Monitoring the Arctic Seas: How Satellite Altimetry Can Be Used to Detect Open Water in Sea-Ice Regions


Abstract
:
1. Introduction
2. Study Area and Data Sets
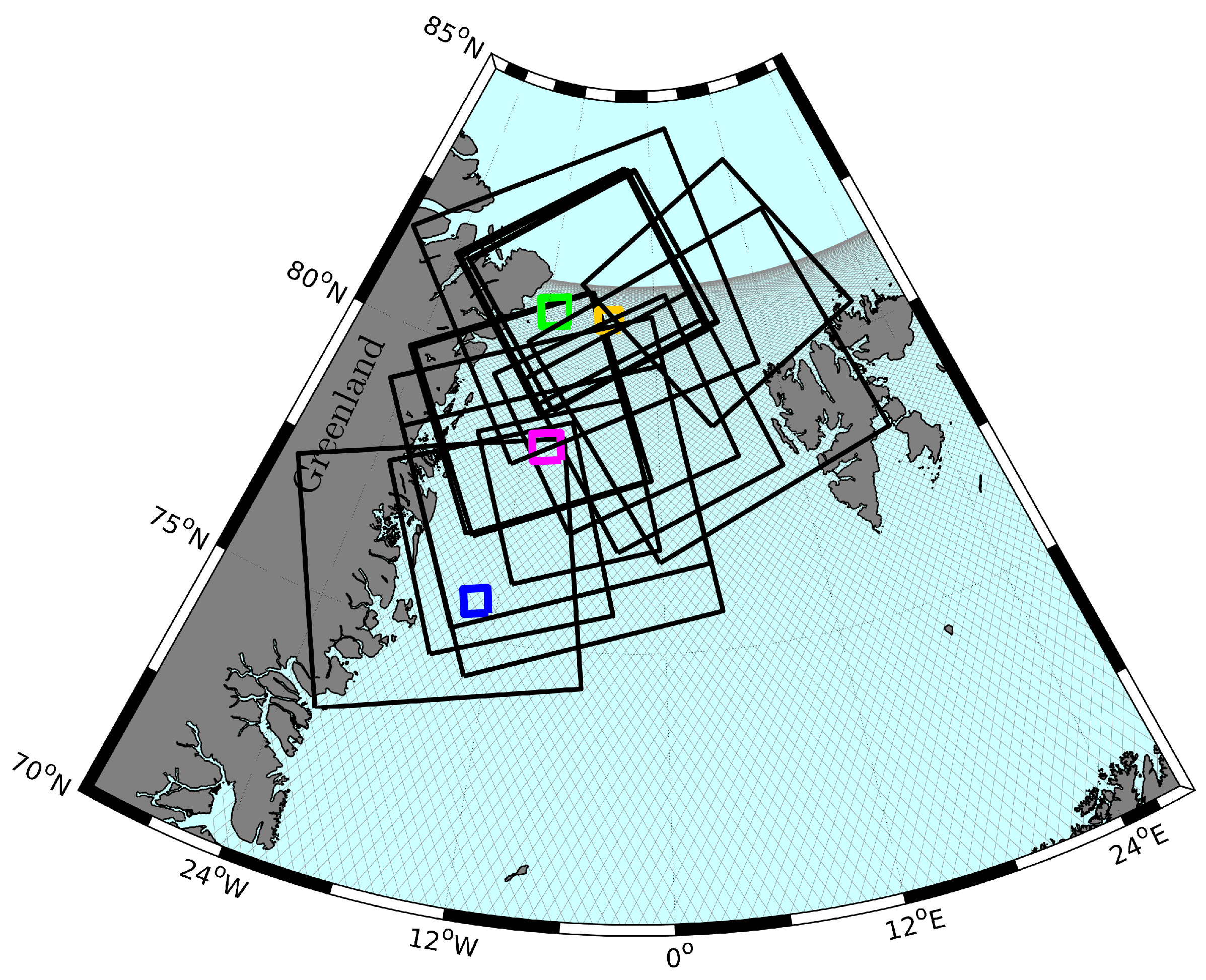
