
Research in Nonlinearity of Surface Acoustic Wave Devices

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Importance of Study on Nonlinear Effects in Surface Acoustic Wave Devices
- (1)
- Signal quality degradation: The main feature of signal quality is the specification of Error Vector Magnitude. This norm is used to measure the distance between the constellation points of the actual signal and its ideal position (the ideal position refers to the position of the constellation from which the signal is sent by the ideal transmitter or received by the ideal receiver).
- (2)
- New Spectrum Generation: Harmonics, second-order intermodulation distortion (IMD2), third-order intermodulation distortion (IMD3), and adjacent channel leakage ratio are the most common criteria used to evaluate the severity of spectral increase.
- (3)
- Desensitization: Desensitization is defined as the loss of receiver sensitivity due to the presence of Tx signals. The causes of Rx desensitization may be:
- (A)
- Rx noise generated by power amplifiers;
- (B)
- Tx leaks into the receiver due to the limited isolation of Tx and Rx, resulting in DC and RF frequency components falling into the receiving band of the direct-conversion receiver;
- (C)
- IMD2 and IMD3 fall in the Rx frequency band in the duplexer, thus reducing the SNR of the receiver. These IMDs are caused by intermodulation between Tx signals and external jamming signals (Jammers).
2. Generation Mechanism of Nonlinearity
3. Simulation Method of Nonlinearity in SAW Devices
3.1. Phenomenological Models
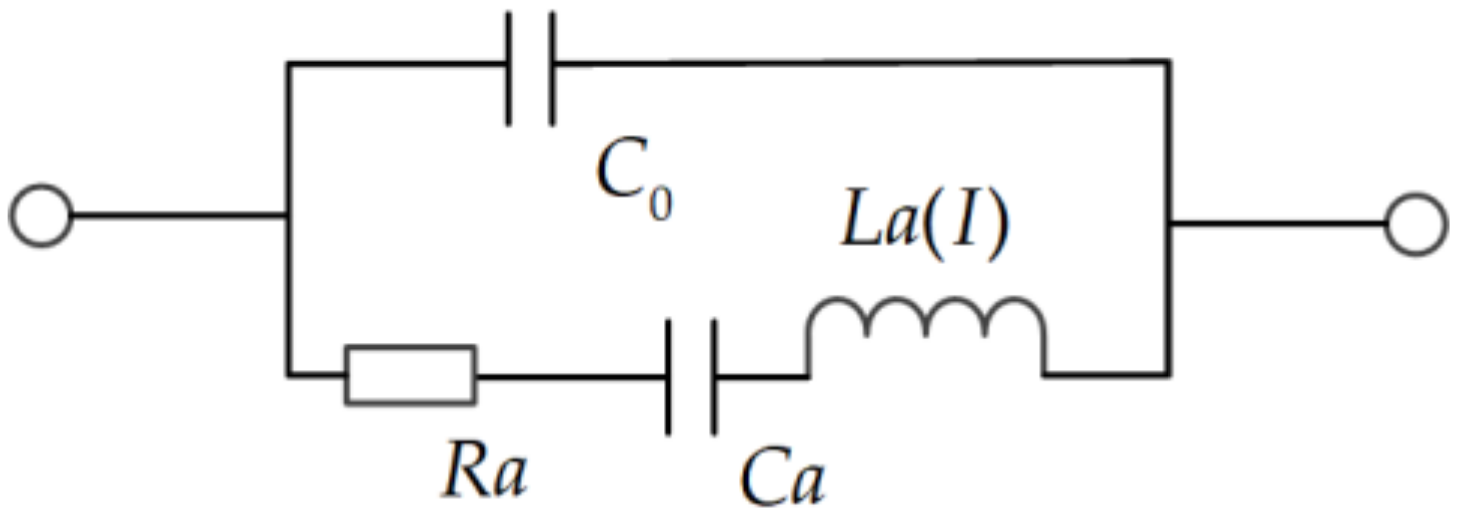
3.1.1. Nonlinear BVD Model
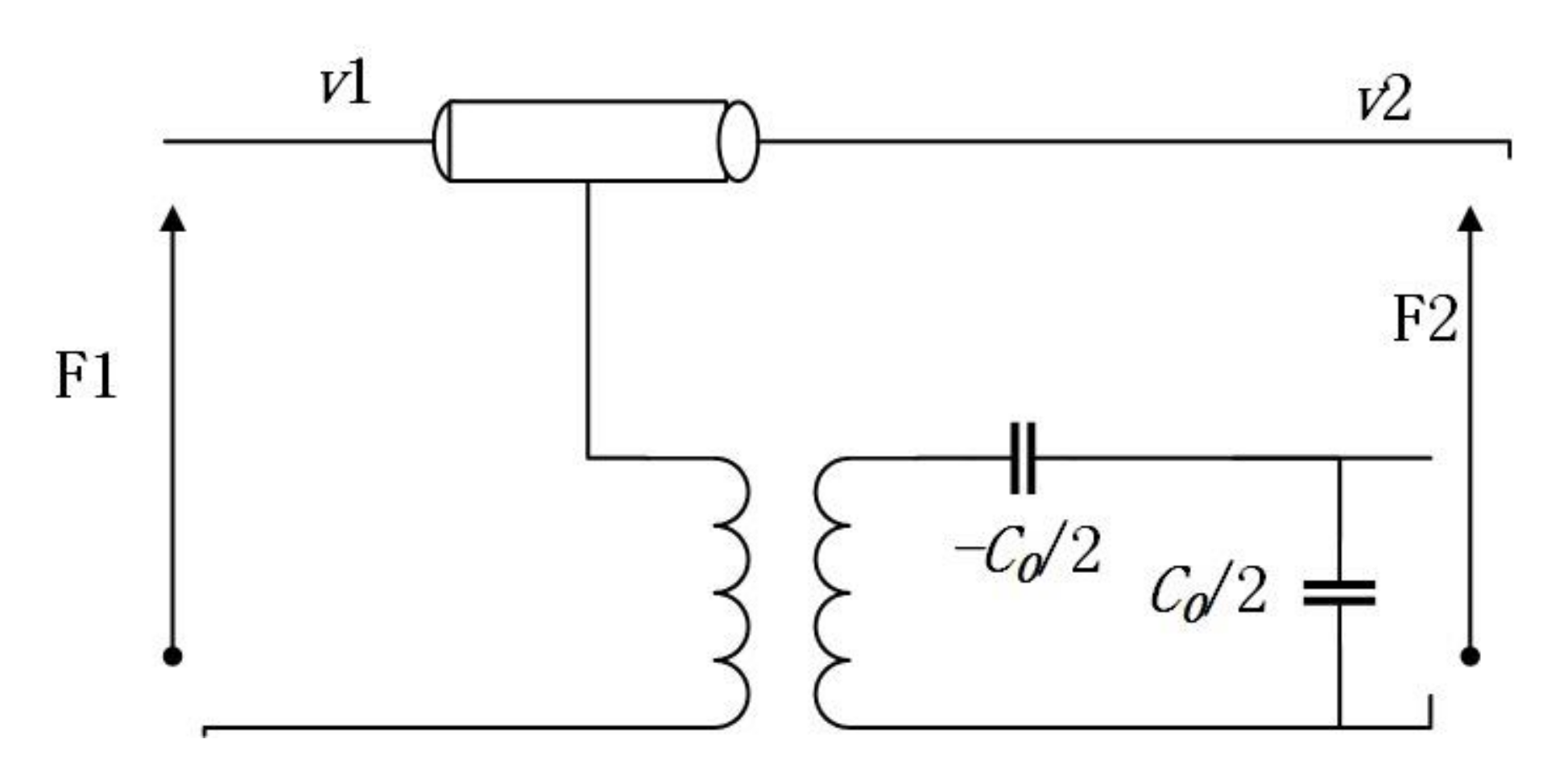
3.1.2. Nonlinear Mason Equivalent Circuit Model
3.1.3. Nonlinear P Matrix Model
3.1.4. Nonlinear COM Model
3.1.5. Nonlinear Rigorous COM and P Matrix Approach
3.1.6. Other Nonlinear Models
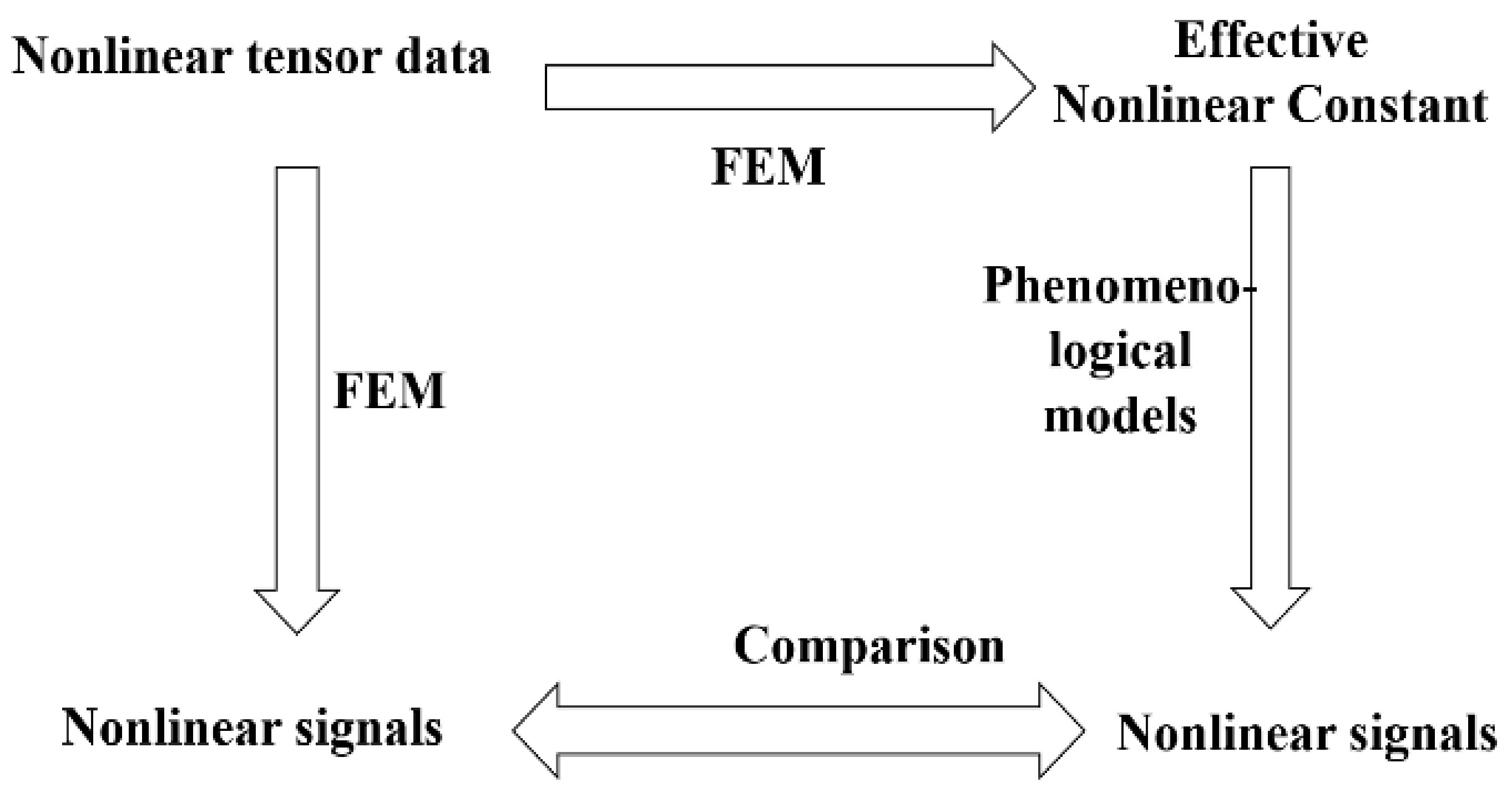
