
Design and Feasibility Study of MRG–Based Variable Stiffness Soft Robot
Abstract
1. Introduction
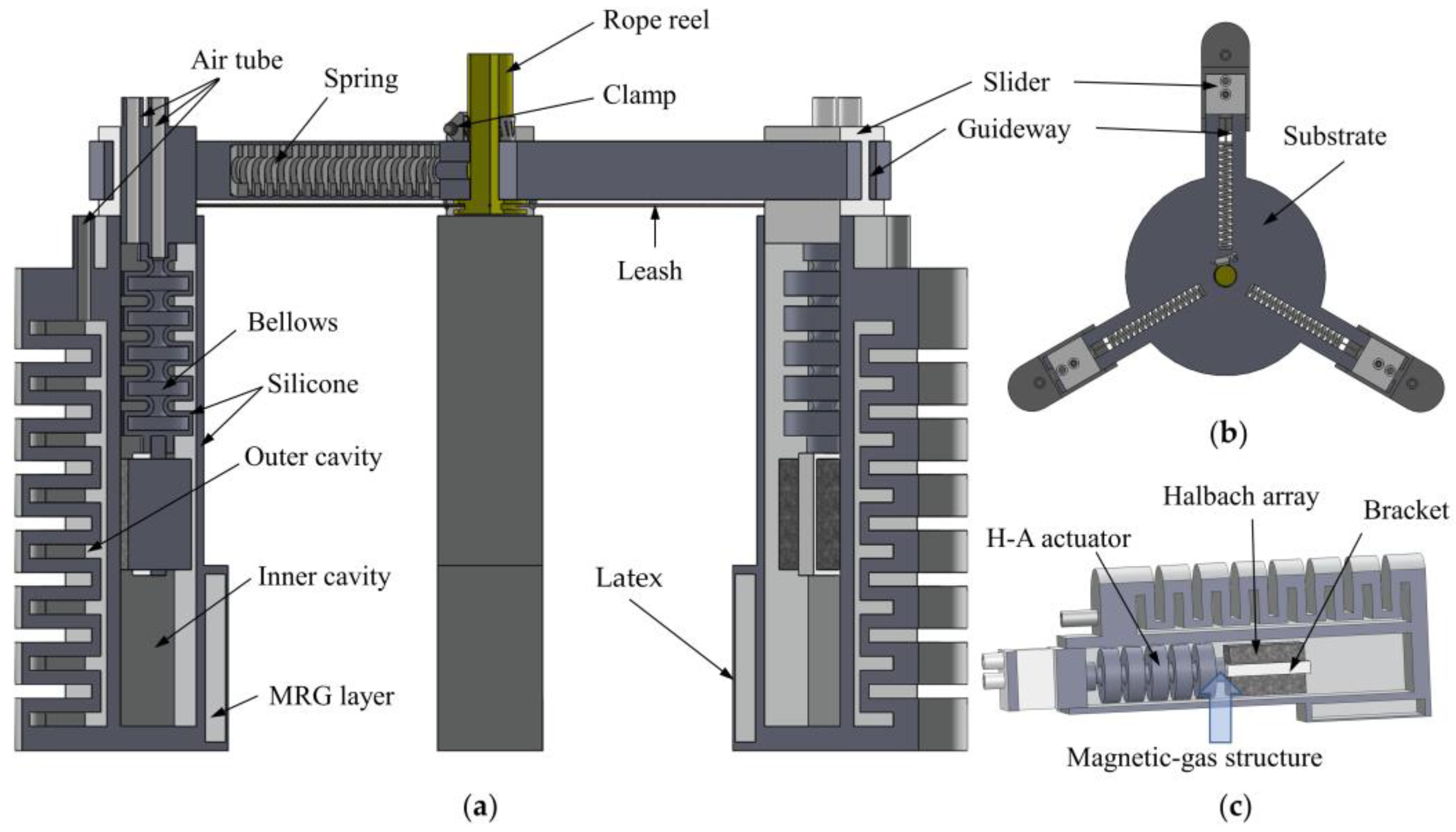
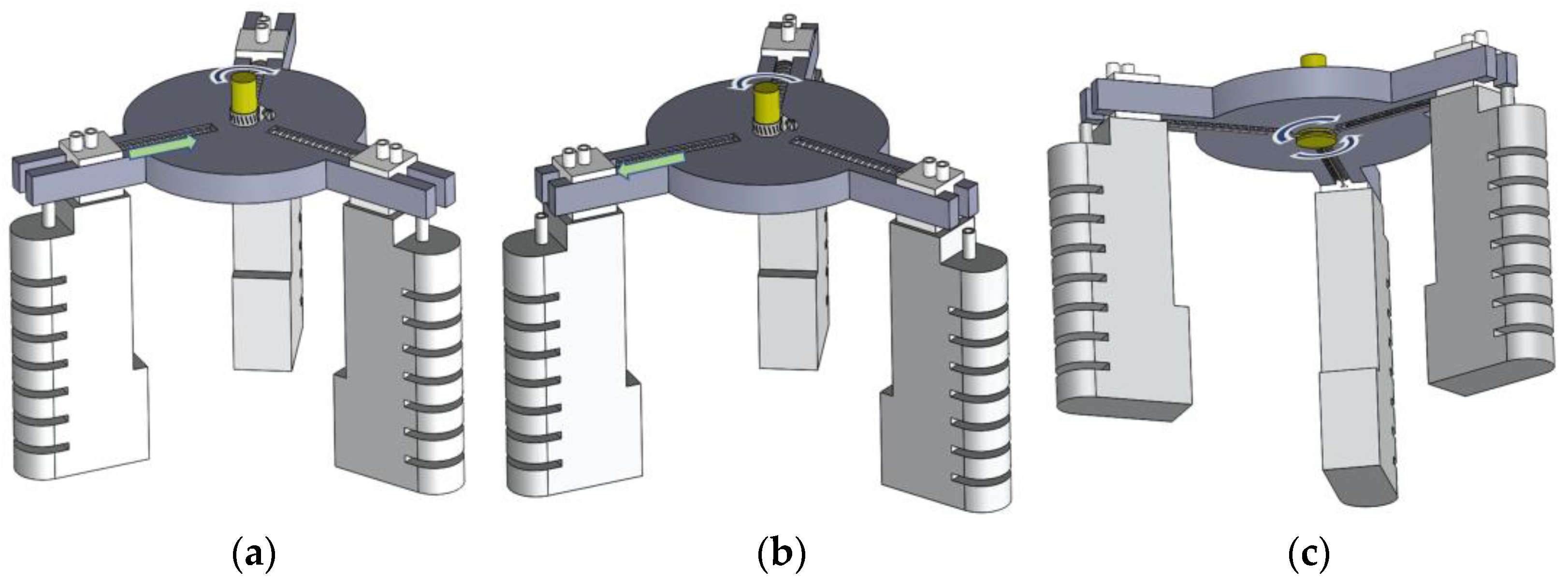
2. Structural Design of The Soft Robot
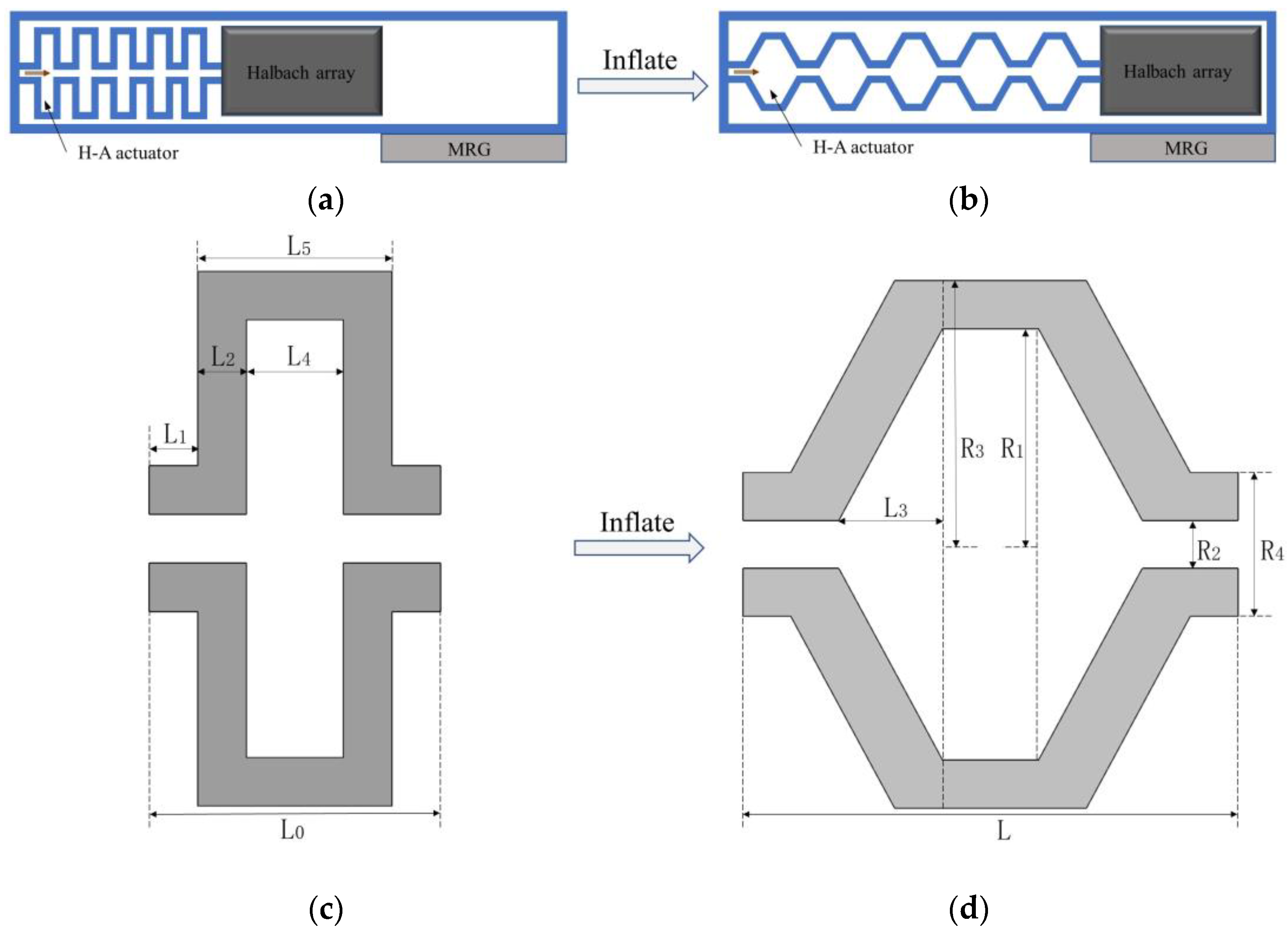
3. Mathematical Model of Magnetic–Air Structure Theory
4. Simulation Analysis of Soft Finger
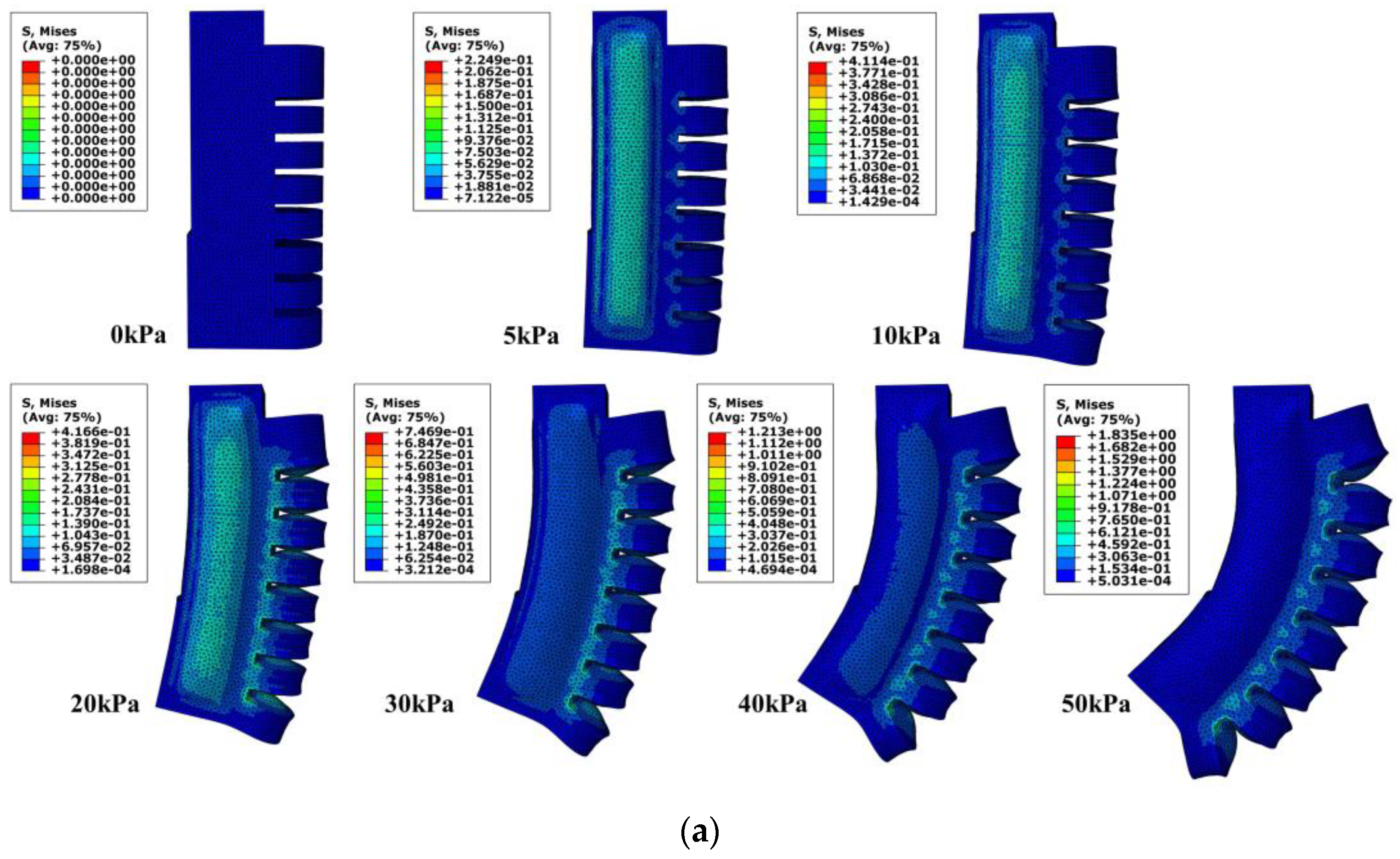
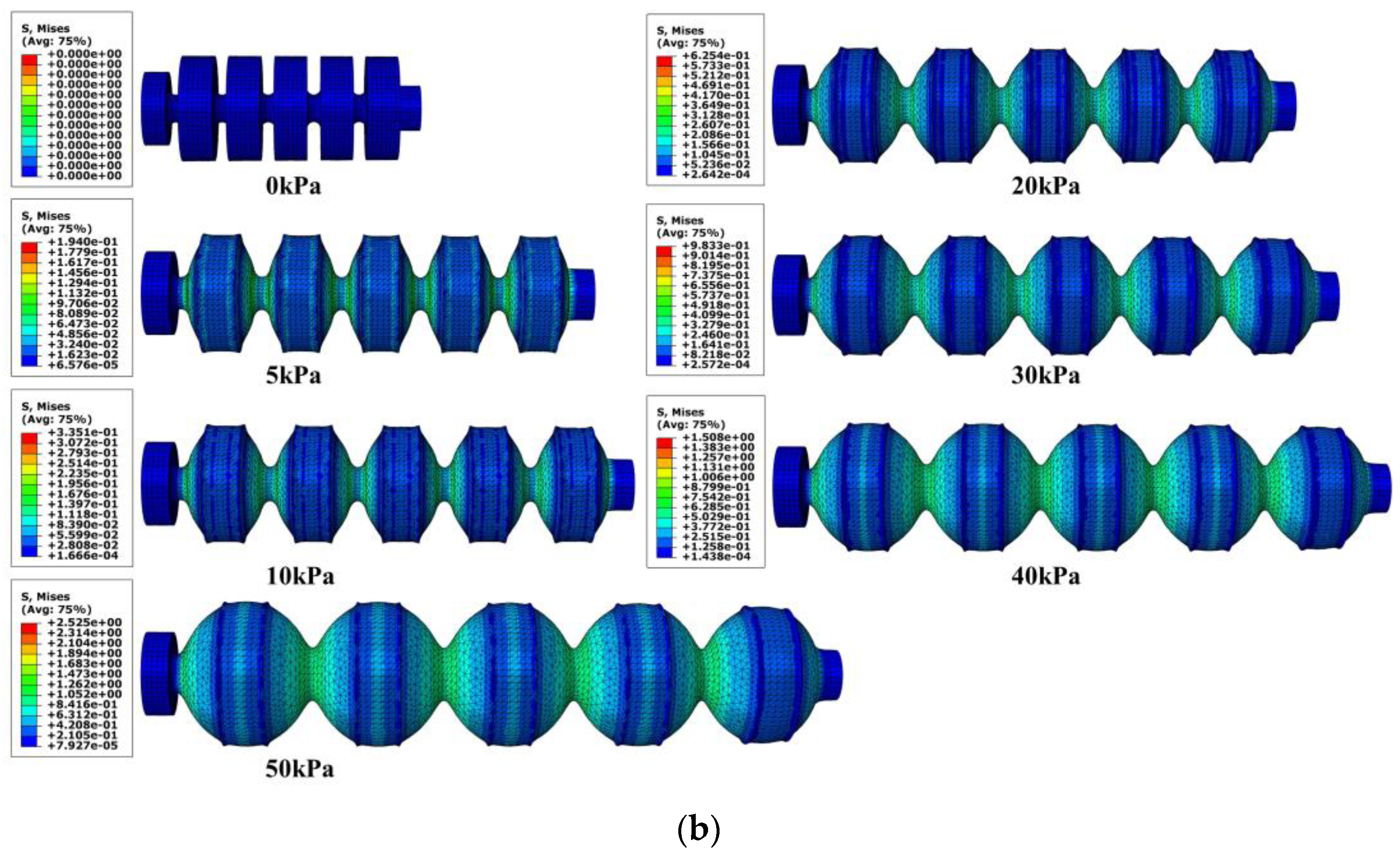
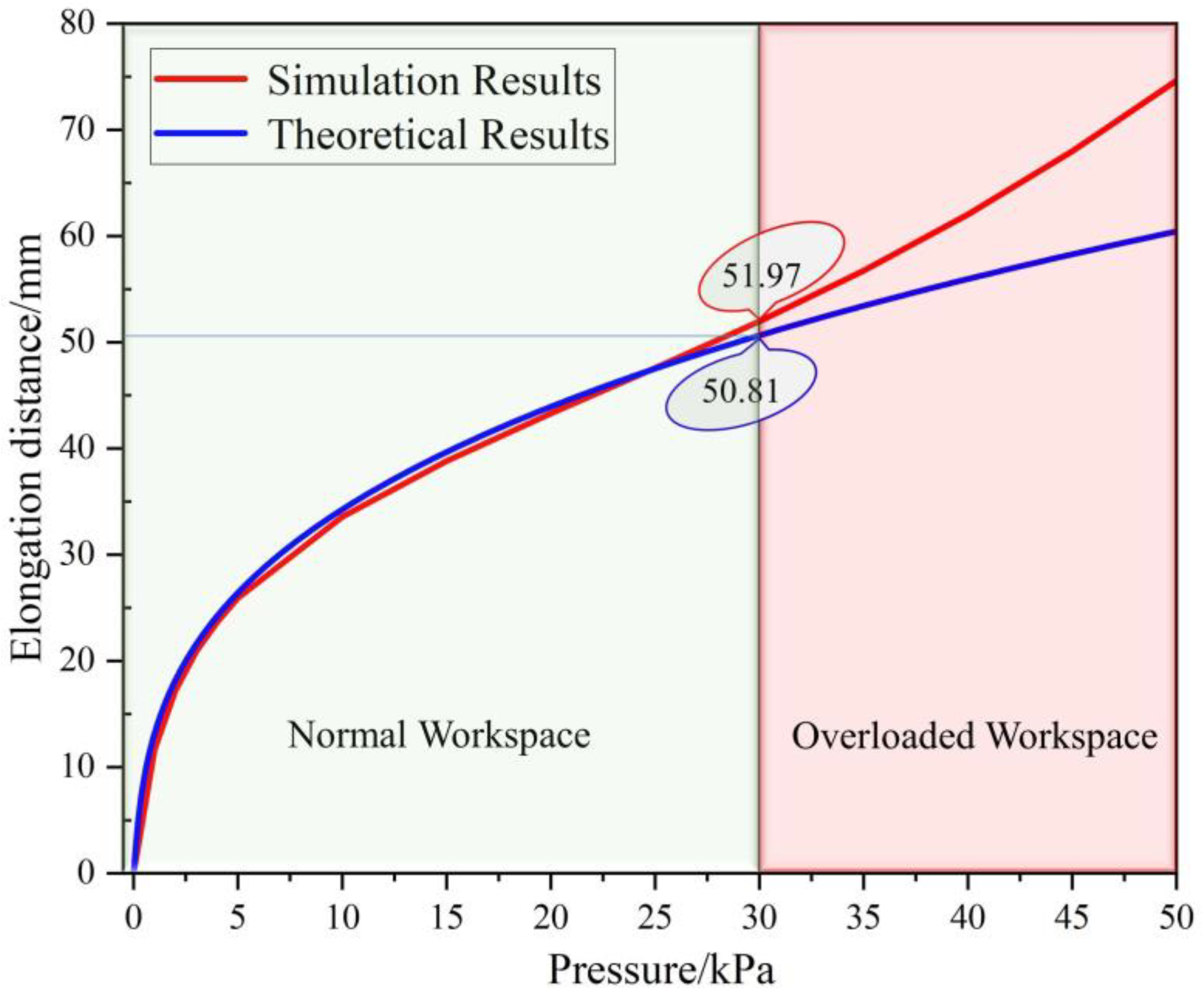
4.1. Motion Simulation Analysis of Bending Actuators
4.2. Motion Simulation Analysis of H–A Actuator
5. Characteristics of MRG under Halbach Array Magnetic Field
5.1. Magnetic Field Analysis of Magnetic–Air Structures
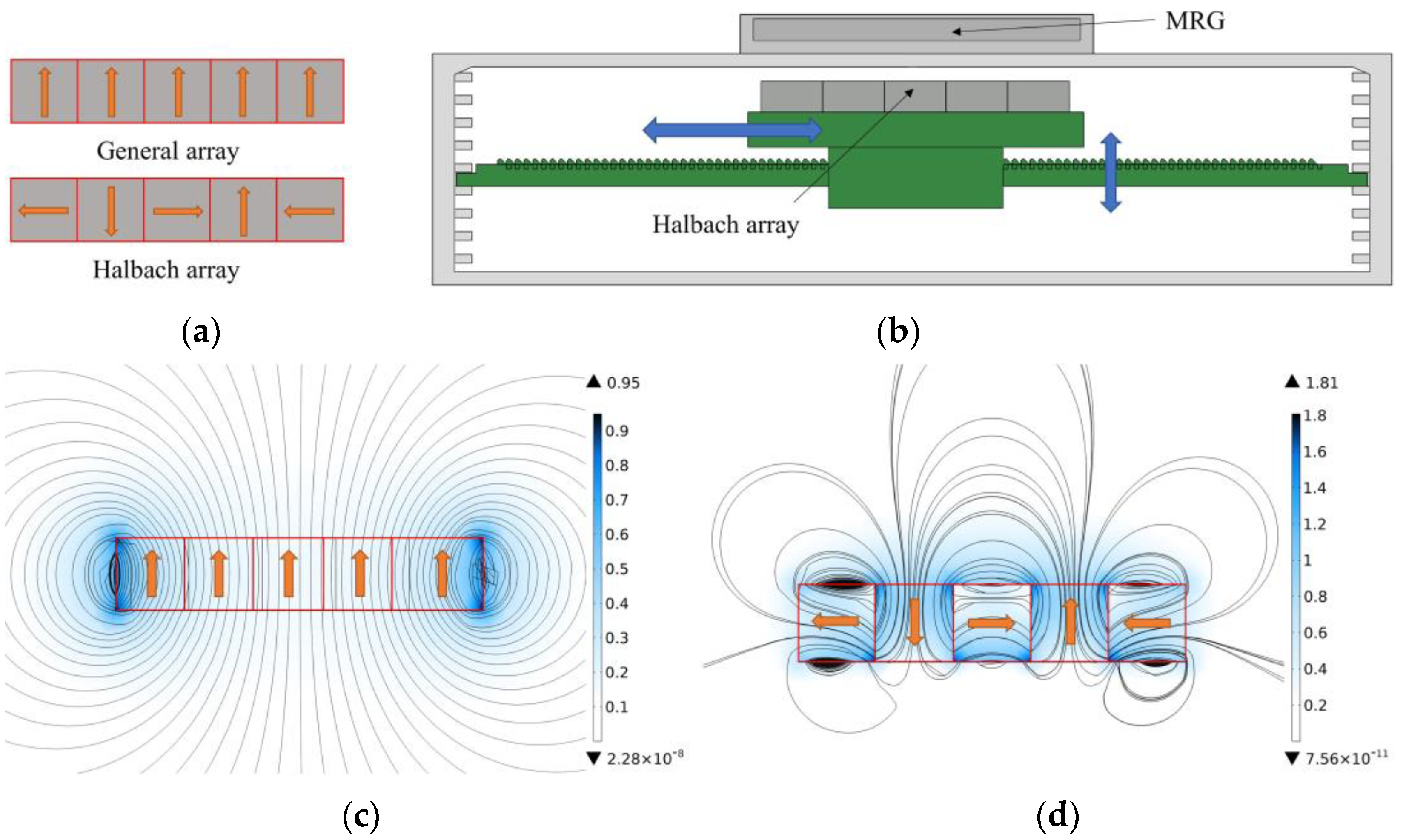
5.1.1. Halbach Array Magnetic Field Analysis
5.1.2. Magnetic Field Analysis of the Halbach Array and MRG Layer
5.2. Magnetic Field Distribution and MRG Layer Characteristics
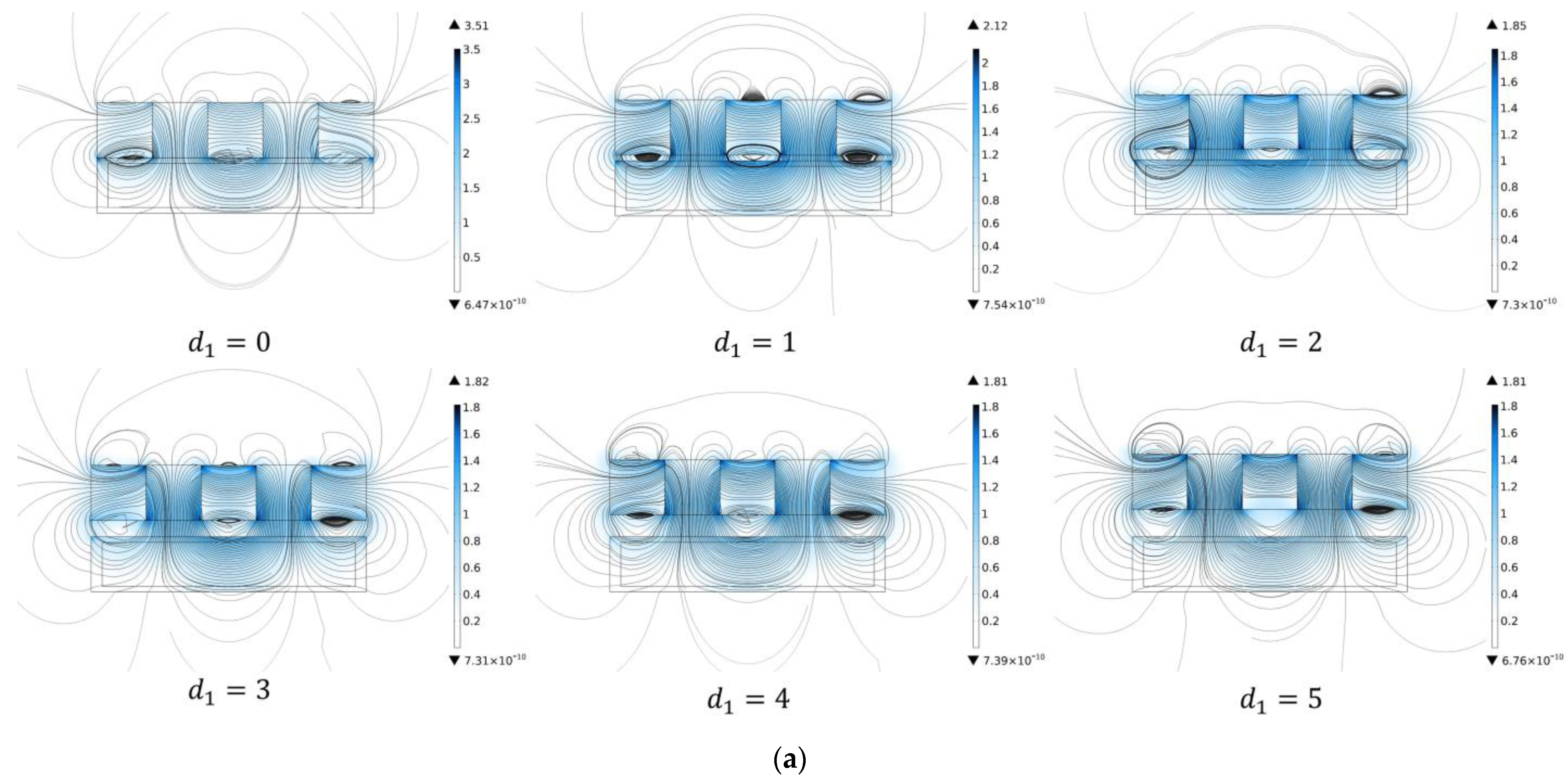
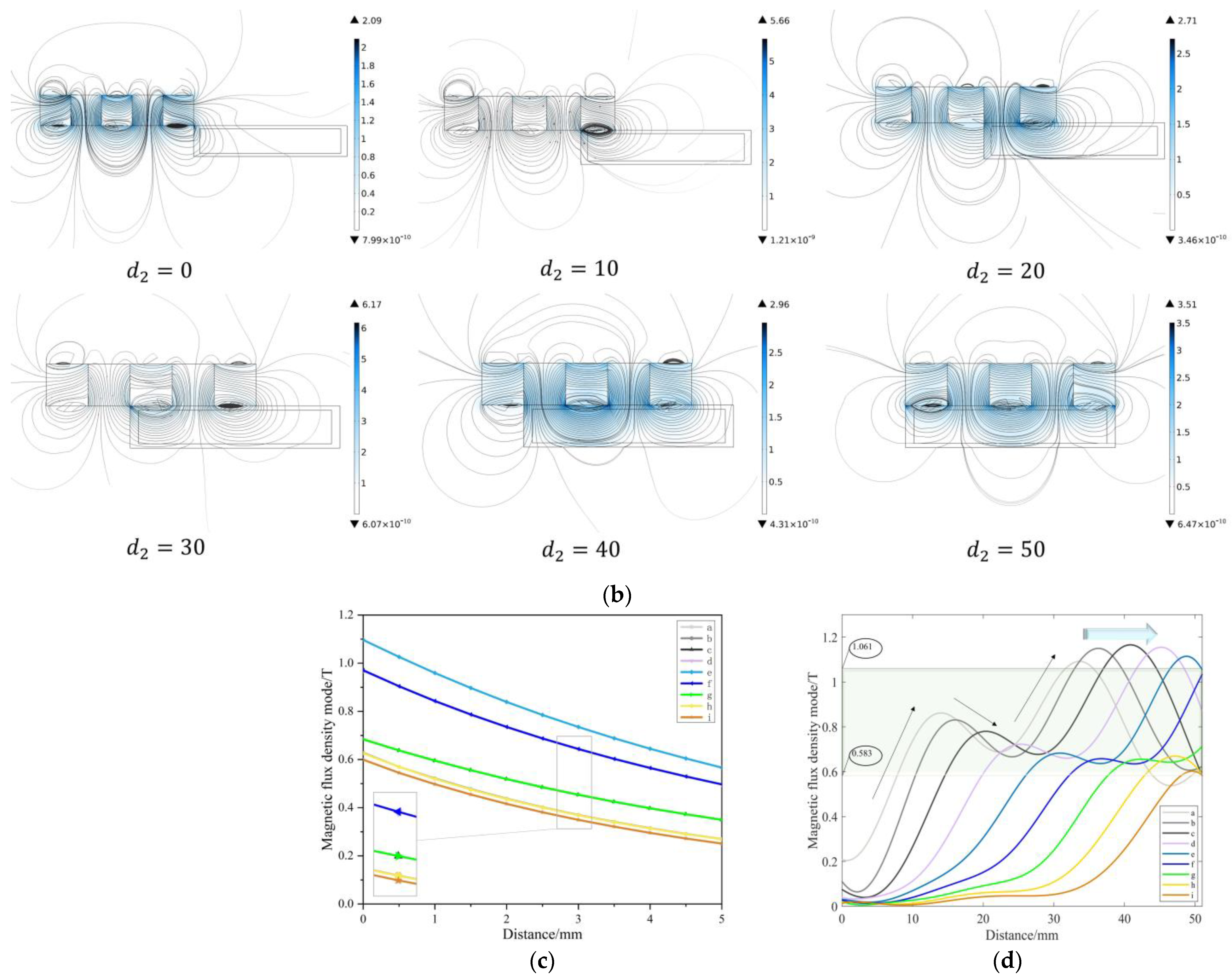
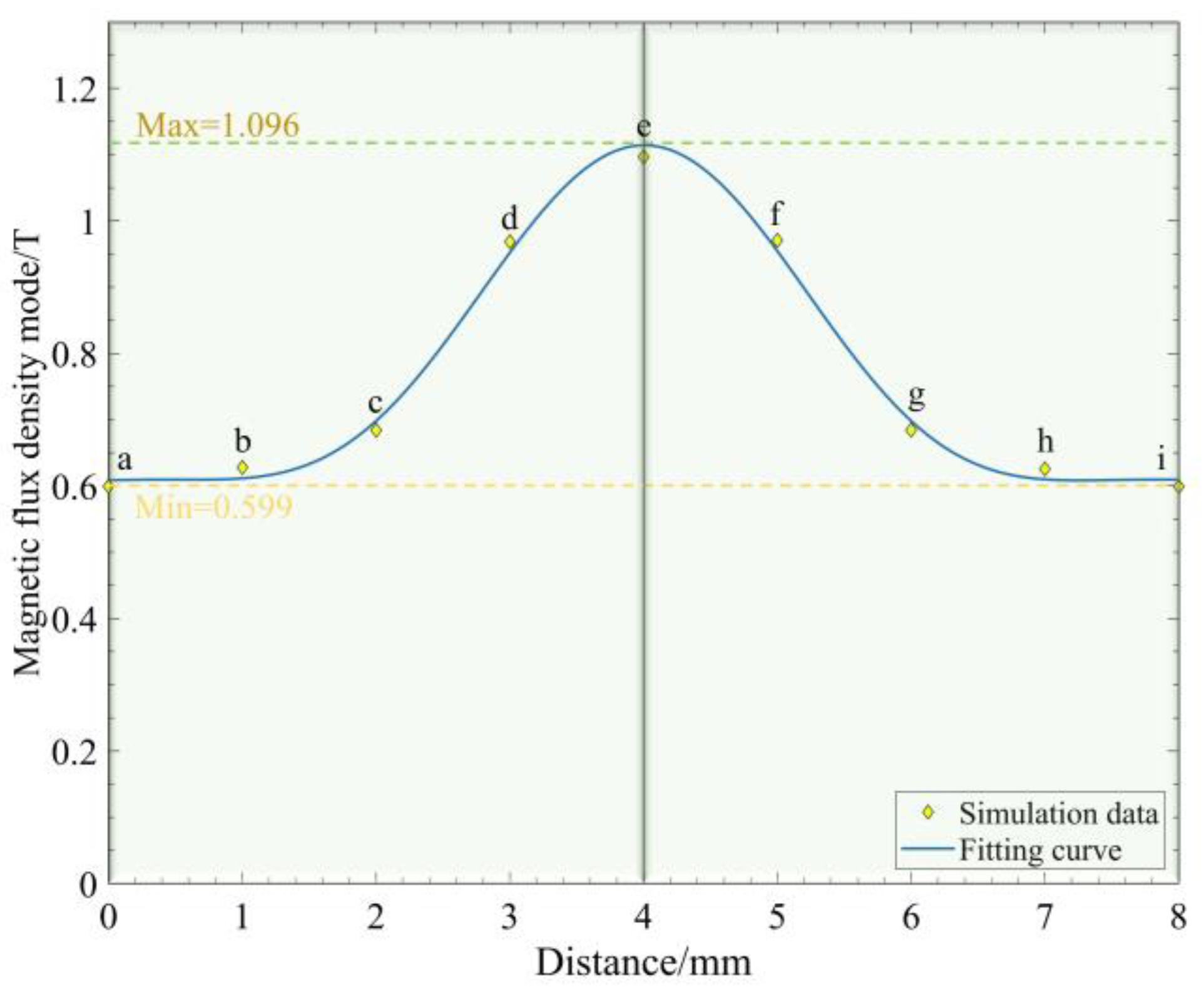
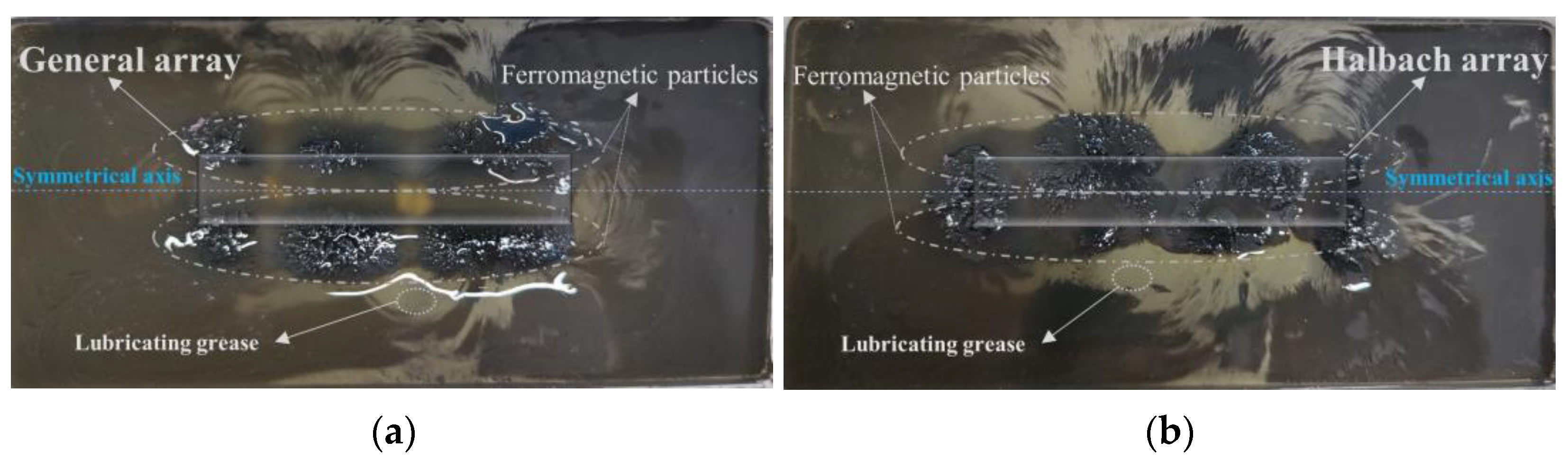
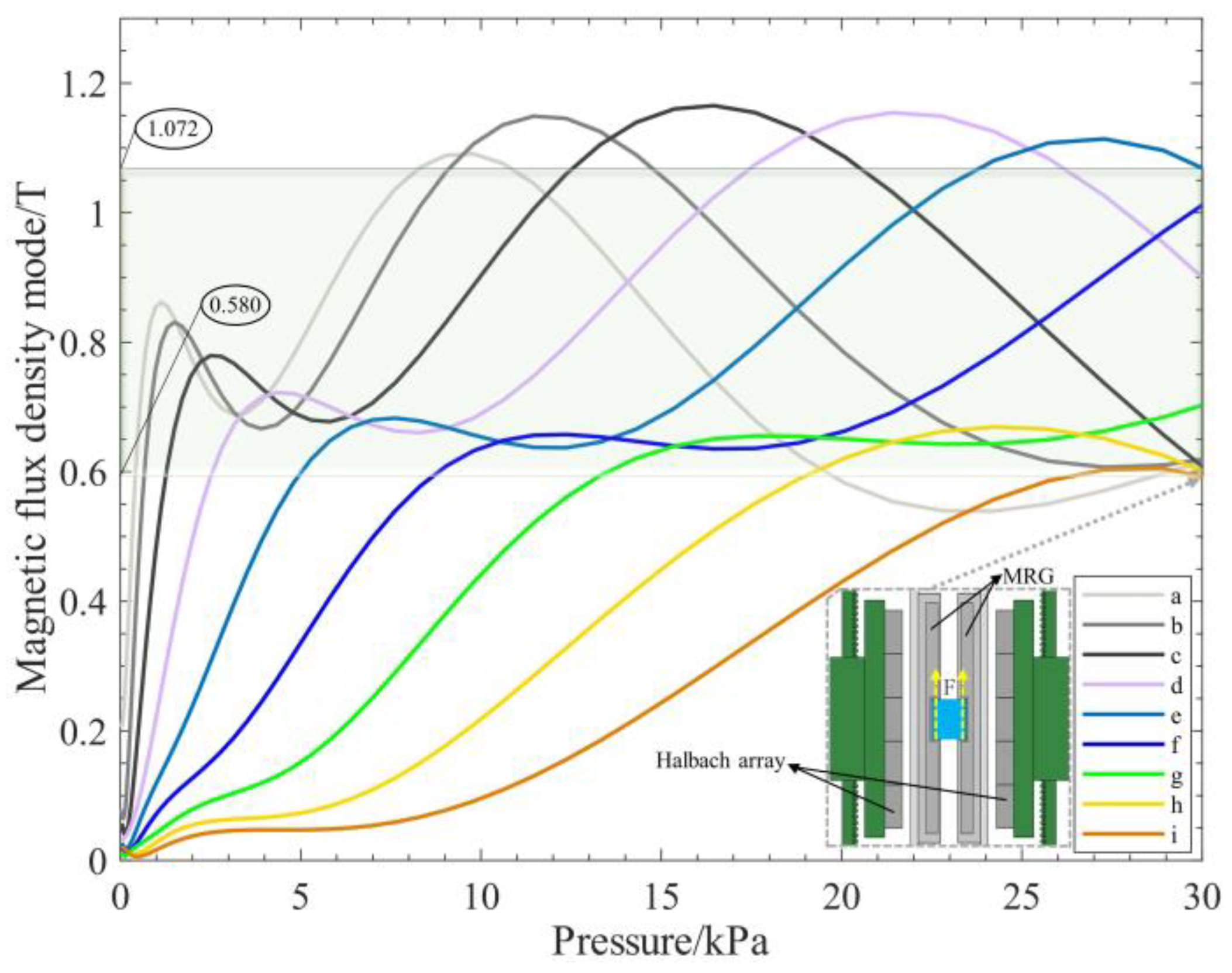
5.2.1. Magnetic Field Distribution of Different Permanent Magnet Arrangements
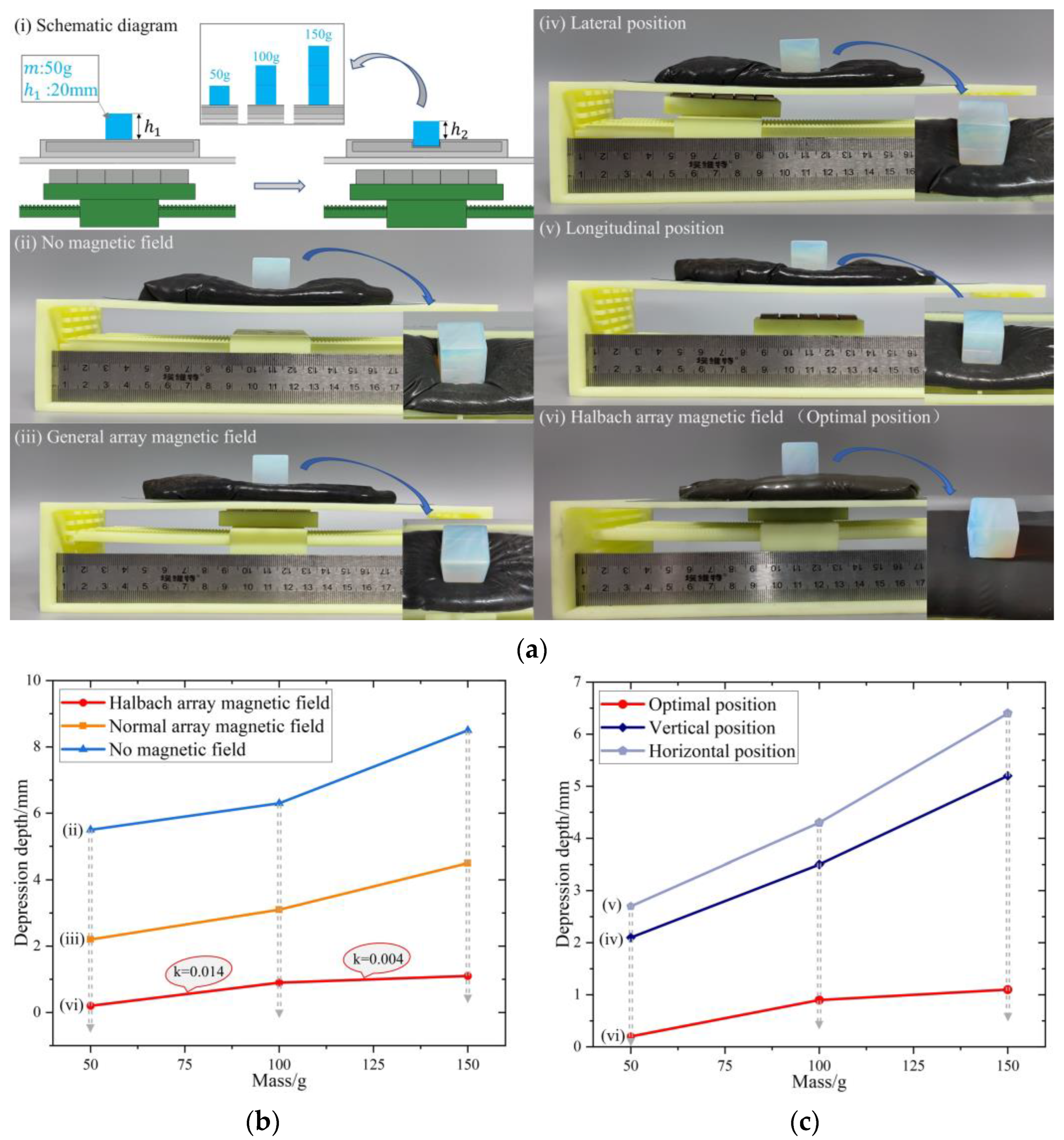
5.2.2. Variable Stiffness of the MRG Layer
