Construction of Multi-Year Time-Series Profiles of Suspended Particulate Inorganic Matter Concentrations Using Machine Learning Approach

 ,
, 

 , ,
, ,
Abstract

1. Introduction
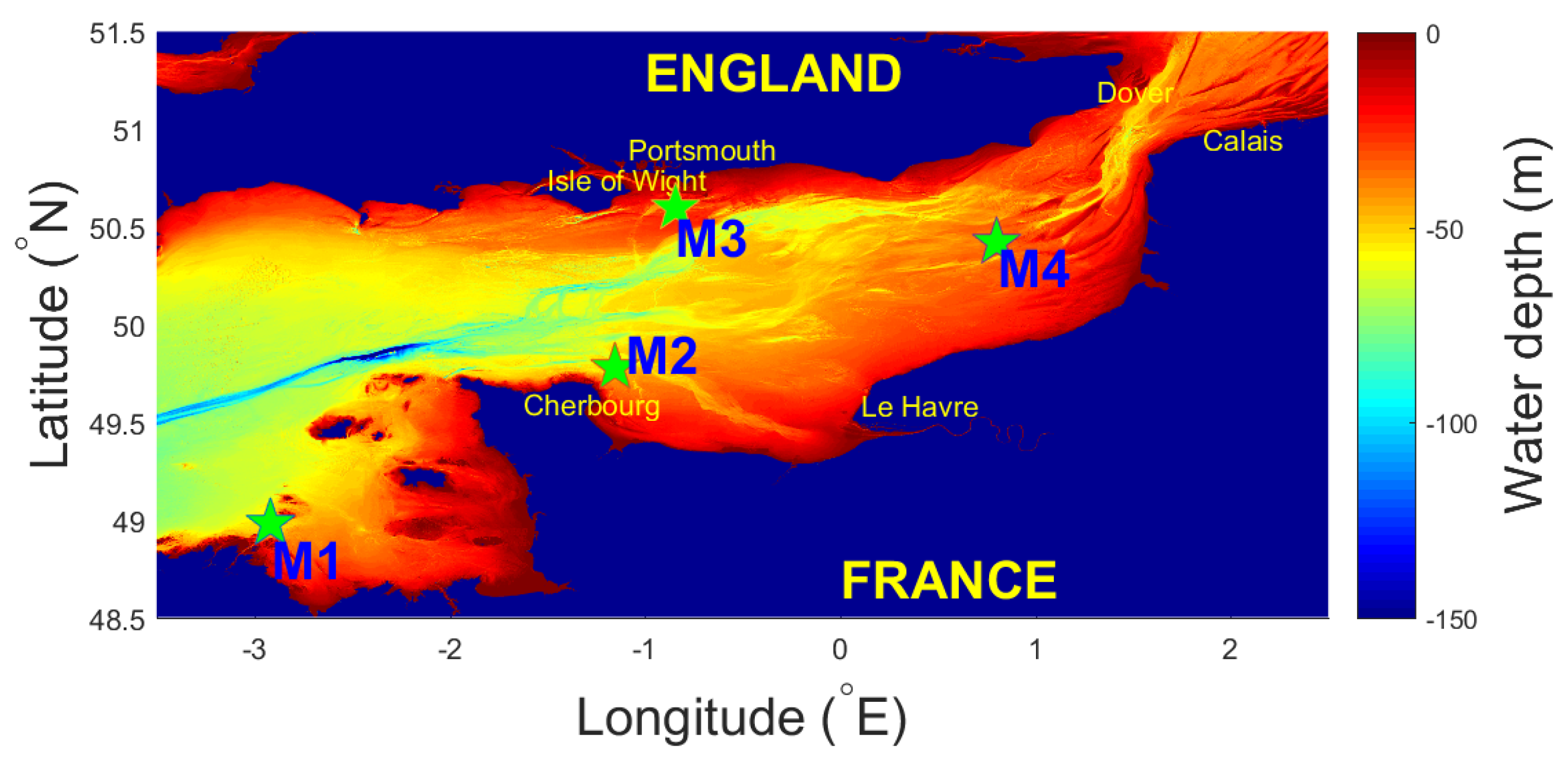
2. Study Area
3. Data and Methodology
3.1. Hidden Data
3.2. Observable Data
3.2.1. Significant Wave Height ()
3.2.2. Barotropic Currents
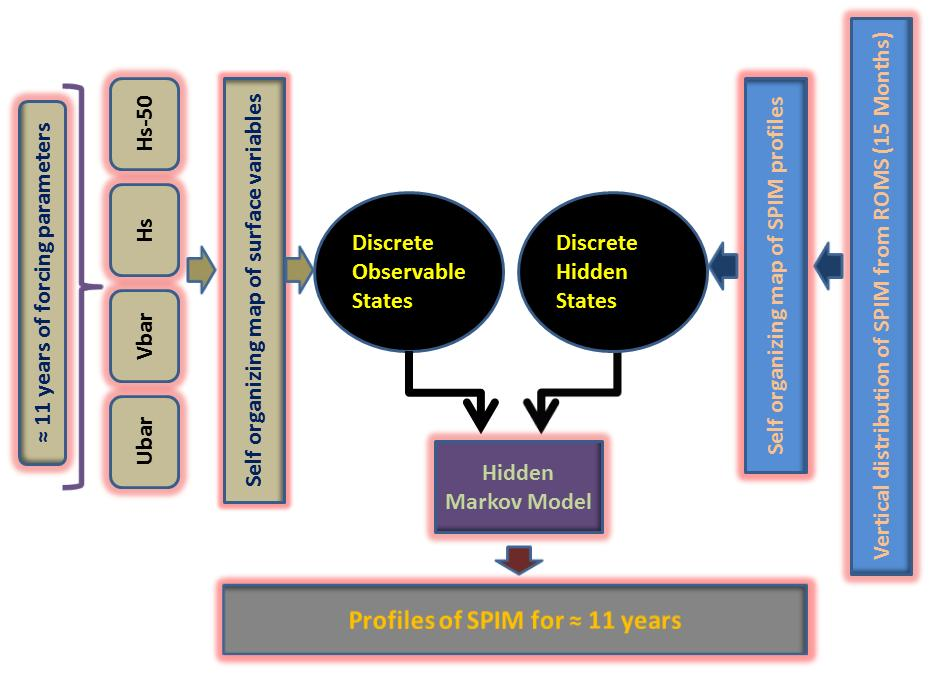
3.3. Self-Organizing Maps
3.4. Hidden Markov Model
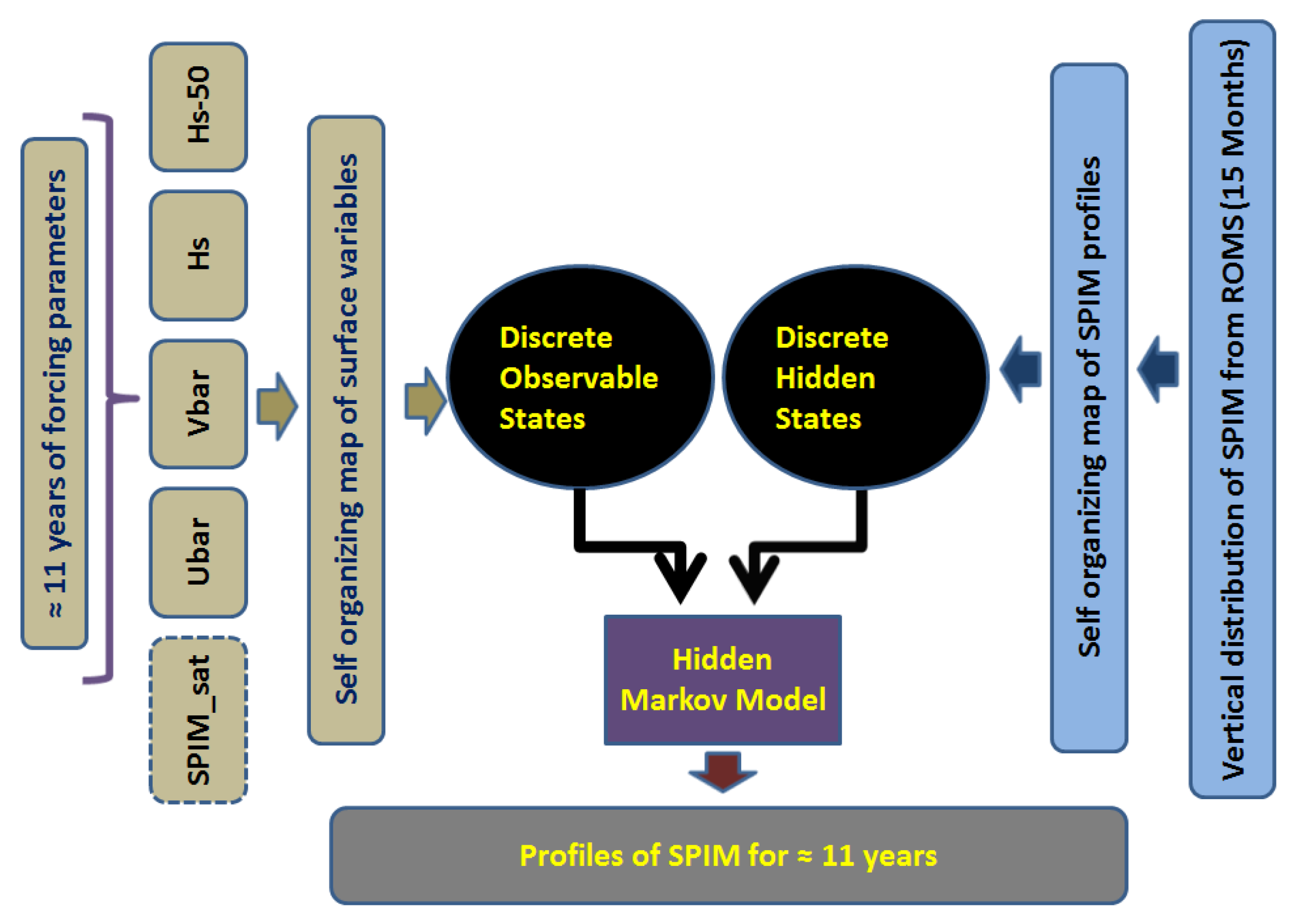
3.5. Satellite Data
4. Results and Discussion
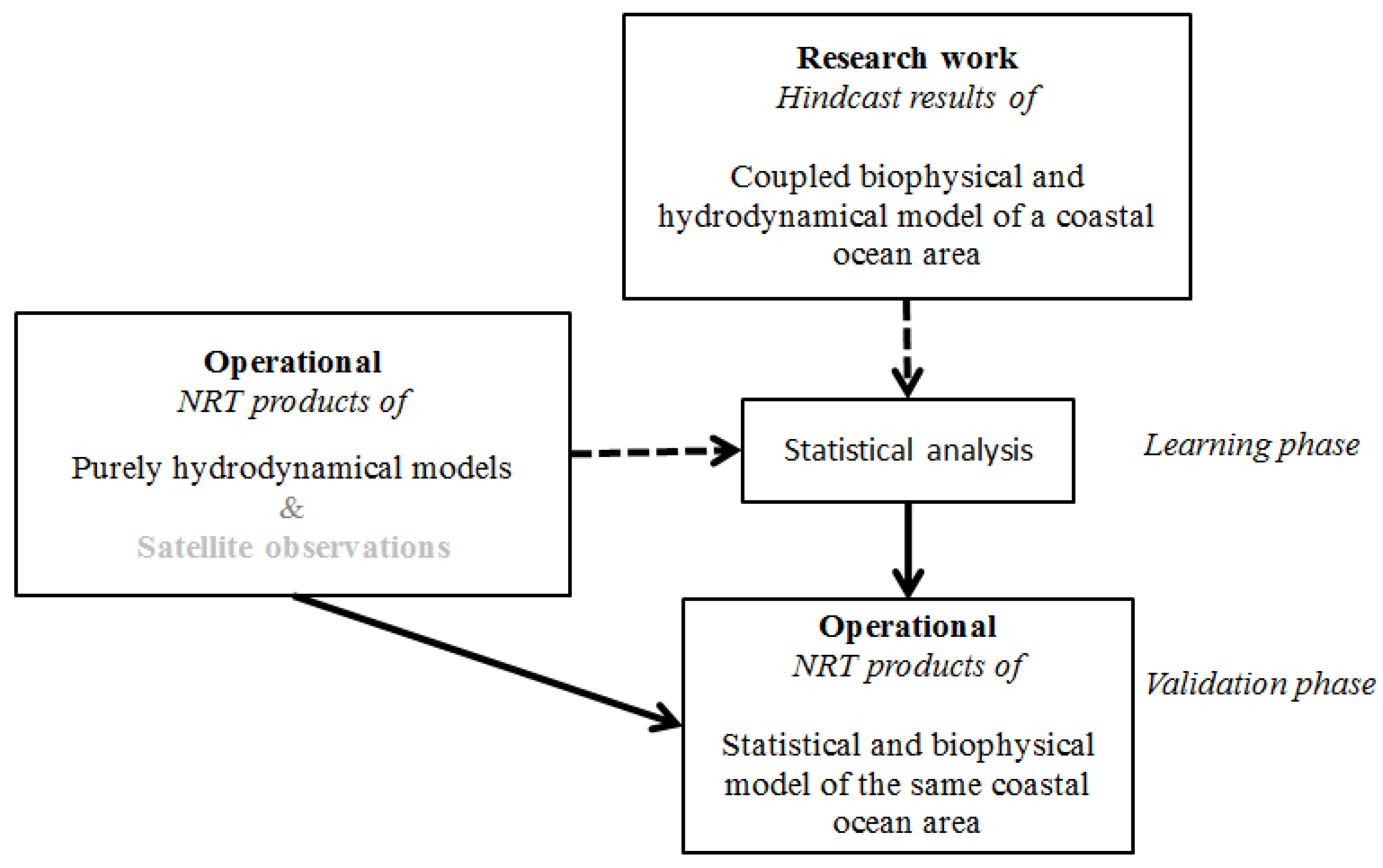
