Development and Experiments of an Electrothermal Driven Deep-Sea Buoyancy Control Module

 and
and
Abstract
:1. Introduction
2. Materials and Design
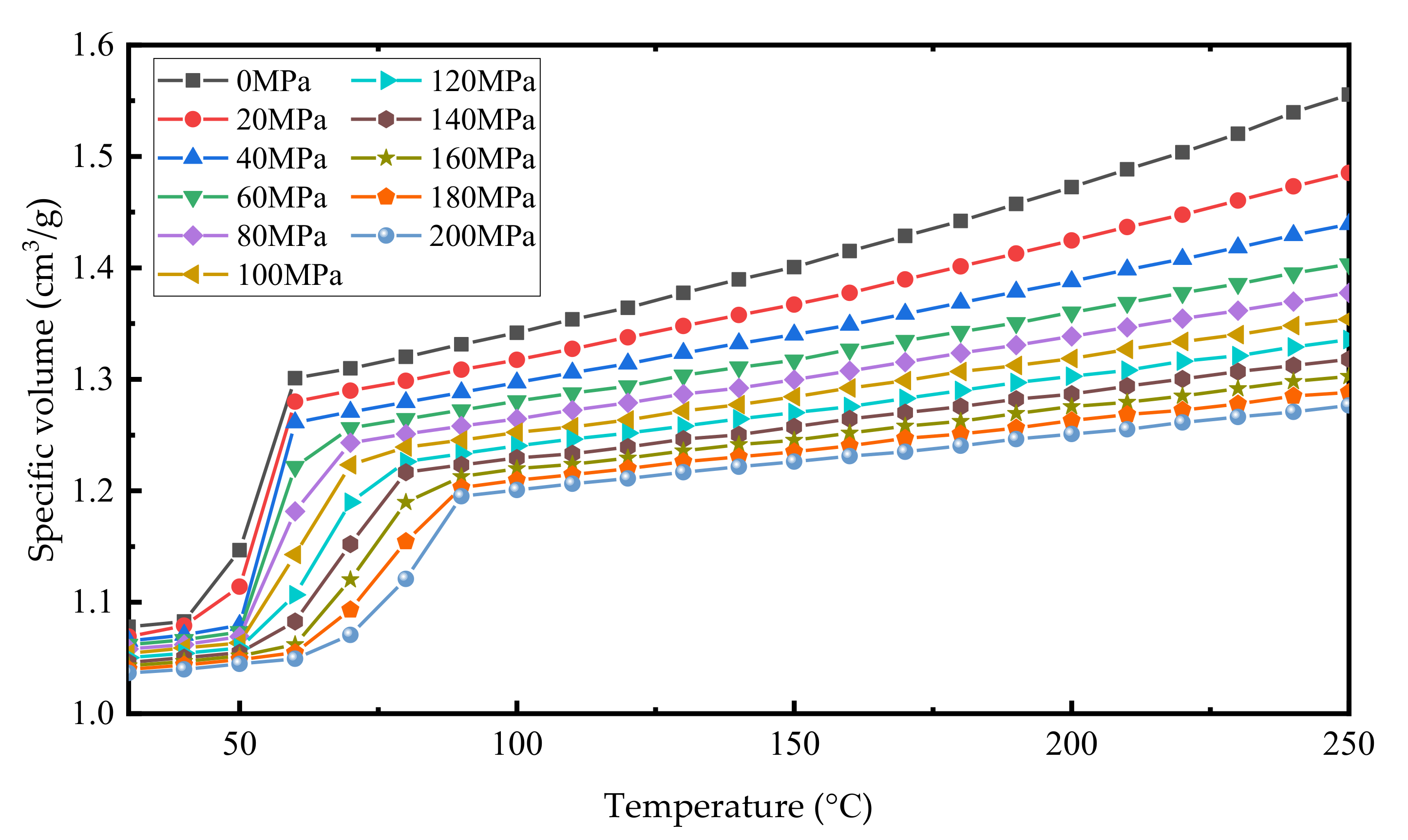
2.1. Thermal Expansion Capacity of Paraffin
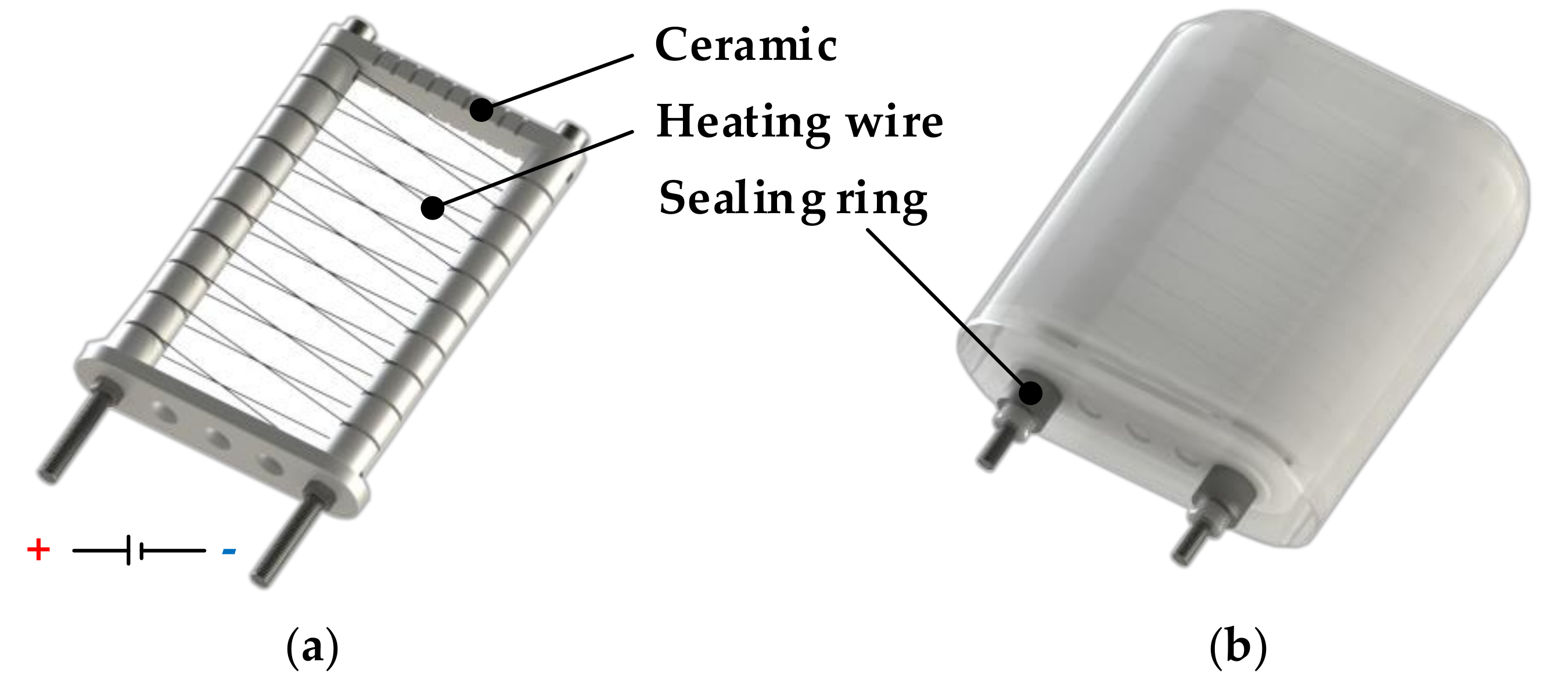
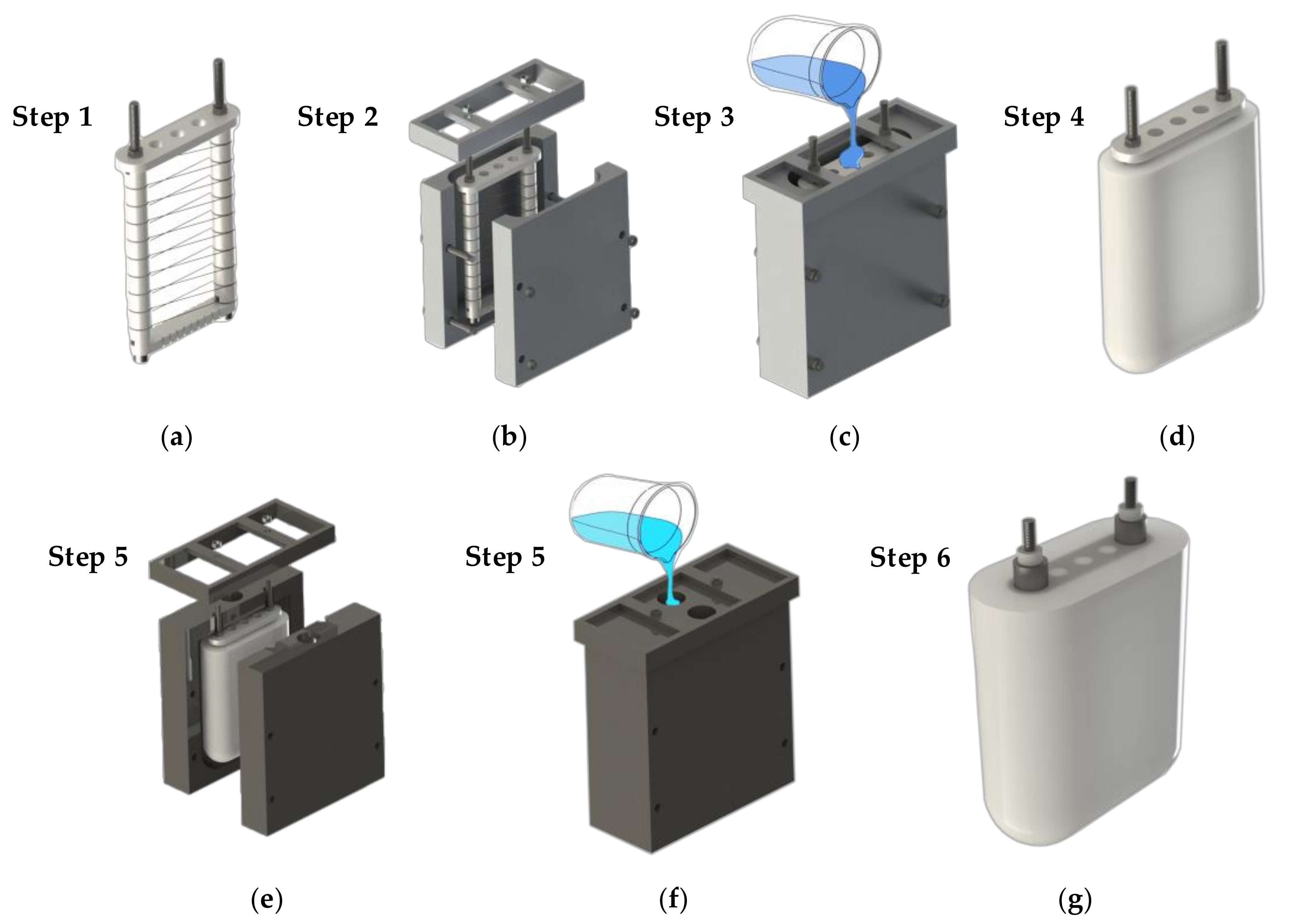
2.2. Module Design and Fabrication
- The attachment structure of the heating wire is composed of a ceramic tube and bolt. A heating wire limit slot is machined on the ceramic tube for fixing the position of the heating wire.
- These iron bolts not only act as a rack but also serve as electrodes for the heating wire. Inside the module, the two ends of the Ni-Cr alloy wire are welded to two bolts, respectively. The bolts exposed outside the module are also connected to the input electrode by welding.
- The Ni-Cr alloy wire is wound on the ceramic insulating structure with a spiral structure and distributed evenly in the paraffin to obtain better heat transfer efficiency.
- There is no adhesion between the exposed end of the bolt and the silicone base housing, and a clamping ring is placed on the housing in this position to prevent the paraffin from leaking when it is heated to a liquid during operation.
