In our experiments, we validate the effectiveness of the proposed method on SAR and PolSAR images, respectively. Several saliency map generation methods are used for comparison. Since the pattern recurrence method proposed by Wang et al. [
21] is suitable for both SAR and PolSAR data, it is adopted as one compared method, named PRSaliency hereafter for simplicity. The method proposed by Tang et al. [
20] is a stable salient region detection method for SAR images, which considers the intensity variation, and will be used for the comparison of SAR data, named IVSaliency hereafter. For PolSAR image comparison, we adopt the method proposed by Huang et al. [
30], which is a saliency measure method for PolSAR data based on the dissimilarity between patches, named SDPolSAR hereafter. All of the parameters involved in these compared methods are set as the optimal values used in the corresponding references. In terms of the evaluation of different methods, we give qualitative comparisons with human visual observation and quantitative comparisons by using the receiver operating characteristic (ROC) analysis.
4.1. Experimental Results with Single-Polarization SAR Data
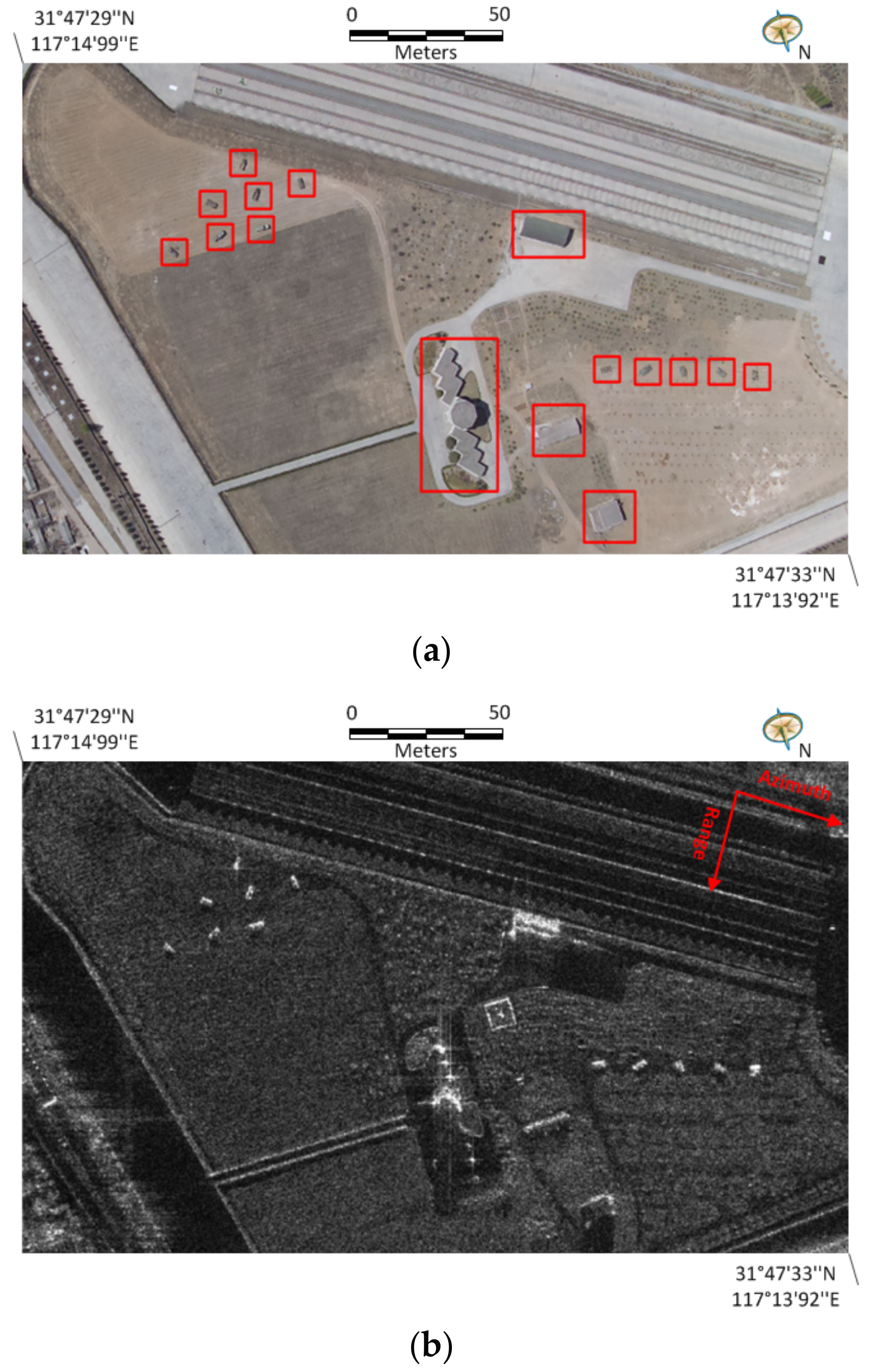
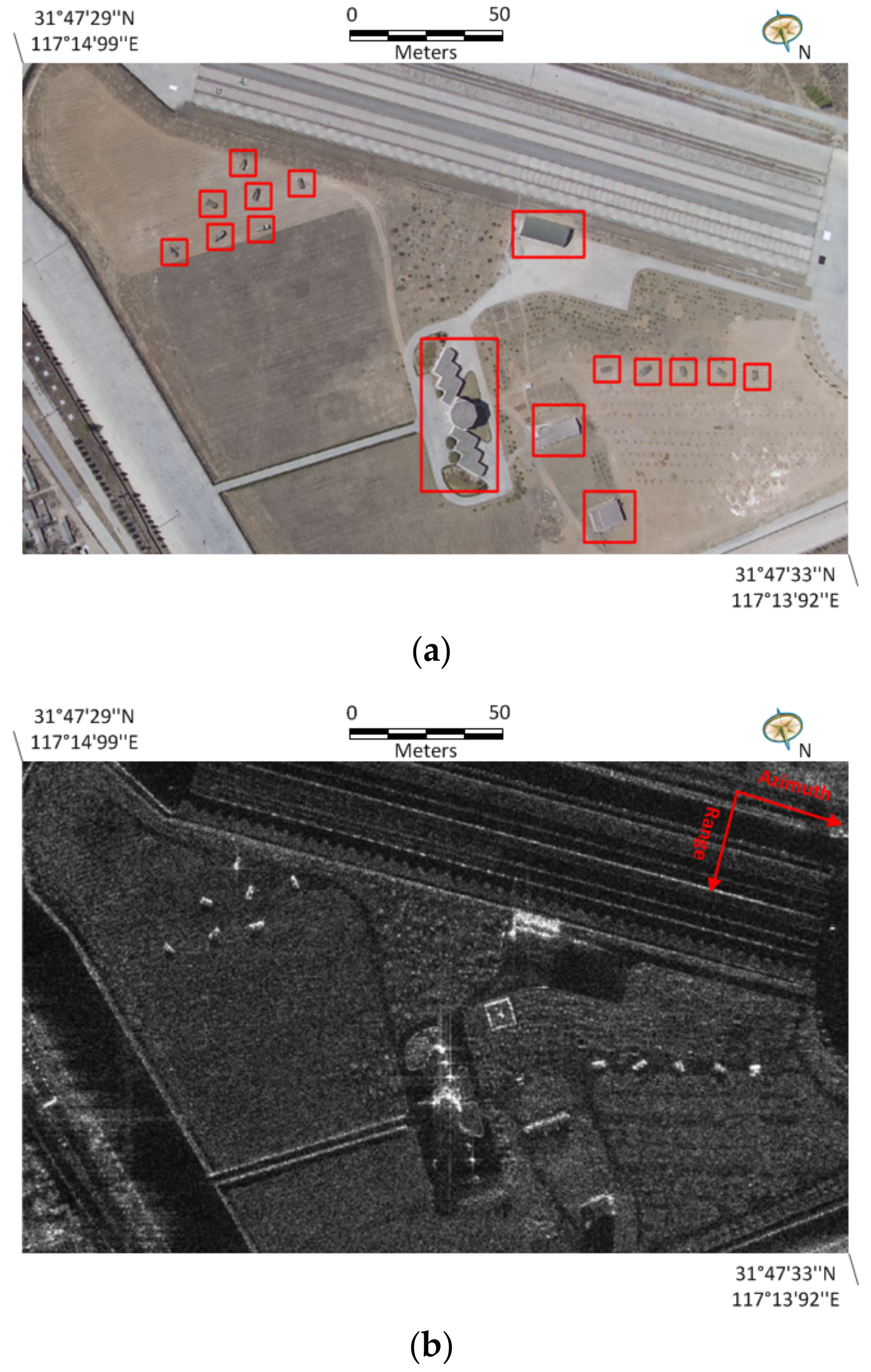
In this subsection, the first studied single-polarization SAR dataset was collected by a Chinese airborne SAR system with X band in 2005. This image was acquired in the stripmap mode HH polarization, as shown in
Figure 3b, with a resolution of 0.5 m both in azimuth and range directions. The image size is 300 × 500.
