Design and Waveform Assessment of a Flexible-Structure-Based Inertia-Drive Motor



Abstract
:1. Introduction
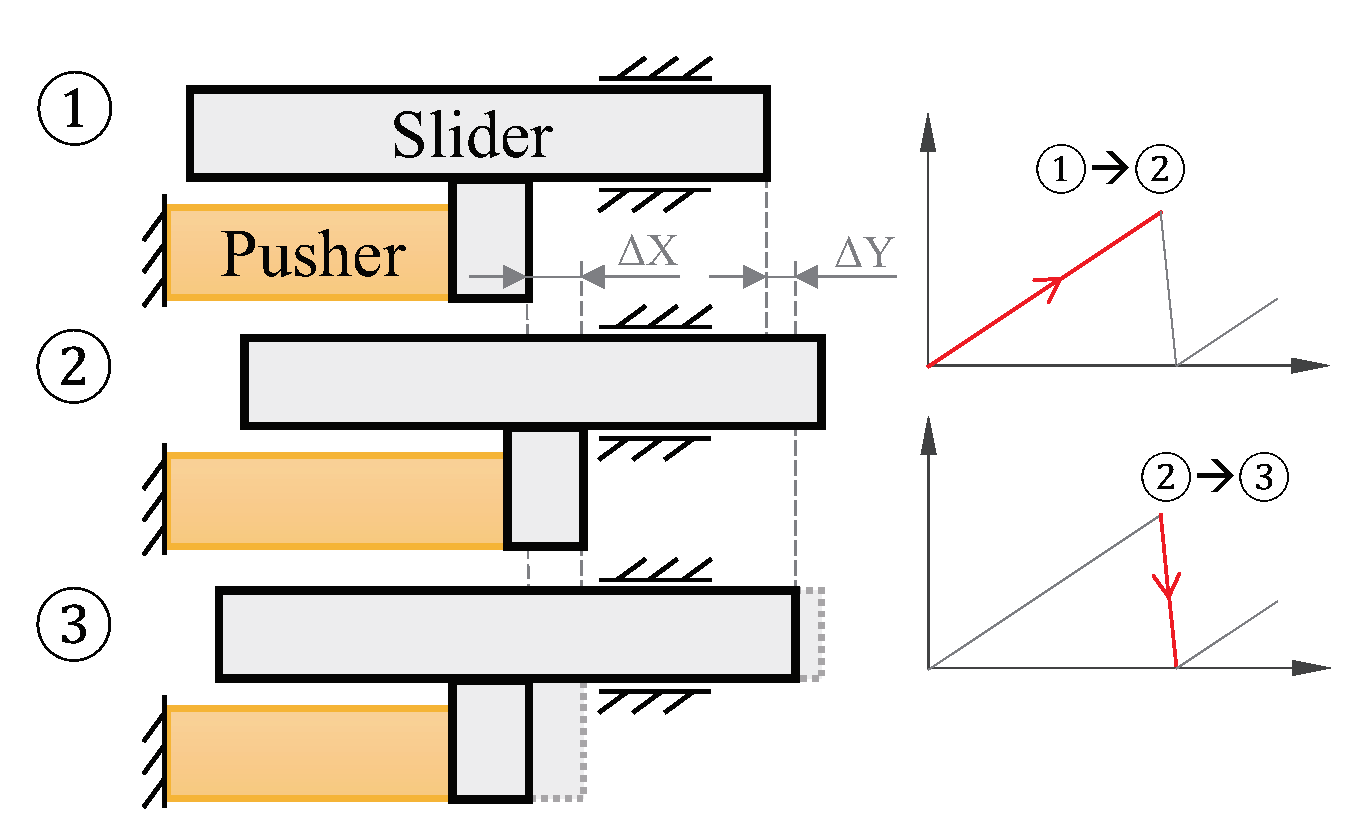
2. Driving Principle
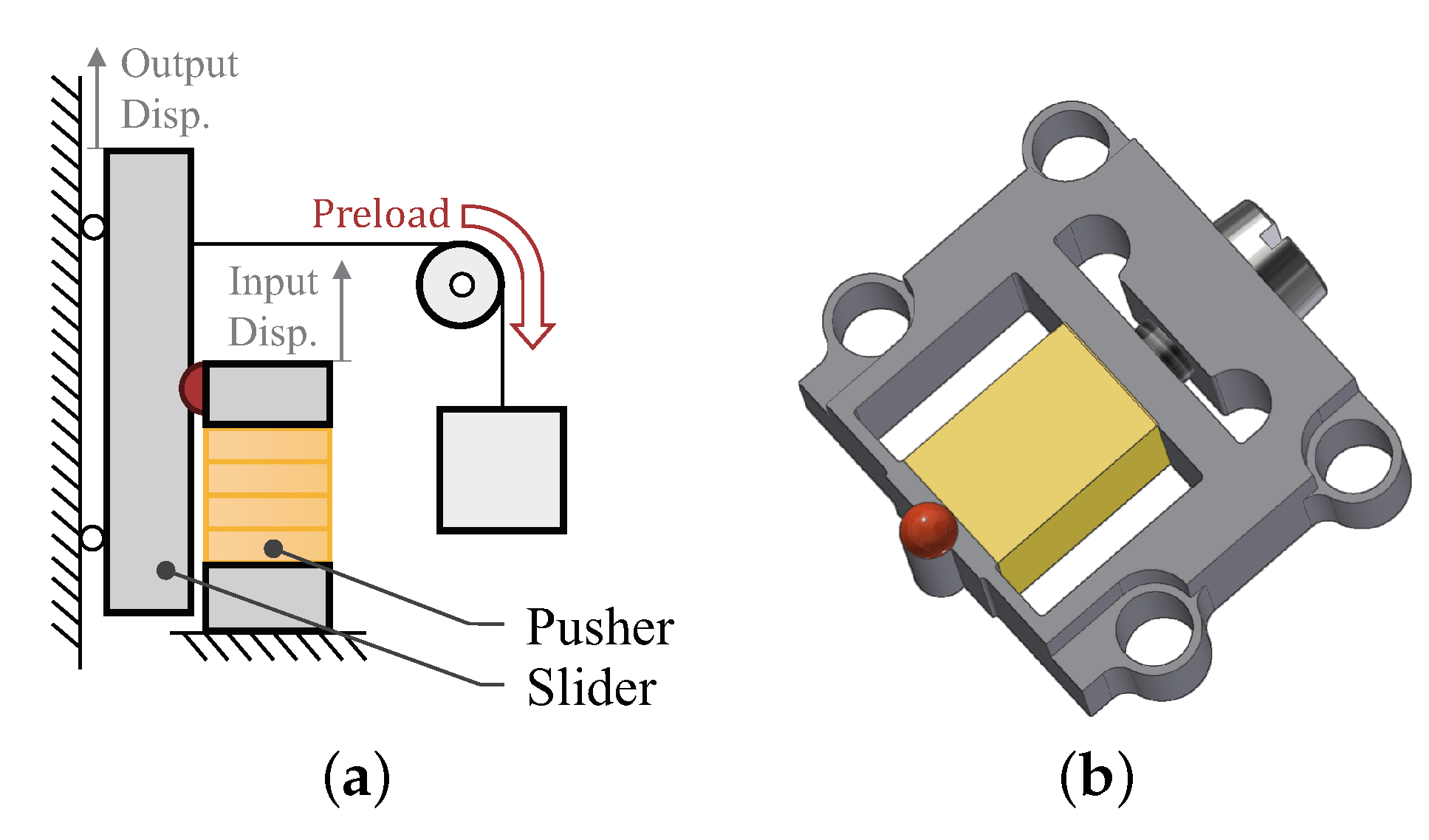
