
Dynamical Design and Gain Performance Analysis of a 3-DoF Micro-Gyro with an Anchored Leverage Mechanism


Abstract
:1. Introduction
2. Dynamics Analysis of a 3-DOF Micro-Gyro with an ALM
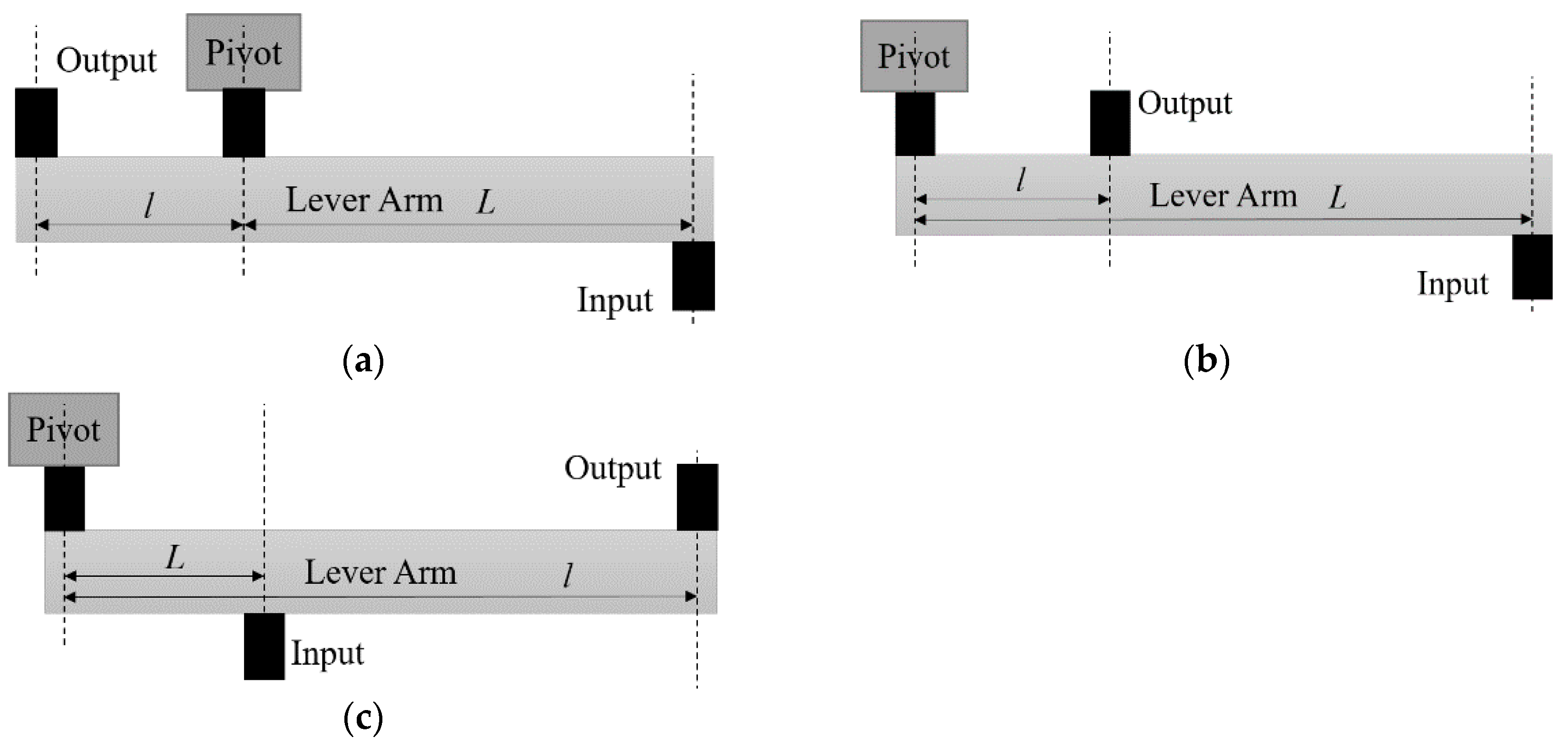
2.1. Classification of Levers
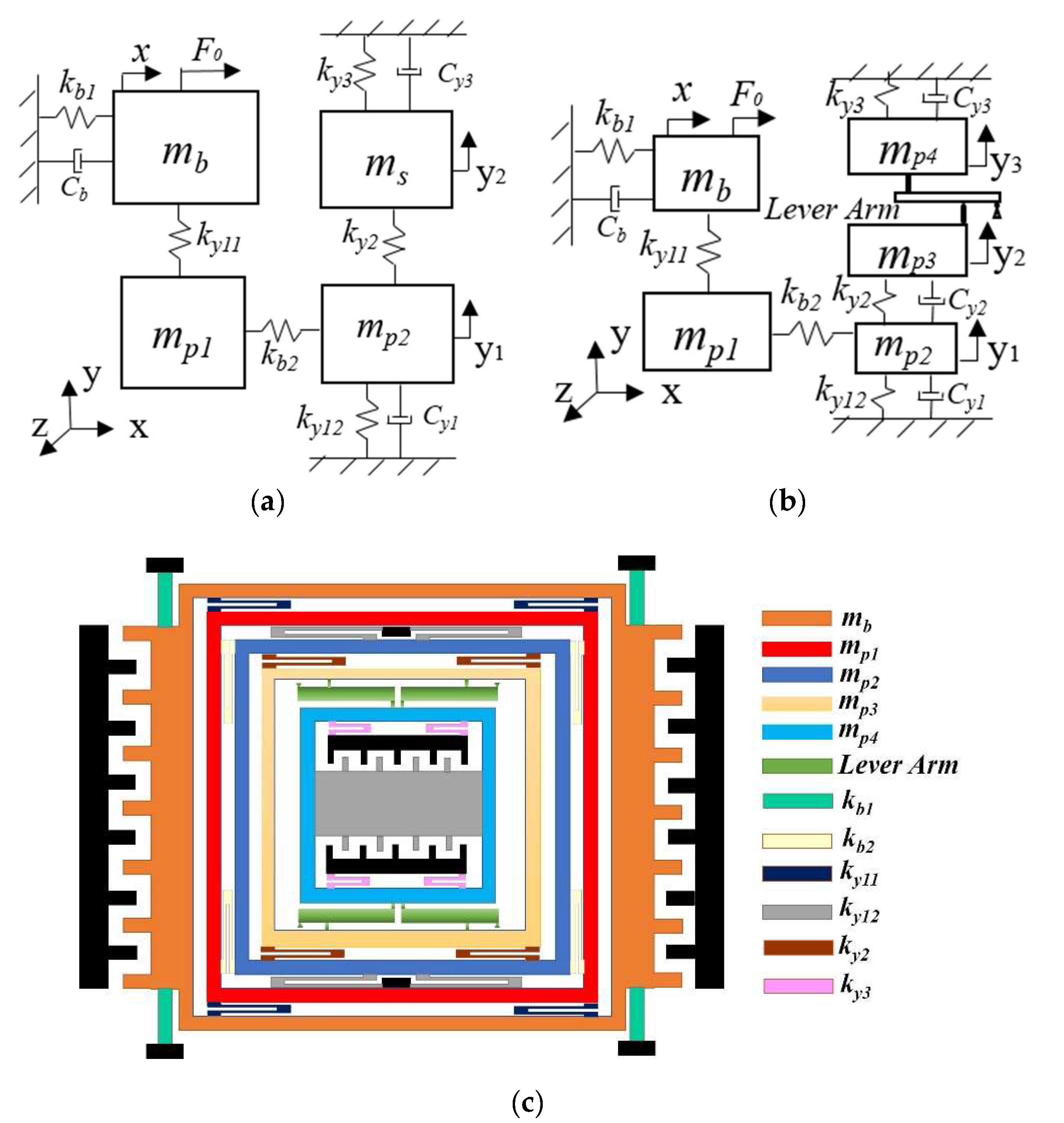
2.2. Structural Design of a 3-DOF Micro-Gyro with an ALM
2.3. Design of a Complete 2-DOF Sense System with an ALM
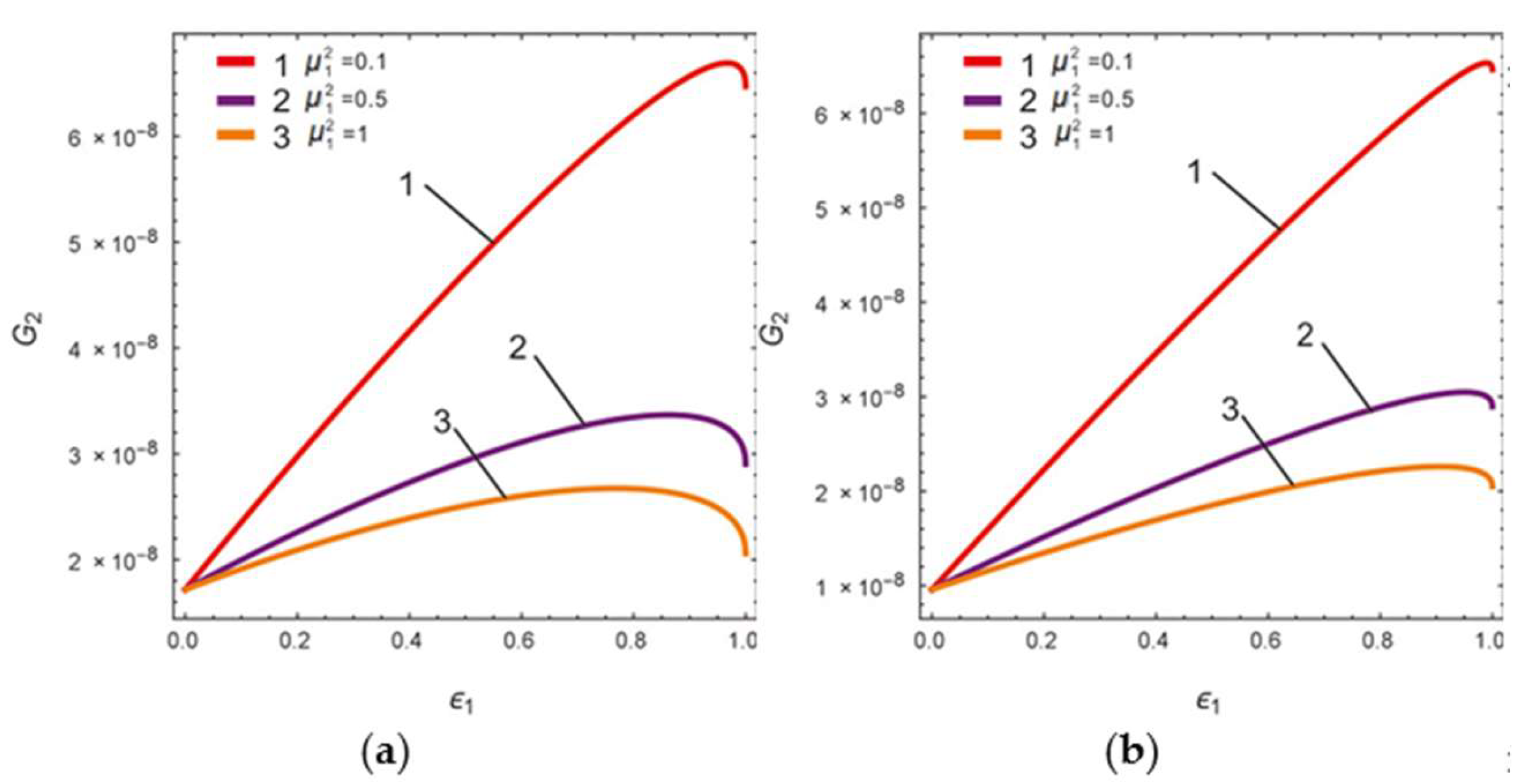
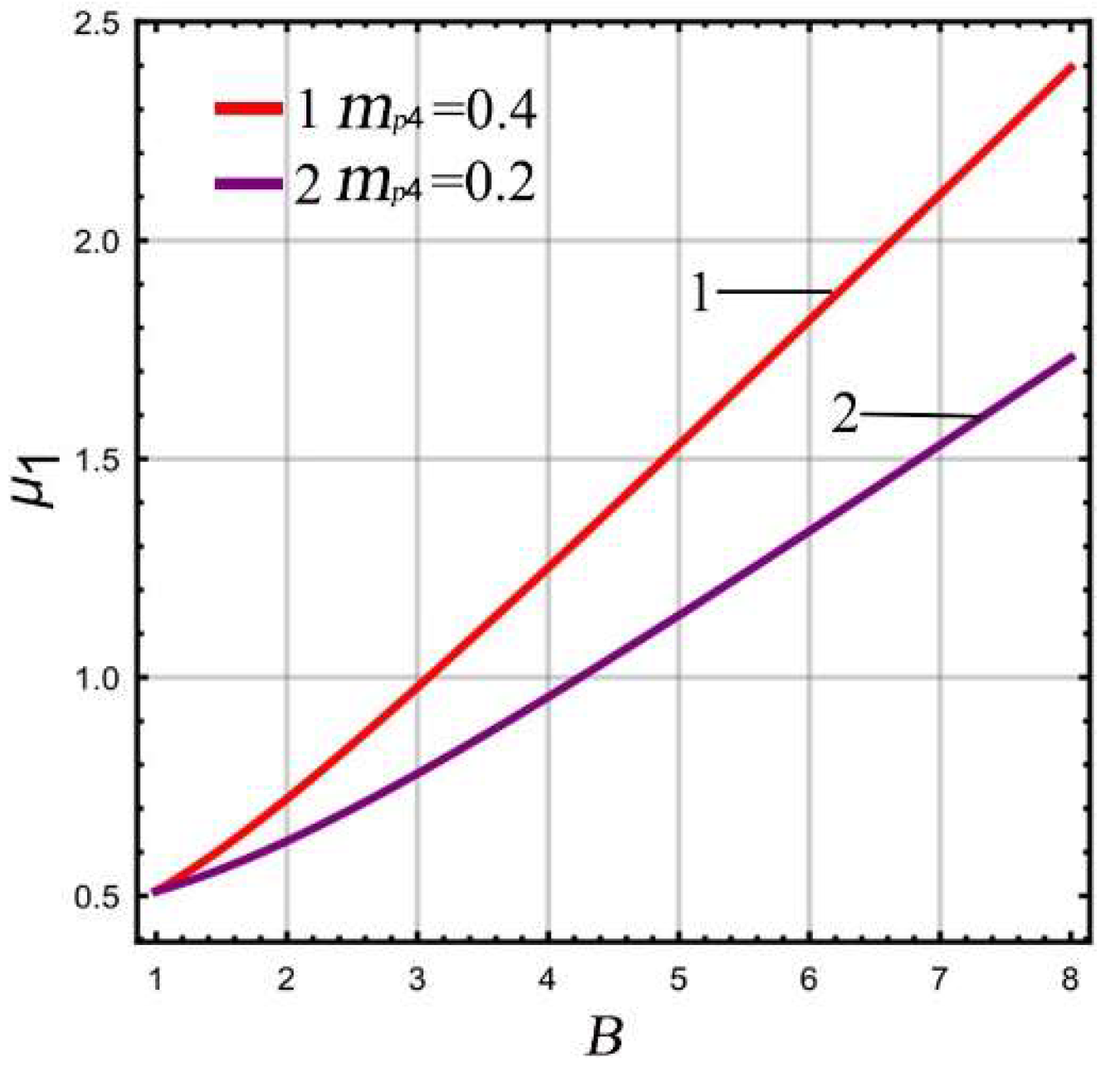
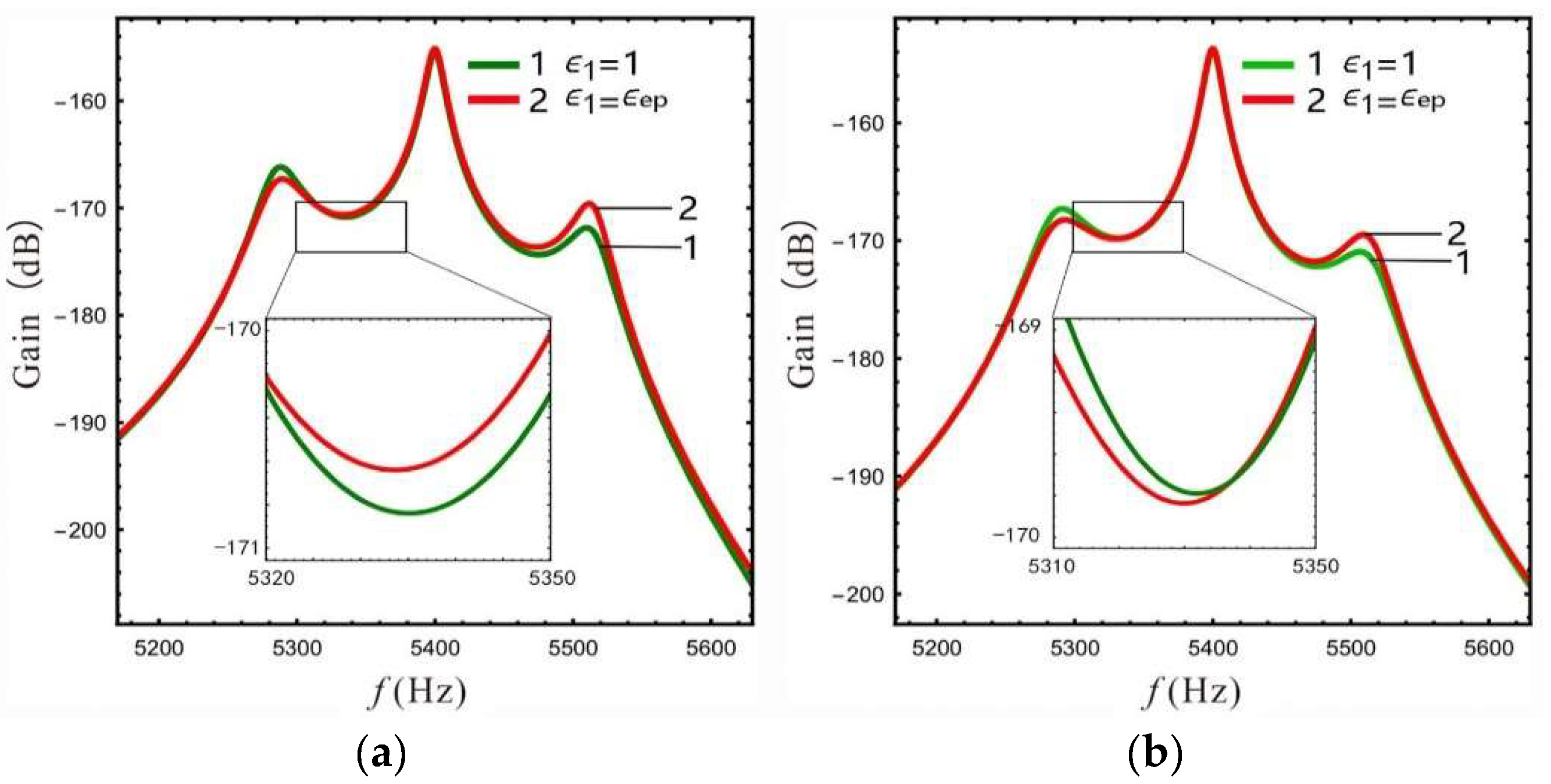
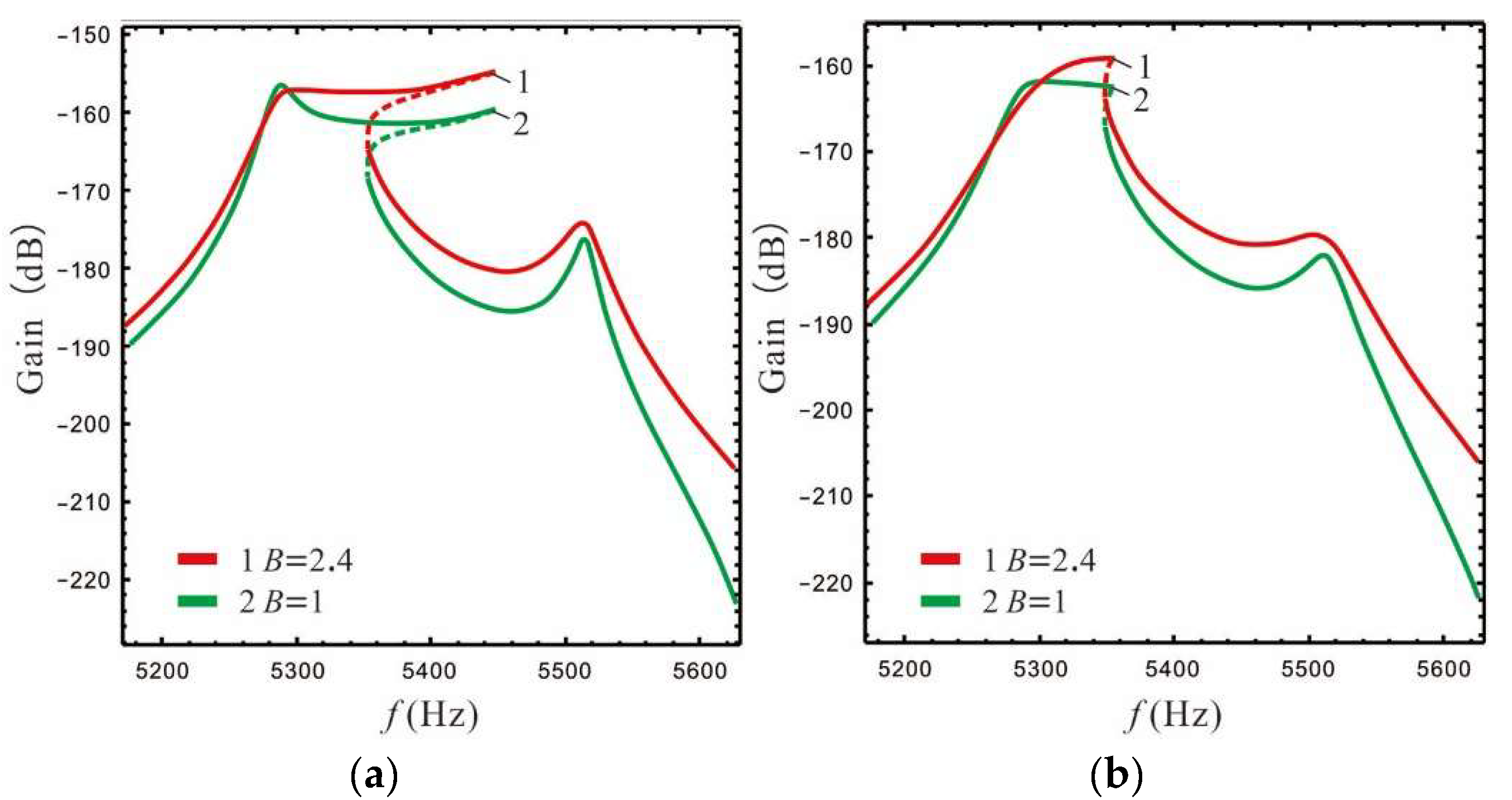
2.4. Effect of LR and FCP on the Gain of Peak
3. Gain Performance Analysis of a Micro-Gyro with an ALM
3.1. Analysis of the Linear Micro-Gyro
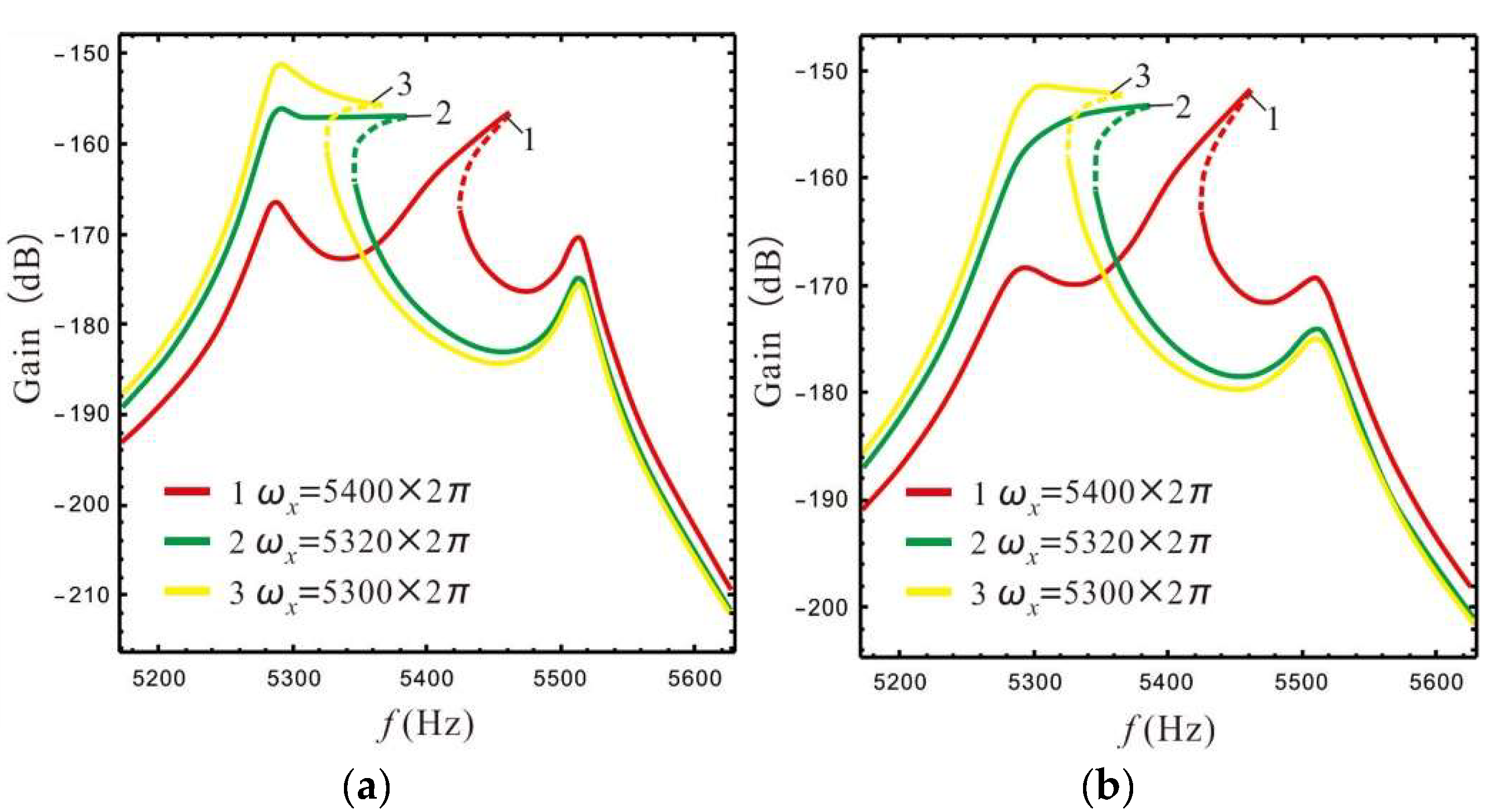
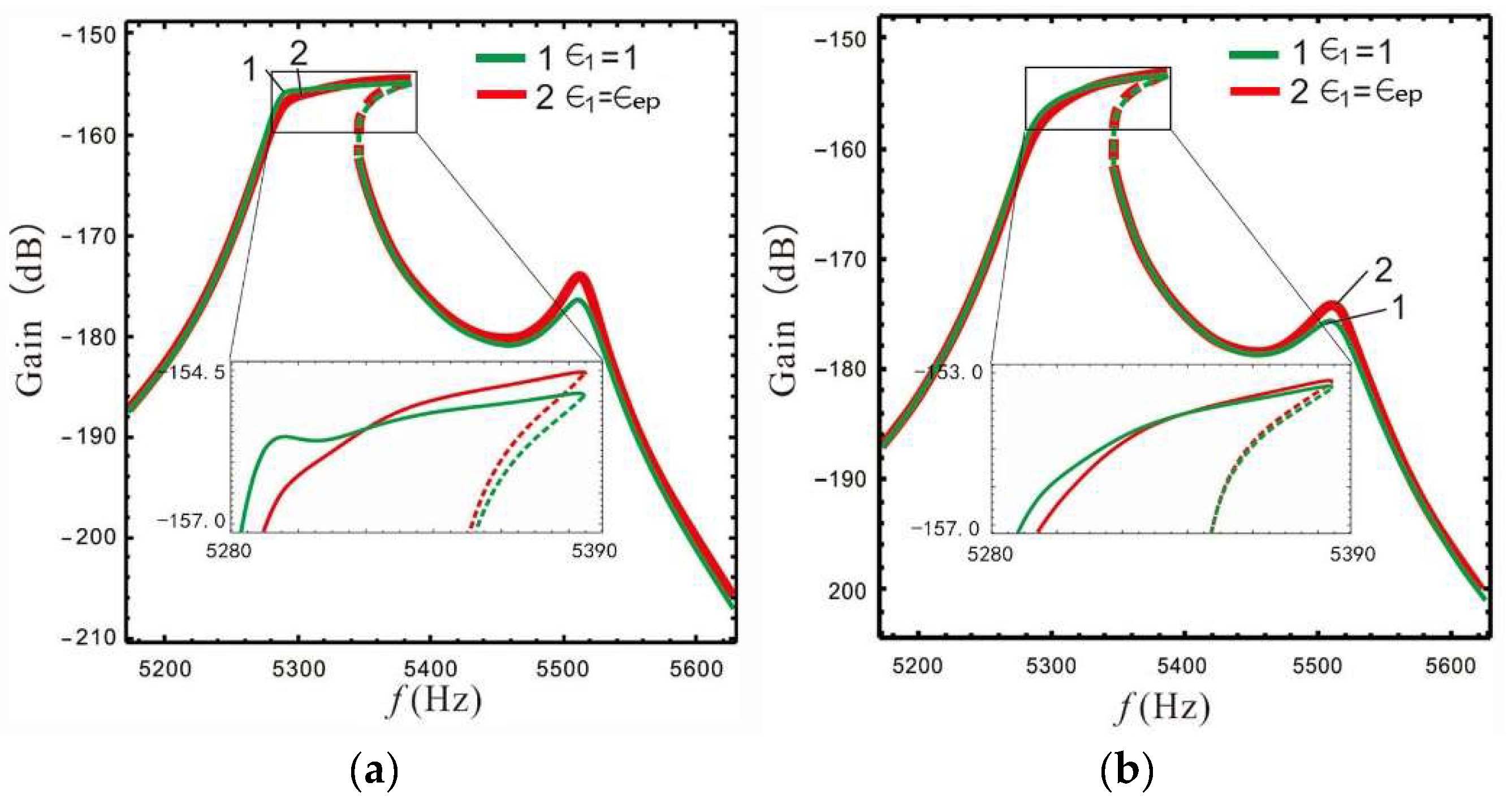
3.2. Analysis of the Nonlinear Micro-Gyro
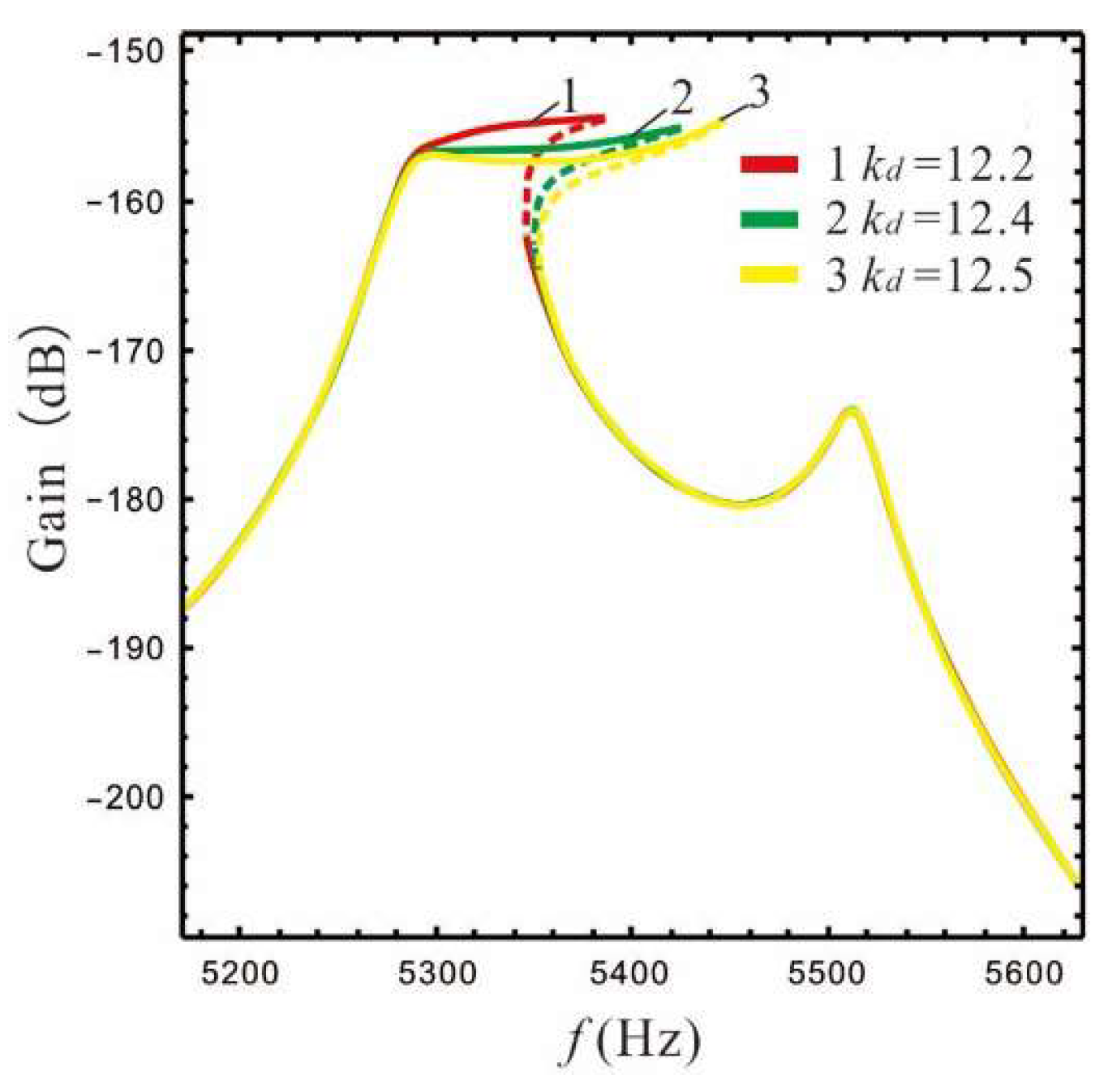
3.3. Effect of Nonlinear Stiffness and Damping Coefficient on Gain and Bandwidth
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Symbols
| t | Thickness of structural layer |
| mb | Mass of the drive frame |
| mp1 | Mass of the decoupling frame |
| mp2 | Mass of the sense frame |
| mp3 | Mass of the sense-II (Connecting lever input) |
