
Position Detection Method of Piezoelectric Driven Spherical Motor Based on Laser Detection



Abstract
:1. Introduction
2. Principle of Speed Measurement and Method of Position Detection
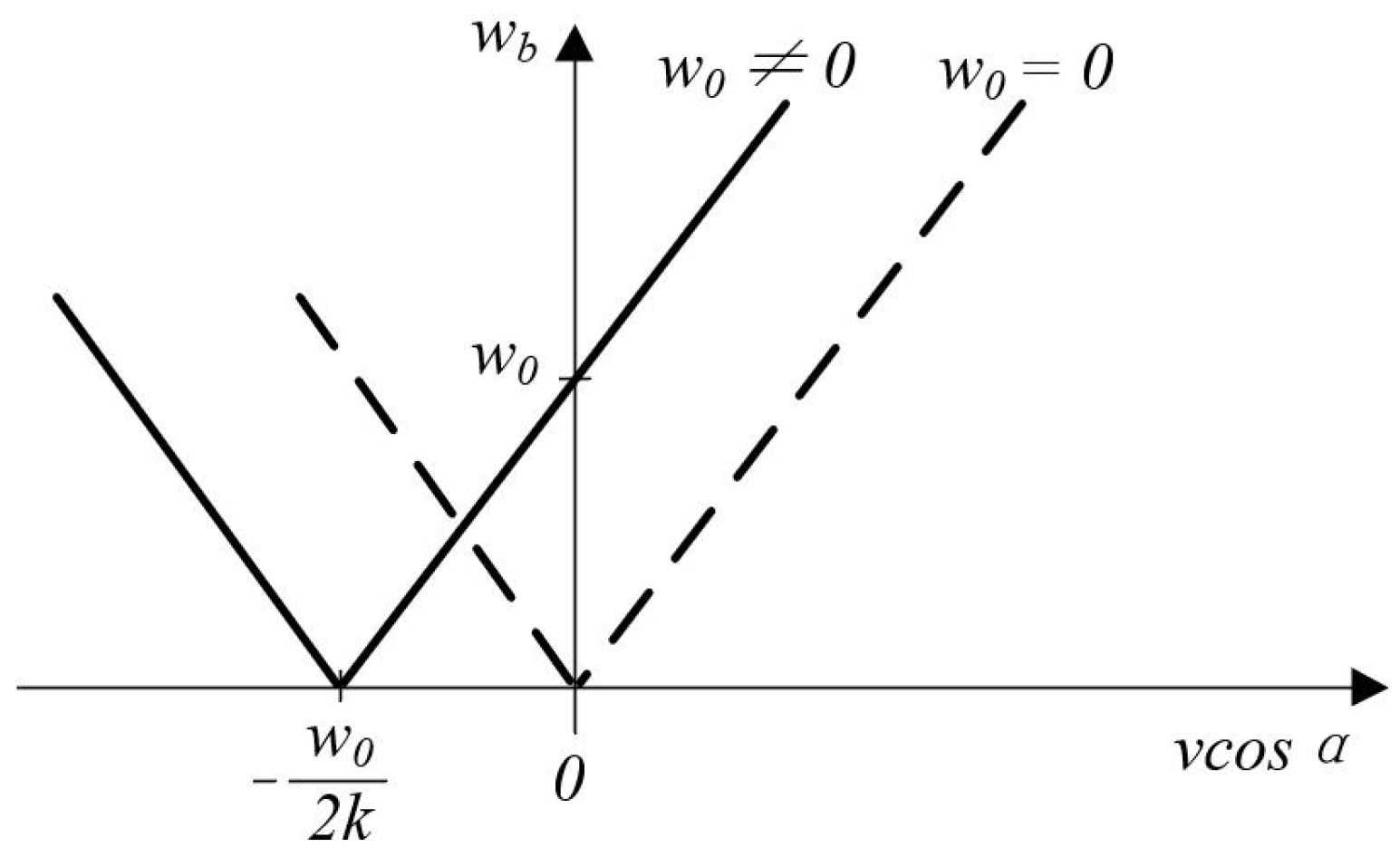
2.1. Laser Speed Measurement Principle
2.2. Determine the Rotor Position Principle
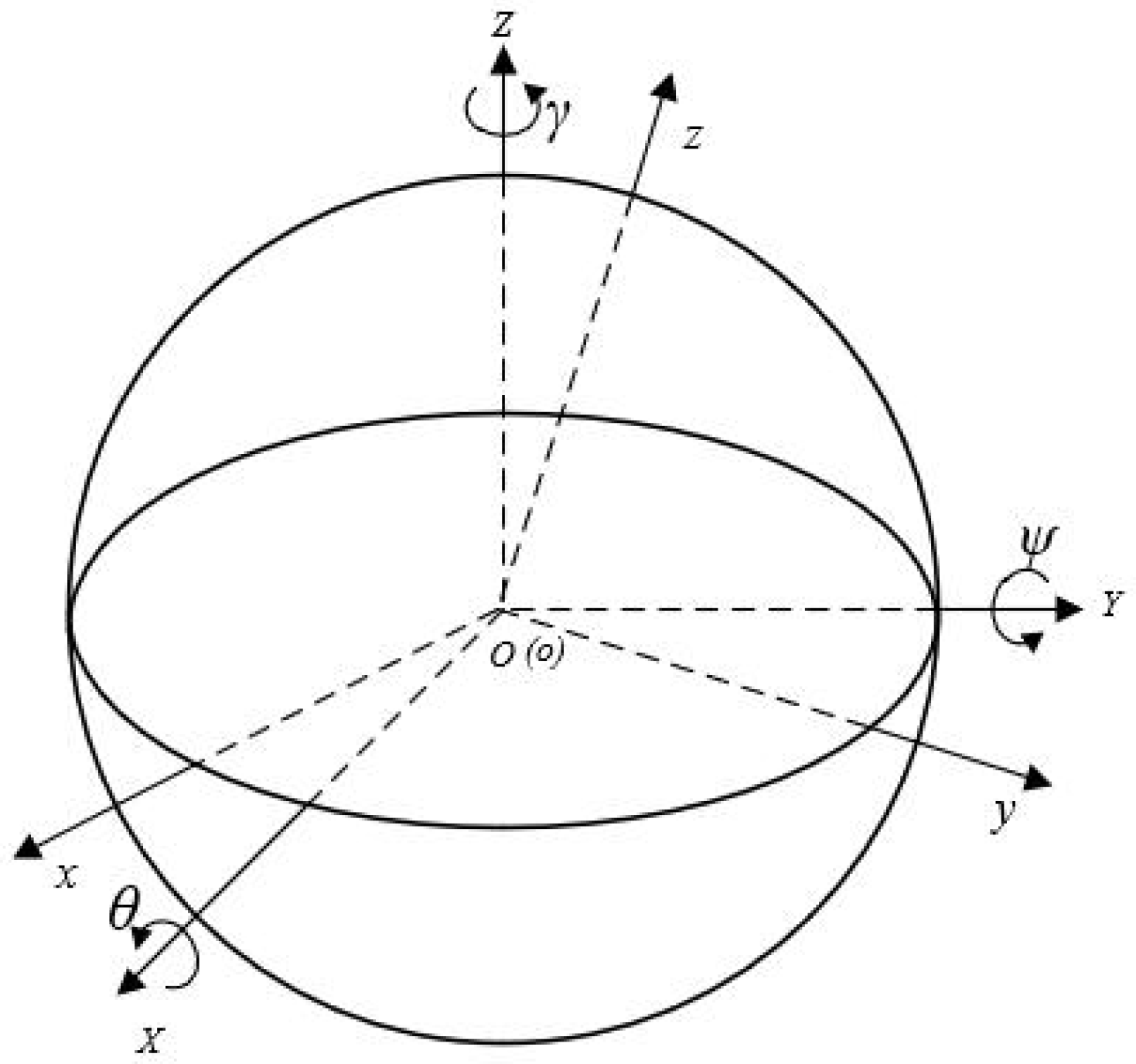
- Roll angle θ: the angle between the y-axis of the dynamic coordinate system O-xyz and the XOY plane of the reference coordinate system O-XYZ, positive when the y-axis is above the XOY plane, negative when the opposite is true;
- Pitch angle ψ: the angle between the x-axis of the dynamic coordinate system o-xyz and the XOY plane of the reference coordinate system O-XYZ, when the x-axis is located above the XOY plane takes positive, and vice versa takes negative;
- Yaw angle γ: the angle between the x-axis of the dynamic coordinate system o-xyz and the XOZ plane of the reference coordinate system O-XYZ, positive when the x-axis is on the right side of the XOZ plane, negative when the opposite is true.
