1. Introduction
Light-induced mechanical actuation has been of significant interest to the microsystems community for decades (see [
1]) as it offers a remote, wireless means of power and control, which is necessary for autonomous design concepts that demand electrical isolation. At the micro- and mesoscales, applications cited in the literature include, but are certainly not limited to, drug delivery [
2], microrobotic locomotion [
3,
4,
5], haptic displays [
6,
7], scanning probe microscopy engines [
8], actuation of tunable microlenses for endoscopy [
9] and self-regulating mechanisms, such as automatic grippers [
10], smart curtains/windows [
11] and artificial self-adjusting optical iris [
12]. Like other forms of stimuli-responsive actuation, which have been well summarized in recent review articles [
13,
14,
15], the “smart” or “reconfigurable” device behavior that is being exploited is a result of both the material response and the structural design. At the microscale, the device fabrication is most commonly accomplished through conventional microfabrication methods based upon UV lithography being applied to layered thin films, although localized modification and additive manufacturing have also become more prevalent through direct laser writing [
13].
For most devices operating in a non-aqueous environment, the photothermal actuation response is traditionally predicated upon light being absorbed near the surface of or within the film(s) generating heat which in turn modifies the internal stress profiles through the structure. This creation or relaxation of the stresses from the light absorption can impart structural deformation via thermal expansion effects from the device geometry alone, which enables designs to be made from a single material (such as polycrystalline silicon) [
16,
17,
18]. However, this approach is somewhat limiting in terms of the amount of stress differential and subsequent deformation that can be produced within a given area. Thus, it is common for many designs in the literature to use dissimilar layered films and exploit the differences in the mechanical properties between them to further enhance actuation, namely the intrinsic stress and coefficient of thermal expansion [
3,
11,
19]. While the overall device response varies depending upon the structure, the material response achieved through this traditional photothermal actuation is largely linear, as the stress and deformation scale proportional to temperature, making it useful for many applications that demand analog control.
In the last few decades, several groups have explored using carbon materials (i.e., carbon nanotubes, carbon nanoparticles, graphene oxide flakes) and various polymer blends to enhance the photoabsorption and photomechanical properties of the films used as a means to improve upon the overall photothermomechanical response [
2,
13,
20,
21,
22,
23]. Similarly, numerous research groups have been advancing materials that exhibit nonlinear photothermal responses to further expand capability; for instance, by triggering dynamics that exceed the limitations of thermal time constants or adding hysteresis to enable memory effects. These include shape memory alloys (e.g., nickel titanium) [
19], shape memory polymers [
5], liquid crystal polymers [
12,
24,
25] and other phase change materials (e.g., vanadium oxide, paraffin) [
5,
21,
26], some of which incorporate photo-chemical effects. Some of these novel material solutions have yet to be integrated with wafer-scale microfabrication techniques, making this a rich area for future device development.
In this study, we successfully demonstrated photothermal actuation of large out-of-plane multilayer structures that are capable of large-angle optical beam steering and shaping via control of a central, reflective, thin, Au-coated plate. The devices were fabricated using conventional surface micromachining films but employed a non-traditional structural geometry to achieve the desired photothermal response. The structural design employed was similar to the inverted series-connected devices reported by the Xie group [
9,
27,
28,
29,
30,
31] in that it involved a chain of series connected with out-of-plane S-shaped beams. However, our design incorporated stressed films on the surface of a structural layer, allowing them to be fabricated predominantly via a commercial foundry process. These structures were originally intended as electrostatically actuated prototype undercarriages for high fill-factor micromirror arrays capable of large angle 3DOF (tip–tilt–piston) motion [
32,
33]. We recently reported that these structures, unmodified, can be photothermally actuated through small AC modulation of an infrared illuminator, making it possible to measure the frequency response of the structure up to 1 kHz [
34]. In this paper, we report the steady-state unit step behavior (low sampling rate) of these devices under broad Gaussian illumination and show that with the addition of a single patterned absorber coating, large-angle beam steering can be achieved towards a preferential direction autonomously. In addition, we show that heating effects associated with the central mirror cause its curvature to relax as the beam steering increases, resulting in simultaneous change of the reflected beam profile.
To our knowledge, photothermal actuation for the purpose of large-angle optical beam steering has not been reported before, nor any photothermal characterization, for these types of large-deformation structures. The demonstration we show of photothermal one-directional tilt actuation in this work, seems possible to achieve with a simpler highly stressed bilayer cantilever beam based approach with patterned optical coatings. However, our structure offers (1) mechanically reduced coupling of the actuator and the optical reflector, allowing each to be independently altered; (2) a more compressed area footprint by virtue of the successive interconnected S-beams; and (3) the potential for multi-directional (both tip and tilt) photothermal actuation with more sophisticated coating patterns being applied to the structure’s actuator arms. These qualities make it interesting for photothermal actuation design and characterization.
2. Design and Fabrication
The thin-film microstructures examined in this work were designed to achieve large out-of-plane deformation, upon removal of the sacrificial material (phosophosilicate glass), by leveraging the differences in constituent film stresses present after their deposition. These stresses are primarily an artifact of each layer’s mismatch in thermal expansion with respect to the underlying layer. The structures each spanned a ~1 mm
2 area and were fabricated through the use of the PolyMUMPs
TM foundry process (specifically, the 1.5 µm thick POLY2 layer and 500 nm thick Au layer—see [
35]) in conjunction with post-processing of additional lithographically patterned films. The first post-processed layer was 1-µm-thick non-stoichiometric Si
3N
4, deposited via plasma enhanced chemical vapor deposition (PECVD) (temperature = 300 °C, power = 60 W, pressure = 800 mT, SiHe = 167 sccm, N
2 = 200 sccm, NH
3 = 2 sccm, He = 600 sccm), which provided a compressively stressed structural layer that was selectively patterned. The Si
3N
4 patterning was accomplished by selectively masking the regions where material was desired with photoresist (AZ 4620) and then performing a reactive ion etch process (CF4 40 sccm, O2 3 sccm, 100 W, 50 mT). This etch had to be performed long enough to accommodate for any film non-uniformity and ensure removal of all the unwanted nitride. The second post-processed layer was a 200-nm-thick layer of evaporated chromium intended as a moderate broadband infrared absorber that was applied selectively to the structure via a conventional liftoff method, using a two-layer photoresist stack (LOR 10A liftoff layer and SPR 955.07 photoresist). All photoresists were deposited using conventional spin coating (4000 rpm, 30 ramp, 30 s) on each chip sample individually.
Figure 1 provides an illustrative graphic for a single notional s-shaped cantilever using these films. The black arrows in
Figure 1 indicate the primary film stress direction before release, assuming residual thermal film stress dominates based upon the coefficient of thermal expansion (CTE) values (see
Table 1) for each film. The film stresses are more relaxed by the resultant S-shaped structural deformation after release. When illuminated by the infrared laser, the photothermal heating from the absorber layer and subsequent differential expansion of the films induces stresses in the reverse direction, allowing the deformation to flatten and overall downward motion at the end of the cantilever to occur.