| mp4 | Mass of the sense-II (Connecting lever output) |
| Ncomb | Number of comb fingers in drive direction, |
| Ncap | Number of comb fingers in sense direction |
| Icomb | Overlapping length of driving comb fingers |
| Icap | Overlapping length of sensing comb fingers |
| ycomb | Gap between the comb fingers in drive direction |
| ycap | Gap between the comb fingers in sense direction |
| F0 | Amplitude of the exciting force |
| Damping coefficient in drive direction | |
| Damping coefficient of mp1 and mp2 | |
| Damping coefficient of mp3 | |
| Damping coefficient of mp4 | |
| B | Leverage rate (LR) |
| Frequency coupling parameter (FCP) | |
| Extreme point of the Coriolis peak at the lever output of sense-II | |
| Mass ratio | |
| stiffness of beam in drive direction | |
| Nonlinear stiffness of beam in drive direction | |
| The amplitude of the drive mode | |
| φωξ | The phase of the drive mode |
| The resonant frequency of the drive mode | |
| The damping ratios of the drive mode | |
| The structural frequency of the sense system | |
| The resonant frequency of the sense mode | |
| Δ | The peak spacing |
| The parametric frequencies | |
| The stiffness of the beam in the sense direction | |
| Input angular velocity | |
| The displacements of masses mp2, mp3, and mp4 |
References
- Ren, X.X.; Zhou, X.; Yu, S.; Wu, X.; Xiao, D. Frequency-Modulated MEMS Gyroscopes: A Review. IEEE Sens. J. 2021, 23, 26426–26446. [Google Scholar] [CrossRef]
- Zaman, M.F.; Sharma, A.; Hao, Z.; Ayazi, F. A Mode-Matched Silicon-Yaw Tuning-Fork Gyroscope With Subdegree-Per-Hour Allan Deviation Bias Instability. J. Microelectromech. Syst. 2008, 17, 1526–1536. [Google Scholar] [CrossRef]
- Fan, Q.; Zhou, Y.; Liu, M.; Su, Y. A MEMS Rate-Integrating Gyroscope (RIG) With In-Run Automatic Mode-Matching. IEEE Sens. J. 2022, 22, 2282–2291. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, Z.; Ma, H.; Liang, S.; Feng, H.; Feng, C.; Jiao, H.; Feng, L. Resonant Fiber Optic Gyroscope With HOPLL Technique Based on Acousto-Optic Modulation. J. Lightwave Technol. 2022, 40, 1238–1244. [Google Scholar] [CrossRef]
- Mdc, A.; Fdl, A.; Ll, B.; Vmnp, A. Design of a resonator-bus-resonator anti-parity-time-symmetric integrated optical gyroscope. Opt. Lasers Eng. 2022, 153, 106983. [Google Scholar]
- Bukhari, S.A.R.; Saleem, M.M.; Khan, U.S.; Hamza, A.; Iqbal, J.; Shakoor, R.I. Microfabrication process-driven design, FEM analysis and system modeling of 3-DoF drive mode and 2-DoF sense mode thermally stable non-resonant MEMS gyroscope. Micromachines 2020, 11, 862. [Google Scholar] [CrossRef]
