
Enhancing the Recognition Task Performance of MEMS Resonator-Based Reservoir Computing System via Nonlinearity Tuning


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
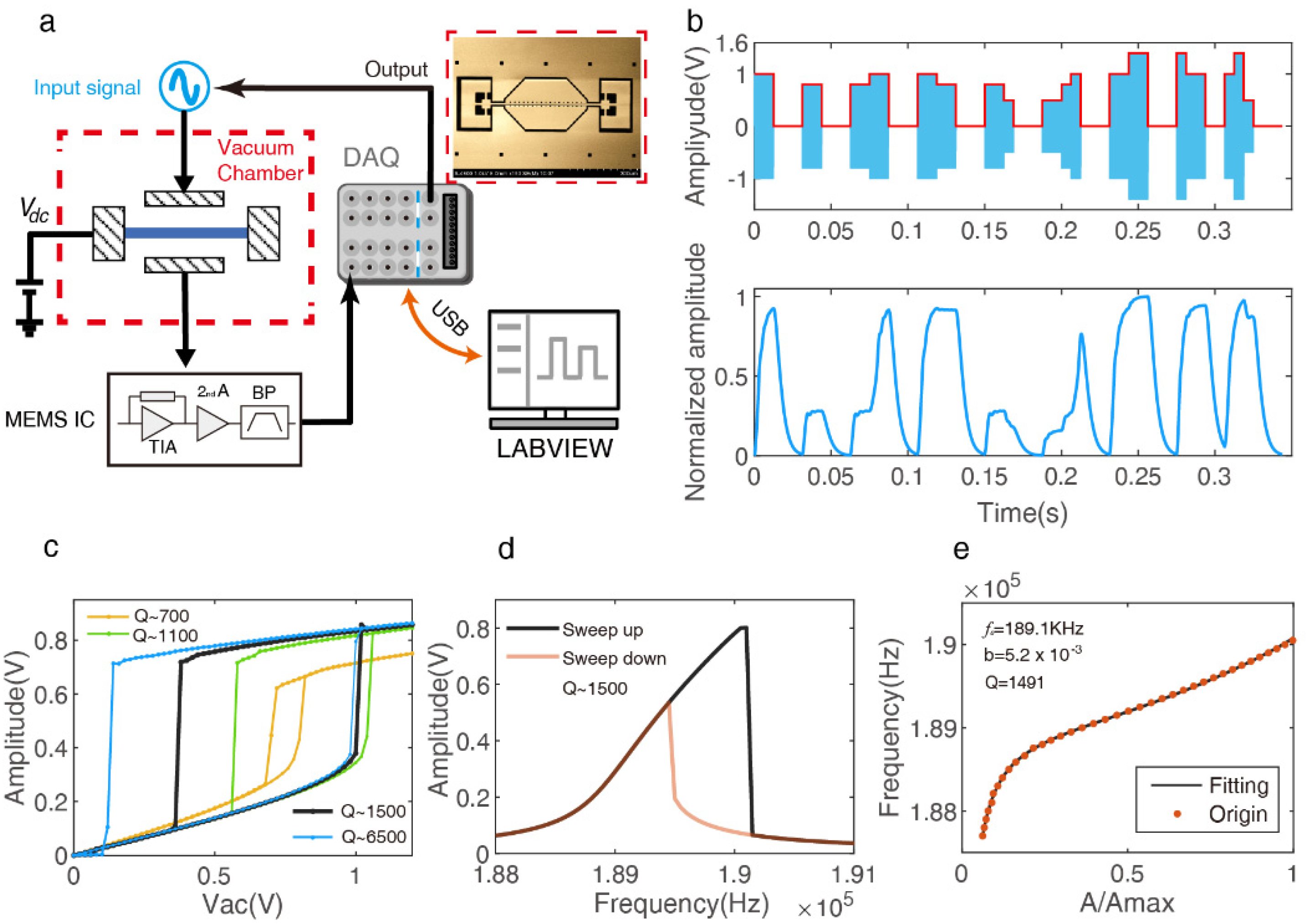
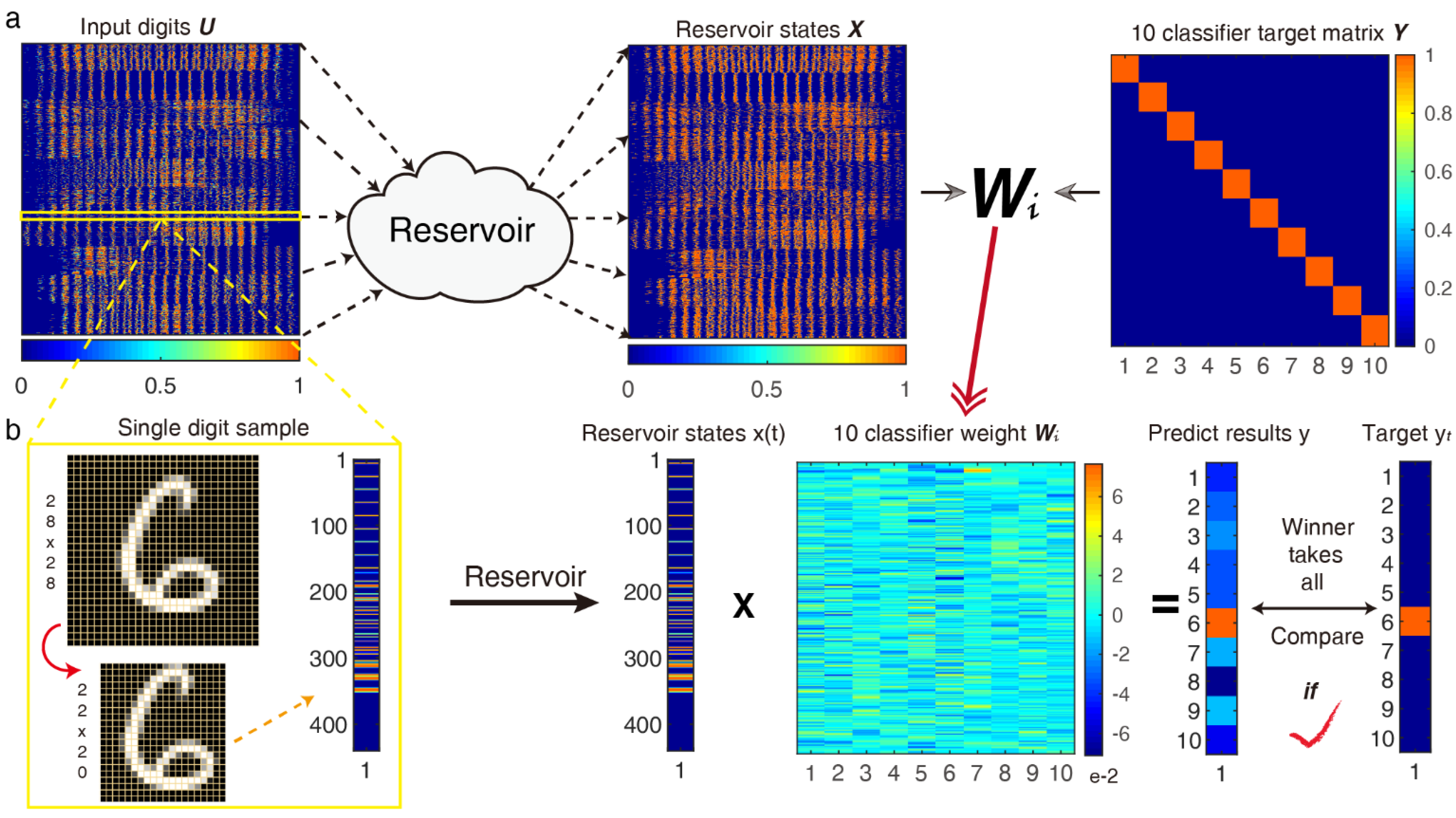
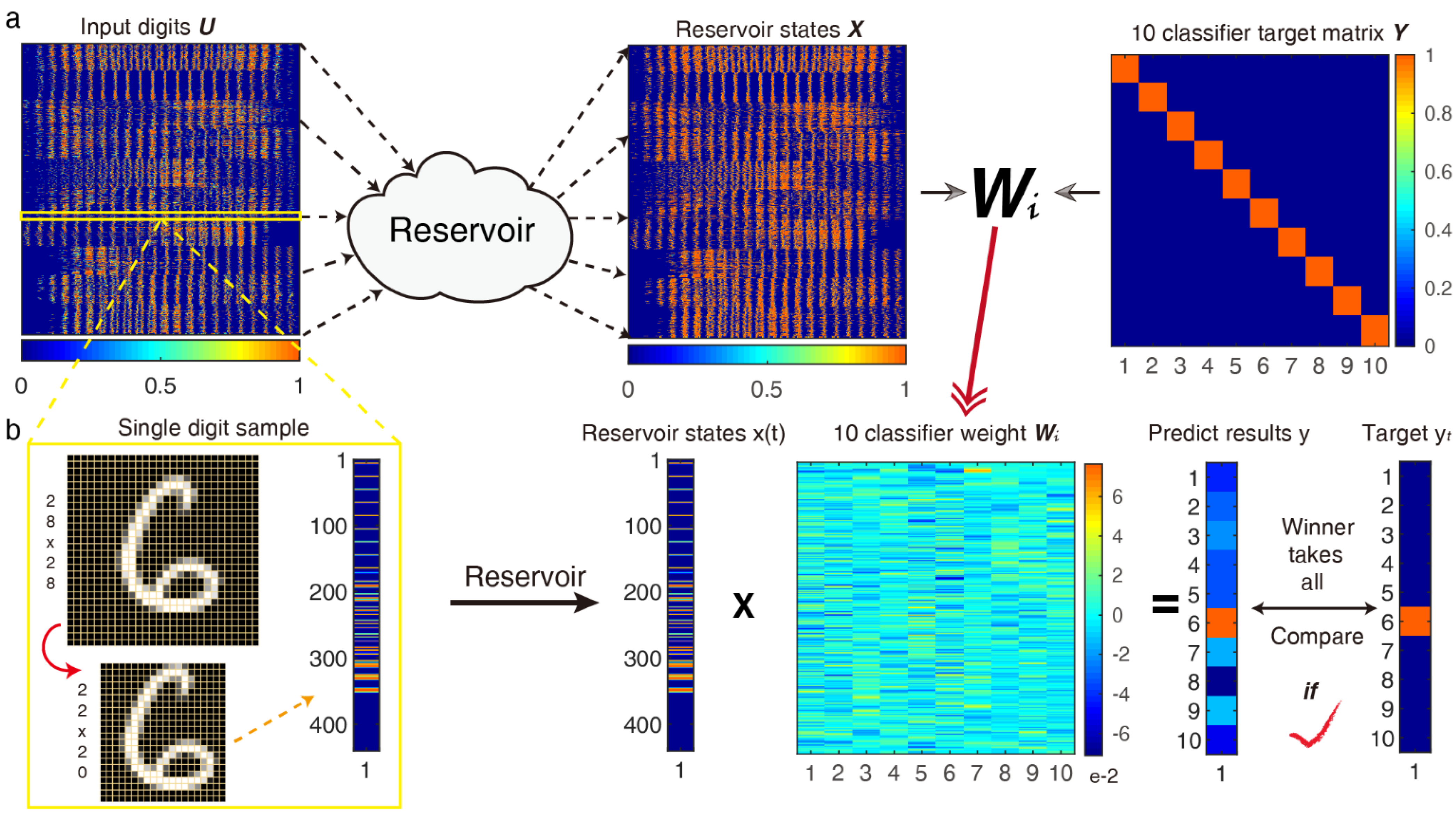
2. Hardware RC Implementation
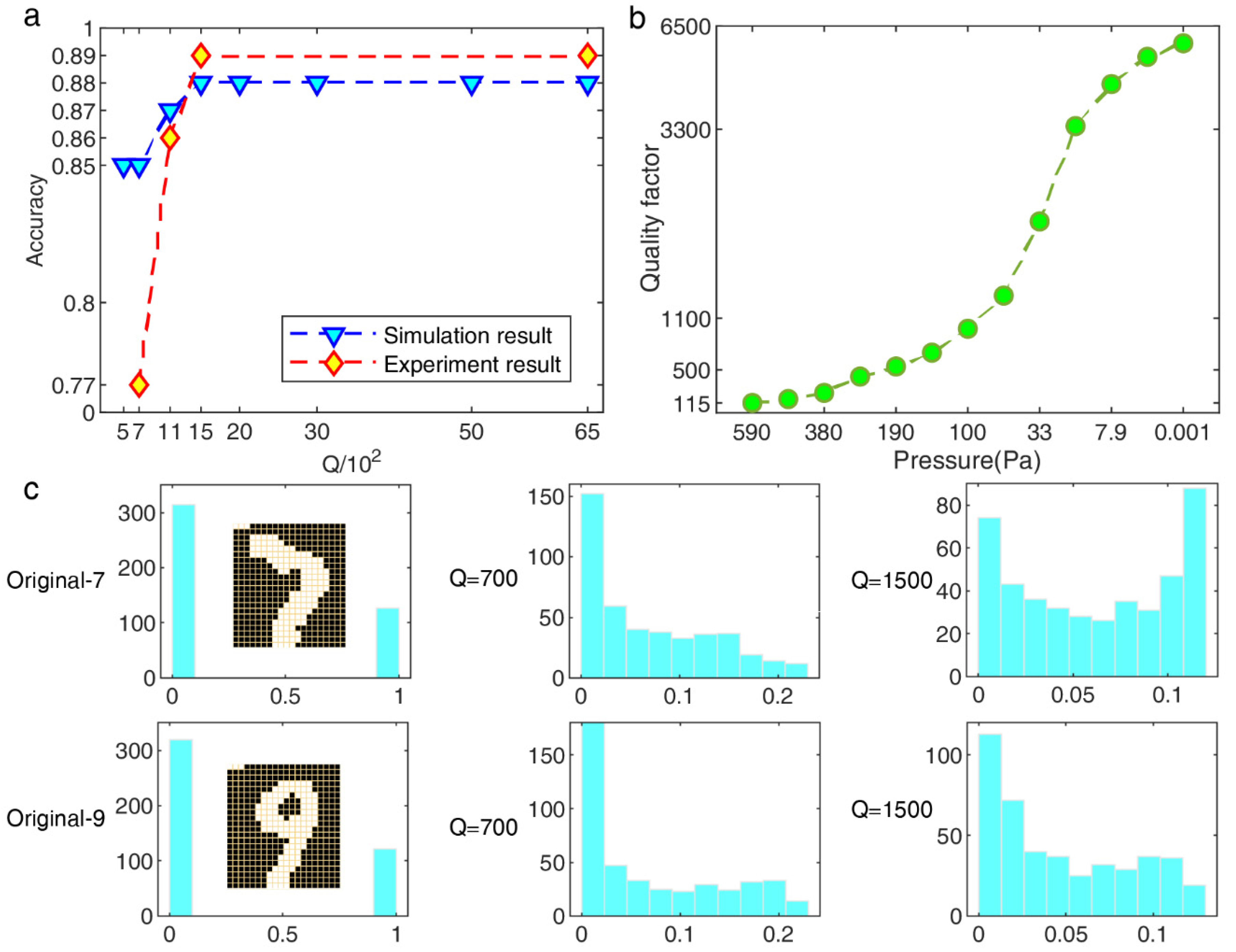
3. Transient Nonlinearity Tuning
3.1. Q Value Fitting Model
3.2. Experimental Analysis
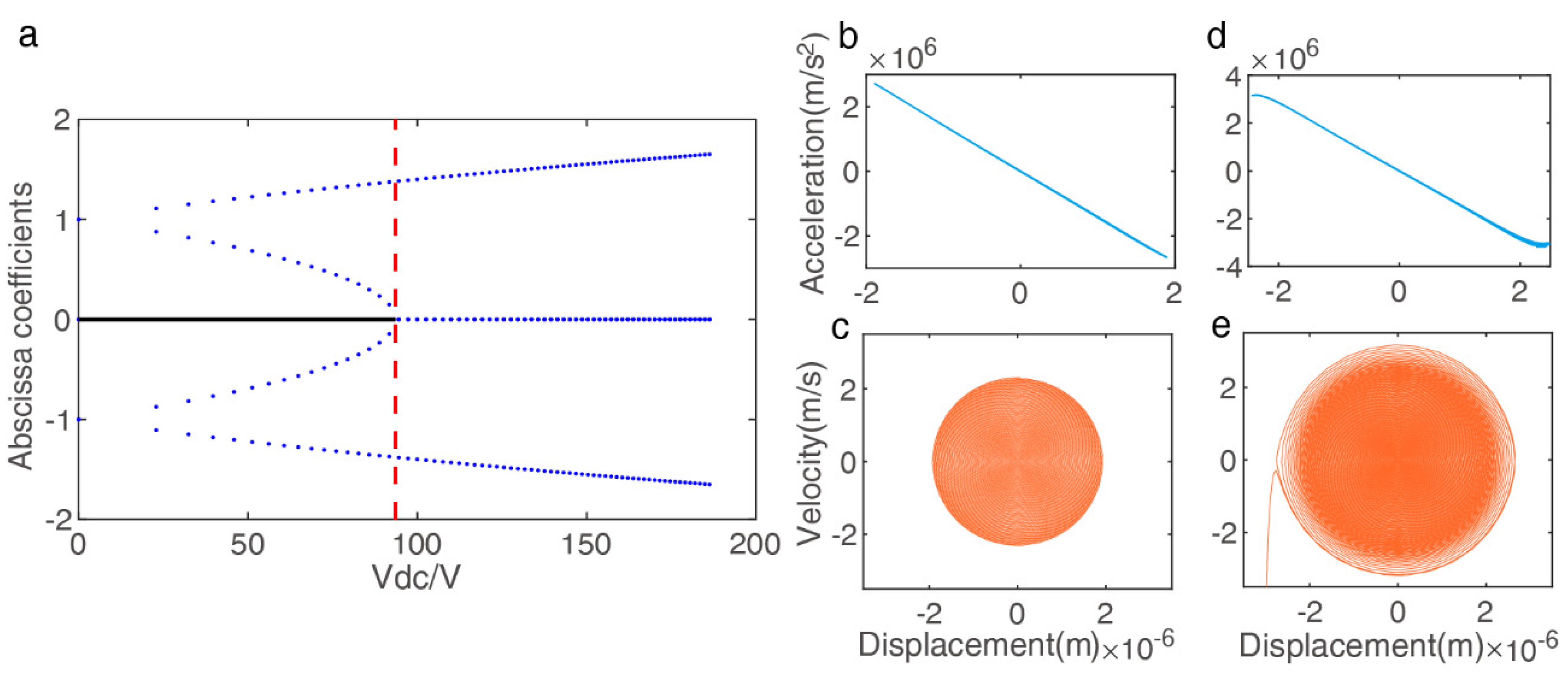
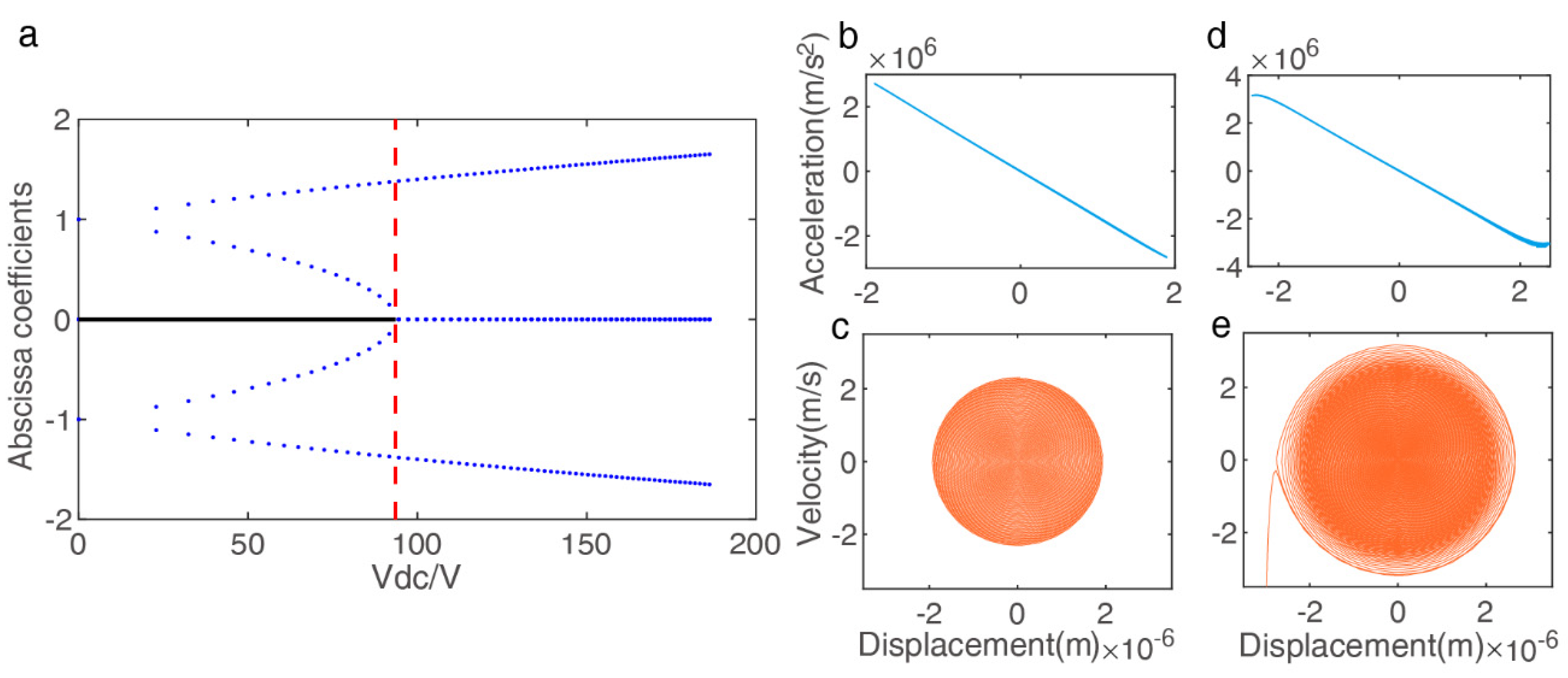
4. Duffing Nonlinearity Tuning
4.1. Experimental Analysis
4.2. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xin, Y. Evolving artificial neural networks. Proc. IEEE 1999, 87, 1423–1447. [Google Scholar] [CrossRef] [Green Version]
- Graves, A. Generating sequences with recurrent neural networks. arXiv 2013, arXiv:1308.0850. [Google Scholar]
- Sutskever, I.; Martens, J.; Hinton, G.E. Generating text with recurrent neural networks. In Proceedings of the 28th International Conference on Machine Learning (ICML), Bellevue, WA, USA, 28 June–2 July 2011. [Google Scholar]
