Experimental Research on Excitation Condition and Performance of Airflow-Induced Acoustic Piezoelectric Generator


Abstract
1. Introduction
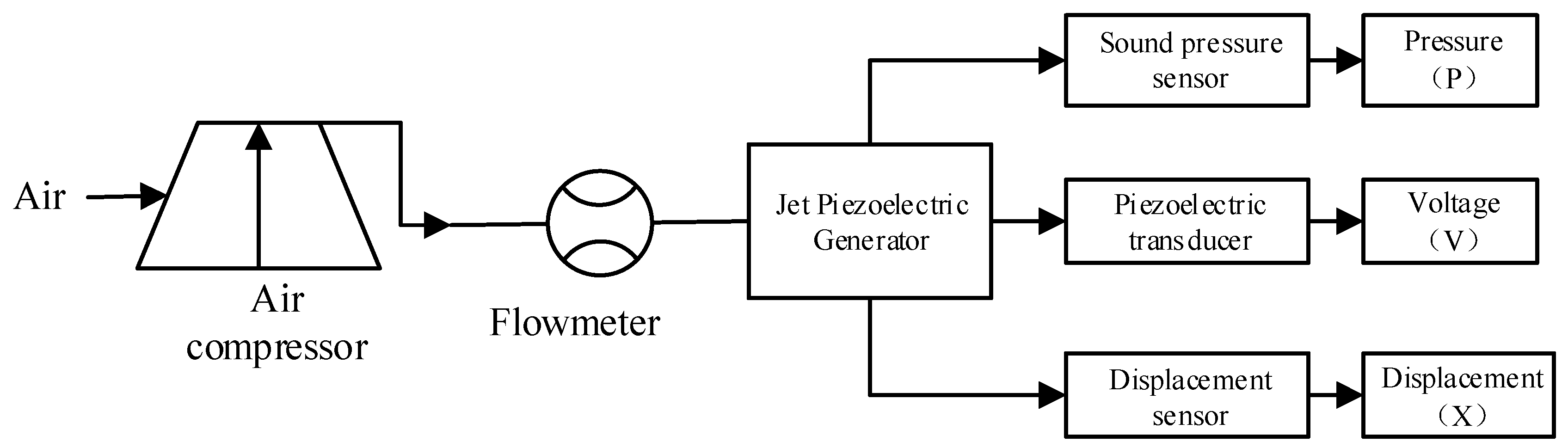
2. Composition and Working Principle of the Airflow-Induced Acoustic Generator System
3. Acoustic Frequency Calculation and Power Generation Performance Research
3.1. Conditions for Airflow-Induced Sound Waves
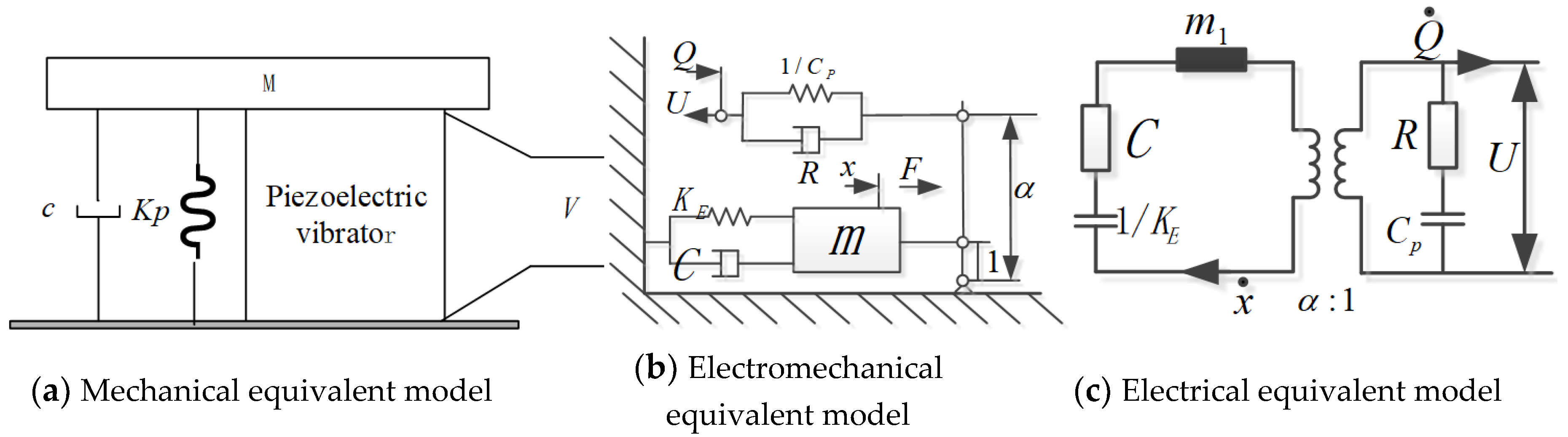
3.2. Vibration Model of Airflow-Induced Acoustic Piezoelectric Generator
4. Acoustic Performance Experiment
4.1. Airflow Induced Acoustic Frequency Experiment
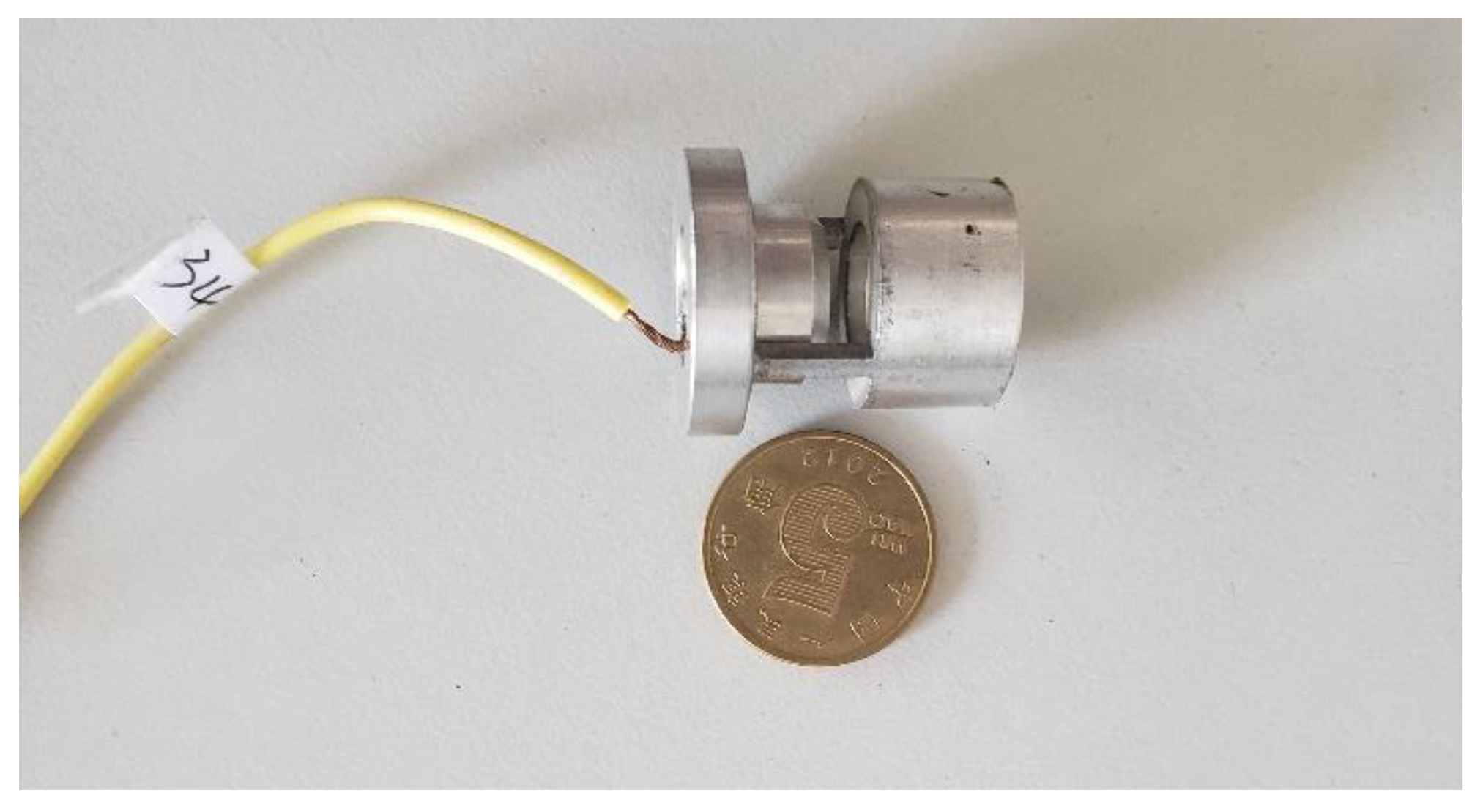
4.1.1. Experimental Prototype Parameters
4.1.2. Blowing Simulation Test System
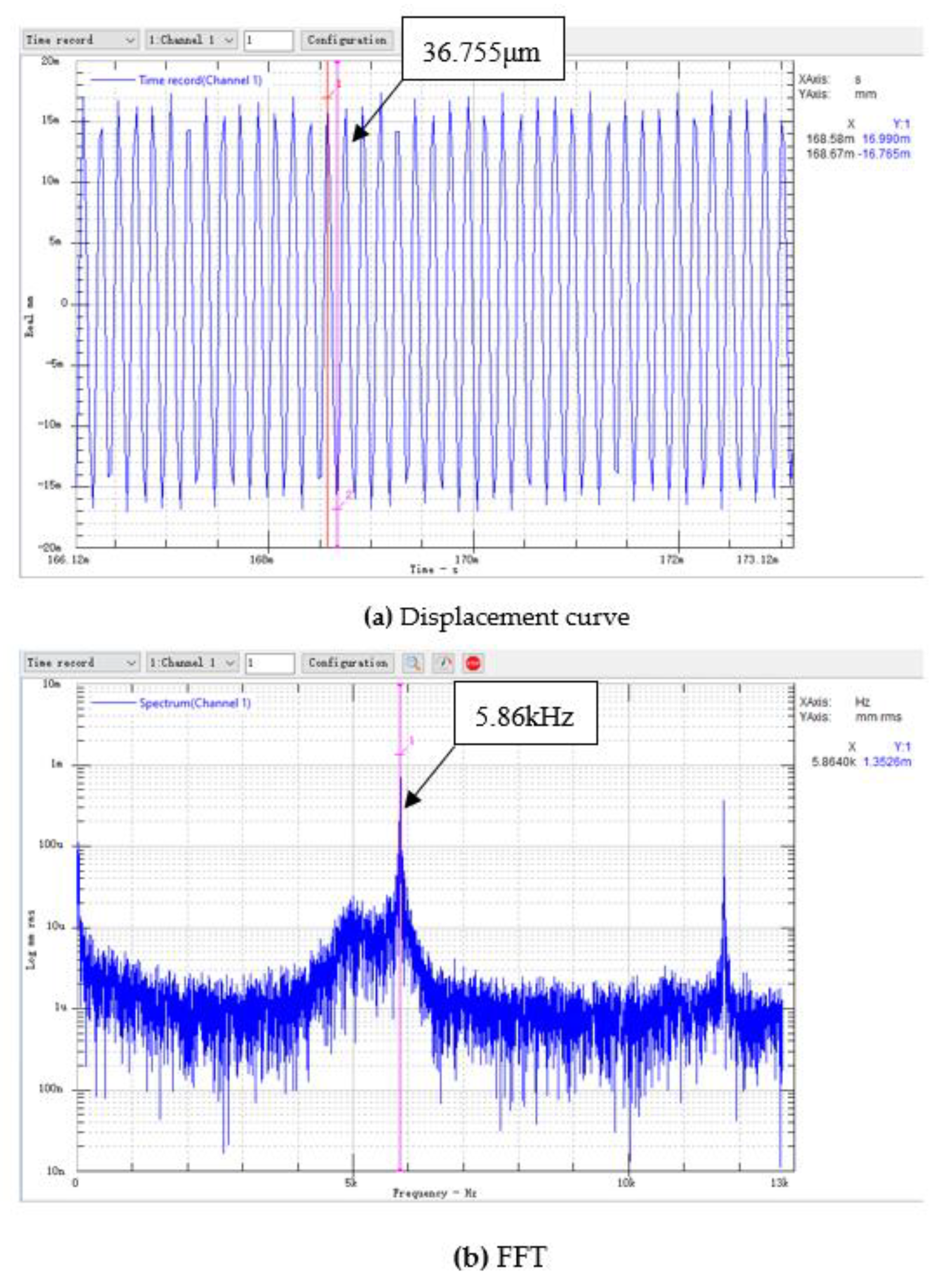
4.1.3. Sound Pressure Signal Detection
4.2. Experimental Analysis of Power Generation Performance
4.2.1. Experimental Verification of the Frequency Characteristics
4.2.2. Generated Power Conversion Efficiency
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhaowei, J. Research on the Control Technology for Generating Electric Energy from Low-Power Environmental Energy. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2020. [Google Scholar]
- Abdelkefi, A. Aeroelastic energy harvesting: A review. Int. J. Eng. Sci. 2016, 100, 112–135. [Google Scholar] [CrossRef]
- Rostami, A.B.; Armandei, M. Renewable energy harvesting by vortex-induced motions: Review and benchmarking of technologies. Renew. Sustain. Energy Rev. 2017, 70, 193–214. [Google Scholar] [CrossRef]
