
The Use of Unmanned Aerial Systems in Marine Mammal Research

Abstract
:
1. Introduction
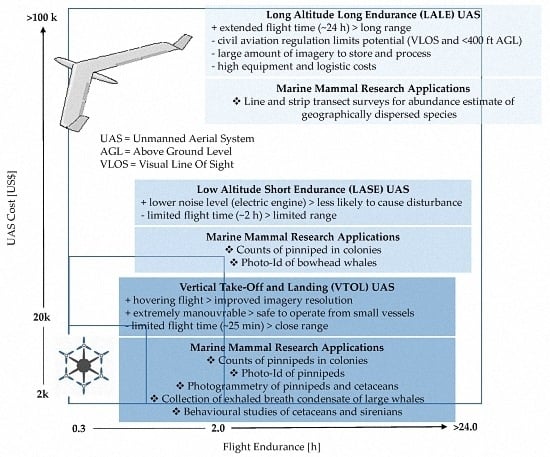
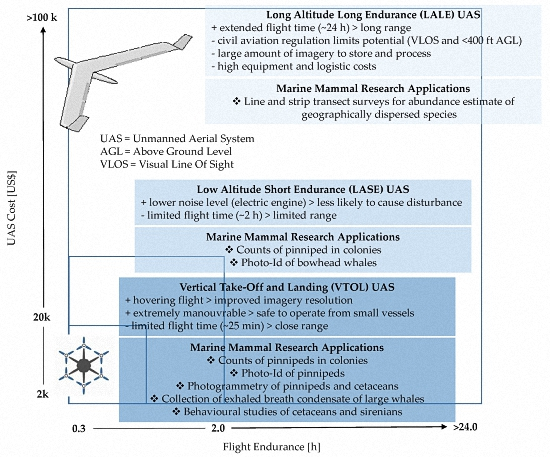
2. Unmanned Aerial Systems
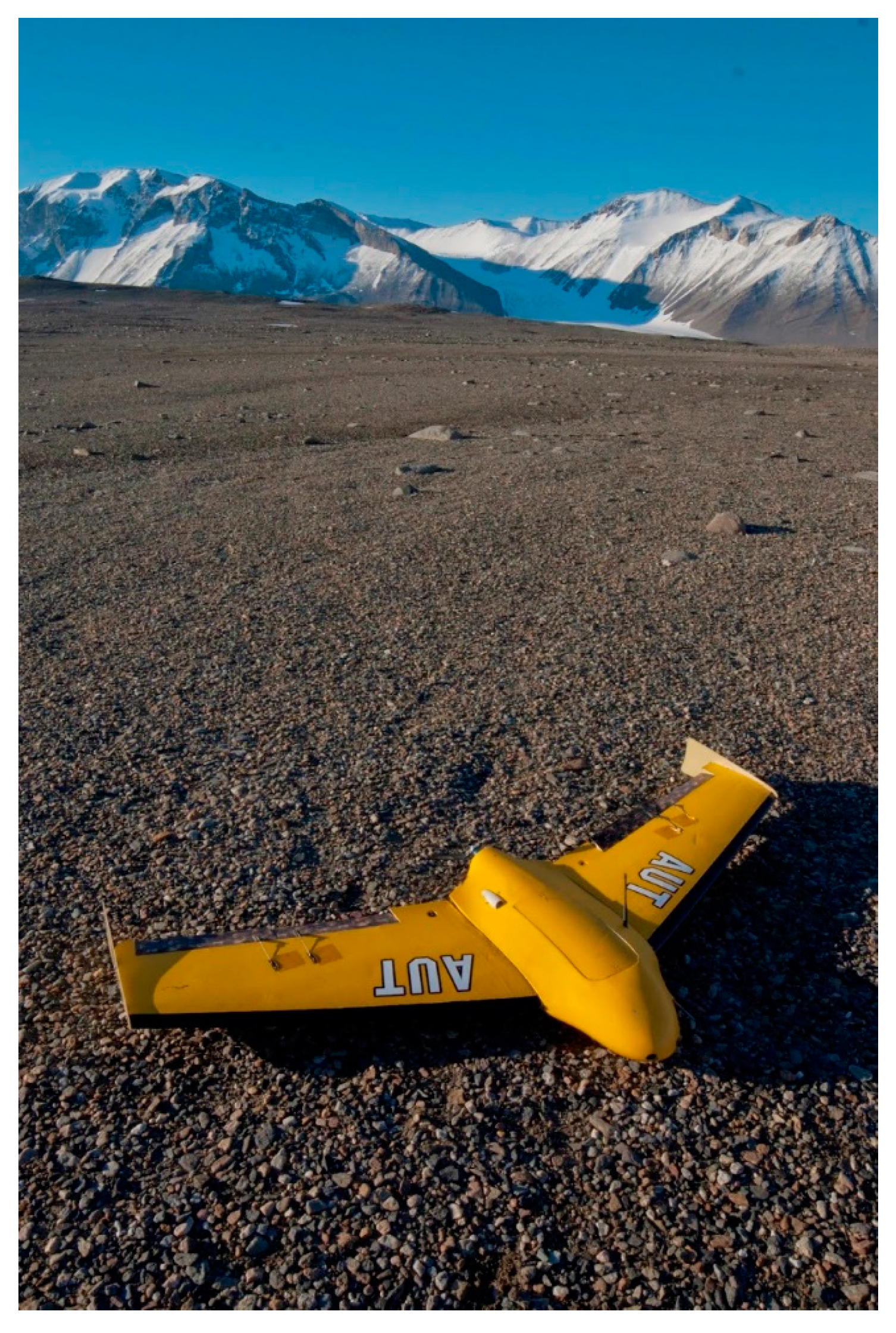
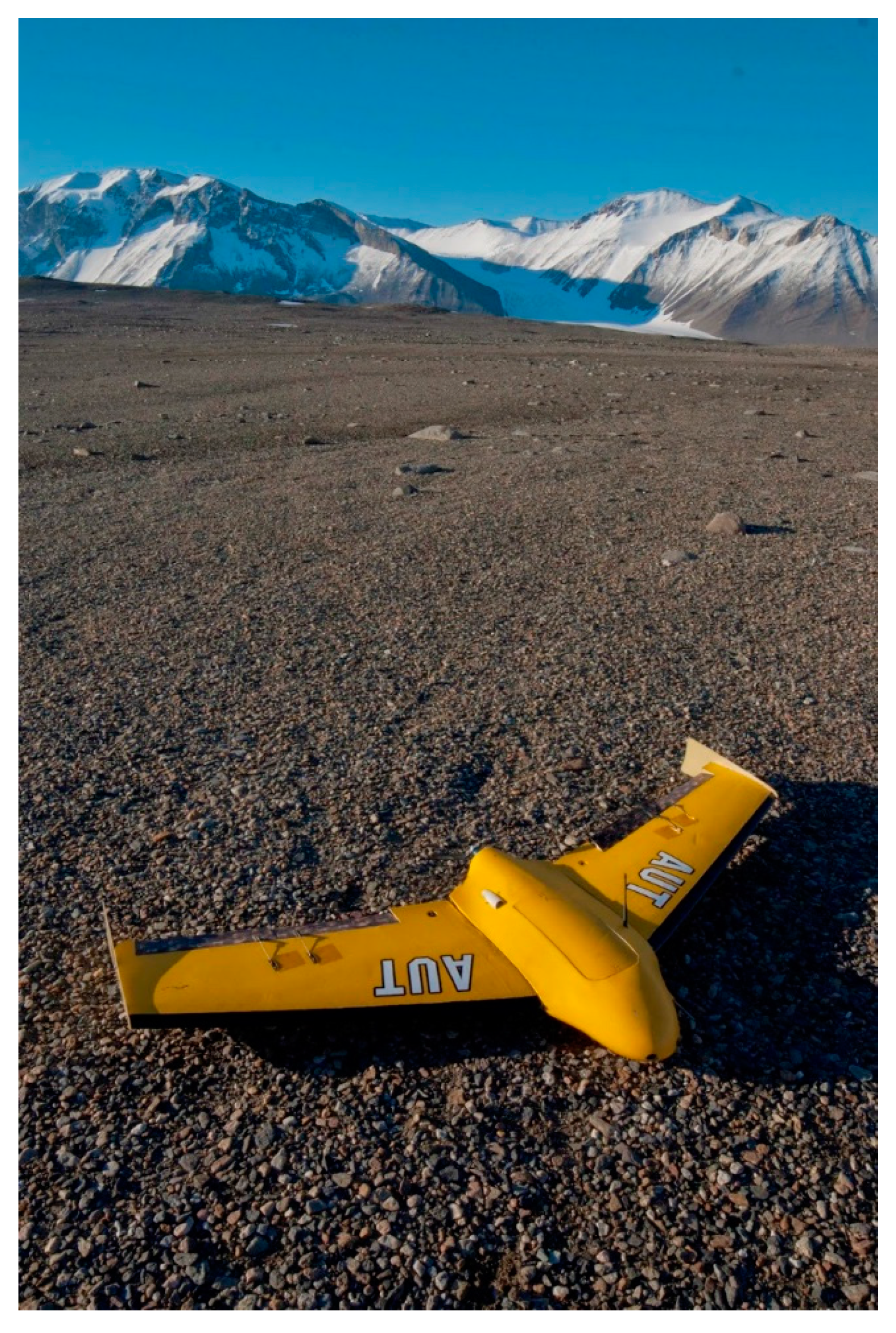
- Low altitude long endurance (LALE) UAS. Fixed-wing aircraft capable of long endurance (>4 h) at low altitude (<3000 m above ground level, AGL). Small aircraft (<4 m wingspan; 2 kg payload capacity; <20 kg take-off weight, Figure 1);
- Low altitude short endurance (LASE) UAS. Fixed-wing aircraft capable of short endurance (1–2 h) at low altitude. Generally, these aircraft are generally smaller than LALE (<2.5 m wingspan; <1 kg payload; <5 kg take-off weight), electrically powered and—in some cases—can be hand-launched (Figure 2);
