
Calibrating Satellite-Based Indices of Burn Severity from UAV-Derived Metrics of a Burned Boreal Forest in NWT, Canada


Abstract
:
1. Introduction
2. Materials and Methods
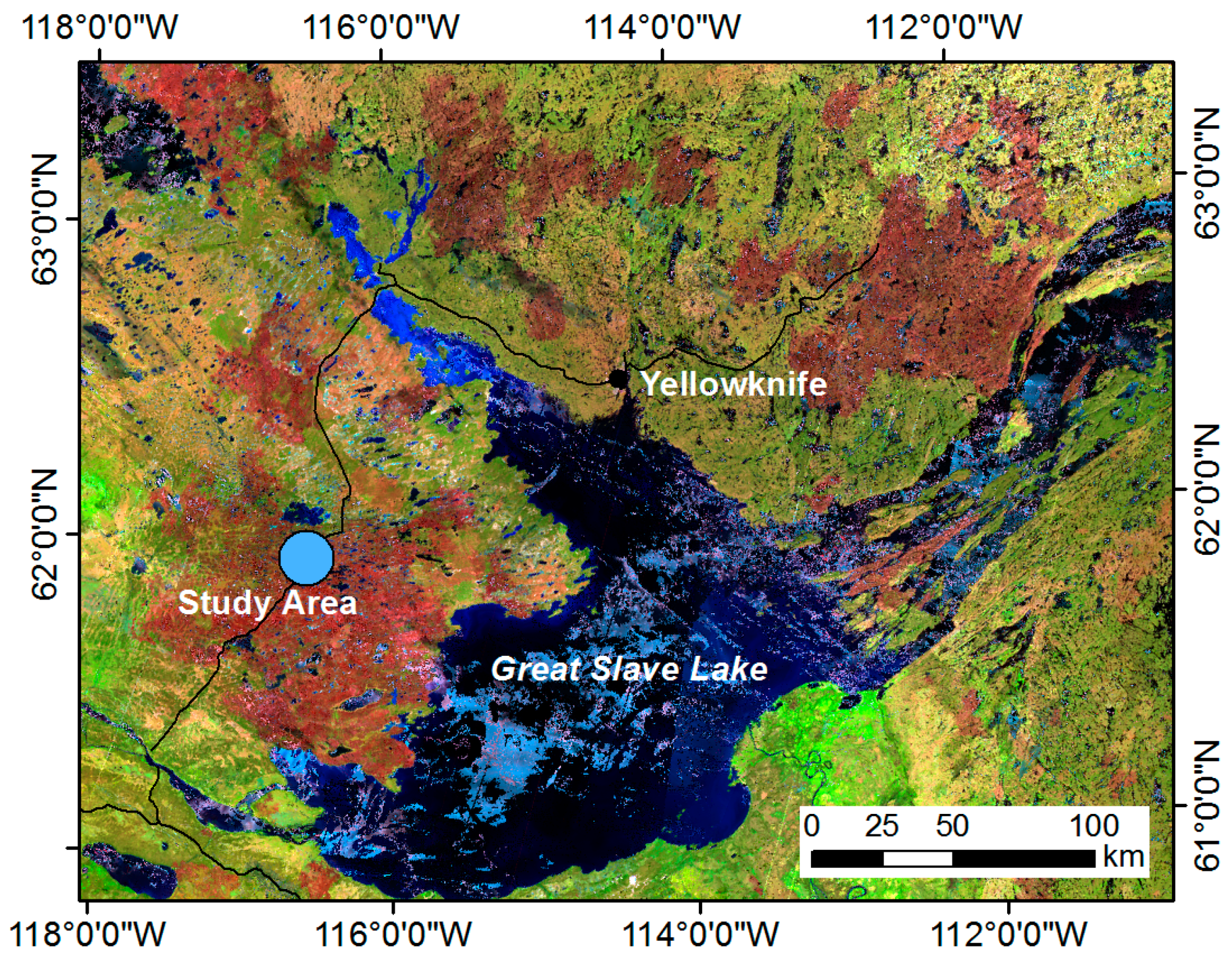
2.1. Study Area and Fires
2.2. UAV Imagery and Processing
2.3. Satellite Imagery and Processing
2.4. Data Analysis
3. Results
4. Discussion
- (1)
- Our surveys were conducted under clear, sunny conditions that caused strong shadows to cover much of the ground in areas with dense residual tree cover. Shadowing could be minimized by conducting surveys in light, overcast conditions.
