Supervised Classification of Power Lines from Airborne LiDAR Data in Urban Areas




Abstract
1. Introduction
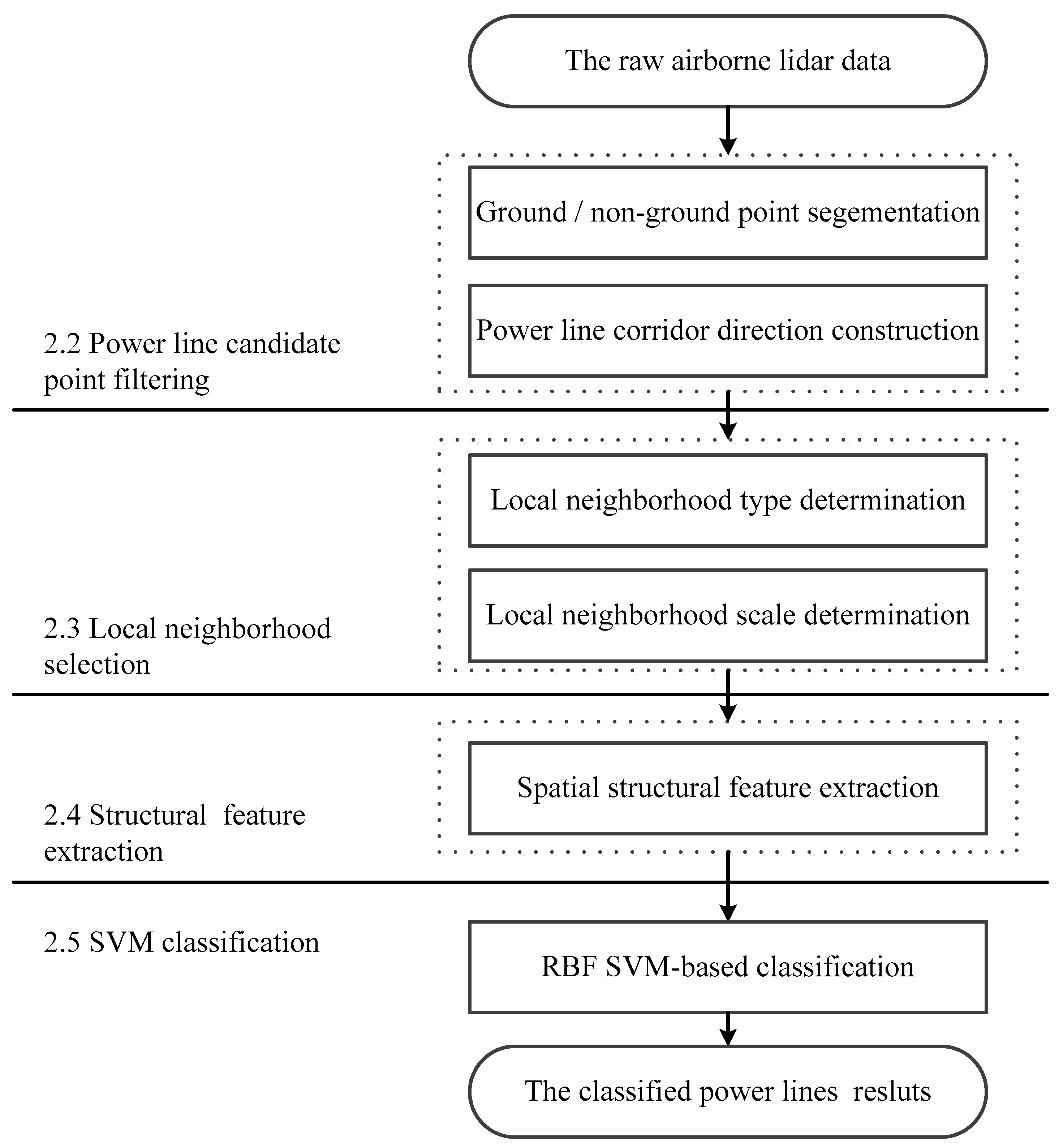
2. Materials and Methods
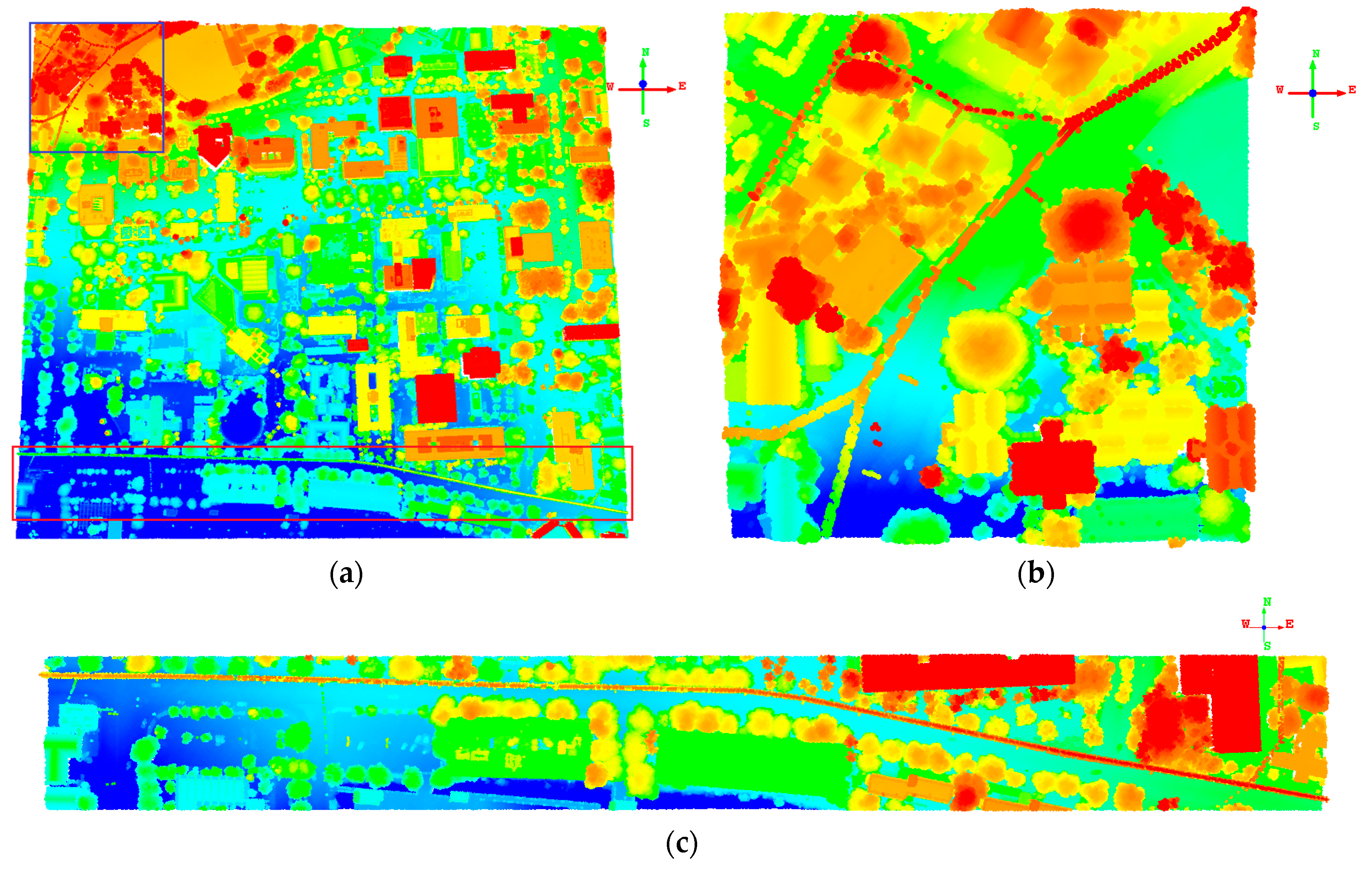
2.1. Dataset
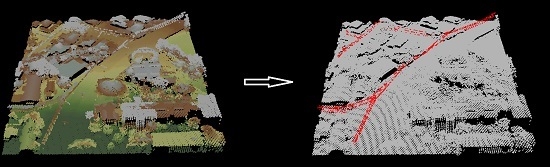
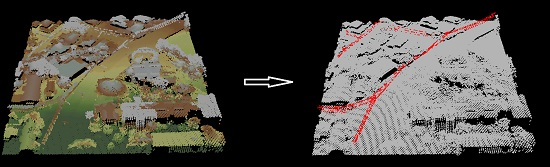
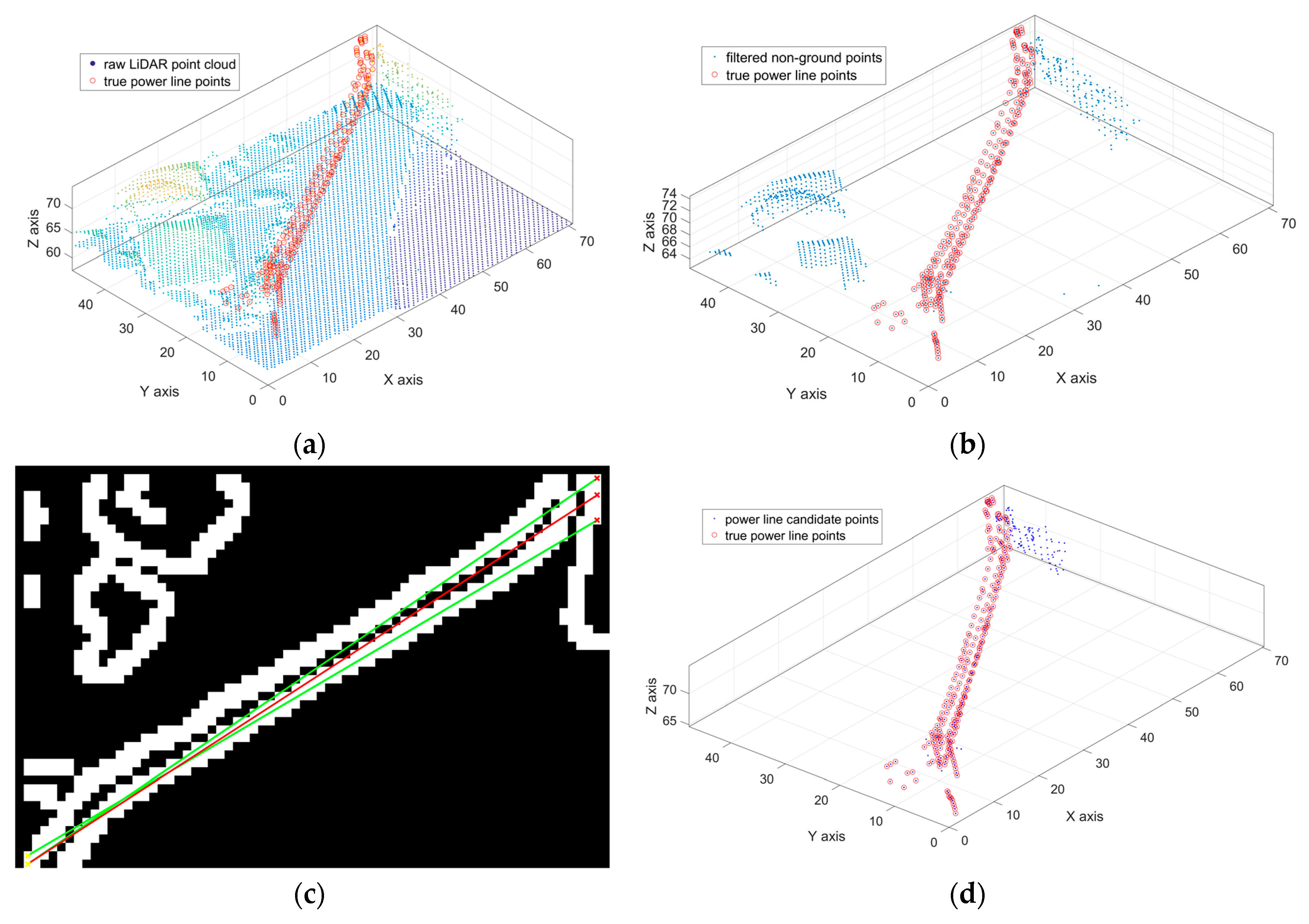
2.2. Power Line Candidate Filtering
2.2.1. Ground Points and Non-Ground Points Filtering
2.2.2. Power Line Corridor Direction Construction
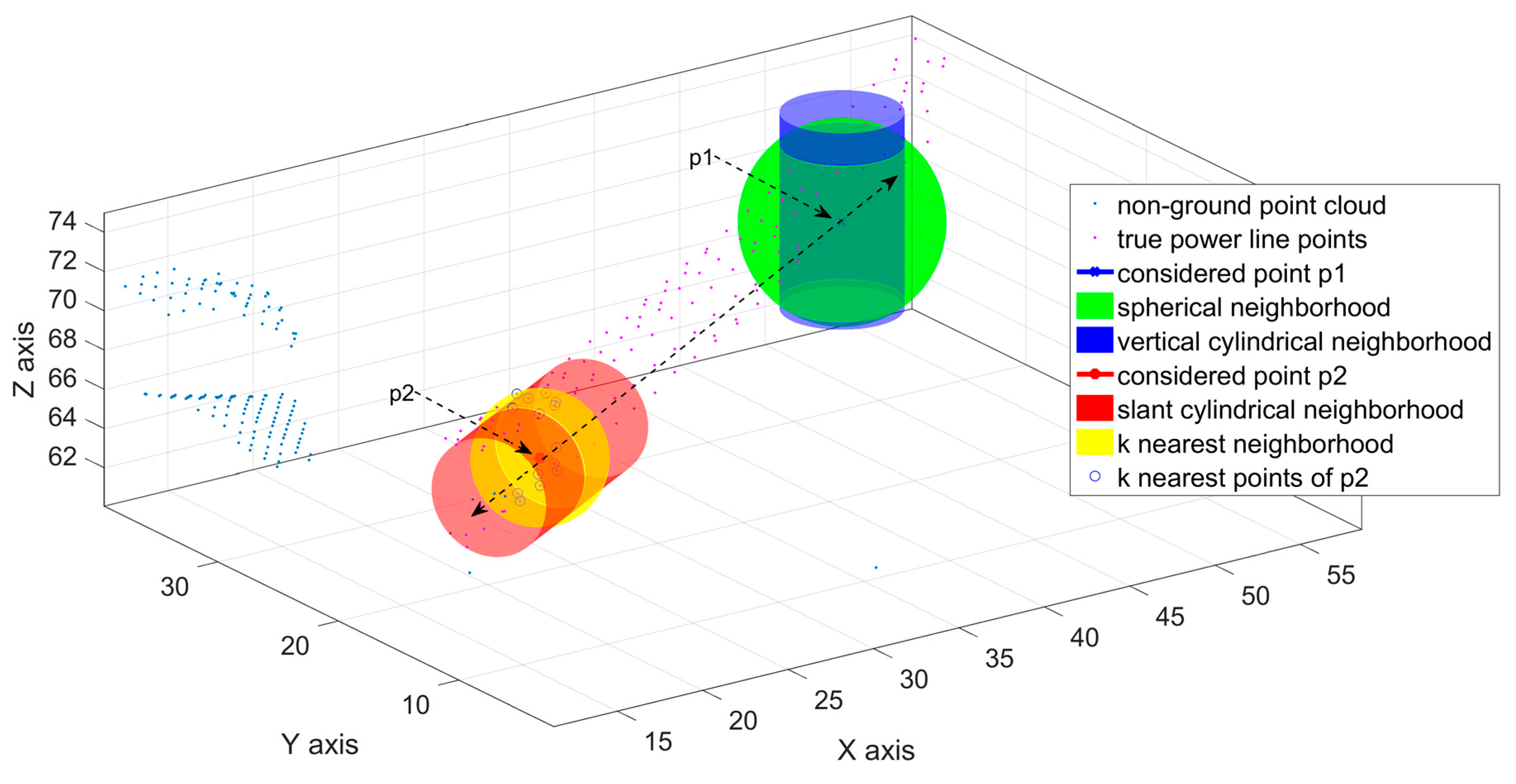
2.3. Local Neighborhood Selection
2.3.1. Neighborhood Type Determination
- a spherical neighborhood is formed by all 3D points within a sphere around point P, which is parameterized with a fixed radius,
- a vertical cylindrical neighborhood is formed by all 3D points within a vertical cylindrical whose axis vertically passes through point P and whose radius is fixed,
- a k nearest neighborhood is formed by the nearest neighbors of considered point P, the k is its parameter, and
- a slant cylindrical neighborhood is formed by all 3D points with a slant cylindrical whose radius is fixed and whose axis passes through considered point P along with the direction of power line corridor.
2.3.2. Neighborhood Scale Selection
2.4. Spatial Structural Feature Extraction
2.5. SVM Classification
2.6. Experiments
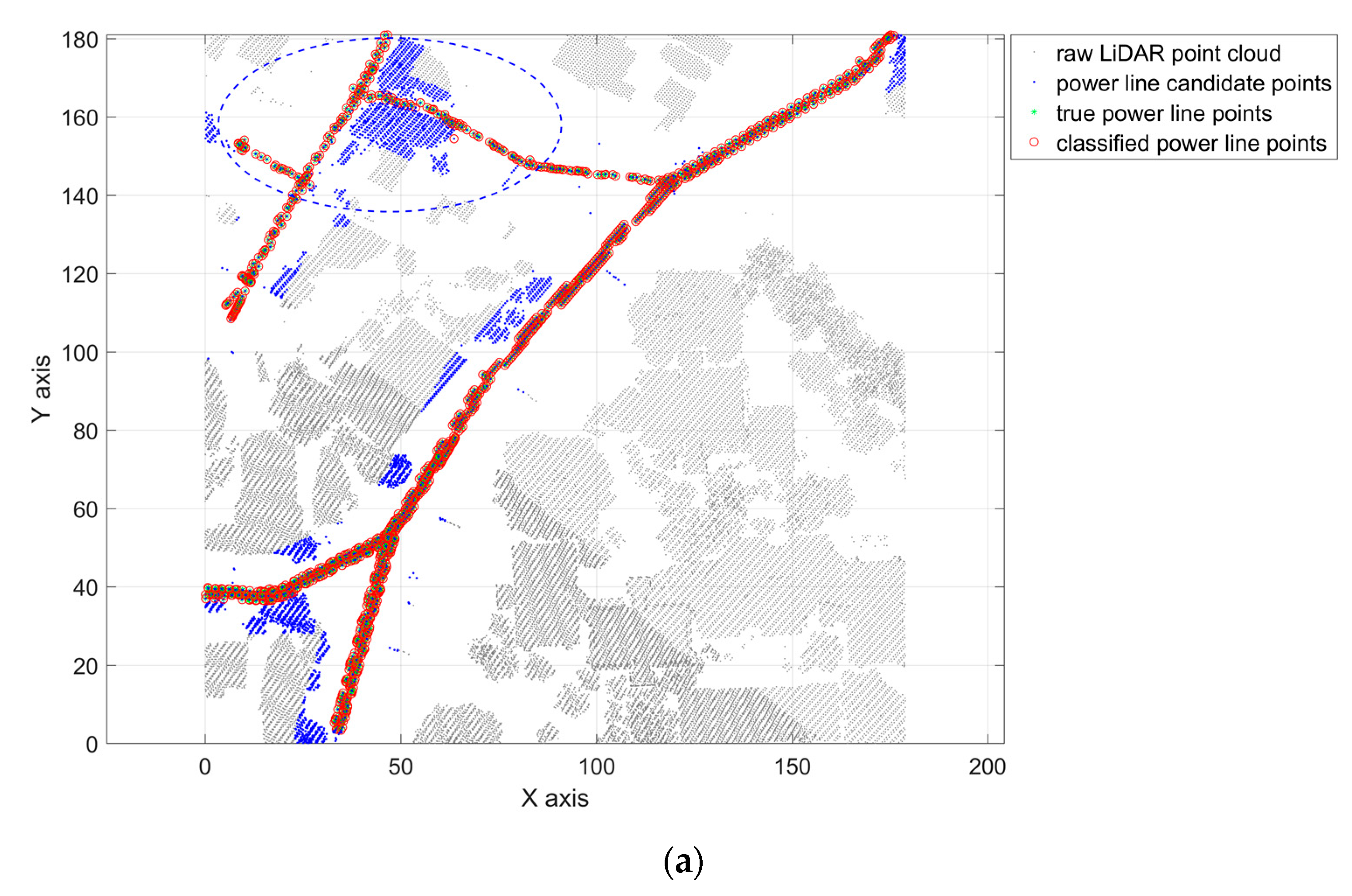
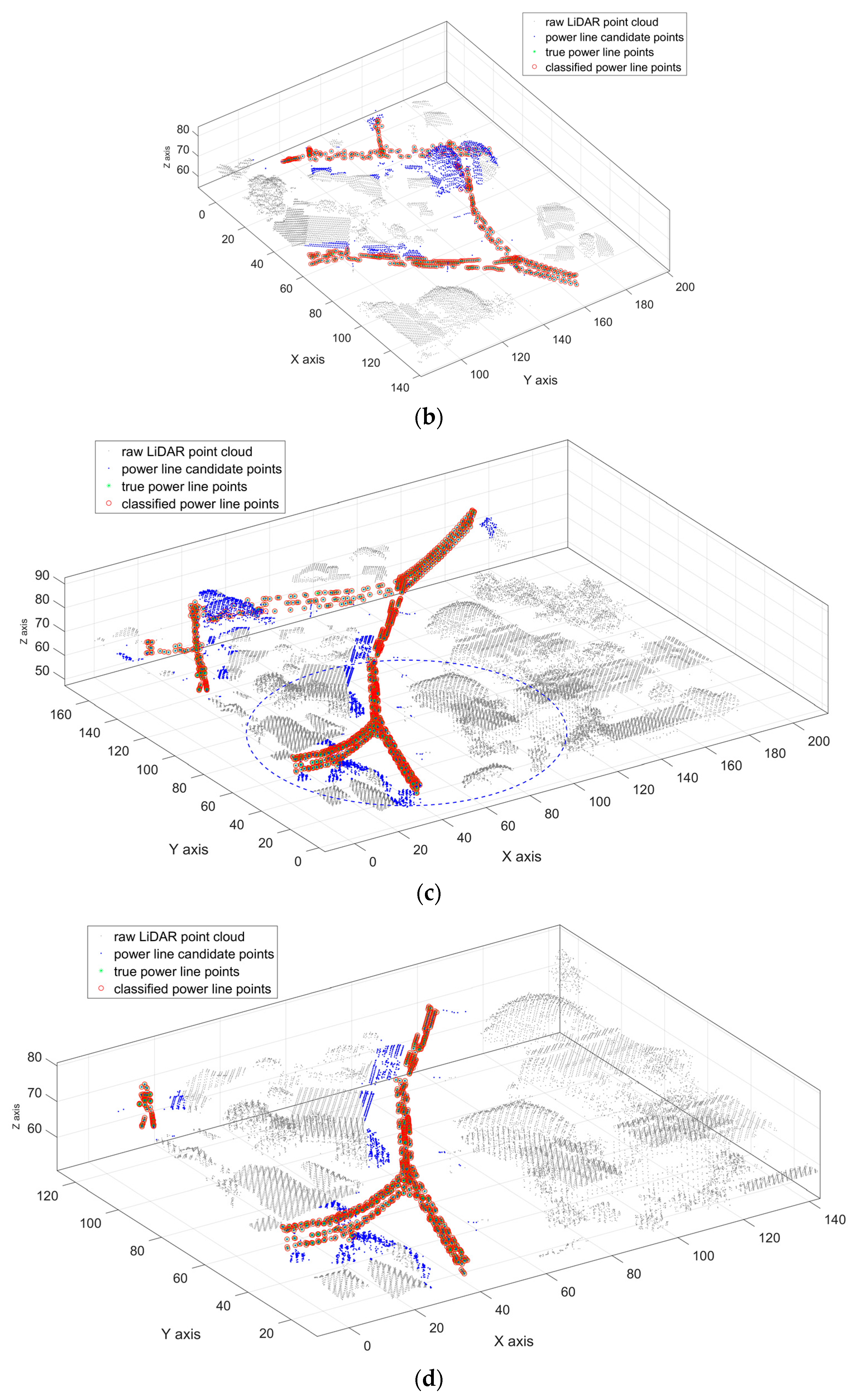
3. Results
3.1. Single-Scale and Multi-Scale Neighborhoods
3.2. Different Neighborhood Types
4. Discussion
4.1. Influence of Power Line Corridor Direction
4.2. Benefit of Power Line Neighborhood Selection