3. Low Altitude Long Endurance (LALE) UAS
4. Low Altitude Short Endurance (LASE) UAS
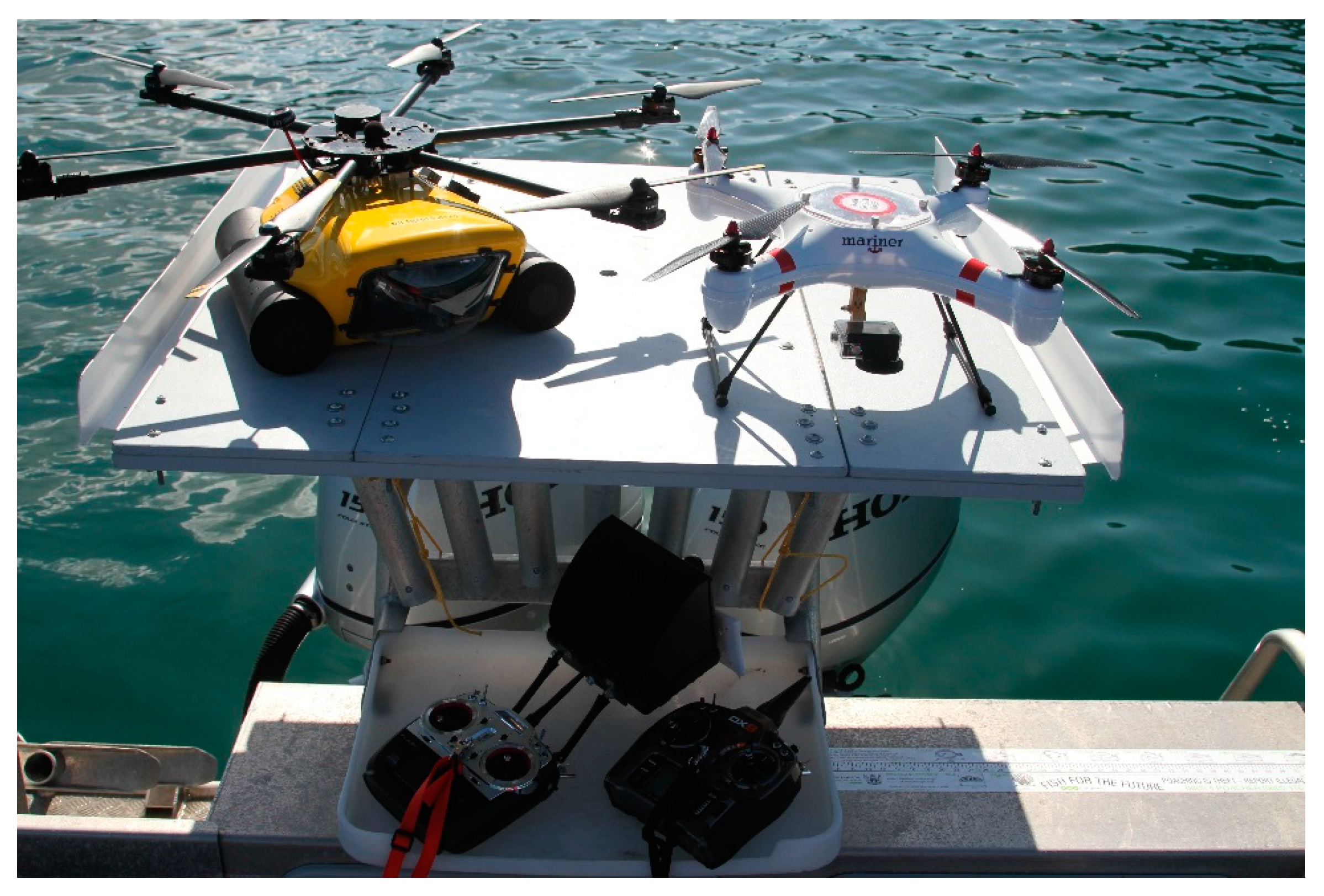
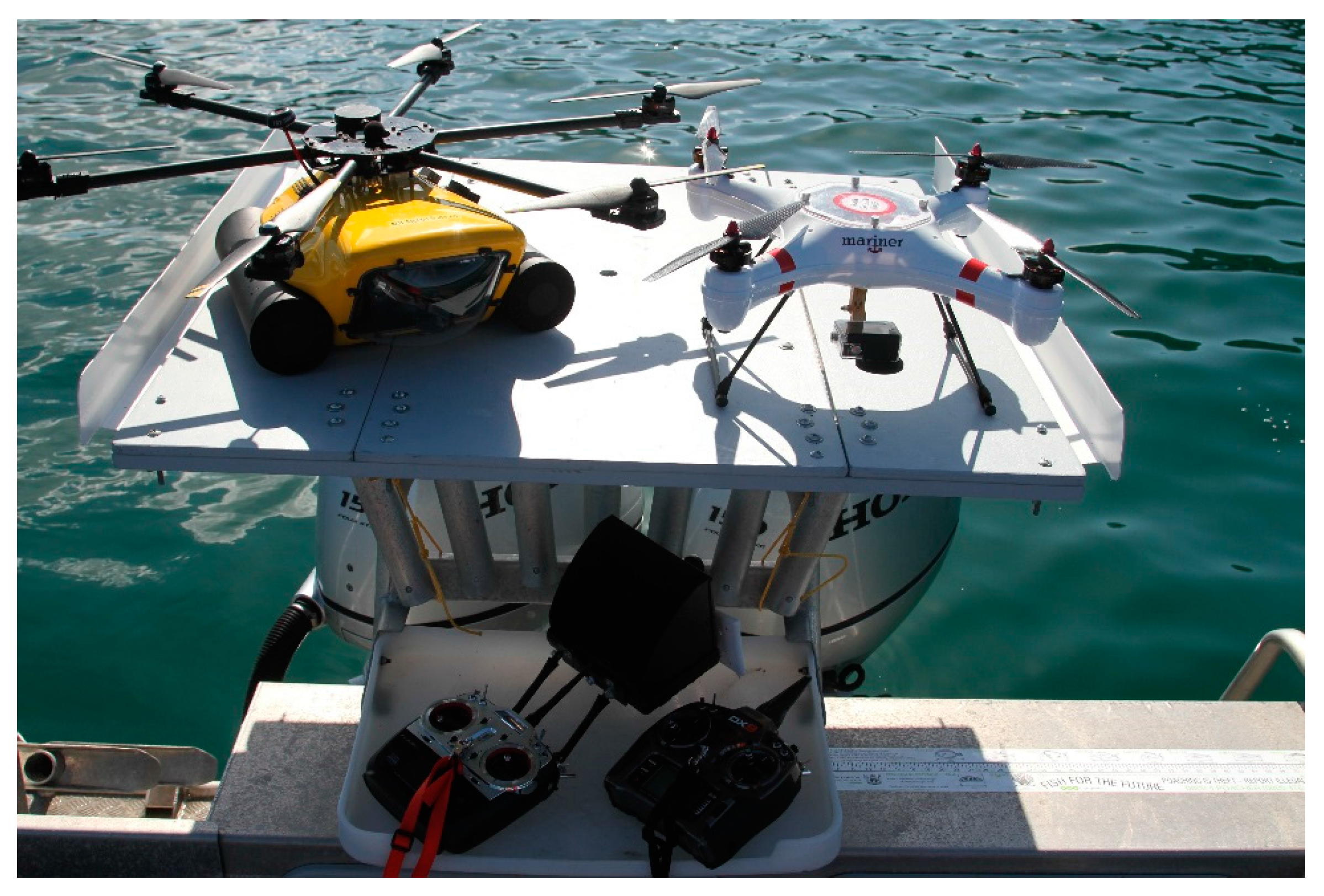
5. Vertical Take-Off and Landing (VTOL) UAS
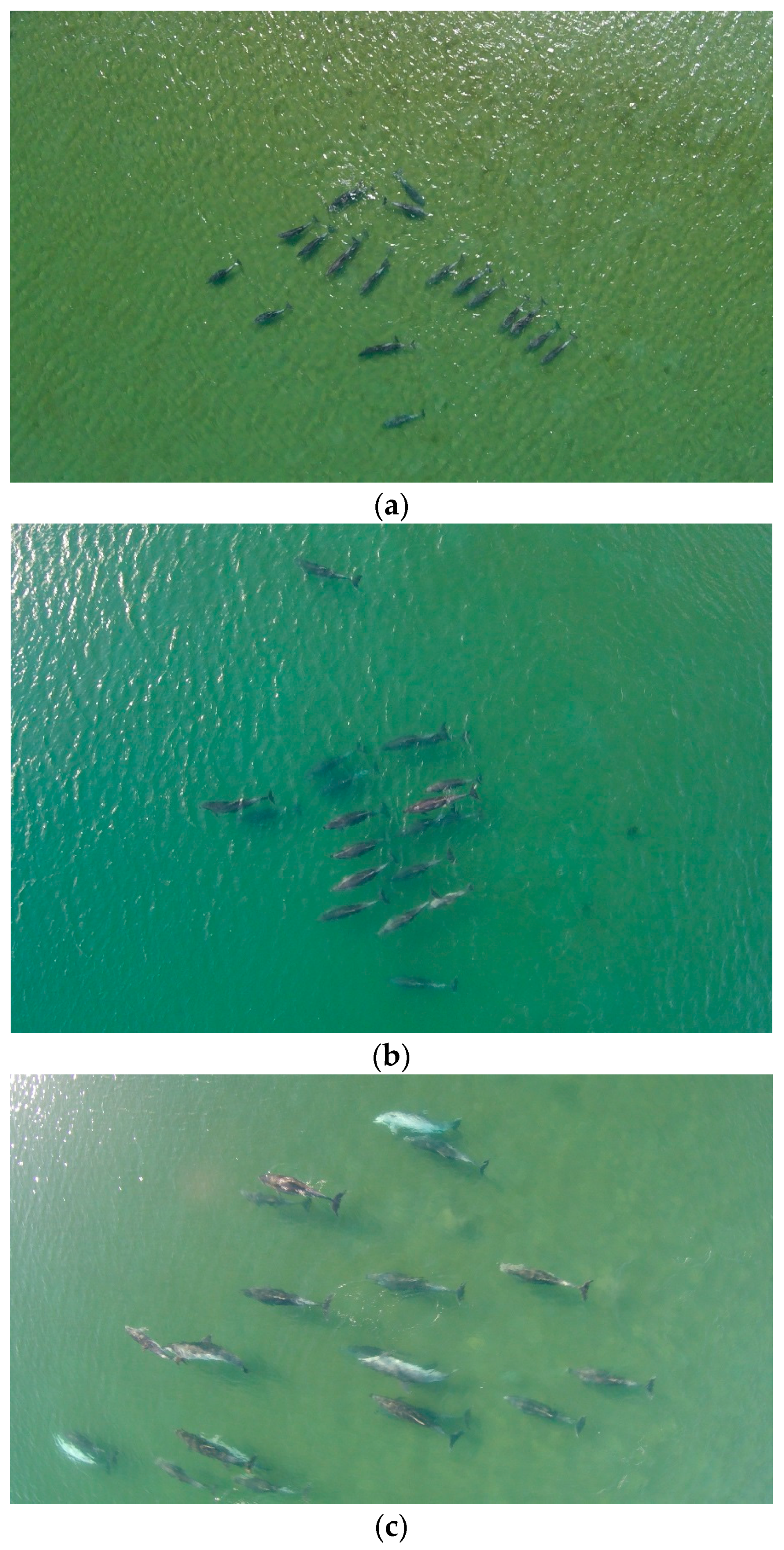
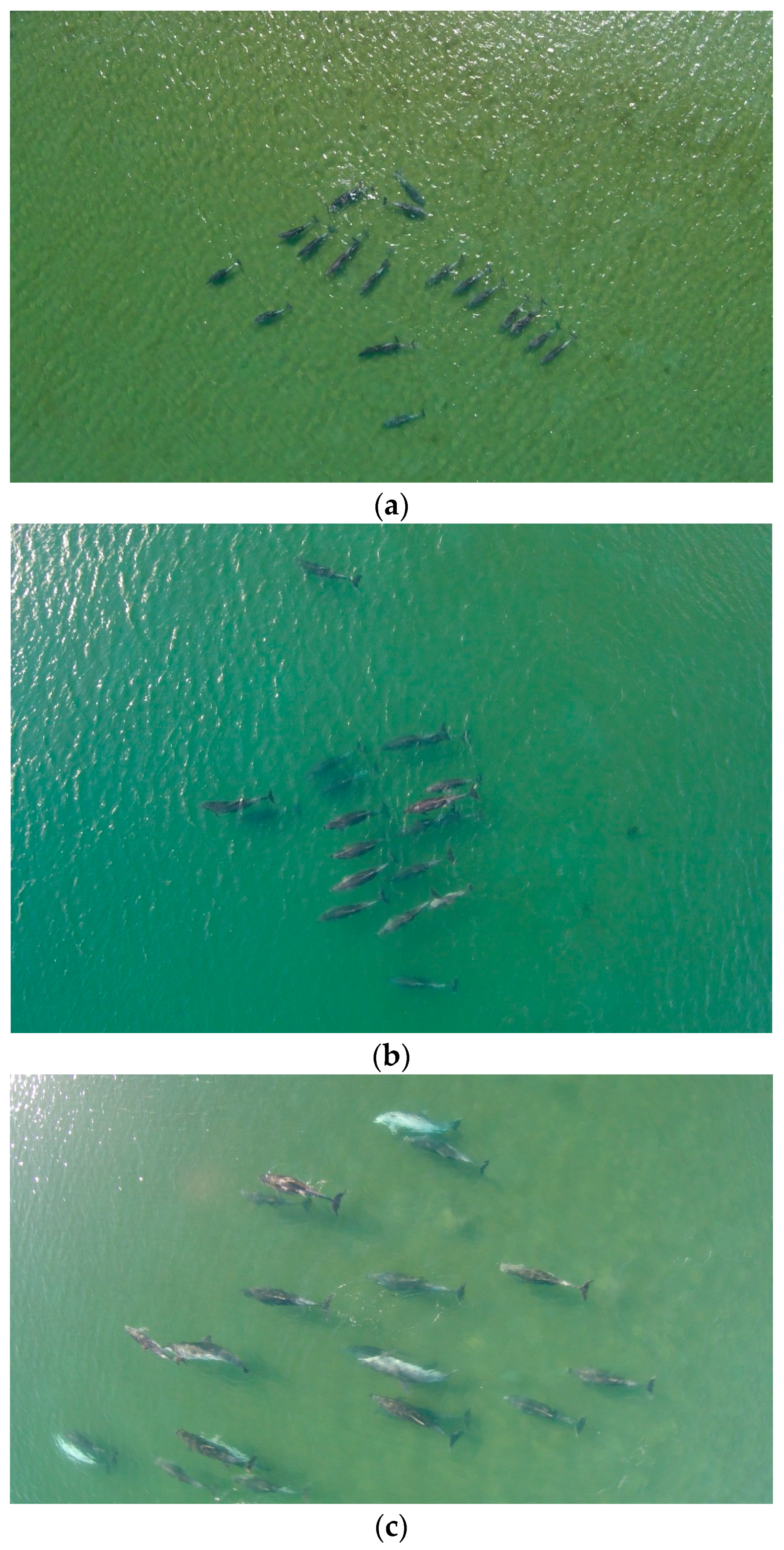
5.1. Abundance Surveys, Photogrammetry, and Photo-Identification
5.2. Whale Plume Sampling and Behavioral Studies
6. Unmanned Aerial System Regulations
- Outside controlled airspace: fly below 400 feet or 121.92 m above ground level (AL);
- Airport no fly zone (NFZ): do not fly closer than 5 nautical miles or 9.26 km to airports;
- Fly in visual line of sight (VLOS): always maintain visual line of sight on the UAS;