- Wang, W.; Lv, X.; Xu, D. Design of multi-degree-of-freedom micromachined vibratory gyroscope with double sense-modes. Measurement 2014, 58, 6–11. [Google Scholar] [CrossRef]
- Hao, S.; Zhu, Y.; Song, Y.; Zhang, Q.; Zhang, K. Critical parameters and influence on dynamic behaviours of nonlinear electrostatic force in a micromechanical vibrating gyroscope. Shock. Vib. 2020, 12, 1–15. [Google Scholar] [CrossRef]
- Han, M.; Zhang, Q.; Hao, S.; Li, W. Parametric characteristics and bifurcation analysis of multi-degree-of-freedom micro gyroscope with drive stiffness nonlinearity. Micromachines 2019, 10, 578. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lajimi, S.; Heppler, G.R.; Abdel-Rahman, E.M. A parametric study of the nonlinear dynamics and sensitivity of a beam-rigid body microgyroscope. Commun. Nonlinear Sci. Numer. Simul. 2017, 50, 180–192. [Google Scholar] [CrossRef]
- Li, W.; Yang, X.D.; Zhang, W.; Ren, Y. Parametric amplification performance analysis of a vibrating beam micro-gyroscope with size-dependent and fringing field effects. Appl. Math. Model. 2021, 91, 111–124. [Google Scholar] [CrossRef]