3. Experiment and Error Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rashid, M.K.; Khalil, Z.A. Configuration Design and Intelligent Stepping of a Spherical Motor in Robotic Joint. J. Intell. Robot Syst. 2004, 40, 165–181. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Q.J. Research and development status of permanent magnet multidimensional spherical motor. Small Spec. Electr. Mach. 2006, 10, 7–11. [Google Scholar]
- Li, B.; Liu, C.; Li, H.F.; Li, G.D. Permanent magnet model and magnetic field analysis of stator winding of permanent magnet spherical motor. Trans. Tianjin Univ. 2012, 45, 1024–1029. [Google Scholar]
- Li, Z.; Yang, K.; Wang, X. Characteristics Analysis of PM Multi-DOF Motor with Air Bearing Structure. In Proceedings of the 2020 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Tianjin, China, 16–18 October 2020. [Google Scholar]
- Zhou, H.; Fang, Y.; Ma, J. Structural Design and FEA of a New Type of Multi-DOF Spherical Induction Motor without Output Shaft. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar]
- Wang, Q.J.; Qiao, Y.Z.; Ju, L.F.; Zhou, R.; He, J.X. Structural design of a convex pole reluctance spherical motor. Electr. Mach. Control 2021, 25, 90–102. [Google Scholar]
- Li, Z.; Wang, Z.; Guo, P.; Zhao, L.; Wang, Q.J. A Ball-type Multi-DOF Ultrasonic Motor with Three Embedded Traveling Wave Stators. Sens. Actuators A Phys. 2020, 313, 112161. [Google Scholar] [CrossRef]
- Guo, J.J.; Kim, H.D.; Son, H.S. Effects of Magnetic Pole Design on Orientation Torque for a Spherical Motor. IEEE/ASME Trans. Mech. 2013, 18, 1420–1425. [Google Scholar]
- Yo, S.; Katsuhiro, H.; Shu, M.; Noboru, N. Feedback Control of the 2-DOF Actuator Specialized for 2-Axes Rotation. IEEE Trans. Magn. 2013, 49, 2245–2248. [Google Scholar]
- Zhang, L.; Chen, W.H.; Liu, J.M.; Wen, C.Y. A Robust Adaptive Iterative Learning Control for Trajectory Tracking of Permanent-Magnet Spherical Actuator. IEEE Trans. Ind. Electron. 2015, 63, 291–301. [Google Scholar] [CrossRef]
- Lu, Y.; Hong, Y.; Wang, Q.J.; Rong, Y.P. Research on rotor position detection method of permanent magnet spherical Motor based on MEMS. Electr. Mach. Control 2019, 87, 87–95, 104. [Google Scholar]
- Rong, Y.P.; Wang, Q.J.; Si, L.; Guo, L.; Yin, J.Z. Improving attitude detection performance for spherical motors using a MEMS inertial measurement sensor. IET Electr. Power Appl. 2019, 13, 198–205. [Google Scholar] [CrossRef]
- Lee, K.M.; Zhou, D. A real-time optical sensor for simultaneous measurement of three-DOF motions. IEEE/ASME Trans. Mechatron. 2004, 9, 499–507. [Google Scholar]
- Wang, Q.J.; Qian, Z.; Li, Z.; Ni, Y.Y.; Ju, L.F. Rotor position detection method of permanent magnet spherical stepping motor based on machine vision. Proc. CSEE 2008, 28, 73–79. [Google Scholar]
- Wang, X.L.; Liu, S.H.; Gu, C. Error compensation of Linear Hall Rotor position detection for high speed PERMANENT magnet synchronous motor. Electr. Mach. Control 2021, 23. [Google Scholar]
- Pan, S.; Commins, P.A.; Du, H. Tubular linear motor position detection by hall-effect sensors. In Proceedings of the 2015 Australasian Universities Power Engineering Conference (AUPEC), Wollongong, NSW, Australia, 27–30 September 2015. [Google Scholar]
- Ma, S.; Li, G.; Wang, Q.; Qian, Z. Research on position detection of spherical motor based on magnetic field measurement. In Proceedings of the 2015 18th International Conference on Electrical Machines and Systems (ICEMS), Pattaya, Thailand, 25–28 October 2015. [Google Scholar]
