UAV Remote Sensing Surveillance of a Mine Tailings Impoundment in Sub-Arctic Conditions



Abstract
1. Introduction
2. Study Area
3. Materials and Methods
3.1. UAV and Field Measurements
3.2. Data Processing
4. Results
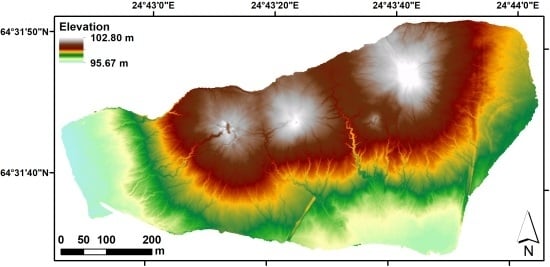
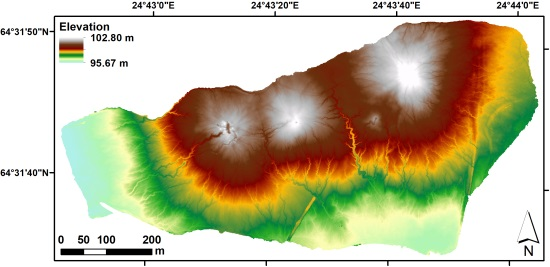
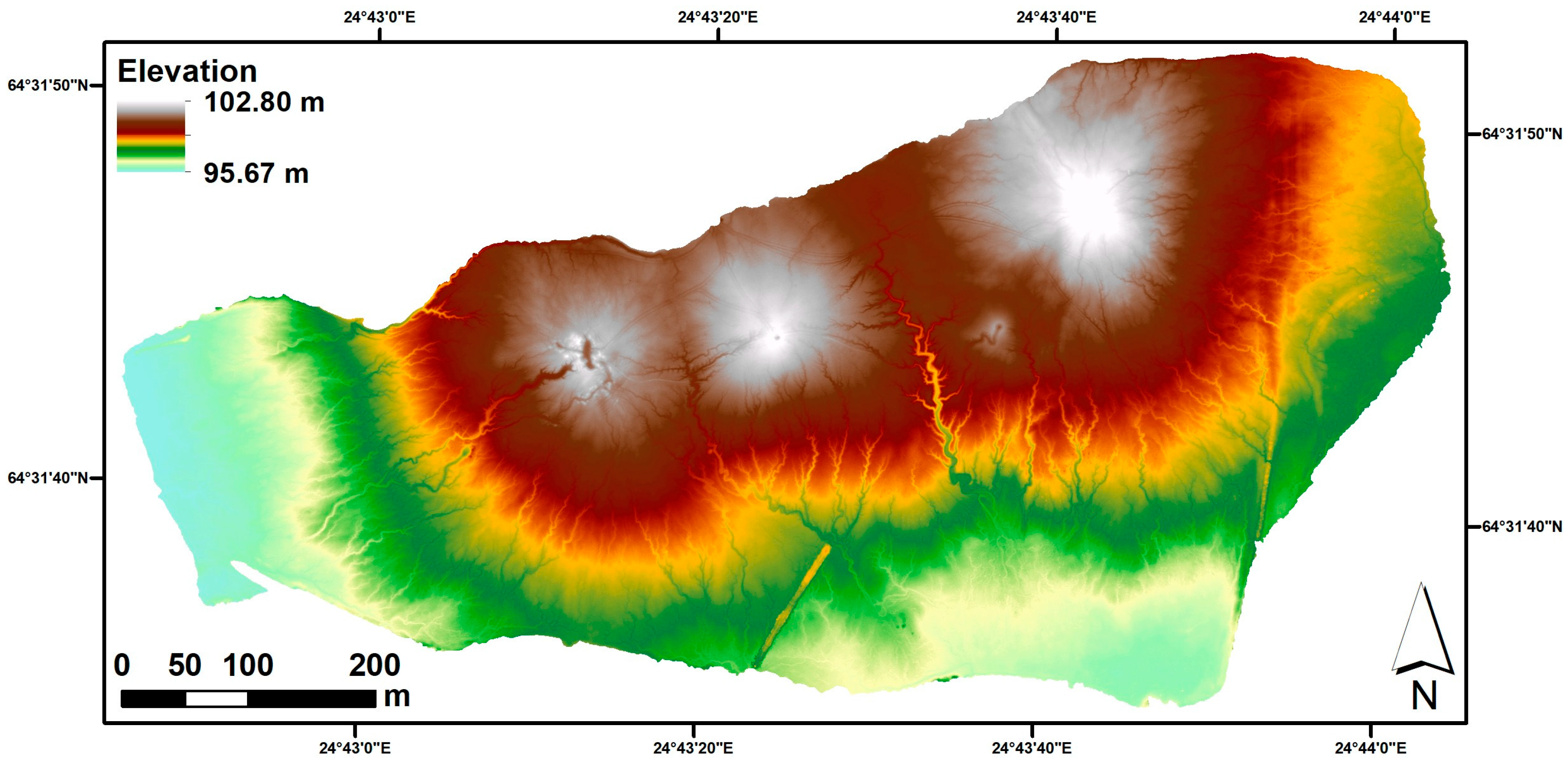
4.1. Orthomosaics and Digital Elevation Models
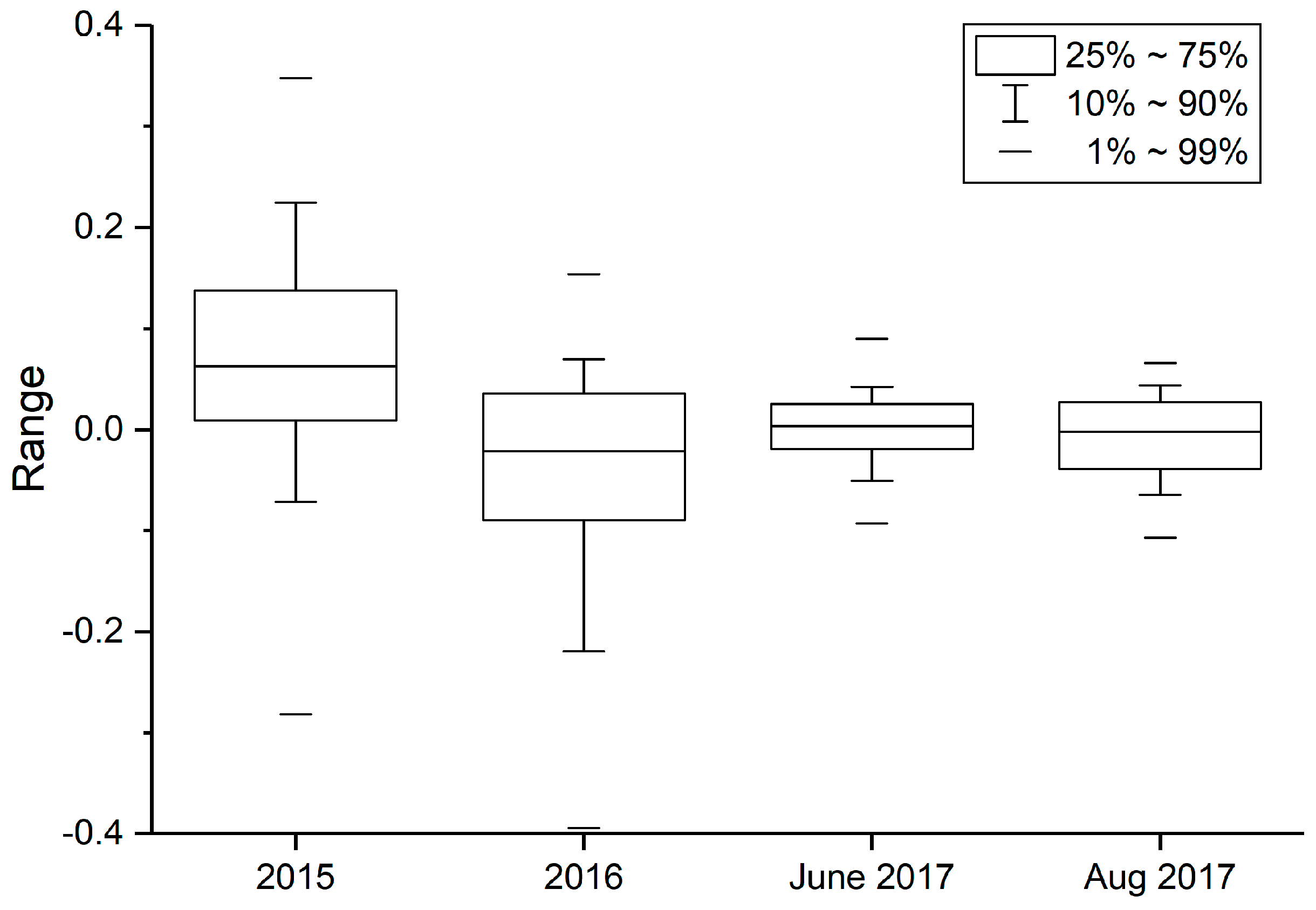
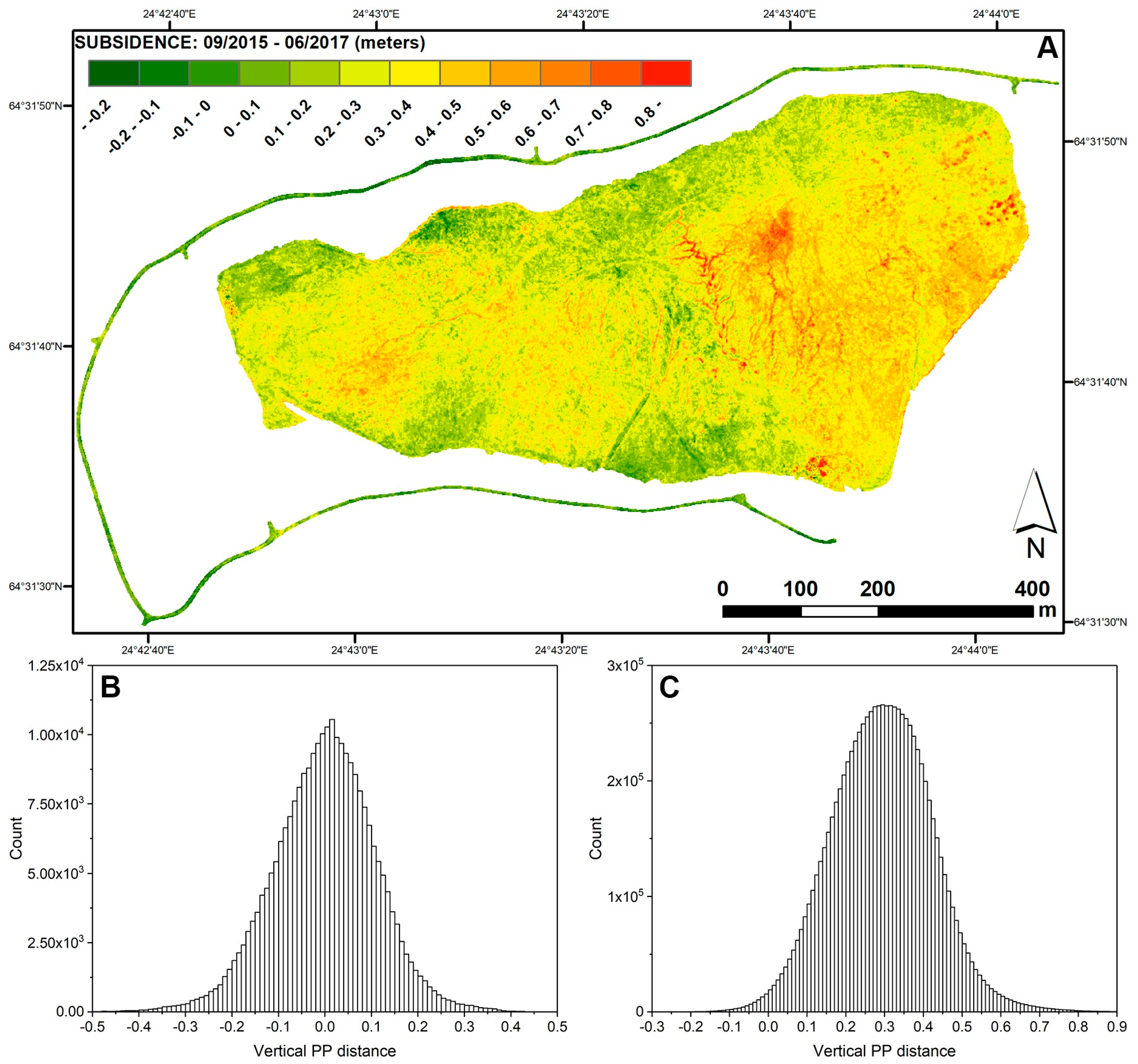
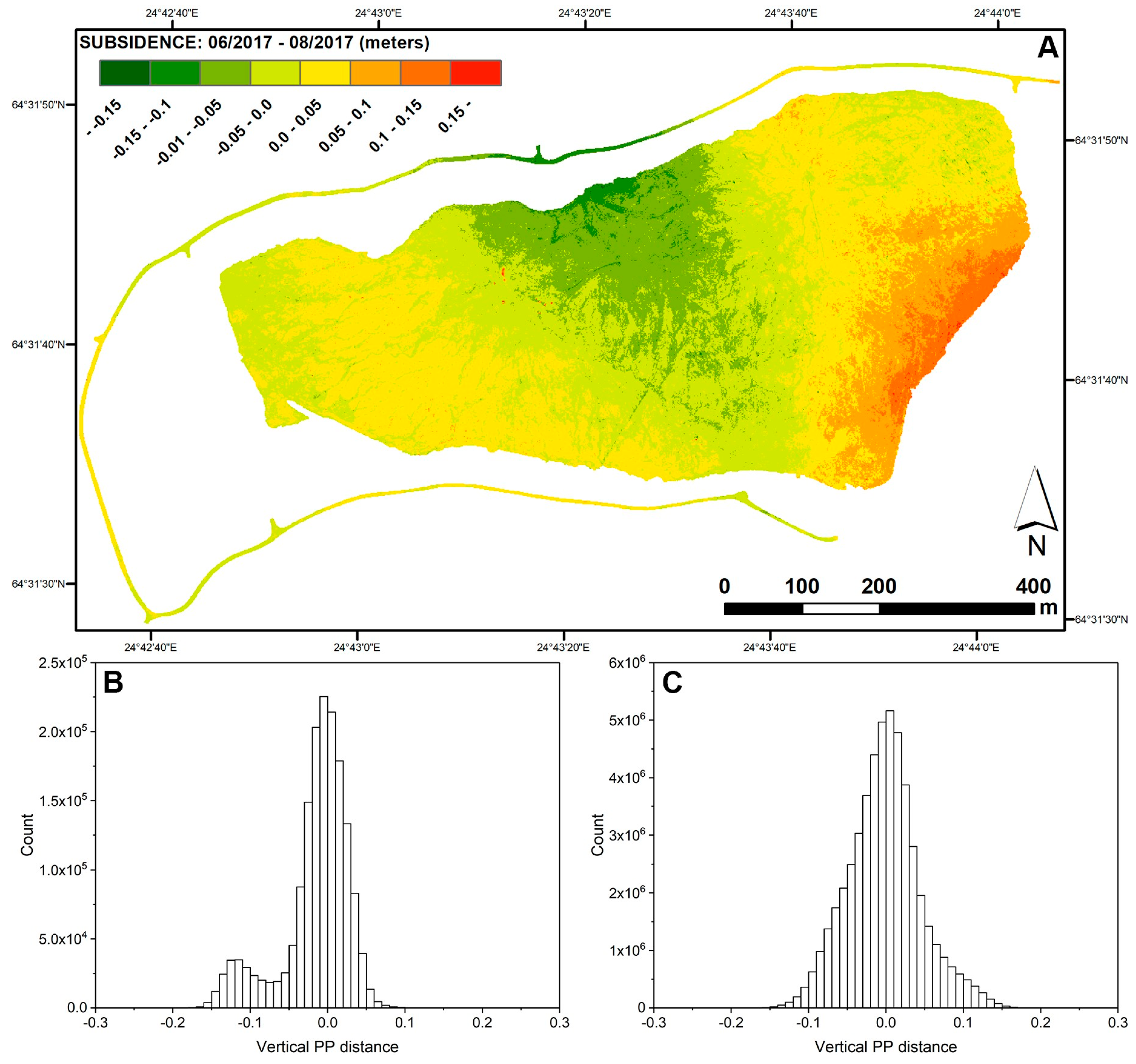
4.2. DEMs of Difference
5. Discussion
5.1. Results and Accuracy
5.2. Application of UAVs for Monitoring Tailings Inpoundments
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- European Commission. Reference Document on Best Available Techniques for Management of Tailings and Waste-Rock in Mining Activities; European Commission: Brussels, Belgium, 2009; 557p. [Google Scholar]
- Wang, C.; Harbottle, D.; Liu, Q.; Xu, Z. Current state of fine mineral tailings treatment: A critical review on theory and practice. Miner. Eng. 2014, 58, 113–131. [Google Scholar] [CrossRef]
- Rico, M.; Benito, G.; Salgueiro, A.R.; Díez-Herrero, A.; Pereira, H.G. Reported tailings dam failures. A review of the European incidents in the worldwide context. J. Hazard. Mater. 2008, 152, 846–852. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, Q.D.; Boger, D.V. Application of rheology to solving tailings disposal problems. Int. J. Miner. Process. 1998, 54, 217–233. [Google Scholar] [CrossRef]