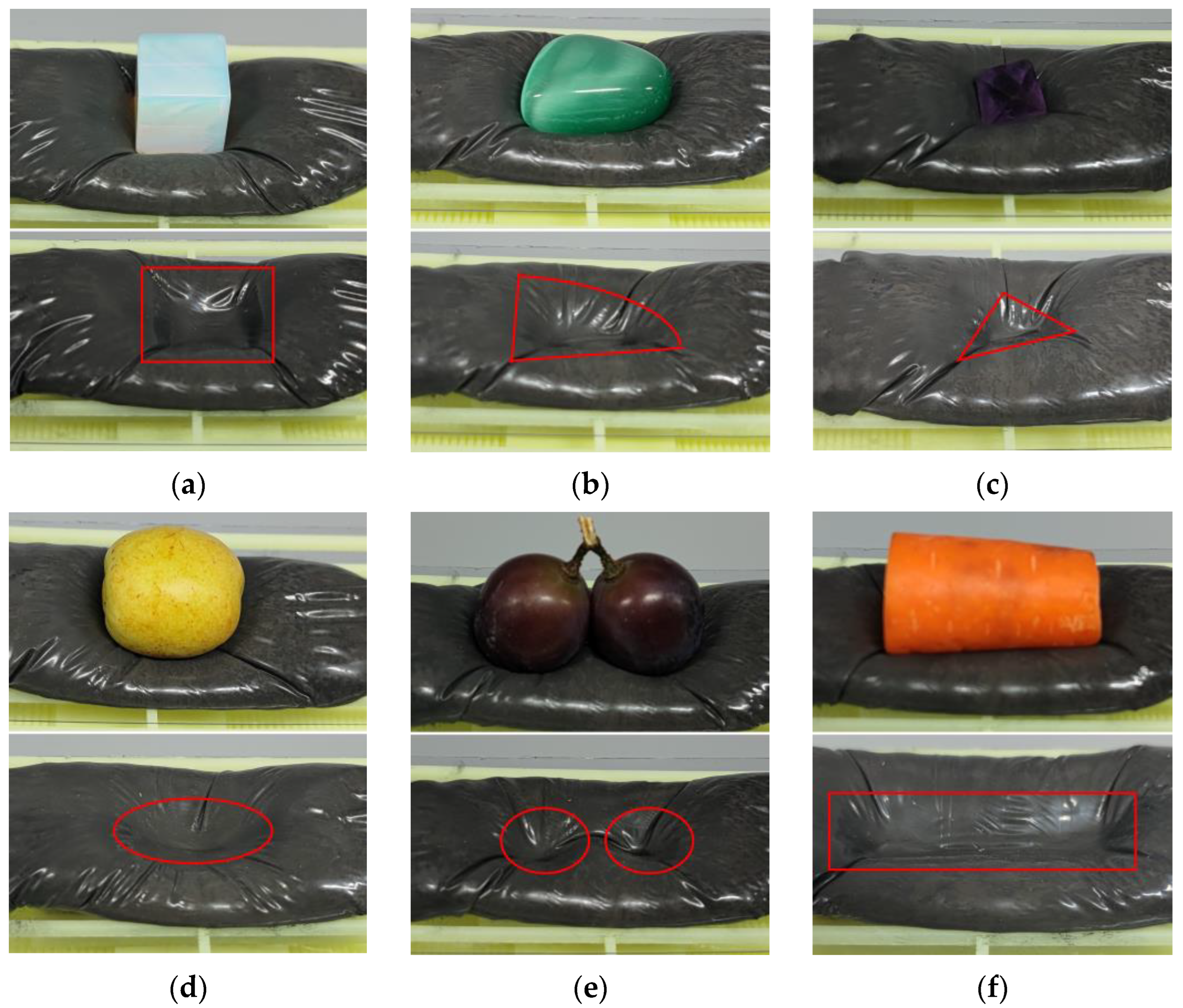
5.2.3. Adaptivity of the MRG Layer
5.3. Soft Gripper Gripping Surface Variable Stiffness Feasibility Analysis
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brunete, A.; Gambao, E.; Koskinen, J.; Heikkilä, T.; Kaldestad, K.B.; Tyapin, I.; Hovland, G.; Surdilovic, D.; Hernando, M.; Bottero, A.; et al. Hard material small–batch industrial machining robot. Robot. Comput.-Integr. Manuf. 2018, 54, 185–199. [Google Scholar] [CrossRef]
- Park, D.; Choi, T.; Kim, H.-S.; Song, S.-H.; Park, H.-S.; Kim, C. Development of a Gripper for Assembly Process Automation Applicable to Commercial Industrial Robots. J. Korean Soc. Manuf. Technol. Eng. 2020, 29, 520–527. [Google Scholar]
- Marwan, Q.M.; Chua, S.C.; Kwek, L.C. Comprehensive Review on Reaching and Grasping of Objects in Robotics. Robotics 2021, 39, 1849–1882. [Google Scholar] [CrossRef]
- Cho, K.-J.; Koh, J.-S.; Kim, S.; Chu, W.-S.; Hong, Y.; Ahn, S.-H. Review of manufacturing processes for soft biomimetic robots. Int. J. Precis. Eng. Manuf. 2009, 10, 171–181. [Google Scholar] [CrossRef]
- Rossiter, J. Soft robotics: The route to true robotic organisms. Artif. Life Robot. 2021, 26, 269–274. [Google Scholar] [CrossRef]
