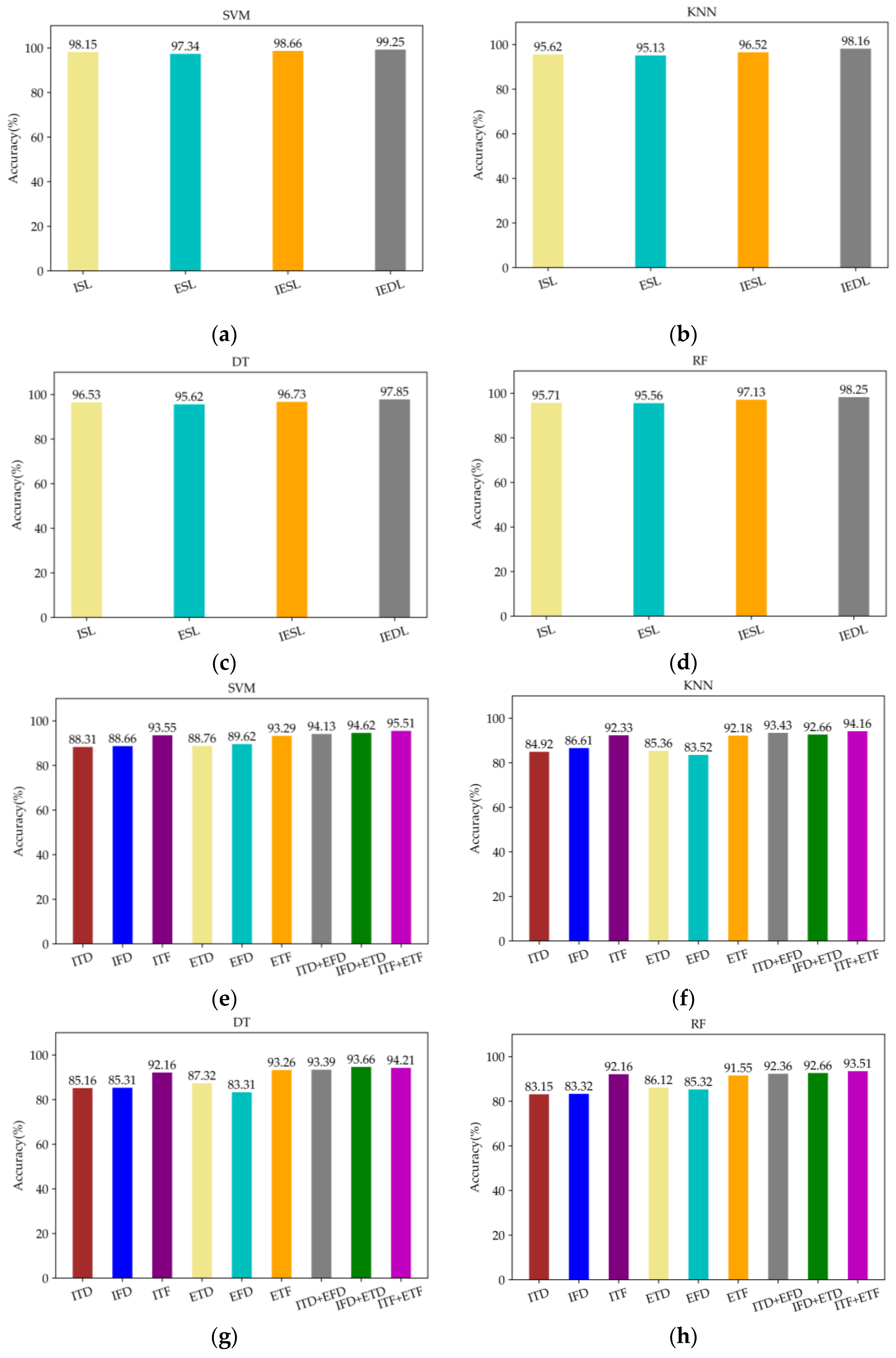
3.2. Recognition Accuracy Analysis of Extracted Features Based on Different Methods and Different Types of Sensor Data
3.3. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zheng, Y.; Song, Q.; Liu, J.; Song, Q.; Yue, Q. Research on motion pattern recognition of exoskeleton robot based on multimodal machine learning model. Neural. Comput. Appl. 2020, 32, 1869–1877. [Google Scholar] [CrossRef]
- Kalita, B.; Narayan, J.; Dwivedy, S.K. Development of Active Lower Limb Robotic-Based Orthosis and Exoskeleton Devices: A Systematic Review. Int. J. Soc. Robot 2021, 13, 775–793. [Google Scholar] [CrossRef]
- Pérez Vidal, A.F.; Rumbo Morales, J.Y.; Ortiz Torres, G.; Sorcia Vázquez, F.D.J.; Cruz Rojas, A.; Brizuela Mendoza, J.A.; Rodríguez Cerda, J.C. Soft Exoskeletons: Development, Requirements, and Challenges of the Last Decade. Actuators 2021, 10, 166. [Google Scholar] [CrossRef]
- Islam, M.R.; Assad-Uz-Zaman, M.; Brahmi, B.; Bouteraa, Y.; Wang, I.; Rahman, M.H. Design and Development of an Upper Limb Rehabilitative Robot with Dual Functionality. Micromachines 2021, 12, 870. [Google Scholar] [CrossRef]
- Wang, X.; Feng, Y.; Zhang, J.; Li, Y.; Niu, J.; Yang, Y.; Wang, H. Design and Analysis of a Lower Limb Rehabilitation Training Component for Bedridden Stroke Patients. Machines 2021, 9, 224. [Google Scholar] [CrossRef]
- Shi, Y.; Guo, M.; Zhong, H.; Ji, X.; Xia, D.; Luo, X.; Yang, Y. Kinetic Walking Energy Harvester Design for a Wearable Bowden Cable-Actuated Exoskeleton Robot. Micromachines 2022, 13, 571. [Google Scholar] [CrossRef]
- Zhang, X.; Tao, S. Research on Pattern Recognition of Lower Limb Motion Based on Convolutional Neural Network. Wirel. Commun. Mob. Comput. 2022, 2022, 4717413. [Google Scholar] [CrossRef]
- Song, G.; Wang, Y.; Wang, M.; Li, Y. Lower Limb Movement Intent Recognition Based on Grid Search Random Forest Algorithm. In Proceedings of the 3rd International Conference on Robotics, Control and Automation, Chengdu, China, 11–13 August 2018; pp. 225–229. [Google Scholar]
- Lopez-Delis, A.; Delisle-Rodriguez, D.; Villa-Parra, A.C.; Bastos-Filho, T. Knee Motion Pattern Classification from Trunk Muscle Based on sEMG Signals. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 2604–2607. [Google Scholar]
- Xi, X.; Tang, M.; Miran, S.M.; Luo, Z. Evaluation of Feature Extraction and Recognition for Activity Monitoring and Fall Detection Based on Wearable sEMG Sensors. Sensors 2017, 17, 1229. [Google Scholar] [CrossRef]