4.1. Output from Learning Phase
4.2. Output from Out-of-Learning Phase
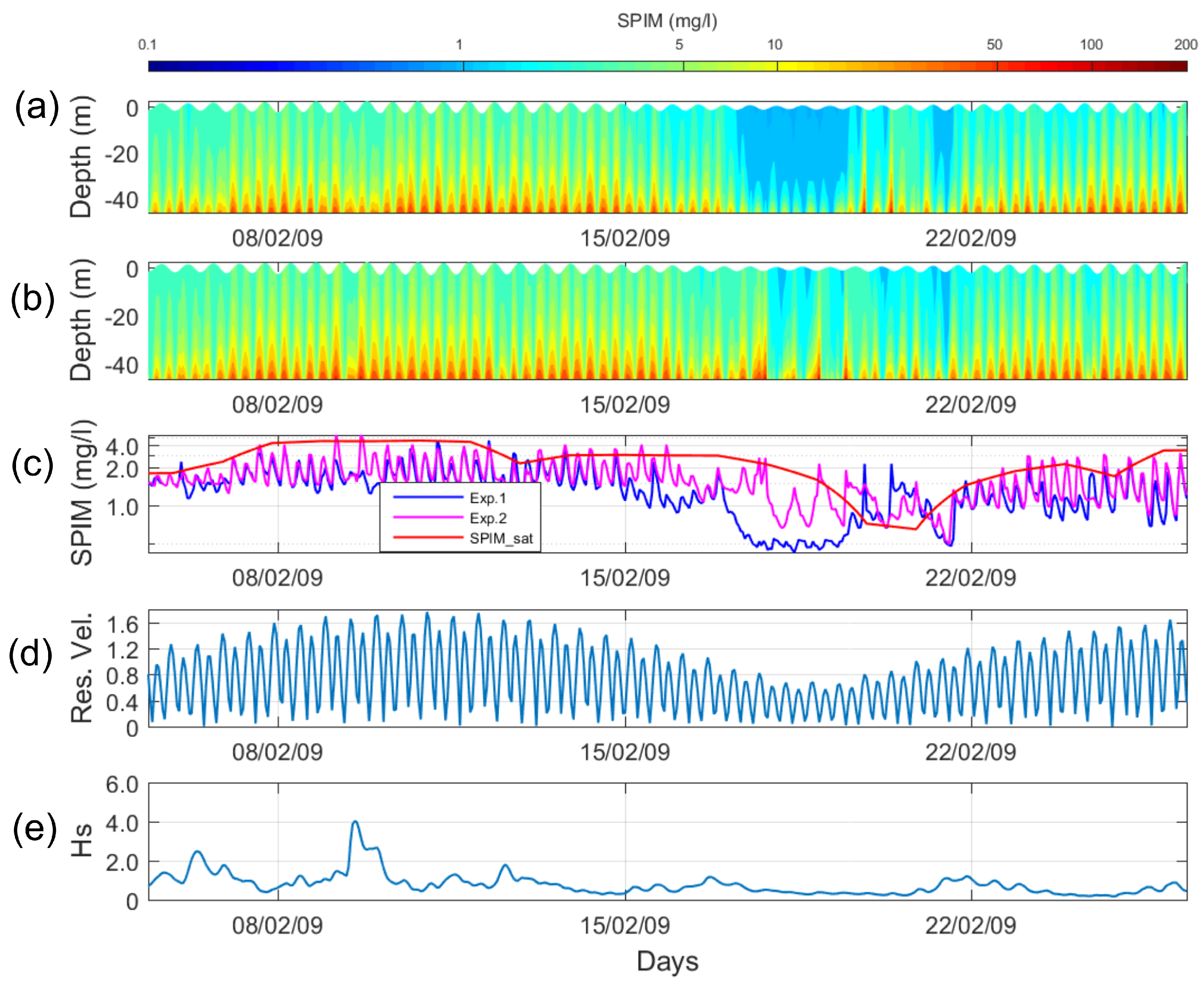
4.2.1. Experiment 1
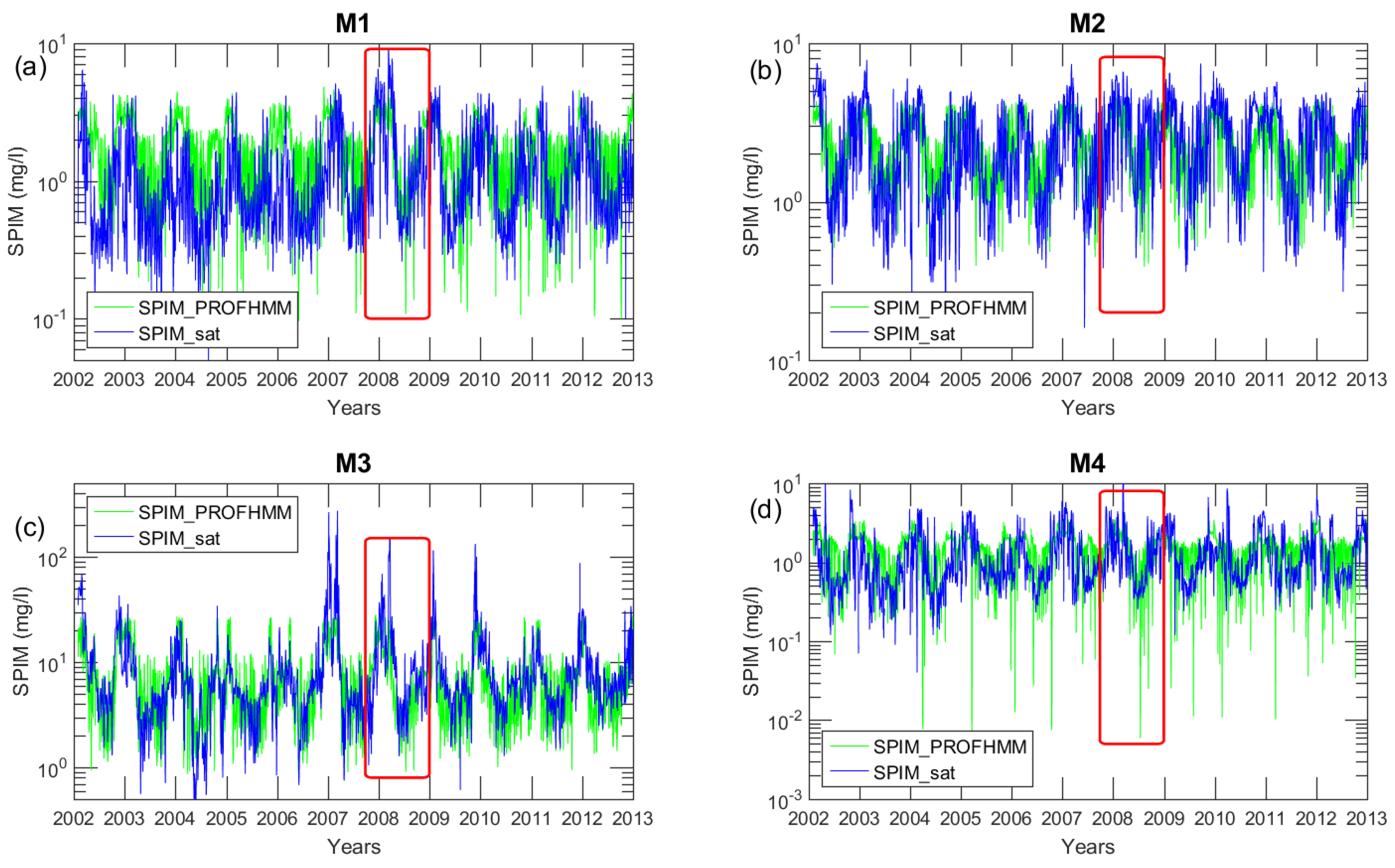
Time Series of Surface SPIM
- The satellite algorithm overestimates the SPIM concentration when finer particles dominate the suspension during storms [33].
- The kriging interpolation of satellite images becomes imprecise during storms because of the high cloud coverage [45].
- The assumptions in the ROMS model (non-cohesive particles, settling velocity, critical shear stress, etc.) are partially valid [33].