- Tzu, F.-M.; Hsu, S.-H.; Chen, J.-S. Non-Contact Optical Detection of Foreign Materials Adhered to Color Filter and Thin-Film Transistor. Micromachines 2022, 13, 101. [Google Scholar] [CrossRef]
- Kemal, O.M. Comparative study of attitude control methods based on Euler angles, quaternions, angle–axis pairs and orientation matrices. Trans. Inst. Meas. Control 2018, 41, 1189–1206. [Google Scholar]
- Zheng, J.; Xu, L.; Zeng, F.C. Description of Rotor’s Position of Magnetic Suspension Spherical Reluctance Motor and Detection Research. Appl. Mech. Mater. 2012, 1867, 184–185. [Google Scholar]
- Li, Z.; Zhao, H.; Che, S.; Chen, X.; Sun, H. Analysis of Preload of Three-Stator Ultrasonic Motor. Micromachines 2022, 13, 5. [Google Scholar] [CrossRef]
- Yan, C.R.; Li, S.M.; Li, Q.Q.; Li, G.L. Research on position detection method of spherical motor based on SAW Sensor. J. Jiamusi Univ. 2019, 37, 187, 189–201. [Google Scholar]
- Xu, J.Z.; Wang, Q.J.; Guo, L.; Zhou, R.; Wen, Y.; Ju, L.F.; Zhou, S.L. Sensorless Posture Detection of Reluctance Spherical Motor Based on Mutual Inductance Voltage. Appl. Sci. 2021, 11, 3515. [Google Scholar] [CrossRef]
- Yang, H.Y.; Kim, J.G.; Lim, Y.C.; Jeong, S.K.; Jung, Y.G. Position detection and drive of a toroidal switched reluctance motor (TSRM) using search coils. IEE Proc.-Electr. Power Appl. 2004, 151, 377–384. [Google Scholar] [CrossRef]
- Kim, T.; Lee, H.W.; Ehsani, M. Position sensorless brushless DC motor/generator drives: Review and future trends. IET Electr. Power Appl. 2007, 1, 557–564. [Google Scholar] [CrossRef]
- Chang, Y.-H.; Liu, T.-H.; Wu, C.-C. Novel adjustable micropermanent-magnet synchronous-motor control system without using a rotor-position/speed sensor. IET Electr. Power Appl. 2006, 154, 429–438. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Frequency/Hz | X-Axis Speed/(r/min) | Y-Axis Speed/(r/min) | Z-Axis Speed/(r/min) |
|---|---|---|---|
| 42,250 | 30 | 16 | 16 |
| 42,750 | 22 | 13 | 12 |
| 43,250 | 14 | 7 | 7 |
| 43,750 | 9 | 5 | 5 |
| 44,250 | 4 | 2 | 2 |
| 44,750 | 3 | 3 | 2 |
| 45,500 | 3 | 2 | 2 |
| Motor Speed/(mm/s) | Frequency Deviation/MHz | Average Measurement Value/(mm/s) | Error |
|---|---|---|---|
| 150 | 0.440 | 146.667 | 2.22% |
| 140 | 0.429 | 143.000 | 2.14% |
| 130 | 0.400 | 133.333 | 2.56% |
| 120 | 0.364 | 121.333 | 1.11% |
| 110 | 0.334 | 111.333 | 1.21% |
| 100 | 0.302 | 100.667 | 0.67% |
| 90 | 0.274 | 91.333 | 1.48% |
| 80 | 0.242 | 80.667 | 0.83% |
| 70 | 0.207 | 69.000 | 1.43% |
| 60 | 0.178 | 59.333 | 1.11% |
| 50 | 0.149 | 49.667 | 0.67% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zhu, Y.; Xie, B.; Wang, Y.; Guo, X.; Sun, H. Position Detection Method of Piezoelectric Driven Spherical Motor Based on Laser Detection. Micromachines 2022, 13, 662. https://doi.org/10.3390/mi13050662
Li Z, Zhu Y, Xie B, Wang Y, Guo X, Sun H. Position Detection Method of Piezoelectric Driven Spherical Motor Based on Laser Detection. Micromachines. 2022; 13(5):662. https://doi.org/10.3390/mi13050662
Chicago/Turabian StyleLi, Zheng, Yiding Zhu, Bo Xie, Ye Wang, Xiaoqiang Guo, and Hexu Sun. 2022. "Position Detection Method of Piezoelectric Driven Spherical Motor Based on Laser Detection" Micromachines 13, no. 5: 662. https://doi.org/10.3390/mi13050662
APA StyleLi, Z., Zhu, Y., Xie, B., Wang, Y., Guo, X., & Sun, H. (2022). Position Detection Method of Piezoelectric Driven Spherical Motor Based on Laser Detection. Micromachines, 13(5), 662. https://doi.org/10.3390/mi13050662