- Kwak, M.; James, D.F.; Klein, K.A. Flow behaviour of tailings paste for surface disposal. Int. J. Miner. Process. 2005, 77, 139–153. [Google Scholar] [CrossRef]
- Henriquez, J.; Simms, P. Dynamic imaging and modelling of multilayer deposition of gold paste tailings. Miner. Eng. 2009, 22, 128–139. [Google Scholar] [CrossRef]
- Edraki, M.; Baumgartl, T.; Manlapig, E.; Bradshaw, D.; Franks, D.M.; Moran, C.J. Designing mine tailings for better environmental, social and economic outcomes: A review of alternative approaches. J. Clean. Prod. 2014, 84, 411–420. [Google Scholar] [CrossRef]
- Jewell, R.J.; Fourie, A.B. Paste and Thickened Tailings—A Guide, 3rd ed.; Australian Centre for Geomechanics: Perth, Australia, 2015; 356p. [Google Scholar]
- Tacey, W.; Ruse, B. Making tailings disposal sustainable; a key business issue. In Paste and Thickened Tailings—A Guide, 2nd ed.; Jewell, R.J., Fourie, A.B., Eds.; Australian Centre for Geomechanics: Perth, Australia, 2006; pp. 13–22. [Google Scholar]
- Alakangas, L.; Dagli, D.; Knutsson, S. Literature Review on Potential Geochemical and Geotechnical Effects of Adopting Paste Technology under Cold Climate Conditions; Luleå Tekniska Universitet: Luleå, Sweden, 2013; 36p. [Google Scholar]
- Knutsson, R.; Viklander, P.; Knutsson, S. Stability considerations for thickened tailings due to freezing and thawing. In Proceedings of the Paste 2016—19th International Seminar on Paste and Thickened Tailings, Santiago, Chile, 5–8 July 2016. [Google Scholar]