Figure 3a shows its corresponding optical photograph, i.e., the ground truth. As we can see, there are several vehicles, buildings, roads, and trees, leading to a complex background. From the human visual perspective, vehicles and buildings are generally of interest, and should be regarded as salient regions. They are marked with red rectangles in
Figure 3a. In addition, in
Figure 3b, we can see that there are some shadows near the vehicles and layovers near the buildings. These effects are common in SAR images, and we will check whether they influence the saliency map generation performance of our method in the following experiments.
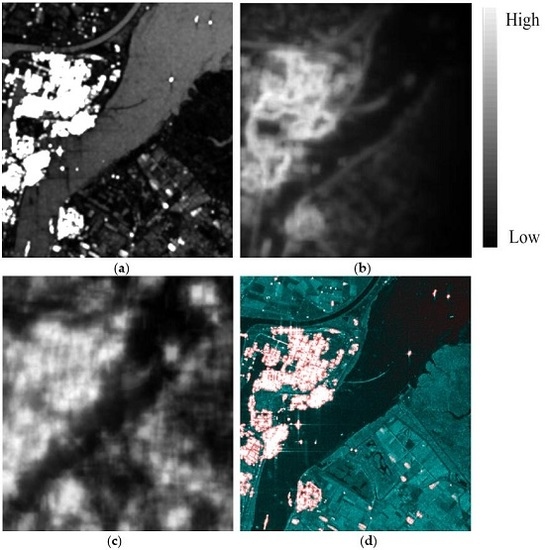
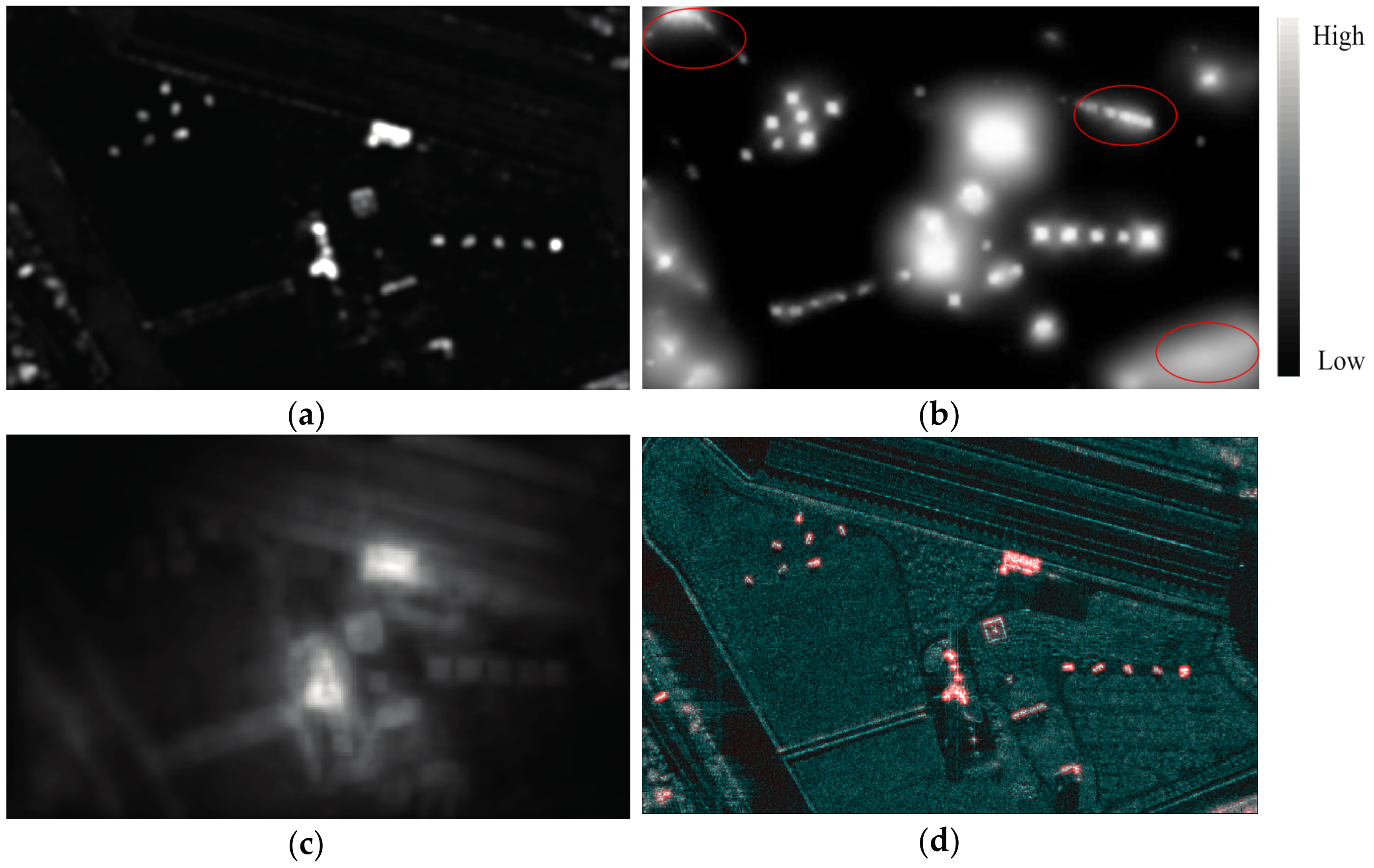
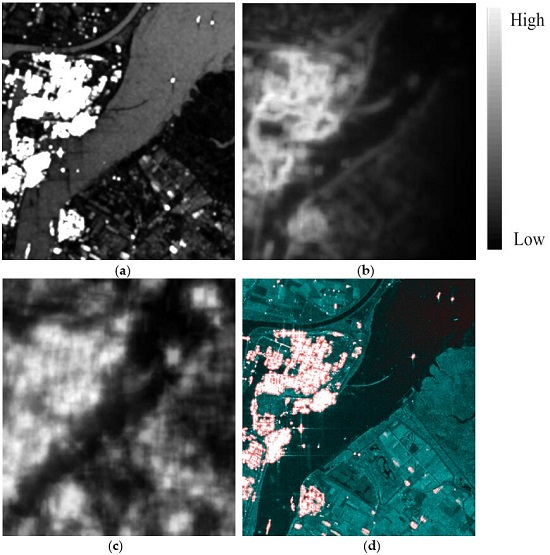
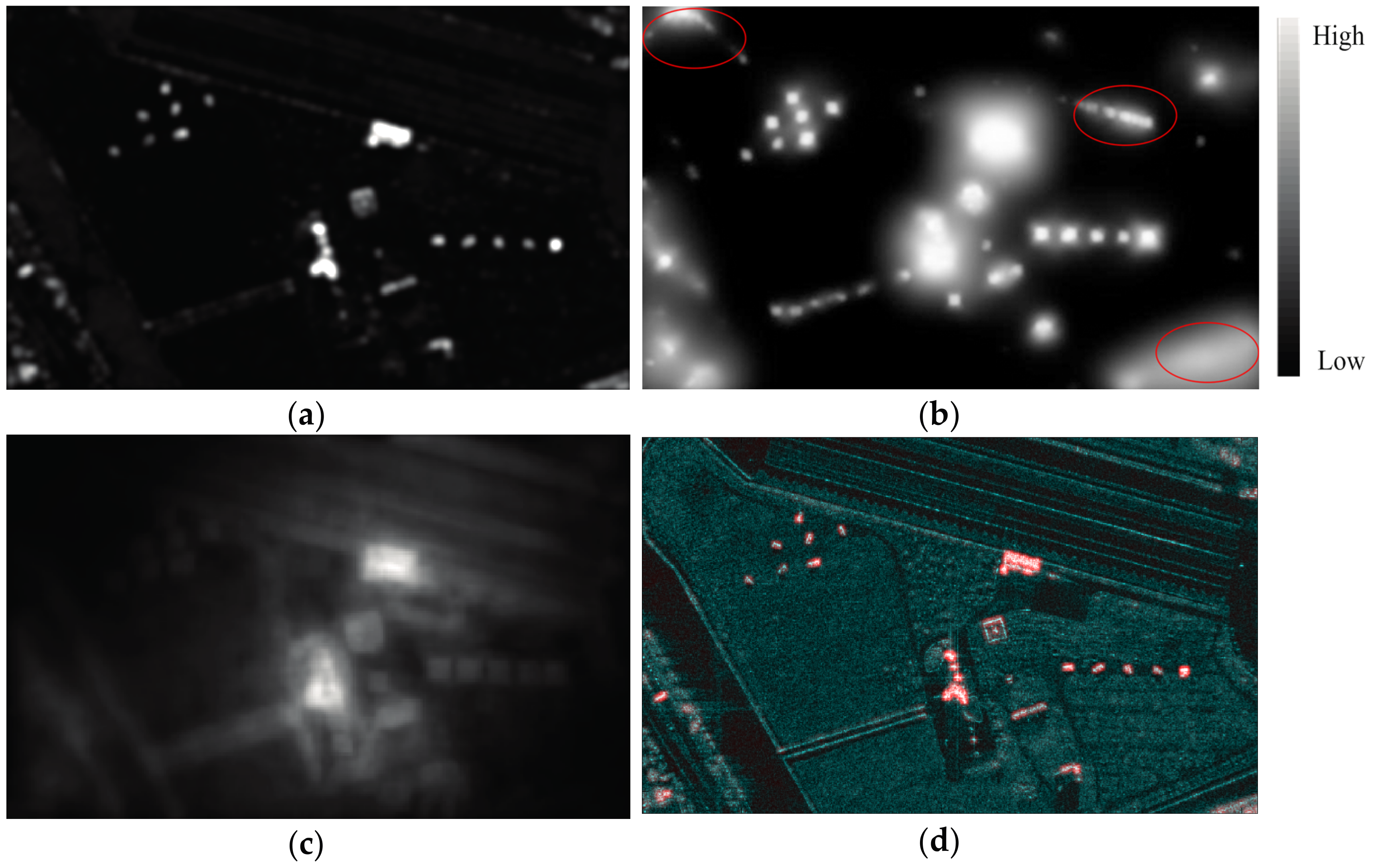
The images in
Figure 4a–c give the saliency map generation results using the proposed IVSaliency and PRSaliency methods, respectively, where the pixels with high intensities are salient. The saliency map obtained by our proposed method is overlaid onto the original SAR image to form a RGB image for further validation, as shown in
Figure 4d. Specifically, we use the saliency map to denote the red channel, and the original SAR image is represented by the green and blue channels. In our proposed method, the target region size is changed from 3 × 3 to 15 × 15 with step length six, i.e., the local window sizes are three, nine, and 15, respectively. The size of the background region is chosen as three times that of the target region size. From