- (2)
- Surface char was completely obscured in some areas, due to a dense layer of scorched conifer needles that dropped from the above canopy.
- (3)
- We did not validate the accuracy of the tree canopy height model and assumed that it was sufficiently accurate for broadly separating ground-level vegetation and tree crowns that lie above 5 m. For reference, Wallace et al. [52] created UAV/SfM-based canopy height models that could estimate 4.7–16.2 m eucalyptus tree heights, with a root mean square error of 1.3 m.
- (4)
- The binary Jenks classifier, used for separating both green vegetation and shadows, was found to be simple and effective, yet may not be as accurate as more advanced classifiers or those that include a third, less severe vegetation response class for brown/orange scorched canopies.
- (5)
- A rigorous validation of very high resolution, UAV-derived indicators of burn severity is challenging, because of the requirement to collect reference data that is at least as detailed and spatially precise. The approach used in this study for mapping green vegetation and char was to relate photo-interpreted conditions, based on ground and UAV photos, to a georeferenced UAV orthomosaic. However, the validation of more advanced and structural measures of burn severity from UAV photogrammetry will require precisely georeferenced field-based measurements.
- (6)
- We used a consumer-grade RGB camera mounted on a UAV to capture images in JPEG format, that provided simple digital number intensity values. Note that such data have an unknown relationship to scene radiance [53], and would be impacted by any changes in solar illumination during a survey. While we found that such imagery is suitable for separating broad and distinct classes, such as green vegetation and charred surface, more detailed vegetation characterization could benefit from using miniaturized multi- or hyper-spectral instruments that provide additional spectral information, and where radiance is normalized based on incident light sensors. Note, however, that such sensors currently provide coarser pixel resolutions (e.g., 1–2 megapixels) that may make the SfM modeling of a tree structure challenging.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kasischke, E.S.; Turetsky, M.R. Recent changes in the fire regime across the North American boreal region—Spatial and temporal patterns of burning across Canada and Alaska. Geophys. Res. Lett. 2006, 33, L09703. [Google Scholar] [CrossRef]
- Kurz, W.A.; Stinson, G.; Rampley, G.J.; Dymond, C.C.; Neilson, E.T. Risk of natural disturbances makes future contribution of Canada’s forests to the global carbon cycle highly uncertain. Proc. Natl. Acad. Sci. USA 2008, 105, 1551–1555. [Google Scholar] [CrossRef] [PubMed]
- McCullough, D.G.; Werner, R.A.; Neumann, D. Fire and insects in northern and boreal forest ecosystems of North America. Annu. Rev. Entomol. 1998, 43, 107–127. [Google Scholar] [CrossRef] [PubMed]
- Kurz, W.A.; Shaw, C.H.; Boisvenue, C.; Stinson, G.; Metsaranta, J.; Leckie, D.; Dyk, A.; Smyth, C.; Neilson, E.T. Carbon in Canada’s boreal forest—A synthesis. Environ. Rev. 2013, 21, 260–292. [Google Scholar] [CrossRef]
- Amiro, B.D.; Todd, J.B.; Wotton, B.M.; Logan, K.A.; Flannigan, M.D.; Stocks, B.J.; Mason, J.A.; Martell, D.L.; Hirsch, K.G. Direct carbon emissions from Canadian forest fires, 1959–1999. Can. J. For. Res. 2001, 31, 512–525. [Google Scholar] [CrossRef]
- Thomas, D.C.; Barry, S.J.; Alaie, G. Fire-caribou-winter range relationships in northern Canada. Rangifer 1996, 16, 57–67. [Google Scholar] [CrossRef]