- Yang, B.; Wang, W.; Meng, H.; Wan, W.; Bao, G. Monitoring and control of position and attitude of flexible manipulator with three degrees of freedom. In Proceedings of the IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 208–213. [Google Scholar]
- Chen, X.; Zhang, X.; Liu, H.; Huang, Y. Design and development of a soft robotic manipulator. Int. J. Mech. Mater. Des. 2020, 16, 309–321. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Y.; Li, J.; Hang, G. A micro biomimetic manta ray robot fish actuated by SMA. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1809–1813. [Google Scholar]
- Hartzell, C.M.; Choi, Y.T.; Wereley, N.M.; Leps, T.J. Performance of a magnetorheological fluid–based robotic end effector. Smart Mater. Struct. 2019, 28, 035030. [Google Scholar] [CrossRef]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft robotics for chemists. Angew. Chem. 2011, 123, 1930–1935. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, Q. Design and fabrication of a new dual–arm soft robotic manipulator. Actuators 2019, 8, 5. [Google Scholar] [CrossRef]
- Sureshbabu, A.V.; Metta, G.; Parmiggiani, A. A Systematic Approach to Evaluating and Benchmarking Robotic Hands—The FFP Index. Robotics 2019, 8, 7. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, Fabrication and Control of Soft Robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef]