Figure 4a, we can see that the buildings and vehicles are significantly salient and attract attention. Furthermore, different salient regions can be discriminated from each other very clearly. In contrast, the trees, roads, and flat ground exhibit low saliency, which is in accordance with human visual perception. Furthermore, we can also see that shadows and layovers do not degrade the performance of saliency map generation.
Figure 4b gives the result of the IVSaliency method, where we can find that the buildings and vehicles reveal extremely strong saliency values, whereas the background is not salient at all. The saliency contrast between targets and background is very significant, indicating that this method has a strong ability to measure the salient regions from SAR images. However, it can be seen that there are some obvious false alarms, such as the areas marked with red ellipses. These areas have no salient targets, but exhibit high saliency values, as shown in
Figure 4b. In addition, the resolution of the saliency map is lower in comparison with that of
Figure 4a. The shapes of the salient targets cannot preserve very well. The result of the PRSaliency method is given in
Figure 4c, where we can observe that it is worse than the other two methods. Buildings with large sizes can exhibit apparent saliency, whereas other man-made targets, including the vehicles, have quite low saliency due to their small sizes. In addition, the resolution of the saliency map is not satisfactory, leading to the loss of salient target details. From the overlaid result displayed in
Figure 4d, it can be demonstrated that our proposed method can effectively measure the salient regions and suppress the saliency of the background. Furthermore, the salient target details can be well preserved, leading to a high discrimination ability among the different targets.
