
A Static Friction Model for Unlubricated Contact of Random Rough Surfaces at Micro/Nano Scale

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Modeling
2.1. Spherical Contact Friction Model Based on the Interfacial Potential Barrier Theory
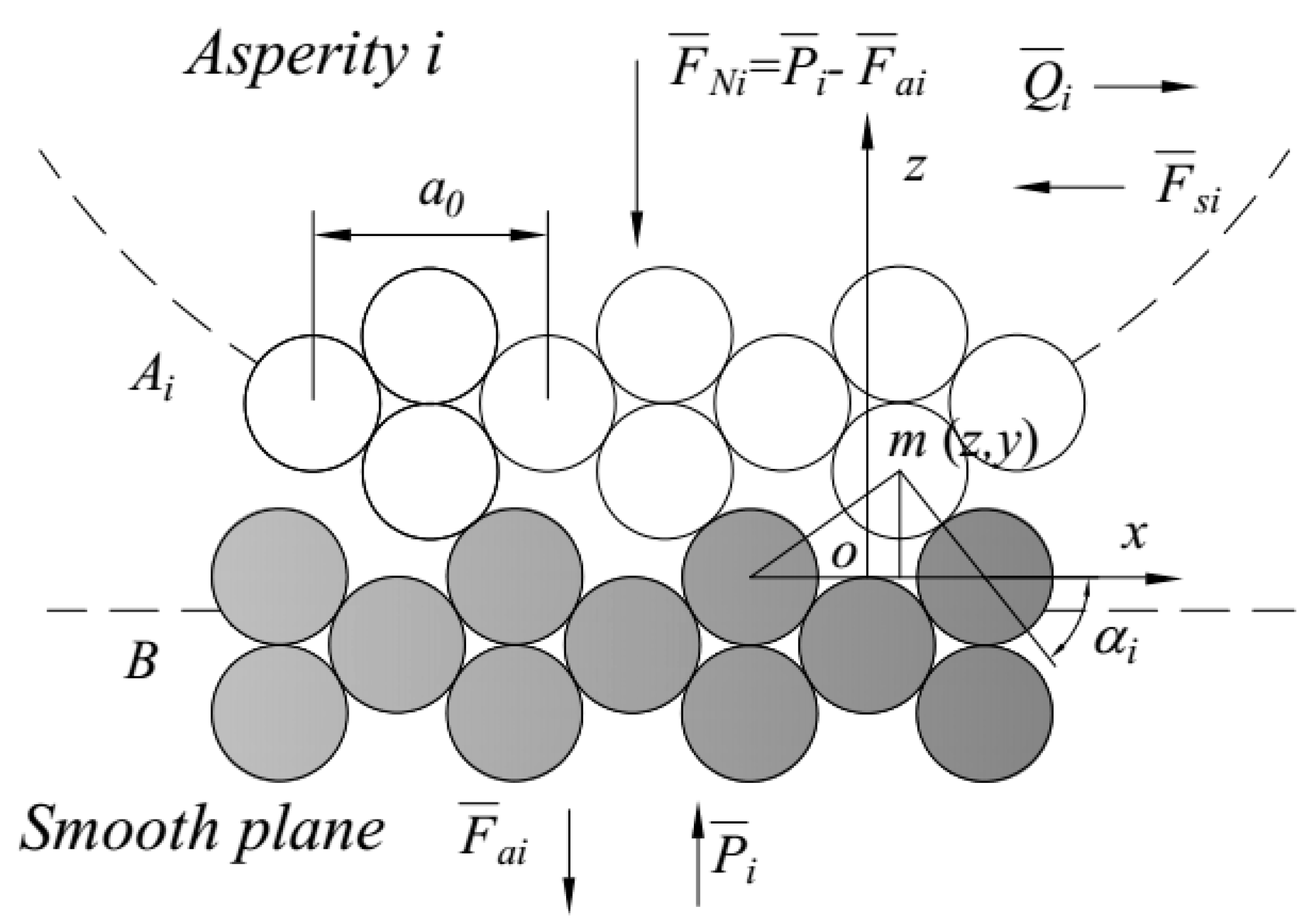
2.2. Multi-Asperities Contact
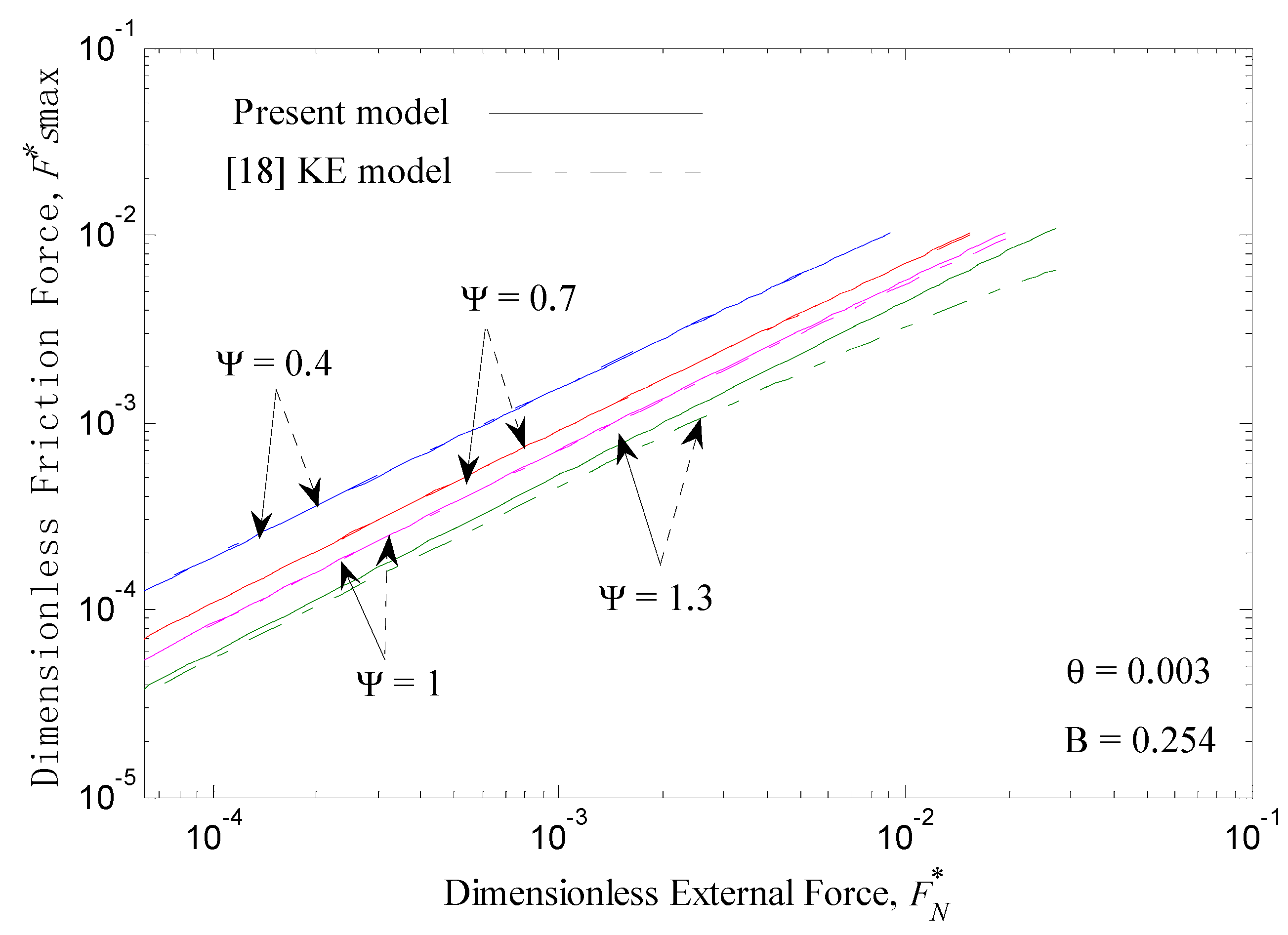
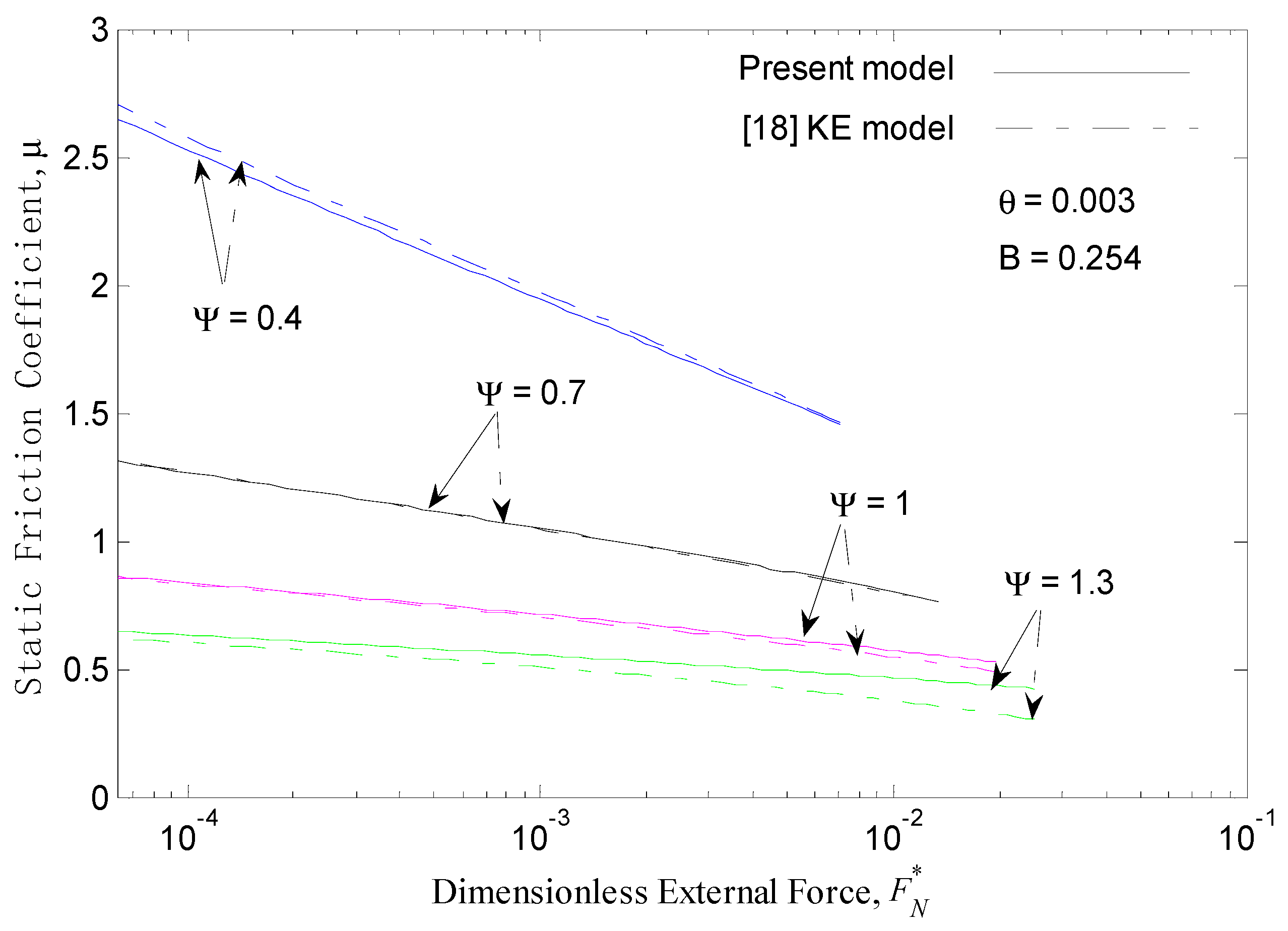
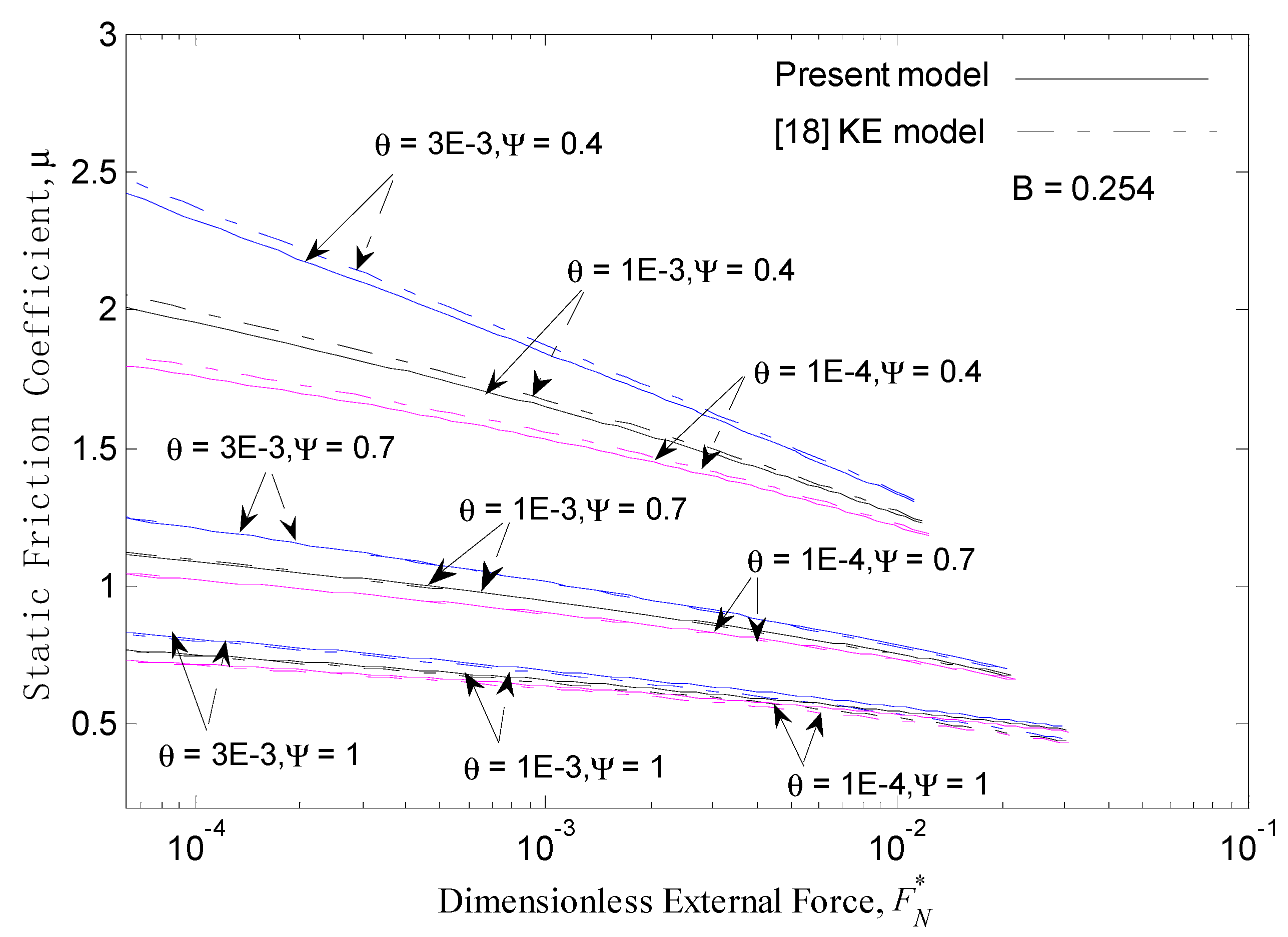
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| lattice constant | |
| real contact area | |
| nominal contact area | |
| statistical coefficient of positional correlation | |
| external normal force | |
| static friction force | |
| external normal force | |
| temperature coefficient | |
| separation based on surface heights | |
| position commensurate coefficient | |
| hardness factor, | |
| external normal force | |
| asperity radius of curvature | |
| height of an asperity measured from the mean of asperity heights | |
| surface roughness parameter, | |
| energy of adhesion | |
| interfacial potential difference | |
| adhesion energy of contact interface | |
| distribution function of asperity heights | |
| area density of asperities | |
| static friction coefficient | |
| Poisson’s ratio of the softer material | |
| dimensionless adhesion parameter | |