- Atiya, A.F.; Parlos, A.G. New results on recurrent network training: Unifying the algorithms and accelerating convergence. IEEE Trans. Neural Netw. 2000, 11, 697–709. [Google Scholar] [CrossRef] [Green Version]
- Verstraeten, D.; Schrauwen, B.; D’Haene, M.; Stroobandt, D. An experimental unification of reservoir computing methods. Neural Netw. 2007, 20, 391–403. [Google Scholar] [CrossRef]
- Jaeger, H. Adaptive nonlinear system identification with echo state networks. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2003; pp. 609–616, (NIPS’02). [Google Scholar]
- Jaeger, H. The “echo state” approach to analysing and training recurrent neural networks-with an erratum note. Ger. Natl. Res. Cent. Inf. Technol. GMD Tech. Rep. 2001, 148, 13. [Google Scholar]
- Maass, W.; Natschläger, T.; Markram, H. Real-time computing without stable states: A new framework for neural computation based on perturbations. Neural Comput. 2002, 14, 2531–2560. [Google Scholar] [CrossRef] [PubMed]
- Appeltant, L.; Soriano, M.C.; Van der Sande, G.; Danckaert, J.; Massar, S.; Dambre, J.; Schrauwen, B.; Mirasso, C.R.; Fischer, I. Information processing using a single dynamical node as complex system. Nat. Commun. 