
Improved Model for Depth Bias Correction in Airborne LiDAR Bathymetry Systems


Abstract
:
1. Introduction
2. Building the Depth Bias Model
2.1. Influencing Factors and Depth Bias Model
2.2. Development of the Depth Bias Model
- (1)
- Seabed elevations derived from ALB and sonar at the same locations.
- (2)
- Ocean hydrological parameters of the ALB survey water (i.e., SSC C) and ALB measurement parameters (i.e., beam scanning angle φ and sensor height H).
2.3. Variable Selection for the Depth Bias Model
3. Experiment and Analysis
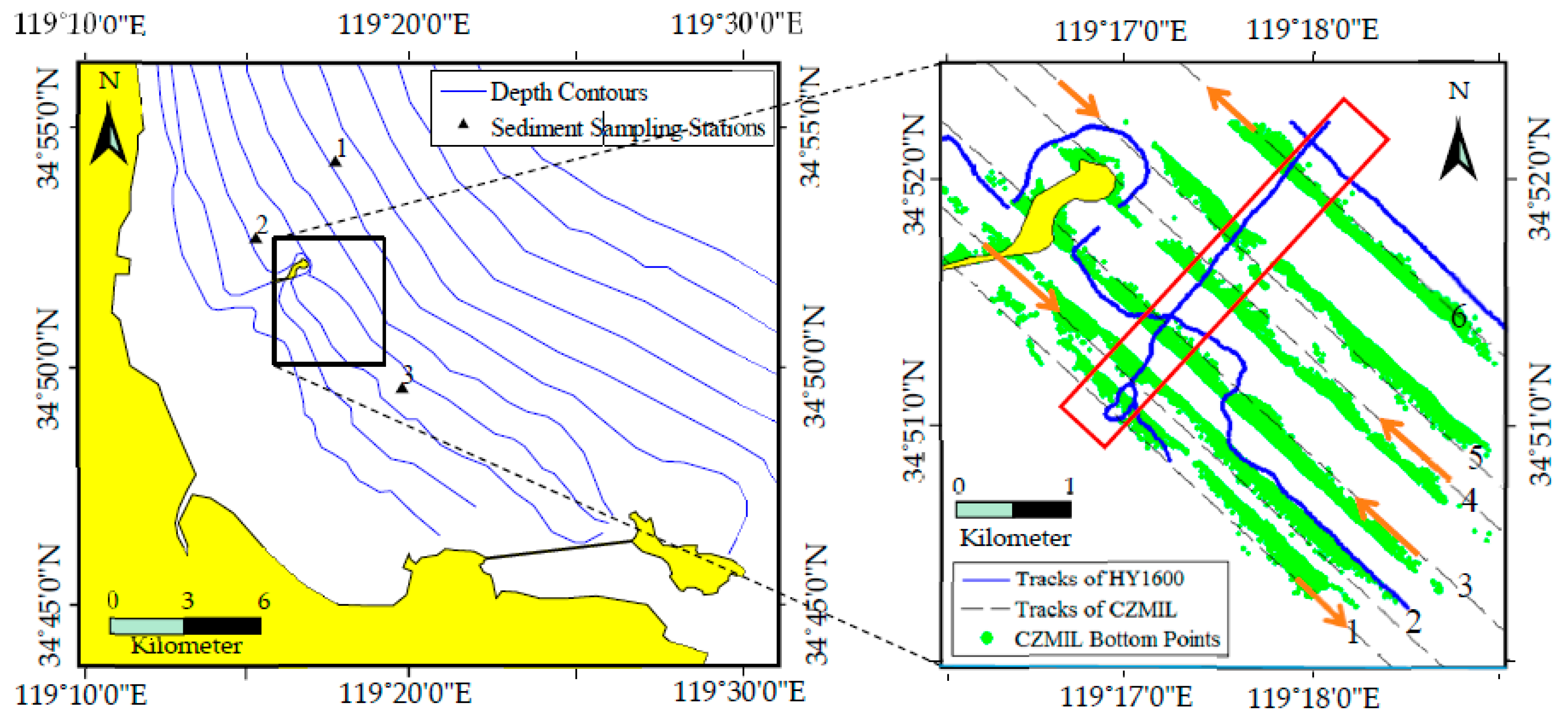
3.1. Data Acquisition
3.2. Model Construction
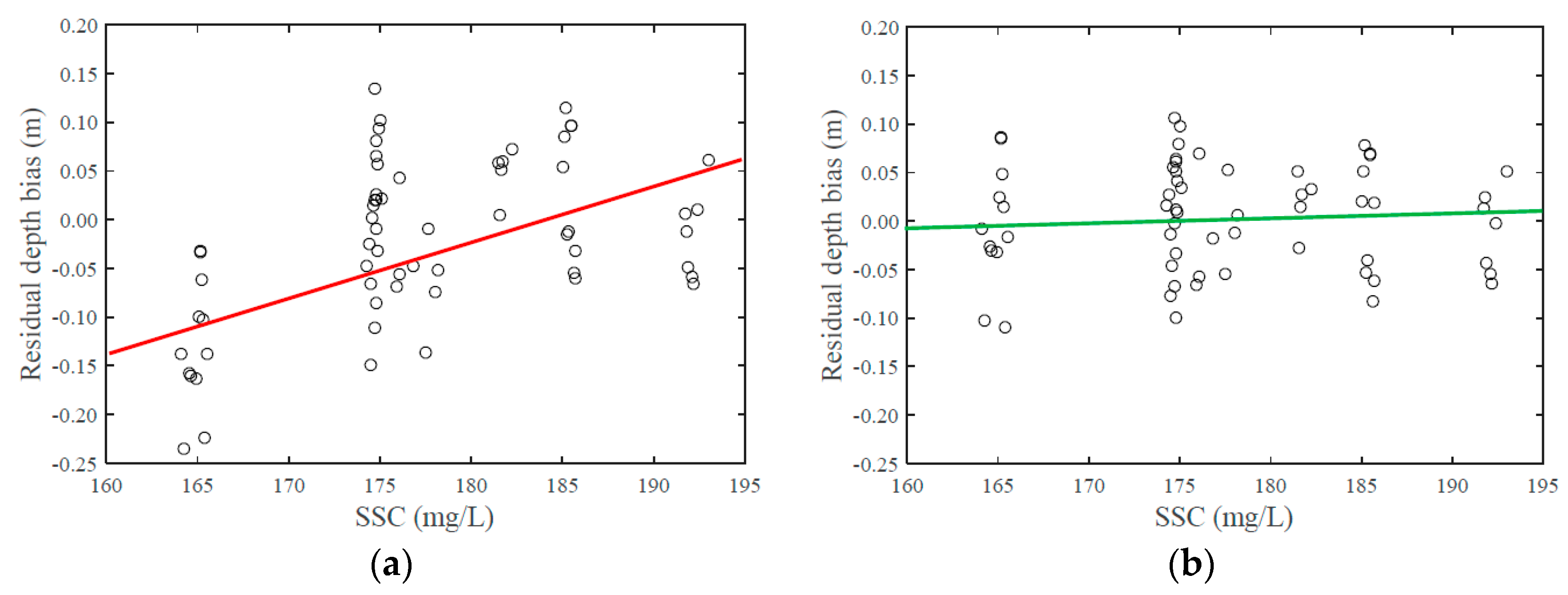
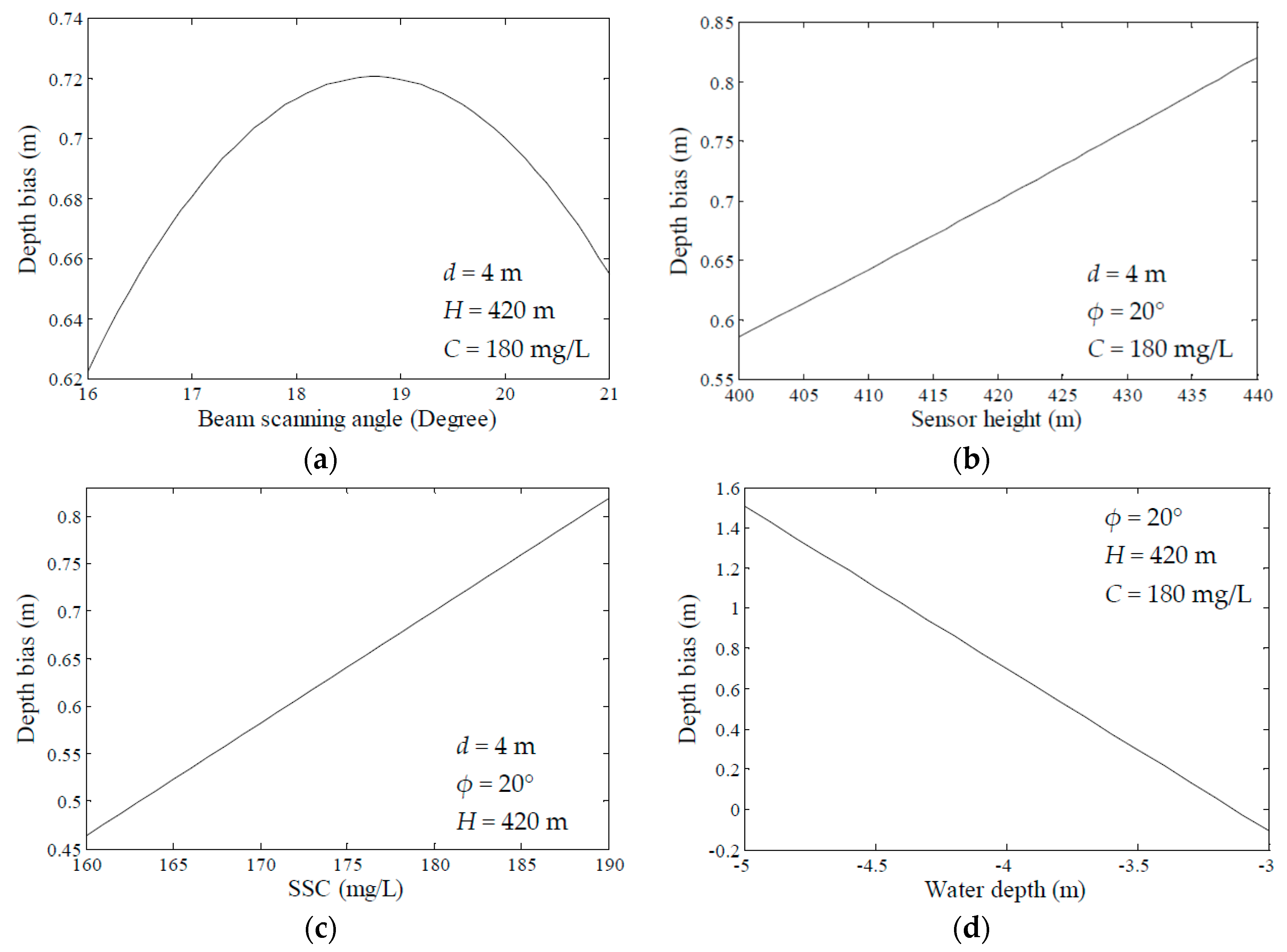
3.3. Influence Analysis
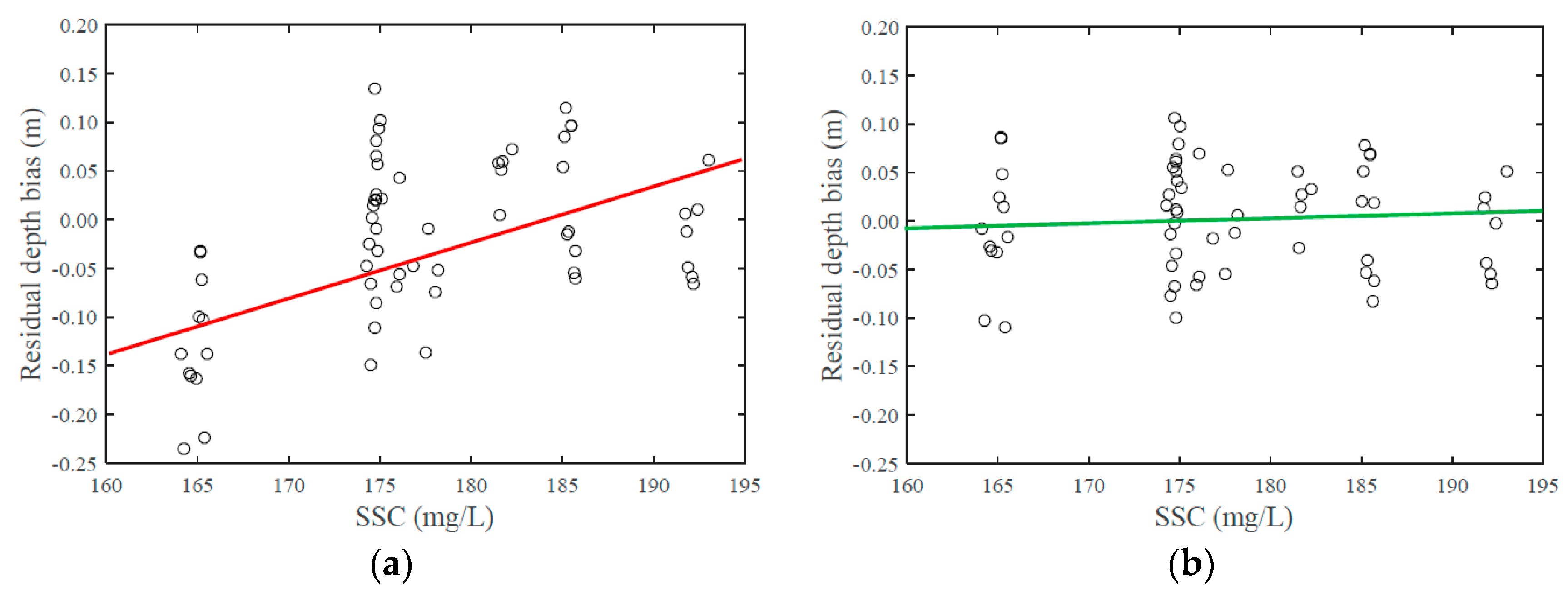
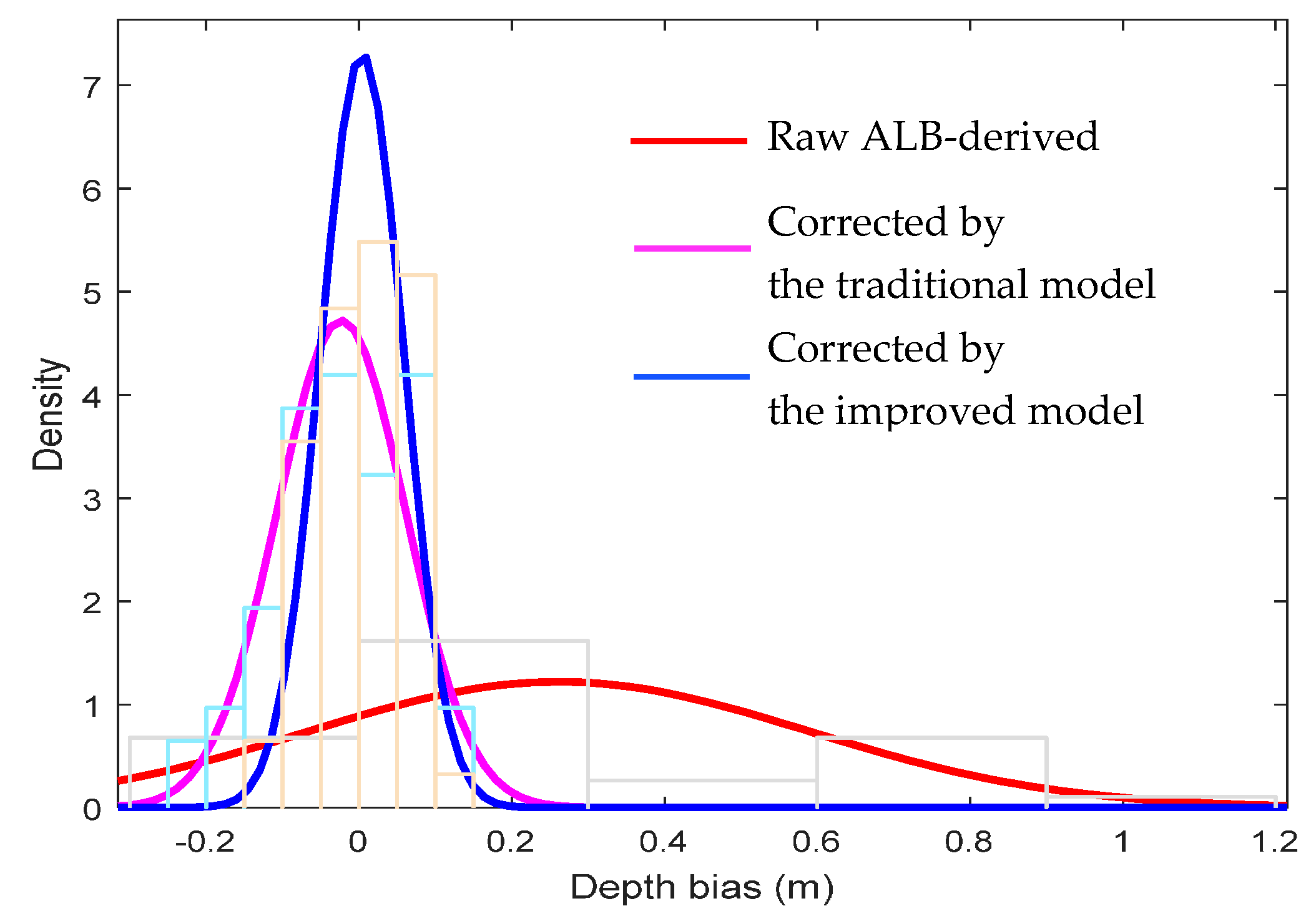
3.4. Accuracy Analysis
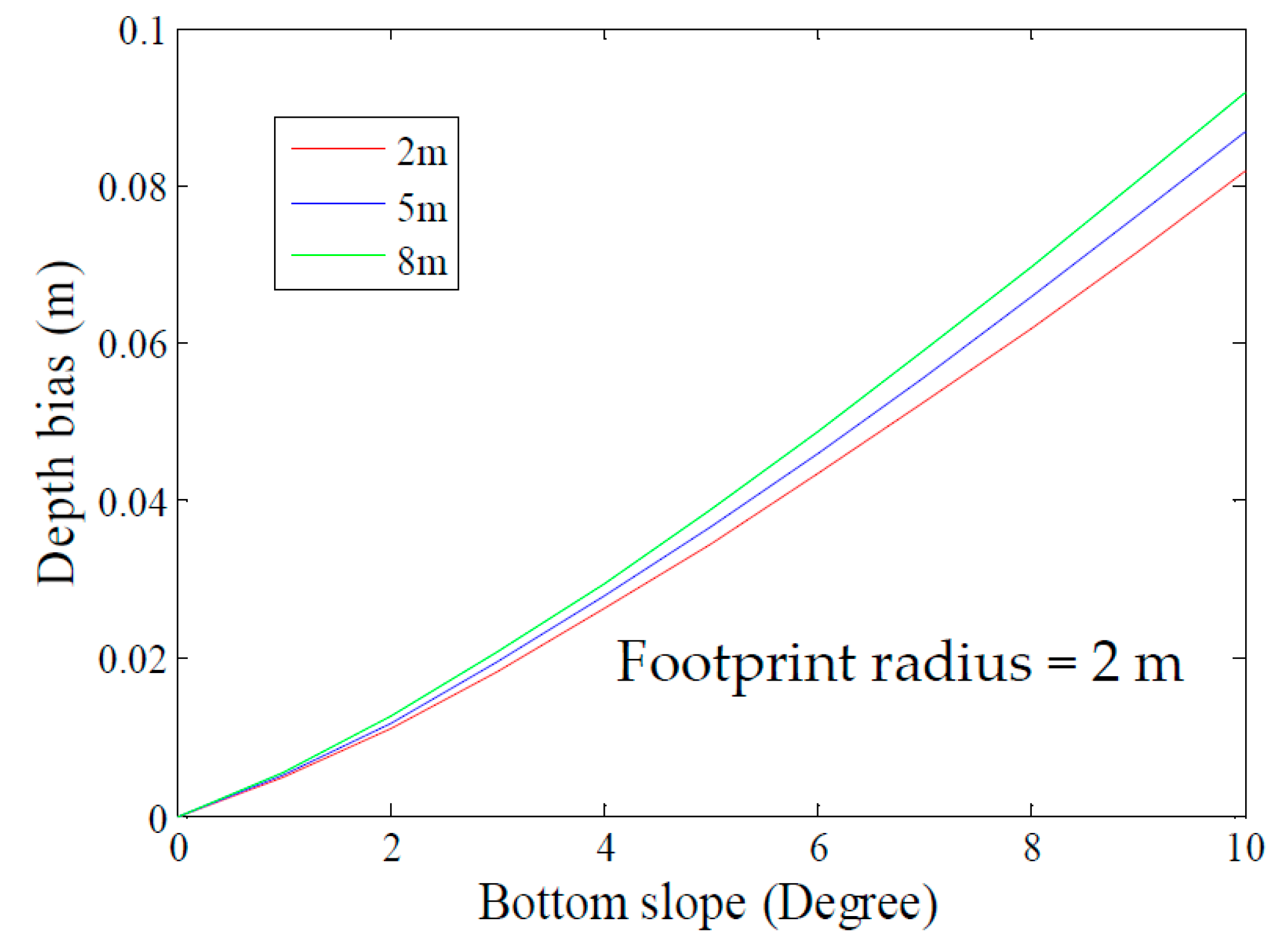
4. Discussion