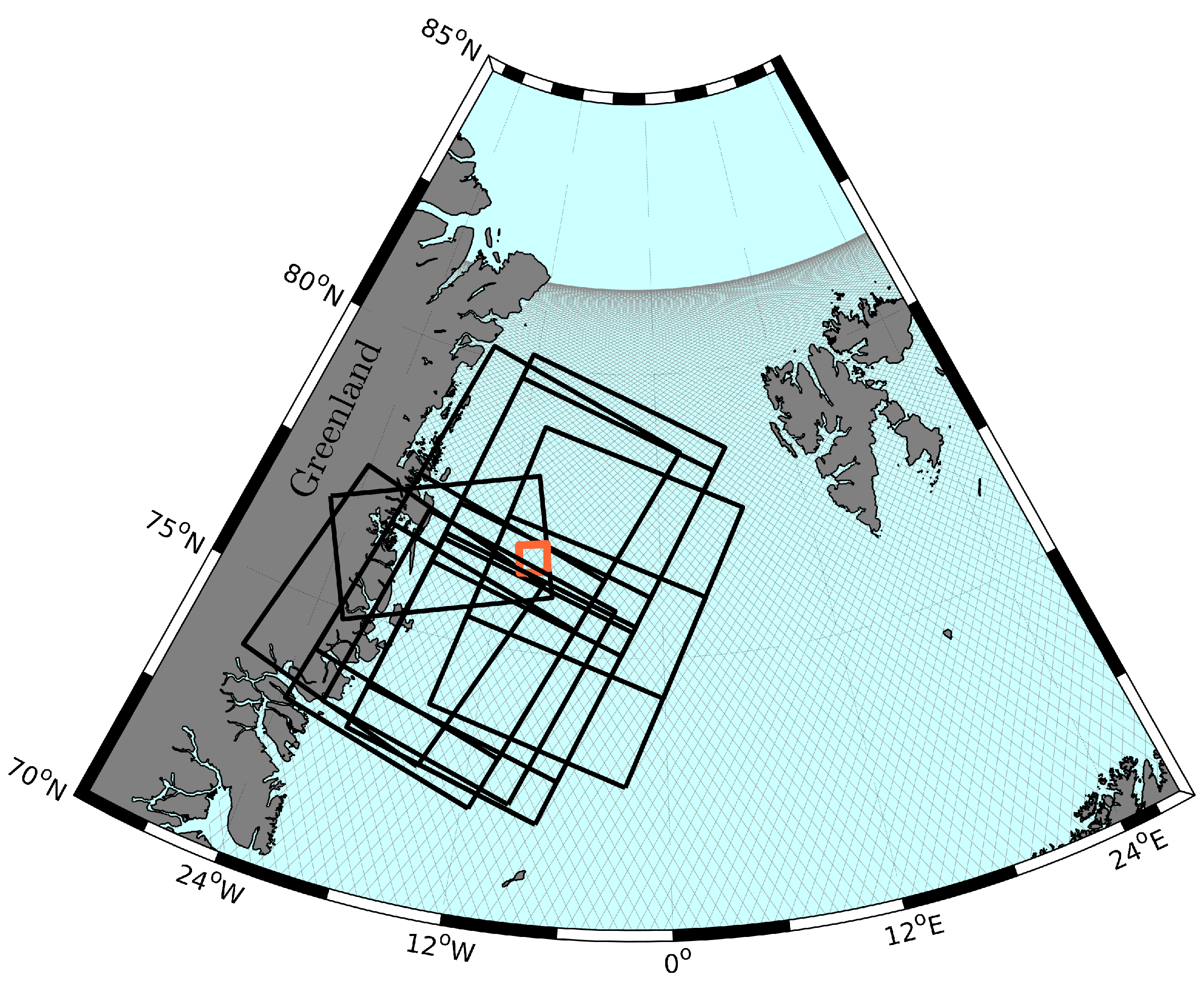
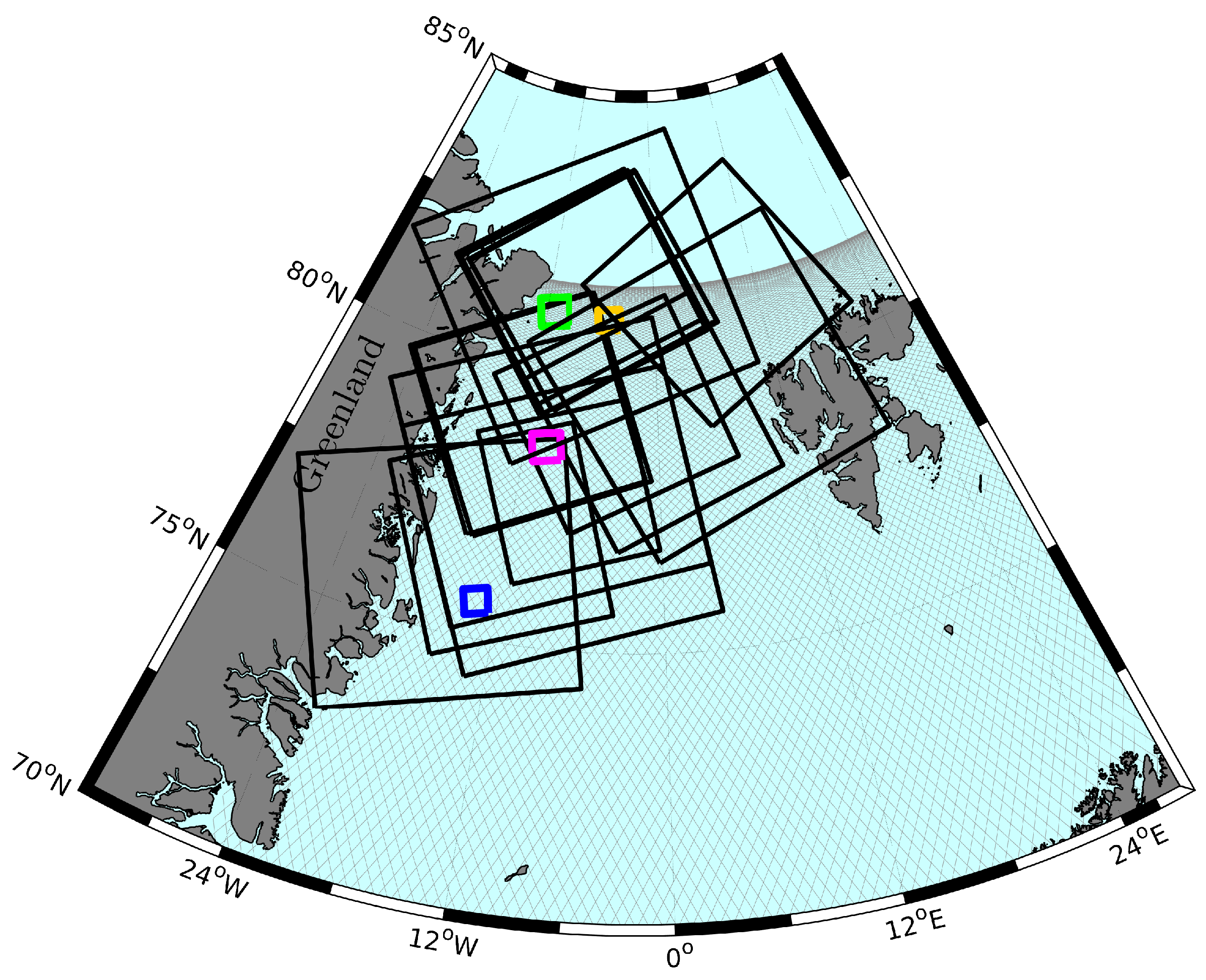
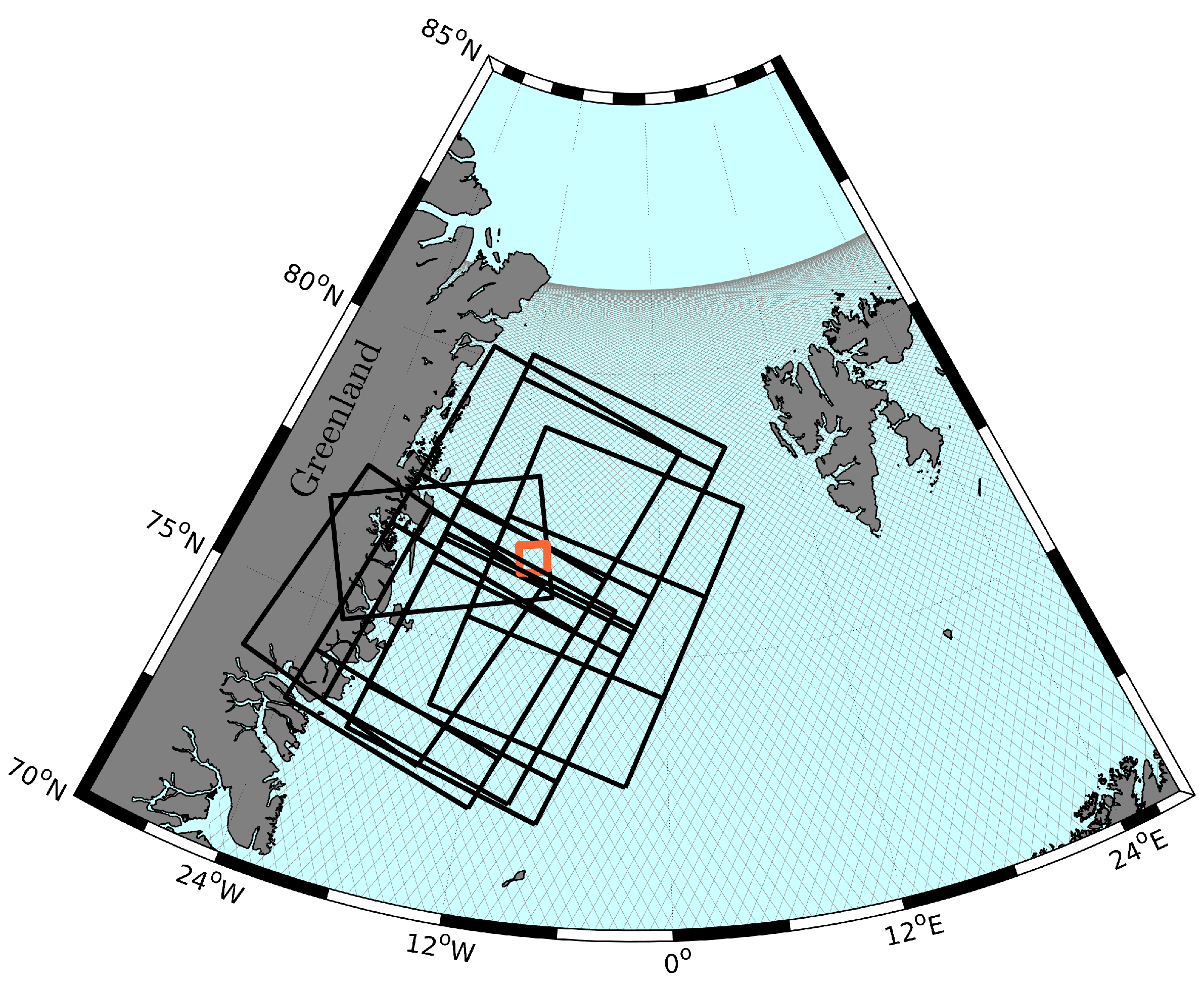
2.1. Greenland Sea and Fram Strait
2.2. Radar Altimetry Data
2.3. Imaging Synthetic Aperture Radar (SAR) Data