3. Mechanical Design
3.1. Design Consideration
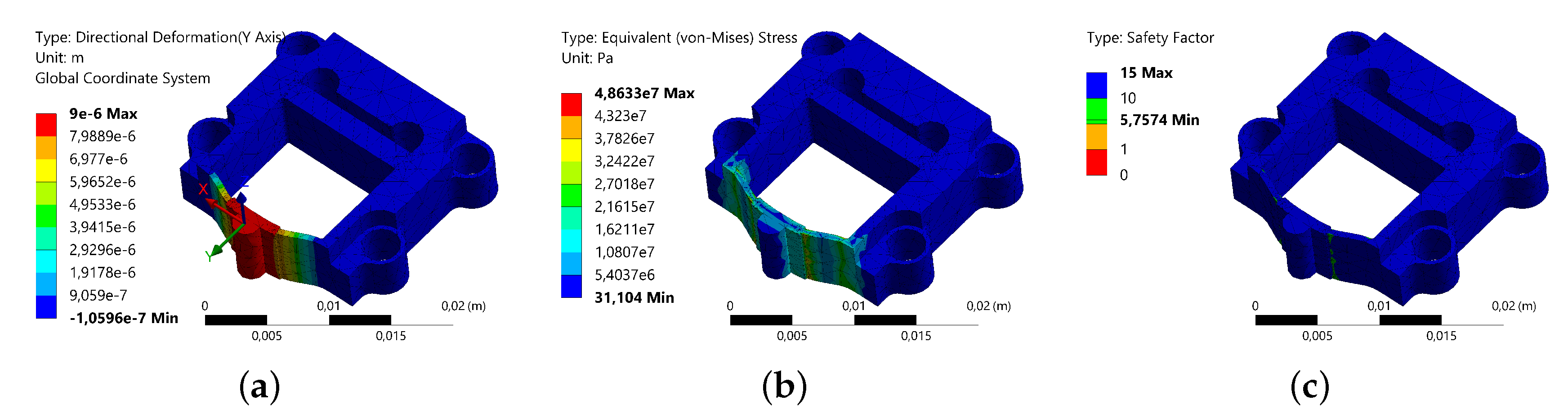
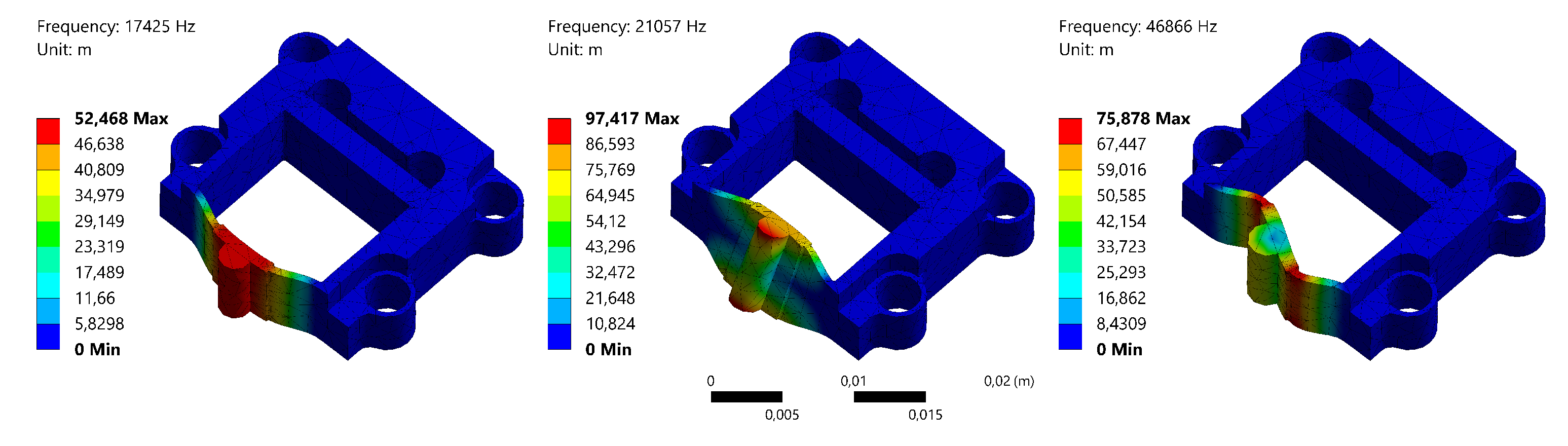
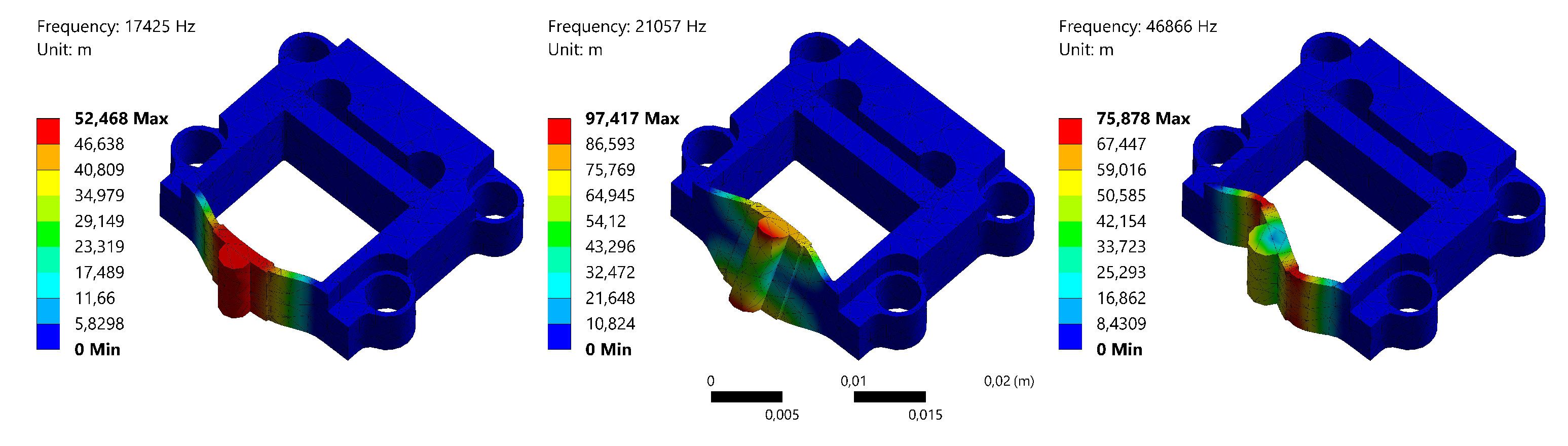