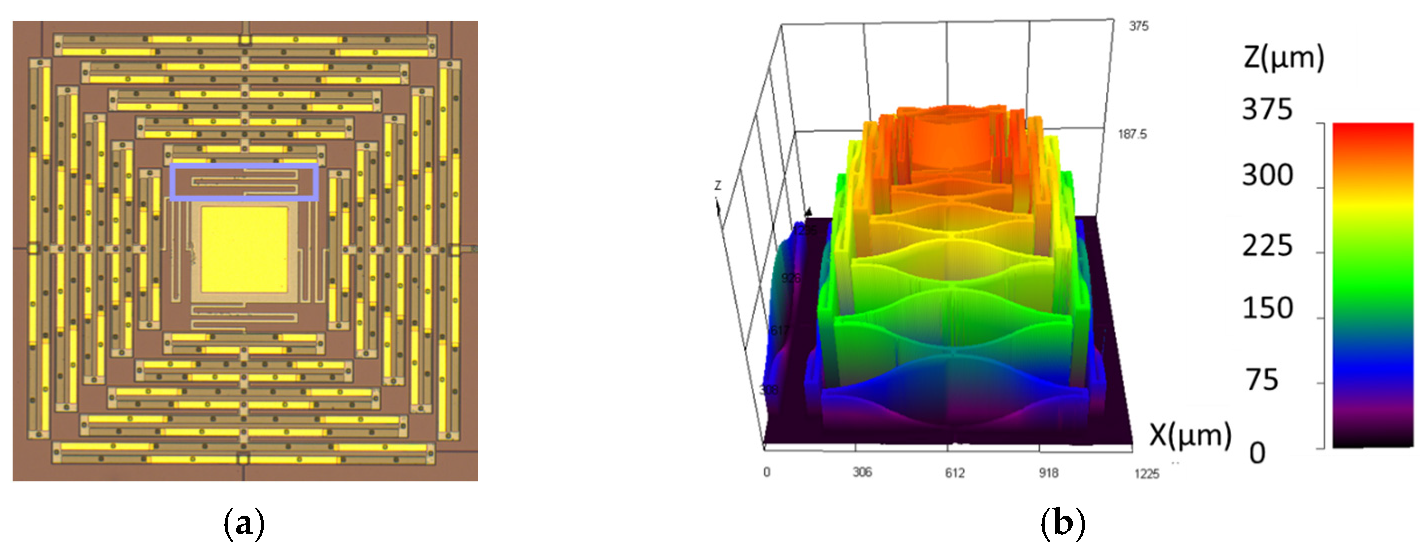
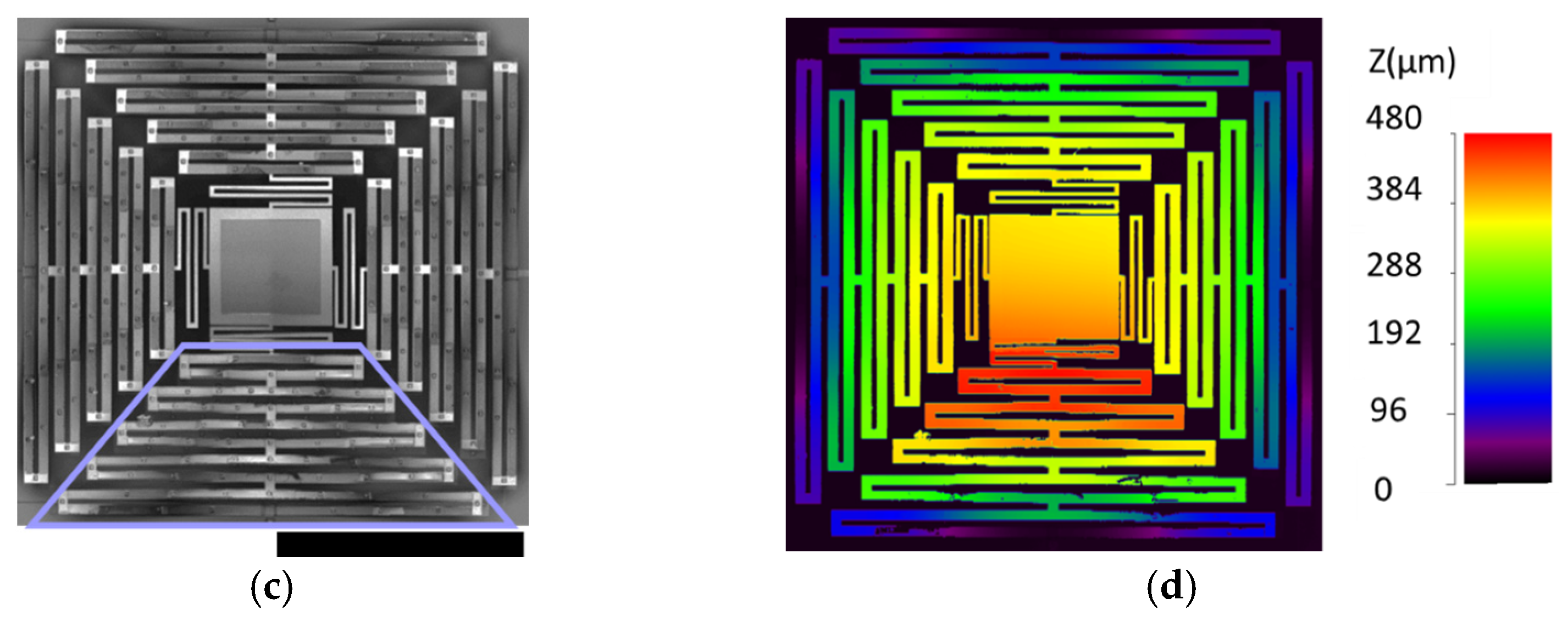
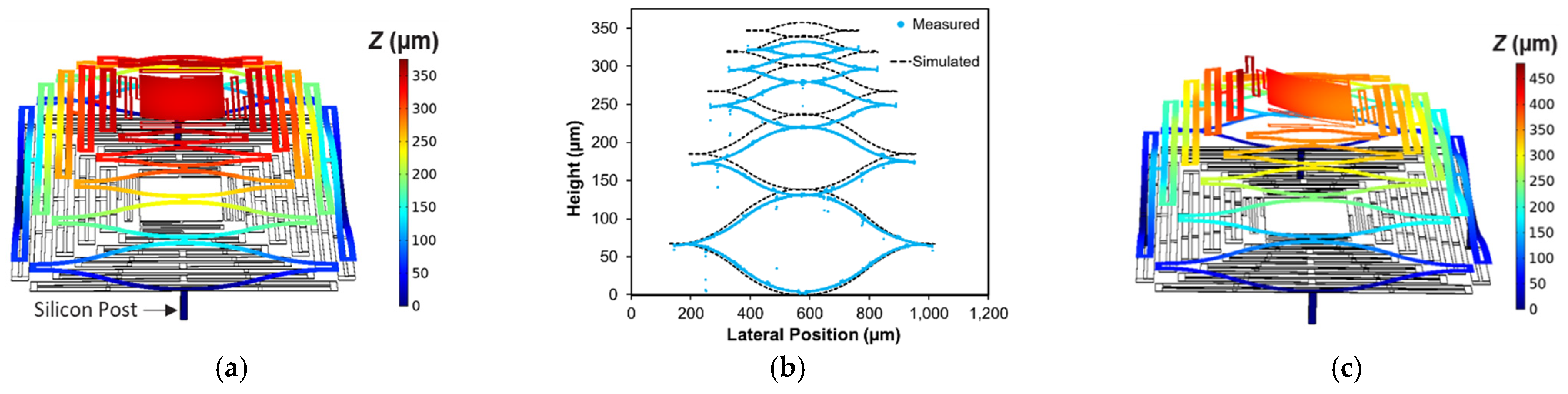
The designs examined in this study were more intricate than a single cantilever, but predicated upon the same concept. A top view of the unreleased structure without the Cr coating is shown in
Figure 2a. Each of the four serpentine polysilicon support arms were alternatively coated in Au (tensile stress) and silicon nitride (compressive stress) to create a meandering large-deformation profile in the z-axis as shown in
Figure 2b. The arms were each connected to a simple intermediate spring structure made of uncoated polysilicon which in turn was connected to a square Au-coated polysilicon central plate, which served as a broadband optical reflector. The intermediate springs were intended to help decouple motion between the arms. In order to create an asymmetric photothermal response in the presence of a centrally positioned infrared laser, which is central for these structures to serve as large-angle beam-steering devices, the Cr layer was patterned uniformly onto the surface of a single arm.