2.4. Sea Ice Data
3. Methods
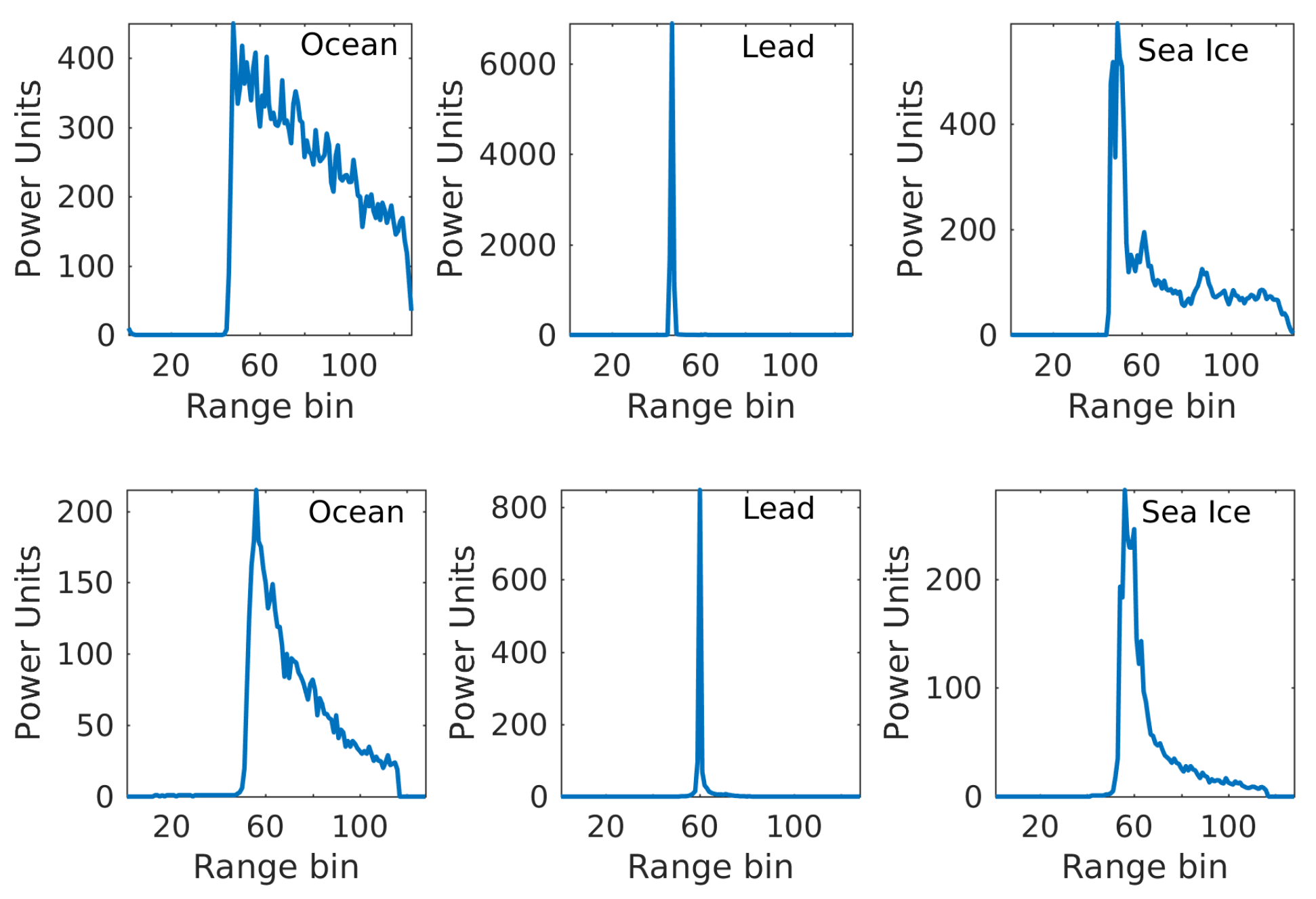
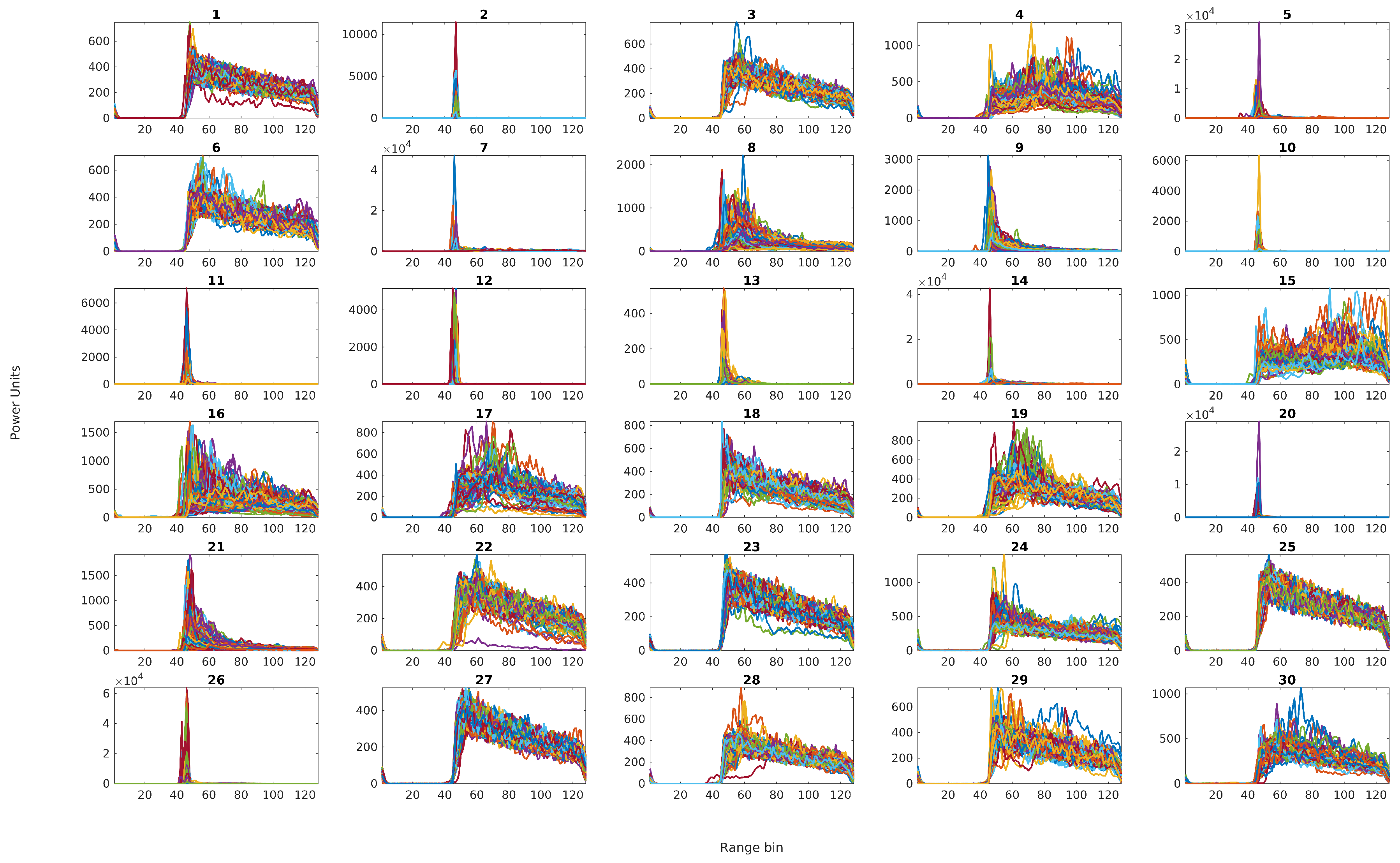
3.1. Waveform Features
- The features should characterize different waveform types.