2011, 2, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Appeltant, L.; Van der Sande, G.; Danckaert, J.; Fischer, I. Constructing optimized binary masks for reservoir computing with delay systems. Sci. Rep. 2014, 4, 3629. [Google Scholar] [CrossRef]
- Paquot, Y.; Duport, F.; Smerieri, A.; Dambre, J.; Schrauwen, B.; Haelterman, M.; Massar, S. Optoelectronic Reservoir Computing. Sci. Rep. 2012, 2, 287. [Google Scholar] [CrossRef]
- Larger, L.; Soriano, M.C.; Brunner, D.; Appeltant, L.; Gutiérrez, J.M.; Pesquera, L.; Mirasso, C.R.; Fischer, I. Photonic information processing beyond Turing: An optoelectronic implementation of reservoir computing. Opt. Express 2012, 20, 3241–3249. [Google Scholar] [CrossRef]
- Chen, Y.; Yi, L.; Ke, J.; Yang, Z.; Yang, Y.; Huang, L.; Zhuge, Q.; Hu, W. Reservoir computing system with double optoelectronic feedback loops. Opt. Express 2019, 27, 27431–27440. [Google Scholar] [CrossRef] [PubMed]
- Van Der Sande, G.; Brunner, D.; Soriano, M.C. Advances in photonic reservoir computing. Nanophotonics 2017, 6, 561–576. [Google Scholar] [CrossRef]