- Burn, C.R. The response (1958–1997) of permafrost and near-surface ground temperatures to forest fire, Takhini River Valley, Southern Yukon Territory. Can. J. Earth Sci. 1998, 35, 184–199. [Google Scholar] [CrossRef]
- Amiro, B.D.; Cantin, A.; Flannigan, M.D.; de Groot, W.J. Future emissions from Canadian boreal forest fires. Can. J. For. Res. 2009, 39, 383–395. [Google Scholar] [CrossRef]
- Johnston, M.; Williamson, T.; Munson, A.; Ogden, A.; Moroni, M.; Parsons, R.; Price, D.; Stadt, J. Climate Change and Forest Management in Canada: Impacts, Adaptive Capacity and Adaptation Options; A State of Knowledge Report; Sustainable Forest Management Network: Edmonton, AB, Canada, 2010; p. 54. [Google Scholar]
- Price, D.T.; Alfaro, R.I.; Brown, K.J.; Flannigan, M.D.; Fleming, R.A.; Hogg, E.H.; Girardin, M.P.; Lakusta, T.; Johnston, M.; McKenney, D.W.; et al. Anticipating the consequences of climate change for Canada’s boreal forest ecosystems. Environ. Rev. 2013, 21, 322–365. [Google Scholar] [CrossRef]
- Lentile, L.B.; Holden, Z.A.; Smith, A.M.S.; Falkowski, M.J.; Hudak, A.T.; Morgan, P.; Lewis, S.A.; Gessler, P.E.; Benson, N.C. Remote sensing techniques to assess active fire characteristics and post-fire effects. Int. J. Wildland Fire 2006, 15, 319–345. [Google Scholar] [CrossRef]
- Macdonald, S.E. Effects of partial post-fire salvage havesting on vegetation communities in the boreal mixedwood forest region of northeastern Alberta, Canada. For. Ecol. Manag. 2007, 239, 21–31. [Google Scholar] [CrossRef]
- Johnstone, J.F.; Chapin, F.S., III. Effects of soil burn severity on post-fire tree recruitment in boreal forest. Ecosystems 2006, 9, 14–31. [Google Scholar] [CrossRef]
- Smucker, K.M.; Hutto, R.L.; Steele, B.M. Changes in bird abundance after wildfire: Importance of fire severity and time since fire. Ecol. Appl. 2005, 15, 1535–1549. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Johnstone, J.F. Variation in postfire organic layer thickness in a black spruce forest complex in interior Alaska and its effects on soil temperature and moisture. Can. J. For. Res. 2005, 35, 2164–2177. [Google Scholar] [CrossRef]
- Hall, R.J.; Freeburn, J.T.; de Groot, W.J.; Pritchard, J.M.; Lynham, T.J.; Landry, R. Remote sensing of burn severity: Experience from western Canada boreal fires. Int. J. Wildland Fire 2008, 17, 476–489. [Google Scholar] [CrossRef]
- Boby, L.A.; Schuur, E.A.G.; Mack, M.C.; Verbyla, D.; Johnstone, J.F. Quantifying fire severity, carbon, and nitrogen emissions in Alaska’s boreal forest. Ecol. Appl. 2010, 20, 1633–1647. [Google Scholar] [CrossRef] [PubMed]
- Routledge, R.G. Sampling Methodology for Studying Boreal Postfire Residual Stand Structure with High Resolution Aerial Photography and Field Plots; Forest Research Information Paper No. 169; Ontario Forest Research Institute: Sault Ste. Marie, ON, Canada, 2007. [Google Scholar]
- Lewis, S.A.; Hudak, A.T.; Ottmar, R.D.; Robichaud, P.R.; Lentile, L.B.; Hood, S.M.; Cronan, J.B.; Morgan, P. Using hyperspectral imagery to estimate forest floor consumption from wildfire in boreal forests of Alaska, USA. Int. J. Wildland Fire 2011, 20, 255–271. [Google Scholar] [CrossRef]
- Magnussen, S.; Wulder, M.A. Post-fire canopy height recovery in Canada’s boreal forests using Airborne Laser Scanner (ALS). Remote Sens. 2012, 4, 1600–1616. [Google Scholar] [CrossRef]
- French, N.H.F.; Kasischke, E.S.; Hall, R.J.; Murphy, K.A.; Verbyla, D.L.; Hoy, E.E.; Allen, J.L. Using Landsat data to assess fire and burn severity in the North American boreal forest region: An overview and summary of results. Int. J. Wildland Fire 2008, 17, 443–462. [Google Scholar] [CrossRef]