- Ahmed, S.I.; Siddiqua, S. A review on consolidation behavior of tailings. Int. J. Geotech. Eng. 2014, 8, 102–111. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Pajares, G. Overview and current status of remote sensing applications based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–329. [Google Scholar] [CrossRef]
- Allemand, P.; Delacourt, C.; Grandjean, P. Potential and limitation of UAV for monitoring subsidence in municipal landfills. Int. J. Environ. Technol. Manag. 2014, 17, 1–13. [Google Scholar] [CrossRef]
- Pierzchała, M.; Talbot, B.; Astrup, R. Estimating soil displacement from timber extraction trails in steep terrain: Application of an unmanned aircraft for 3D modelling. Forests 2014, 5, 1212–1223. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; de Jong, S.M. Time series analysis of landslide dynamics using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Kumar, R. UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Fernández, T.; Pérez, J.; Cardenal, J.; Gómez, J.; Colomo, C.; Delgado, J. Analysis of landslide evolution affecting olive groves using UAV and photogrammetric techniques. Remote Sens. 2016, 8, 837. [Google Scholar] [CrossRef]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Lizarazo, I.; Angulo, V.; Rodríguez, J. Automatic mapping of land surface elevation changes from UAV-based imagery UAV-based imagery. Int. J. Remote Sens. 2017, 38, 2603–2622. [Google Scholar] [CrossRef]
- Chen, J.; Li, K.; Chang, K.J.; Sofia, G.; Tarolli, P. Open-pit mining geomorphic feature characterisation. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 76–86. [Google Scholar] [CrossRef]