- City NFZ: do not fly over densely populated areas;
- Building/vehicles NFZ: maintain safe distance from building and vehicles on the flight path.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UASS) the future of wildlife monitoring? A review of accomplishments and challenges. Mamm. Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Christiansen, F.; Rojano-Doñate, L.; Madsen, P.T.; Bejder, L. Noise levels of multi-rotor unmanned aerial vehicles with implications for potential underwater impacts on marine mammals. Front. Mar. Sci. 2016, 3, 277. [Google Scholar] [CrossRef]
- Christiansen, F.; Dujon, A.M.; Sprogis, K.R.; Arnould, J.P.Y.; Bejder, L. Noninvasive unmanned aerial vehicle provides estimates of the energetic cost of reproduction in humpback whales. Ecosphere 2016, 7, 1–18. [Google Scholar] [CrossRef]
- Smith, C.E.; Sykora-Bodie, S.T.; Bloodworth, B.; Pack, S.M.; Spradlin, T.R.; LeBoeuf, N.R. Assessment of known impacts of unmanned aerial systems (UAS) on marine mammals: Data gaps and recommendations for researchers in the united states. J. Unmanned Veh. Syst. 2016, 4, 1–14. [Google Scholar] [CrossRef]
- Nowacek, D.P.; Christiansen, F.; Bejder, L.; Goldbogen, J.A.; Friedlaender, A.S. Studying cetacean behaviour: New technological approaches and conservation applications. Anim. Behav. 2016, 120, 235–244. [Google Scholar] [CrossRef]
- Koski, W.R.; Gamage, G.; Davis, A.R.; Mathews, T.; LeBlanc, B.; Ferguson, S.H. Evaluation of uas for photographic re-identification of bowhead whales, Balaena mysticetus. J. Unmanned Veh. Syst. 2015, 3, 22–29. [Google Scholar] [CrossRef]
- Goebel, M.E.; Perryman, W.L.; Hinke, J.T.; Krause, D.J.; Hann, N.A.; Gardner, S.; LeRoi, D.J. A small unmanned aerial system for estimating abundance and size of antarctic predators. Polar Biol. 2015, 38, 619–630. [Google Scholar] [CrossRef]
- Durban, J.; Fearnbach, H.; Barrett-Lennard, L.; Perryman, W.; LeRoi, D. Photogrammetry of killer whales using a small hexacopter launched at sea. J. Unmanned Veh. Syst. 2015, 3, 131–135. [Google Scholar] [CrossRef]
- Development and Use of Uass by the National Marine Fisheries Service for Surveying Marine Mammals; Marine Mammal Commission: Bethesda, MD, USA, 2016.