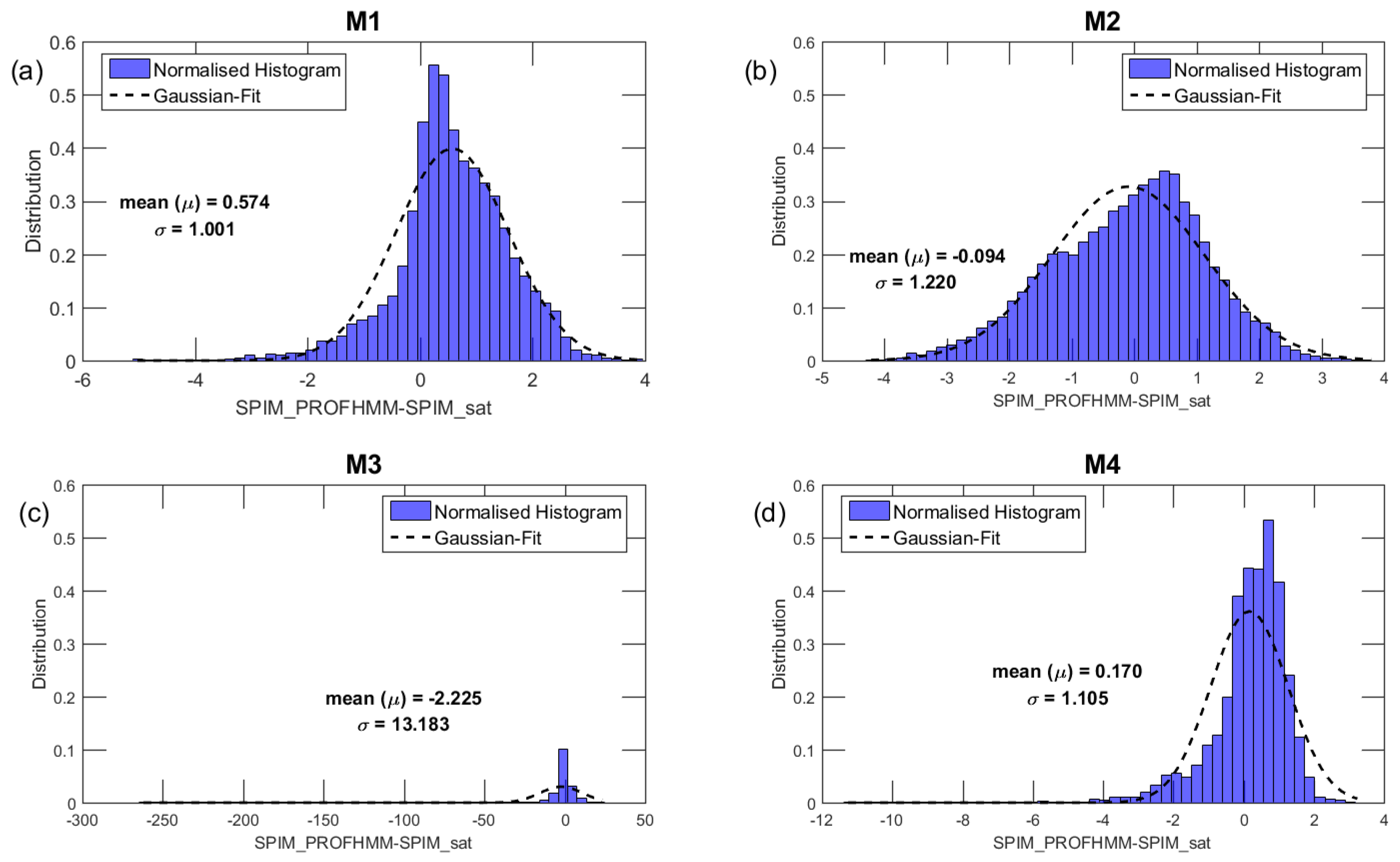
Error Distribution of Surface SPIM
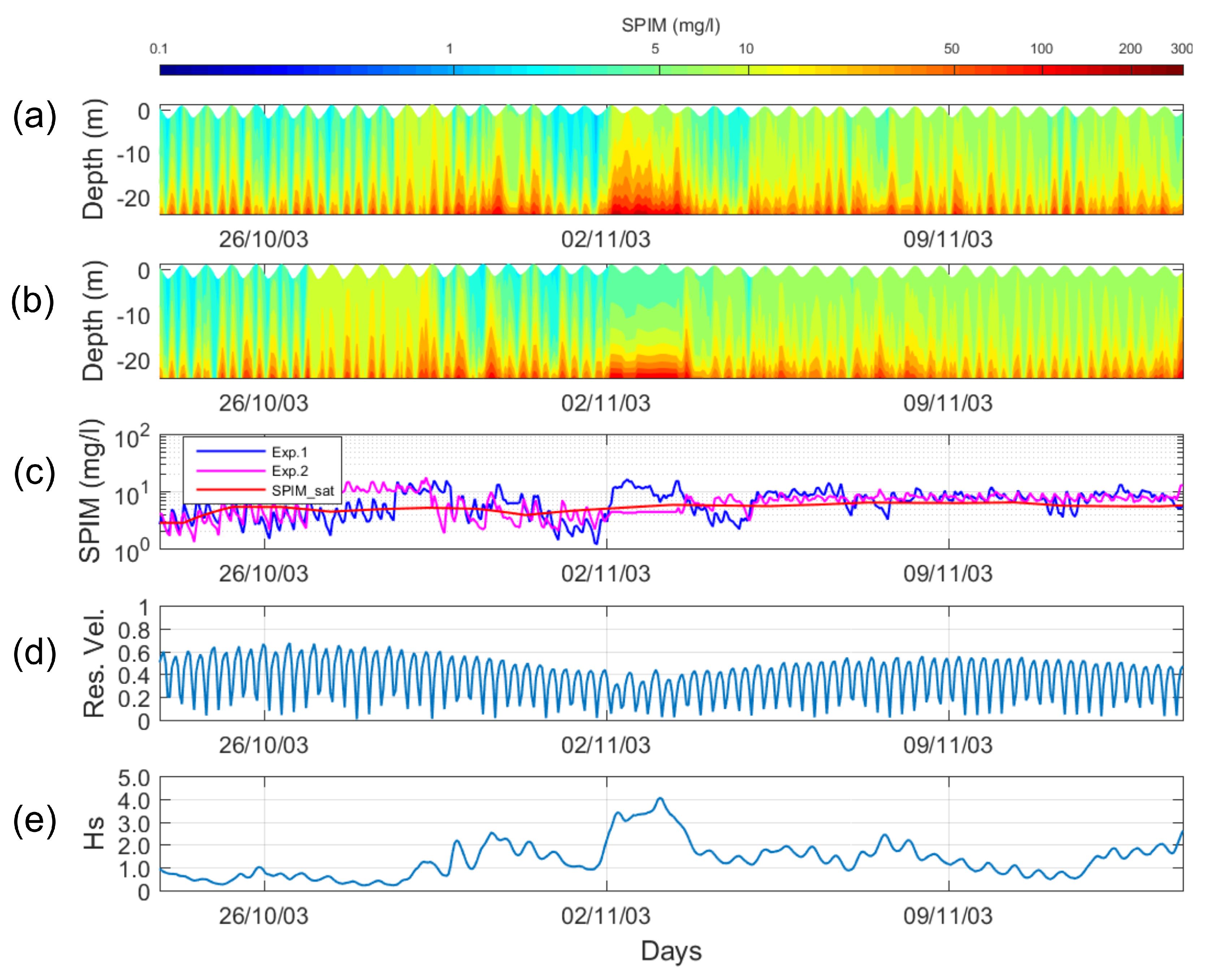
4.2.2. Experiment 2
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SPM | Suspended particulate matter |
| SOMs | Self-organizing maps |
| HMM | Hidden Markov model |
| SPIM | Suspended particulate inorganic matter |
| ROMS | Regional Ocean Modeling System |
| Normalized root-mean-square error | |
| WW3 | Wavewatch III |
| Root-mean-square error | |
| NAP | Non-algal particles |
References