- Wang, S.; Lu, L.; Zhang, K.; Hao, S.; Zhang, Q.; Feng, J. Design, Dynamics, and Optimization of a 3-DoF Nonlinear Micro-Gyroscope by Considering the Influence of the Coriolis Force. Micromachines 2022, 13, 393. [Google Scholar] [CrossRef] [PubMed]
- Peng, S.; Liu, H.; Gao, S.; Jin, L.; Li, Z. Characteristic analysis of lever coupled micromechanical gyroscope. Piezoelectric Acoustooptic 2020, 42, 118–122. (In Chinese) [Google Scholar]
- Li, X.; Chang, H.; Jiao, W.; Xie, J.; Yuan, G. Structural design and Simulation of micromachined gyroscope based on lever. Micronanoelectron. Technol. 2012, 49, 311–317. (In Chinese) [Google Scholar]
- Li, Z.; Gao, S.; Jin, L.; Liu, H.; Peng, S. Design and mechanical sensitivity analysis of a mems tuning fork gyroscope with an anchored leverage mechanism. Sensors 2019, 19, 3455. [Google Scholar] [CrossRef] [Green Version]
- Apoorva, D.; Gargi, K. Numerical simulation and modelling of a novel MEMS capacitive accelerometer based microphone for fully implantable hearing aid. Microsyst. Technol. 2019, 25, 399–411. [Google Scholar]
- Ding, H.; Zhao, J.; Ju, B.F.; Xie, J. A new analytical model of single-stage microleverage mechanism in resonant accelerometer. Microsyst. Technol. 2016, 22, 757–766. [Google Scholar] [CrossRef]