- Seymour, A.C.; Dale, J.; Hammill, M.; Halpin, P.N.; Johnston, D.W. Automated detection and enumeration of marine wildlife using unmanned aircraft systems (UAS) and thermal imagery. Sci. Rep. 2017, 7, 45127. [Google Scholar] [CrossRef] [PubMed]
- Sweeney, K.L.; Helker, V.T.; Perryman, W.L.; LeRoi, D.J.; Fritz, L.W.; Gelatt, T.S.; Angliss, R.P. Flying beneath the clouds at the edge of the world: Using a hexacopter to supplement abundance surveys of steller sea lions (Eumetopias jubatus) in Alaska. J. Unmanned Veh. Syst. 2015, 4, 1–12. [Google Scholar] [CrossRef]
- Pomeroy, P.; O’Connor, L.; Davies, P. Assessing use of and reaction to unmanned aerial systems in gray and harbor seals during breeding and molt in the UK. J. Unmanned Veh. Syst. 2015, 3, 102–113. [Google Scholar] [CrossRef]
- Moreland, E.E.; Cameron, M.F.; Angliss, R.P.; Boveng, P.L. Evaluation of a ship-based unoccupied aircraft system (uas) for surveys of spotted and ribbon seals in the bering sea pack ice. J. Unmanned Veh. Syst. 2015, 3, 114–122. [Google Scholar] [CrossRef]
- Hodgson, A.; Kelly, N.; Peel, D. Unmanned aerial vehicles (UAVS) for surveying marine fauna: A dugong case study. PLoS ONE 2013, 8, e79556. [Google Scholar] [CrossRef] [PubMed]
- Jones, G.P.; Pearlstine, L.G.; Percival, H.F. An assessment of small unmanned aerial vehicles for wildlife research. Wildl. Soc. Bull. 2006, 34, 750–758. [Google Scholar] [CrossRef]
- Hodgson, A.; Peel, D.; Kelly, N. Unmanned aerial vehicles for surveying marine fauna: Assessing detection probability. Ecol. Appl. 2017. [Google Scholar] [CrossRef] [PubMed]
- Durban, J.W.; Moore, M.J.; Chiang, G.; Hickmott, L.S.; Bocconcelli, A.; Howes, G.; Bahamonde, P.A.; Perryman, W.L.; LeRoi, D.J. Photogrammetry of blue whales with an unmanned hexacopter. Mar. Mamm. Sci. 2016, 32, 1510–1515. [Google Scholar] [CrossRef]
- Rekdal, S.L.; Hansen, R.G.; Borchers, D.; Bachmann, L.; Laidre, K.L.; Wiig, O.; Nielsen, N.H.; Fossette, S.; Tervo, O.; Heide-Jorgensen, M.P. Trends in bowhead whales in West Greenland: Aerial surveys vs. Genetic capture-recapture analyses. Mar. Mamm. Sci. 2015, 31, 133–154. [Google Scholar] [CrossRef]
- Panigada, S.; Lauriano, G.; Burt, L.; Pierantonio, N.; Donovan, G. Monitoring winter and summer abundance of cetaceans in the Pelagos Sanctuary (Northwestern Mediterranean Sea) through aerial surveys. PLoS ONE 2011, 6, e22878. [Google Scholar] [CrossRef] [PubMed]
- Dawson, S.; Wade, P.; Slooten, E.; Barlow, J. Design and field methods for sighting surveys of cetaceans in coastal and riverine habitats. Mamm. Rev. 2008, 38, 19–49. [Google Scholar] [CrossRef]
- Pollock, K.H.; Marsh, H.D.; Lawler, I.R.; Alldredge, M.W. Estimating animal abundance in heterogeneous environments: An application to aerial surveys for dugongs. J. Wildl. Manag. 2006, 70, 255–262. [Google Scholar] [CrossRef]
- Buckland, S.T.; Anderson, D.R.; Burnham, K.P.; Laake, J.L.; Borchers, D.L.; Thomas, L. Introduction to Distance Sampling: Estimating Abundance of Biological Populations; Chapman & Hall: New York, NY, USA, 2001. [Google Scholar]
- Hiby, L.; Lovell, P. Using aircraft in tandem formation to estimate abundance of harbour porpoise. Biometrics 1998, 54, 1280–1289. [Google Scholar] [CrossRef]
- Koski, W.R.; Allen, T.; Ireland, D.; Buck, G.; Smith, P.R.; Macrander, A.M.; Halick, M.A.; Rushing, C.; Sliwa, D.J.; McDonald, T.L. Evaluation of an unmanned airborne system for monitoring marine mammals. Aquat. Mamm. 2009, 35, 347–357. [Google Scholar] [CrossRef]
- Perryman, W.L.; Lynn, M.S. Evaluation of nutritive condition and reproductive status of migrating gray whales (Eschrichtius robustus) based on analysis of photogrammetric data. J. Cetacean Res. Manag. 2002, 4, 155–164. [Google Scholar]
- Miller, C.A.; Best, P.B.; Perryman, W.L.; Baumgartner, M.F.; Moore, M.J. Body shape changes associated with reproductive status, nutritive condition and growth in right whales Eubalaena glacialis and E. Australis. Mar. Ecol. Prog. Ser. 2012, 459, 135–156. [Google Scholar] [CrossRef]
- Smultea, M.A.; Mobley, J.R.J.; Fertl, D.; Fulling, G.L. An unusual reaction and other observations of sperm whales near fixed-wing aircraft. Gulf Carrabbean Res. 2008, 20, 75–80. [Google Scholar] [CrossRef]
- Patenaüde, N.J.; Richardson, W.J.; Smultea, M.A.; Koski, W.R.; Miller, G.W.; Würsig, B.; Greene, C.R. Aircraft sound and disturbance to bowhead and beluga whales during spring migration in the alaskan beaufort sea. Mar. Mamm. Sci. 2002, 18, 309–335. [Google Scholar] [CrossRef]
- Würsig, B.; Lynn, S.K.; Jefferson, T.A.; Mullin, K.D. Behaviour of cetaceans in the Northern Gulf of Mexico relative to survey ships and aircraft. Aquat. Mamm. 1998, 24, 41–50. [Google Scholar]
- Richardson, W.J.; Würsig, B. Influences of man-made noise and other human actions on cetacean behaviour. Mar. Freshw. Behav. Physiol. 1997, 29, 183–209. [Google Scholar] [CrossRef]