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ahmad, J.; Malik, A.S.; Xia, L.; Ashikin, N. Vegetation encroachment monitoring for transmission lines right-of-ways: A survey. Electr. Power Syst. Res. 2013, 95, 339–352. [Google Scholar] [CrossRef]
- Matikainen, L.; Lehtomäki, M.; Ahokas, E.; Hyyppä, J.; Karjalainen, M.; Jaakkola, A.; Kukko, A.; Heinonen, T. Remote sensing methods for power line corridor surveys. ISPRS J. Photogramm. Remote Sens. 2016, 119, 10–31. [Google Scholar] [CrossRef]
- Glennie, C.L.; Carter, W.E.; Shrestha, R.L.; Dietrich, W.E. Geodetic imaging with airborne LiDAR: The Earth’s surface revealed. Rep. Prog. Phys. Phys. Soc. 2013, 76, 086801. [Google Scholar] [CrossRef] [PubMed]
- McManamon, P.F. Review of ladar a historic, yet emerging, sensor technology with rich phenomenology. Opt. Eng. 2012, 51, 060901–060913. [Google Scholar] [CrossRef]
- Zhu, L.; Hyyppä, J. Fully-automated power line extraction from airborne laser scanning point clouds in forest areas. Remote Sens. 2014, 6, 11267–11282. [Google Scholar] [CrossRef]
- Guan, H.; Yu, Y.; Li, J.; Ji, Z.; Zhang, Q. Extraction of power-transmission lines from vehicle-borne lidar data. Int. J. Remote Sens. 2016, 37, 229–247. [Google Scholar] [CrossRef]
- Cheng, L.; Tong, L.; Wang, Y.; Li, M. Extraction of urban power lines from vehicle-borne lidar data. Remote Sens. 2014, 6, 3302–3320. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Z.; Hayward, R.; Walker, R.; Jin, H. Classification of airborne LiDAR intensity data using statistical analysis and hough transform with application to power line corridors. In Proceedings of the Digital Image Computing: Techniques & Applications Conference (DICTA 2009), Melbourne, Australia, 1–3 December 2009; pp. 462–467. [Google Scholar]