- Peng, Z.; Cao, C.; Liu, Q.; Pan, W. Human Walking Pattern Recognition Based on KPCA and SVM with Ground Reflex Pressure Signal. Math. Probl. Eng. 2013, 2013, 143435. [Google Scholar] [CrossRef]
- Zhang, J.; Soangra, R.; Lockhart, T.E. Automatic Detection of Dynamic and Static Activities of the Older Adults Using a Wearable Sensor and Support Vector Machines. Science 2020, 2, 62. [Google Scholar] [CrossRef]
- Dhindsa, I.S.; Agarwal, R.; Ryait, H.S. Performance evaluation of various classifiers for predicting knee angle from electromyography signals. Expert Syst. 2019, 36, e12381. [Google Scholar] [CrossRef]
- Gupta, P.; Dallas, T. Feature Selection and Activity Recognition System Using a Single Triaxial Accelerometer. IEEE Trans. Bio-Med. Eng. 2014, 61, 1780–1786. [Google Scholar] [CrossRef] [PubMed]
- Fang, C.; He, B.; Wang, Y.; Cao, J.; Gao, S. EMG-Centered Multisensory Based Technologies for Pattern Recognition in Rehabilitation: State of the Art and Challenges. Biosensors 2020, 10, 85. [Google Scholar] [CrossRef]
- Li, J.; Li, G.; Zhang, L.; Yang, D.; Wang, H. Advances and Key Techniques of Soft Wearable Lower Limb Power-assisted Robots. Acta Autom. Sin. 2020, 46, 427–438. [Google Scholar]
- Chen, W.; Li, J.; Zhu, S.; Zhang, X.; Men, Y.; Wu, H. Gait Recognition for Lower Limb Exoskeletons Based on Interactive Information Fusion. Appl. Bionics Biomech. 2022, 2022, 9933018. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Jafari, R.; Kehtarnavaz, N. A survey of depth and inertial sensor fusion for human action recognition. Multimed. Tools Appl. 2017, 76, 4405–4425. [Google Scholar] [CrossRef]
- Wang, J.; Wang, L.; Xi, X.; Miran, S.M.; Xue, A. Estimation and Correlation Analysis of Lower Limb Joint Angles Based on Surface Electromyography. Electronics 2020, 9, 556. [Google Scholar] [CrossRef]
- Gao, F.; Tian, T.; Yao, T.; Zhang, Q. Human Gait Recognition Based on Multiple Feature Combination and Parameter Optimization Algorithms. Comput. Intell. Neurosci. 2021, 2021, 6693206. [Google Scholar] [CrossRef]
- Novak, D.; Riener, R. A survey of sensor fusion methods in wearable robotics. Robot. Auton. Syst. 2015, 73, 155–170. [Google Scholar] [CrossRef]
- Yin, Z.; Zheng, J.; Huang, L.; Gao, Y.; Peng, H.; Yin, L. SA-SVM-Based Locomotion Pattern Recognition for Exoskeleton Robot. Appl. Sci. 2021, 11, 5573. [Google Scholar] [CrossRef]
- Bunderson, N.E.; Kuiken, T.A. Quantification of Feature Space Changes with Experience during Electromyogram Pattern Recognition Control. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 239–246. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Afzal, T.; White, G.; Wright, A.B.; Iqbal, K. Locomotion Mode Identification for Lower Limbs using Neuromuscular and Joint Kinematic Signals. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 4071–4074. [Google Scholar]