- Wang, Y.; Ding, H.; Le, X.; Wang, W.; Xie, J. A mems piezoelectric in-plane resonant accelerometer based on aluminum nitride with two-stage microleverage mechanism. Sens. Actuators A Phys. 2017, 254, 126–133. [Google Scholar] [CrossRef]
- Ding, H.; Ma, Y.; Guan, Y.; Ju, B. Duplex mode tilt measurements based on a mems biaxial resonant accelerometer—sciencedirect. Sens. Actuators A Phys. 2019, 296, 222–234. [Google Scholar] [CrossRef]
- Xu, P.; Wei, Z.; Jia, L.; Zhao, Y.; Han, G.; Si, C.; Ning, J.; Yang, F. ZRO Drift Reduction of MEMS Gyroscopes via Internal and Package Stress Release. Micromachines 2021, 12, 1329. [Google Scholar] [CrossRef] [PubMed]
- Dw, A.; Hp, B.; Wei, X.C.; Jy, D.; Js, A.; Jke, F. Resonance characteristics of stochastic dual duffing oscillators with coupled aphc. J. Sound Vib. 2021, 28, 115981. [Google Scholar]
- Muhammad, S.; Muhammad, M.S.; Naveed, M.; Saif, U.A.; Umar, S.K. Design and analysis of a high-gain and robust multi-dof electro-thermally actuated mems gyroscope. Micromachines 2018, 9, 577. [Google Scholar]
- Hao, S.; Li, W.; Li, H.; Zhang, Q.; Feng, J.; Zhang, K. Influence of Nonlinear Electrostatic Force on Resonant Frequency and Sensitivity Stability of Dual Detection Micro-gyroscope. Vib. Shock. 2020, 39, 136–142. [Google Scholar]