- Li, S.; Yuan, J.; Lipson, H. Ambient wind energy harvesting using cross-flow fluttering. J. Appl. Phys. 2011, 109, 26104. [Google Scholar] [CrossRef]
- Xingqiang, Z.; Junlei, W.; Jun, C. Research status of miniature wind energy collectors based on wind-induced vibration effects. J. Vib. Shock China 2017, 36, 106–112. [Google Scholar]
- Robbins, W.P.; Morris, D.; Marusic, I.; Novak, T.O. Wind-Generated Electrical Energy Using Flexible Piezoelectric Mateials; International Mechanical Engineering Congress and Exposition: Chicago, IL, USA, 2006; pp. 1–9. [Google Scholar]
- Akaydın, H.D.; Elvin, N.; Andreopoulos, Y.; Akaydin, H.D. Wake of a cylinder: A paradigm for energy harvesting with piezoelectric materials. Exp. Fluids 2010, 49, 291–304. [Google Scholar] [CrossRef]
- Perez, M.; Boisseau, S.; Gasnier, P.; Willemin, J.; Reboud, J.L. An electret-based aeroelastic flutter energy harvester. Smart Mater. Struct. 2015, 24, 035004. [Google Scholar] [CrossRef]
- Du, Z. Research on Micro Wind Turbine Based on Resonant Cavity Structure. Master’s Thesis, Chongqing University, Chongqing, China, 2012. [Google Scholar]
- Singh, K.; Michelin, S.; De Langre, E. Energy harvesting from axial fluid-elastic instabilities of a cylinder. J. Fluids Struct. 2012, 30, 159–172. [Google Scholar] [CrossRef]
- Dai, H.L.; Abdelkefi, A.; Yang, Y.; Wang, L. Orientation of bluff body for designing efficient energy harvesters from vortex-induced vibrations. Appl. Phys. Lett. 2014, 108, 053902. [Google Scholar] [CrossRef]