- Smultea, M.A.; Fertl, D.; Bacon, C.E.; Moore, M.R.; James, V.R.; Würsig, B. Cetacean mother-calf behavior observed from a small aircraft off southern California. Anim. Behav. Cognit. 2017, 4, 1–23. [Google Scholar]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Marsh, H.; Sinclair, D.F. Correcting for visibility bias in strip transect aerial surveys of acquatic fauna. J. Wildl. Manag. 1989, 53, 1017–1024. [Google Scholar] [CrossRef]
- Koski, W.R.; Abgrall, P.; Yazvenko, S.B. An inventory and evaluation of unmanned aerial systems for offshore surveys of marine mammals. J. Cetacean Res. Manag. 2010, 11, 239–247. [Google Scholar]
- Angliss, R.P.; Ferguson, P.; Kennedy, A. Manned vs unmanned aerial surveys of cetaceans in the arctic: Operations and preliminary results. In Proceedings of the Noaa Uas Users Symposium, La Jolla, CA, USA, 25–27 October 2016. [Google Scholar]
- Barasona, J.A.; Mulero-Pazmany, M.; Acevedo, P.; Negro, J.J.; Torres, M.J.; Gortazar, C.; Vicente, J. Unmanned aircraft systems for studying spatial abundance of ungulates: Relevance to spatial epidemiology. PLoS ONE 2014, 9, e115608. [Google Scholar] [CrossRef] [PubMed]
- Vermulen, C.; Lejeune, P.; Lisein, J.; Sawadogo, P.; Bouche, P. Unmanned aerial survey of elephants. PLoS ONE 2013, 8, e54700. [Google Scholar] [CrossRef] [PubMed]
- Mulero-Pazmany, M.; Stolper, R.; Van Essen, L.D.; Negro, J.J.; Sassen, T. Remotely piloted aircraft systems as a rhinoceros anti-poaching tool in africa. PLoS ONE 2014, 9, e83873. [Google Scholar] [CrossRef] [PubMed]
- Chabot, D.; Craik, S.R.; Bird, D.M. Population census of a large common tern colony with a small unmanned aircraft. PLoS ONE 2015, 10, e0122588. [Google Scholar] [CrossRef] [PubMed]
- Sarda-Palomera, F.; Bota, G.; Vinolo, C.; Pallares, O.; Sazatornil, V.; Brotons, L.; Gomariz, S.; Sarda, F. Fine-scale bird monitoring from light unmanned aircraft systems. IBIS 2012, 154, 177–183. [Google Scholar] [CrossRef]
- Chabot, D.; Bird, D.M. Evaluation of an off-the-shelf unmanned aircraft system for surveying flocks of geese. Waterbirds 2012, 35, 170–174. [Google Scholar] [CrossRef]
- Chabot, D.; Carignan, V.; Bird, D.M. Measuring habitat quality for least bitterns in a created wetland with use of a small unmanned aircraft. Wetlands 2014, 34, 527–533. [Google Scholar] [CrossRef]
- Bollard-Breen, B.; Brooks, J.D.; Jones, M.R.L.; Robertson, J.; Betschart, S.; Kung, O.; Craig Cary, S.; Lee, C.K.; Pointing, S.B. Application of an unmanned aerial vehicle in spatial mapping of terrestrial biology and human disturbance in the McMurdo Dry Valleys, East Antarctica. Polar Biol. 2015, 38, 573–578. [Google Scholar] [CrossRef]
- Funaki, M.; Hirasawa, N. Outline of a small unmanned aerial vehicle (ant-plane) designed for antarctic research. Polar Sci. 2008, 2, 129–142. [Google Scholar] [CrossRef]
- Wu, H.X.; Liu, Q.J.; Guo, S.W. Composites of graphene and lifepo4 as cathode materials for lithium-ion battery: A mini-review. Nano-Micro Lett. 2014, 6, 316–326. [Google Scholar] [CrossRef]
- Kucinskis, G.; Bajars, G.; Kleperis, J. Graphene in lithium ion battery cathode materials: A review. J. Power Sources 2013, 240, 66–79. [Google Scholar] [CrossRef]
- Perryman, W.L.; Goebel, M.E.; Ash, N.; LeRoi, D.J.; Gardner, S. Small Unmanned Aerial Systems for Estimating Abundance of Krill-Dependent Predators: A Feasibility Study with Preliminary Results; National Oceanic and Atmosferic Administration; Southwest Fisheries Science Center: La Jolla, CA, USA, 2014; pp. 64–72.
- Dawson, S. Drone Success in Expedition Measuring Southern Right Whales; Department of Marine Science, University of Otago: Dunedin, New Zealand, 2016. [Google Scholar]
- Pater, L.; Grubb, T.; Delaney, D.K. Recommendations for improved assessment of noise impacts on wildlife. J. Wildl. Manag. 2009, 73, 788–795. [Google Scholar] [CrossRef]
- Southall, B.L.; Bowles, A.E.; Ellison, W.T.; Finneran, J.; Gentry, R.; Green, C.R.; Kastak, C.R.; Ketten, D.R.; Miller, J.H.; Nachtigall, P.E.; et al. Marine mammal noise exposure criteria: Initial scientific recommendations. Aquat. Mamm. 2007, 33, 411–521. [Google Scholar] [CrossRef]
- Acevedo-Whitehouse, K.; Rocha-Gosselin, A.; Gendron, D. A novel non-invasive tool for disease surveillance of free-ranging whales and its relevance to conservation programs. Anim. Conserv. 2010, 13, 217–225. [Google Scholar] [CrossRef]
- Fettermann, T. Assessing the behavioral responses of wild bottlenose dolphins (Tursiops truncatus) to a lightweight multirotor unmanned aerial vehicle (UAV). Unpublished work, Manuscript in preparation.
- Fiori, L. Assessing the effects of humpback whale-based tourism in Vava’u, Kingdom of Tonga: Behavioral responses of whales to vessels and in-water tourism activities. Unpublished work.