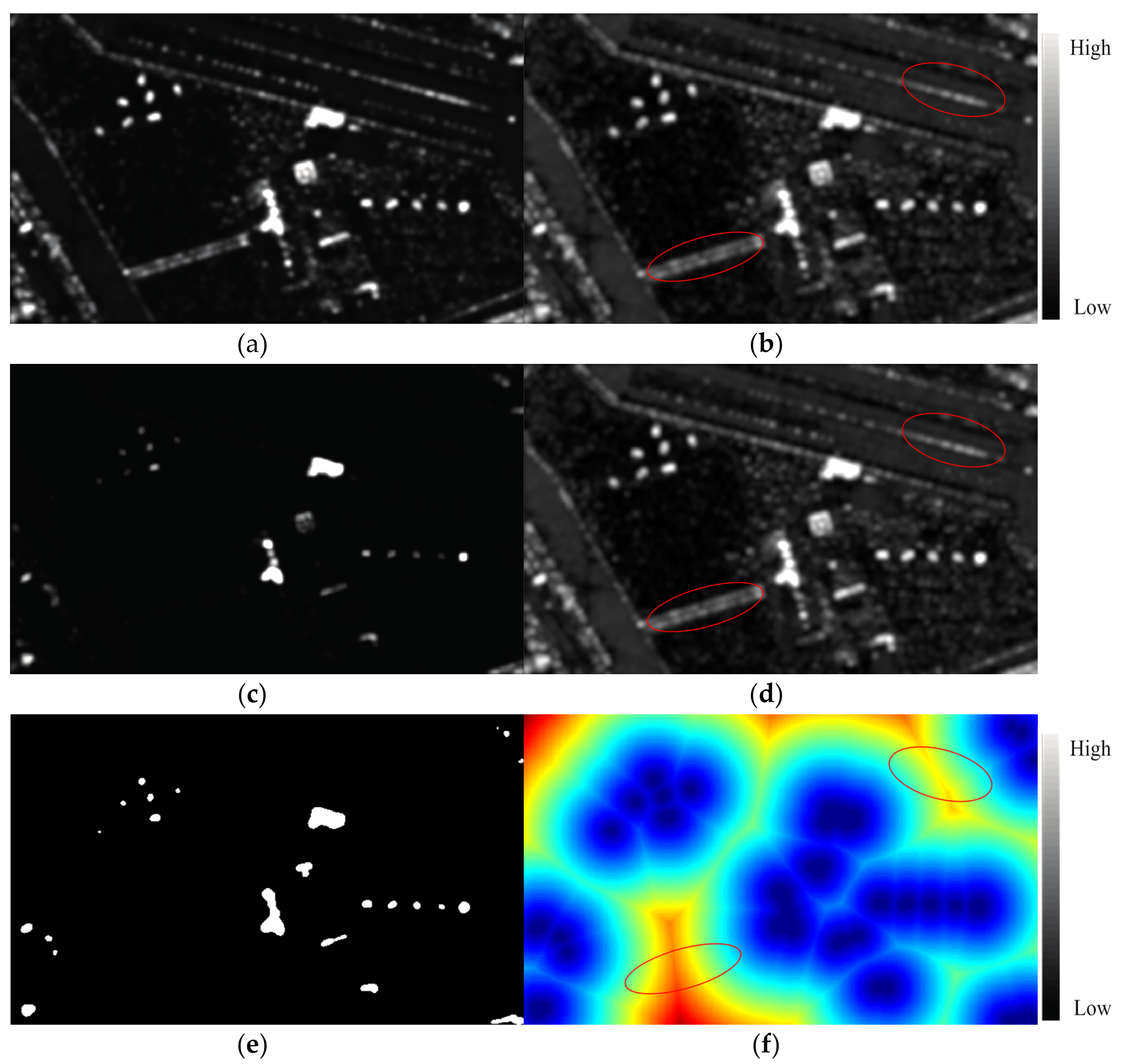
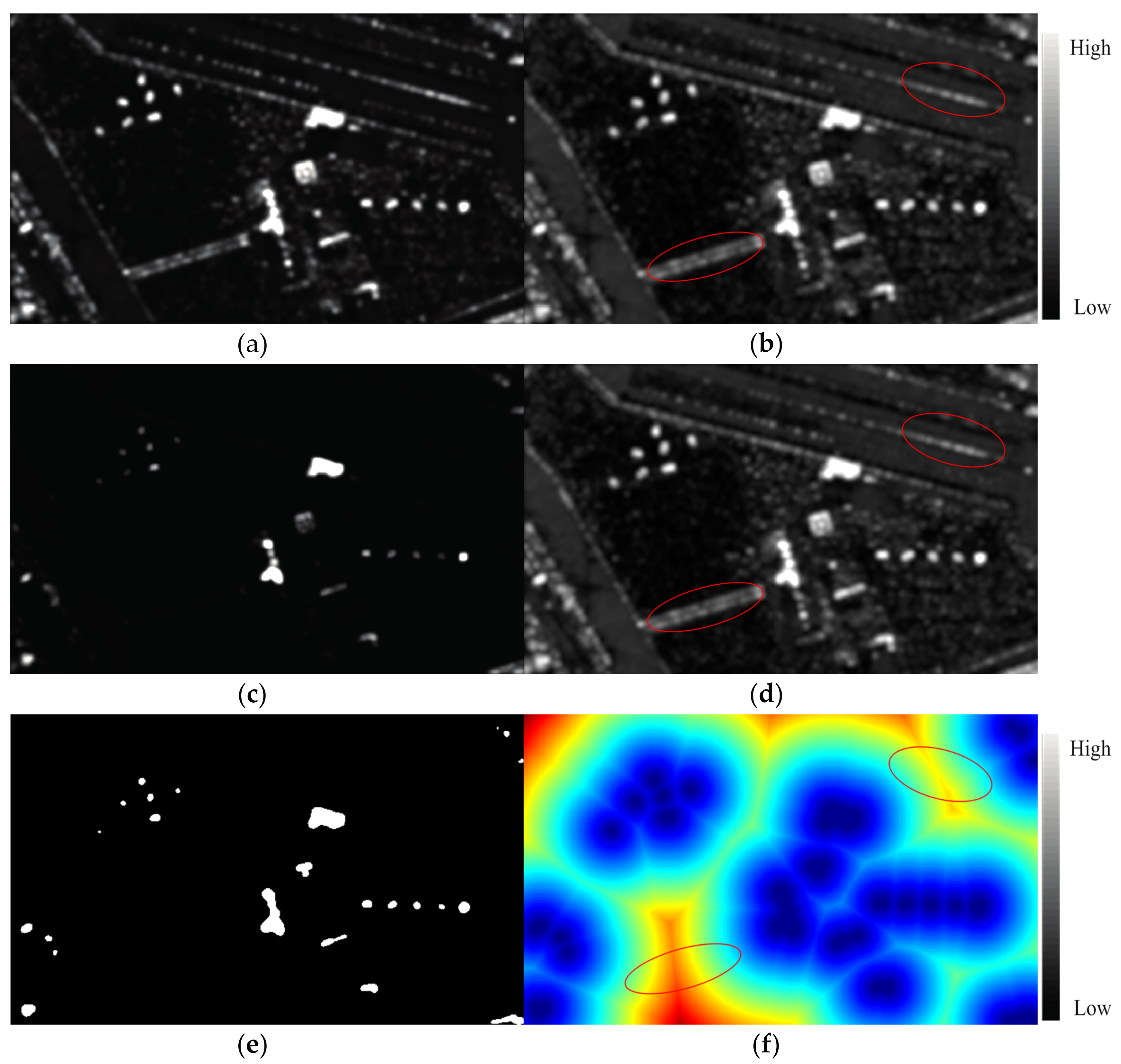
To further analyze the contributions of the different stages involved in the proposed method, we give the intermediate results in
Figure 5.
