
A Novel On-Chip Liquid-Metal-Enabled Microvalve



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Experimental Details
2.1. Design of the Microvalve
2.2. Fabrication of the Microvalve
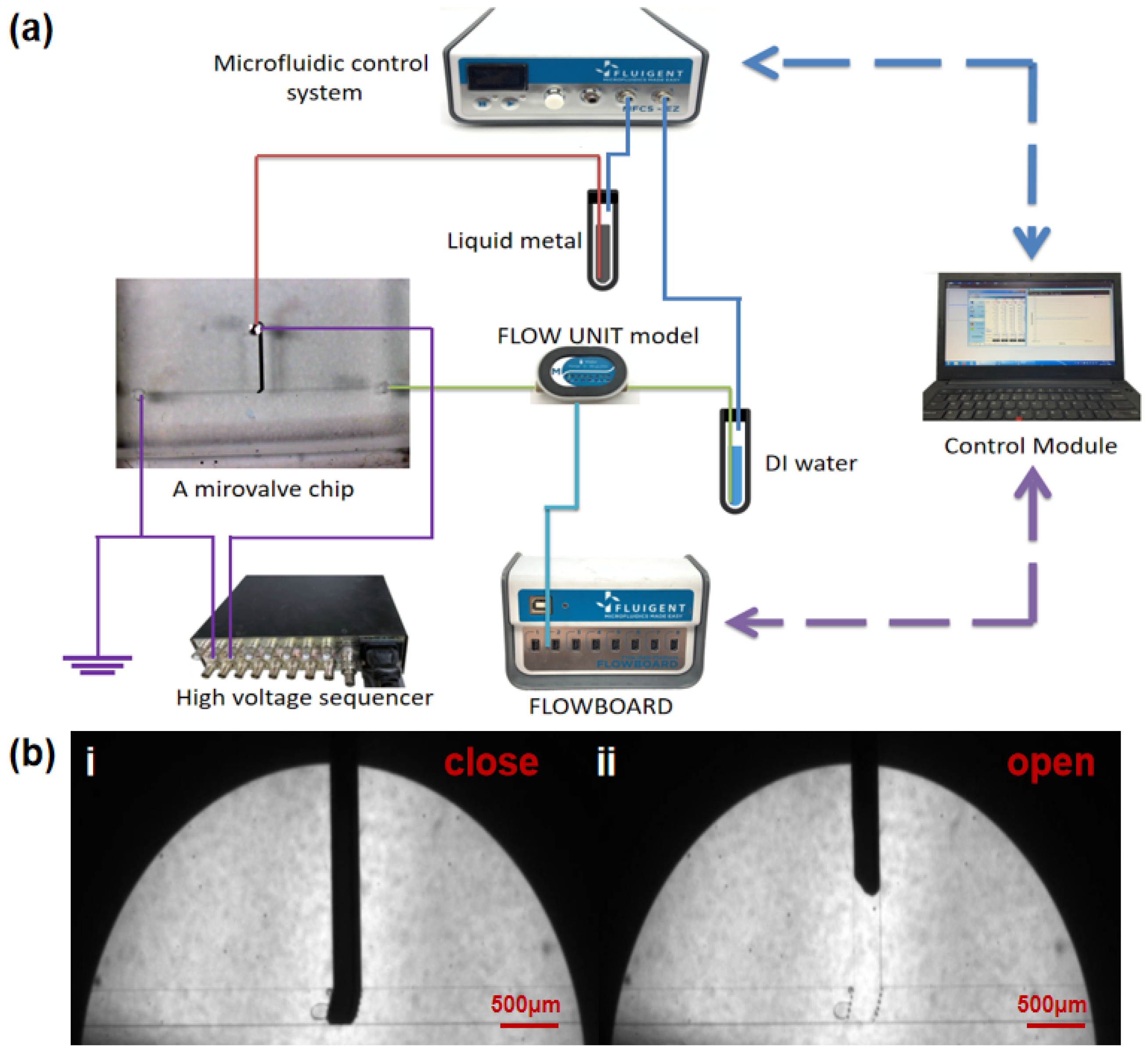
2.3. Device Operation
3. Results and Discussion
3.1. Valve Closing and Opening
3.2. Electrochemical Protection Test
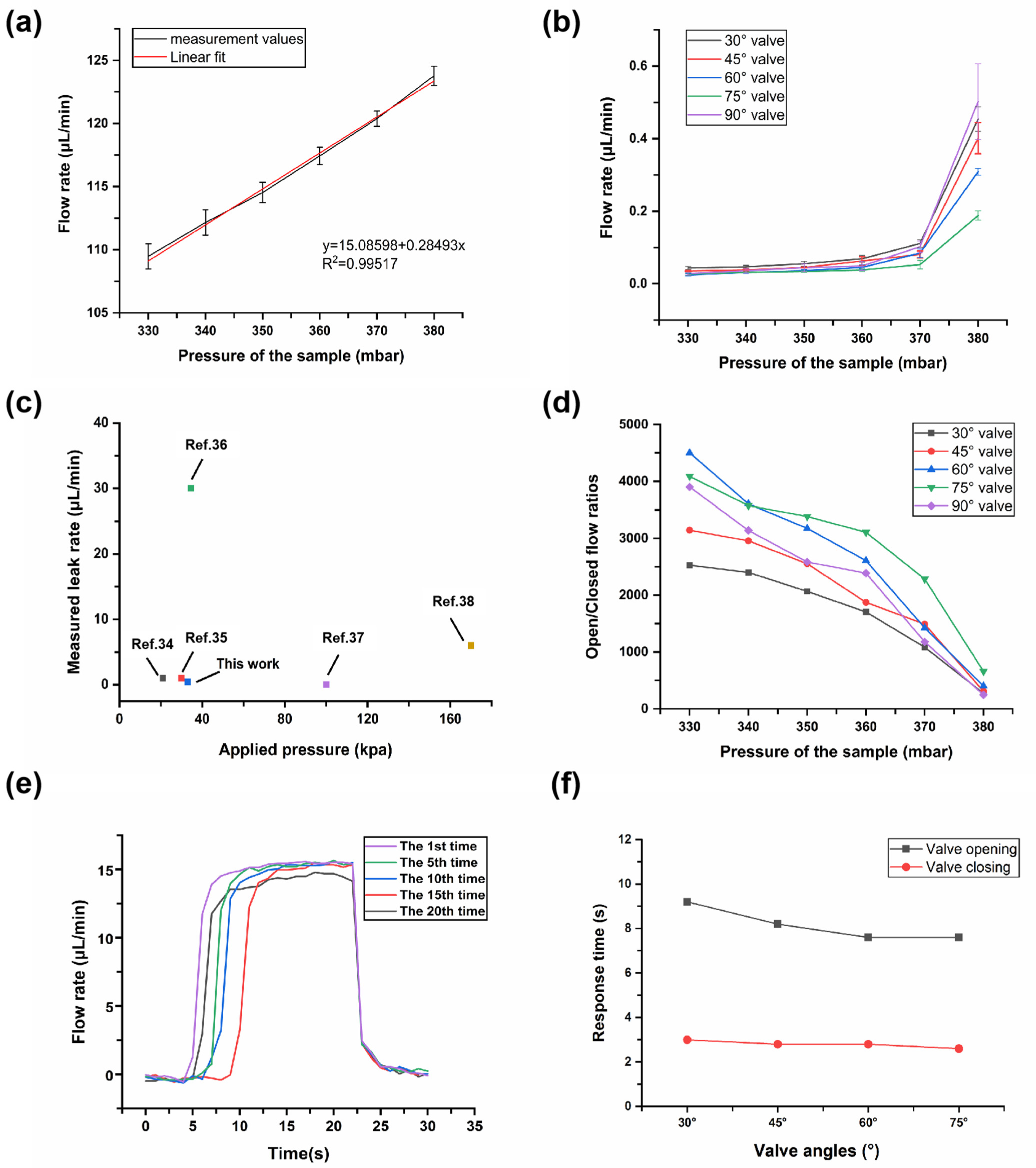
3.3. Repetitiveness
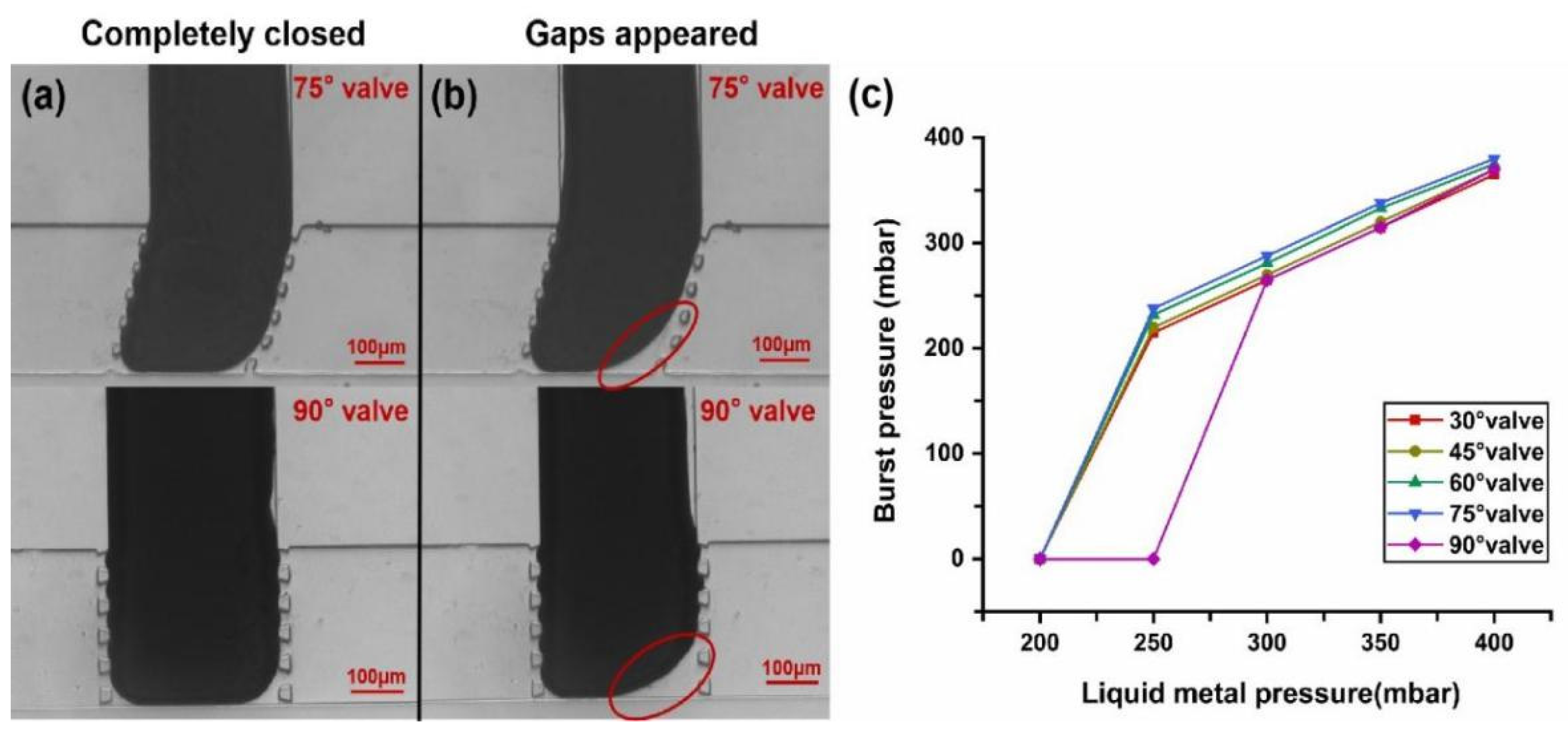
3.4. Valve Tightness
3.5. Valve Response Time
3.6. Burst Pressure
3.7. Application in Bubble Flow Control
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Glick, C.C.; Srimongkol, M.T.; Schwartz, A.J.; Zhuang, W.S.; Lin, J.C.; Warren, R.H.; Tekell, D.R.; Satamalee, P.A.; Lin, L. Rapid assembly of multilayer microfluidic structures via 3D-printed transfer molding and bonding. Microsyst. Nanoeng. 2016, 2, 16063. [Google Scholar] [CrossRef]
- Grover, W.; Skelley, A.M.; Liu, C.N.; Lagally, E.T.; A Mathies, R. Monolithic membrane valves and diaphragm pumps for practical large-scale integration into glass microfluidic devices. Sensors Actuators B Chem. 2003, 89, 315–323. [Google Scholar] [CrossRef]
- Kim, J.; Stockton, A.M.; Jensen, E.C.; Mathies, R.A. Pneumatically actuated microvalve circuits for programmable automation of chemical and biochemical analysis. Lab Chip 2016, 16, 812–819. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; He, Q.; Ma, D.; Chen, H. On-Chip integrated multi-thermo-actuated microvalves of poly(N-isopropylacrylamide) for microflow injection analysis. Anal. Chim. Acta 2010, 665, 107–112. [Google Scholar] [CrossRef]
- Cooksey, G.A.; Sip, C.G.; Folch, A. A multi-purpose microfluidic perfusion system with combinatorial choice of inputs, mixtures, gradient patterns, and flow rates. Lab Chip 2008, 9, 417–426. [Google Scholar] [CrossRef] [PubMed]