- Grigillo, D.; Ozvaldič, S.; Vrečko, A.; Fras, M.K. Extraction of power lines from airborne and terrestrial laser scanning data using the hough transform. Geodetski Vestnik 2015, 59, 246–261. [Google Scholar] [CrossRef]
- Sohn, G.; Jwa, Y.; Kim, H.B. Automatic powerline scene classification and reconstruction using airborne lidar data. In Proceedings of the XXII ISPRS Congress, ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 25 August–1 September 2012; Volume I-3, pp. 167–172. [Google Scholar]
- Yan, G.; Li, C.; Zhou, G.; Zhang, W.; Li, X. Automatic extraction of power lines from aerial images. IEEE Geosci. Remote Sens. Lett. 2007, 4, 387–391. [Google Scholar] [CrossRef]
- Kim, H.B.; Sohn, G. Point-based classification of power line corridor scene using random forests. Photogramm. Eng. Remote Sens. 2013, 79, 821–833. [Google Scholar] [CrossRef]
- Guo, B.; Li, Q.; Huang, X.; Wang, C. An improved method for power-line reconstruction from point cloud data. Remote Sens. 2016, 8, 36. [Google Scholar] [CrossRef]
- Weinmann, M.; Schmidt, A.; Mallet, C.; Hinz, S.; Rottensteiner, F.; Jutzi, B. Contextual classification of point cloud data by exploiting individual 3D neigbourhoods. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W4, 271–278. [Google Scholar] [CrossRef]
- Zhu, L.; Hyyppa, J. The use of airborne and mobile laser scanning for modeling railway environments in 3D. Remote Sens. 2014, 6, 3075–3100. [Google Scholar] [CrossRef]
