Electrowetting-on-Dielectric Based Economical Digital Microfluidic Chip on Flexible Substrate by Inkjet Printing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Design, Materials and Fabrication Methods for FDMFC
2.1. Chip Design
2.2. Materials
2.3. Selection of Flexible Substrate
2.4. Inkjet Printing of Patterned Electrode Array
2.5. Preparation of Food Wrap Film as the Dielectric Layer
2.6. Coating of Hydrophobic Layer
3. Results and Discussions
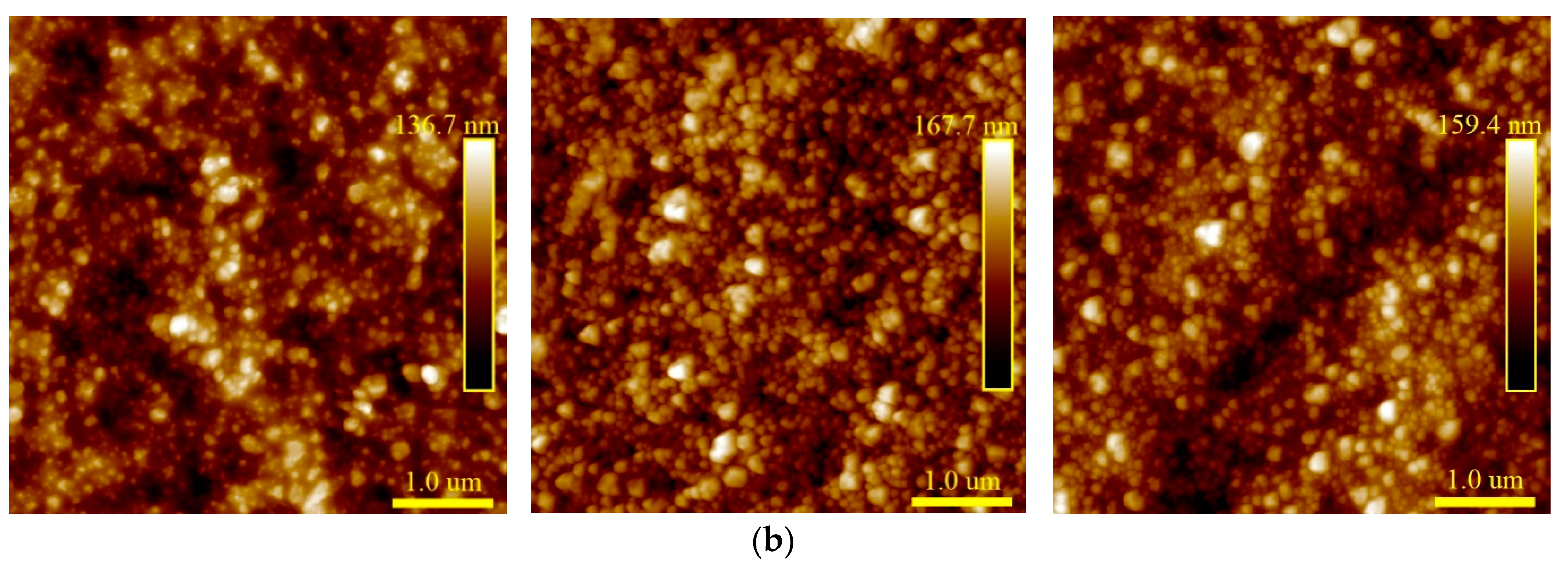
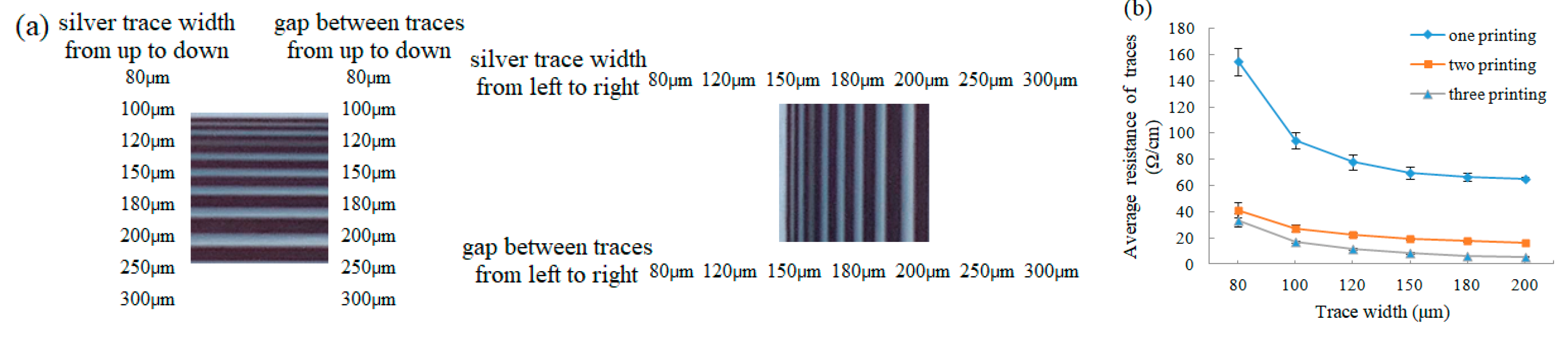
3.1. Performance of the Electrodes and Silver Traces Inkjet-Printed on PET Substrate
3.2. The Properties of Dielectric Film and Hydrophobic Layer
3.3. Droplet Operations on FDMFC
3.3.1. Droplet Operations on Square Electrodes
3.3.2. Droplet Operations on Hexagon Electrodes
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Shen, H.H.; Fan, S.K.; Kim, C.J. EWOD microfluidic systems for biomedical applications. Microfluid. Nanofluid. 2014, 16, 965–987. [Google Scholar] [CrossRef]
- Miller, E.M.; Wheeler, A.R. Digital bioanalysis. Anal. Bioanal. Chem. 2009, 393, 419–426. [Google Scholar] [CrossRef] [PubMed]
- Cho, S.K.; Moon, H. Electrowetting on dielectric (EWOD): New tool for bio/micro fluids handling. BioChip J. 2009, 2, 79–96. [Google Scholar]
- Mugele, F.; Baret, J.C. Electrowetting: From basics to applications. J. Phys. Condens. Matter. 2005, 17, R705–R774. [Google Scholar] [CrossRef]
- Abdelgawad, M.; Wheeler, A.R. Low-cost, rapid prototyping of digital microfluidics devices. Microfluid. Nanofluid. 2007, 4, 349–355. [Google Scholar] [CrossRef]
- Samiei, E.; Tabrizian, M.; Hoorfar, M. A review of digital microfluidics as portable platforms for lab-on a-chip applications. Lab Chip 2016, 16, 2376–2396. [Google Scholar] [CrossRef]
- Ehsan, S.; Mina, H. Systematic analysis of geometrical based unequal droplet splitting in digital microfluidics. J. Micromech. Microeng. 2015, 25, 055008. [Google Scholar]
- Sista, R.S.; Wang, T.; Wu, N.; Graham, C.; Eckhardt, A.; Winger, T.; Srinivasan, V.; Bali, D.; Millington, D.S.; Pamula, V.K. Multiplex newborn screening for Pompe, Fabry, Hunter, Gaucher, and Hurler diseases using a digital microfluidic platform. Clin. Chim. Acta 2013, 424, 12–18. [Google Scholar] [CrossRef]
- Khan, S.; Lorenzelli, L.; Dahiya, R.S. Technologies for Printing Sensors and Electronics over Large Flexible Substrates: A Review. IEEE Sens. J. 2015, 15, 3164–3185. [Google Scholar] [CrossRef]
- Choi, K.; Alphonsus, H.C.; Fobel, R.; Wheeler, A.R. Digital microfluidics. Anal. Chem. 2012, 5, 413–440. [Google Scholar] [CrossRef]