- Li, N.; Hsu, C.-H.; Folch, A. Parallel mixing of photolithographically defined nanoliter volumes using elastomeric microvalve arrays. Electrophoresis 2005, 26, 3758–3764. [Google Scholar] [CrossRef]
- Zeng, S.; Li, B.; Su, X.; Qin, J.; Lin, B. Microvalve-Actuated precise control of individual droplets in microfluidic devices. Lab Chip 2009, 9, 1340–1343. [Google Scholar] [CrossRef]
- Ottesen, E.A.; Hong, J.W.; Quake, S.R.; Leadbetter, J.R. Microfluidic digital pcr enables multigene analysis of individual environmental bacteria. Science 2006, 314, 1464–1467. [Google Scholar] [CrossRef]
- Wang, L.; Li, P.C.; Yu, H.-Z.; Parameswaran, A.M. Fungal pathogenic nucleic acid detection achieved with a microfluidic microarray device. Anal. Chim. Acta 2008, 610, 97–104. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Butler, W.B.; Pappas, D. Spatially selective reagent delivery into cancer cells using a two-layer micro-fluidic culture system. Anal. Chim. Acta 2012, 743, 125–130. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Gomez-Sjoberg, R.; Leyrat, A.A.; Pirone, D.M.; Chen, C.; Quake, S.R. Versatile, Fully Automated, Microfluidic Cell Culture System. Anal. Chem. 2007, 79, 8557–8563. [Google Scholar] [CrossRef] [PubMed]
- Volpetti, F.; Garcia-Cordero, J.L.; Maerkl, S.J. A Microfluidic Platform for High-Throughput Multiplexed Protein Quantitation. PLoS ONE 2015, 10, e0117744. [Google Scholar] [CrossRef]
- Anjewierden, D.; A Liddiard, G.; Gale, B. An electrostatic microvalve for pneumatic control of microfluidic systems. J. Micromech. Microeng. 2012, 22, 025019. [Google Scholar] [CrossRef]
- Yoshida, K.; Tanaka, S.; Hagihara, Y.; Tomonari, S.; Esashi, M. Normally closed electrostatic microvalve with pressure balance mechanism for portable fuel cell application. Sens. Actuators A Phys. 2010, 157, 290–298. [Google Scholar] [CrossRef]