3. Experimental Procedures
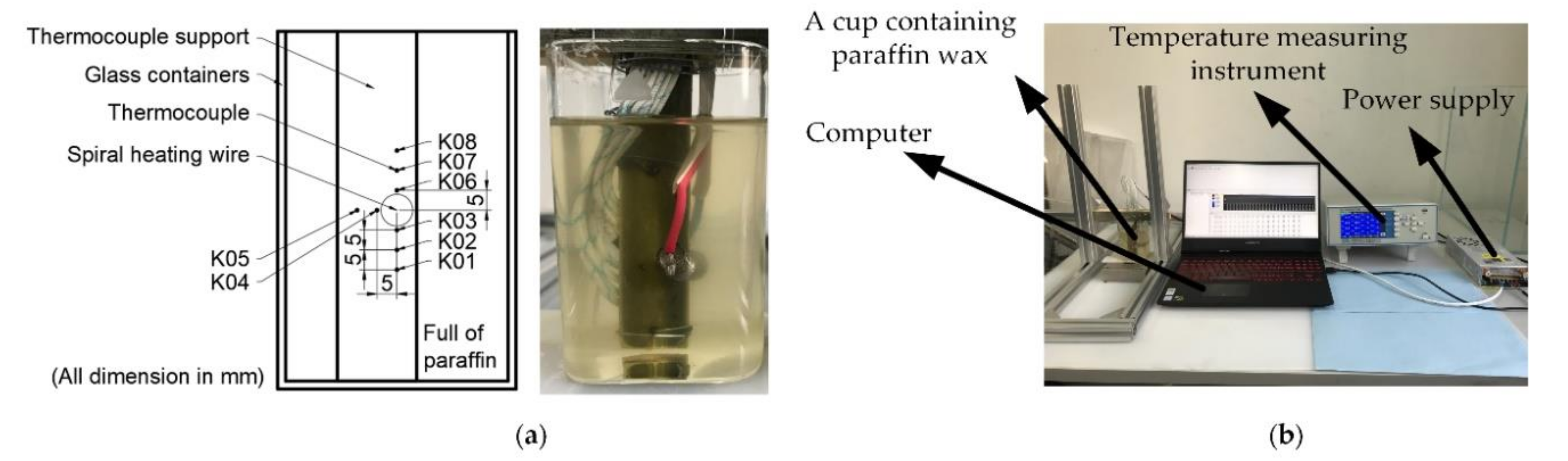
3.1. Melting Experiment of Paraffin
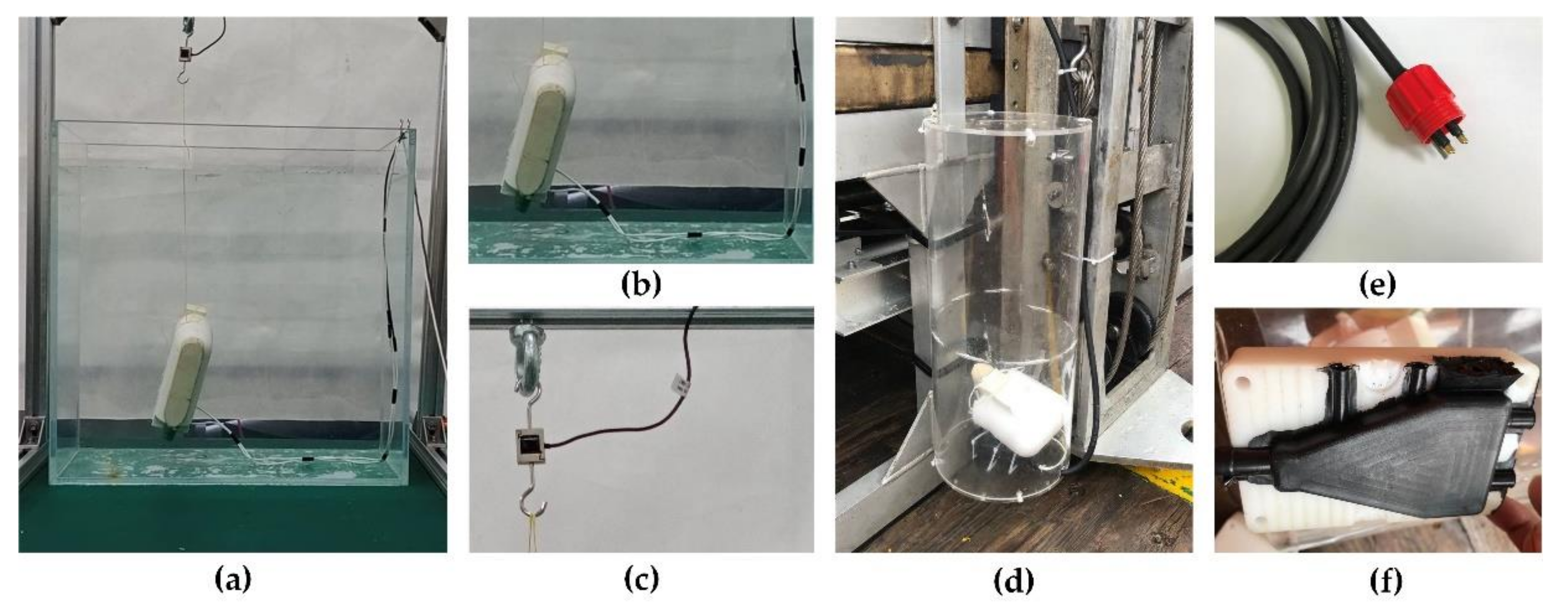
3.2. Buoyancy Testing
3.3. Rise and Levitation
3.3.1. Rise and Levitate in the Tank
3.3.2. Deep-Sea Tests in the South China Sea
4. Results
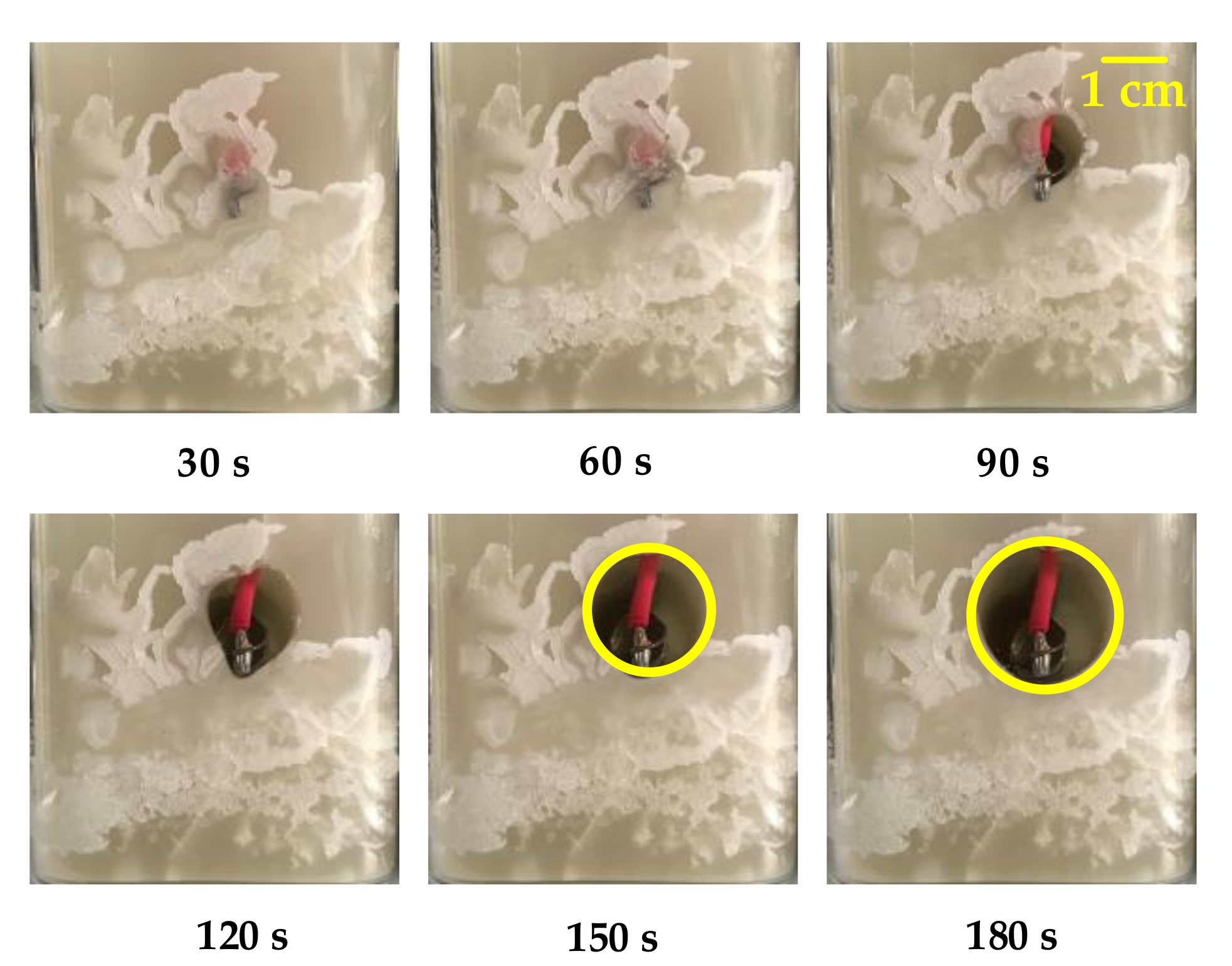
4.1. The Process of Electroheating Paraffin Phase-Change
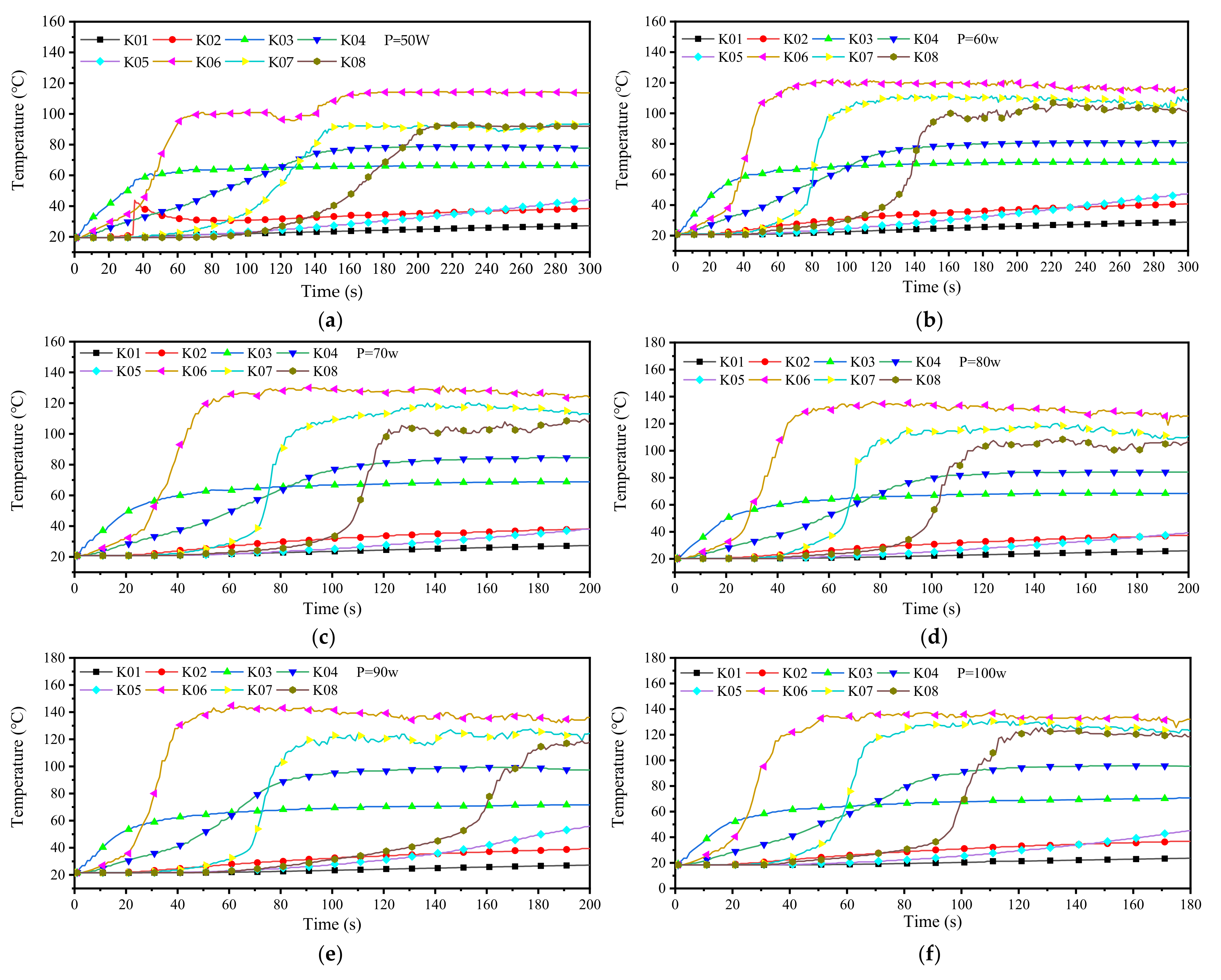
- At the beginning of paraffin melting, the heat transfer form between the heating wire and paraffin is mainly heat conduction. After the liquid region is formed, the heated liquid paraffin expands in volume and decreases in density. The liquid paraffin expands along the holes or gaps around the molten pool, which may lead to sudden local temperature rise (as shown in Figure 9, under the condition of P = 50 W, when the heating time is 30 s, the temperature curve at K02 changes suddenly). After the molten pool is formed, the heated liquid paraffin generates a thermal upwelling driven by buoyancy due to its reduced density. This kind of movement inside the molten pool makes the heat in the molten pool continuously transferred to the upper part, making the upper part of the molten pool hotter than the lower part. Therefore, the solid paraffin on top of the molten pool continues to melt, whereas the paraffin on the bottom does not melt easily.