- Bryant, M.; Wolff, E.; Garcia, E. Aeroelastic flutter energy harvester design: The sensitivity of the driving instability to system parameters. Smart Mater. Struct. 2011, 20, 125017. [Google Scholar] [CrossRef]
- Hobbs, W.B. Piezoelectric Energy Harvesting: Vortex Induced Vibrations in Plants, Soap Films, and Arrays of Cylinders. Master’s Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2010; pp. 7–58. [Google Scholar]
- Weinstein, L.A.; Cacan, M.R.; So, P.M.; Wright, P.K. Vortex shedding induced energy harvesting from piezoelectric materials in heating, ventilation and air conditioning flows. Smart Mater. Struct. 2012, 21, 45003. [Google Scholar] [CrossRef]
- Clair, D.S.; Bibó, A.; Sennakesavababu, V.R.; Daqaq, M.F.; Li, G. A scalable concept for micropower generation using flow-induced self-excited oscillations. Appl. Phys. Lett. 2010, 96, 144103. [Google Scholar] [CrossRef]
- Dai, H.; Abdelkefi, A.; Wang, L. Piezoelectric energy harvesting from concurrent vortex-induced vibrations and base excitations. Nonlinear Dyn. 2014, 77, 967–981. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Nuhait, A.O. Modeling and performance analysis of cambered wing-based piezoaeroelastic energy harvesters. Smart Mater. Struct. 2013, 22, 95029. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Shahajhan, S.S.S. Power extraction from vortex-induced angular oscillations of elliptical cylinder. J. Fluids Struct. 2016, 63, 140–154. [Google Scholar] [CrossRef]
- Franzini, G.R.; Bunzel, L.O. A numerical investigation on piezoelectric energy harvesting from Vortex-Induced Vibrations with one and two degrees of freedom. J. Fluids Struct. 2018, 77, 196–212. [Google Scholar] [CrossRef]