- Key, C.H.; Benson, N.C. Landscape assessment: Sampling and analysis methods. In FIREMON: Fire Effects Monitoring and Inventory System; Lutes, D.C., Keane, R.E., Caratti, J.F., Key, C.H., Benson, N.C., Sutherland, S., Gangi, L.H., Eds.; General Technical Report 164; USDA Rocky Mountain Research Station: Fort Collins, CO, USA, 2006; pp. LA1–LA51. [Google Scholar]
- Morgan, P.; Keane, R.E.; Dillon, G.K.; Jain, T.B.; Hudak, A.T.; Karau, E.C.; Sikkink, P.G.; Holden, Z.A.; Strand, E.K. Challenges of assessing fire and burn severity using field measures, remote sensing and modelling. Int. J. Wildland Fire 2014, 23, 1045–1060. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Turetsky, M.R.; Ottmar, R.D.; French, N.H.F.; Hoy, E.E.; Kane, E.S. Evaluation of the composite burn index for assessing fire severity in Alaskan black spruce forests. Int. J. Wildland Fire 2008, 17, 515–526. [Google Scholar] [CrossRef]
- Chu, T.; Guo, X. Remote sensing techniques in monitoring post-fire effects and patterns of forest recovery in boreal forest regions: A review. Remote Sens. 2013, 6, 470–520. [Google Scholar] [CrossRef]
- Wing, M.G.; Burnett, J.D.; Sessions, J. Remote sensing and unmanned aerial system technology for monitoring and quantifying forest fire impacts. Int. J. Remote Sens. Appl. 2014, 4, 18. [Google Scholar] [CrossRef]
- Soverel, N.O.; Perrakis, D.D.B.; Coops, N.C. Estimating burn severity from Landsat dNBR and RdNBR indices across western Canada. Remote Sens. Environ. 2010, 114, 1896–1909. [Google Scholar] [CrossRef]
- Boucher, J.; Beaudoin, A.; Hébert, C.; Guindon, L.; Bauce, É. Assessing the potential of the differenced Normalized Burn Ratio (dNBR) for estimating burn severity in eastern Canadian boreal forests. Int. J. Wildland Fire 2016. [Google Scholar] [CrossRef]
- Hoy, E.E.; French, N.H.F.; Turetsky, M.R.; Trigg, S.N.; Kasischke, E.S. Evaluating the potential of Landsat TM/ETM+ imagery for assessing fire severity in Alaskan black spruce forests. Int. J. Wildland Fire 2008, 17, 500–514. [Google Scholar] [CrossRef]
- Murphy, K.A.; Reynolds, J.H.; Koltun, J.M. Evaluating the ability of the differenced Normalized Burn Ratio (dNBR) to predict ecologically significant burn severity in Alaskan boreal forests. Int. J. Wildland Fire 2008, 17, 490–499. [Google Scholar] [CrossRef]
- Verbyla, D.L.; Kasischke, E.S.; Hoy, E.E. Seasonal and topographic effects on estimating fire severity from Landsat TM/ETM+ data. Int. J. Wildland Fire 2008, 17, 527–534. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H. Remote sensing of the environment with small unmanned aircraft systems (UASs), Part 1: A review of progress and challenges. J. Unmanned Veh. Syst. 2014, 2, 69–85. [Google Scholar] [CrossRef]
- Ambrosia, V.G.; Wegener, S.; Zajkowski, T.; Sullivan, D.V.; Buechel, S.; Enomoto, F.; Lobitz, B.; Johan, S.; Brass, J.; Hinkley, E. The Ikhana unmanned airborne system (UAS) western states fire imaging missions: From concept to reality (2006–2010). Geocarto Int. 2011, 26, 85–101. [Google Scholar] [CrossRef]
- Simpson, J.; Wooster, M.; Smith, T.; Trivedi, M.; Vernimmen, R.; Dedi, R.; Shakti, M.; Dinata, Y. Tropical peatland burn depth and combustion heterogeneity assessed using UAV photogrammetry and airborne LiDAR. Remote Sens. 2016, 8, 1000. [Google Scholar] [CrossRef]
- Ecosystem Classification Group. Ecological Regions of the Northwest Territories—Taiga Plains; Department of Environment and Natural Resources, Government of the Northwest Territories: Yellowknife, NT, Canada, 2007.