- Clode, S.; Rottensteiner, F. Classification of trees and power lines from medium resolution airborne lasers canner data in urban environments. Clin. Ther. 2005, 34, 1145–1150. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus a paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1980, 24, 726–740. [Google Scholar]
- Melzer, T.; Briese, C. Extraction and modeling of power lines from ALS point clouds. In Proceedings of the 28th Workshop of the Austrian Association for Pattern Recognition, Hagenberg, Austria, 17–18 June 2004; pp. 47–54. [Google Scholar]
- Guo, B.; Huang, X.; Zhang, F.; Sohn, G. Classification of airborne laser scanning data using Joint Boost. ISPRS J. Photogramm. Remote Sens. 2015, 100, 71–83. [Google Scholar] [CrossRef]
- Jwa, Y.; Sohn, G. A piecewise catenary curve model growing for 3D power line reconstruction. Photogramm. Eng. Remote Sens. 2012, 78, 1227–1240. [Google Scholar] [CrossRef]
- Jwa, Y.; Sohn, G.; Kim, H.B. Automatic 3D powerline reconstruction using airborne LiDAR data. In Proceedings of the Laser Scanning 2009, Paris, France, 1–2 September 2009. [Google Scholar]
- Liang, J.; Zhang, J.; Deng, K.; Liu, Z. A new power-line extraction method based on airborne LiDAR point cloud data. In Proceedings of the International Symposium on Image and Data Fusion, Tengchong, China, 9–11 August 2011; pp. 1–4. [Google Scholar]
- Ritter, M.; Benger, W. Reconstructing power cables from LiDAR data using eigenvector streamlines of the point distribution tensor field. In Proceedings of the WSCG2012, 20th International Conference in Central Europe on Computer Graphics, Visualization and Computer Vision, Plzen, Czech Republic, 25–28 June 2012. [Google Scholar]