- Zaneveld, J.R.V.; Pegau, W.S. Robust underwater visibility parameter. Opt. Express 2003, 11, 2997–3009. [Google Scholar] [CrossRef] [PubMed]
- Lee, Z.; Shang, S.; Hu, C.; Du, K.; Weidemann, A.; Hou, W.; Lin, J.; Lin, G. Secchi disk depth: A new theory and mechanistic model for underwater visibility. Remote Sens. Environ. 2015, 169, 139–149. [Google Scholar] [CrossRef]
- Sahoo, S.; Jha, M.K. Pattern recognition in lithology classification: Modeling using neural networks, self-organizing maps and genetic algorithms. Hydrogeol. J. 2017, 25, 311–330. [Google Scholar] [CrossRef]
- Diesing, M.; Kroger, S.; Parker, R.; Jenkins, C.; Mason, C.; Weston, K. Predicting the standing stock of organic carbon in surface sediments of the North–West European continental shelf. Biogeochemistry 2017, 135, 183–200. [Google Scholar] [CrossRef]
- Lguensat, R.; Viet, P.H.; Sun, M.; Chen, G.; Fenglin, T.; Chapron, B.; Fablet, R. Data-Driven Interpolation of Sea Level Anomalies Using Analog Data Assimilation. Technical Report. 2017. Available online: https://hal.archives-ouvertes.fr/hal-01609851 (accessed on 22 September 2017).