5. Conclusions and Suggestions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Guenther, G.C.; Cunningham, A.G.; Laroque, P.E.; Reid, D.J. Meeting the accuracy challenge in airborne LiDAR bathymetry. In Proceedings of the 20th EARSeL Symposium: Workshop on LiDAR Remote Sensing of Land and Sea, Dresden, Germany, 16–17 June 2000. [Google Scholar]
- Guenther, G.C. Airborne Laser Hydrography: System Design and Performance Factors. Available online: http://shoals.sam.usace.army.mil/downloads/Publications/AirborneLidarHydrography.pdf (accessed on 25 February 2017).
- Guenther, G.C. Airborne LiDAR Bathymetry. Available online: https://pdfs.semanticscholar.org/a3a3/3880cd50e88b65f49c7c86e84526eaa3398d.pdf (accessed on 25 February 2017).
- Irish, J.L.; White, T.E. Coastal engineering applications of high-resolution LiDAR bathymetry. Coast. Eng. 1998, 35, 47–71. [Google Scholar] [CrossRef]
- Wang, C.; Li, Q.; Liu, Y.; Wu, G.; Liu, P.; Ding, X. A comparison of waveform processing algorithms for single-wavelength LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2015, 101, 22–35. [Google Scholar] [CrossRef]
- Quadros, N.D.; Collier, P.A.; Fraser, C.S. Integration of bathymetric and topographic LiDAR: A preliminary investigation. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2008, 36, 1299–1304. [Google Scholar]
- Wozencraft, J.; Millar, D. Airborne LiDAR and integrated technologies for coastal mapping and nautical charting. Mar. Technol. Soc. J. 2005, 39, 27–35. [Google Scholar] [CrossRef]
- Pittman, S.J.; Costa, B.M.; Battista, T.A. Using LiDAR bathymetry and boosted regression trees to predict the diversity and abundance of fish and corals. J. Coast. Res. 2009. [Google Scholar] [CrossRef]
- Cappucci, S.; Valentini, E.; Monte, M.D.; Paci, M.; Filipponi, F.; Taramelli, A. Detection of natural and anthropic features on small islands. J. Coast. Res. 2017, 77, 73–87. [Google Scholar] [CrossRef]