- Li, M.; Li, D. Microvalve using electrokinetic motion of electrically induced Janus droplet. Anal. Chim. Acta 2018, 1021, 85–94. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Kim, S.-H.; Ji, C.-H.; Allen, M.G. A solid hydraulically amplified piezoelectric microvalve. J. Micromech. Microeng. 2011, 21, 095003. [Google Scholar] [CrossRef]
- Bozhi, Y.; Qiao, L. A latchable phase-change microvalve with integrated heaters. J. Microelectromech. Syst. 2009, 18, 860–867. [Google Scholar] [CrossRef]
- Luharuka, R.; LeBlanc, S.; Bintoro, J.S.; Berthelot, Y.H.; Hesketh, P.J. Simulated and experimental dynamic response characterization of an electromagnetic microvalve. Sens. Actuators A Phys. 2008, 143, 399–408. [Google Scholar] [CrossRef]
- Kohl, M.; Dittmann, D.; Quandt, E.; Winzek, B.; Miyazaki, S.; Allen, D. Shape memory microvalves based on thin films or rolled sheets. Mater. Sci. Eng. A 1999, 273–275, 784–788. [Google Scholar] [CrossRef]
- Unger, M.A.; Chou, H.-P.; Thorsen, T.; Scherer, A.; Quake, S.R. Monolithic Microfabricated Valves and Pumps by Multilayer Soft Lithography. Science 2000, 288, 113–116. [Google Scholar] [CrossRef]
- Gui, L.; Ren, C.L. Exploration and evaluation of embedded shape memory alloy (sma) microvalves for high aspect ratio microchannels. Sens. Actuators A Phys. 2011, 168, 155–161. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Bhattacharjee, N.; Folch, A. 3D-Printed Quake-style microvalves and micropumps. Lab Chip 2018, 18, 1207–1214. [Google Scholar] [CrossRef]
- So, J.-H.; Dickey, M. Inherently aligned microfluidic electrodes composed of liquid metal. Lab Chip 2011, 11, 905–911. [Google Scholar] [CrossRef] [PubMed]