3.2. Precise Simulation Models
3.3. Comparison of Different Nonlinear Models
4. Experimental Measurement for Nonlinear Signals
- (1)
- The nonlinear characteristics of SAW devices are quite weak. Thus, if there is no precaution and a high dynamic range of the testing system, the nonlinearity of SAW will be prone to be overwhelmed by the nonlinearity of measurement equipment and peripheral circuits.
- (2)
- The power capacity of SAW devices is limited. Therefore, the imposed maximum input power of SAW devices is commonly no more than 36 dBm.
- (3)
- Under the condition of large-signal measurement, it can be found that the frequency responses of SAW devices suffer from the self-heating effect. Therefore, it is critical to select a measurement method which is insensitive to self-heating effects.
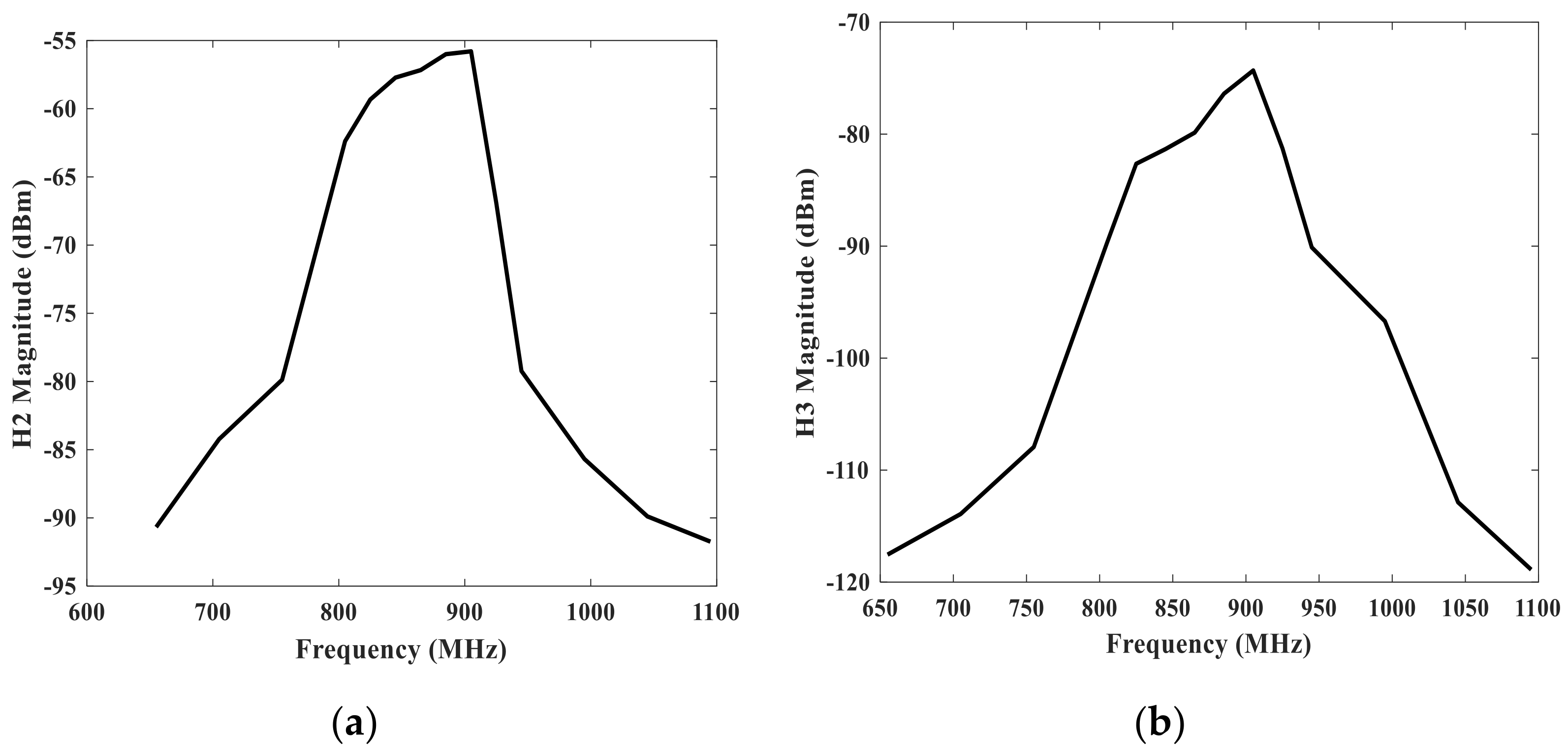
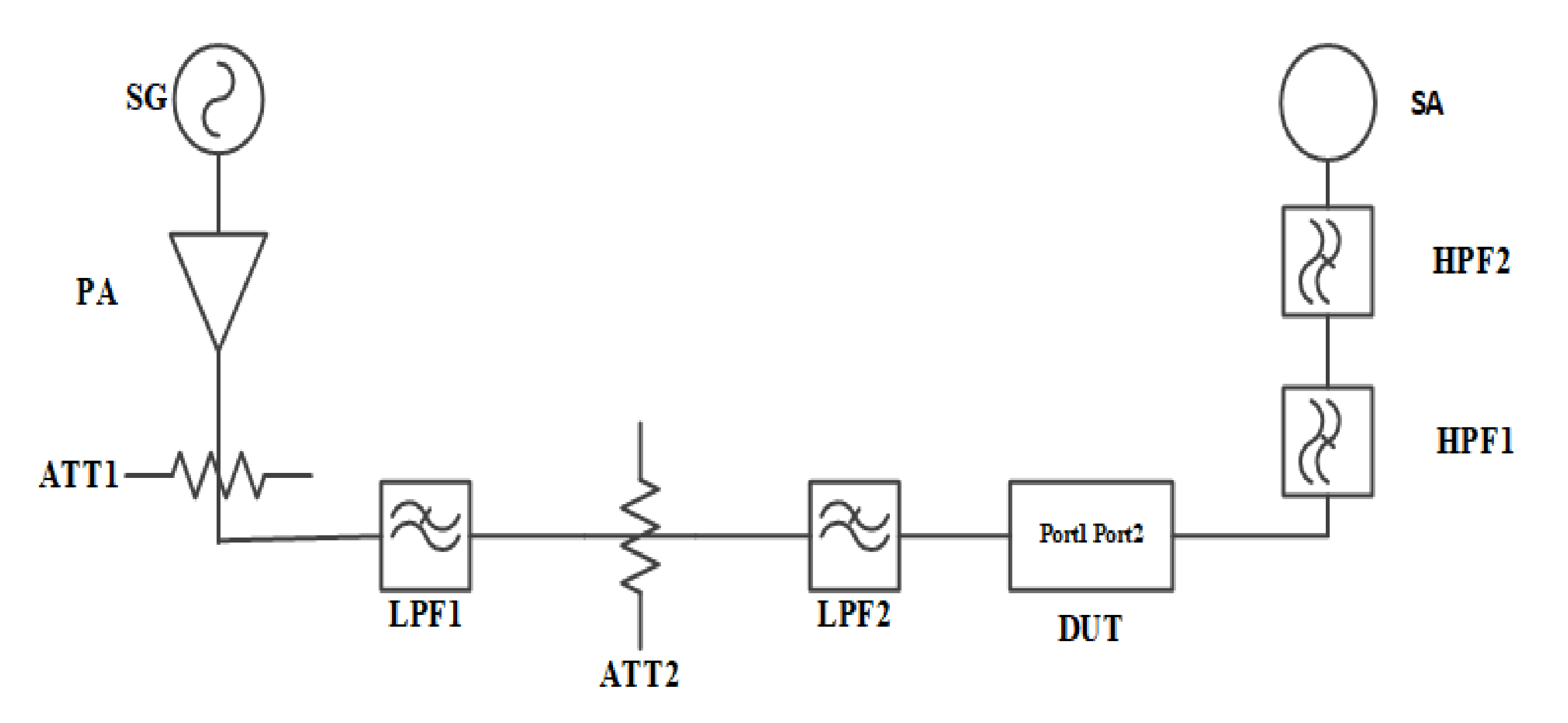
4.1. Harmonics Measurement
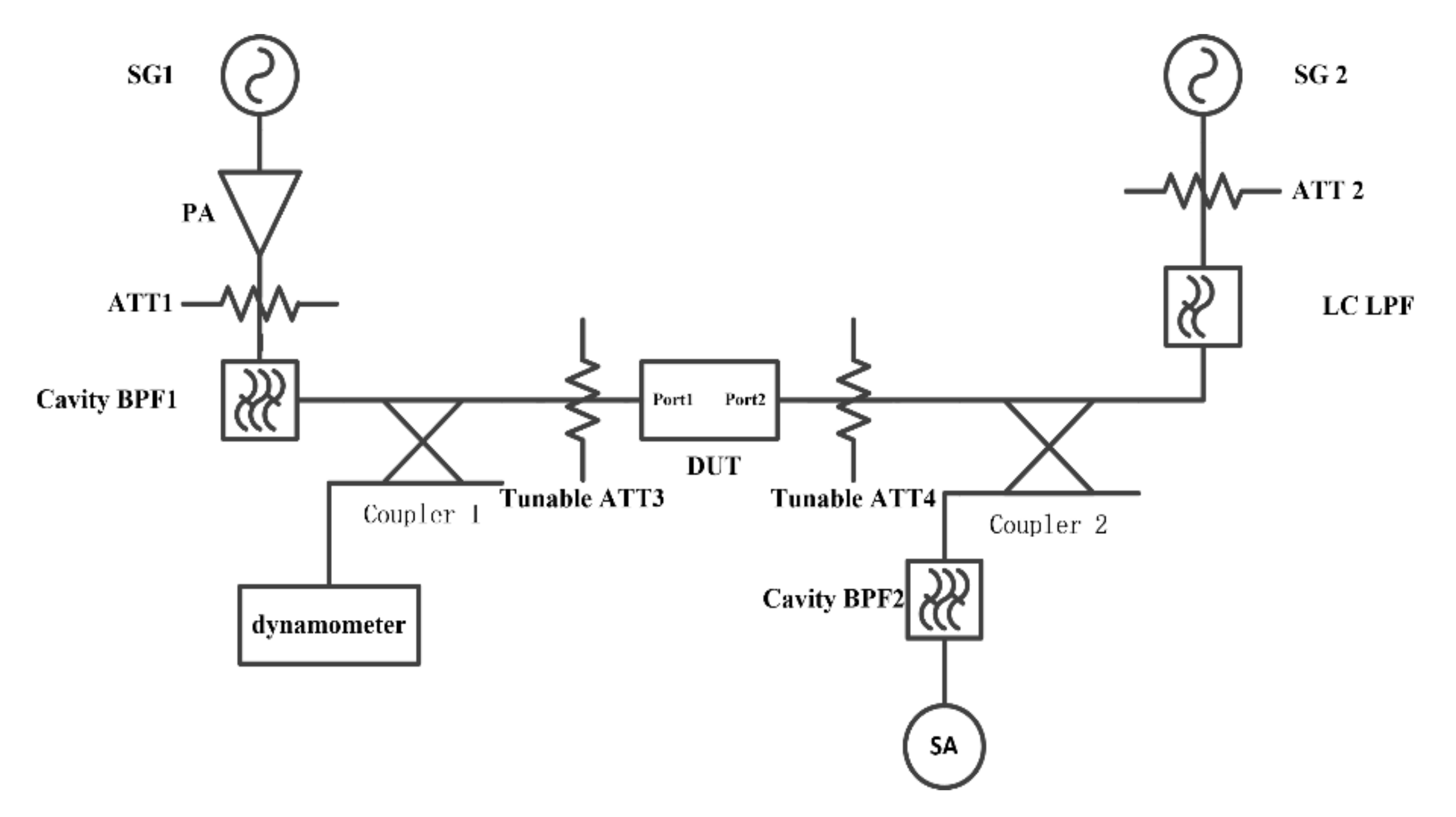
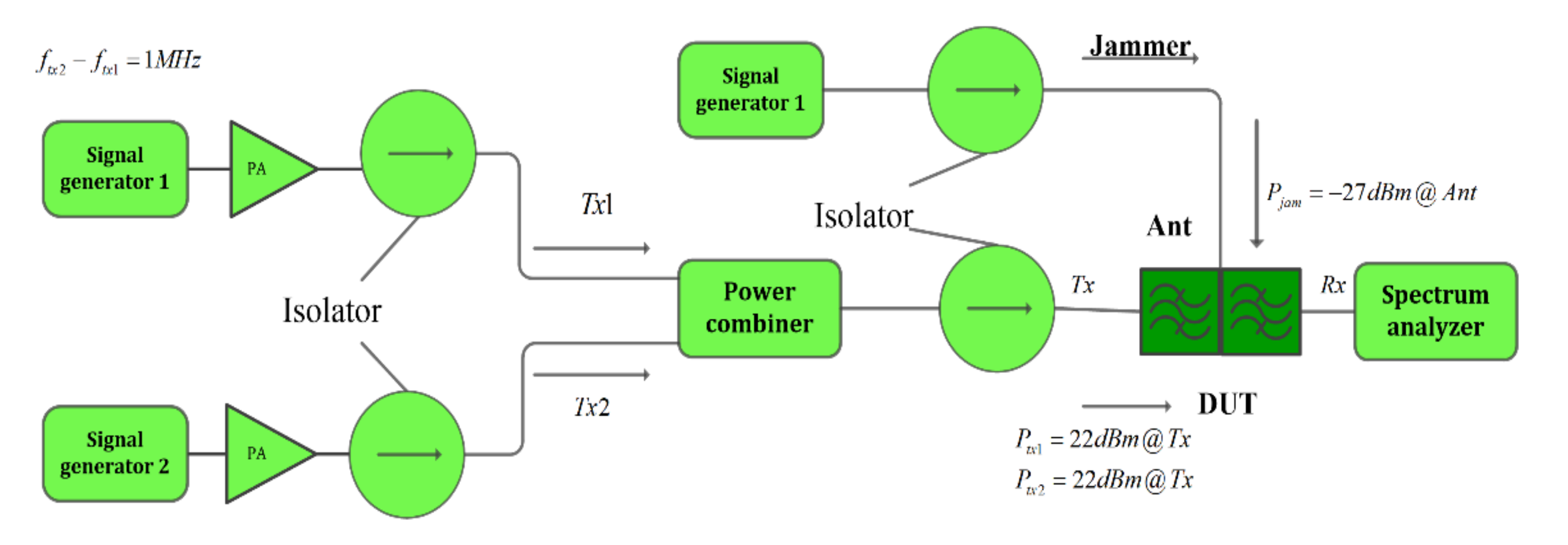
4.2. Intermodulation Measurement
4.3. Triple-Beat Measurement
5. Suppression for Nonlinear Effect
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Juxing, H.; Honglang, L.; Yahui, T.; Qiaozhen, Z.h.; Zixiao, L.; Jianyu, L. Numerical Analysis of Viscous Dissipation in Microchannel Sensor Based on Phononic Crystal. Micromachines 2021, 12, 994. [Google Scholar] [CrossRef] [PubMed]
- Yahui, T.; Honglang, L.; Wencan, C.; Zixiao, L.; Wei, L.; Xihui, M.; Litian, W. A novel Love Wave Mode Sensor Waveguide Layer with Microphononic Crystals. Appl. Sci. 2021, 11, 8123. [Google Scholar]
- Chen, L.; Briot, J.; Girard, P.; Ledesma, C.; Solal, M.; Cheema, K.; Malocha, D.; Wahid, P. Third Order Nonlinear Distortion of SAW Duplexers in UMTS system. In Proceedings of the IEEE International Ultrasonics Symposium, San Diego, CA, USA, 11–14 October 2010. [Google Scholar]