- Guan, Q.; Sun, J.; Liu, Y.; Wereley, N.M.; Leng, J. Novel bending and helical extensile/contractile pneumatic artificial muscles inspired by elephant trunk. Soft Robot. 2020, 7, 597–614. [Google Scholar] [CrossRef]
- Kitano, S.; Komatsuzaki, T.; Suzuki, I.; Nogawa, M.; Naito, H.; Tanaka, S. Development of a rigidity tunable flexible joint using magneto–rheological compounds—Toward a multijoint manipulator for laparoscopic surgery. Front. Robot. AI 2020, 7, 59. [Google Scholar] [CrossRef]
- Hwang, G.; Park, J.; Cortes, D.S.D.; Hyeon, K.; Kyung, K.-U. Electroadhesion–based high–payload soft gripper with mechanically strengthened structure. IEEE Trans. Ind. Electron. 2021, 69, 642–651. [Google Scholar] [CrossRef]
- Mao, Z.; Asai, Y.; Yamanoi, A.; Seki, Y.; Wiranata, A.; Minaminosono, A. Fluidic rolling robot using voltage–driven oscillating liquid. Smart Mater. Struct. 2022, 31, 105006. [Google Scholar] [CrossRef]
- Bernat, J.; Gajewski, P.; Kapela, R.; Marcinkowska, A.; Superczyńska, P. Design, Fabrication and Analysis of Magnetorheological Soft Gripper. Sensors 2022, 22, 2757. [Google Scholar] [CrossRef]
- Mao, Z.-B.; Asai, Y.; Wiranata, A.; Kong, D.-Q.; Man, J. Eccentric actuator driven by stacked electrohydrodynamic pumps. J. Zhejiang Univ.-Sci. A 2022, 23, 329–334. [Google Scholar] [CrossRef]