3.2. Finite Element Analysis
4. Experiments and Discussion
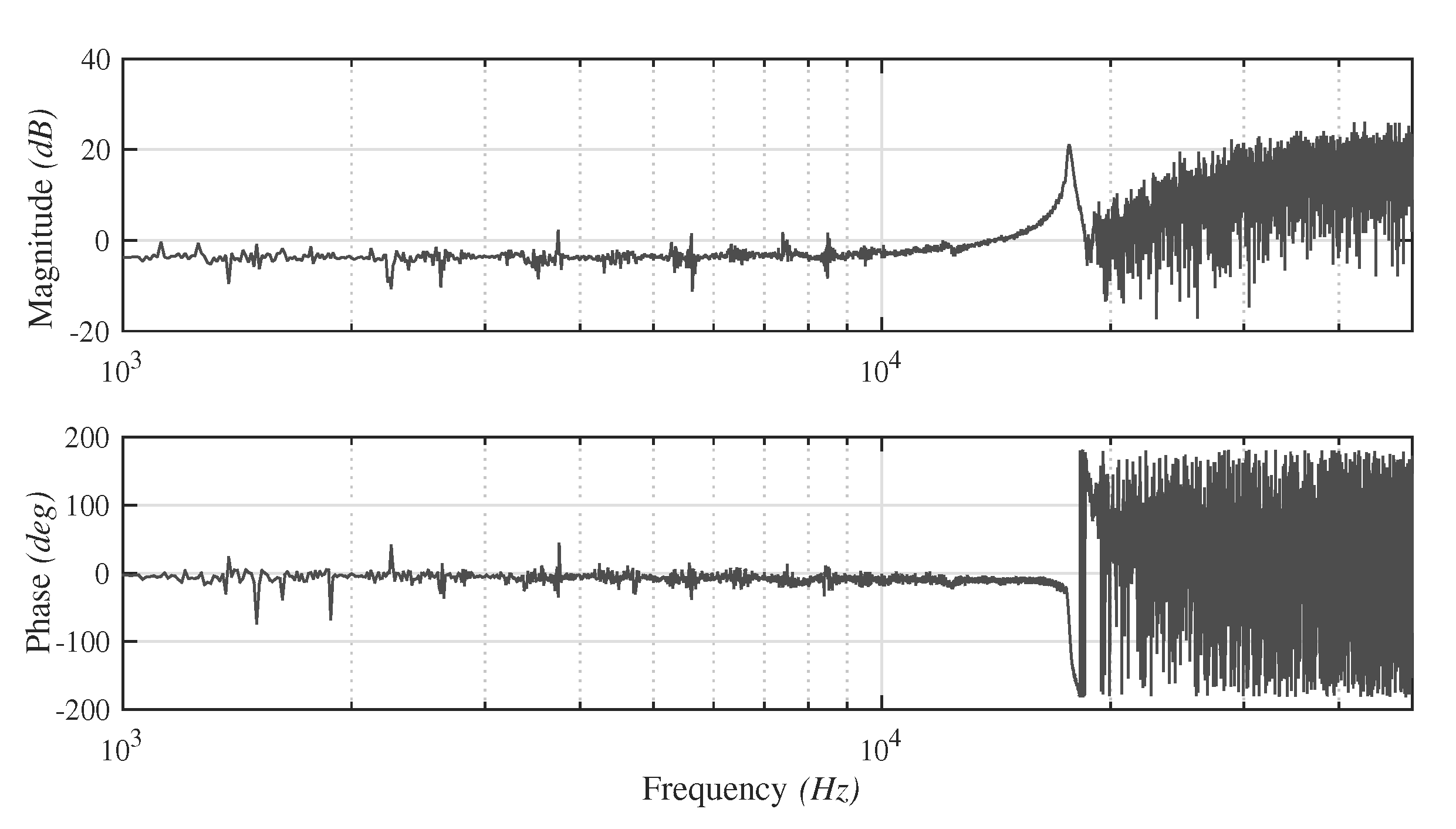
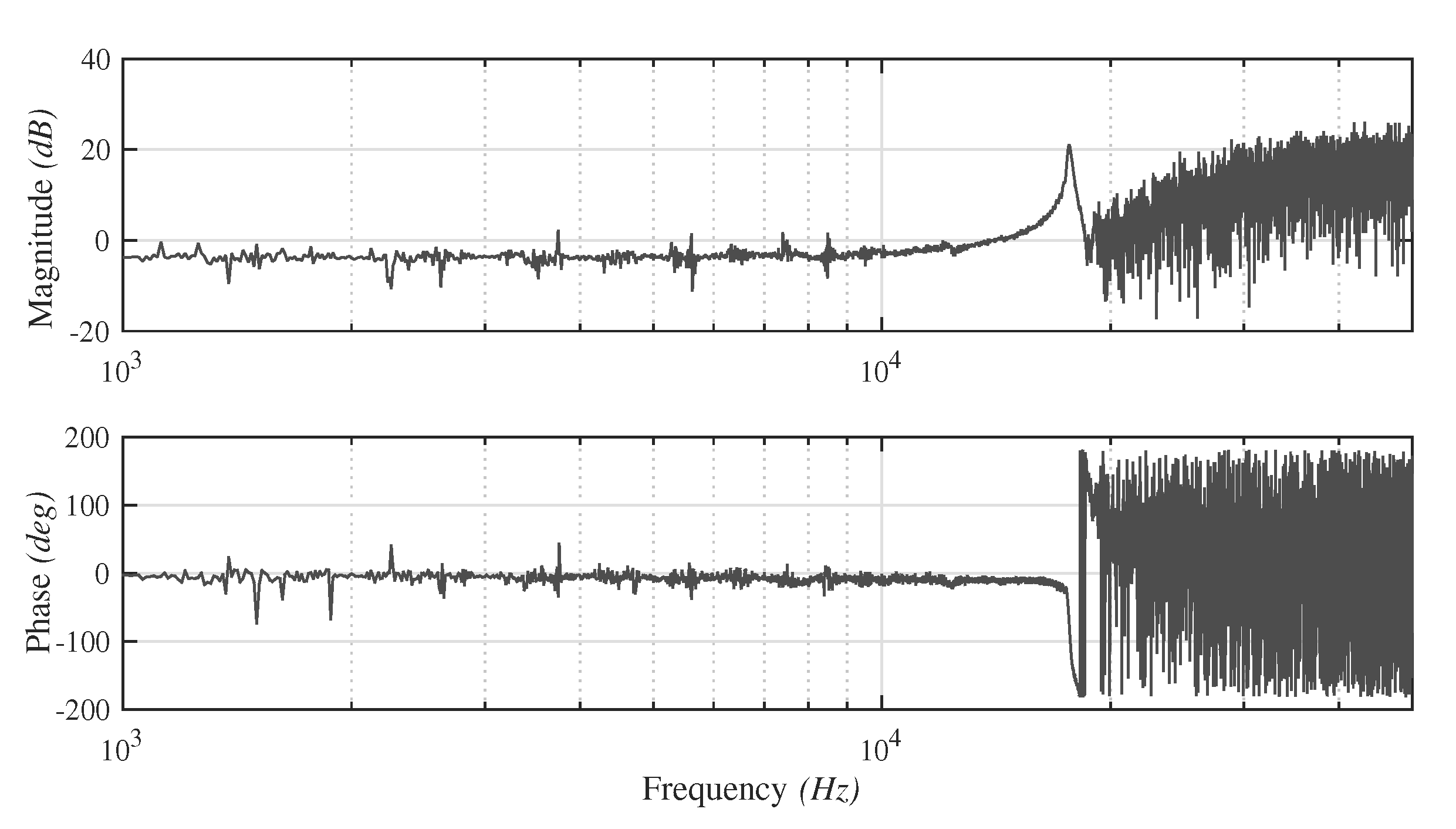
4.1. Identification and Modelling of the Pusher