- Allen, J.L.; Sorbel, B. Assessing the differenced Normalized Burn Ratio’s ability to map burn severity in the boreal forest and tundra ecosystems of Alaska’s national parks. Int. J. Wildland Fire 2008, 17, 463–475. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Hudak, A.T.; Morgan, P.; Bobbitt, M.J.; Smith, A.M.S.; Lewis, S.A.; Lentile, L.B.; Robichaud, P.R.; Clark, J.T.; McKinley, R.A. The relationship of multispectral satellite imagery to immediate fire effects. Fire Ecol. 2007, 3, 64–90. [Google Scholar] [CrossRef]
- Fraser, R.H.; Olthof, I.; Lantz, T.C.; Schmitt, C. UAV photogrammetry for mapping vegetation in the low-Arctic. Arct. Sci. 2016, 2, 79–102. [Google Scholar] [CrossRef]
- Chander, G.; Markham, B.L.; Helder, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Remer, L.A. Detection of forests using mid-IR reflectance: An application for aerosol studies. IEEE Trans. Geosci. Remote Sens. 1994, 32, 672–683. [Google Scholar] [CrossRef]
- Smith, A.M.S.; Wooster, M.J.; Drake, N.A.; Dipotso, F.M.; Falkowski, M.J.; Hudak, A.T. Testing the potential of multi-spectral remote sensing for retrospectively estimating fire severity in African Savannahs. Remote Sens. Environ. 2005, 97, 92–115. [Google Scholar] [CrossRef]
- Hugenholtz, C.; Brown, O.; Walker, J.; Barchyn, T.; Nesbit, P.; Kucharczyk, M.; Myshak, S. Spatial accuracy of UAV-derived orthoimagery and topography: Comparing photogrammetric models processed with direct geo-referencing and ground control points. Geomatica 2016, 70, 21–30. [Google Scholar] [CrossRef]
- Conover, W.J. Practical Nonparametric Statistics, 3rd ed.; Wiley Series in Probability and Statistics; John Wiley & Sons, Inc.: New York, NY, USA, 1999. [Google Scholar]
- Fraser, R.; Li, Z. Estimating fire-related parameters in boreal forest using spot vegetation. Remote Sens. Environ. 2002, 82, 95–110. [Google Scholar] [CrossRef]
- Epting, J.; Verbyla, D.; Sorbel, B. Evaluation of remotely sensed indices for assessing burn severity in interior Alaska using Landsat TM and ETM+. Remote Sens. Environ. 2005, 96, 328–339. [Google Scholar] [CrossRef]
- Escuin, S.; Navarro, R.; Fernández, P. Fire severity assessment by using NBR (Normalized Burn Ratio) and NDVI (Normalized Difference Vegetation Index) derived from LANDSAT TM/ETM images. Int. J. Remote Sens. 2008, 29, 1053–1073. [Google Scholar] [CrossRef]
- McCarley, T.R.; Kolden, C.A.; Vaillant, N.M.; Hudak, A.T.; Smith, A.M.S.; Wing, B.M.; Kellogg, B.S.; Kreitler, J. Multi-temporal LiDAR and Landsat quantification of fire-induced changes to forest structure. Remote Sens. Environ. 2017, 191, 419–432. [Google Scholar] [CrossRef]
- Hudak, A.T.; Ottmar, R.D.; Vihnanek, R.E.; Brewer, N.W.; Smith, A.M.S.; Morgan, P. The relationship of post-fire white ash cover to surface fuel consumption. Int. J. Wildland Fire 2013, 22, 780–785. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.L.; French, N.H.F.; Endres, S.; Jenkins, L.; Battaglia, M.; Serocki, E.; Billmire, M. ABoVE: Burn Severity, Fire Progression, Landcover and Field Data, NWT, Canada, 2014; ORNL DAAC: Oak Ridge, TN, USA, 2016.