- Bishop-Moser, J.; Krishnan, G.; Kim, C.; Kota, S. Design of soft robotic actuators using fluid–filled fiber–reinforced elastomeric enclosures in parallel combinations. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve, Portugal, 7–12 October 2012; pp. 4264–4269. [Google Scholar]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef]
- Jiang, P.; Yang, Y.; Chen, M.Z.; Chen, Y. A variable stiffness gripper based on differential drive particle jamming. Bioinspiration Biomim. 2019, 14, 036009. [Google Scholar] [CrossRef]
- Huixing, W.; Guang, Z.; Qing, O.; Jiong, W. Rheological properties of magnetorheological grease under shear mode. J. Shanghai Jiaotong Univ. 2019, 53, 380. [Google Scholar]
- Hua, D.; Liu, X.; Sun, S.; Sotelo, M.A.; Li, Z.; Li, W. A magnetorheological fluid–filled soft crawling robot with magnetic actuation. IEEE ASME Trans. Mechatron. 2020, 25, 2700–2710. [Google Scholar] [CrossRef]
- Pettersson, A.; Davis, S.; Gray, J.O.; Dodd, T.J.; Ohlsson, T. Design of a magnetorheological robot gripper for handling of delicate food products with varying shapes. J. Food Eng. 2010, 98, 332–338. [Google Scholar] [CrossRef]