- Sobhanirad, S.; Afsharfard, A. Improving application of galloping-based energy harvesters in realistic condition. Arch. Appl. Mech. 2018, 89, 313–328. [Google Scholar] [CrossRef]
- Wang, J.; Tang, L.; Zhao, L.; Zhang, Z. Efficiency investigation on energy harvesting from airflows in HVAC system based on galloping of isosceles triangle sectioned bluff bodies. Energy 2019, 172, 1066–1078. [Google Scholar] [CrossRef]
- Junming, L. Fuze airflow resonance piezoelectric generator. J. Detect. Control China 2009, 31, 23–26. [Google Scholar]
- Kim, S.-H.; Ji, C.-H.; Galle, P.; Herrault, F.; Wu, X.; Lee, J.-H.; Choi, C.-A.; Allen, M.G. An electromagnetic energy scavenger from direct airflow. J. Micromech. Microeng. 2009, 19, 94010. [Google Scholar] [CrossRef]
- Wei, X. Research on the Design of Fuze Micro-Electromechanical Airflow Excitation Power Supply Based on the Principle of Piezoelectric Power Generation. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2012. [Google Scholar]
- Zou, H. Research on Airflow-Induced Acoustic Vibration Technology of Small Vibrating Piezoelectric Generator. Ph.D. Thesis, Nanjing University of Science and Technology, Nanjing, China, 2015. [Google Scholar]
- Zou, H.; Chen, H.; Zhu, X. Piezoelectric energy harvesting from vibrations induced by jet-resonator system. Mechatronics 2015, 26, 29–35. [Google Scholar] [CrossRef]
- Zou, H.; Song, J.; Wang, Z.; Chen, H. The effects of structural parameters on excitation force of airflow vibration piezoelectric generator. J. Vibroeng. 2018, 20, 2393–2402. [Google Scholar] [CrossRef]