- Fablet, R.; Viet, P.H.; Lguensat, R. Data-driven Models for the Spatio-Temporal Interpolation of satellite-derived SST Fields. IEEE Trans. Comput. Imaging 2017, 3, 647–657. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, F.; Ding, J. Evaluation of water quality based on a machine learning algorithm and water quality index for the Ebinur Lake Watershed, China. Sci. Rep. 2017, 7, 12858. [Google Scholar] [CrossRef] [PubMed]
- Wattelez, G.; Dupouy, C.; Lefevre, J.; Ouillon, S.; Fernandez, J.M.; Juillot, F. Application of the Support Vector Regression Method for Turbidity Assessment with MODIS on a Shallow Coral Reef Lagoon (Voh-Kone-Pouembout, New Caledonia). Water 2017, 9, 737. [Google Scholar] [CrossRef]
- Le Traon, P.Y.; Antoine, D.; Bentamy, A.; Bonekamp, H.; Breivik, L.A.; Chapron, B.; Corlett, G.; Dibarboure, G.; DiGiacomo, P.; Donlon, C.; et al. Use of satellite observations for operational oceanography: Recent achievements and future prospects. J. Oper. Oceanogr. 2015, 8 (Suppl. S1), s12–s27. [Google Scholar] [CrossRef]
- She, J.; Allen, I.; Buch, E.; Crise, A.; Johannessen, J.A.; Le Traon, P.-Y.; Lips, U.; Nolan, G.; Pinardi, N.; Reißmann, J.H.; et al. Developing European operational oceanography for Blue Growth, climate change adaptation and mitigation, and ecosystem-based management. Ocean Sci. 2016, 12, 953–976. [Google Scholar] [CrossRef]
- Ban, Y.; Marullo, S.; Eklundh, L. European Remote Sensing: Progress, challenges, and opportunities. Int. J. Remote Sens. 2017, 38, 1759–1764. [Google Scholar] [CrossRef]
- McCarthy, M.J.; Colna, K.E.; El-Mezayen, M.M.; Laureano-Rosario, A.E.; Méndez-Lázaro, P.; Otis, D.B.; Toro-Farmer, G.; Vega-Rodriguez, M.; Muller-Karger, F.E. Satellite Remote Sensing for Coastal Management: A Review of Successful Applications. Environ. Manag. 2017, 60, 323–339. [Google Scholar] [CrossRef] [PubMed]
- Sasse, T.P.; McNeil, B.I.; Abramowitz, G. A novel method for diagnosing seasonal to inter-annual surface ocean carbon dynamics from bottle data using neural networks. Biogeosciences 2013, 10, 4319. [Google Scholar] [CrossRef]
- Parard, G.; Charantonis, A.A.; Rutgerson, A. Remote sensing algorithm for sea surface CO2 in the Baltic Sea. Biogeosci. Discuss. 2014, 11, 12255–12294. [Google Scholar] [CrossRef]
- Jang, E.; Im, J.; Park, G.H.; Park, Y.G. Estimation of fugacity of carbon dioxide in the East Sea using in situ measurements and Geostationary Ocean Color Imager satellite data. Remote Sens. 2017, 9, 821. [Google Scholar] [CrossRef]
- Saulquin, B.; Fablet, R.; Ailliot, P.; Mercier, G.; Doxaran, D.; Mangin, A.; d’Andon, O.H.F. Characterization of time-varying regimes in remote sensing time series: Application to the forecasting of satellite-derived suspended matter concentrations. IEEE J. STARS 2015, 8, 406–417. [Google Scholar] [CrossRef]
- Chang, N.B.; Bai, K.; Chen, C.F. Integrating multisensor satellite data merging and image reconstruction in support of machine learning for better water quality management. J. Environ. Manag. 2017, 201, 227–240. [Google Scholar] [CrossRef] [PubMed]
- Blondeau-Patissier, D.; Gower, J.F.; Dekker, A.G.; Phinn, S.R.; Brando, V.E. A review of ocean color remote sensing methods and statistical techniques for the detection, mapping and analysis of phytoplankton blooms in coastal and open oceans. Prog. Oceanogr. 2014, 123, 123–144. [Google Scholar] [CrossRef]
- Charantonis, A.A.; Badran, F.; Thiria, S. Retrieving the evolution of vertical profiles of chlorophyll-a from satellite observations, by using hidden Markov models and self-organizing maps. Remote Sens. Environ. 2015, 163, 229–239. [Google Scholar] [CrossRef]
- Krasnopolsky, V.; Nadiga, S.; Mehra, A.; Bayler, E.; Behringer, D. Neural networks technique for filling gaps in satellite measurements: Application to ocean color observations. Comput. Intell. Neurosci. 2016, 2016, 29. [Google Scholar] [CrossRef] [PubMed]
- Kwon, Y.S.; Jang, E.; Im, J.; Baek, S.H.; Park, Y.; Cho, K.H. Developing data-driven models for quantifying Cochlodinium polykrikoides using the Geostationary Ocean Color Imager (GOCI). Int. J. Remote Sens. 2018, 39, 68–83. [Google Scholar] [CrossRef]
- Gokaraju, B.; Durbha, S.S.; King, R.L.; Younan, N.H. A machine learning based spatio-temporal data mining approach for detection of harmful algal blooms in the Gulf of Mexico. IEEE J. STARS 2011, 4, 710–720. [Google Scholar] [CrossRef]
- Vilas, L.G.; Spyrakos, E.; Palenzuela, J.M.T.; Pazos, Y. Support Vector Machine-based method for predicting Pseudo-nitzschia spp. blooms in coastal waters (Galician rias, NW Spain). Prog. Oceanogr. 2014, 124, 66–77. [Google Scholar] [CrossRef]