Figure 5a,b are the local and global saliency maps with a single scale, i.e., the target region sizes are both set as 9 × 9.
Figure 5c gives the combined saliency map using the results of
Figure 5a,b, according to Equation (7). What we can see from the first two images is that the salient targets in the local saliency map are more apparent and significant than those in the global saliency map. However, more false alarms exist, such as the roads and trees with relatively high backscattering. The reason is that in the estimation of the Gamma distribution parameters, the background samples in the local areas can get more accurate results than those in the global areas, since the local areas are approximately homogeneous. Therefore, the pixels with relatively high backscattering in the local regions reveal high saliency values. Thus, it can be remarked that compared to the global saliency map in
Figure 5b, the local method can enhance the saliency of man-made targets at the cost of leading to high false alarms. In
Figure 5c, it can be seen that the combined saliency measure considers the advantages of local and global saliency maps simultaneously. The saliency of man-made targets is enhanced, whereas that of the background is suppressed.
Figure 5d depicts the multiscale saliency map before the refinement. Compared with the saliency maps with single scale in
Figure 5a–c, we can find that the multiscale processing can enhance the saliency of man-made targets. Meanwhile, the saliency of the background can be suppressed to some extent. This good performance benefits from the settings of different target region sizes, which can capture the saliency of targets with various sizes. However, we can still find some false alarms, such as the areas marked with the red ellipses, which can be further suppressed by the following refinement stage.
Figure 5e gives the focus of attention regions, namely the potential targets. The distance map
is shown in
Figure 5f. It can be found that the pixels surrounding the focus of attention points have quite low distance values. In contrast, the roads and trees that are far away from the focus of attention points have high distance values, as shown in the red elliptic areas. According to the refinement in Equation (15), the saliency of the pixels that are far away from the focus of attention points can be further suppressed, which can be observed from the comparison between
Figure 4a and
Figure 5f.
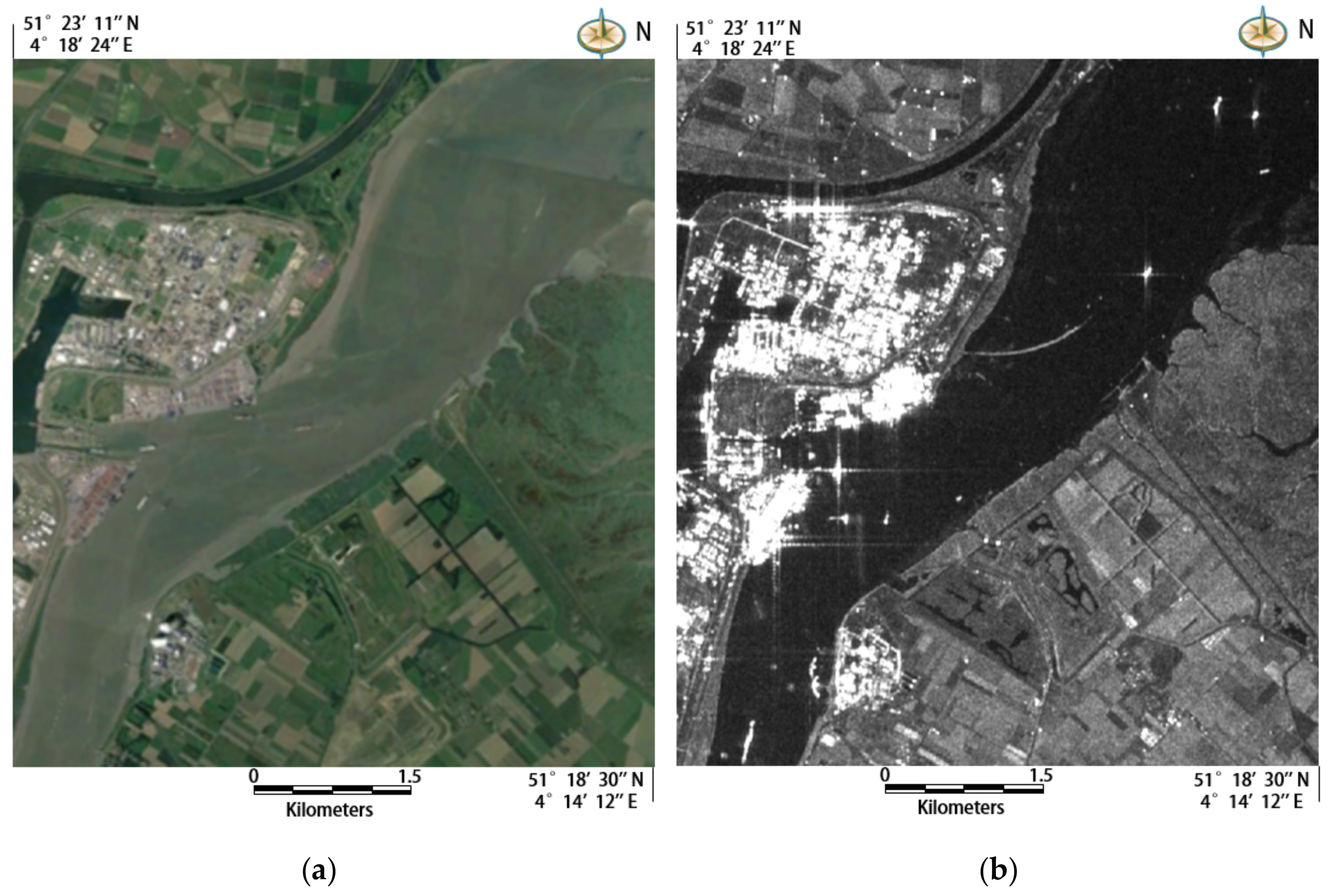
The second studied single-polarization SAR dataset was collected by the Sentinel-1 SAR sensor with C-band in 2014. The study area is located in the city of Antwerp, Belgium. This image was acquired with Level-1 ground range detected (GRD) data type, as shown in
Figure 6b. It was multi-looked with a factor of six, and the resolution of resulting image is about 10 m both in azimuth and range directions. The image size is 800 × 700.