- Chen, H.; Wang, G.; Cai, J.; Sun, J.; Zou, H. Vibration model and frequency characteristics of the piezoelectric transducer in airflow-induced acoustic generator. J. Vibroeng. 2018, 20, 591–601. [Google Scholar] [CrossRef]
- Wang, X. Research on Jet Stream Strong Sound Device. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2005. [Google Scholar]
- Yang, Y. Research on Engine Pressure Oscillation Caused by Vortex Shedding. Master’s Thesis, Harbin Engineering University, Harbin, China, 2016. [Google Scholar]
- Chunhui, Z. Research on the Power Mechanism and Circuit of the Magnetic Recoil Fuze. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2012. [Google Scholar]
- Li, S. Introduction to Fuze, 1st ed.; Beijing Institute of Technology Press: Beijing, China, 2017; pp. 222–238. [Google Scholar]
- He, Z.; Li, H. Fuze Mechanism, 1st ed.; Beijing Institute of Technology Press: Beijing, China, 2014; pp. 222–238. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Prototype | L (mm) | H (mm) | X (mm) | D (mm) |
|---|---|---|---|---|
| 1# | 8 | 3 | 1 | 10 |
| 2# | 10 | 3 | 1 | 10 |
| 3# | 25 | 6 | 2.5 | 8 |
| 4# | 35 | 6 | 2.5 | 8 |
| Flow Velocity (m/s) | 1#Frequency (kHz) | 2#Frequency (kHz) | 3# Frequency (kHz) | 4# Frequency (kHz) |
|---|---|---|---|---|
| 53 | 0 | 5.64 | 0 | 2.12 |
| 64 | 0 | 5.88 | 2.94 | 2.09 |
| 74 | 6.27 | 5.98 | 2.95 | 2.07 |
| 85 | 6.56 | 6.06 | 2.9 | 2.08 |
| 96 | 6.72 | 6.1 | 2.89 | 2.1 |
| 106 | 6.91 | 6.12 | 2.88 | 2.12 |