- Taramelli, A.; Valentini, E.; Innocenti, C.; Cappucci, S. FHYL: Field spectral libraries, airborne hyperspectral images and topographic and bathymetric LiDAR data for complex coastal mapping. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013. [Google Scholar]
- Ramnath, V.; Feygels, V.; Kopilevich, Y.; Park, J.Y.; Tuell, G. Predicted bathymetric LiDAR performance of coastal zone mapping and imaging LiDAR (CZMIL). Proc. SPIE 2010, 7695, 769511. [Google Scholar]
- Penny, M.; Abbot, R.; Phillips, D.; Billard, B.; Rees, D.; Faulkner, D. Airborne laser hydrography in Australia. Appl. Opt. 1986, 25, 2046–2058. [Google Scholar] [CrossRef] [PubMed]
- Guenther, G.C.; Thomas, R.W. Error Analysis of Pulse Location Estimates for Simulated Bathymetric LiDAR Returns; NOAA Technical Report; University of California Libraries: Berkeley, CA, USA, 1981. [Google Scholar]
- Bouhdaoui, A.; Bailly, J.S.; Baghdadi, N.; Abady, L. Modeling the water bottom geometry effect on peak time shifting in LiDAR bathymetric waveforms. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1285–1289. [Google Scholar] [CrossRef]
- Walker, R.E.; McLean, J.W. LiDAR equations for turbid media with pulse stretching. Appl. Opt. 1999, 38, 2384–2397. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.K.; Philpot, W.D. Using airborne bathymetric LiDAR to detect bottom type variation in shallow waters. Remote Sens. Environ. 2007, 106, 123–135. [Google Scholar] [CrossRef]
- Thurman, H.V. Essentials of Oceanography; Merrill Publishing Company: Columbus, OH, USA, 1990. [Google Scholar]
- Billard, B.; Abbot, R.H.; Penny, M.F. Modeling depth bias in an airborne laser hydrographic system. Appl. Opt. 1986, 25, 2089–2098. [Google Scholar] [CrossRef] [PubMed]
- Wright, C.W.; Kranenburg, C.J.; Troche, R.J.; Mitchell, R.W.; Nagle, D.B. Depth Calibration of the Experimental Advanced Airborne Research LiDAR, EAARL-B.U.S.; Geological Survey Open-File Report 2016–1048; U.S. Geological Survey: Reston, VA, USA, 2016.