- Gross, B.C.; Erkal, J.L.; Lockwood, S.Y.; Chen, C.; Spence, D.M. Evaluation of 3D printing and its potential impact on biotechnology and the chemical sciences. Anal. Chem. 2014, 86, 3240–3253. [Google Scholar] [CrossRef] [PubMed]
- Raviv, D.; Zhao, W.; McKnelly, C.; Papadopoulou, A.; Kadambi, A.; Shi, B.; Hirsch, S.; Dikovsky, D.; Zyracki, M.; Olguin, C.; et al. Active Printed Materials for Complex Self-Evolving Deformations. Sci. Rep. 2014, 4, 7422. [Google Scholar] [CrossRef] [PubMed]
- Peng, B.; Ren, X.; Wang, Z.; Wang, X.; Roberts, R.C.; Chan, P.K.L. High performance organic transistor active-matrix driver developed on paper substrate. Sci. Rep. 2014, 4, 6430. [Google Scholar] [CrossRef] [PubMed]
- Lessing, J.; Glavan, A.C.; Walker, S.B.; Keplinger, C.; Lewis, J.A.; Whitesides, G.M. Inkjet Printing of Conductive Inks with High Lateral Resolution on Omniphobic “RF Paper” for Paper-Based Electronics and MEMS. Adv. Mater. 2014, 26, 4677–4682. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, S.; Bui, M.N.; Abbas, A. Paper-based chemical and biological sensors: Engineering aspects. Biosens. Bioelectron. 2015, 77, 249–263. [Google Scholar] [CrossRef] [PubMed]
- Mattana, G.; Briand, D. Recent advances in printed sensors on foil. Mater. Today 2016, 19, 88–99. [Google Scholar] [CrossRef]
- Rolland, J.P.; Mourey, D.A. Paper as a novel material platform for devices. MRS Bull. 2013, 38, 299–333. [Google Scholar] [CrossRef]
- Martinez, A.W.; Phillips, S.T.; Butte, M.J.; Whitesides, G.M. Patterned Paper as a Platform for Inexpensive, Low-Volume, Portable Bioassays. Angew. Chem. Int. Ed. 2007, 46, 1318–1320. [Google Scholar] [CrossRef]
- Zhao, W.; Berg, A.V.D. Lab on paper. Lab Chip 2008, 8, 1988–1991. [Google Scholar]
- Li, X.; Ballerini, D.R.; Shen, W. A perspective on paper-based microfluidics: Current status and future trends. Biomicrofluidics 2012, 6, 011301. [Google Scholar] [CrossRef]
- He, J. Investigation on Preparation and Application of Water-based Nanosilver Conductive Ink for Inkjet Printing. Master’s Thesis, Tianjing University, Tianjing, China, June 2012. [Google Scholar]
- Qu, Z. Effect of Ink-jet Printing Process on Conductive Properties in Conductive Ink. Packag. Eng. 2016, 37, 152–155. [Google Scholar]
- Denneulin, A.; Bras, J.; Blayo, A.; Neuman, C. Substrate pre-treatment of flexible material for printed electronics with carbon nanotube based ink. Appl. Surf. Sci. 2011, 257, 3645–3651. [Google Scholar] [CrossRef]
- Tobjörk, D.; Aarnio, H.; Pulkkinen, P.; Bollström, R.; Määttänen, A.; Ihalainen, P.; Mäkelä, T.; Peltonen, J.; Toivakka, M.; Tenhu, H.; et al. IR-sintering of ink-jet printed metal-nanoparticles on paper. Thin Solid Films 2012, 520, 2949–2955. [Google Scholar] [CrossRef]