| standard deviation of surface heights | |
| standard deviation of asperity heights | |
| interference | |
| critical interference at the inception of plastic deformation | |
| plasticity index | |
| superscript | |
| dimensionless | |
References
- Albertini, G.; Karrer, S.; Grigoriu, M.D.; Kammer, D.S. Stochastic Properties of Static Friction. J. Mech. Phys. Solids 2021, 147, 104242. [Google Scholar] [CrossRef]
- Koji, U.; Rice, J.R. Universal nucleation length for slip-weakening rupture instability under nonuniform fault loading. J. Geophys. Res. 2003, 108, 2042. [Google Scholar]
- Krim, J. Friction and energy dissipation mechanisms in adsorbed molecules and molecularly thin films. Adv. Phys. 2012, 61, 155–323. [Google Scholar] [CrossRef]
- Stoyanov, P.; Chromik, R. Scaling Effects on Materials Tribology: From Macro to Micro Scale. Materials 2017, 10, 550. [Google Scholar] [CrossRef]
- Kmka, B.; Pvs, B.; As, B. Tribology of Silicon Surfaces: A review. Mater. Today Proc. 2018, 5, 24809–24819. [Google Scholar]
- Braun, O.M.; Naumovets, A.G. Nanotribology: Microscopic mechanisms of friction. Surf. Sci. Rep. 2006, 60, 79–158. [Google Scholar] [CrossRef]
- Greenwood, J.A.; Williamson, J.B.P. Contact of Nominally Flat Surfaces. Proc. R. Soc. A Math. Phys. Eng. Sci. 1966, 295, 300–319. [Google Scholar]