- The selected features should be stand alone and without linear dependence and major correlations among each other.
- The feature space should be adaptable to any altimetry waveform.
- All features should exhibit the same order of magnitude for equal weighting among each other.
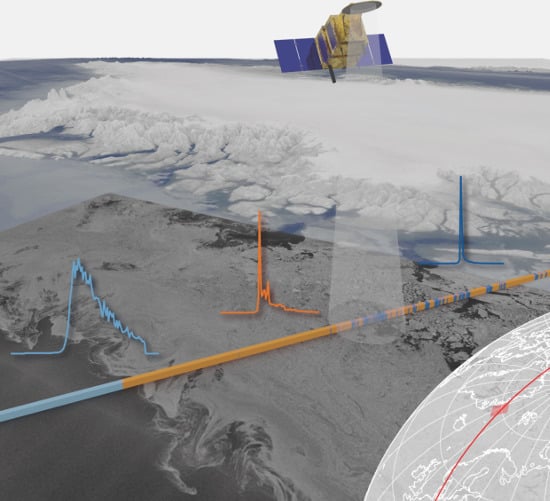
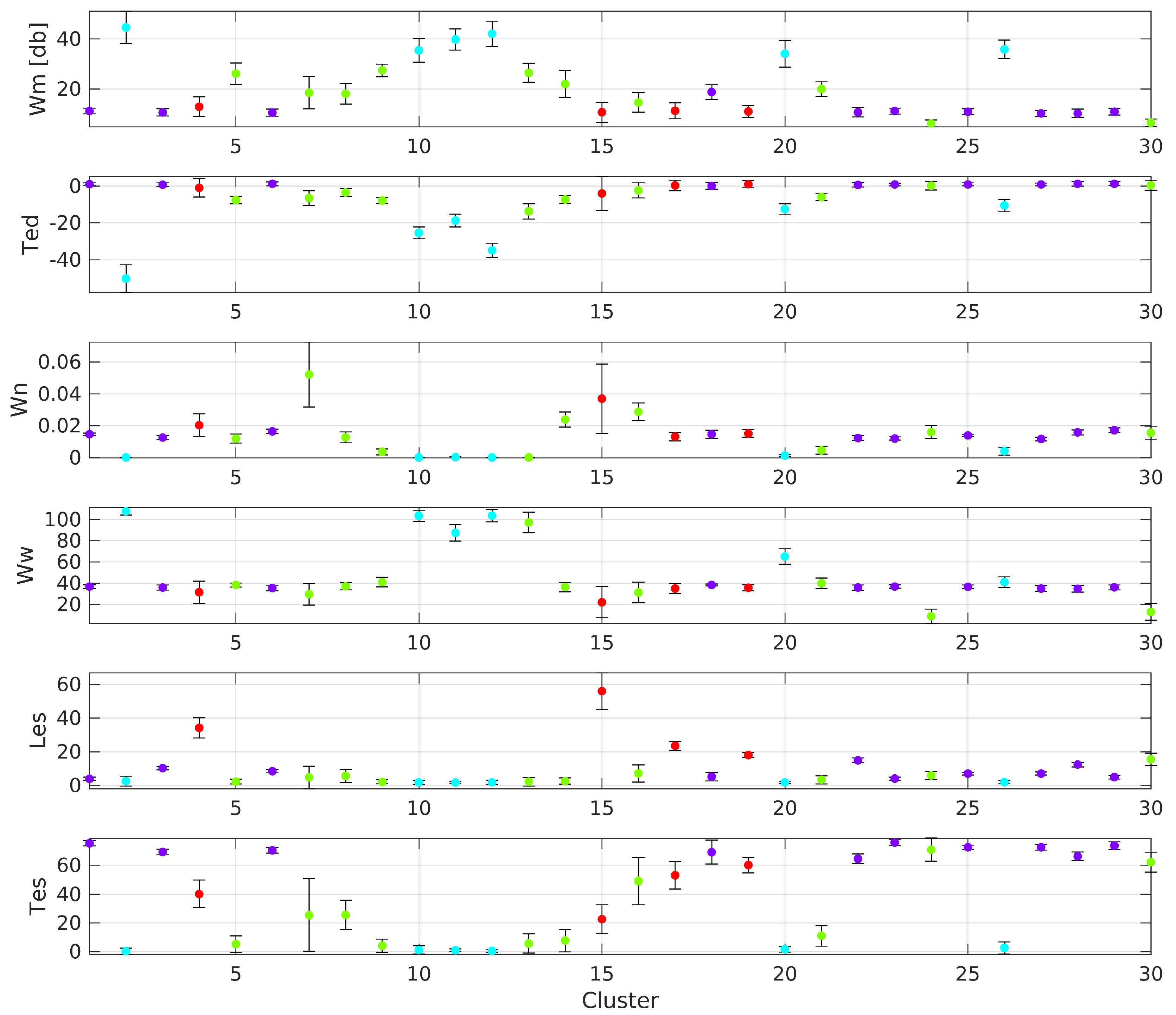
- Waveform maximum (Wm)The waveform height is described by the maximal power of the returning radar pulse . It provides information about the backscatter of calm or rough surface conditions. To compute for Envisat as well as SARAL, the maximum waveform power and mission specific rectifications are applied by using instrumental and atmospheric corrections from the provided datasets (see Section 2.2).
- Trailing edge decline (Ted)The trailing edge decline is computed by fitting an exponential function, considering an exponential decay of AltiKa waveforms, from the waveform power maximum to the last bin. The estimated decay rate is used to characterize the decline of the trailing edge after the maximum.
- Waveform noise (Wn)This feature quantifies the trailing edge scattering. It is computed as median absolute deviations of the trailing edge fitting (see Ted) residuals. This parameter is very small for single peak waveforms (leads) and moderate for oceans.