- Vandoorne, K.; Mechet, P.; Van Vaerenbergh, T.; Fiers, M.; Morthier, G.; Verstraeten, D.; Schrauwen, B.; Dambre, J.; Bienstman, P. Experimental demonstration of reservoir computing on a silicon photonics chip. Nat. Commun. 2014, 5, 1–6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Torrejon, J.; Riou, M.; Araujo, F.A.; Tsunegi, S.; Khalsa, G.; Querlioz, D.; Bortolotti, P.; Cros, V.; Yakushiji, K.; Fukushima, A. Neuromorphic computing with nanoscale spintronic oscillators. Nature 2017, 547, 428–431. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.; Tang, J.; Li, X.; Gao, B.; Qian, H.; Wu, H. Dynamic memristor-based reservoir computing for high-efficiency temporal signal processing. Nat. Commun. 2021, 12, 408. [Google Scholar] [CrossRef] [PubMed]
- Du, C.; Ma, W.; Chang, T.; Sheridan, P.; Lu, W.D. Biorealistic implementation of synaptic functions with oxide memristors through internal ionic dynamics. Adv. Funct. Mater. 2015, 25, 4290–4299. [Google Scholar] [CrossRef]
- Moon, J.; Ma, W.; Shin, J.H.; Cai, F.; Du, C.; Lee, S.H.; Lu, W.D. Temporal data classification and forecasting using a memristor-based reservoir computing system. Nat. Electron. 2019, 2, 480–487. [Google Scholar] [CrossRef]