- Shahbazi, M.; Sohn, G.; Théau, J.; Menard, P. Development and evaluation of a UAV-photogrammetry system for precise 3D environmental modeling. Sensors 2015, 15, 27493–27524. [Google Scholar] [CrossRef] [PubMed]
- Tong, X.; Liu, X.; Chen, P.; Liu, S.; Luan, K.; Li, L.; Liu, S.; Liu, X.; Xie, H.; Jin, Y.; et al. Integration of UAV-based photogrammetry and terrestrial laser scanning for the three-dimensional mapping and monitoring of open-pit mine areas. Remote Sens. 2015, 7, 6635–6662. [Google Scholar] [CrossRef]
- Raeva, P.L.; Filipova, S.L.; Filipov, D.G. Volume computation of a stockpile—A study case comparing GPS and UAV measurements in an open pit quarry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 999–1004. [Google Scholar] [CrossRef]
- Rossi, P.; Mancini, F.; Dubbini, M.; Mazzone, F.; Capra, A. Combining nadir and oblique UAV imagery to reconstruct quarry topography: Methodology and feasibility analysis. Eur. J. Remote Sens. 2017, 50, 211–221. [Google Scholar] [CrossRef]
- Pirinen, P.; Simola, H.; Aalto, J.; Kaukoranta, J.P.; Karlsson, P.; Ruujela, R. Reports 2012:1—Climatological Statistics of Finland 1981–2010; Finnish Meteorological Institute: Helsinki, Finland, 2012; 96p. [Google Scholar]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; Wiley-Blackwell: Oxford, UK, 2016; p. 208. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- CloudCompare (ver. 2.8.1) [GNU GPL Software]. Available online: http://www.cloudcompare.org/ (accessed on 28 August 2017).