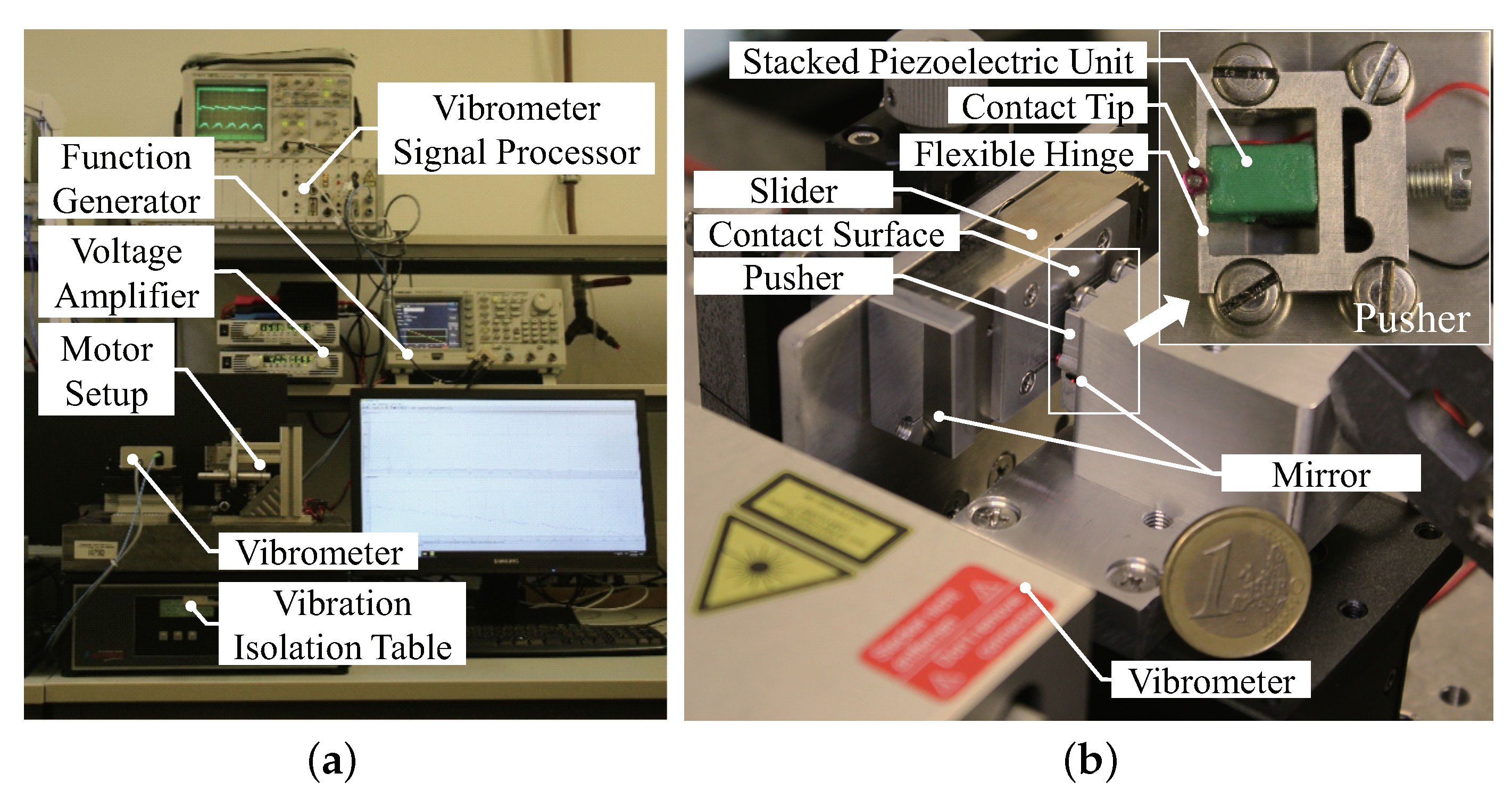
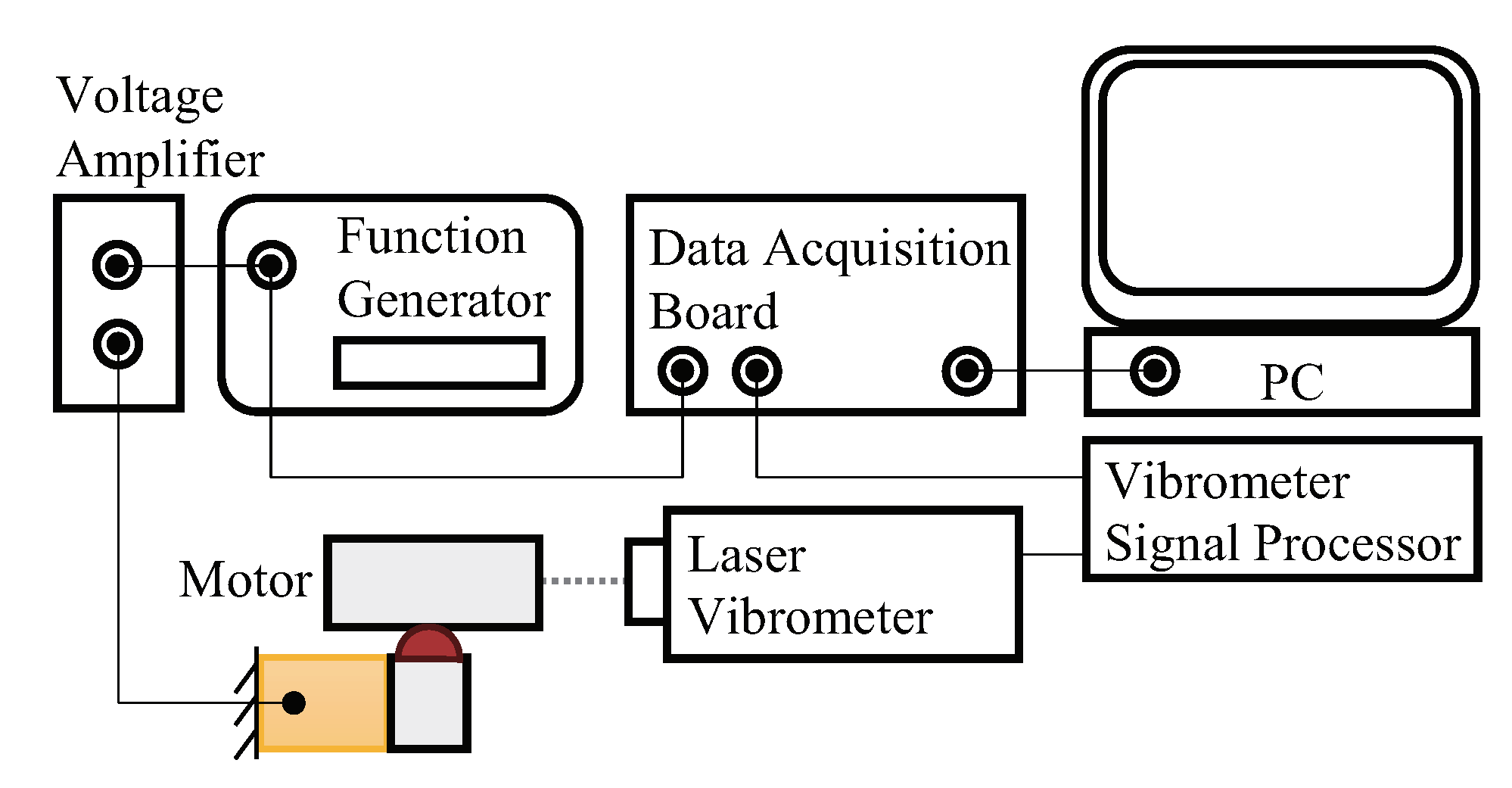
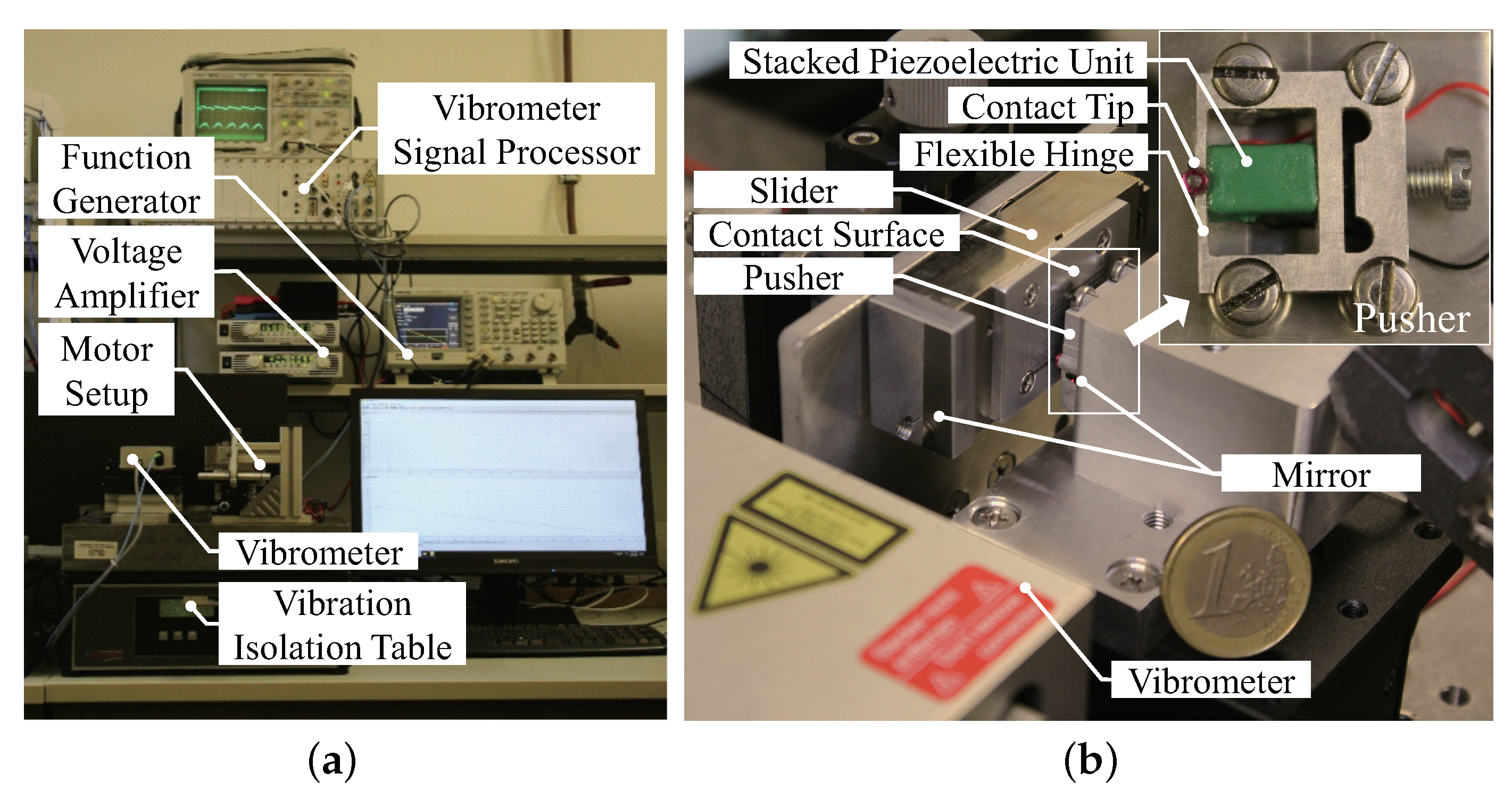
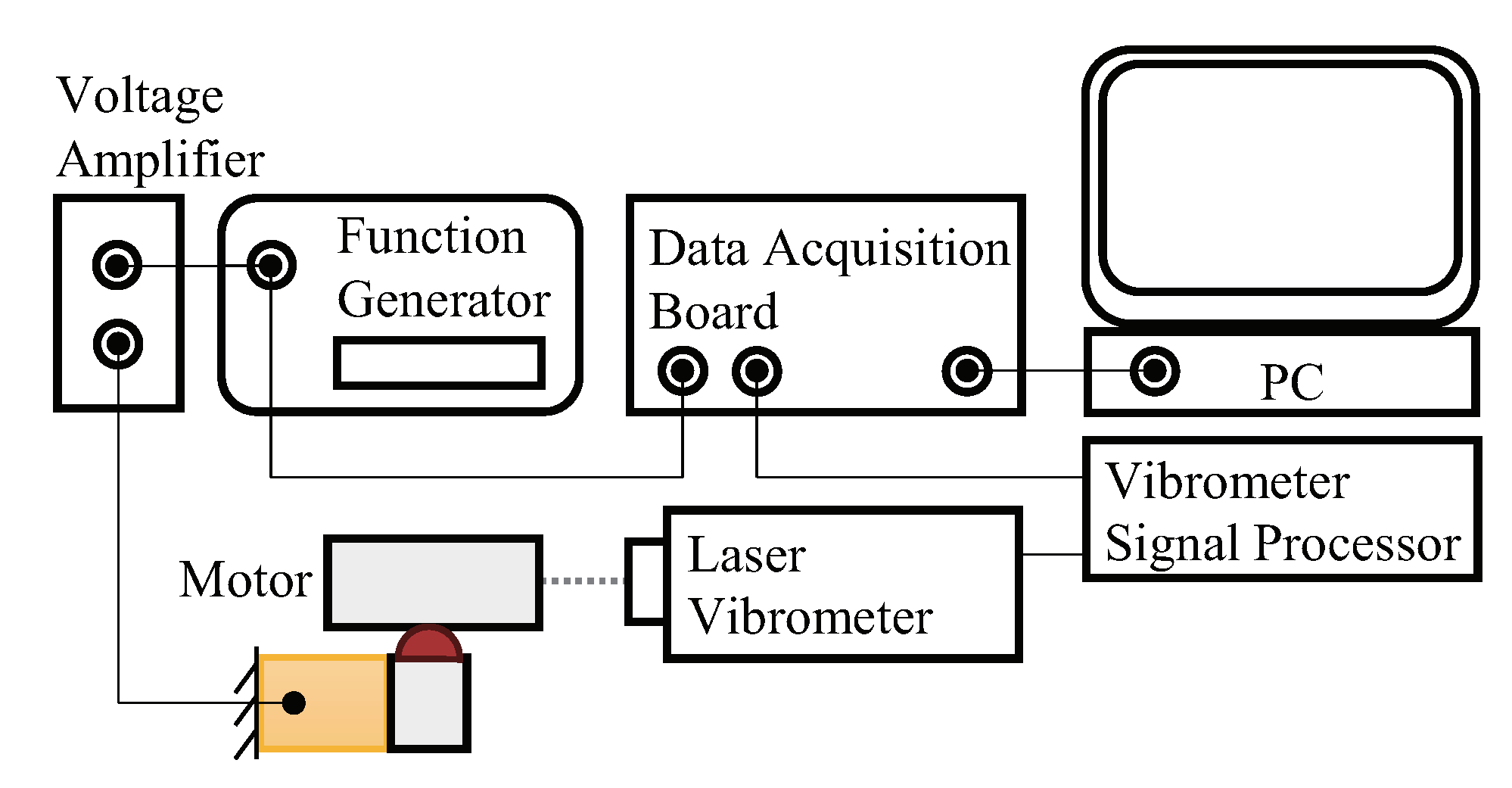
4.2. Experimental Setup
4.3. Results and Discussion