- Chen, L. A Novel Nonlinear Mason Model and Nonlinear Distortion Characterization for Surface Acoustic Wave Duplexers. Master’s Thesis, University of Central Florida, Orlando, FL, USA, 2013. [Google Scholar]
- Hosaka, N.; Yuhara, A.; Yamada, J.; Kobayashi, T. Intermodulation in SAW Filters for Cellular Radio Systems. Jpn. J. Appl. Phys. 1989, 29, 154–156. [Google Scholar] [CrossRef]
- Inoue, S.; Hara, M.; Iwaki, M.; Tsutsumi, J.; Nakamura, H.; Ueda, M.; Satoh, Y. A Nonlinear Elastic Model for Predicting triple beat in SAW duplexers. In Proceedings of the 2011 IEEE International Ultrasonics Symposium, Orlando, FL, USA, 18–21 October 2011; pp. 1837–1841. [Google Scholar]
- Hashimoto, K.; Kodaira, R.; Omori, T. Generation Mechanisms of Second-Order NonLinearity in Surface Acoustic Wave Devices. In Proceedings of the IEEE International Ultrasonics Symposium 2014, Chicago, IL, USA, 3–6 September 2014; pp. 791–794. [Google Scholar]
- Nakagawa, R.; Kyoya, H.; Shimizu, H.; Kihara, T. Effective Suppression Method for 2nd Nonlinear Signals of SAW Devices. In Proceedings of the 2014 IEEE International Ultrasonics Symposium (IUS), Chicago, IL, USA, 3–6 September 2014. [Google Scholar]
- Nakagawa, R.; Suzuki, T.; Shimizu, H.; Kyoya, H.; Nako, K.; Hashimoto, K.Y. Study on Generation Mechanisms of Third-order Nonlinear Signals in SAW Devices on the Basis of Simulation. In Proceedings of the 2015 IEEE International Ultrasonics Symposium (IUS), Taipei, Taiwan, 21–24 October 2015. [Google Scholar]
- Nakagawa, R.; Suzuki, T.; Shimizu, H.; Kyoya, H.; Hashimoto, K.Y. Influence of Electrode Structure on Generation of Third-Order Nonlinearity in Surface Acoustic Wave Devices. Jpn. J. Appl. Phys. 2015, 54, 07HD11. [Google Scholar] [CrossRef]
- Nakagawa, R.; Kyoya, H.; Shimizu, H.; Kihara, T.; Hashimoto, K.Y. Study on Generation Mechanisms of Second-order Nonlinear Signals in Surface Acoustic Wave Devices and Their Suppression. Jpn. J. Appl. Phys. 2015, 54, 07HD12. [Google Scholar] [CrossRef]