Figure 2c shows a 3D microscope intensity image constructed from a z-axis scan of a released structure, with the Cr patterned on the lower arm. The representative corresponding z-axis deformation profile is shown in
Figure 2d.
Two 5 × 5 arrays of devices were fabricated, the first with a single-arm Cr coating and the second without. In this work, we report the photothermal response for a few elements within each of these arrays to capture representative performance (both simulated and experimental). While the fabrication yield and uniformity were strong, and the structures were suitable for demonstrating the photothermal optical beam control intended, they did exhibit certain imperfections and features that are important to highlight to both provide proper context for the results and inform future related work. The first and arguably the most critical aspect to note is that the initial static deformation on the single-arm Cr-coated structures shown in
Figure 2d and
Figure 3d was not coincident with qualitative expectations. Ideally, the addition of the Cr film should both stiffen the arm that is coated and add film stresses that are counter to out-of-plane deformation, as indicated in
Figure 1. The Cr-coated arm’s resultant static out-of-plane deformation should be less than that of the other arms, resulting in a downward tilt of the plate toward the coated arm. The fabricated results shown indicate that the opposite occurred, with the coated arm being effectively less stiff. Scanning electron microscope imagery and evidence from additional test structures suggest two likely causes, which are likely coupled. These are the galvanic corrosion of the nitride layer during release (49% hydrofluoric acid (HF) immersion) and partial delamination of the Cr layer in some locations. Galvanic corrosion of polysilicon is a well-known issue in PolyMUMPs, and was effectively managed in the design of the metal and polysilicon layers for this work [
35]. However, degradation of the silicon nitride was not anticipated and seemed to be evident to some degree whenever the nitride is in direct contact with a metal layer (Au or Cr).
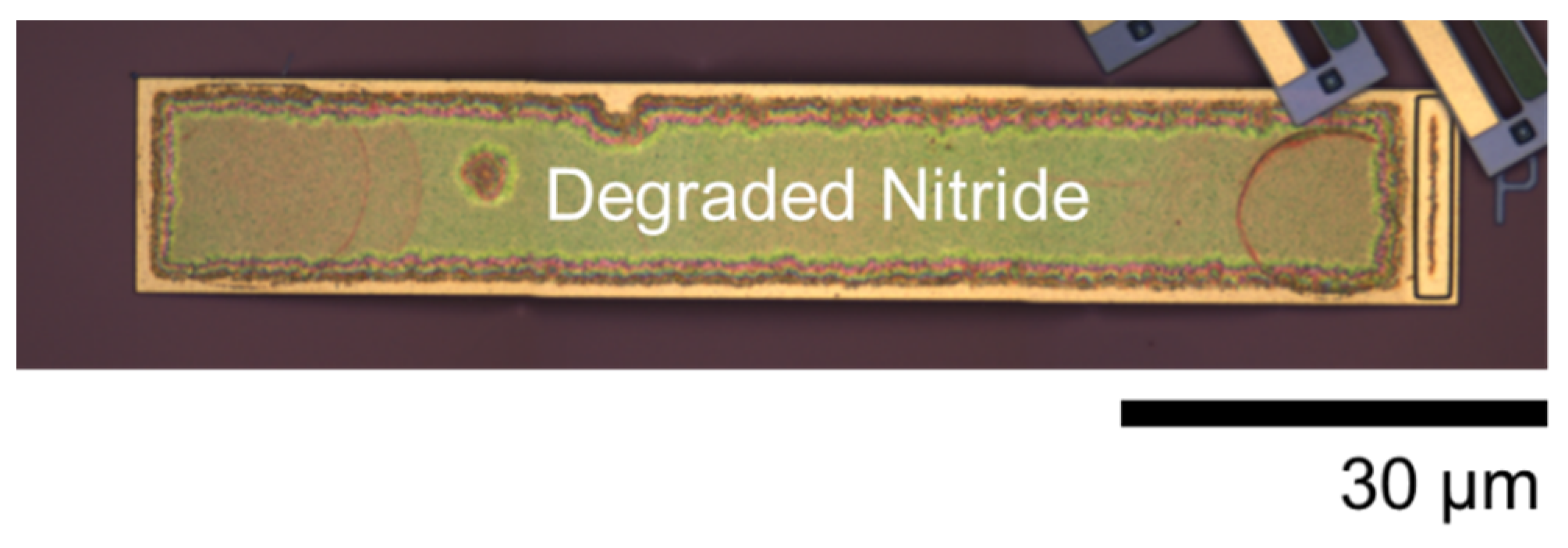
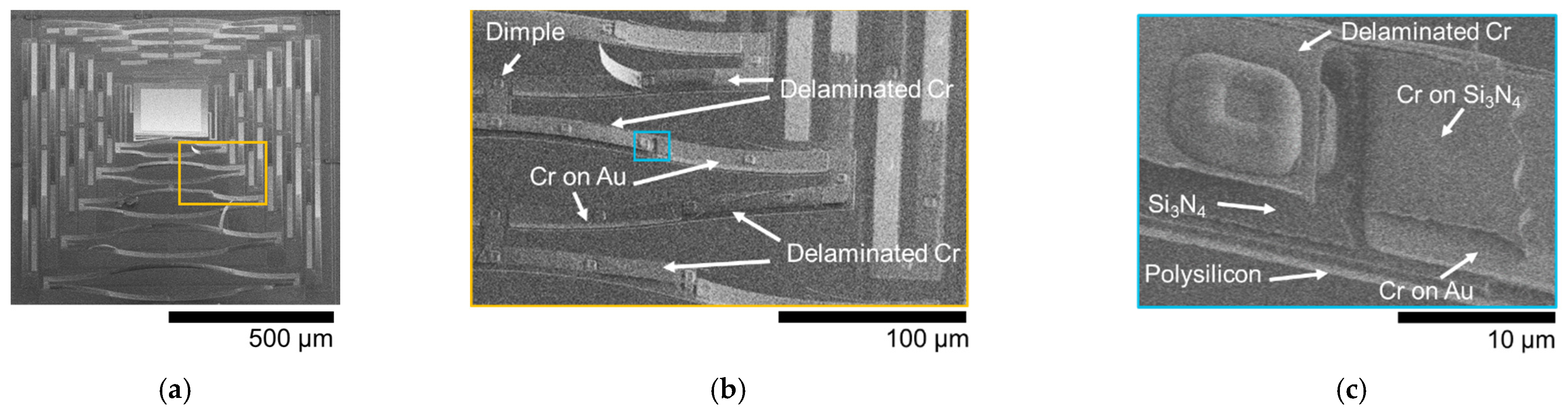
Figure 4 shows an image of a post-HF release on-chip POLY2 cantilever coated with both Au followed by silicon nitride. The image shows clear degradation (etching) of the nitride. The regions of nitride on the surface of the Au were very small and thus this effect was largely inconsequential for the uncoated arms. However, the Cr-coated arms seemed to show evidence of this degradation as well. Partial delamination of the Cr film, shown in
Figure 5, occurred exclusively on portions of the structure where the Cr was deposited on the surface of the nitride. This observation further suggests reduced adhesion due to nitride corrosion, enabling the tensile film stress inherent to the Cr film deposition to cause delamination. While both these effects are clearly undesirable, they were not significant enough to prevent comparative demonstration of photothermal beam control. They are clearly important to consider, however, for future designs, and necessitated a need to determine appropriate effective material parameters for the implementation of the representative models from which comparative simulated performance was generated, as described in the following section.