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F. Accuracy of digital surface models and orthophotos derived from Unmanned Aerial Vehicle Photogrammetry. J. Surv. 2016, 143, 04016025. [Google Scholar] [CrossRef]
- Jaud, M.; Passot, S.; Le Bivic, R.; Delacourt, C.; Grandjean, P.; Le Dantec, N. Assessing the accuracy of high resolution digital surface models computed by PhotoScan® and MicMac® in sub-optimal survey conditions. Remote Sens. 2016, 8, 465. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G. Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and Structure-from-Motion Photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]
- Gillan, J.K.; Karl, J.W.; Elaksher, A.; Duniway, M.C. Fine-resolution repeat topographic surveying of dryland landscapes using UAS-based structure-from-motion photogrammetry: Assessing accuracy and precision against traditional ground-based erosion measurements. Remote Sens. 2017, 9, 437. [Google Scholar] [CrossRef]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy assessment of digital surface models from Unmanned Aerial Vehicles’ imagery on glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Mosbrucker, A.R.; Major, J.J.; Spicer, K.R.; Pitlick, J. Camera system considerations for geomorphic applications of SfM photogrammetry. Earth Surf. Process. Landf. 2017, 42, 969–986. [Google Scholar] [CrossRef]
- Slocum, R.K.; Parrish, C.E. Simulated imagery rendering workflow for UAS-based photogrammetric 3D reconstruction accuracy assessments. Remote Sens. 2017, 9, 396. [Google Scholar] [CrossRef]