- Hély, C.; Flannigan, M.; Bergeron, Y. Modeling tree mortality following wildfire in the Southeastern Canadian mixed-wood boreal forest. For. Sci. 2003, 49, 566–576. [Google Scholar]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Akkaynak, D.; Treibitz, T.; Xiao, B.; Gürkan, U.A.; Allen, J.J.; Demirci, U.; Hanlon, R.T. Use of commercial off-the-shelf digital cameras for scientific data acquisition and scene-specific color calibration. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2014, 31, 312–321. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey ID | Surveyed Area (ha) | # UAV Photos | # 30 m Landsat Pixels | # Forest Inventory Units | Dominant Tree Species | # CBI Plots (2015, 2016) |
|---|---|---|---|---|---|---|
| 1 | 49.7 | 1401 | 462 | 12 | Sw, Sb, A | 3, 24 |
| 2 | 9.3 | 285 | 66 | 2 | Pj | 1, 7 |
| 3 | 10.1 | 280 | 77 | 5 | Pj, Sw, Sb | 1, 3 |
| Burn Severity Indices and Attributes | Channel Combination/Description |
|---|---|
| UAV spectral indices | |
| Excess Greenness (ExG) | 2G − R − B |
| Normalized Greenness (NormG) | G/(R + G + B) |
| Normalized Green-Red Ratio (NormG-R) | (G − R)/(G + R) |