- Zhang, J.; Lin, X.; Ning, X. SVM-based classification of segmented airborne LiDAR point clouds in urban areas. Remote Sens. 2013, 5, 3749–3775. [Google Scholar] [CrossRef]
- Ramiya, A.M.; Nidamanuri, R.R.; Krishnan, R. Object-oriented semantic labelling of spectral-spatial LiDAR point cloud for urban land cover classification and buildings detection. Geocarto Int. 2015, 31, 121–139. [Google Scholar] [CrossRef]
- Blomley, R.; Jutzi, B.; Weinmann, M. Classification of airborne laser scanning data using geometric multi-scale features and different neighbourhood types. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-3, 169–176. [Google Scholar] [CrossRef]
- Niemeyer, J.; Rottensteiner, F.; Soergel, U. Contextual classification of LiDAR data and building object detection in urban areas. ISPRS J. Photogramm. Remote Sens. 2014, 87, 152–165. [Google Scholar] [CrossRef]
- Stal, C.; Briese, C.; De Maeyer, P.; Dorninger, P.; Nuttens, T.; Pfeifer, N.; De Wulf, A. Classification of airborne laser scanning point clouds based on binomial logistic regression analysis. Int. J. Remote Sens. 2014, 35, 3219–3236. [Google Scholar] [CrossRef]
- Zhou, G.; Zhou, X. Seamless fusion of LiDAR and aerial imagery for building extraction. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7393–7407. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, L.; Tong, X.; Mathiopoulos, P.T.; Guo, B.; Huang, X.; Wang, Z.; Wang, Y. A multilevel point-cluster-based discriminative feature for ALS point cloud classification. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3309–3321. [Google Scholar] [CrossRef]