- Li, Z.; Cassar, N. Satellite estimates of net community production based on O2/Ar observations and comparison to other estimates. Glob. Biogeochem. Cycle 2016, 30, 735–752. [Google Scholar] [CrossRef]
- Pearce, J.; Commodore, A.; Neelon, B.; Boaz, R.; Bozigar, M.; Wilson, S.; Svendsen, E. A novel approach for characterizing neighborhood-level trends in particulate matter using concentration and size fraction distributions: A case study in Charleston, SC. Air Qual. Atmos. Health 2017, 1–12. [Google Scholar] [CrossRef]
- Guillou, N.; Rivier, A.; Gohin, F.; Chapalain, G. Modeling Near-Surface Suspended Sediment Concentration in the English Channel. J. Mar. Sci. Eng. 2015, 3, 193–215. [Google Scholar] [CrossRef]
- Desprez, M. Physical and biological impact of marine aggregate extraction along the French coast of the Eastern English Channel:short-and long-term post-dredging restoration. ICES J. Mar. Sci. 2000, 57, 1428–1438. [Google Scholar] [CrossRef]
- Seuront, L.; Schmitt, F.G. Multiscaling statistical procedures for the exploration of biophysical couplings in intermittent turbulence.PartII.Applications. Deep Sea Res. II 2005, 52, 1325–1343. [Google Scholar] [CrossRef]
- Korotenko, K.A.; Sentchev, A.V.; Schmitt, F.G. Effect of variable winds on current structure and Reynolds stresses in a tidal flow: Analysis of experimental data in the eastern English Channel. Ocean Sci. 2012, 8, 1025–1040. [Google Scholar] [CrossRef]
- Renosh, P.R.; Schmitt, F.G.; Loisel, H.; Sentchev, A.; Mériaux, X. High frequency variability of particle size distribution and its dependency on turbulence over the sea bottom during re-suspension processes. Cont. Shelf Res. 2014, 77, 51–60. [Google Scholar] [CrossRef]
- Renosh, P.R.; Schmitt, F.G.; Loisel, H. Intermittent particle dynamics in marine coastal waters. Nonlinear Process. Geophys. 2015, 22, 633–643. [Google Scholar] [CrossRef]
- Velegrakis, A.F.; Michel, D.; Collins, M.B.; Lafite, R.; Oikonomou, E.K.; Dupont, J.P.; Bishop, C. Sources, sinks and resuspension of suspended particulate matter in the eastern English Channel. Cont. Shelf Res. 1999, 19, 1933–1957. [Google Scholar] [CrossRef]
- Guillou, N.; Rivier, A.; Chapalain, G.; Gohin, F. The impact of tides and waves on near-surface suspended sediment concentrations in the English Channel. Oceanologia 2017, 59, 28–36. [Google Scholar] [CrossRef]
- Rivier, A.; Gohin, F.; Bryére, P.; Petus, C.; Guillou, N.; Chapalain, G. Observed vs. predicted variability in non-algal suspended particulate matter concentration in the English Channel in relation to tides and waves. Geo-Mar. Lett. 2012, 32, 139–151. [Google Scholar] [CrossRef]
- Biscara, L.; Schmitt, T.; Corréard, S.; Creach, R. Modèles numériques de bathymétrie pour la prévision Hydrodynamique du dispositif vigilance vagues-submersions. In Proceedings of the Actes des XIIIèmes Journées Nationales Génie Côtier—Génie Civil, Dunkerque, France, 2–4 July 2014; Volume 155, pp. 2–4. [Google Scholar]
- Kohonen, T. The self-organizing map. Proc. IEEE 1990, 78, 1464–1480. [Google Scholar] [CrossRef]
- Viterbi, A. Error bounds for convolutional codes and an asymptotically optimum decoding algorithm. IEEE Trans. Inf. Theory 1967, 13, 260–269. [Google Scholar] [CrossRef]
- Haigh, I.; Nicholls, R.; Wells, N. Rising sea levels in the English Channel 1900 to 2100. Proc. Inst. Civil Eng. Mar. Eng. 2010, 164, 81–92. [Google Scholar] [CrossRef]
- Wadey, M.P.; Nicholls, R.J.; Haigh, I. Understanding a coastal flood event: The 10th March 2008 storm surge event in the Solent, UK. Nat. Hazards 2013, 67, 829–854. [Google Scholar] [CrossRef]
- Soulsby, R.L.; Hamm, L.; Klopman, G.; Myrhaug, D.; Simons, R.R.; Thomas, G.P. Wave-current interaction within and outside the bottom boundary layer. Coast. Eng. 1993, 21, 41–69. [Google Scholar] [CrossRef]
- Roland, A.; Cucco, A.; Ferrarin, C.; Hsu, T.W.; Liau, J.M.; Ou, S.H.; Umgiesser, G.; Zanke, U. On the development and verification of 2-D coupled wave-current model on unstructured meshes. J. Mar. Syst. 2009, 78, S244–S254. [Google Scholar]
- Levier, B.; Benkiran, M.; Reffray, G.; Sotillo, M. IBIRYS: A Regional High Resolution Reanalysis (Physical and Biogeochemical) over the European North East Shelf; EGU: München, Germany, 2014. [Google Scholar]
- Madec, G. NEMO Ocean General Circulation Model Reference Manuel; Internal Report; LODYC/IPSL: Paris, France, 2008. [Google Scholar]