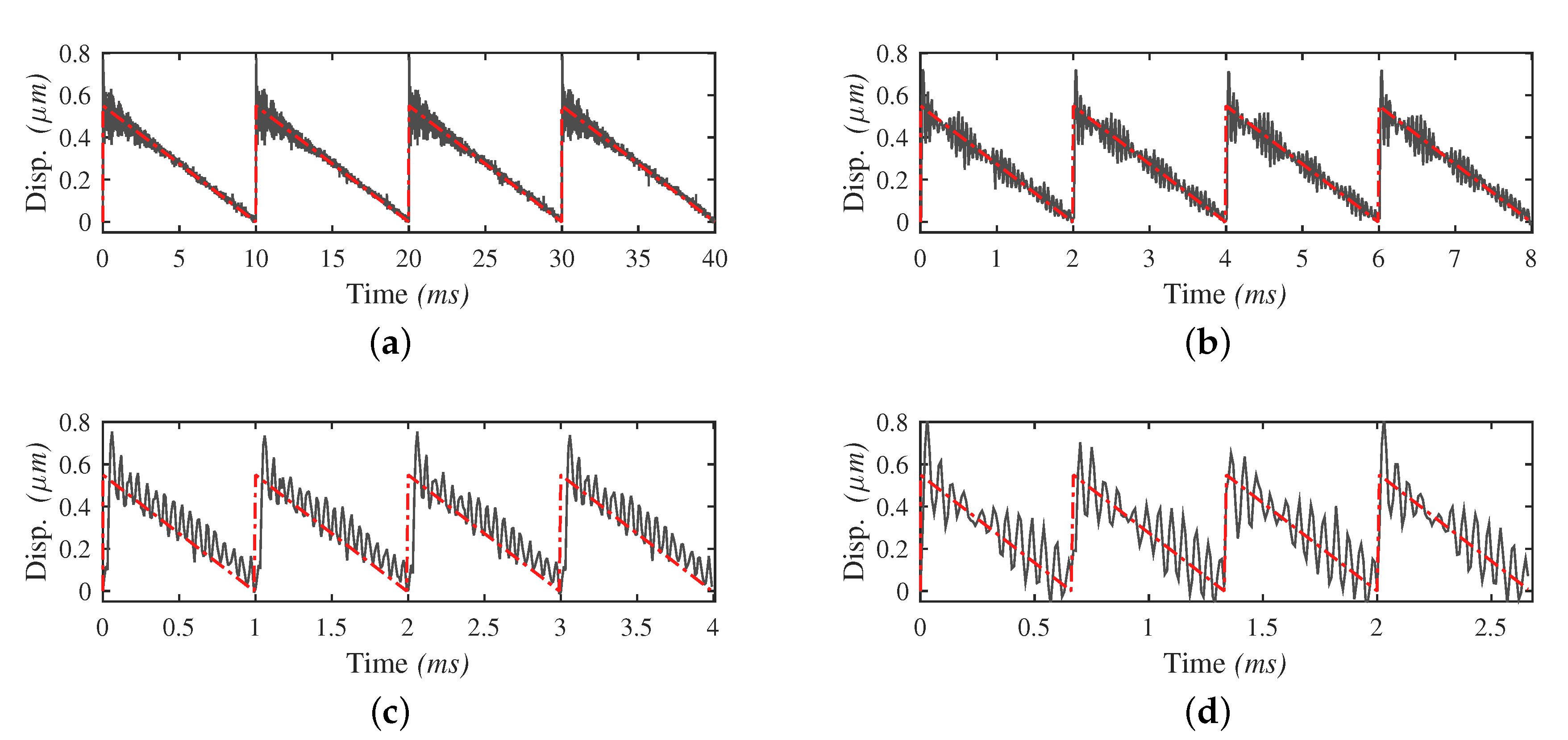
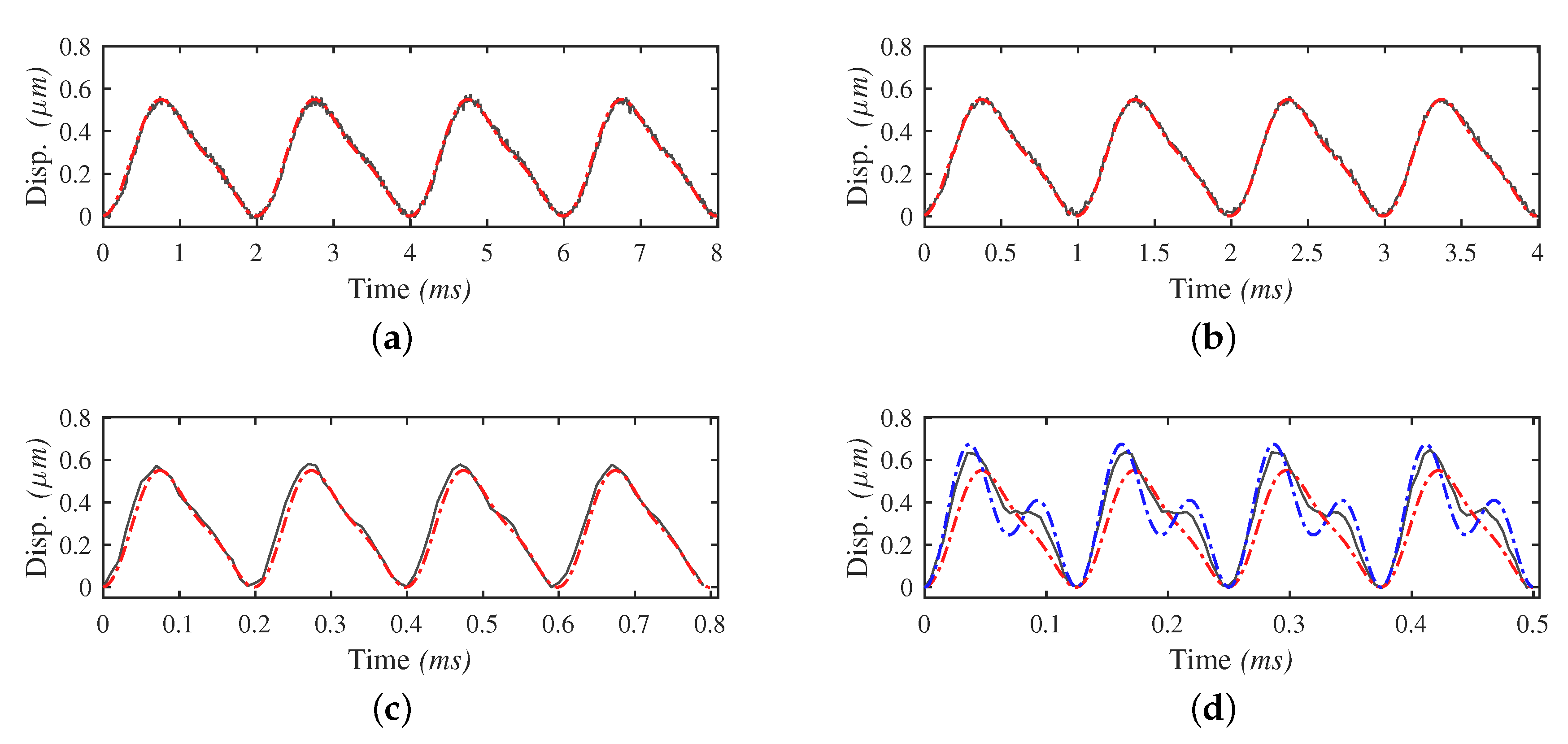
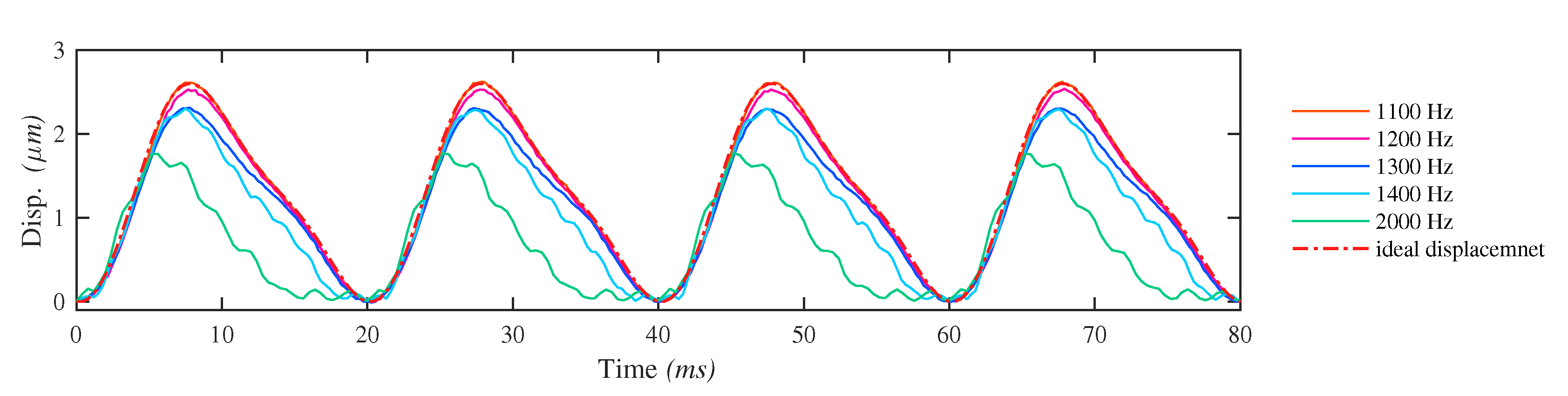
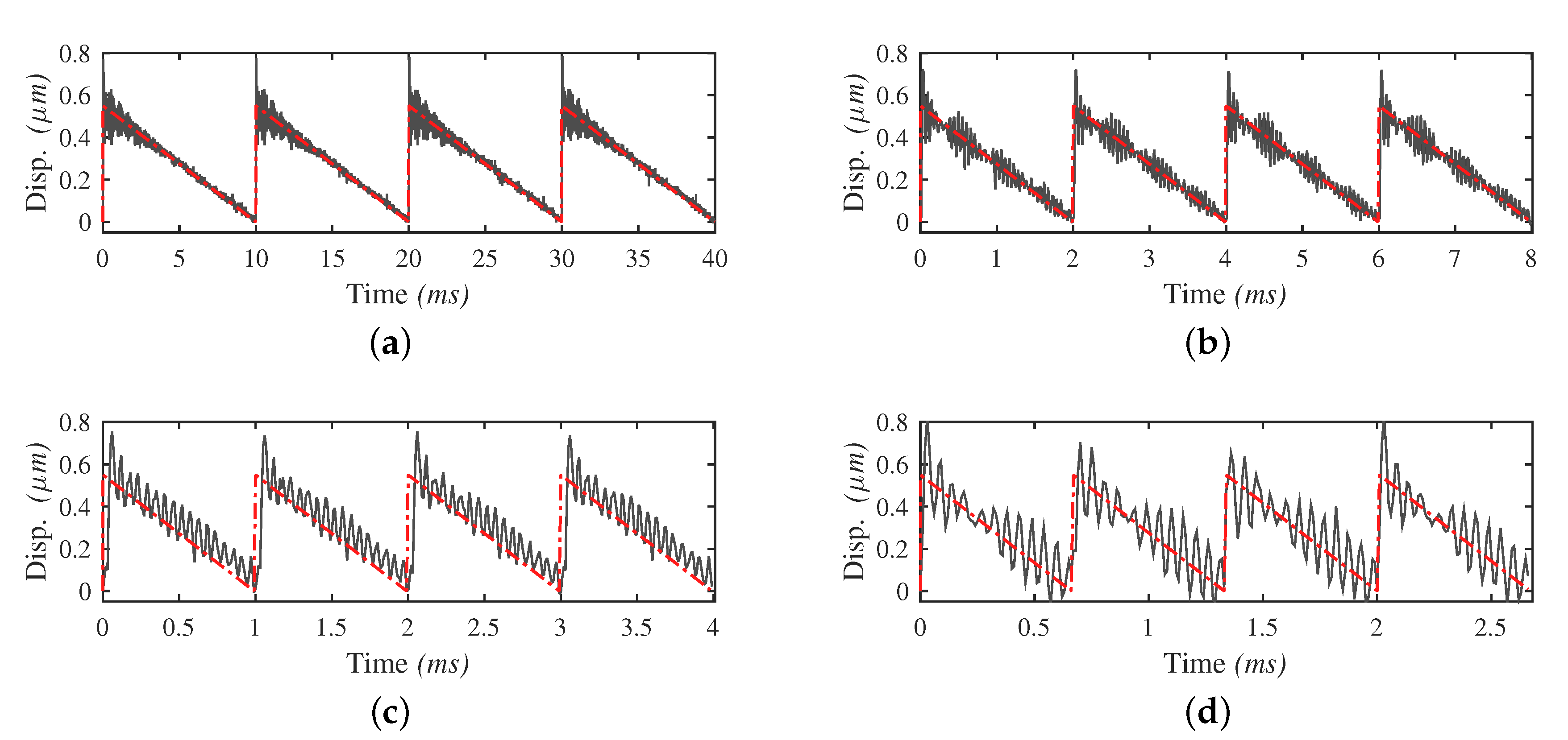
4.3.1. Input Displacement