- Hilldale, R.C.; Raff, D. Assessing the ability of airborne LiDAR to map river bathymetry. Earth Surf. Process. Landf. 2008, 33, 773. [Google Scholar] [CrossRef]
- Skinner, K.D. Evaluation of LiDAR-Acquired Bathymetric and Topographic Data Accuracy in Various Hydrogeomorphic Settings in the Deadwood and South Fork Boise Rivers, West-Central Idaho, 2007; U.S. Geological Survey Scientific Investigations Report 2011-5051; U.S. Geological Survey: Reston, VA, USA, 2011.
- Abdallah, H.; Baghdadi, N.; Bailly, J.S.; Pastol, Y.; Fabre, F. Wa-LiD: A new LiDAR simulator for waters. IEEE Geosci. Remote Sens. Lett. 2012, 9, 744–748. [Google Scholar] [CrossRef]
- Gippel, C.J. Potential of turbidity monitoring for measuring the transport of suspended solids in streams. Hydrol. Process. 1995, 9, 83–97. [Google Scholar] [CrossRef]
- Lewis, J. Turbidity-controlled suspended sediment sampling for runoff-event load estimation. Water Resour. Res. 1996, 32, 2299–2310. [Google Scholar] [CrossRef]
- Grayson, R.; Finlayson, B.L.; Gippel, C.; Hart, B. The potential of field turbidity measurements for the computation of total phosphorus and suspended solids loads. J. Environ. Manag. 1996, 47, 257–267. [Google Scholar] [CrossRef]
- Smith, D.; Davies-Colley, R. If visual clarity is the issue then why not measure it. In Proceedings of the National Monitoring Conference, Madison, MA, USA, 19–23 May 2002. [Google Scholar]
- Mitchell, S.; Burgess, H.; Pope, D. Observations of fine-sediment transport in a semi-enclosed sheltered natural harbour (Pagham Harbour, UK). J. Coast. Res. 2004, 41, 141–147. [Google Scholar]
- Pavanelli, D.; Bigi, A. Indirect methods to estimate suspended sediment concentration: Reliability and relationship of turbidity and settleable solids. Biosyst. Eng. 2005, 90, 75–83. [Google Scholar] [CrossRef]
- Chanson, H.; Takeuchi, M.; Trevethan, M. Using turbidity and acoustic backscatter intensity as surrogate measures of suspended sediment concentration in a small subtropical estuary. J. Environ. Manag. 2008, 88, 1406–1416. [Google Scholar] [CrossRef] [PubMed]
- Carr, D.A. A Study of the Target Detection Capabilities of an Airborne LiDAR Bathymetry System. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2013. [Google Scholar]
- Stepwise Regression. Available online: http://ncss.wpengine.netdna-cdn.com/wp-content/themes/ncss/pdf/Procedures/NCSS/Stepwise_Regression.pdf (accessed on 18 January 2017).
- Bartier, P.M.; Keller, C.P. Multivariate interpolation to incorporate thematic surface data using inverse distance weighting (IDW). Comput. Geosci. 1996, 22, 795–799. [Google Scholar] [CrossRef]
- Lawson, S.; Wiberg, P.; McGlathery, K.; Fugate, D. Wind-driven sediment suspension controls light availability in a shallow coastal lagoon. Estuar. Coasts 2007, 30, 102–112. [Google Scholar] [CrossRef]
- Wu, D.; Hu, G. Interpolation calculation methods for suspended sediment concentration in the yangtze estuary. In Proceedings of the IEEE International Conference on Intelligent Computing and Intelligent Systems, Shanghai, China, 20–22 November 2009. [Google Scholar]
- LaRocque, P.E.; Banic, J.R.; Cunningham, A.G. Design description and field testing of the SHOALS-1000T airborne bathymeter. Proc. SPIE 2004, 5412, 162–184. [Google Scholar]
- Alne, I.S. Topo-Bathymetric LiDAR for Hydraulic Modeling-Evaluation of LiDAR Data from Two Rivers. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2016. [Google Scholar]
- Quadros, N.D. Unlocking the Characteristics of Bathymetric LiDAR Sensors. Available online: http://www.lidarmag.com/content/view/10159/199/ (accessed on 18 January 2017).
- Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Shallow Water Measurements Using a Single Green Laser Corrected by Building a Near Water Surface Penetration Model. Remote Sens. 2017, 9, 426. [Google Scholar] [CrossRef]
- Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Analyzing near water surface penetration in laser bathymetry—A case study at the River Pielach. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Antalya, Turkey, 11–13 November 2013. [Google Scholar]
- Wong, H.; Antoniou, A. One-dimensional signal processing techniques for airborne laser bathymetry. IEEE Trans. Geosci. Remote Sens. 1994, 32, 35–46. [Google Scholar] [CrossRef]
- Uriel, E. Hypothesis Testing in the Multiple Regression Model. Available online: http://ctu.edu.vn/~dvxe/econometrics/uriel_chapter4.pdf (accessed on 18 January 2017).