Figure 6a shows its corresponding optical photograph, i.e., the ground truth. As we can see, there are high-density residential areas, low-density residential areas, rivers, farmlands, forests, and some ships on the river, which lead to a quite complex scene. From the perspective of human visual observation, ships and urban buildings are generally of interest, and should be regarded as salient objects. Note that there are some sidelobes around the ship targets and buildings, which may bring some challenges to the SAR image interpretation. In the following experiments, we will demonstrate the robustness of the sidelobes of our proposed method on saliency map generation.
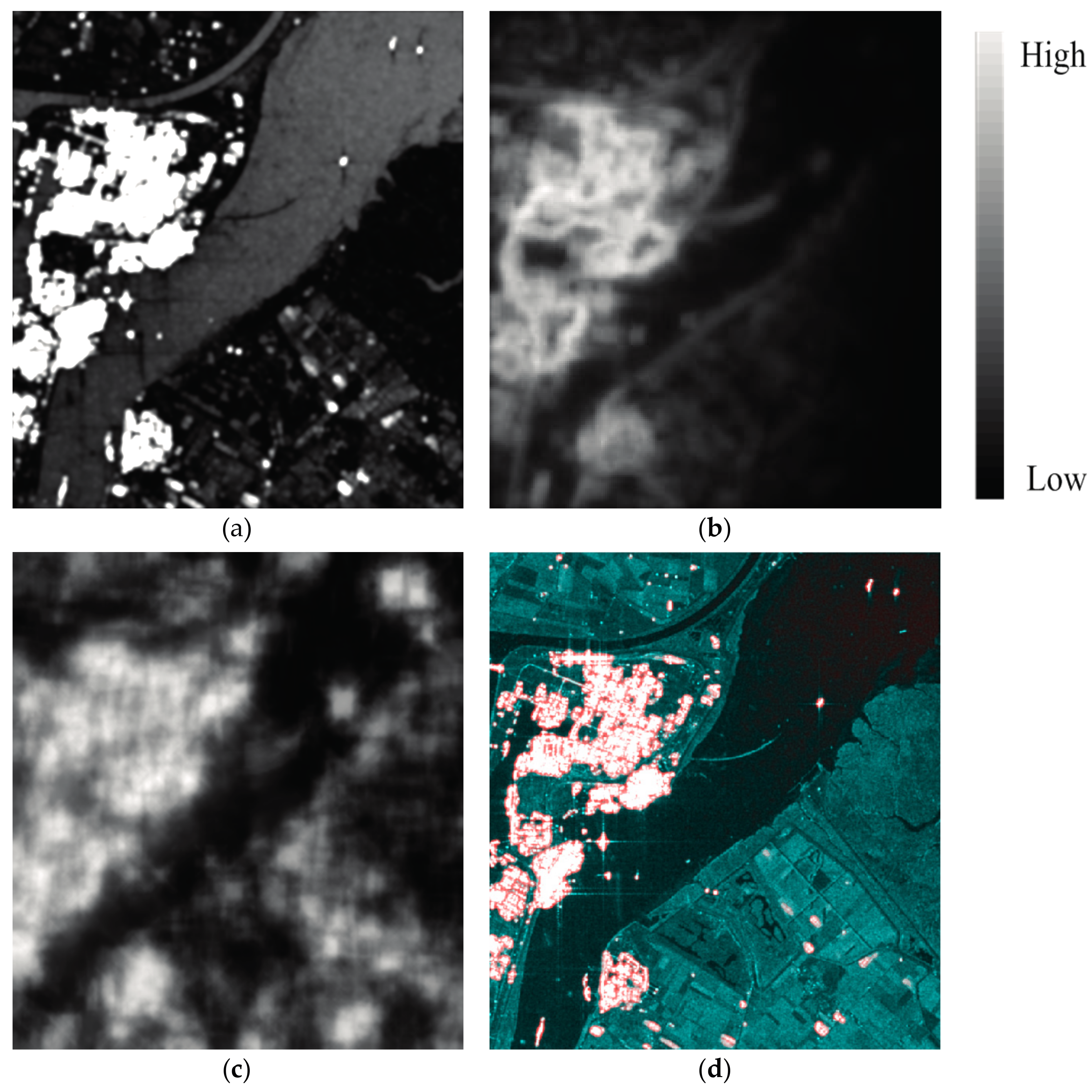
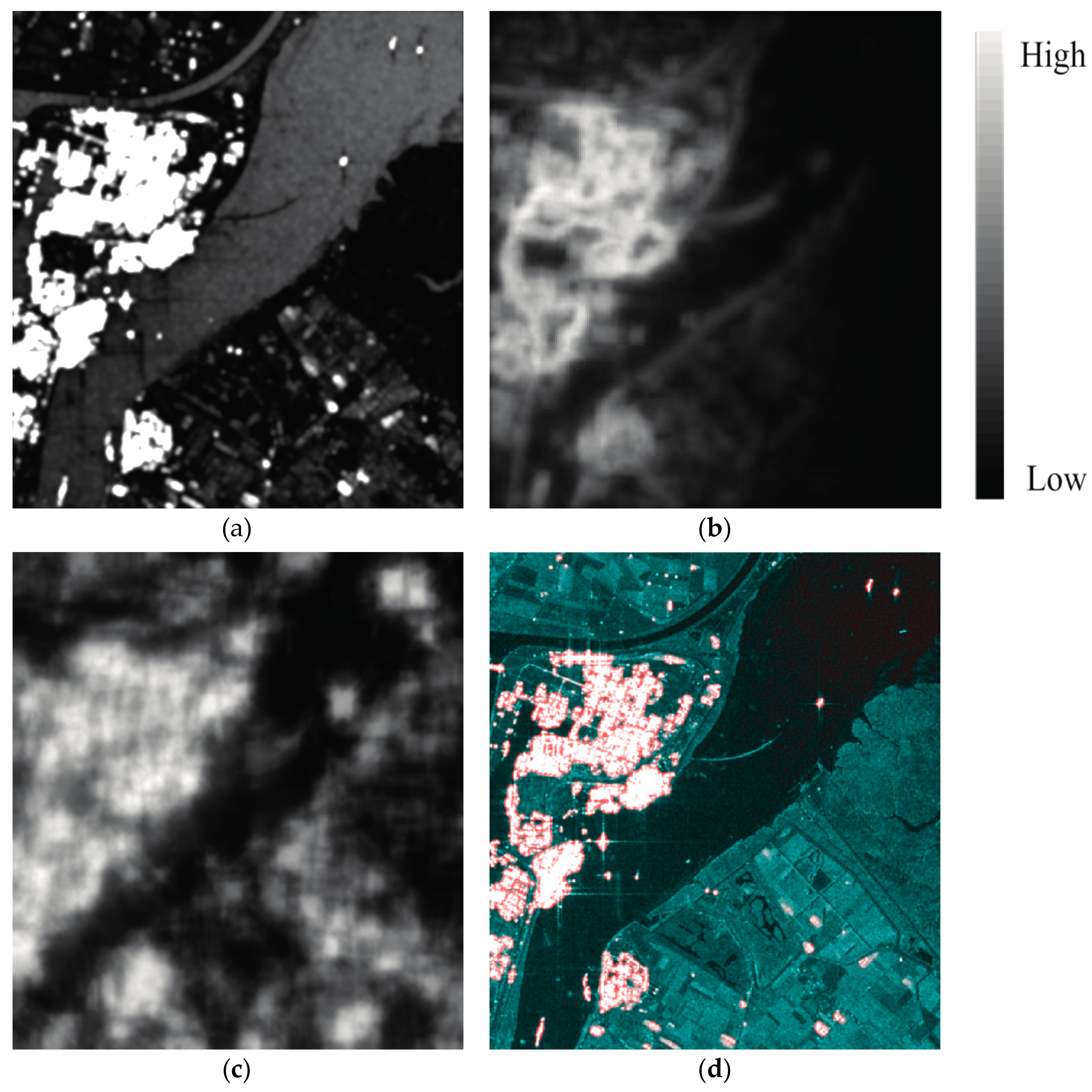
The images in
Figure 7a–c present the saliency maps generated by the proposed IVSaliency and PRSaliency methods, respectively, where the pixels with high intensities are salient. Similarly, the saliency map obtained by our proposed method is overlaid onto the original SAR image to form a RGB image for further validation, as shown in
Figure 7d. The target region size and background region size in the proposed method are set as before in the previous experiment. It can be seen from
Figure 7a that the high-density residential areas, low-density residential areas, and ships on the river are all significantly salient, and attract human beings’ attention. In contrast, the natural areas such as farmlands, rivers, and vegetations have quite low saliency values, making the contrast between salient and nonsalient objects very clear. In addition, it also can be seen that the sidelobes around the ships and buildings do not exhibit high saliency values, indicating that the sidelobes in SAR images do not degrade the performance of the saliency map generation.