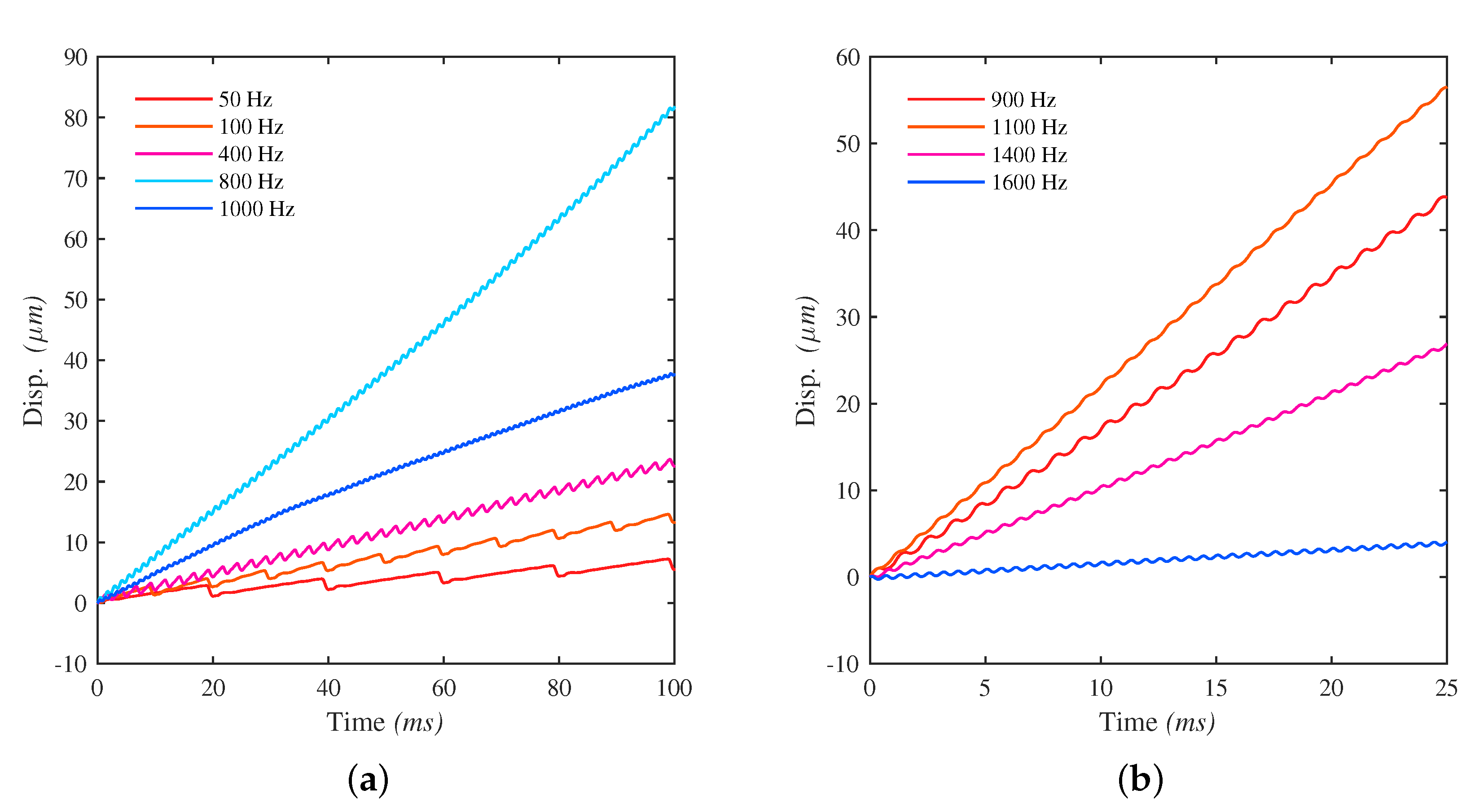
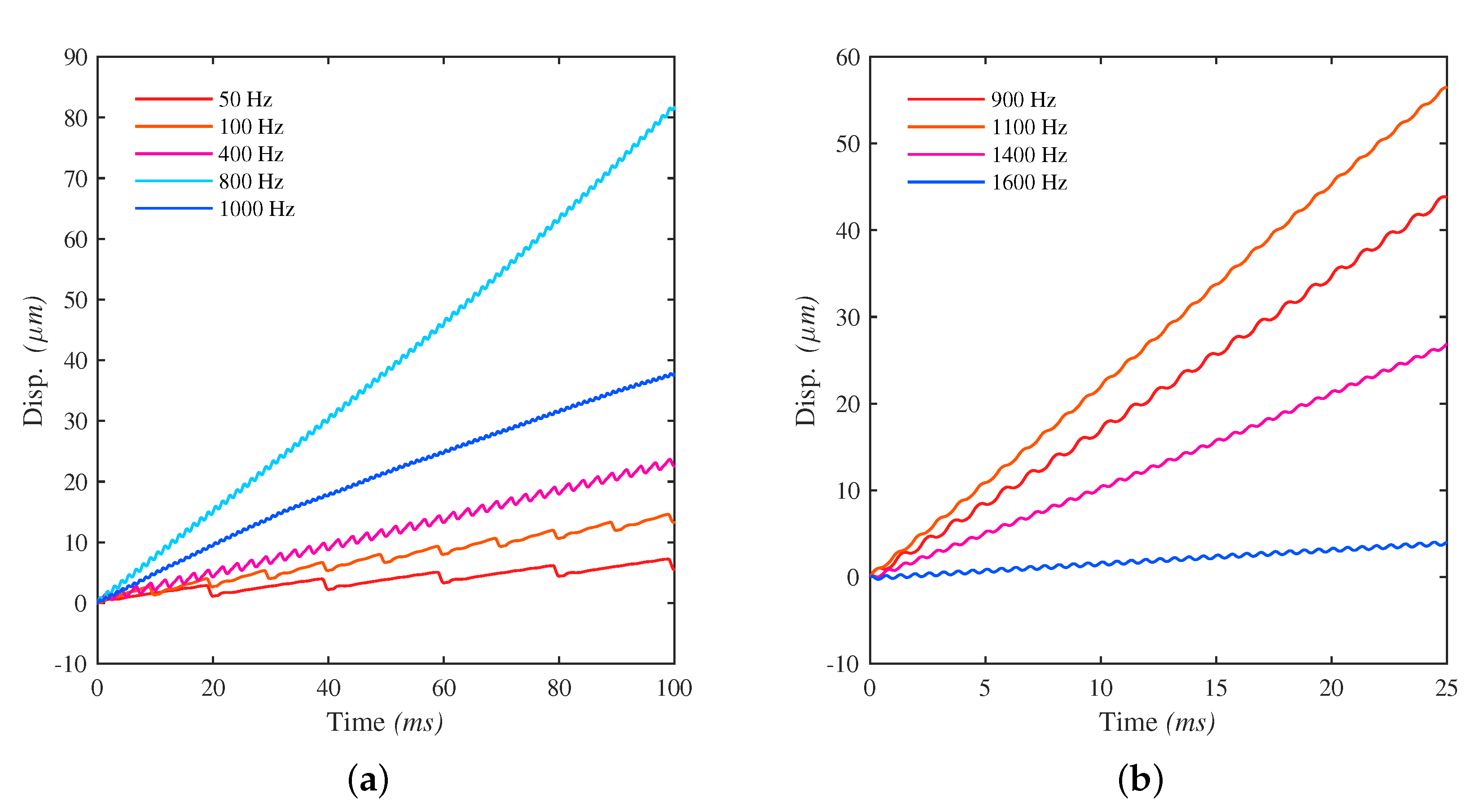
4.3.2. Output Displacement
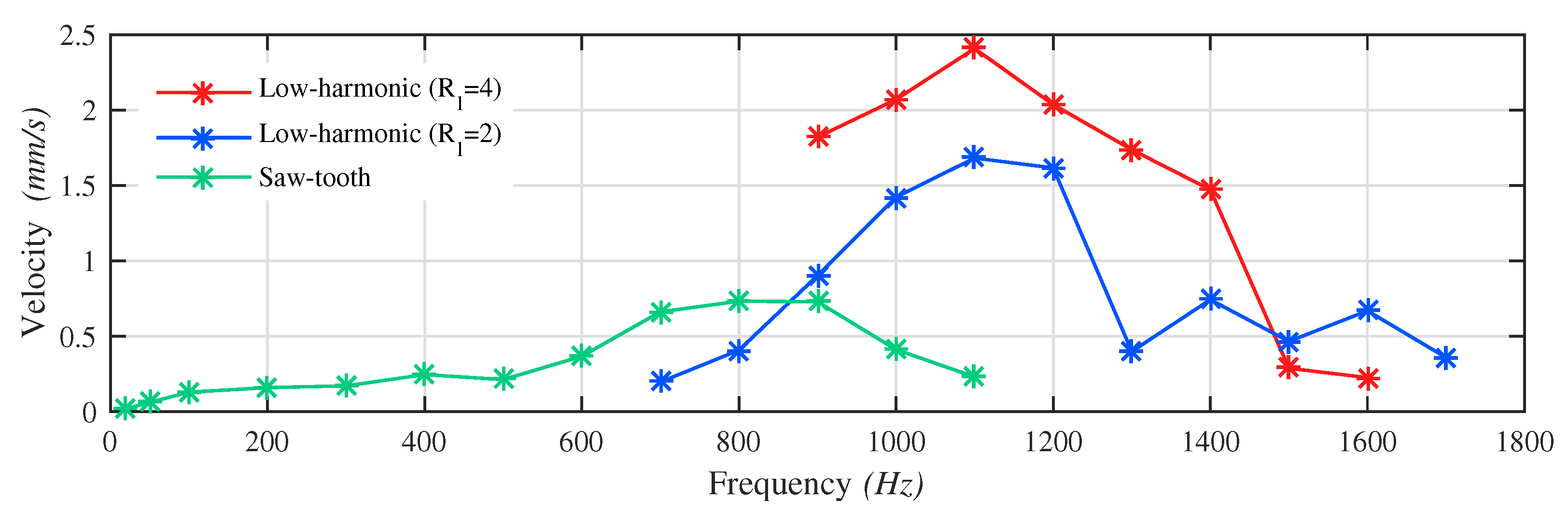
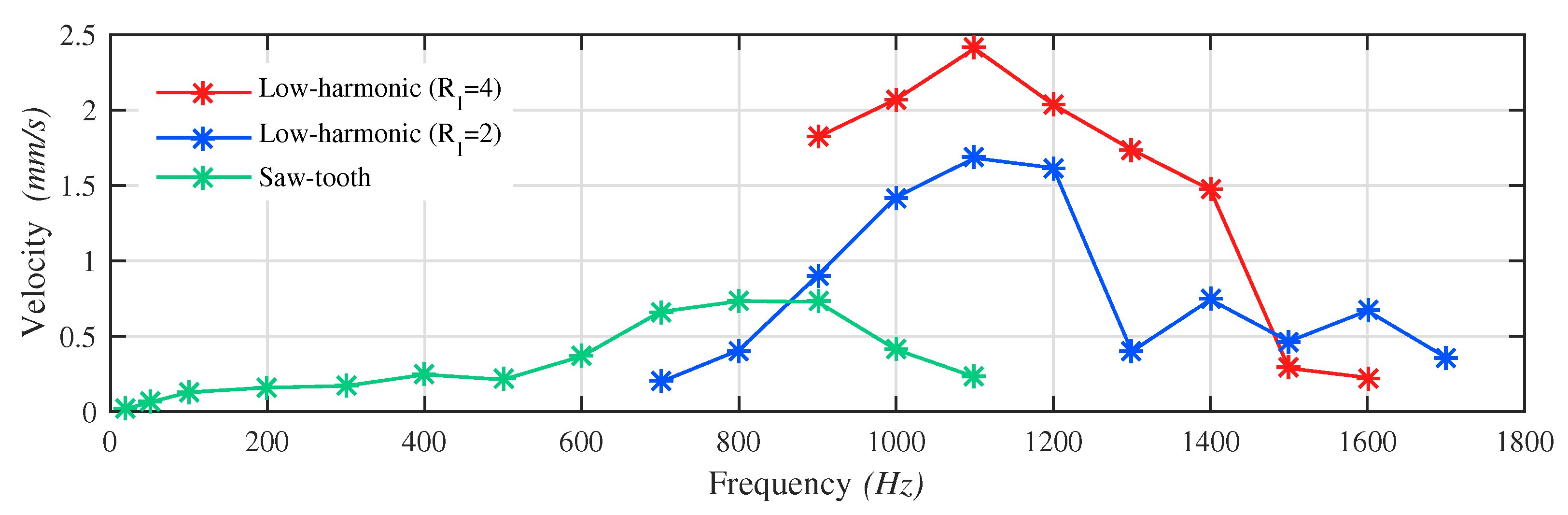
4.3.3. Discussion
- Why the setup does not have any output displacement utilizing 0.5 V LHW driving signals? The same question goes for the 2.3 V signals at frequencies lower than 900 Hz.