- Keith, T.Z. Multiple Regression and Beyond; Pearson Education: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Miller, J. Statistical significance testing—A panacea for software technology experiments? J. Syst. Softw. 2004, 73, 183–192. [Google Scholar] [CrossRef]
- Hamilton, L.C. Regression with Graphics: A Second Course in Applied Statistics; Brooks/Cole Pub. Co.: Pacific Grove, CA, USA, 1992. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Specifications |
|---|---|
| Operating altitude | 400 m (nominal) |
| Aircraft speed | 140 kts (nominal) |
| Pulse repetition frequency | 10 kHz |
| Circular scan rate | 27 Hz |
| Laser wavelengths | IR: 1064 nm; green: 532 nm |
| Maximum depth single pulse | 4.2/Kd (bottom reflectivity > 15%) |
| Minimum depth | <0.15 m |
| Bathymetric accuracy | (0.32 + (0.013d)2)½ m, 2σ |
| Horizontal accuracy | (3.5 + 0.05d) m, 2σ |
| Scan angle | 20° (fixed off-nadir, circular pattern) |
| Swath width | 294 m nominal |
| Sampling Station | SSC (mg/L) |
|---|---|
| 1 | 315 |
| 2 | 122 |
| 3 | 134 |
| Δd (m) | d (m) | φ (°) | H (m) | C (mg/L) | |
|---|---|---|---|---|---|
| Max. | 1.22 | −3.1 | 20.8 | 440 | 193 |
| Min. | −0.16 | −4.6 | 16.3 | 394 | 164 |
| Mean | 0.16 | −3.4 | 19.1 | 420 | 177 |
| Std. | 0.29 | 0.3 | 1 | 11 | 5.8 |
| Item | Coefficient (Units) | Initial Model | Improved Model | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Value | SE | t | p | Value | SE | t | p | ||
| d | β1 (1) | −2.66 × 10−1 | 2.38 | −1.11 × 10−1 | 0.9114 | 1.17 | 4.46 × 10−1 | 2.62 | 0.0093 |
| φd | β2 (deg−1) | −8.99 × 10−2 | 4.94 × 10−2 | −1.82 | 0.0699 | −1.22 × 10−1 | 4.50 × 10−2 | −2.70 | 0.0073 |
| φ2d | β3 (deg−2) | 2.35 × 10−3 | 1.32 × 10−3 | 1.78 | 0.0766 | 3.24 × 10−3 | 1.21 × 10−3 | 2.68 | 0.0078 |
| Hd | β4 (m−1) | 2.31 × 10−2 | 1.30 × 10−2 | 1.79 | 0.0752 | ||||