- Di Martire, D.; Iglesias, R.; Monells, D.; Centolanza, G.; Sica, S.; Ramondini, M.; Pagano, L.; Mallorquí, J.J.; Calcaterra, D. Comparison between Differential SAR interferometry and ground measurements data in the displacement monitoring of the earth-dam of Conza della Campania (Italy). Remote Sens. Environ. 2014, 148, 58–69. [Google Scholar] [CrossRef]
- Necsoiu, M.; Walter, G.R. Detection of uranium mill tailings settlement using satellite-based radar interferometry. Eng. Geol. 2015, 197, 267–277. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2015 | 2016 | June 2017 | August 2017 | |
|---|---|---|---|---|
| Date | 9 September 2015 | 28 July 2016 | 6 June 2017 | 8 August 2017 |
| Camera | Canon SX260 | Canon EOS M | Sony RX1R II | Sony RX1R II |
| Resolution | 12 MP | 18 MP | 42 MP | 42 MP |
| Focal length | 25 mm | 35 mm | 35 mm | 35 mm |
| Images | 664 | 376 | 894 | 711 |
| Flight height | 300 m | 150 m | 150 m | 150 m |
| Overlap | ~80/80 | ~40/40 1 | ~75/75 | ~75/75 |
| Covered area | ~2.8 km2 | ~1 km2 | ~1 km2 | ~1 km2 |
| GNSS | Topcon GR-5 | Topcon GR-5 | Satlab SLC | Satlab SLC |
| GCPs | 12 | 15 | 20 | 19 |
| 2015 | 2016 | June 2017 | August 2017 | |
|---|---|---|---|---|
| GCPs | 12 | 14 | 20 | 18 |
| XY (cm) | 2.638 | 3.654 | 1.744 | 1.267 |
| Z (cm) | 0.345 | 0.838 | 2.065 | 1.457 |
| Total (cm) | 2.050 | 3.749 | 2.463 | 1.785 |
| 2015 | 2016 | June 2017 | August 2017 | |
|---|---|---|---|---|
| Ortho RES | 10 cm/pix | 3 cm/pix | 2 cm/pix | 2 cm/pix |
| DEM RES | 20 cm/pix | 6 cm/pix | 5 cm/pix | 5 cm/pix |
| DEM ME | 7.0 cm | −4.4 cm | 0.0 cm | −0.7 cm |