- Nayfeh, A.H.; Mook, A.D. Nonlinear Oscillations; Wiley: Clarendon, TX, USA, 1981. [Google Scholar]
- Ding, H.; Wu, C.; Xie, J. A MEMS Resonant Accelerometer with High Relative Sensitivity Based on Sensing Scheme of Electrostatically Induced Stiffness Perturbation. J. Microelectromech. Syst. 2021, 30, 32–41. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| t | 80 µm | 16 × 10−6 µm | |
| mb | 2.85 × 10−7 Kg | 10 × 10−6 µm | |
| mp1 | 2.6 × 10−7 Kg | 4 × 10−6 µm | |
| mp2 | 2 × 10−7 Kg | 5.34 × 10−6 N | |
| mp3 | 1 × 10−7 Kg | 4.5 × 10−5 N·s/m | |
| mp4 | 0.2 × 10−7 Kg | 3.4 × 10−5 N·s/m | |
| Ncomb | 270 | 7.088 × 10−6 N·s/m | |
| Ncap | 500 | 1.07 × 10−5 N·s/m | |
| lcomb | 40 × 10−6 µm | 16 × 10−6 µm |
| Gain (dB) | Bandwidth (Hz) | Bandwidth Growth Rate (%) | ||
|---|---|---|---|---|
| B = 1 (without an ALM) | −174.2 | / | 64 | / |
| B = 1.4, = 1 | −173.2 | 12.5 | 67 | 4.7 |
| B = 1.4, = | −172.7 | 18.5 | 68 | 6.3 |
| B = 2.4, = 1 | −170.8 | 47.1 | 73 | 14.1 |
| B = 2.4, = | −170.6 | 50.9 | 98 | 53.1 |
| B = 4.4, = 1 | −169.7 | 66.0 | 94 | 46.9 |
| B = 4.4, = | −169.9 | 65.1 | 90 | 40.6 |
| Gain (dB) | (%) | Bandwidth (Hz) | Bandwidth Growth Rate (%) | |