Another important feature to note for these structures (see
Figure 5a and
Figure 6) is that the central square polysilicon plate (250 µm width) with Au reflective coating (200 µm width, positioned on center), supported by the four serpentine arms, was not flat, but rather curved cylindrically (radius of curvature 700–775 µm). This cylindrical curvature is coincident with layered plate theory, specifically the nonlinear, non-symmetric elliptical deformation regime which results from the misfit strains between the films (film stress differences). Similar to the actuator arms, these stresses largely originate from the elevated deposition temperatures and the difference in thermal expansion between the films. An excellent explanation of this phenomena and relevant experimental results for near free-standing (centrally supported) gold-polysilicon square plates fabricated using the same PolyMUMPs process that is leveraged in this work is presented by Dunn et al. [
36]. This elliptical deformation involves the triggering of a highly nonlinear bifurcation response, the onset and direction of which is influenced heavily by subtle perturbations that can include variations in the geometry or heterogeneities in the materials parameters. The gold-polysilicon square plates in [
36] showed triggering of this response occurring between a larger width of 250 µm and 300 µm. The plates in this work differed in that they were not completely free standing, but connected to each of the four support arms by interconnect springs midway along each edge (highlighted in
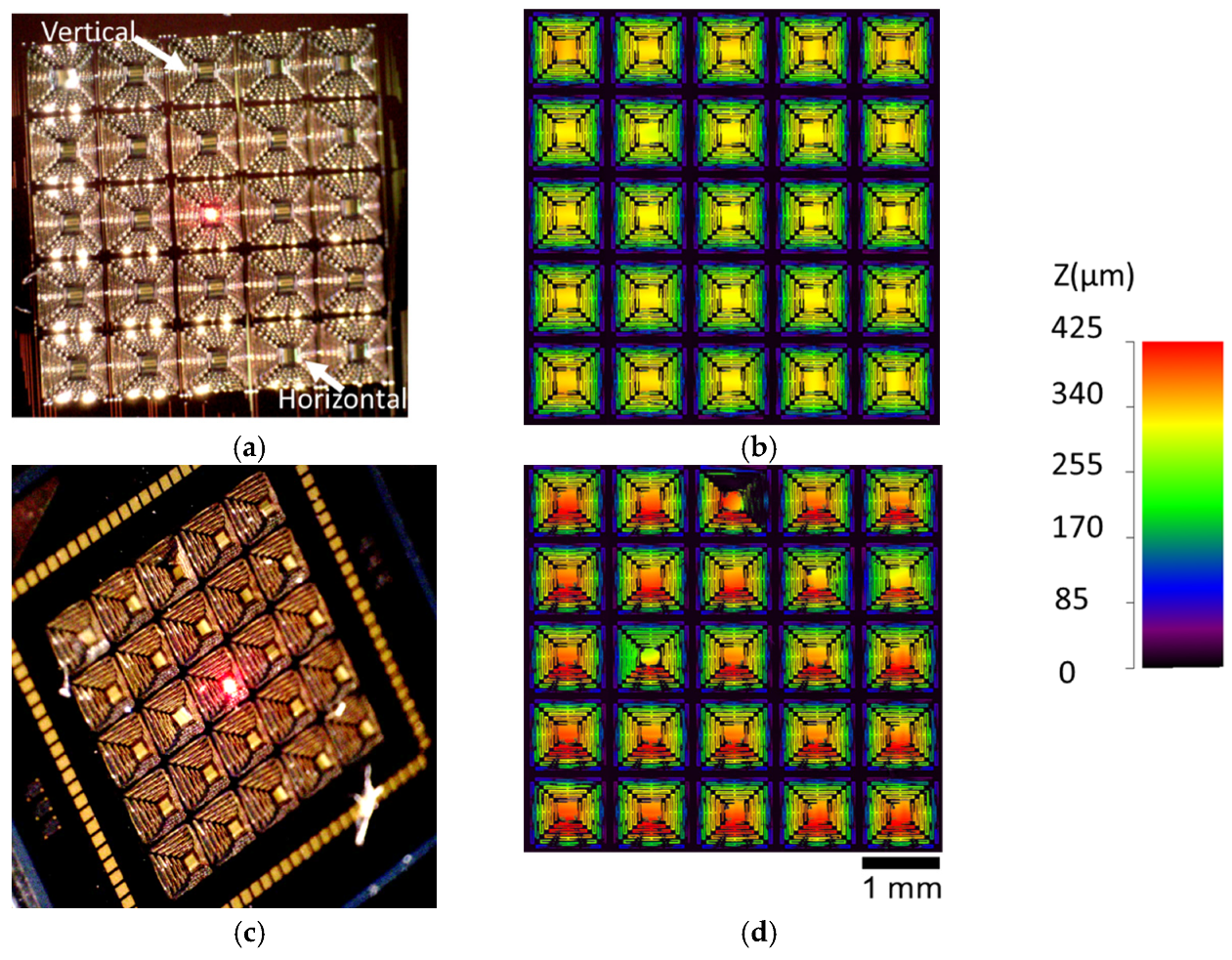
Figure 2a). These additional boundary conditions were a contributing factor for this difference in onset. Likewise, variations in the arms of these structures, which drive differences in the arm deformation, in turn acted as a major perturbation source which influenced the direction of bifurcation. As can be seen in
Figure 3a, the direction of plate bifurcation across the 5 × 5 array varied between horizontal and vertical orientations. In this study we did not seek to deliberately manage the direction or magnitude of the plate curvature, but this would be a necessary consideration for batch fabrication and is feasible through asymmetric design of the interconnecting springs and the plate itself.
Cylindrical optical reflectors can be particularly advantageous for applications like 1D-LIDAR that seek to convert a Gaussian laser beam spot into a broader line spot (for a recent example, see [
37]). The thin film-layered plate for the structure in this work would not likely be well suited for this application as it was very thin (~2 μm thick) relative to its size, making the curvature sensitive to temperature changes. Instead, this temperature sensitivity was a feature we exploited to show the simultaneous photothermal, optical beam-shaping capability in addition to large-angle beam steering, with the suggestion that each of these can be designed in a largely decoupled fashion.
Lastly, the subtractive patterning of the silicon nitride layer employed an etch chemistry that was not selective with respect to polysilicon, so the uncoated polysilicon regions of the structure, namely the interconnect springs, were also susceptible to etching once the nitride was removed. Contact profilometry performed indicated that these regions were etched at approximately 600 nm (~40% thickness reduction), reducing the effective stiffness of these springs. The simulations detailed in the following section incorporated this effect, although it was determined that the impact on steady-state piston and tilt displacements was minor. Nevertheless, this non-uniformity in etching is another source of perturbation variation for the aforementioned plate bifurcation and would impact the dynamic response (not examined in this work).