- Kogut, L.; Etsion, I. Elastic-Plastic Contact Analysis of a Sphere and a Rigid Flat. J. Appl. Mech. 2002, 69, 657–662. [Google Scholar] [CrossRef]
- Cohen, D.; Kligerman, Y.; Etsion, I. A Model for Contact and Static Friction of Nominally Flat Rough Surfaces under Full Stick Contact Condition. J. Tribol. 2008, 130, 117–139. [Google Scholar] [CrossRef]
- Li, L.; Etsion, I.; Talke, F.E. Contact Area and Static Friction of Rough Surfaces with High Plasticity Index. J. Tribol. 2010, 132. [Google Scholar] [CrossRef]
- Krim, J.; Solina, D.H.; Chiarello, R. Nanotribology of a Kr monolayer: A quartz-crystal microbalance study of atomic-scale friction. Phys. Rev. Lett. 1991, 66, 181. [Google Scholar] [CrossRef]
- Xu, Z.; Ping, H. Study on the energy dissipation mechanism of atomic-scale friction with composite oscillator model—ScienceDirect. Wear 2007, 262, 972–977. [Google Scholar] [CrossRef]
- Liebsch, A.; Gonçalves, S.; Kiwi, M. Electronic versus phononic friction of xenon on silver. Phys. Rev. B 1999, 60, 5034–5044. [Google Scholar] [CrossRef]
- Shengguang, Z.; Ping, H. Calculation Model of Friction Force of Nano-Scale Rough Surface on the Basis of LJ Potential and Stochastic Processes. J. South China Univ. Technol. Nat. Sci. Ed. 2016, 44, 55–60. [Google Scholar]