Figure 7b gives the result of the IVSaliency method, where we can find that only the high-density residential buildings reveal strong saliency values, whereas the low-density residential buildings and ships are not very salient. Moreover, the resolution of the saliency map is lower in comparison with that of
Figure 7a. The shapes of the salient objects cannot preserve very well. The result of the PRSaliency method is given in
Figure 7c, where we can find that the high-density residential buildings and low-density residential buildings both exhibit strong salieny values. However, the ships on the river have quite low saliency due to their small sizes. In addition, the resolution of the saliency map is still not satisfactory, leading to the loss of salient target details. From the overlaid result displayed in
Figure 7d, it can be demonstrated that our proposed method is still effective for measuring the salient regions of C band SAR images with complex scenes. More importantly, the proposed method is robust to the sidelobes.
4.3. Experimental Results with PolSAR Data
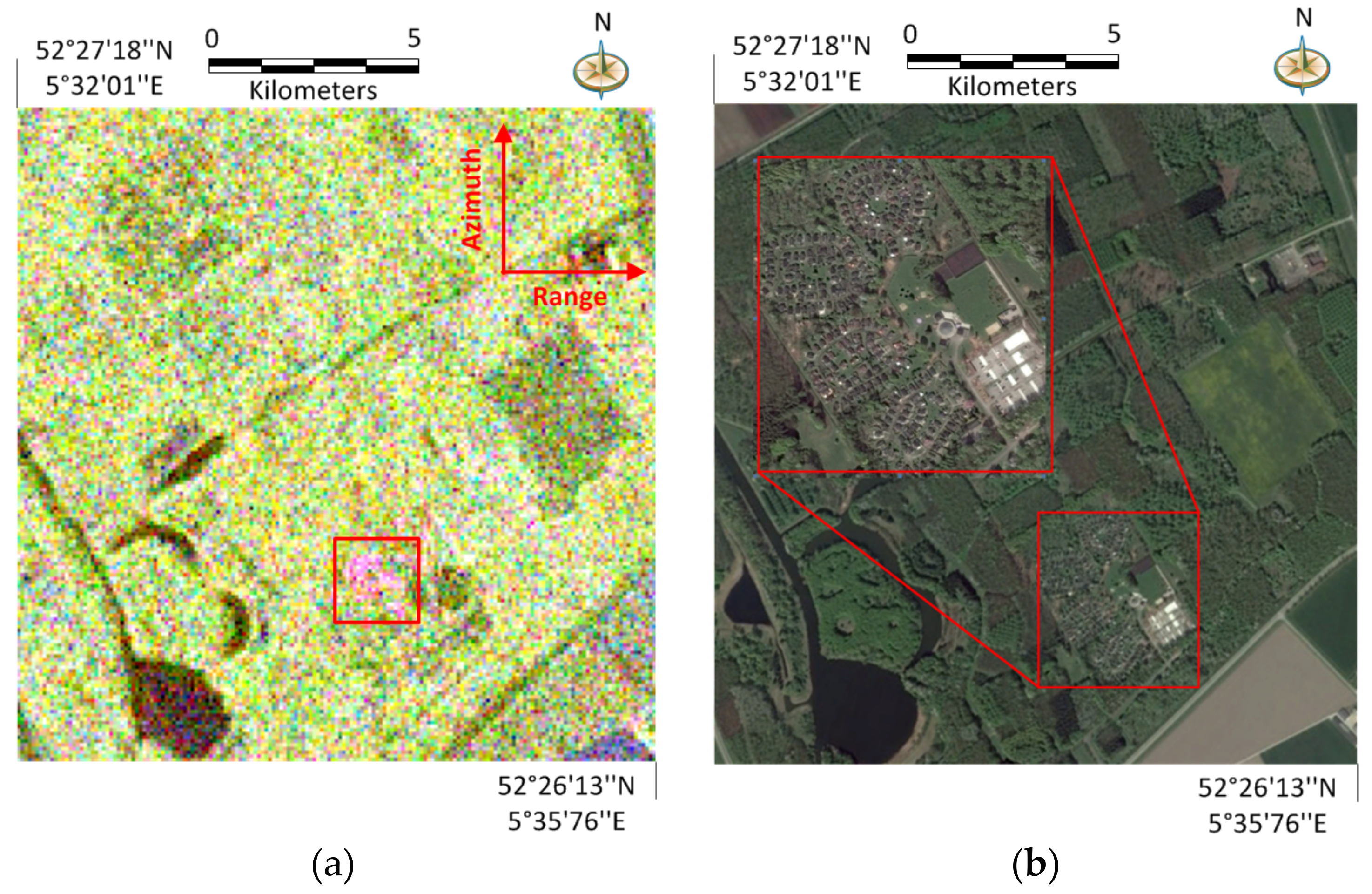
In this subsection, we utilize two PolSAR datasets to validate the effectiveness of our proposed method. The first one is acquired by the fully polarimetric Radarsat-2 C band sensor on 2 April 2008 with the fine mode over the Flevoland area, which is a city located in the center of the Netherlands. The range resolution and azimuth resolution are 5.4 m and 8.0 m, respectively. The Pauli-coded image is shown in
Figure 8a, where the red channel represents double-bounce scattering, the green channel describes volume scattering, and the blue channel shows single-bounce scattering. The image rows correspond to the azimuth direction, and the columns correspond to the range direction. It can be seen that serious speckle noise exists in this PolSAR image, which makes the saliency map generation difficult to handle.