- Richter, C.F.; Dawson, S.; Slooten, E. Impacts of commercial whale watching on male sperm whales at kaikoura, new zealand. Mar. Mamm. Sci. 2006, 22, 46–63. [Google Scholar] [CrossRef]
- Nowacek, S.M.; Wells, R.S.; Owen, E.C.G.; Speakman, T.R.; Flamm, R.O.; Nowacek, D.P. Florida manatees, Trichechus manatus latirostris, respond to approaching vessels. Biol. Conserv. 2004, 119, 517–523. [Google Scholar] [CrossRef]
- Nowacek, D.P. Sequential foraging behaviour of bottlenose dolphins, Tursiops truncatus, in Sarasota Bay, FL. Behaviour 2002, 139, 1125–1145. [Google Scholar] [CrossRef]
- Nowacek, D.P.; Tyack, P.L.; Wells, R.S. A platform for continuous behavioral and acoustic observation of free-ranging marine mammals: Overhead video combined with underwater audio. Mar. Mamm. Sci. 2001, 17, 191–199. [Google Scholar] [CrossRef]
- Flamm, R.O.; Owen, E.C.G.; Owen, C.F.W.; Wells, R.S.; Nowacek, D. Aerial videogrammetry from a tethered airship to assess manatee life-stage structure. Mar. Mamm. Sci. 2000, 16, 617–630. [Google Scholar] [CrossRef]
- Hodgson, A. Blimp-cam aerial video observations of marine mammals. Mar. Technol. Soc. J. 2007, 41, 39–43. [Google Scholar] [CrossRef]
- Guerra, M.; Dawson, S.M.; Brough, T.E.; Rayment, W.J. Effects of boats on the surface and acoustic behaviour of an endangered population of bottlenose dolphins. Endanger. Species Res. 2014, 24, 221–236. [Google Scholar] [CrossRef]
- Unmanned Aircraft Systems (UAS). Available online: https://www.icao.int/Meetings/UAS/Documents/Circular%20328_en.pdf (accessed on 14 March 2017).
- Operation and Certification of Small Unmanned Aircraft Systems; Transportation. Available online: https://www.federalregister.gov/documents/2016/06/28/2016-15079/operation-and-certification-of-small-unmanned-aircraft-systems (accessed on 14 March 2017).
- Ditmer, M.A.; Vincent, J.B.; Werden, L.K.; Tanner, J.C.; Laske, T.G.; Iaizzo, P.A.; Garshelis, D.L.; Fieberg, J.R. Bears show a physiological but limited behavioral response to unmanned aerial vehicles. Curr. Biol. 2015, 25, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Hodgson, J.C.; Koh, L.P. Best practice for minimising unmanned aerial vehicle disturbance to wildlife in biological field research. Curr. Biol. 2016, 26, 404–405. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Objective of the Study | UAS Class/Model | Sensor |
|---|---|---|
| Collection of exhaled breath condensate of large whales [52] | VTOL 1/Aquacopter | N/A |
| Photogrammetry of Humpback whales (Megaptera novaeangliae) [4] | VTOL 1/Splashdrone | Canon PowerShot D30 |
| Photogrammetry of blue whales (Balaenoptera musculus) [18] | VTOL 1/APH-22 | Olympus E-PM2 M.Zuiko 25 mm F1.8 lens |
| Photogrammetry and photo-identification of killer whales (Orcinus orca) [9] | VTOL 1/APH-22 | Olympus E-PM2 M.Zuiko 25 mm F1.8 lens |
| Abundance surveys and photogrammetry of seals in Antarctica [8,48] | VTOL 1/APH-22 | Sony NEX-5, Canon EOS-M, Olympus E-P1; 22 mm or 45 mm lens |
| Abundance surveys of dugongs (Dugong dugon) [15] | LALE 2/ScanEagle | Nikon D90; 35 mm lens |
| Abundance surveys of manatees (Trichechus manatus latirostris) [16] | LASE 3/FoldBat | Canon Elura 2 |
| Photo-identification of bowhead whales (Balaena mysticetus) [7] | LASE 3/TD100-E | Nikon D800; 35 mm lens |
| Abundance surveys of seals in the Bering Sea pack ice [14] | LALE 2/ScanEagle | Nikon D300; 35 mm lens |
| Abundance surveys, photogrammetry, and photo-identification of seals in UK [13] | VTOL 1/Cinestar 6 VTOL 1/Skijib VTOL 1/Vulcan 8 | Sony HDR-CX760 and PJ650 |
| Abundance surveys and photo-identification of Steller sea lions (Eumetopias jubatus) [12] | VTOL 1/APH-22 | Canon EOS M; EF-M f/2 STM 22 mm lens |
| Abundance surveys of grey seals (Halichoerus grypus) [11] | LASE 3/eBee | Canon S110; senseFly LCC Thermomapper |
| Abundance surveys of humpback whales (Megaptera novaeanlgiae) [17] | LALE 2/ScanEagle | Nikon D90; 35 mm lens |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fiori, L.; Doshi, A.; Martinez, E.; Orams, M.B.; Bollard-Breen, B. The Use of Unmanned Aerial Systems in Marine Mammal Research. Remote Sens. 2017, 9, 543. https://doi.org/10.3390/rs9060543
Fiori L, Doshi A, Martinez E, Orams MB, Bollard-Breen B. The Use of Unmanned Aerial Systems in Marine Mammal Research. Remote Sensing. 2017; 9(6):543. https://doi.org/10.3390/rs9060543
Chicago/Turabian StyleFiori, Lorenzo, Ashray Doshi, Emmanuelle Martinez, Mark B. Orams, and Barbara Bollard-Breen. 2017. "The Use of Unmanned Aerial Systems in Marine Mammal Research" Remote Sensing 9, no. 6: 543. https://doi.org/10.3390/rs9060543
APA StyleFiori, L., Doshi, A., Martinez, E., Orams, M. B., & Bollard-Breen, B. (2017). The Use of Unmanned Aerial Systems in Marine Mammal Research. Remote Sensing, 9(6), 543. https://doi.org/10.3390/rs9060543