- Xu, Z.; Ding, L.; Huang, P. Interfacial potential barrier theory of friction and wear. Front. Mech. Eng. China 2008, 003, 276–282. [Google Scholar] [CrossRef]
- Gaus, N.; Proppe, C.; Zaccardi, C. Modeling of dynamical systems with friction between randomly rough surfaces. Probabilistic Eng. Mech. 2017, 54, 82–86. [Google Scholar] [CrossRef]
- Chang, W.-R.; Etsion, I.; Bogy, D. Static friction coefficient model for metallic rough surfaces. J. Tribol. 1988, 110, 57–63. [Google Scholar] [CrossRef]
- Kogut, L.; Etsion, I. A static friction model for elastic-plastic contacting rough surfaces. J. Tribol. 2004, 126, 34–40. [Google Scholar] [CrossRef]
- Zhao, Y.; Maietta, D.M.; Chang, L. An Asperity Microcontact Model Incorporating the Transition from Elastic Deformation to Fully Plastic Flow. J. Tribol. 2000, 122, 86–93. [Google Scholar] [CrossRef]
- Majumdar, A.; Bhushan, B. Fractal Model of Elastic-Plastic Contact between Rough Surfaces. J. Tribol. Trans. Asme 1991, 113, 1–11. [Google Scholar] [CrossRef]
- Pan, W.; Li, X.; Wang, L.; Guo, N.; Mu, J. A normal contact stiffness fractal prediction model of dry-friction rough surface and experimental verification. Eur. J. Mech. A Solids 2017, 66, 94–102. [Google Scholar] [CrossRef]