- Halbach, K. Permanent magnets for production and use of high energy particle beams. In Proceedings of the Eighth International Workshop on Rare–earth Magnets and Their Applications and the Fourth International Symposium on Magnetic Anisotropy and Coercivity in Rare Earth–Transition Metal Alloys, Dayton, OH, USA, 6 May 1985; pp. 2–11. [Google Scholar]
- Boyce, M.C.; Arruda, E.M. Constitutive models of rubber elasticity: A review. Rubber Chem. Technol. 2000, 73, 504–523. [Google Scholar] [CrossRef]
- Rivlin, R.S. Large elastic deformations of isotropic materials. II. Some uniqueness theorems for pure, homogeneous deformation. Philos. Trans. R. Soc. London. Ser. A. Math. Phys. Sci. 1948, 240, 491–508. [Google Scholar]
- Xu, K.; Simaan, N. Actuation compensation for flexible surgical snake–like robots with redundant remote actuation. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, Florida, 15–19 May 2006; pp. 4148–4154. [Google Scholar]
- Yeoh, O.H. Some forms of the strain energy function for rubber. Rubber Chem. Technol. 1993, 66, 754–771. [Google Scholar] [CrossRef]
- Ali, A.; Hosseini, M.; Sahari, B.B. research, A review and comparison on some rubber elasticity models. J. Sci. Ind. Res. 2010, 69, 495–500. [Google Scholar]
- Huang, W.; Xiao, J.; Xu, Z. Avariable structure pneumatic soft robot. Sci. Rep. 2020, 10, 1–15. [Google Scholar]