| DEM MAE | 10.8 cm | 8.5 cm | 2.8 cm | 3.5 cm |
| DEM RMSE | 13.8 cm | 12.2 cm | 3.6 cm | 4.2 cm |
| DEM STDEV | 11.9 cm | 11.4 cm | 3.6 cm | 4.2 cm |
| September 2015–June 2017 Road | September 2015–June 2017 Tailings | June 2017–August 2017 Road | June 2017–August 2017 Tailings | |
|---|---|---|---|---|
| Mean | −0.1 cm | 29.4 cm | −1.6 cm | −0.2 cm |
| STDEV | 11.0 cm | 12.9 cm | 4.4 cm | 4.7 cm |
| MAD | 8.6 cm | 10.2 cm | 3.2 cm | 3.6 cm |
| Q1 | −0.7 cm | 20.7 cm | −2.8 cm | −3.2 cm |
| Q3 | 0.7 cm | 37.9 cm | 1.2 cm | 2.4 cm |
| P0.5 | −32.8 cm | −2.9 cm | −14.7 cm | −11.6 cm |
| P99.5 | 30.6 cm | 67.7 cm | 6.0 cm | 13.1 cm |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rauhala, A.; Tuomela, A.; Davids, C.; Rossi, P.M. UAV Remote Sensing Surveillance of a Mine Tailings Impoundment in Sub-Arctic Conditions. Remote Sens. 2017, 9, 1318. https://doi.org/10.3390/rs9121318
Rauhala A, Tuomela A, Davids C, Rossi PM. UAV Remote Sensing Surveillance of a Mine Tailings Impoundment in Sub-Arctic Conditions. Remote Sensing. 2017; 9(12):1318. https://doi.org/10.3390/rs9121318
Chicago/Turabian StyleRauhala, Anssi, Anne Tuomela, Corine Davids, and Pekka M. Rossi. 2017. "UAV Remote Sensing Surveillance of a Mine Tailings Impoundment in Sub-Arctic Conditions" Remote Sensing 9, no. 12: 1318. https://doi.org/10.3390/rs9121318
APA StyleRauhala, A., Tuomela, A., Davids, C., & Rossi, P. M. (2017). UAV Remote Sensing Surveillance of a Mine Tailings Impoundment in Sub-Arctic Conditions. Remote Sensing, 9(12), 1318. https://doi.org/10.3390/rs9121318