- Xiao, B.; Huang, Q.; Wang, Y.; Chen, H. A fractal model for capillary flow through a single tortuous capillary with roughened surfaces in fibrous porous media. Fractals 2021, 29, 2150017. [Google Scholar] [CrossRef]
- Greenwood, J.A.; Tripp, J.H. The Contact of Two Nominally Flat Rough Surfaces. Proc. Inst. Mech. Eng. 1970, 185, 625–634. [Google Scholar] [CrossRef]
- James, H.R.; Smith, J.R.; Ferrante, J. Universal features of bonding in metals. Phys. Rev. B 1983, 28, 1835–1845. [Google Scholar]
- Israelachvili, J.N. Adhesion, Friction and Lubrication of Molecularly Smooth Surfaces. In Fundamentals of Friction: Macroscopic and Microscopic Processes; Springer: Dordrecht, The Netherlands, 1992. [Google Scholar]
- Smith, J.R.; Perry, T.; Banerjea, A.; Ferrante, J.; Bozzolo, G. Equivalent crystal theory of metal and semiconductor surface and defects. Phys. Rev. B 1991, 44, 6444–6465. [Google Scholar] [CrossRef]
- Xu, Z.; Huang, P. Study on Interfacial Potential Barrier Theory of Friction and Wear. Tribology 2007, 27, 54–59. [Google Scholar]
- Rankin, J.S. LXXIII. The elastic range of friction. Philos. Mag. 1957, 2, 806–816. [Google Scholar] [CrossRef]
- Gnecco, E.; Bennewitz, R.; Gyalog, T.; Meyer, E. Friction experiments on the nanometer scale. J. Phys. Condens. Matter 2001, 13, R619–R642. [Google Scholar] [CrossRef]