- Nakagawa, R.; Suzuki, T.; Shimizu, H.; Kyoya, H.; Nako, K.; Hashimoto, K.-Y. Discussion about Generation Mechanisms of Third-order Nonlinear Signals in Surface Acoustic Wave Resonators based on Simulation. Jpn. J. Appl. Phys. 2016, 55, 07KD02. [Google Scholar] [CrossRef]
- Nakagawa, R.; Suzuki, T.; Shimizu, H.; Kyoya, H.; Hashimoto, K.Y. Influence of Electrode Materials and Structural Design on Third-order Nonlinear Signals of SAW Devices. In Proceedings of the 2016 IEEE International Ultrasonics Symposium (IUS), Tours, France, 18–21 September 2016. [Google Scholar]
- Nakagawa, R.; Hashimoto, K.-Y. Influence of Electrode Width of Interdigital Transducer on Third-order Nonlinearity of Surface Acoustic Wave Devices on 42°YX-LiTaO3 Substrate. Jpn. J. Appl. Phys. 2018, 57, 07LD18. [Google Scholar] [CrossRef]
- Solal, M.; Kokkonen, K.; Inoue, S.; Briot, J.B.; Abbott, B.; Gamble, K. Observation for Nonlinear Harmonic Generation of Bulk Modes in SAW Devices. In Proceedings of the 2016 IEEE International Ultrasonics Symposium (IUS), Tours, France, 18–21 September 2016; pp. 1–4. [Google Scholar]
- Yahui, T.; Honglang, L.; Yabing, K.; Ce, Y.; Shitang, H. P-Matrix Analysis of Surface Acoustic Waves in Piezoelectric Phononic Crystals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 757–763. [Google Scholar]
- Grunauer, G.; Mayer, M.; Javid, G.D.; Ebner, T.; Wagner, K.; Pesch, H.J. Derivation of Accurate Tensor Data of Materials in SAW Devices by Solving a Parameter Identification Problem. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 827–830. [Google Scholar]
- Yahui, T.; Honglang, L.; Yabing, K.; Ce, Y.; Shitang, H.; Wei, L. Extractions of Reflection and Velocity Parameters for Surface Acoustic Wave in Two-Dimensional Piezoelectric Phononic Crystals. In Proceedings of the 2014 IEEE International Ultrasonics Symposium, Chicago, IL, USA, 3–6 September 2014; pp. 2525–2528. [Google Scholar]