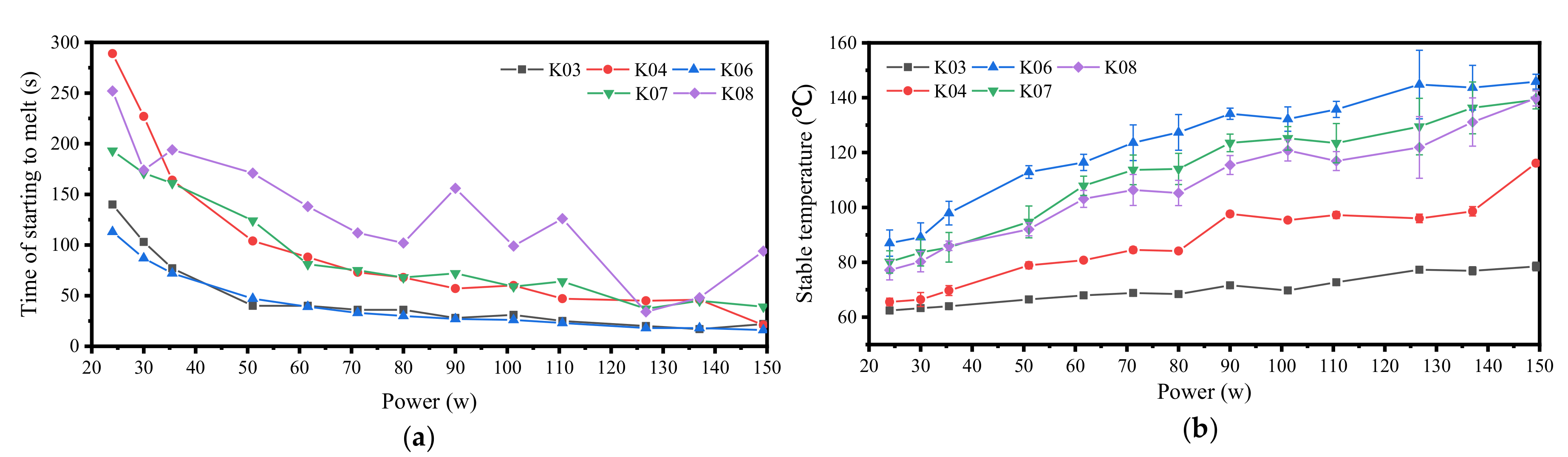
- In the process of melting after being heated by the electric heating wire, the paraffin will gradually form a stable temperature field, and the temperature of each position will fluctuate in a small range. Regions that have reached a stable temperature during the continuous melting process will not experience a significant increase in temperature.
- The stable temperature field will be disturbed by the irregular thermal upwelling, and the irregular thermal upwelling in paraffin will break the original equilibrium and form a new stable temperature field, Figure 10.
- With the increase of heating power, the steady-state temperature of paraffin increases, and the time from heating to melting is shortened, Figure 11.
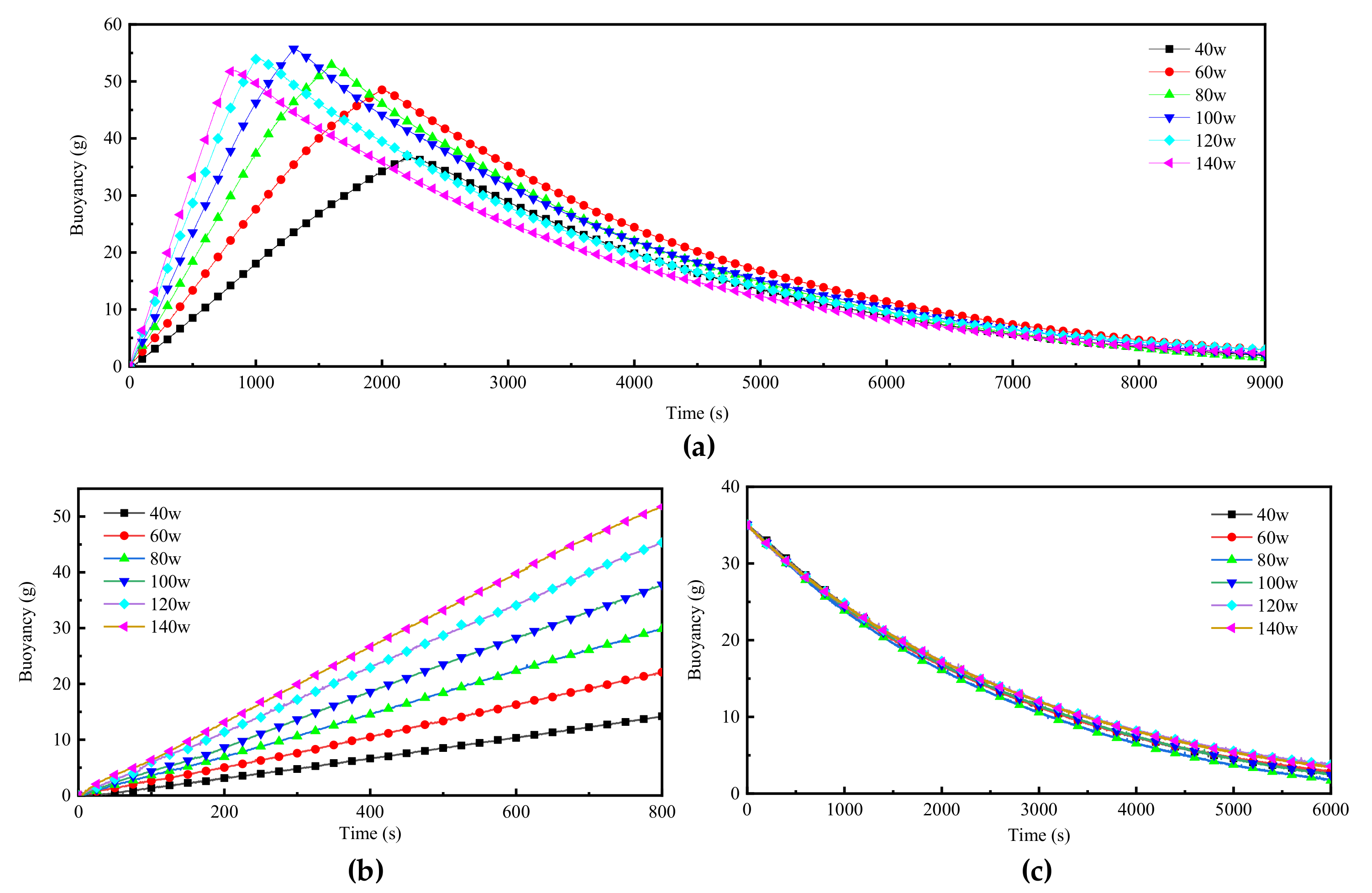
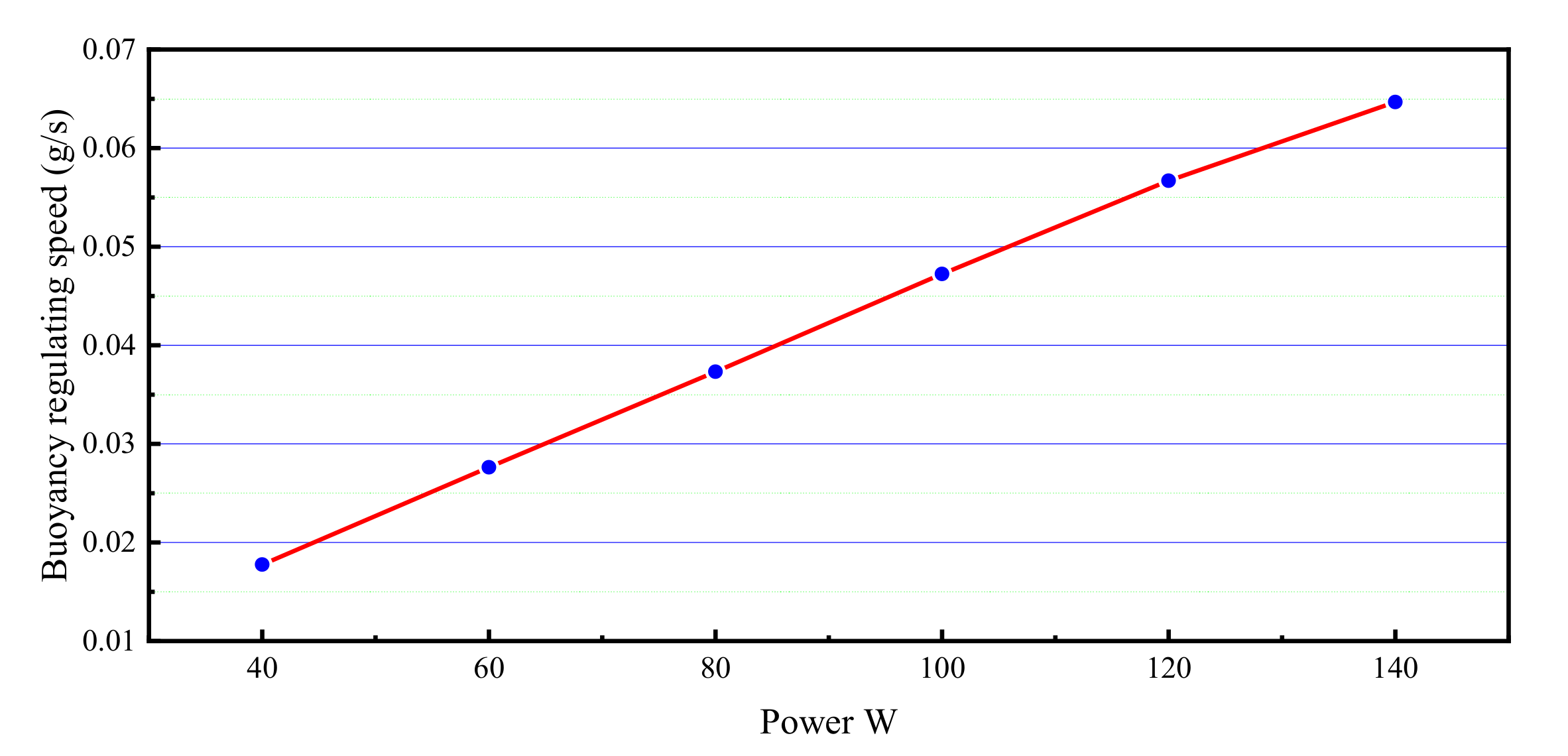
4.2. Buoyancy Regulation Performance
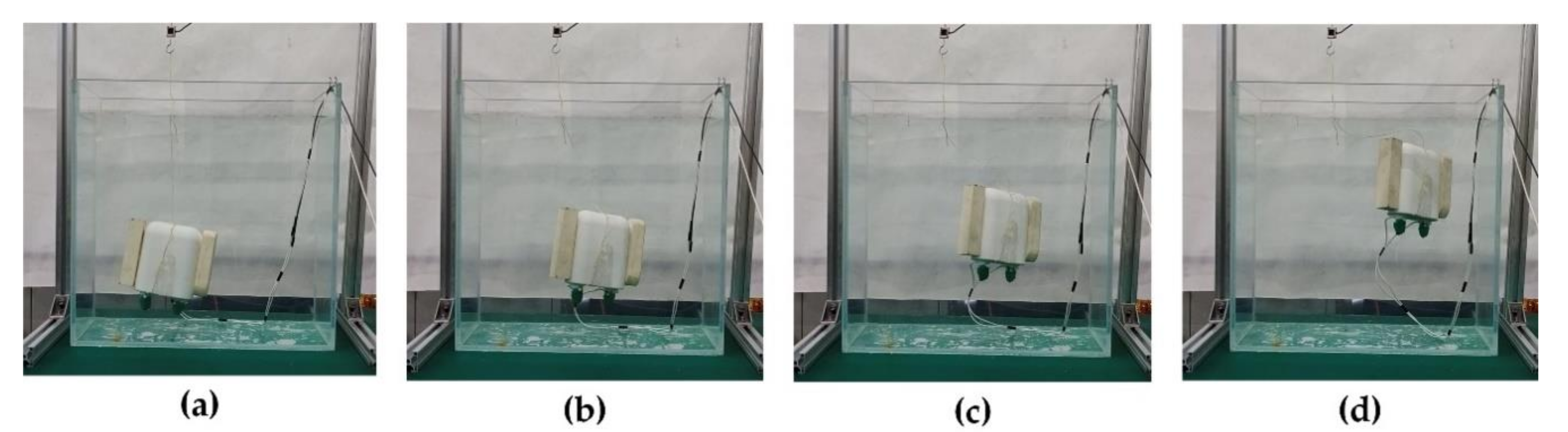
4.3. The Independent Rise and Fall of BCM
5. Discussion
- Special attention should be paid to the welding reliability between Ni-Cr heating wire and electrode in the fabrication of the heating unit. Weak welding will make the buoyancy adjustment module produced short-circuit fault in the process of use.
- The metal mold must be preheated to above the melting point of paraffin when pouring the paraffin. Otherwise, the liquid paraffin will cool down quickly when pouring into the mold. The paraffin solids formed in this way will be mixed with many bubbles, which will seriously affect the quality of the finished product, resulting in waste products.
- Vacuum operation at high temperatures after pouring paraffin can reduce the bubbles in solid paraffin. The slow cooling of paraffin and the avoidance of supercooling caused by the temperature drop can also significantly improve the forming quality of paraffin solids.
- The curing process of silica gel should not be accelerated in a high-temperature environment. At high temperatures, the morphology of paraffin will change uncontrollably, and the product quality is better with the method of curing at room temperature.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kunimatsu, K.; Hattori, Y.; Kurabayashi, D. Single-actuator AUV performing 3-DOF motion. Adv. Robot. 2020, 34, 282–298. [Google Scholar] [CrossRef]
- Yuh, J. Design and control of autonomous underwater robots: A survey. Auton. Robot. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Cagnetti, M. High accuracy buoyancy for underwater gliders: The uncertainty in the depth control. Sensors 2019, 19, 1831. [Google Scholar] [CrossRef] [Green Version]