5. Results and Discussion
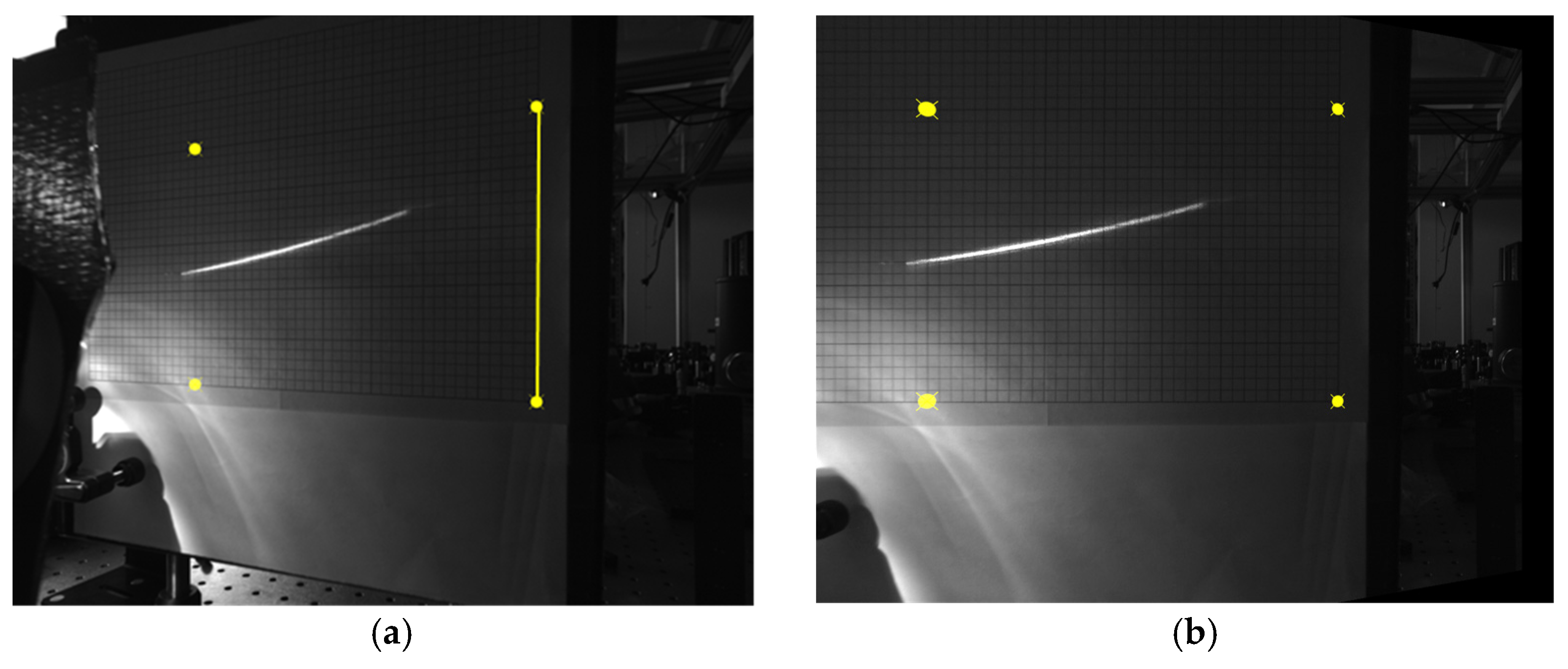
Experimental characterization of the photothermal response was performed on several structures, with results from two baseline (devices A and B) and two single-arm Cr-coated (devices C and D) structures reported in this article. These devices differed in their initial plate bifurcation, with A and C being cylindrically curved in the vertical direction and B and D being cylindrically curved in the horizontal direction. This section presents the full datasets for devices A and C corresponding to the test flows shown in
Figure 9 and the images in
Figure 2. The test flows and corresponding complete datasets for devices B and D are provided in the
Supplementary Materials (Figures S1–S3). Videos of the laser spot data on screen and of the devices themselves are also provided in the
Supplementary Materials (Videos S1–S3) for a select example test point.
The angular (tilt) response for the two baseline structures was similar in magnitude but differed in direction.
Figure 12a–g summarize the results for device A.
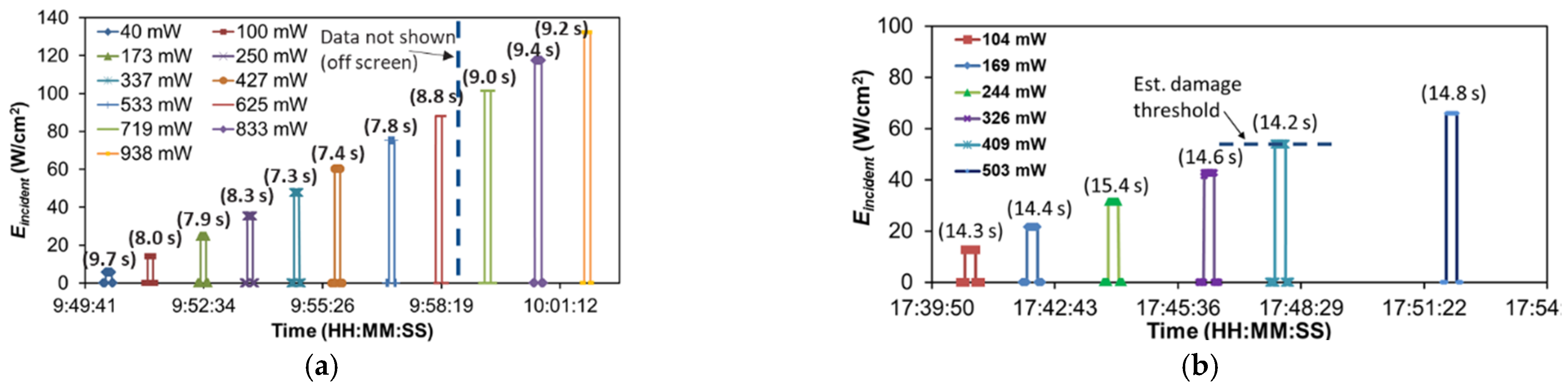
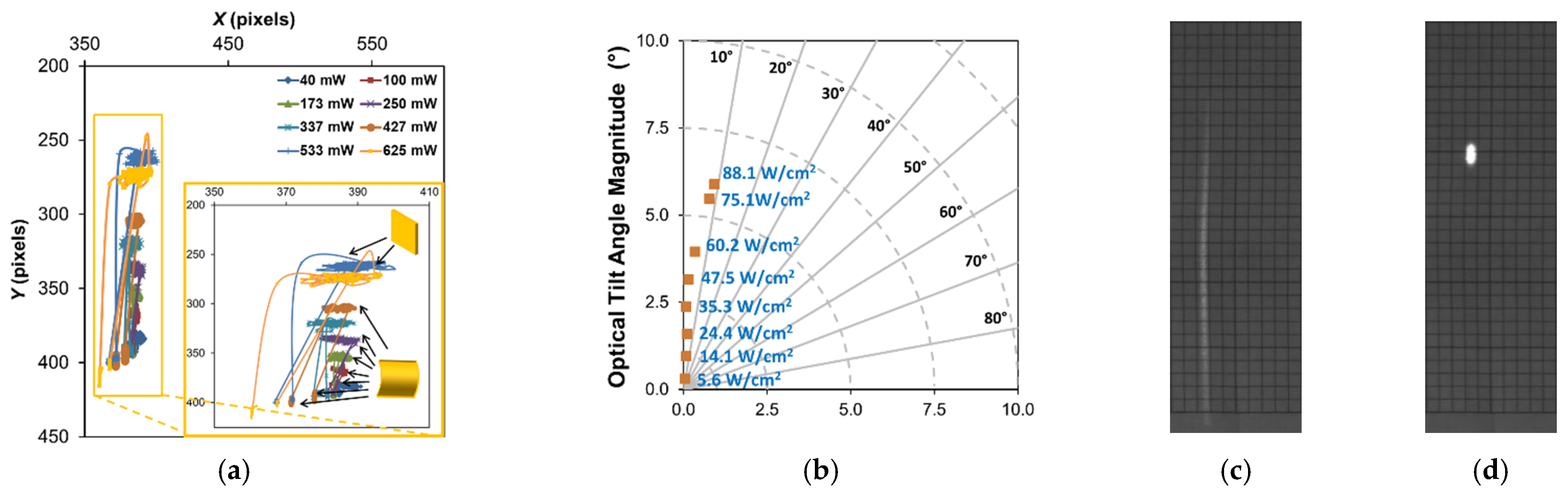
Figure 12a shows the calculated laser spot position on the screen for every frame for each test run. The results show clear tilt motion, preferentially in one direction (toward the top of the screen) as infrared irradiance is increased, with some cross-axis coupling (lateral motion) at higher laser powers shown in
Figure 12b. Since the support arms were all uncoated, the differing preference in tilt direction can be attributed to a combination of the asymmetric deformation of the central plate and interconnect supports, as well as imperfect positioning of the beam. For device A, a maximum mechanical tilt, averaged across a single exposure, of ~3° (6° optical) was shown for 75 W/cm
2, with position relaxing slightly at 88.1 W/cm
2. This decreased motion for the higher exposure irradiance was possibly due to a reduction in Au film stress from thermal annealing. device B (shown in
Figure S2) yielded a similar response in a lateral direction with a maximum mechanical tilt of ~3.65° (7.3° optical) for 74.2 W/cm
2 , which was the maximum power response successfully captured (a higher exposure of 87.8 W/cm