|---|---|---|---|---|
| (without an ALM) | −159.5 | / | 106 | / |
| −158.7 | 9.6 | 108 | 1.9 | |
| −159.6 | −1.1 | 109 | 2.8 | |
| −158.3 | 14.8 | 105 | −0.9 | |
| −157.8 | 21.6 | 100 | −5.7 | |
| −156.7 | 38.0 | 89 | −16.0 | |
| −156.6 | 39.6 | 86 | −18.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.; Wang, S.; Hao, S.; Zhang, Q.; Feng, J. Dynamical Design and Gain Performance Analysis of a 3-DoF Micro-Gyro with an Anchored Leverage Mechanism. Micromachines 2022, 13, 1201. https://doi.org/10.3390/mi13081201
Zhang K, Wang S, Hao S, Zhang Q, Feng J. Dynamical Design and Gain Performance Analysis of a 3-DoF Micro-Gyro with an Anchored Leverage Mechanism. Micromachines. 2022; 13(8):1201. https://doi.org/10.3390/mi13081201
Chicago/Turabian StyleZhang, Kunpeng, Sai Wang, Shuying Hao, Qichang Zhang, and Jingjing Feng. 2022. "Dynamical Design and Gain Performance Analysis of a 3-DoF Micro-Gyro with an Anchored Leverage Mechanism" Micromachines 13, no. 8: 1201. https://doi.org/10.3390/mi13081201
APA StyleZhang, K., Wang, S., Hao, S., Zhang, Q., & Feng, J. (2022). Dynamical Design and Gain Performance Analysis of a 3-DoF Micro-Gyro with an Anchored Leverage Mechanism. Micromachines, 13(8), 1201. https://doi.org/10.3390/mi13081201