- Sotillo, M.G.; Cailleau, S.; Lorente, P.; Levier, B.; Aznar, R.; Reffray, G.; AmoBaladrón, A.; Chanut, J.; Benkiran, M.; Alvarez-Fanjul, E. The MyOcean IBI Ocean Forecast and Reanalysis Systems: Operational products and roadmap to the future Copernicus Service. J. Oper. Oceanogr. 2008, 8, 63–79. [Google Scholar] [CrossRef]
- Gohin, F.; Loyer, S.; Lunven, M.; Labry, C.; Froidefond, J.M.; Delmas, D.; Huret, M.; Herbland, A. Satellite-derived parameters for biological modelling in coastal waters: Illustration over the eastern continental shelf of the Bay of Biscay. Remote Sens. Environ. 2005, 95, 29–46. [Google Scholar] [CrossRef]
- Gohin, F. Annual cycles of chlorophyll-a, non-algal suspended particulate matter, and turbidity observed from space and in-situ in coastal waters. Ocean Sci. 2011, 7, 705–732. [Google Scholar] [CrossRef]
- Jafar-Sidik, M.; Gohin, F.; Bowers, D.; Howarth, J.; Hull, T. The relationship between Suspended Particulate Matter and Turbidity at a mooring station in a coastal environment: Consequences for satellite-derived products. Oceanologia 2017, 59, 365–378. [Google Scholar] [CrossRef]
- Gohin, F.; Druon, J.N.; Lampert, L. A five channel chlorophyll concentration algorithm applied to SeaWiFS data processed by SeaDAS in coastal waters. Int. J. Remote Sens. 2002, 23, 1639–1661. [Google Scholar] [CrossRef]
- Saulquin, B.; Gohin, F.; Garrello, R. Regional Objective Analysis for Merging High-Resolution MERIS, MODIS/Aqua, and SeaWiFS Chlorophyll-a Data from 1998 to 2008 on the European Atlantic Shelf. IEEE Trans. Geosci. Remote Sens. 2011, 49, 143–154. [Google Scholar] [CrossRef]
- Ruddick, K.; Neukermans, G.; Vanhellemont, Q.; Jolivet, D. Challenges and opportunities for geostationary ocean colour remote sensing of regional seas: A review of recent results. Remote Sens. Environ. 2014, 146, 63–76. [Google Scholar] [CrossRef]
- Liu, X.; Wang, M. Analysis of ocean diurnal variations from the Korean Geostationary Ocean Color Imager measurements using the DINEOF method. Estuar. Coast. Shelf Sci. 2016, 180, 230–241. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sand Type | Diameter Range (m) | Mean Diameter (m) |
|---|---|---|
| Sand1 | 0–50 | 25 |
| Sand2 | 50–100 | 75 |
| Sand3 | 100–200 | 150 |
| Sand4 | 200–500 | 350 |
| Sand5 | 500–1000 | 750 |
| Sand6 | 1000–2000 | 1500 |
| M1 | M2 | M3 | M4 | |
|---|---|---|---|---|
| range (mg/L) | 0.05–9.26 | 0.13–7.85 | 0.38–274 | 0.04–14.76 |
| Mean/Bias (mg/L) | 0.57 | 0.17 | ||
| Standard deviation (mg/L) | 1.00 | 1.22 | 13.18 | 1.11 |
| Median (mg/L) | 0.54 | 0.03 | 0.36 | |
| Median absolute deviation (mg/L) | 0.56 | 0.83 | 2.21 | 0.53 |
| Root-mean-square error (mg/L) | 1.15 | 1.22 | 13.37 | 1.12 |
| Normalized root-mean-square error (%) | 12.53 | 15.85 | 4.88 | 7.60 |
| Experiment | Different Error Estimators | M1 | M2 | M3 | M4 |
|---|---|---|---|---|---|
| Exp. 1 | Root-mean-square error (mg/L) | 1.43 | 1.25 | 5.10 | 1.68 |
| Exp. 1 | Normalized root-mean-square error (%) | 1.67 | 1.51 | 1.50 | 1.93 |
| Exp. 2 | Root-mean-square error (mg/L) | 1.92 | 1.47 | 5.75 | 1.39 |
| Exp. 2 | Normalized root-mean-square error (%) | 2.24 | 1.77 | 1.70 | 1.60 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Renosh, P.R.; Jourdin, F.; Charantonis, A.A.; Yala, K.; Rivier, A.; Badran, F.; Thiria, S.; Guillou, N.; Leckler, F.; Gohin, F.; et al. Construction of Multi-Year Time-Series Profiles of Suspended Particulate Inorganic Matter Concentrations Using Machine Learning Approach. Remote Sens. 2017, 9, 1320. https://doi.org/10.3390/rs9121320
Renosh PR, Jourdin F, Charantonis AA, Yala K, Rivier A, Badran F, Thiria S, Guillou N, Leckler F, Gohin F, et al. Construction of Multi-Year Time-Series Profiles of Suspended Particulate Inorganic Matter Concentrations Using Machine Learning Approach. Remote Sensing. 2017; 9(12):1320. https://doi.org/10.3390/rs9121320
Chicago/Turabian StyleRenosh, Pannimpullath R., Frédéric Jourdin, Anastase A. Charantonis, Khalil Yala, Aurélie Rivier, Fouad Badran, Sylvie Thiria, Nicolas Guillou, Fabien Leckler, Francis Gohin, and et al. 2017. "Construction of Multi-Year Time-Series Profiles of Suspended Particulate Inorganic Matter Concentrations Using Machine Learning Approach" Remote Sensing 9, no. 12: 1320. https://doi.org/10.3390/rs9121320
APA StyleRenosh, P. R., Jourdin, F., Charantonis, A. A., Yala, K., Rivier, A., Badran, F., Thiria, S., Guillou, N., Leckler, F., Gohin, F., & Garlan, T. (2017). Construction of Multi-Year Time-Series Profiles of Suspended Particulate Inorganic Matter Concentrations Using Machine Learning Approach. Remote Sensing, 9(12), 1320. https://doi.org/10.3390/rs9121320