- Sun, Q.G.; Zheng, R.; Ren, F.; Li, M.; Liang, H. The Design and Analysis of Variable Buoyancy System of AUV. In Proceedings of the 2nd Asia-Pacific Conference on Intelligent Robot Systems, Wuhan, China, 16–18 June 2017; IEEE: New York, NY, USA, 2017; pp. 259–263. [Google Scholar]
- Tangirala, S.; Dzielski, J. A variable buoyancy control system for a large AUV. IEEE J. Ocean. Eng. 2007, 32, 760–771. [Google Scholar] [CrossRef]
- Tiwari, B.K.; Sharma, R. Design and analysis of a variable buoyancy system for efficient hovering control of underwater vehicles with state feedback controller. J. Mar. Sci. Eng. 2020, 8, 263. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Yu, J.; Zhang, A.; Sun, Z.; Kang, S. Development and Experiments of the Buoyancy Adjusting System of Long-Range AUV. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Woods, S.A.; Bauer, R.J.; Seto, M.L. Automated Ballast tank control system for autonomous underwater vehicles. IEEE J. Ocean. Eng. 2012, 37, 727–739. [Google Scholar] [CrossRef]
- Mou, X.H.; Xu, Z.; Wei, P. The research and analysis of one new deep-sea releaser. In Proceedings of the 2015 International Industrial Informatics and Computer Engineering Conference; Yang, L., Zhao, M., Eds.; Atlantis Press: Paris, France, 2015; pp. 753–756. [Google Scholar]
- Webb, D.; Simonetti, P.; Jones, C. SLOCUM: An underwater glider propelled by environmental energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Angilella, A.J.; Gandhi, F.S.; Miller, T.F. Design and testing of a shape memory alloy buoyancy engine for unmanned underwater vehicles. Smart Mater. Struct. 2015, 24, 115018. [Google Scholar] [CrossRef]
- Shibuya, K.; Kado, Y.; Honda, S.; Iwamoto, T.; Tsutsumi, K. Underwater robot with a buoyancy control system based on the spermaceti oil hypothesis. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; Volume 1–12, p. 3012. [Google Scholar]
- Shibuya, K.; Kawai, K. Development of a new BCM for underwater vehicles inspired by the sperm whale hypothesis. Adv. Robot. 2009, 23, 831–846. [Google Scholar]
- Shibuya, K.; Kishimoto, H.; Yoshii, S.J.A.P.L. Depth control of underwater robot with metal bellows mechanism for BCM utilizing phase transition. J. Robot. Mechatron. 2013, 103, 104103–104104. [Google Scholar]
- Yamamoto, H.; Shibuya, K. New small BCM with silicone rubber for underwater vehicles. In Advances in Cooperative Robotics, Proceedings of the CLAWAR 2016: 19th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, London, UK, 12–14 September 2016; Tokhi, M.O., Virk, G.S., Eds.; World Scientific: Singapore, 2016; pp. 258–265. [Google Scholar] [CrossRef]