| 117 | 7.05 | 6.22 | 2.88 | 2.12 |
| 127 | 7.24 | 6.23 | 2.88 | 2.13 |
| 138 | 7.42 | 6.26 | 2.88 | 2.13 |
| 149 | 7.55 | 6.28 | 2.88 | 2.13 |
| 159 | 7.59 | 6.452 | 2.9 | 2.12 |
| Experimental Prototype | V (m/s) | (%) | |||
|---|---|---|---|---|---|
| 1# | 110.27 | 6.929 | 6.94 | 0.011 | 0.16 |
| 2# | 90.67 | 6.022 | 5.96 | 0.062 | 1.04 |
| 3# | 85.57 | 2.918 | 2.85 | 0.068 | 2.38 |
| 4# | 60.28 | 2.086 | 2.13 | 0.044 | 2.07 |
| V (m/s) | u (v) | p (mW) | |
|---|---|---|---|
| 58.51 | 37.256 | 5682 | 18.1 |
| 69.15 | 52.246 | 5714 | 35.7 |
| 79.79 | 61.696 | 5747 | 45.1 |
| 90.43 | 56.855 | 5780 | 42.6 |
| 100.85 | 58.443 | 5814 | 45.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Li, J.; Chen, H. Experimental Research on Excitation Condition and Performance of Airflow-Induced Acoustic Piezoelectric Generator. Micromachines 2020, 11, 913. https://doi.org/10.3390/mi11100913
Li Z, Li J, Chen H. Experimental Research on Excitation Condition and Performance of Airflow-Induced Acoustic Piezoelectric Generator. Micromachines. 2020; 11(10):913. https://doi.org/10.3390/mi11100913
Chicago/Turabian StyleLi, Zhipeng, Jinghao Li, and Hejuan Chen. 2020. "Experimental Research on Excitation Condition and Performance of Airflow-Induced Acoustic Piezoelectric Generator" Micromachines 11, no. 10: 913. https://doi.org/10.3390/mi11100913
APA StyleLi, Z., Li, J., & Chen, H. (2020). Experimental Research on Excitation Condition and Performance of Airflow-Induced Acoustic Piezoelectric Generator. Micromachines, 11(10), 913. https://doi.org/10.3390/mi11100913