- Chen, S.P.; Kao, Z.K.; Lin, J.L.; Liao, Y.C. Silver conductive features on flexible substrates from a thermally accelerated chain reaction at low sintering temperatures. ACS Appl. Mater. Interfaces 2012, 4, 7064–7068. [Google Scholar] [CrossRef]
- Moon, H.; Cho, S.K. Low voltage electrowetting-on-dielectric. J. Appl. Phys. 2002, 92, 4080–4087. [Google Scholar] [CrossRef]
- Cho, S.K.; Moon, H.; Kim, C.J. Creating, Transporting, Cutting, and Merging Liquid Droplets by Electrowetting-Based Actuation for Digital Microfluidic Circuits. J. Microelectromech. Syst. 2003, 12, 70–80. [Google Scholar]
- Chang, J.H.; Pak, J.J. Effect of Contact Angle Hysteresis on Electrowetting Threshold for Droplet Transport. J. Adhes. Sci. Technol. 2012, 26, 2105–2111. [Google Scholar] [CrossRef]
- Paik, P.; Pamula, V.K.; Fair, R.B. Rapid droplet mixers for digital microfluidic systems. Lab Chip 2003, 3, 253–259. [Google Scholar] [CrossRef]
- Chakrabarty, K.; Su, F. Digital Microfluidic Biochips: Synthesis, Testing and Reconfiguration Techniques, 1st ed.; CRC Press: Boca Raton, FL, USA, 2007; pp. 173–175. [Google Scholar]
- Dutta, A.; Majumder, R.; Dhal, D.; Pal, R.K. Structural and Behavioural Facets of Digital Microfluidic Biochips with Hexagonal-Electrode-based Array. In Proceedings of the 32nd International Conference on VLSI Design and 18th International Conference on Embedded Systems (VLSID), Delhi, India, 5–9 January 2019; IEEE Computer Society: Washington, DC, USA; pp. 239–244. [Google Scholar]
- Dutta, A.; Majumder, R.; Dhal, D.; Pal, R.K. Structural modeling, design automation, and a generalized routing technique for digital microfluidic biochips with hexagonal electrodes. In Proceedings of the 2019 IEEE Region 10 Symposium (TENSYMP), Kolkata, India, 7–9 June 2019; pp. 337–342. [Google Scholar]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Chen, L. Electrowetting-on-Dielectric Based Economical Digital Microfluidic Chip on Flexible Substrate by Inkjet Printing. Micromachines 2020, 11, 1113. https://doi.org/10.3390/mi11121113
Wang H, Chen L. Electrowetting-on-Dielectric Based Economical Digital Microfluidic Chip on Flexible Substrate by Inkjet Printing. Micromachines. 2020; 11(12):1113. https://doi.org/10.3390/mi11121113
Chicago/Turabian StyleWang, He, and Liguo Chen. 2020. "Electrowetting-on-Dielectric Based Economical Digital Microfluidic Chip on Flexible Substrate by Inkjet Printing" Micromachines 11, no. 12: 1113. https://doi.org/10.3390/mi11121113
APA StyleWang, H., & Chen, L. (2020). Electrowetting-on-Dielectric Based Economical Digital Microfluidic Chip on Flexible Substrate by Inkjet Printing. Micromachines, 11(12), 1113. https://doi.org/10.3390/mi11121113