- Waveform width (Ww)The number of bins where the power is equal to zero provides information about the waveform’s width.
- Leading edge slope (Les)The leading edge slope is obtained by subtracting the first bin position containing more than 30% of the power maximum from the bin position of the maximum power. The difference provides relative information about the width and steepness of the leading edge independent of the absolute position of the leading edge, i.e., the range.
- Trailing edge slope (Tes)In contrast to the leading edge slope, the trailing edge slope is obtained by subtracting the last bin position containing more than 30% of the maximum from the bin position of the maximum power. This difference provides similar information to Ted in the case of single-peak waveforms but supports the identification of strong specular peaks in front of an ocean-like trailing edge.
3.2. Clustering
3.3. Classification
3.4. Validation Approach
- Thermal noise removal (only S-1A)
- Radiometric calibration
- Speckle filter (only Radarsat-2)
- Delay Doppler terrain correction
- Reprojection to Lambert Azimuthal Equal Area map projection
- Converting backscatter values to db
- Datatype conversion in uint8
4. Results and Discussion
4.1. Automatic Comparison to SAR Images
4.2. Visual Comparison
5. Conclusions and Outlook
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Comiso, J. Polar Oceans from Space; Atmospheric and Oceanographic Sciences Library, Springer: New York, NY, USA, 2010. [Google Scholar]
- Stroeve, J.C.; Markus, T.; Boisvert, L.; Miller, J.; Barrett, A. Changes in Arctic melt season and implications for sea ice loss. Geophys. Res. Lett. 2014, 41, 1216–1225. [Google Scholar] [CrossRef]
- Polyakov, I.V.; Beszczynska, A.; Carmack, E.C.; Dmitrenko, I.A.; Fahrbach, E.; Frolov, I.E.; Gerdes, R.; Hansen, E.; Holfort, J.; Ivanov, V.V.; et al. One more step toward a warmer Arctic. Geophys. Res. Lett. 2005, 32, L17605. [Google Scholar] [CrossRef]
- Sasgen, I.; van den Broeke, M.; Bamber, J.L.; Rignot, E.; Sørensen, L.S.; Wouters, B.; Martinec, Z.; Velicogna, I.; Simonsen, S.B. Timing and origin of recent regional ice-mass loss in Greenland. Earth Planet. Sci. Lett. 2012, 333–334, 293–303. [Google Scholar] [CrossRef]
- Laxon, S.W. Sea-Ice Altimeter Processing Scheme at the EODC. Int. J. Remote Sens. 1994, 15, 915–924. [Google Scholar] [CrossRef]
- Rio, M.H.; Hernandez, F. A mean dynamic topography computed over the world ocean from altimetry, in situ measurements, and a geoid model. J. Geophys. Res. Oceans 2004, 109. [Google Scholar] [CrossRef]
- Dwyer, R.; Godin, R. Determining Sea-Ice Boundaries and Ice Roughness Using GEOS-3 Altimeter Data; Technical Report; NASA Wallops Flight Center: Wallops Island, VA, USA, 1980.
- Fetterer, F.M.; Drinkwater, M.R.; Jezek, K.C.; Laxon, S.W.C.; Onstott, R.G.; Ulander, L.M.H. Sea Ice Altimetry. In Microwave Remote Sensing of Sea Ice; American Geophysical Union: Washington, DC, USA, 2013; pp. 111–135. [Google Scholar]
- Laxon, S.; Peacock, N.; Smith, D. High interannual variability of sea ice thickness in the Arctic region. Nature 2003, 425, 947–950. [Google Scholar] [CrossRef] [PubMed]
- Peacock, N.R. Sea surface height determination in the Arctic Ocean from ERS altimetry. J. Geophys. Res. 2004, 109, C07001. [Google Scholar] [CrossRef]
- Connor, L.N.; Laxon, S.W.; Ridout, A.L.; Krabill, W.B.; McAdoo, D.C. Comparison of Envisat radar and airborne laser altimeter measurements over Arctic sea ice. Remote Sens. Environ. 2009, 113, 563–570. [Google Scholar] [CrossRef]
- Zakharova, E.A.; Fleury, S.; Guerreiro, K.; Willmes, S.; Rémy, F.; Kouraev, A.V.; Heinemann, G. Sea Ice Leads Detection Using SARAL/AltiKa Altimeter. Mar. Geod. 2015, 38, 522–533. [Google Scholar] [CrossRef]
- Zygmuntowska, M.; Khvorostovsky, K.; Helm, V.; Sandven, S. Waveform classification of airborne synthetic aperture radar altimeter over Arctic sea ice. Cryosphere 2013, 7, 1315–1324. [Google Scholar] [CrossRef]
- Passaro, M.; Müller, F.L.; Dettmering, D. Lead Detection using Cryosat-2 Delay-Doppler Processing and Sentinel-1 SAR images. Adv. Space Res. 2017. under review. [Google Scholar]
- Rudels, B.; Friedrich, H.J.; Quadfasel, D. The Arctic Circumpolar Boundary Current. Deep-Sea Res. Part II 1999, 46, 1023–1062. [Google Scholar] [CrossRef]
- Serreze, M.; Barry, R. The Arctic Climate System; Cambridge Atmospheric and Space Science Series; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Bersch, M. On the circulation of the northeastern North Atlantic. Deep-Sea Res. Part II 1995, 42, 1583–1607. [Google Scholar] [CrossRef]
- Woodgate, R.A.; Fahrbach, E.; Rohardt, G. Structure and transports of the East Greenland Current at 75∘N from moored current meters. J. Geophys. Res. Oceans 1999, 104, 18059–18072. [Google Scholar] [CrossRef]
- Verron, J.; Sengenes, P.; Lambin, J.; Noubel, J.; Steunou, N.; Guillot, A.; Picot, N.; Coutin-Faye, S.; Sharma, R.; Gairola, R.M.; et al. The SARAL/AltiKa Altimetry Satellite Mission. Mar. Geod. 2015, 38, 2–21. [Google Scholar] [CrossRef]
- Japan Aerospace Exploration Agency (JAXA). ALOS Data Users Handbook, Revision C; Japan Aerospace Exploration Agency: Chofu, Tokyo, Japan, 2008. [Google Scholar]
- MDA. RADARSAT-2 Product Description; Report RN-SP-52-1238, Issue 1/13; MacDonald, Dettwiler and Associates Ltd.: Vancouver, BC, Canada, 2016. [Google Scholar]
- Sentinel-1 Team. Sentinel-1 User Handbook; GMES-S1OP-EOPG-TN-13-0001, Issue Draft; European Space Agency: Paris, France, 2013. [Google Scholar]
- Dierking, W. Sea Ice Monitoring by Synthetic Aperture Radar. Oceanography 2013, 26. [Google Scholar] [CrossRef]
- Jackson, C.R.; Apel, J.R. Synthetic Aperture Radar: Marine User’s Manual; US Department of Commerce, National Oceanic and Atmospheric Administration, National Environmental Satellite, Data, and Information Serve, Office of Research and Applications: Washington, DC, USA, 2004; pp. 81–115.