2 was performed but the response exceeded the limits of the screen). While there was clearly some significant tilt burn-in effects (i.e., plastic deformation resulting from the infrared exposures, evident in
Figure 12a), pre- and post-imaging comparison (not shown) suggested no damage to the structural profile post-testing. Both the center height position and the radius of curvature of the plate remained unchanged and the differences in both central plate tip and tilt angles were <0.1°. Thermomechanical burn-in has been studied before, specifically for Au on polysilicon plate structures, by Gall et al. [
49], and thus it is not surprising to see some burn-in response in these large-deformation structures that are dependent in part on the stress in the Au layer. Lastly, as each exposure increased in power, there was clearly some drift observed in the position on the beam during the exposure. This drift suggests a slow temperature rise, most likely inherent to the local thermal boundary conditions changing, the most significant being heating of the substrate.
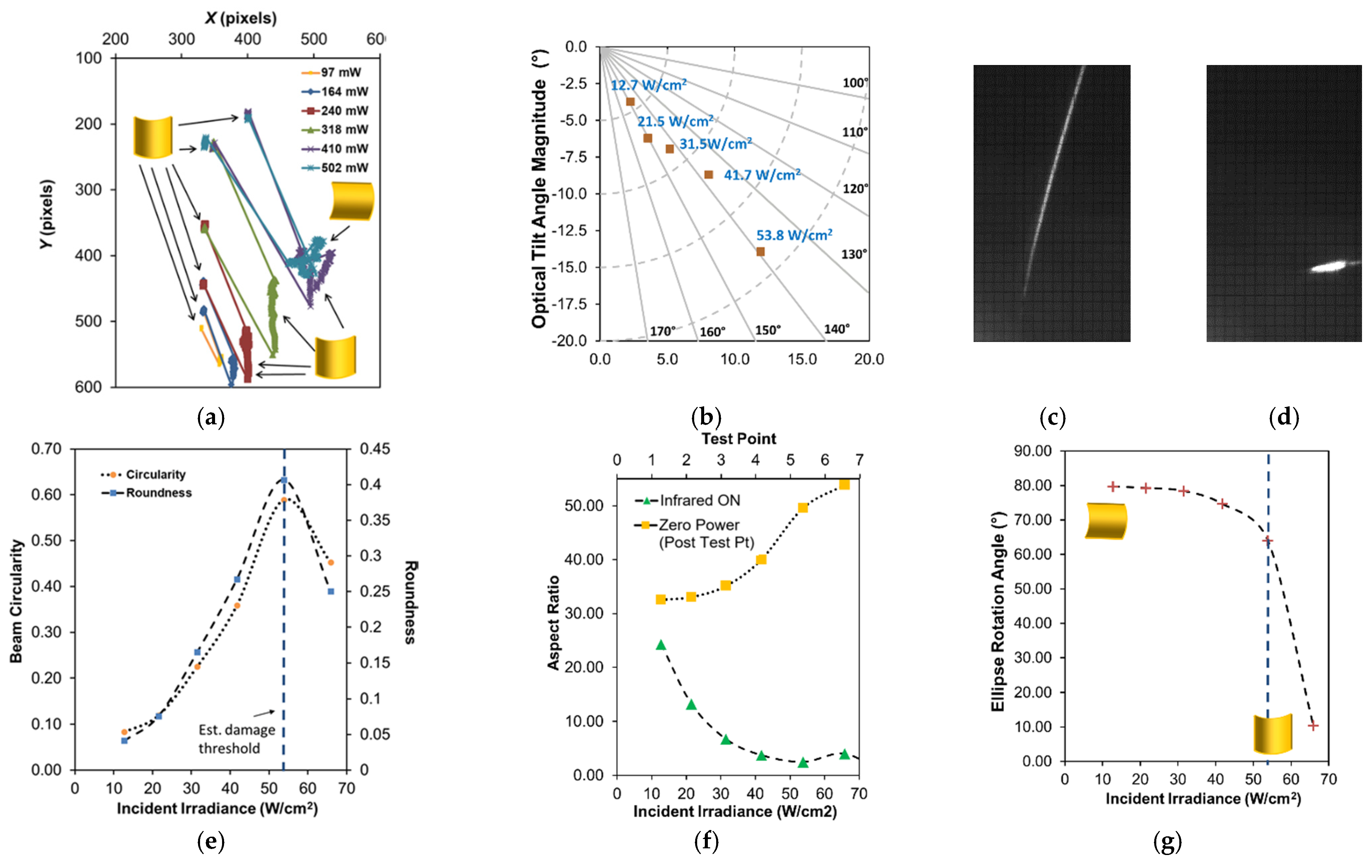
The results for single-arm Cr-coated structures are shown in
Figure 13 (device C) and
Figure S3 (device D). Overall, these structures exhibited a larger magnitude tilt response, in comparison to the baseline structure, towards the direction of the coated arm, as shown in
Figure 14 and
Figure S4, which was coincident with the designed thermal absorption asymmetry. They also exhibited a much larger degree of burn-in motion (see
Figure 13a,
Figure 14, and
Figure S4b) and drift motion during exposure, likely due to both longer exposure times (40–50% longer in comparison to baseline) and the aforementioned flaws in the Cr coating, namely localized delamination, allowing for increased localized heating and additional plastic deformation. Higher power exposures did eventually lead to twisting and warping of the coated arm, verified by imaging post-experiment. While this damage onset was not immediately obvious from the direct observation of the device, examination of the post-processed data showed the onset of aberrant cross-axis drift motion and burn-in of the spot.