- Kogut, L.; Etsion, I. A Finite Element Based Elastic-Plastic Model for the Contact of Rough Surfaces. Tribol. Trans. 2003, 46, 383–390. [Google Scholar] [CrossRef]
- McCool, J.I. Predicting Microfracture in Ceramics via a Microcontact Model. J. Tribol. 1986, 108, 380. [Google Scholar] [CrossRef]
- So, M.R.; Jacobsen, K.W.; Stoltze, P. Simulations of atomic-scale sliding friction. Phys. Rev. B 1996, 53, 2101–2113. [Google Scholar]
- Etsion, I.; Amit, M. The Effect of Small Normal Loads on the Static Friction Coefficient for Very Smooth Surfaces. J. Tribol. 1993, 115, 406. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, S.; Ni, L. A Static Friction Model for Unlubricated Contact of Random Rough Surfaces at Micro/Nano Scale. Micromachines 2021, 12, 368. https://doi.org/10.3390/mi12040368
Zhu S, Ni L. A Static Friction Model for Unlubricated Contact of Random Rough Surfaces at Micro/Nano Scale. Micromachines. 2021; 12(4):368. https://doi.org/10.3390/mi12040368
Chicago/Turabian StyleZhu, Shengguang, and Liyong Ni. 2021. "A Static Friction Model for Unlubricated Contact of Random Rough Surfaces at Micro/Nano Scale" Micromachines 12, no. 4: 368. https://doi.org/10.3390/mi12040368
APA StyleZhu, S., & Ni, L. (2021). A Static Friction Model for Unlubricated Contact of Random Rough Surfaces at Micro/Nano Scale. Micromachines, 12(4), 368. https://doi.org/10.3390/mi12040368