- Clarke, M.R. Structure and proportions of the spermaceti organ in the sperm whale. J. Mar. Biolog. 1978, 58, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Inoue, T.; Shibuya, K.; Nagano, A. Underwater Robot with a Buoyancy Control System Based on the Spermaceti Oil Hypothesis—Development of the Depth Control System. In Proceedings of the IEEE/Rsj 2010 International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 1102–1107. [Google Scholar]
- Deng, H.; Cui, R.; Hu, H.; Wei, R. Modeling of a Caudal-fin-driven Robotic Fish with Buoyancy-adjusting System. In Proceedings of the 2017 2nd International Conference on Advanced Robotics and Mechatronics, Hefei, China, 27–31 August 2017; pp. 504–509. [Google Scholar]
- Yu, J.; Zhang, C.; Liu, L. Design and control of a single-motor-actuated robotic fish capable of fast swimming and maneuverability. IEEE/ASME Trans. Mechatron. 2016, 21, 1711–1719. [Google Scholar] [CrossRef]
- Aoki, K.; Watanabe, Y.Y.; Crocker, D.E.; Robinson, P.W.; Biuw, M.; Costa, D.P.; Miyazaki, N.; Fedak, M.A.; Miller, P.J.O. Northern elephant seals adjust gliding and stroking patterns with changes in buoyancy: Validation of at-sea metrics of body density. J. Exp. Biol. 2011, 214, 2973–2987. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pond, D.W.; Tarling, G.A. Phase transitions of wax esters adjust buoyancy in diapausing Calanoides acutus. Limnol. Oceanogr. 2011, 56, 1310–1318. [Google Scholar] [CrossRef]
- Rondeau, S.L.; Gee, J.H. Larval anurans adjust buoyancy in response to substrate ingestion. Copeia 2005, 2005, 188–195. [Google Scholar] [CrossRef]
- Zoller, P.; Walsh, D.J. Standard Pressure-Volume-Temperature Data for Polymers; Technomic: Lancaster, CA, USA, 1995; Volume 12, pp. 1–74. [Google Scholar]
- Srivastava, S.; Handoo, J.; Agrawal, K.; Joshi, G. Phase-transition studies in n-alkanes and petroleum-related waxes—A review. J. Phys. Chem. Solids 1993, 54, 639–670. [Google Scholar] [CrossRef]
- Ogden, S.; Klintberg, L.; Thornell, G.; Hjort, K.; Bodén, R. Review on miniaturized paraffin phase change actuators, valves, and pumps. Microfluid. Nanofluid. 2014, 17, 53–71. [Google Scholar] [CrossRef] [Green Version]
- Hosseinizadeh, S.; Darzi, A.R.; Tan, F.; Khodadadi, J. Unconstrained melting inside a sphere. Int. J. Therm. Sci. 2013, 63, 55–64. [Google Scholar] [CrossRef]
- Tan, F. Constrained and unconstrained melting inside a sphere. Int. Commun. Heat Mass Transf. 2008, 35, 466–475. [Google Scholar] [CrossRef]
- Tan, F.; Hosseinizadeh, S.; Khodadadi, J.; Fan, L. Experimental and computational study of constrained melting of phase change materials (PCM) inside a spherical capsule. Int. J. Heat Mass Transf. 2009, 52, 3464–3472. [Google Scholar] [CrossRef]