- Tschudi, M.; Fowler, C.; Maslanik, J.; Stewart, J.S. Polar Pathfinder Daily 25 km EASE-Grid Sea Ice Motion Vectors, Version 3; Subset: Greenland Sea, Date Accessed: 16.11.2016; National Snow and Ice Data Center: Boulder, CO, USA, 2016. [Google Scholar]
- Cavalieri, D.; Parkinson, C.; Gloersen, P.; Zwally, J.H. Sea Ice Concentrations from Nimbus-7 SMMR and DMSP SSM/I-SSMIS Passive Microwave Data, Version 1; Subset: Greenland Sea, Date Accessed: 16.11.2016; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 1996.
- Xu, R.; Wunsch, D.C. Clustering; IEEE Press Series on Computational Intelligence; IEEE Press: Hoboken, NJ, USA; Wiley: Piscataway, NJ, USA, 2009. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning; Springer: New York, NY, USA, 2009; Volume 2, pp. 337–387. [Google Scholar]
- Kohonen, T. Self-Organizing Maps; Springer Series in Information Sciences; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Celebi, M. Partitional Clustering Algorithms; EBL-Schweitzer, Springer International Publishing: Cham, Switzerland, 2014. [Google Scholar]
- Kaufman, L.; Rousseeuw, P.J. Finding Groups in Data: An Introduction to Cluster Analysis; Wiley Series in Probability and Mathematical Statistics; Wiley: New York, NY, USA, 1990. [Google Scholar]
- Kvingedal, B. Sea-Ice Extent and Variability in the Nordic Seas, 1967–2002. In The Nordic Seas: An Integrated Perspective; American Geophysical Union: Washington, DC, USA, 2013; pp. 39–49. [Google Scholar]
- Göttl, F.; Dettmering, D.; Müller, F.L.; Schwatke, C. Lake Level Estimation Based on CryoSat-2 SAR Altimetry and Multi-Looked Waveform Classification. Remote Sens. 2016, 8, 885. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SAR Satellite | Band | Mode | Swath Width (km) | Pixel Size (m) | Period (mm/yyyy) | Altimeter Satellite |