- Weinmann, M.; Jutzi, B.; Hinz, S.; Mallet, C. Semantic point cloud interpretation based on optimal neighborhoods, relevant features and efficient classifiers. ISPRS J. Photogramm. Remote Sens. 2015, 105, 286–304. [Google Scholar] [CrossRef]
- Weinmann, M.; Urban, S.; Hinz, S.; Jutzi, B.; Mallet, C. Distinctive 2D and 3D features for automated large-scale scene analysis in urban areas. Comput. Graph. 2015, 49, 47–57. [Google Scholar] [CrossRef]
- Yang, B.; Huang, R.; Li, J.; Tian, M.; Dai, W.; Zhong, R. Automated reconstruction of building LoDs from airborne LiDAR point clouds using an improved morphological scale space. Remote Sens. 2016, 9, 14. [Google Scholar] [CrossRef]
- Chen, Q. Airborne LiDAR data processing and information extraction. Photogramm. Eng. Remote Sens. 2007, 73, 109–112. [Google Scholar]
- Li, Z.; Hodgson, M.E.; Li, W. A general-purpose framework for parallel processing of large-scale LiDAR data. Int. J. Digit. Earth 2017, 1–22. [Google Scholar] [CrossRef]
- Serifoglu Yilmaz, C.; Gungor, O. Comparison of the performances of ground filtering algorithms and DTM generation from a UAV-based point cloud. Geocarto Int. 2016, 1–16. [Google Scholar] [CrossRef]
- Korzeniowska, K.; Pfeifer, N.; Mandlburger, G.; Lugmayr, A. Experimental evaluation of ALS point cloud ground extraction tools over different terrain slope and land-cover types. Int. J. Remote Sens. 2014, 35, 4673–4697. [Google Scholar] [CrossRef]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef]