| H2d | β5 (m−2) | −2.93 × 10−5 | 1.53 × 10−5 | −1.91 | 0.0577 | −1.75 × 10−6 | 3.34 × 10−7 | −5.23 | 0.0000 |
| Cd | β6 (mg−1·L) | −4.62 × 10−2 | 1.74 × 10−2 | −2.65 | 0.0084 | −2.95 × 10−3 | 4.15 × 10−4 | −7.12 | 0.0000 |
| C2d | β7 (mg−2·L2) | 1.24 × 10−4 | 4.98 × 10−5 | 2.49 | 0.0134 | ||||
| Constant | b (m) | −2.79 | 1.39 × 10−1 | −20.09 | 0.0000 | −2.53 | 8.93 × 10−2 | −28.37 | 0.0000 |
| Item | Coefficients | Value | SE | t | p |
|---|---|---|---|---|---|
| d | β | −8.3 × 10−1 | 1.8 × 10−2 | −44.7 | 0.0000 |
| Constant | b | −2.6 | 6.3 × 10−2 | −42.0 | 0.0000 |
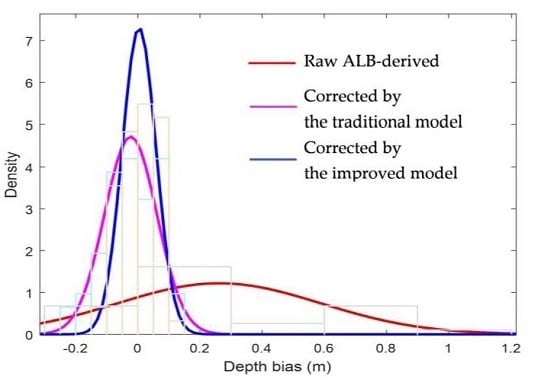
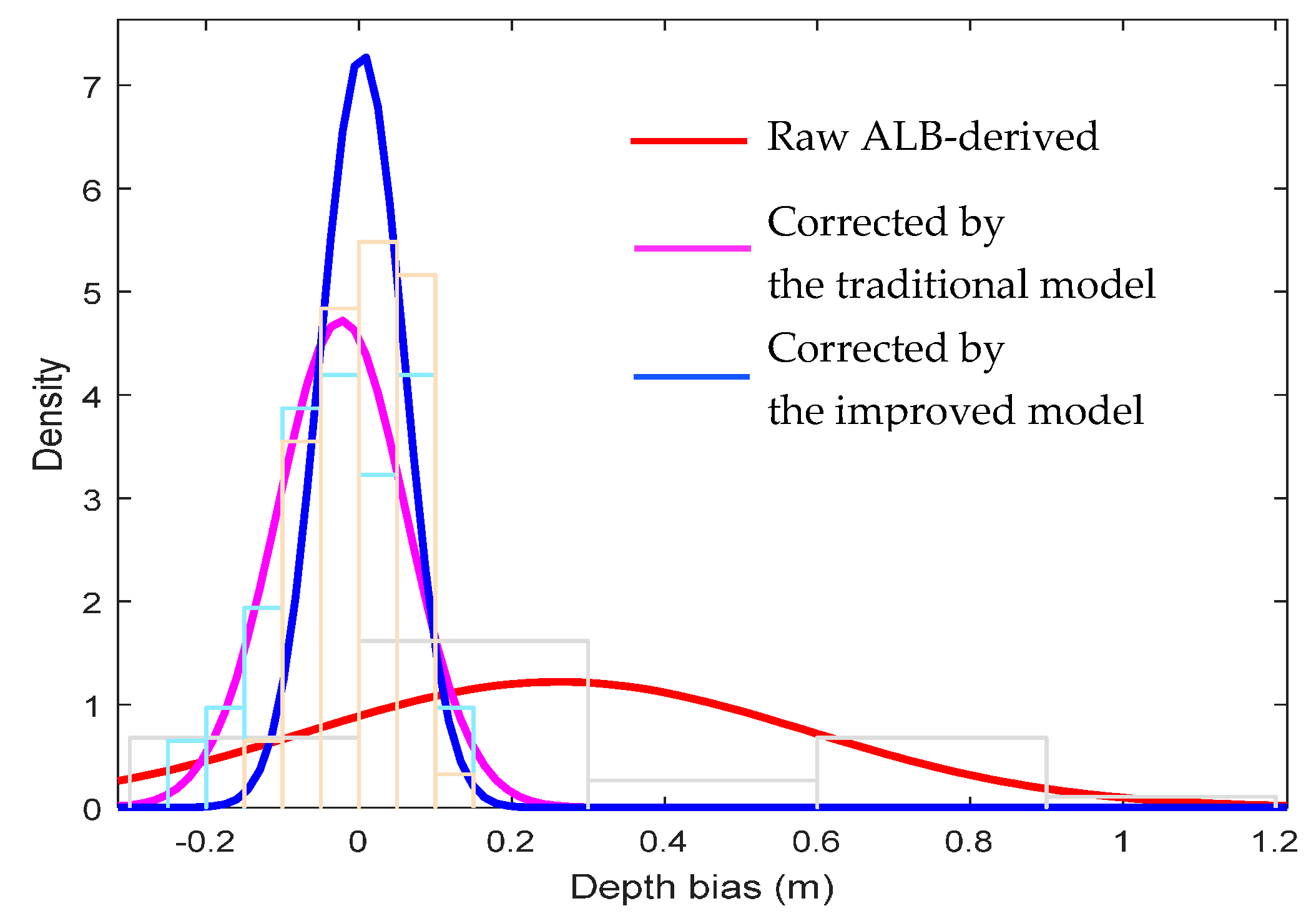
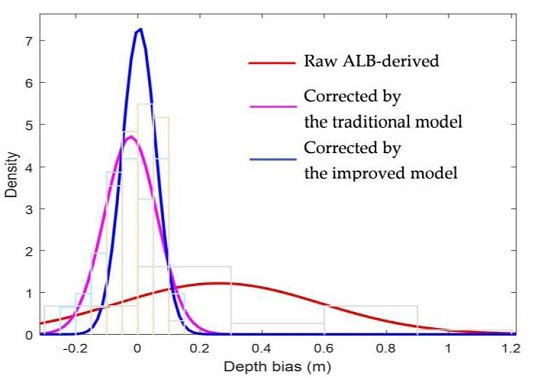
| Depth Bias (m) | Max. | Min. | Mean | Std. | Worst Case | Meets IHO Standard |
|---|---|---|---|---|---|---|
| Raw ALB-derived | 1.173 | −0.167 | 0.262 | 0.327 | 0.916 | × |
| Corrected by the traditional model | 0.134 | −0.235 | −0.023 | 0.086 | 0.195 | √ |
| Corrected by the improved model | 0.106 | −0.109 | 0.004 | 0.055 | 0.114 | √ |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Improved Model for Depth Bias Correction in Airborne LiDAR Bathymetry Systems. Remote Sens. 2017, 9, 710. https://doi.org/10.3390/rs9070710
Zhao J, Zhao X, Zhang H, Zhou F. Improved Model for Depth Bias Correction in Airborne LiDAR Bathymetry Systems. Remote Sensing. 2017; 9(7):710. https://doi.org/10.3390/rs9070710
Chicago/Turabian StyleZhao, Jianhu, Xinglei Zhao, Hongmei Zhang, and Fengnian Zhou. 2017. "Improved Model for Depth Bias Correction in Airborne LiDAR Bathymetry Systems" Remote Sensing 9, no. 7: 710. https://doi.org/10.3390/rs9070710
APA StyleZhao, J., Zhao, X., Zhang, H., & Zhou, F. (2017). Improved Model for Depth Bias Correction in Airborne LiDAR Bathymetry Systems. Remote Sensing, 9(7), 710. https://doi.org/10.3390/rs9070710