|---|---|---|---|---|---|---|
| ALOS | L-Band | Wide Beam | 250–350 | 100 × 100 | June 2007–May 2008 | Envisat |
| Radarsat-2 | C-Band | Scan SAR Wide | 500 | 50 × 50 | June 2008–present | Envisat/SARAL |
| Sentinel-1A | C-Band | Extra Wide | 400 | 40 × 40 | October 2014–present | SARAL |
| SAR-Satellite | Acquisition Date | Time Gap hh-mm |
|---|---|---|
| ALOS | 14 June 2007 | 02-30 |
| ALOS | 1 October 2007 | 02-57 |
| ALOS | 7 October 2007 | 01-55 |
| ALOS | 10 November 2007 | 03-07 |
| ALOS | 10 December 2007 | 02-50 |
| ALOS | 26 December 2007 | 02-13 |
| ALOS | 5 January 2008 | 02-40 |
| ALOS | 7 January 2008 | 01-46 |
| ALOS | 12 January 2008 | 02-49 |
| ALOS | 4 May 2008 | 01-25 |
| R-2 | 4 November 2008 | 01-47 |
| R-2 | 20 April 2009 | 02-09 |
| 00-29 | ||
| R-2 | 21 April 2009 | 02-07 |
| R-2 | 10 February 2010 | 03-04 |
| 01-52 | ||
| R-2 | 14 March 2010 | 00-13 |
| 01-27 | ||
| R-2 | 16 October 2010 | 02-04 |
| Acquisition Date | Time Gap hh-mm |
|---|---|
| 23 October 2014 | 02-41 |
| 16 November 2014 | 03-34 |
| 14 November 2014 | 02-49 |
| 18 November 2014 | 02-42 |
| 3 December 2014 | 02-40 |
| 6 December 2014 | 02-58 |
| 27 December 2014 | 03-33 |
| 1 January 2015 | 02-59 |
| 15 January 2015 | 03-20 |
| 18 January 2015 | 03-27 |
| 16 March 2015 | 03-08 |
| 6 February 2015 | 03-29 |
| 6 February 2015 | 03-28 |
| 10 February 2015 | 03-22 |
| 22 February 2015 | 02-59 |
| 2 March 2015 | 02-44 |
| 9 March 2015 | 02-56 |
| 19 April 2015 | 02-53 |
| 15 May 2015 | 02-54 |
| Alt (Water) | Alt (Ice) | ∑ | |