- Kim, W.J. High–Precision Planar Magnetic Levitation. Ph.D. Thesis, MIT, Cambridge, MA, USA, November 1997. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Magnetorheological Effects | |||||
|---|---|---|---|---|---|
| Characteristics | Fiber Reinforcement | Particle Blocking | Electromagnetic Coli–MRF | Electromagnetic Coil–MRE | Halbach Array–MRG |
| Overall volume | Middle size | Large size | Large size | Middle size | Small size |
| Response speed | Fast | Average | Fast | Average | Fast |
| Stiffness range | Small | Large | Small | Small | Average |
| Adaptivity | Low | Average | High | Low | High |
| Difficulty of realization | Simple | Simple | Difficult | Difficult | Simple |
| Symbol | Parameter | Value/mm |
|---|---|---|
| Small inner cavity half–length | 1.5 | |
| Sidewall thickness | 1.2 | |
| Large inner cavity internal width | 4.6 | |
| Large inner cavity external width | 7 | |
| Large internal cavity inner diameter | 10.3 | |
| Small internal cavity inner diameter | 3.3 | |
| Large internal cavity volume increase | 11.5 | |
| Small inner cavity outer diameter | 4.5 |
| a | b | c | d | e | f | g | h | i | |
|---|---|---|---|---|---|---|---|---|---|
| 0.674 | 0.665 | 0.593 | 0.538 | 0.491 | 0.915 | 0.458 | 0.007 | 0.246 | |