- Soni, V.; Kumar, A.; Jain, V.K. Modeling of PCM melting: Analysis of discrepancy between numerical and experimental results and energy storage performance. Energy 2018, 150, 190–204. [Google Scholar] [CrossRef]
- Kahwaji, S.; Johnson, M.B.; Kheirabadi, A.C.; Groulx, D.; White, M.A. A comprehensive study of properties of paraffin phase change materials for solar thermal energy storage and thermal management applications. Energy 2018, 162, 1169–1182. [Google Scholar] [CrossRef]
- Liu, B.; Yang, J.; Zhang, Z.; Yang, J.; Li, D. A phase change microactuator based on paraffin wax/expanded graphite/nickel particle composite with induction heating. Sens. Actuators A Phys. 2018, 275, 129–136. [Google Scholar] [CrossRef]
- Pal, R.; Burns, M.A. Self-contained actuation of phase-change pistons in microchannels. J. Micromech. Microeng. 2006, 16, 786–793. [Google Scholar] [CrossRef]
- Ye, X.L.; Jin, H.J. Sealing-free fast-response paraffin/nanoporous gold hybrid actuator. Nanotechnology 2017, 28, 385501. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoshikawa, I.; Yoshioka, K.; Murakami, G.; Yamazaki, A.; Tsuchiya, F.; Kagitani, M.; Sakanoi, T.; Terada, N.; Kimura, T.; Kuwabara, M.; et al. Extreme Ultraviolet Radiation Measurement for Planetary Atmospheres/Magnetospheres from the Earth-Orbiting Spacecraft (Extreme Ultraviolet Spectroscope for Exospheric Dynamics: EXCEED). Space Sci. Rev. 2014, 184, 237–258. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Values |
|---|---|---|
| Physical dimensions of BCM | / | (mm) |
| Weight of prototype in air | Ga | 720 g |
| Weight of the PCM filled in | m | 170 g |
| Weight of BCM in water | Gw | 80 g |
| Range of tension sensor | F | 0–4.9 N |
| Environmental stress | P1 | 0.1 MPa |
| Environment temperature | T0 | 20 °C |
| Voltage range of the power supply for heating | U | 0–48 V |
| Data acquisition frequency | / | 1 Hz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, J.; Zou, W.; Li, Z.; Gong, Y.; Burnashev, V.; Ning, D. Development and Experiments of an Electrothermal Driven Deep-Sea Buoyancy Control Module. Micromachines 2020, 11, 1017. https://doi.org/10.3390/mi11111017
Hou J, Zou W, Li Z, Gong Y, Burnashev V, Ning D. Development and Experiments of an Electrothermal Driven Deep-Sea Buoyancy Control Module. Micromachines. 2020; 11(11):1017. https://doi.org/10.3390/mi11111017
Chicago/Turabian StyleHou, Jiaoyi, Weifeng Zou, Zihao Li, Yongjun Gong, Vitalii Burnashev, and Dayong Ning. 2020. "Development and Experiments of an Electrothermal Driven Deep-Sea Buoyancy Control Module" Micromachines 11, no. 11: 1017. https://doi.org/10.3390/mi11111017