- Chen, Q.; Gong, P.; Baldocchi, D.; Xie, G. Filtering airborne laser scanning data with morphological methods. Photogramm. Eng. Remote Sens. 2007, 72, 175–185. [Google Scholar] [CrossRef]
- Chen, Q. Improvement of the Edge-based Morphological (EM) method for LiDAR data filtering. Int. J. Remote Sens. 2009, 30, 1069–1074. [Google Scholar] [CrossRef]
- Xu, K.; Zhang, X.; Chen, Z.; Wu, W.; Li, T. Risk assessment for wildfire occurrence in high-voltage power line corridors by using remote-sensing techniques: A case study in Hubei Province, China. Int. J. Remote Sens. 2016, 37, 4818–4837. [Google Scholar] [CrossRef]
- Hackel, T.; Wegner, J.D.; Schindler, K. Fast semantic segmentation of 3D point clouds with strongly varying density. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-3, 177–184. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | UL Dataset | LP Dataset |
|---|---|---|
| Ground | 48,070 | 136,891 |
| Building | 24,348 | 48,574 |
| Vegetation | 19,532 | 73,523 |
| Power line | 1519 | 6858 |
| Others (billboard, etc.) | 4475 | 2516 |
| Total | 97,944 | 268,362 |
| Feature Class | Formal Definition | Computing Method |
|---|---|---|
| Geometric features | Normalized eigenvalues | |
| Linearity | ||
| Planarity | ||
| Scattering | ||
| Distributional features | Omnivariance | |
| Sum | ||
| Changing of curvature | ||
| Radius of local neighborhood | ||
| Density of point set | ||
| Delta of point set in Z axis |
| Scale | UL Dataset | LP Dataset | ||||||
|---|---|---|---|---|---|---|---|---|
| 74.12 | 41.74 | 36.23 | 126 | 79.17 | 58.59 | 50.76 | 1029 | |