|---|---|---|---|
| SAR (water) | 1124 | 837 | 1961 |
| SAR (ice) | 3569 | 9495 | 13064 |
| ∑ | 4693 | 10332 | 15025 |
| Alt (Water) | Alt (Ice) | ∑ | |
| SAR (water) | 987 | 2600 | 3587 |
| SAR (ice) | 2007 | 14325 | 16332 |
| ∑ | 2994 | 16925 | 19919 |
| Subset | ||||
|---|---|---|---|---|
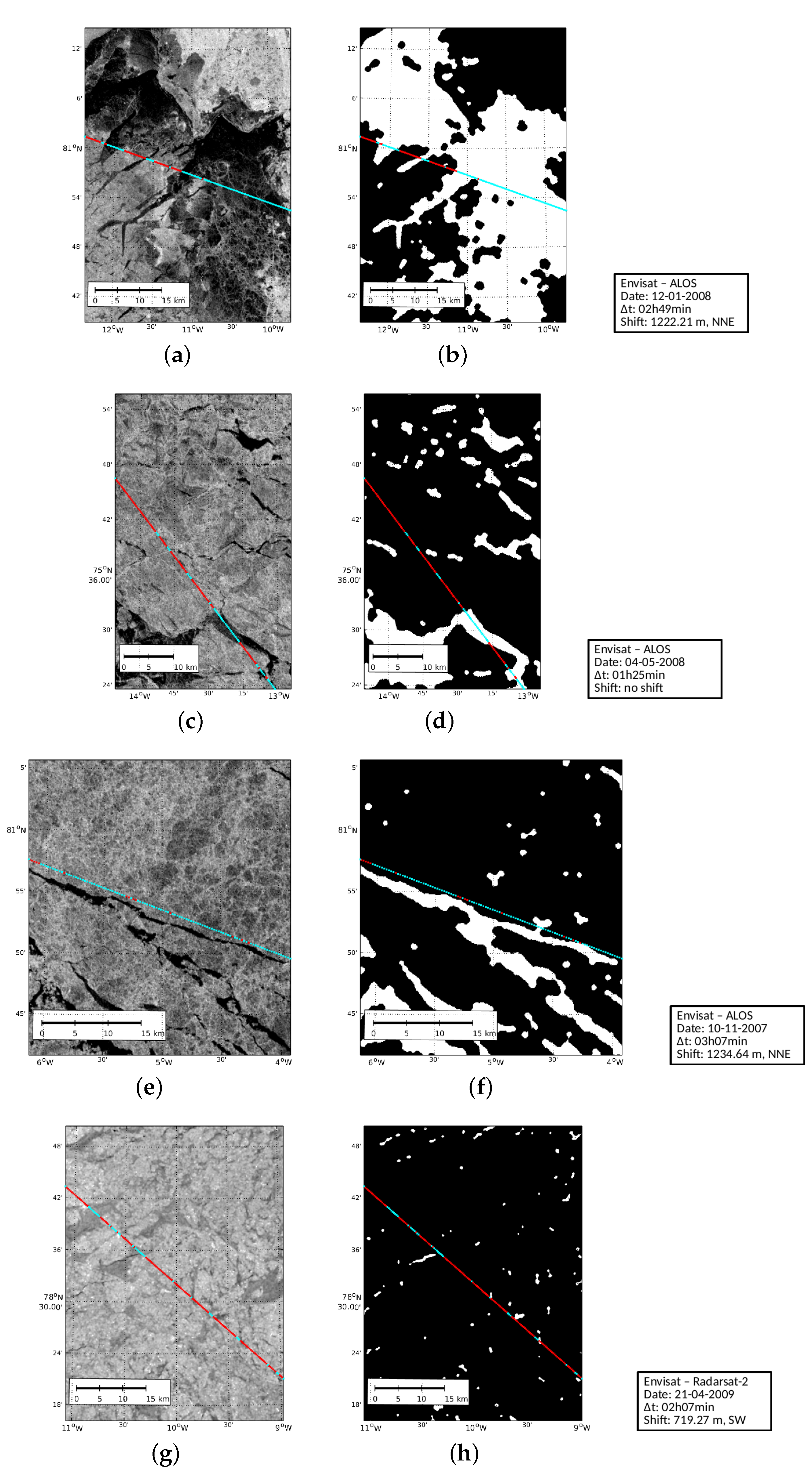
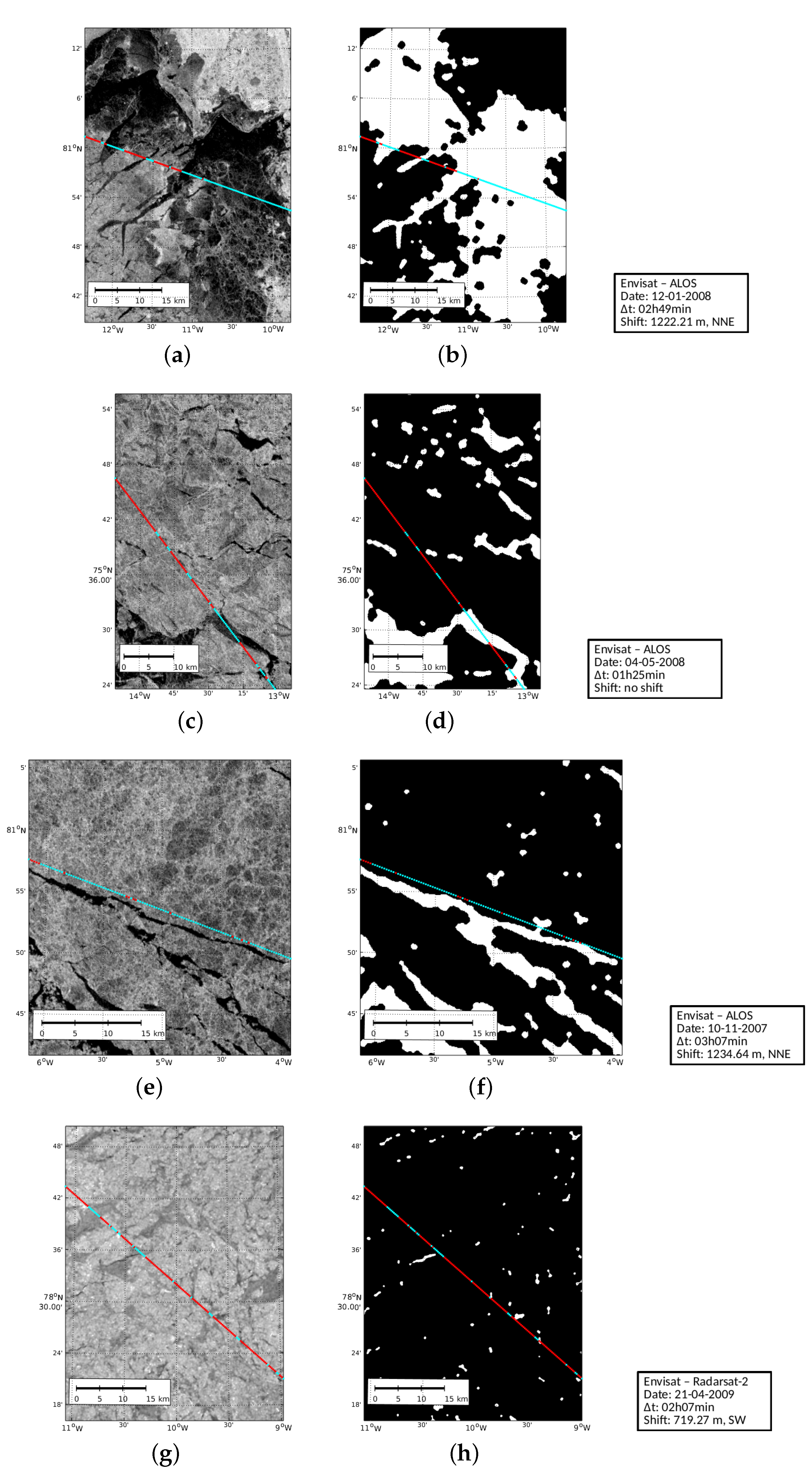
| Figure 7b | 90.63% | 15.91% | 91.86% | 94.05% |
| Figure 7d | 85.10% | 16.04% | 64.58% | 88.57% |
| Figure 7f | 12.61% | 88.99% | 2.02% | 100.00% |
| Figure 7h | 76.22% | 22.36% | 0.00% | 0.00% |
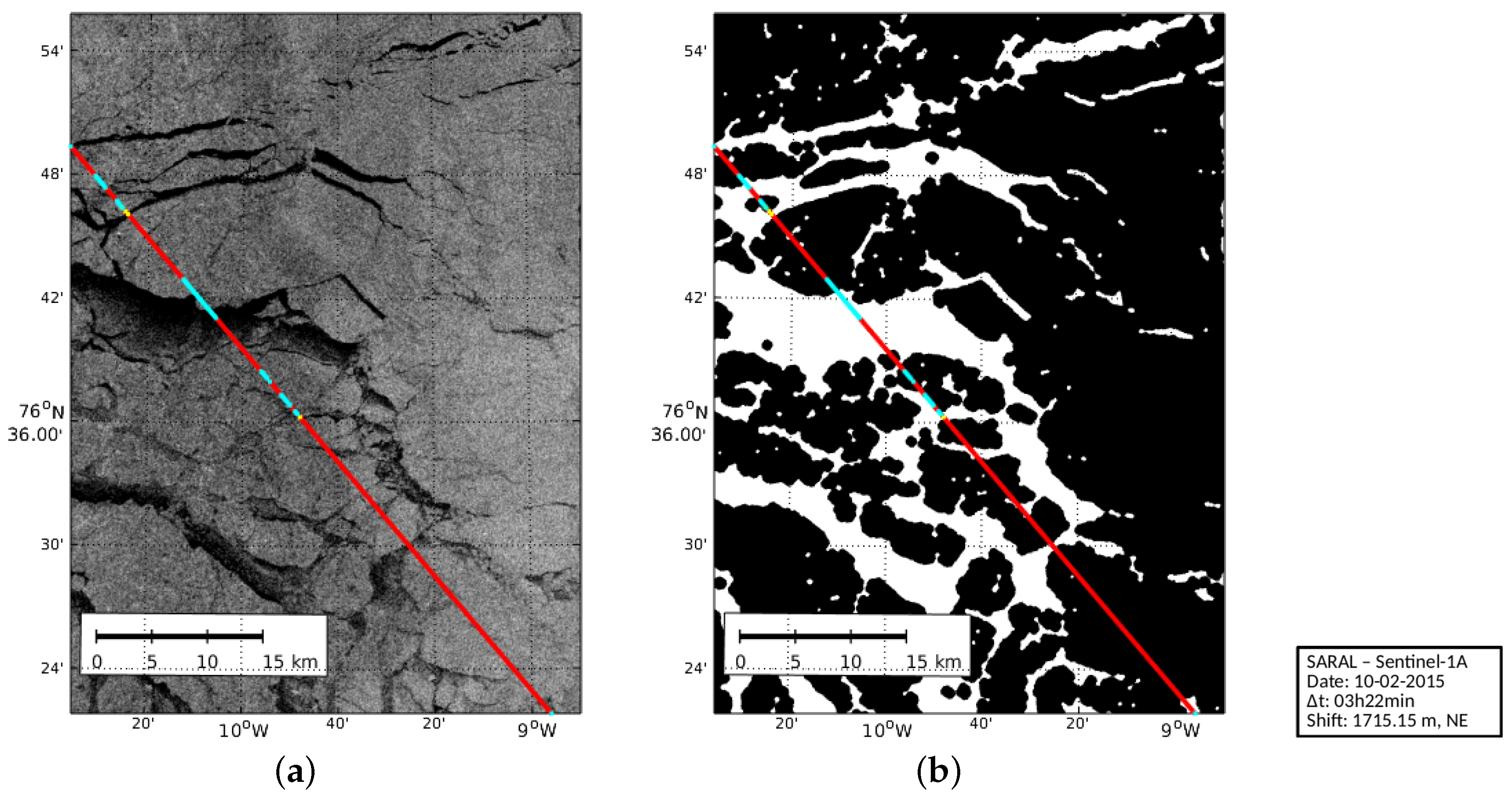
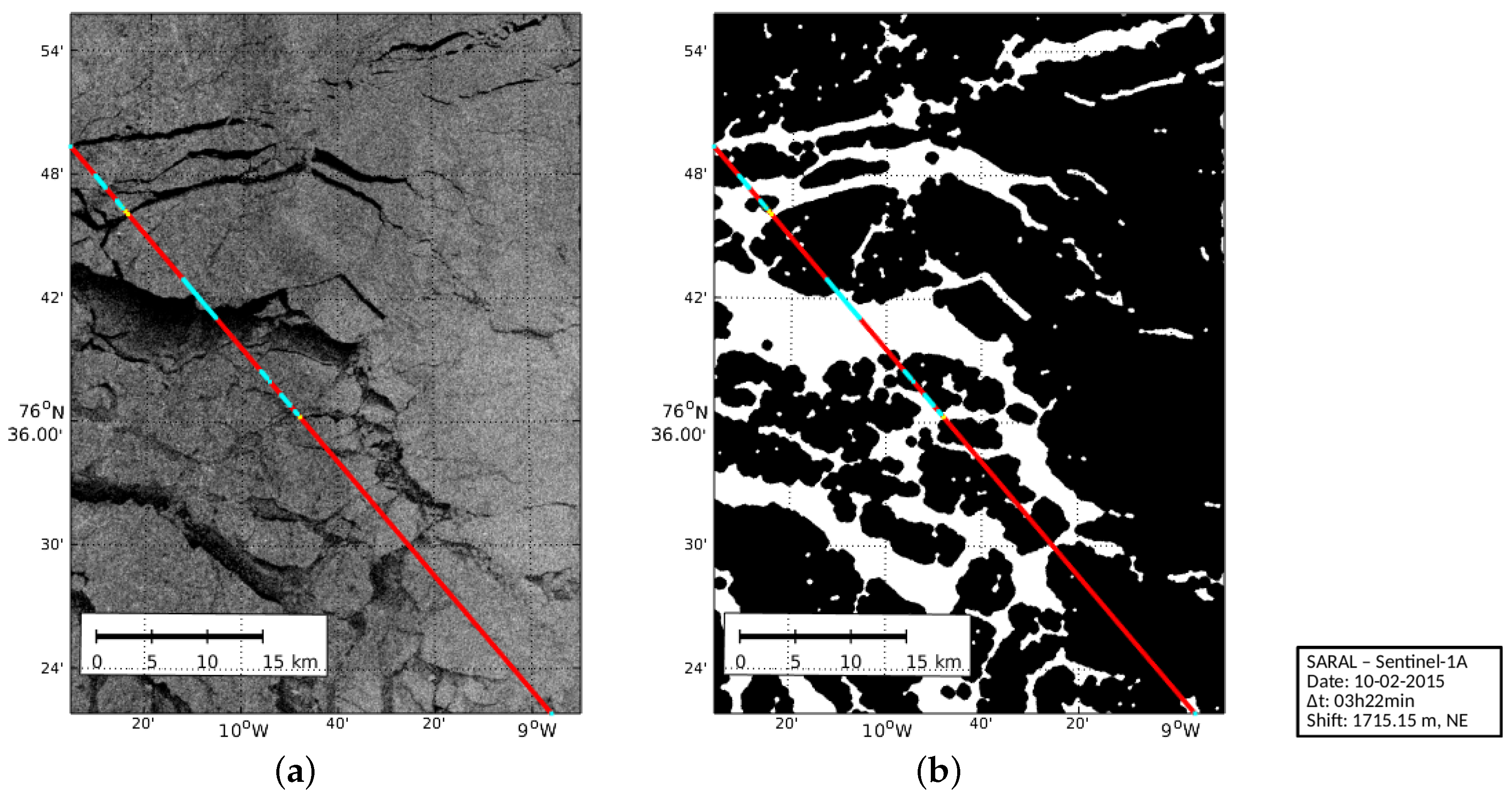
| Figure 8b | 72.07% | 12.41% | 40.68% | 25.53% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Müller, F.L.; Dettmering, D.; Bosch, W.; Seitz, F. Monitoring the Arctic Seas: How Satellite Altimetry Can Be Used to Detect Open Water in Sea-Ice Regions. Remote Sens. 2017, 9, 551. https://doi.org/10.3390/rs9060551
Müller FL, Dettmering D, Bosch W, Seitz F. Monitoring the Arctic Seas: How Satellite Altimetry Can Be Used to Detect Open Water in Sea-Ice Regions. Remote Sensing. 2017; 9(6):551. https://doi.org/10.3390/rs9060551
Chicago/Turabian StyleMüller, Felix L., Denise Dettmering, Wolfgang Bosch, and Florian Seitz. 2017. "Monitoring the Arctic Seas: How Satellite Altimetry Can Be Used to Detect Open Water in Sea-Ice Regions" Remote Sensing 9, no. 6: 551. https://doi.org/10.3390/rs9060551
APA StyleMüller, F. L., Dettmering, D., Bosch, W., & Seitz, F. (2017). Monitoring the Arctic Seas: How Satellite Altimetry Can Be Used to Detect Open Water in Sea-Ice Regions. Remote Sensing, 9(6), 551. https://doi.org/10.3390/rs9060551