- Cho, Y.; Wakita, J.; Miyagawa, N. Nonlinear Equivalent Circuit Model Analysis of Acoustic Devices and Propagation of Surface Acoustic Wave. J. Appl. Physics Regul. Pap. Short Notes 1993, 32, 2261–2264. [Google Scholar] [CrossRef]
- Solal, M.; Chen, L.; Gratier, J.; Hester, S. A nonlinear P matrix Model to Simulate Intermodulation Products in SAW Devices. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 61–66. [Google Scholar]
- Forster, T.; Mayer, M.; Chauhan, V.; Ebner, T.; Wagnery, K.C.; Hagelauer, A. A general P-matrix model to Calculate Second-order Nonlinearity in TC-SAW Devices. In Proceedings of the 2020 IEEE International Ultrasonics Symposium (IUS), Las Vegas, NV, USA, 6–11 September 2020; pp. 1–4. [Google Scholar]
- Inoue, S.; Mitobe, S.; Hara, M.; Iwaki, M.; Tsutsumi, J.; Nakamura, H.; Ueda, M.; Satoh, Y. A Precise Nonlinear Simulation for SAW Duplexers Considering Nonlinear Elasticity. In Proceedings of the 41st European Microwave Conference IEEE 2011, Manchester, UK, 10–13 October 2011. [Google Scholar]
- Inoue, S.; Iwaki, M.; Tsutsumi, J.; Nakamura, H.; Ueda, M.; Satoh, Y. A Triple-beat-free PCS SAW Duplexer. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 1–4. [Google Scholar]
- Inoue, S.; Matsuda, S.; Tsutsumi, J.; Ueda, M.; Satoh, Y. Visualization of Nonlinear SAW Displacements in Resonators Induced by Nonlinear Elasticity. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 48–51. [Google Scholar]
- Inoue, S.; Mitobe, S.; Iwaki, M.; Tsutsumi, J.; Nakamura, H.; Ueda, M.; Satoh, Y. Validation and Application of Nonlinear Elastic Model to Design Triple-beat-free SAW Duplexers. In Proceedings of the 2012 7th European Microwave Integrated Circuit Conference, Amsterdam, The Netherlands, 29–30 October 2012; pp. 155–158. [Google Scholar]