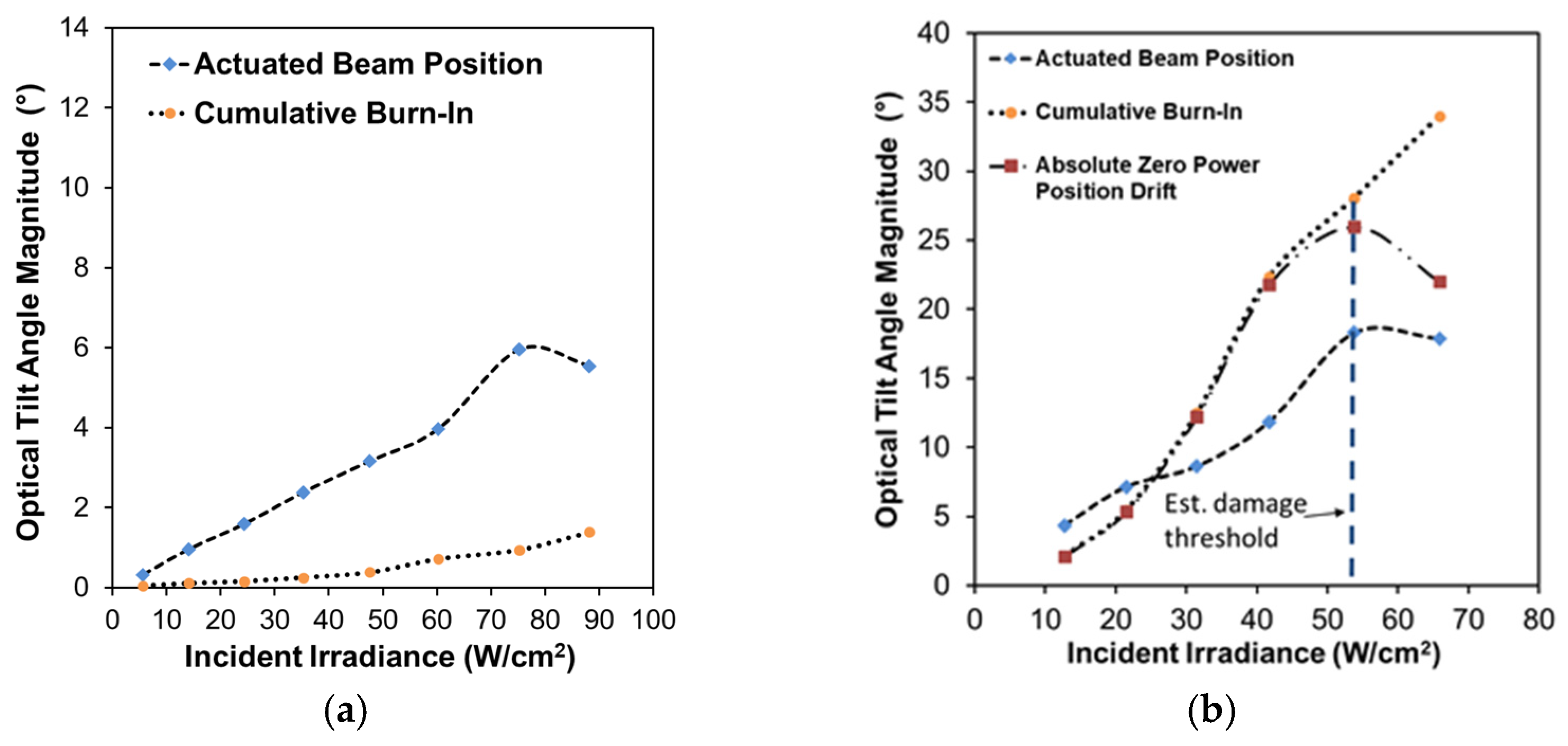
One way to quantify this damage effect is by comparing the deviation of the cumulative burn-in position to the absolute burn-in position in optical tilt angle magnitude, as shown in
Figure 14b and
Figure S4b. The cumulative burn-in is the cumulative summation of burn-in observed for all exposures before and including the given exposure test point. The absolute burn-in is the absolute spot distance relative to the initial spot position observed at the beginning of the experiment before any exposures were performed. Deviations between these two values indicate there is a change in the direction of the burn-in motion, which suggests twisting deformation damage of the structure is occurring. The maximum mechanical tilt observed for device C, prior to (or perhaps at) the onset, was ~9.15° (18.3° optical) for 53.8 W/cm
2. Device D (shown in
Figure S3) was very similar in magnitude, although with less cross-coupled motion (a ~12° vs. ~40° off-perpendicular screen in-plane trajectory), yielding a ~8.65° (17.3° optical) maximum tilt angle at 53.7 W/cm
2. While the steady-state simulation results in
Section 3 agree qualitatively, in terms of the general direction of the response, these measured tilt magnitudes are much larger in comparison, suggesting that the effective parameters used to capture the initial deformation are not well-suited for the complete photothermal response.
The corresponding observed laser spot shape responses for both baseline structures (
Figure 12e–g and
Figure S3e–g) and the single-arm Cr-coated structures (
Figure 13e–g and
Figure S3f–h) was qualitatively consistent with expectations associated with heating of layered plates. The expected thermomechanical response for a centrally anchored metal-coated plate, as described by Dunn et al. [
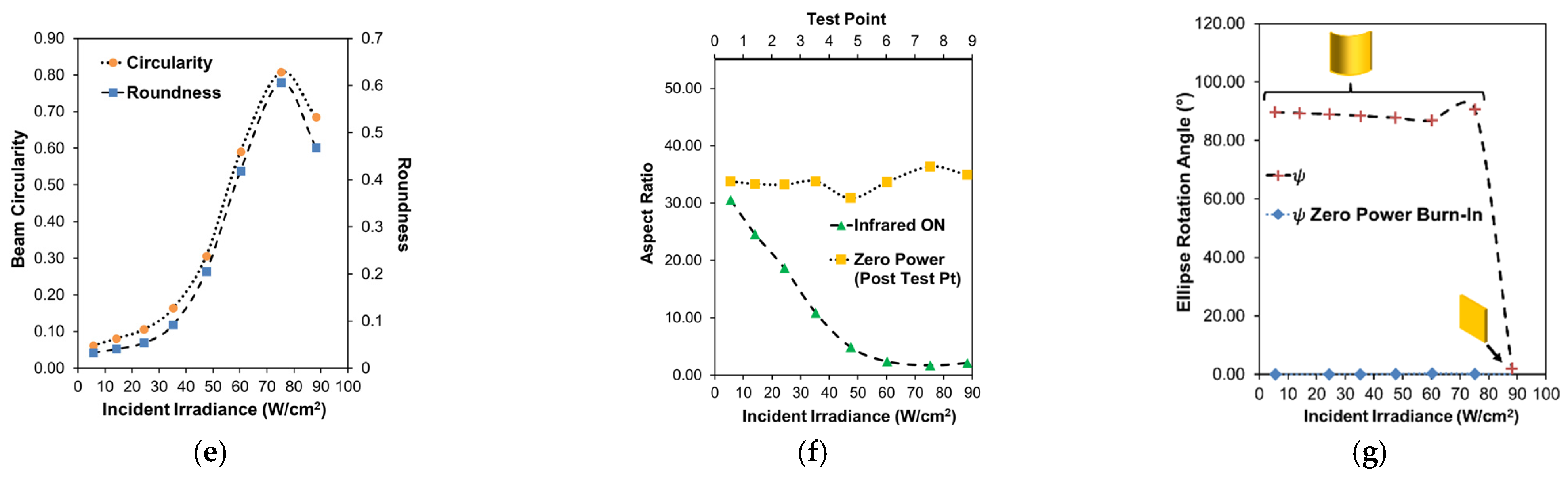
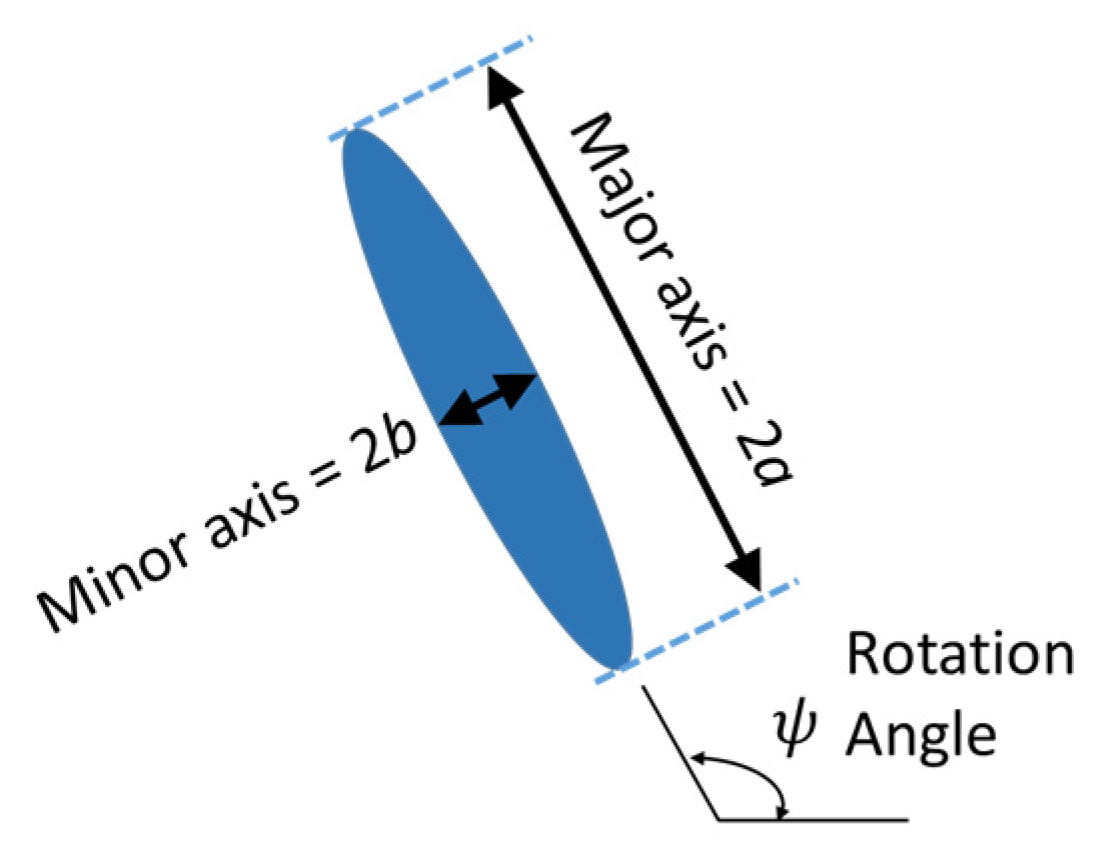
36], would be a deformation transition from a convex to concave deformation as the plate temperature is increased. In all structures, the beam shape consistently became more circular as the irradiance increased, per the circularity and roundness plots (
Figure 12e,
Figure 13e,
Figures S2e and S3h), which implies flattening of the central plate due to a relaxation of the Au thermal stress. This trend was consistent for the baseline structures, although there was some small deviation in the circularity, roundness and rotation angles produced from the ellipsoid fitting at elevated irradiances (
Figure 12e,g and
Figure S2h), possibly from some asymmetric plate anchor loading with the surrounding interconnect and support arms impeding the plate deformation. However, for the Cr-coated structures, there was an abrupt change in the orientation of the spot ellipsoid (see rotation angle plots in
Figure 13c,d and
Figure S3d) that occurred in the structures before the estimated damage thresholds. This change in rotation angle corresponded to a change in the direction of the center plate bifurcation, likely due to exaggerated asymmetry of the edge anchor loading of the plate to the support arms triggering the bifurcation to “snap” in the opposite direction. This behavior seemed to be independent of the initial direction as devices C and D were each initially oriented opposite each other and it occurred in both. The plots in
Figure 12f,
Figure 13f,
Figures S2f and S3gt both the aspect ratio of the laser spot during illumination of a given exposure (green triangles) and the aspect ratio of the laser spots after illumination (yellow squares). The intent is to portray any permanent distortion of the laser spot shape, which would indicate plate deformation (i.e., burn-in) of the central plate. For both the baseline structures, there was no significant burn-in effect associated with the beam shape (plate curvature) per the aspect ratio plots (
Figure 12f and
Figure S2f). However for the single-arm Cr-coated structures, there was some drift in the zero power aspect ratio (
Figure 13f and