- Chen, J.; Sun, Y.; Sun, S. Improving Human Activity Recognition Performance by Data Fusion and Feature Engineering. Sensors 2021, 21, 692. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Chen, Z.; Yue, W. Spatio-temporal two-stream human action recognition model based on video deep learning. J. Comput. Appl. 2018, 38, 895. [Google Scholar]
- Kononenko, I. Estimating attributes: Analysis and Extensions of Relief, European Conference on Machine Learning. In Proceedings of the European Conference on Machine Learning (ECML), Catania, Italy, 6–8 April 1994; Springer: Berlin/Heidelberg, Germany, 1994; pp. 171–182. [Google Scholar]
- Padovan, B.; Sackmann, S.; Eymann, T.; Pippow, I. A Prototype for an Agent-Based Secure Electronic Marketplace Including Reputation-Tracking Mechanisms. Int. J. Electron. Commer. 2002, 6, 93–113. [Google Scholar] [CrossRef][Green Version]
- Azzedin, F.; Maheswaran, M. Integrating Trust into Grid Resource Management Systems. In Proceedings of the International Conference on Parallel Processing, Vancouver, BC, Canada, 21–21 August 2002; pp. 47–54. [Google Scholar]
- Huang, H.; Kuiken, T.A.; Lipschutz, R.D. A Strategy for Identifying Locomotion Modes Using Surface Electromyography. IEEE Trans. Bio-Med. Eng. 2008, 56, 65–73. [Google Scholar] [CrossRef]
- Scheme, E.; Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use. J. Rehabil. Res. Dev. 2011, 48, 643–659. [Google Scholar] [CrossRef]
- Shi, K.; Huang, R.; Mu, F.; Peng, Z.; Yin, J.; Cheng, H. Channel Synergy-based Human-Robot Interface for a Lower Limb Walking Assistance Exoskeleton. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Electronic Network, Mexico, 1–5 November 2021; pp. 1076–1081. [Google Scholar]
- Wu, Y.; Hu, X.; Wang, Z.; Wen, J.; Kan, J.; Li, W. Exploration of Feature Extraction Methods and Dimension for sEMG Signal Classification. Appl. Sci. 2019, 9, 5343. [Google Scholar] [CrossRef]
- Olmo, M.D.; Domingo, R. EMG Characterization and Processing in Production Engineering. Materials 2020, 13, 5815. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Muscle | Motor Function |
|---|---|
| rectus femoris (RF) | stretch the calf, bend the thigh |
| vastus lateralis (VL) | stretch the calf |
| gastrocnemius (GA) | bend the calf, lift the heel, fix the knee, balance the body |
| musculus peroneus longus (ML) | foot valgus, plantarflexion |
| tibialis anterior (TA) | dorsiflexion, varus, adduction |