- Mayer, M.; Ruile, W.; Johnson, J.; Bleyl, I.; Wagner, K.; Mayer, A.; Mayer, E. Rigorous COM and P-matrix Approaches to the Simulation of Third-order Intermodulation Distortion and Triple Beat in SAW Filters. In Proceedings of the 2013 IEEE International Ultrasonics Symposium (IUS), Prague, Czech Republic, 21–25 July 2013; pp. 1965–1968. [Google Scholar]
- Mayer, M.; Ruile, W.; Johnson, J.; Kiwitt, J.; Romeo, S.J.; Schmidhammer, E.; Bleyl, I.; Wagner, K.; Mayer, A.; Mayer, E. Application of a Rigorous Nonlinear P-matrix Method to the Simulation of Third Order. In Proceedings of the 2014 IEEE International Ultrasonics Symposium, Chicago, IL, USA, 3–6 September 2014; pp. 787–790. [Google Scholar]
- Mayer, A.; Mayer, E.; Mayer, M.; Jäger, P.; Ruile, W.; Bleyl, I.; Wagner, K. Effective Nonlinear Constants for SAW Devices from FEM Calculations. In Proceedings of the 2015 IEEE International Ultrasonics Symposium (IUS), Taipei, Taiwan, 21–24 October 2015; pp. 1–4. [Google Scholar]
- Mayer, A.; Mayer, E.; Mayer, M.; Jäger, P.; Ruile, W.; Bleyl, I.; Wagner, K. A Full 2D-FEM Calculations of Third-order Intermodulations in SAW Devices. In Proceedings of the 2016 IEEE International Ultrasonics Symposium (IUS), Tours, France, 18–21 September 2016; pp. 1–4. [Google Scholar]
- Nako, K.; Nakagawa, R.; Suzuki, T.; Takigawa, K.; Shimizu, H.; Kyouya, H. A New Simulation Model for Nonlinearity of SAW Resonator Filters. In Proceedings of the 2011 IEEE International Ultrasonics Symposium, Orlando, FL, USA, 18–21 October 2011; Volume 7, pp. 1842–1845. [Google Scholar]
- Ueda, M.; Iwaki, M.; Nishihara, T.; Satoh, Y.; Hashimoto, K.Y. Investigation on Nonlinear Distortion of Acoustic Devices for Radio-frequency Applications and Its Suppression. In Proceedings of the 2009 IEEE International Ultrasonics Symposium, Rome, Italy, 20–23 September 2009. [Google Scholar]
- Akstaller, W.; Musolff, C.; Weigel, R.; Hagelauer, A. X-Parameter Characterization of TC SAW Filters with Enhanced Dynamic Range. IEEE Trans. Microw. Theory Tech. 2017, 65, 4541–4549. [Google Scholar] [CrossRef]