Figure S3h). Since beam shape burn-in was completely absent in the baseline structures, the burn-in observed was most likely a consequence of asymmetric burn-in deformation occurring in the support arms of the single-arm Cr-coated structure rather than the plate itself.
While this experiment could not measure piston motion directly, significant piston motion was clearly evident from the device video recordings for all structures tested (see
Video S1). The response was consistently observed when the power was fixed and the laser was moved across the elements of the uncoated array. It is also worth noting that the intended tilt behavior of the single-arm coated structures could be altered through deliberate off-center alignment of the incident beam, although we do not present these results.
6. Conclusions
The results presented in this article clearly show that large-deformation thin-film structures have the ability to be actuated for significant tilt angles remotely through the use of infrared laser illumination. Deliberate tilt actuation was demonstrated for symmetric structures using inherent imperfections in the off-center beam position, although the exact positioning of the beam offset was not measureable with the test setup employed. Alternatively, we demonstrated that a more responsive tilt actuation can also be generated through deliberate application of asymmetric infrared absorption across the structure in the presence of a fixed, centrally positioned laser beam. The latter exhibited significantly more (5–10× in comparison to the uncoated baseline) burn-in (plastic non-recoverable) deformation, albeit with longer exposure times (40–50% longer), than the baseline comparison cases. This burn-in effect can be largely attributed to accentuated localized heating from film defects (namely delamination) of the metal infrared absorber layer causing a greater degree of both film annealing and thermomechanical deformation.
A more exhaustive investigation involving device response cycling and full hysteresis testing remains to be accomplished for these structures, but the current data and responses observed suggest that at lower powers the response may be repeatable for a fixed exposure time. Burn-in is something that is common to encounter in both microsystems and microelectronics and is often accommodated through in-situ or externally applied pre-heat treatment (annealing). For applications that may seek to reduce this burn-in effect, one clear approach would be employing a thinner Cr coating or perhaps an alternate material that will have less coupling to the structural stiffness without compromising absorption or the desired photothermal response. In additional, tensile thin films other than metal may be employed to reduce or even eliminate the known burn effects associated with annealing of ductile metal films, such as the Au employed here. Targeted design of these types of structures for steady-state photothermal response operation requires careful consideration of the films used and the geometry employed to manage photothermal sensitivity, total range of motion and nonlinear effects, such as burn-in of the structures. The photothermal response of these structures was demonstrated at power levels that would be considered high for many applications, but the potential to tailor for a lower power response remains possible through targeting structures with lower effective stiffness with coatings that promote higher infrared absorption.
Design of structures similar to these for beam steering/shaping applications demands the ability to generate accurate predictions of their behavior. Ultimately, the simulations developed in this study are effective for qualitative comparison and concept demonstration, but are insufficient for accurate prediction of deformation profiles, coupled photothermal response or accommodation of nonlinear effects such as burn-in. Capturing these effects appears to be possible with existing multiphysics tools but remains an area to be fully explored.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}