| 0.262 | 0.332 | 0.413 | 0.371 | 0.245 | 0.346 | 0.236 | 0.273 | 0.368 | |
| 0.058 | 0.032 | 0.171 | 0.277 | 0.379 | 1.044 | 0.412 | 0.277 | 1.978 | |
| 0.026 | 0.058 | 0.182 | 0.187 | 0.141 | 0.558 | 0.111 | 0.333 | 0.147 | |
| 0.004 | 0.012 | 0.048 | 0.015 | 0.104 | 0.013 | 0.062 | 0.053 | 0.158 | |
| 0.176 | 0.163 | 0.078 | 0.061 | 0.071 | 0.019 | 0.081 | 0.050 | 0.244 | |
| 0.067 | 0.134 | 0.041 | 0.075 | 0.086 | 0.228 | 0.074 | 0.113 | 0.395 | |
| 0.095 | 0.092 | 0.101 | 0.098 | 0.097 | 0.070 | 0.072 | 0.068 | 0.002 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Hu, H.; Ouyang, Q. Design and Feasibility Study of MRG–Based Variable Stiffness Soft Robot. Micromachines 2022, 13, 2036. https://doi.org/10.3390/mi13112036
Huang L, Hu H, Ouyang Q. Design and Feasibility Study of MRG–Based Variable Stiffness Soft Robot. Micromachines. 2022; 13(11):2036. https://doi.org/10.3390/mi13112036
Chicago/Turabian StyleHuang, Luojing, Hongsheng Hu, and Qing Ouyang. 2022. "Design and Feasibility Study of MRG–Based Variable Stiffness Soft Robot" Micromachines 13, no. 11: 2036. https://doi.org/10.3390/mi13112036
APA StyleHuang, L., Hu, H., & Ouyang, Q. (2022). Design and Feasibility Study of MRG–Based Variable Stiffness Soft Robot. Micromachines, 13(11), 2036. https://doi.org/10.3390/mi13112036