- Nakagawa, R.; Hashimoto, K.Y. Influence of Electrode Width of Interdigital Transducer on Third-order Nonlinear Signals of SAW Devices on 42ºYX-LiTaO3 Substrate. In Proceedings of the 2017 IEEE International Ultrasonics Symposium (IUS), Washington, DC, USA, 6–9 September 2017. [Google Scholar]
- González-Rodríguez, M.; Collado, C.; Mateu, J.; Gonzalez-Arbesú, J.M.; Huebner, S.; Aigner, R. Fast Simulation Method of Distributed Nonlinearities in Surface Acoustic Wave Resonators. In Proceedings of the 2020 IEEE International Ultrasonics Symposium (IUS), Las Vegas, NV, USA, 6–11 September 2020; pp. 1–4. [Google Scholar]
- Perea-Robles, R.; Mateu, J.; Collado, C.; Aigner, R. Nonlinear Performance on Acoustic Transversal Filters. In Proceedings of the 2020 IEEE International Ultrasonics Symposium (IUS), Las Vegas, NV, USA, 7–11 September 2020; pp. 1–4. [Google Scholar]
- Yong, Y.K.; Pang, X. Nonlinear Time Domain-FFT Study of the f-2f Frequency Response of Lithium Niobate YX-127o SAW Resonators. In Proceedings of the 2017 Joint Conference of the European Frequency and Time Forum and IEEE International Frequency Control Symposium ((EFTF/IFC), Besancon, France, 9–13 July 2017. [Google Scholar]
- Pang, X.; Yong, Y.K. Novel FEM Models of Intermodulation Effects. In Proceedings of the 2019 IEEE International Ultrasonics Symposium (IUS), Glasgow, UK, 6–9 October 2019; pp. 177–180. [Google Scholar]
- Pang, X.; Yong, Y.K. Simulation of Nonlinear Resonance Amplitude-Frequency and Harmonic Generation Effects in SAW and BAW Devices. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 67, 422–430. [Google Scholar] [CrossRef] [PubMed]
- Thurston, R.N.; Mcskimin, H.J.; Andreatch, P. Third-Order Elastic Coefficients of Quartz. J. Appl. Phys. 1966, 37, 267–275. [Google Scholar] [CrossRef]