- Du, C.; Cai, F.; Zidan, M.A.; Ma, W.; Lee, S.H.; Lu, W.D. Reservoir computing using dynamic memristors for temporal information processing. Nat. Commun. 2017, 8, 1–10. [Google Scholar] [CrossRef]
- Yao, P.; Wu, H.; Gao, B.; Tang, J.; Zhang, Q.; Zhang, W.; Yang, J.J.; Qian, H. Fully hardware-implemented memristor convolutional neural network. Nature 2020, 577, 641–646. [Google Scholar] [CrossRef]
- Liu, Z.; Tang, J.; Gao, B.; Yao, P.; Li, X.; Liu, D.; Zhou, Y.; Qian, H.; Hong, B.; Wu, H. Neural signal analysis with memristor arrays towards high-efficiency brain–machine interfaces. Nat. Commun. 2020, 11, 4234. [Google Scholar] [CrossRef]
- Dion, G.; Mejaouri, S.; Sylvestre, J. Reservoir computing with a single delay-coupled non-linear mechanical oscillator. J. Appl. Phys. 2018, 124, 152132. [Google Scholar] [CrossRef] [Green Version]
- Barazani, B.; Dion, G.; Morissette, J.-F.; Beaudoin, L.; Sylvestre, J. Microfabricated Neuroaccelerometer: Integrating Sensing and Reservoir Computing in MEMS. J. Microelectromech. Syst. 2020, 29, 338–347. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Yang, W.; Zheng, T.; Xiong, X.; Liu, Y.; Wang, Z.; Li, Z.; Zou, X. Novel nondelay-based reservoir computing with a single micromechanical nonlinear resonator for high-efficiency information processing. Microsyst. Nanoeng. 