| 82.28 | 68.80 | 59.92 | 82 | 93.59 | 63.88 | 61.20 | 935 | |
| 95.19 | 85.91 | 82.33 | 48 | 96.55 | 75.85 | 73.85 | 921 | |
| 95.98 | 91.11 | 87.76 | 44 | 91.99 | 89.59 | 83.11 | 882 | |
| 94.38 | 91.84 | 87.08 | 52 | 93.06 | 91.08 | 85.28 | 942 | |
| 94.65 | 89.73 | 85.40 | 64 | 95.92 | 82.52 | 79.72 | 886 | |
| 97.89 | 94.73 | 92.84 | 131 | 97.98 | 96.85 | 94.95 | 1220 | |
| Type | UL Dataset | LP Dataset | ||||||
|---|---|---|---|---|---|---|---|---|
| 97.89 | 94.73 | 92.84 | 131 | 97.98 | 96.85 | 94.95 | 1220 | |
| 97.47 | 96.25 | 93.89 | 152 | 98.19 | 97.42 | 95.70 | 767 | |
| 86.88 | 58.85 | 54.05 | 116 | 87.88 | 79.01 | 71.31 | 1513 | |
| 97.44 | 97.83 | 95.38 | 18 | 98.83 | 98.25 | 97.12 | 98 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Chen, Q.; Liu, L.; Zheng, D.; Li, C.; Li, K. Supervised Classification of Power Lines from Airborne LiDAR Data in Urban Areas. Remote Sens. 2017, 9, 771. https://doi.org/10.3390/rs9080771
Wang Y, Chen Q, Liu L, Zheng D, Li C, Li K. Supervised Classification of Power Lines from Airborne LiDAR Data in Urban Areas. Remote Sensing. 2017; 9(8):771. https://doi.org/10.3390/rs9080771
Chicago/Turabian StyleWang, Yanjun, Qi Chen, Lin Liu, Dunyong Zheng, Chaokui Li, and Kai Li. 2017. "Supervised Classification of Power Lines from Airborne LiDAR Data in Urban Areas" Remote Sensing 9, no. 8: 771. https://doi.org/10.3390/rs9080771
APA StyleWang, Y., Chen, Q., Liu, L., Zheng, D., Li, C., & Li, K. (2017). Supervised Classification of Power Lines from Airborne LiDAR Data in Urban Areas. Remote Sensing, 9(8), 771. https://doi.org/10.3390/rs9080771