- Gagnepain, J.J. Nonlinear constants and their significance. In Proceedings of the 41st Annual Frequency Control Symposium; IEEE: Piscataway, NJ, USA, 1987; pp. 266–276. [Google Scholar]
- Yasuo, C.; Kazuhiko, Y. Nonlinear, Elastic, Piezoelectric, Electrostrictive, and Dielectric Constants of Lithium Niobate. J. Appl. Phys. 1987, 61, 875–887. [Google Scholar]
- Geshi, K.; Teraoka, K.; Kinoshita, S.; Nakayama, M.; Imagawa, Y.; Nakayama, S.; Hashimoto, K.; Tanaka, S.; Tostsu, K.; Takagi, H. Wafer Bonding of Polycrystalline Spinel with LiNbO3/LiTaO3 for Temperature Compensation of RF Surface Acoustic Wave Devices. In Proceedings of the 2012 IEEE International Ultrasonics Symposium (IUS), Dresden, Germany, 7–10 October 2012; pp. 2726–2729. [Google Scholar]
- Yuichi, T.; Tsutomu, T.; Hideki, I.; Takeshi, N.; Masayoshi, K. A Novel 3.5 GHz Low-Loss Bandpass Filter Using, I.H.P. SAW Resonators. In Proceedings of the IEEE Asia-Pacific Microwave Conference, Kyoto, Japan, 6–9 November 2018; pp. 1342–1344. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Y.; Wang, L.; Wang, Y.; Li, Y.; Wu, H.; Qian, L.; Li, H.; Wu, J.; Wang, J. Research in Nonlinearity of Surface Acoustic Wave Devices. Micromachines 2021, 12, 1454. https://doi.org/10.3390/mi12121454
Tian Y, Wang L, Wang Y, Li Y, Wu H, Qian L, Li H, Wu J, Wang J. Research in Nonlinearity of Surface Acoustic Wave Devices. Micromachines. 2021; 12(12):1454. https://doi.org/10.3390/mi12121454
Chicago/Turabian StyleTian, Yahui, Litian Wang, Yuanyuan Wang, Yang Li, Haoxiang Wu, Lirong Qian, Honglang Li, Jinghui Wu, and Ji Wang. 2021. "Research in Nonlinearity of Surface Acoustic Wave Devices" Micromachines 12, no. 12: 1454. https://doi.org/10.3390/mi12121454
APA StyleTian, Y., Wang, L., Wang, Y., Li, Y., Wu, H., Qian, L., Li, H., Wu, J., & Wang, J. (2021). Research in Nonlinearity of Surface Acoustic Wave Devices. Micromachines, 12(12), 1454. https://doi.org/10.3390/mi12121454