| Brightness | R + G + B |
| Maximum RGB Difference (MaxDiff) | Max(|B − G|, |B − R|, |R − G|) |
| Char Index (CI) | Brightness + (MaxDiff × 15) |
| UAV burn severity indicators | |
| Green Vegetation | From thresholding ExG index |
| Green Crown Vegetation | Green Vegetation above 5 m |
| Charred Surface | From thresholding Char Index |
| Landsat spectral indices | |
| Normalized Burn Ratio post-fire (post-NBR) | (NIR − SWIR2)/(NIR + SWIR2) |
| Differenced NBR (dNBR) | NBRpreburn − NBRpostburn |
| Landsat Severity Index (X) | UAV Measure of Severity (Y) | p-Values |
|---|---|---|
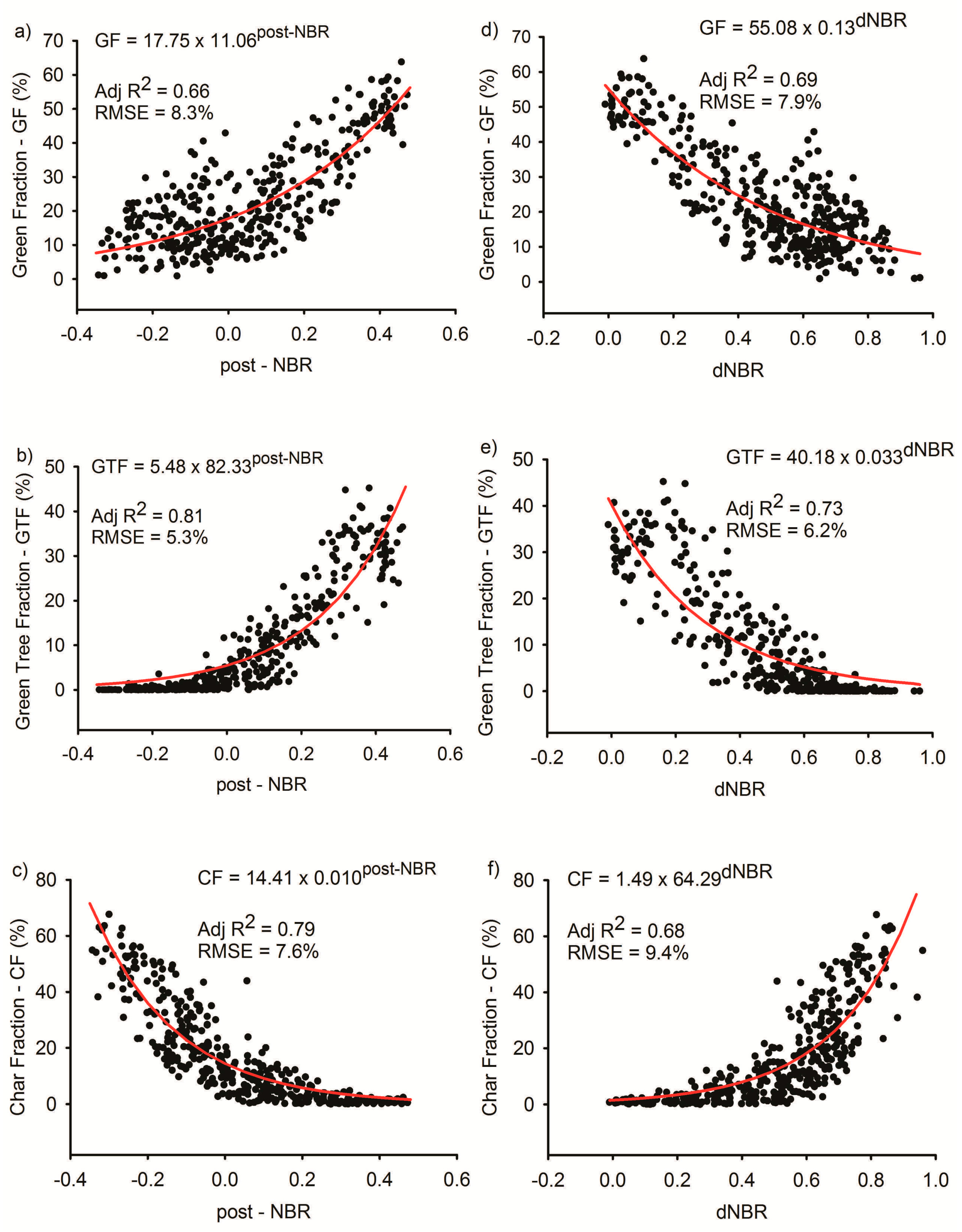
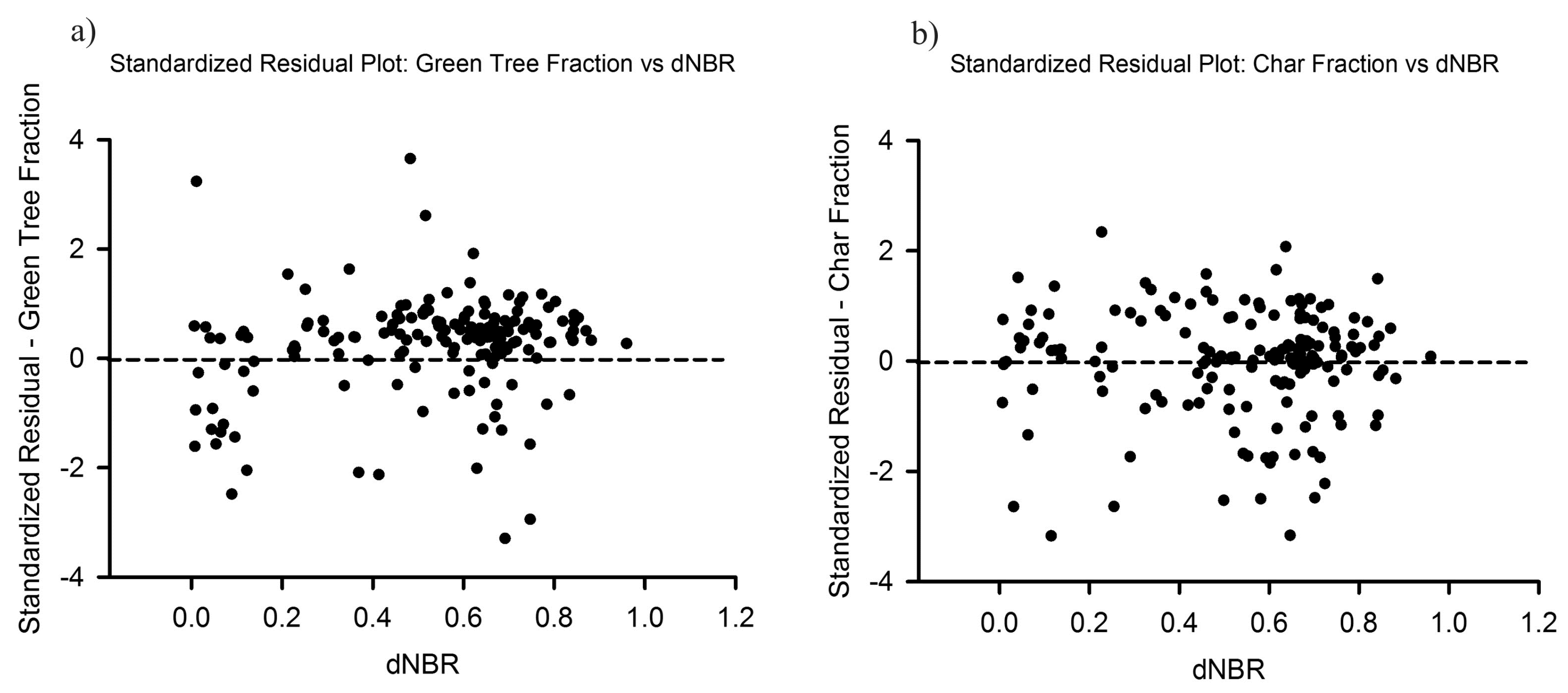
| post-NBR | Green Fraction | 0.74 |
| Green Tree Fraction | 0.00 | |
| Char Fraction | 0.29 | |
| dNBR | Green Fraction | 0.93 |
| Green Tree Fraction | 0.00 | |
| Char Fraction | 0.28 |
| Overall CBI Predictor | Non-Linear Model Y = Overall CBI | Adj R2 | RMSE |
|---|---|---|---|
| Landsat indices | |||
| post-NBR | Ln (9.47–20.74 post-NBR) | 0.59 | 0.60 |
| dNBR | 3.20 dNBR 0.63 | 0.53 | 0.64 |
| UAV indices | |||
| Green Fraction (GF) | 2.60–1.16 GF2 | 0.52 | 0.58 |