| biceps femoris (BF) | bend the calf, stretch the thigh, rotate the calf outward |
| soleus (SL) | bend the calf, lift the heel, fix the knee, balance the body |
| semitendinosus (SD) | stretch the thigh, bend the calf, rotate the thigh inside |
| Feature | Mathematical Definition |
|---|---|
| Mean Absolute Value (MAV) | |
| Variance (VAR) | |
| Root Mean Square (RMS) | |
| Zero Crossing (ZC) | |
| Median Frequency (MDF) | |
| Mean Power (MNP) |
| Feature | Mathematical Definition |
|---|---|
| Mean Absolute Value (MAV) | |
| Variance (VAR) | |
| Root Mean Square (RMS) | |
| Wilson Amplitude (WAMP) | |
| Zero Crossing (ZC) | |
| Waveform Length (WL) | |
| Median Frequency (MDF) | |
| Mean power (MNP) |
| Subject | Age | Height [cm] | SVM | KNN | DT | RF | Average Accuracy |
|---|---|---|---|---|---|---|---|
| S1 | 23 | 167 | 99.25% | 98.16% | 97.85% | 98.25% | 98.37% |
| S2 | 24 | 170 | 99.46% | 99.15% | 98.36% | 98.63% | 98.90% |
| S3 | 26 | 165 | 99.69% | 97.68% | 99.13% | 97.66% | 98.54% |
| S4 | 28 | 172 | 99.13% | 99.38% | 97.46% | 98.17% | 98.53% |
| S5 | 29 | 176 | 99.73% | 99.34% | 98.25% | 99.16% | 99.12% |
| S6 | 30 | 173 | 99.67% | 98.61% | 98.74% | 99.31% | 99.08% |
| Research | Sensor | Feature | Motion Pattern | Accuracy |
|---|---|---|---|---|
| Song [8] | EMG | 9 time-frequency features | 5 motion patterns | 97.5% |
| Peng [11] | Plantar pressure | 5 time-frequency features | 5 motion patterns | 91.1% |
| Dhindsa [13] | EMG | 15 time-frequency features | 2 motion patterns | 92.2% |
| Gupta [14] | Acceleration | 7 time-frequency features | 6 motion patterns | 95% |
| This work | EMG + IMU | Dual Stream CNN-ReliefF | 4 motion patterns | 99.12% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Liu, J.; Huang, Y.; Wang, D.; Miao, Y. Human Motion Pattern Recognition and Feature Extraction: An Approach Using Multi-Information Fusion. Micromachines 2022, 13, 1205. https://doi.org/10.3390/mi13081205
Li X, Liu J, Huang Y, Wang D, Miao Y. Human Motion Pattern Recognition and Feature Extraction: An Approach Using Multi-Information Fusion. Micromachines. 2022; 13(8):1205. https://doi.org/10.3390/mi13081205
Chicago/Turabian StyleLi, Xin, Jinkang Liu, Yijing Huang, Donghao Wang, and Yang Miao. 2022. "Human Motion Pattern Recognition and Feature Extraction: An Approach Using Multi-Information Fusion" Micromachines 13, no. 8: 1205. https://doi.org/10.3390/mi13081205
APA StyleLi, X., Liu, J., Huang, Y., Wang, D., & Miao, Y. (2022). Human Motion Pattern Recognition and Feature Extraction: An Approach Using Multi-Information Fusion. Micromachines, 13(8), 1205. https://doi.org/10.3390/mi13081205