- Is it possible that the decline of the velocity, which represents the performance of LHWs in Figure 12, comes from residual vibrations excited by the waveform signals (rather than the unexpected distortion that is but one special example in this case)? Therefore, it may prove the mistake of the theory? If not, where does the distortion of the input displacement come from?
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| STW | Saw-Tooth Waveform |
| LHW | Low-Harmonic Waveform |
| FEA | Finite Element Analysis |
References
- Hunstig, M. Piezoelectric inertia motors—A critical review of history, concepts, design, applications, and perspectives. Actuators 2017, 6, 7. [Google Scholar] [CrossRef]
- Pan, P.; Yang, F.; Wang, Z.; Zhong, B.; Sun, L.; Ru, C. A review of stick–slip nanopositioning actuators. In Nanopositioning Technologies; Springer: Cham, Switzerland, 2016; pp. 1–32. [Google Scholar]
- Zhang, Z.; An, Q.; Li, J.; Zhang, W. Piezoelectric friction–inertia actuator—A critical review and future perspective. Int. J. Adv. Manuf. Technol. 2012, 62, 669–685. [Google Scholar] [CrossRef]
- Pohl, D.W. Dynamic piezoelectric translation devices. Rev. Sci. Instrum. 1987, 58, 54–57. [Google Scholar] [CrossRef]
- Bergander, A. Control, Wear Testing & Integration of Stick-Slip Micropositioning. Ph.D. Thesis, EPFL, Lausanne, Switzerland, 2004. [Google Scholar]
- Nguyen, H.X. Simulation, Validation and Optimization of Stick-Slip Drives for Nanorobotic Applications. Ph.D. Thesis, University Oldenburg, Oldenburg, Germany, 2014. [Google Scholar]
- Hunstig, M.; Hemsel, T.; Sextro, W. Stick-slip and slip-slip operation of piezoelectric inertia drives—Part II: Frequency-limited excitation. Sens. Actuators A Phys. 2013, 200, 79–89. [Google Scholar] [CrossRef]
- Cheng, T.; Li, H.; He, M.; Zhao, H.; Lu, X.; Gao, H. Investigation on driving characteristics of a piezoelectric stick–slip actuator based on resonant/off-resonant hybrid excitation. Smart Mater. Struct. 2017, 26, 035042. [Google Scholar] [CrossRef]
- Zhong, B.; Zhu, J.; Jin, Z.; He, H.; Sun, L.; Wang, Z. Improved inertial stick-slip movement performance via driving waveform optimization. Precis. Eng. 2019, 55, 260–267. [Google Scholar] [CrossRef]
- Zesch, W.; Buechi, R.; Codourey, A.; Siegwart, R.Y. Inertial drives for micro-and nanorobots: Two novel mechanisms. In Microrobotics and Micromechanical Systems; International Society for Optics and Photonics: Philadelphia, PA, USA, 1995; Volume 2593, pp. 80–88. [Google Scholar]
- Breguet, J.M.; Clavel, R. Stick and slip actuators: Design, control, performances and applications. In Proceedings of the 1998 International Symposium on Micromechatronics and Human Science-Creation of New Industry-(Cat. No. 98TH8388)—MHA’98, Nagoya, Japan, 25–28 November 1998; pp. 89–95. [Google Scholar]
- Chang, S.; Li, S. A high resolution long travel friction-drive micropositioner with programmable step size. Rev. Sci. Instrum. 1999, 70, 2776–2782. [Google Scholar] [CrossRef]
- Bergander, A.; Driesen, W.; Varidel, T.; Breguet, J.M. Monolithic piezoelectric push-pull actuators for inertial drives. In Proceedings of the 2003 International Symposium on Micromechatronics and Human Science (IEEE Cat. No. 03TH8717)—MHS2003, Nagoya, Japan, 19–22 October 2003; pp. 309–316. [Google Scholar]
- Wischnewskiy, W. Piezoelectric Adjusting Element. U.S. Patent 6,765,335, 20 July 2004. [Google Scholar]
- Edeler, C.; Jasper, D.; Fatikow, S. Development, control and evaluation of a mobile platform for microrobots. IFAC Proc. Vol. 2008, 41, 12739–12744. [Google Scholar] [CrossRef]
- Li, J.; Huang, H.; Zhao, H. A piezoelectric-driven linear actuator by means of coupling motion. IEEE Trans. Ind. Electron. 2017, 65, 2458–2466. [Google Scholar] [CrossRef]
- Wei, J.; Fatikow, S.; Zhang, X.; Haenssler, O.C. Design and experimental evaluation of a compliant mechanism-based stepping-motion actuator with multi-mode. Smart Mater. Struct. 2018, 27, 105014. [Google Scholar] [CrossRef]
- Zhou, M.; Fan, Z.; Ma, Z.; Zhao, H.; Guo, Y.; Hong, K.; Li, Y.; Liu, H.; Wu, D. Design and experimental research of a novel stick-slip type piezoelectric actuator. Micromachines 2017, 8, 150. [Google Scholar] [CrossRef]
- Yong, Y.K.; Aphale, S.S.; Moheimani, S.R. Design, identification, and control of a flexure-based XY stage for fast nanoscale positioning. IEEE Trans. Nanotechnol. 2008, 8, 46–54. [Google Scholar] [CrossRef]
- Yong, Y.K.; Bazaei, A.; Moheimani, S.R. Video-rate Lissajous-scan atomic force microscopy. IEEE Trans. Nanotechnol. 2013, 13, 85–93. [Google Scholar] [CrossRef]
- Yoshida, R. Development of smooth impact drive mechanism; 2nd report. J. Jpn. Soc. Precis. Eng. 2002, 68, 536–542. [Google Scholar] [CrossRef]
- Nishimura, T.; Hosaka, H.; Morita, T. Resonant-type smooth impact drive mechanism (SIDM) actuator using a bolt-clamped Langevin transducer. Ultrasonics 2012, 52, 75–80. [Google Scholar] [CrossRef] [PubMed]
- Morita, T.; Murakami, H.; Yokose, T.; Hosaka, H. A miniaturized resonant-type smooth impact drive mechanism actuator. Sens. Actuators A Phys. 2012, 178, 188–192. [Google Scholar] [CrossRef]
- Pan, Q.S.; He, L.G.; Pan, C.L.; Xiao, G.J.; Feng, Z.H. Resonant-type inertia linear motor based on the harmonic vibration synthesis of piezoelectric bending actuator. Sens. Actuators A Phys. 2014, 209, 169–174. [Google Scholar] [CrossRef]
- Young, W.C.; Budynas, R.G.; Sadegh, A.M. Roark’s Formulas for Stress and Strain; McGraw-Hill: New York, NY, USA, 2002; Volume 7. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension (mm) | Stroke (m) | Stiffness (N/m) | Resonance Frequency (kHz) |
|---|---|---|---|
| 9 | 120 | 100 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, J.; Fatikow, S.; Li, H.; Zhang, X. Design and Waveform Assessment of a Flexible-Structure-Based Inertia-Drive Motor. Micromachines 2019, 10, 771. https://doi.org/10.3390/mi10110771
Wei J, Fatikow S, Li H, Zhang X. Design and Waveform Assessment of a Flexible-Structure-Based Inertia-Drive Motor. Micromachines. 2019; 10(11):771. https://doi.org/10.3390/mi10110771
Chicago/Turabian StyleWei, Junyang, Sergej Fatikow, Hai Li, and Xianmin Zhang. 2019. "Design and Waveform Assessment of a Flexible-Structure-Based Inertia-Drive Motor" Micromachines 10, no. 11: 771. https://doi.org/10.3390/mi10110771
APA StyleWei, J., Fatikow, S., Li, H., & Zhang, X. (2019). Design and Waveform Assessment of a Flexible-Structure-Based Inertia-Drive Motor. Micromachines, 10(11), 771. https://doi.org/10.3390/mi10110771