- Gao, M.; Gui, L. A handy liquid metal based electroosmotic flow pump. Lab Chip 2014, 14, 1866–1872. [Google Scholar] [CrossRef]
- Li, G.; Lee, D.-W. An advanced selective liquid-metal plating technique for stretchable biosensor applications. Lab Chip 2017, 17, 3415–3421. [Google Scholar] [CrossRef] [PubMed]
- Varga, M.; Ladd, C.; Ma, S.; Holbery, J.; Tröster, G. On-Skin liquid metal inertial sensor. Lab Chip 2017, 17, 3272–3278. [Google Scholar] [CrossRef]
- Wang, M.; Trlica, C.; Khan, M.R.; Dickey, M.D.; Adams, J.J. A reconfigurable liquid metal antenna driven by electrochemically controlled capillarity. J. Appl. Phys. 2015, 117, 194901. [Google Scholar] [CrossRef]
- Gao, M.; Gui, L. Development of a fast thermal response microfluidic system using liquid metal. J. Micromech. Microeng. 2016, 26, 75005. [Google Scholar] [CrossRef]
- Debray, A.; Shibata, M.; Fujita, H. A low melting point alloy as a functional material for a one-shot micro-valve. J. Micromech. Microeng. 2007, 17, 1442–1450. [Google Scholar] [CrossRef]
- Shaikh, K.A.; Shifeng, L.; Chang, L. Development of a latchable microvalve employing a low-melting-temperature metal alloy. J. Microelectromech. Syst. 2008, 17, 1195–1203. [Google Scholar] [CrossRef]
- Pekas, N.; Zhang, Q.; Juncker, D. Electrostatic actuator with liquid metal–elastomer compliant electrodes used for on-chip microvalving. J. Micromech. Microeng. 2012, 22, 97001. [Google Scholar] [CrossRef]
- Tang, S.-Y.; Lin, Y.; Joshipura, I.D.; Khoshmanesh, K.; Dickey, M.D. Steering liquid metal flow in microchannels using low voltages. Lab Chip 2015, 15, 3905–3911. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Xu, S.; Liu, J. Surface tension of liquid metal: Role, mechanism and application. Front. Energy 2017, 11, 535–567. [Google Scholar] [CrossRef]