| Green Tree Fraction (GTF) | 2.70 × 0.96GTF | 0.60 | 0.54 |
| Char Fraction (CF) | Ln (3.81–0.29 post-NBR) | 0.36 | 0.67 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fraser, R.H.; Van der Sluijs, J.; Hall, R.J. Calibrating Satellite-Based Indices of Burn Severity from UAV-Derived Metrics of a Burned Boreal Forest in NWT, Canada. Remote Sens. 2017, 9, 279. https://doi.org/10.3390/rs9030279
Fraser RH, Van der Sluijs J, Hall RJ. Calibrating Satellite-Based Indices of Burn Severity from UAV-Derived Metrics of a Burned Boreal Forest in NWT, Canada. Remote Sensing. 2017; 9(3):279. https://doi.org/10.3390/rs9030279
Chicago/Turabian StyleFraser, Robert H., Jurjen Van der Sluijs, and Ronald J. Hall. 2017. "Calibrating Satellite-Based Indices of Burn Severity from UAV-Derived Metrics of a Burned Boreal Forest in NWT, Canada" Remote Sensing 9, no. 3: 279. https://doi.org/10.3390/rs9030279
APA StyleFraser, R. H., Van der Sluijs, J., & Hall, R. J. (2017). Calibrating Satellite-Based Indices of Burn Severity from UAV-Derived Metrics of a Burned Boreal Forest in NWT, Canada. Remote Sensing, 9(3), 279. https://doi.org/10.3390/rs9030279