2021, 7, 83. [Google Scholar] [CrossRef] [PubMed]
- Kaajakari, V.; Mattila, T.; Oja, A.; Seppa, H. Nonlinear Limits for Single-Crystal Silicon Microresonators. J. Microelectromech. Syst. 2004, 13, 715–724. [Google Scholar] [CrossRef] [Green Version]
- Kovacic, I.; Brennan, M.J.; Lineton, B. On the resonance response of an asymmetric Duffing oscillator. Int. J. Non-Linear Mech. 2008, 43, 858–867. [Google Scholar] [CrossRef]
- Velichko, A. Neural Network for Low-Memory IoT Devices and MNIST Image Recognition Using Kernels Based on Logistic Map. Electronics 2020, 9, 1432. [Google Scholar] [CrossRef]
- Shougat, M.R.E.U.; Li, X.; Mollik, T.; Perkins, E. A Hopf physical reservoir computer. Sci. Rep. 2021, 11, 19465. [Google Scholar] [CrossRef]
- Legenstein, R.; Maass, W. Edge of chaos and prediction of computational performance for neural circuit models. Neural Netw. Off. J. Int. Neural Netw. Soc. 2007, 20, 323–334. [Google Scholar] [CrossRef]
- LeCun, Y.; Cortes, C. The MNIST Database of Handwritten Digits. 1998. Available online: https://ci.nii.ac.jp/naid/10027939599/ (accessed on 17 February 2022).
- Yan, B.; Liu, Y.; Dong, J. Quality factor estimates of resonant beams with nonlinear vibrations. J. Tsinghua Univ. (Sci. Technol.) 2016, 56, 1055–1060. [Google Scholar] [CrossRef]
- Miller, J.M.L.; Ansari, A.; Heinz, D.B.; Chen, Y.; Flader, I.B.; Shin, D.D.; Villanueva, L.G.; Kenny, T.W. Effective quality factor tuning mechanisms in micromechanical resonators. Appl. Phys. Rev. 2018, 5, 041307. [Google Scholar] [CrossRef]
- De, S.K.; Aluru, N.R. Complex Nonlinear Oscillations in Electrostatically Actuated Microstructures. J. Microelectromech. Syst. 2006, 15, 355–369. [Google Scholar] [CrossRef]
- Han, J.; Zhang, Q.; Wang, W. Static bifurcation and primary resonance analysis of a MEMS resonator actuated by two symmetrical electrodes. Nonlinear Dyn. 2015, 80, 1585–1599. [Google Scholar] [CrossRef]
- Hegger, R.; Kantz, H.; Schreiber, T. Practical implementation of nonlinear time series methods: The TISEAN package. Chaos Interdiscip. J. Nonlinear Sci. 1999, 9, 413–435. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haghighi, H.S.; Markazi, A.H.D. Chaos prediction and control in MEMS resonators. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3091–3099. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Yang, W.; Zheng, T.; Xiong, X.; Guo, X.; Zou, X. Enhancing the Recognition Task Performance of MEMS Resonator-Based Reservoir Computing System via Nonlinearity Tuning. Micromachines 2022, 13, 317. https://doi.org/10.3390/mi13020317
Sun J, Yang W, Zheng T, Xiong X, Guo X, Zou X. Enhancing the Recognition Task Performance of MEMS Resonator-Based Reservoir Computing System via Nonlinearity Tuning. Micromachines. 2022; 13(2):317. https://doi.org/10.3390/mi13020317
Chicago/Turabian StyleSun, Jie, Wuhao Yang, Tianyi Zheng, Xingyin Xiong, Xiaowei Guo, and Xudong Zou. 2022. "Enhancing the Recognition Task Performance of MEMS Resonator-Based Reservoir Computing System via Nonlinearity Tuning" Micromachines 13, no. 2: 317. https://doi.org/10.3390/mi13020317
APA StyleSun, J., Yang, W., Zheng, T., Xiong, X., Guo, X., & Zou, X. (2022). Enhancing the Recognition Task Performance of MEMS Resonator-Based Reservoir Computing System via Nonlinearity Tuning. Micromachines, 13(2), 317. https://doi.org/10.3390/mi13020317