- Oh, K.W.; Rong, R.; Ahn, C.H. In-Line micro ball valve through polymer tubing. In Micro Total Analysis Systems; Springer: Dordrecht, The Netherlands, 2001; pp. 407–408. [Google Scholar]
- Takao, H.; Miyamura, K.; Ebi, H.; Ashiki, M.; Sawada, K.; Ishida, M. A MEMS microvalve with PDMS diaphragm and two-chamber configuration of thermo-pneumatic actuator for integrated blood test system on silicon. Sens. Actuators A Phys. 2005, 119, 468–475. [Google Scholar] [CrossRef]
- Jerman, H. Electrically activated normally closed diaphragm valves. J. Micromech. Microeng. 1994, 4, 210–216. [Google Scholar] [CrossRef]
- Rogge, T.; Rummler, Z.; Schomburg, W.K. Polymer micro valve with a hydraulic piezo-drive fabricated by the AMANDA process. Sens. Actuators A Phys. 2004, 110, 206–212. [Google Scholar] [CrossRef]
- Yang, X.; Holke, A.; Jacobson, S.A.; Lang, J.H.; Schmidt, M.A.; Umans, S.D. An electrostatic, on/off microvalve designed for gas fuel delivery for the MIT microengine. J. Microelectromech. Syst. 2004, 13, 660–668. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, J.; Wang, Q.; Liu, B.; Zhang, H.; Gui, L. A Novel On-Chip Liquid-Metal-Enabled Microvalve. Micromachines 2021, 12, 1051. https://doi.org/10.3390/mi12091051
Gong J, Wang Q, Liu B, Zhang H, Gui L. A Novel On-Chip Liquid-Metal-Enabled Microvalve. Micromachines. 2021; 12(9):1051. https://doi.org/10.3390/mi12091051
Chicago/Turabian StyleGong, Jiahao, Qifu Wang, Bingxin Liu, Huimin Zhang, and Lin Gui. 2021. "A Novel On-Chip Liquid-Metal-Enabled Microvalve" Micromachines 12, no. 9: 1051. https://doi.org/10.3390/mi12091051
APA StyleGong, J., Wang, Q., Liu, B., Zhang, H., & Gui, L. (2021). A Novel On-Chip Liquid-Metal-Enabled Microvalve. Micromachines, 12(9), 1051. https://doi.org/10.3390/mi12091051