Figure 8b is the corresponding optical image obtained from Google Earth. This study area covers some buildings, farms, grasslands, and lakes. Note that this test area is relatively uniform, with some buildings in the natural background. From the aspect of human visual observation, the buildings should be of interest and regarded as salient targets, which depict double-bounce scattering in the PolSAR image, as shown in the area with the red rectangle in
Figure 8a. In
Figure 8b, the built-up areas in the lower right area of the image are enlarged for the observation of the details. From
Figure 8a,b, it is worth pointing out that not all of the buildings reveal double-bounce scattering. The reason is that the buildings that are not parallel to the radar flight path have strong cross-polarized scattering, which is similar to the scattering mechanisms of the natural areas [
3,
8,
10]. In the PolSAR image, these buildings show a green color, and are difficult to be discriminated from forests. Therefore, these buildings are not salient in the view of human visual perception.
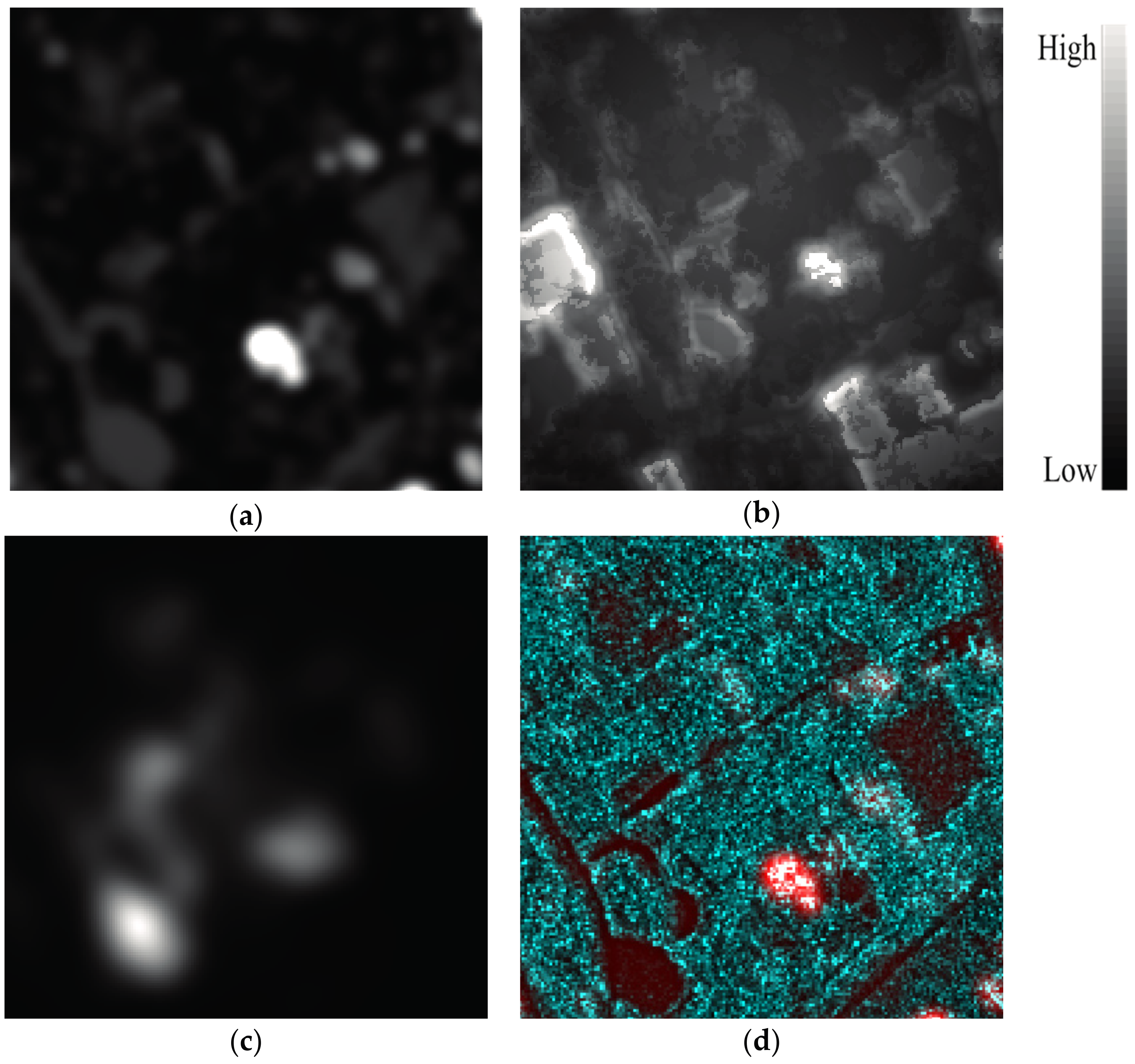
Figure 9a–c present the final saliency maps generated by using the proposed SDPolSAR and PRSaliency methods, respectively, where the pixels with high intensities are salient. Note that the parameter settings are the same as those in the previous experiment.
Figure 9d shows the span image overlaid with the saliency map of our proposed method, where the red area denotes the salient region. From
Figure 9a,d, we can observe that our method can effectively measure the salient regions with double-bounce scattering, such as the built-up areas. In contrast, the saliency values of the background areas, including the forests, farms, grasslands, and lakes are all suppressed. Although the PolSAR image is seriously contaminated by the multiplicative speckle noise, the saliency map does not have a lot of isolated points, making the salient region smooth. What we can see from
Figure 9b is that the SDPolSAR method can also highlight the built-up areas with double-bounce scattering; however, the edges of the salient region are not very clear. Furthermore, the background also reveals relatively high saliency, such as the boundaries between different natural areas. Therefore, it can be remarked that the saliency contrast between the target and the background in
Figure 9b is not as significant as that in
Figure 9a. The result displayed in
Figure 9c is worse than other two methods, where the saliency of the built-up areas is lower than that of the lakes. However, it is worth pointing out that the result is quite smooth, indicating that this method is quite robust to the speckle noise. From the above analysis, we can find that the proposed method can effectively measure the salient regions from PolSAR data with relatively uniform background, and thus outperforms the other two methods.
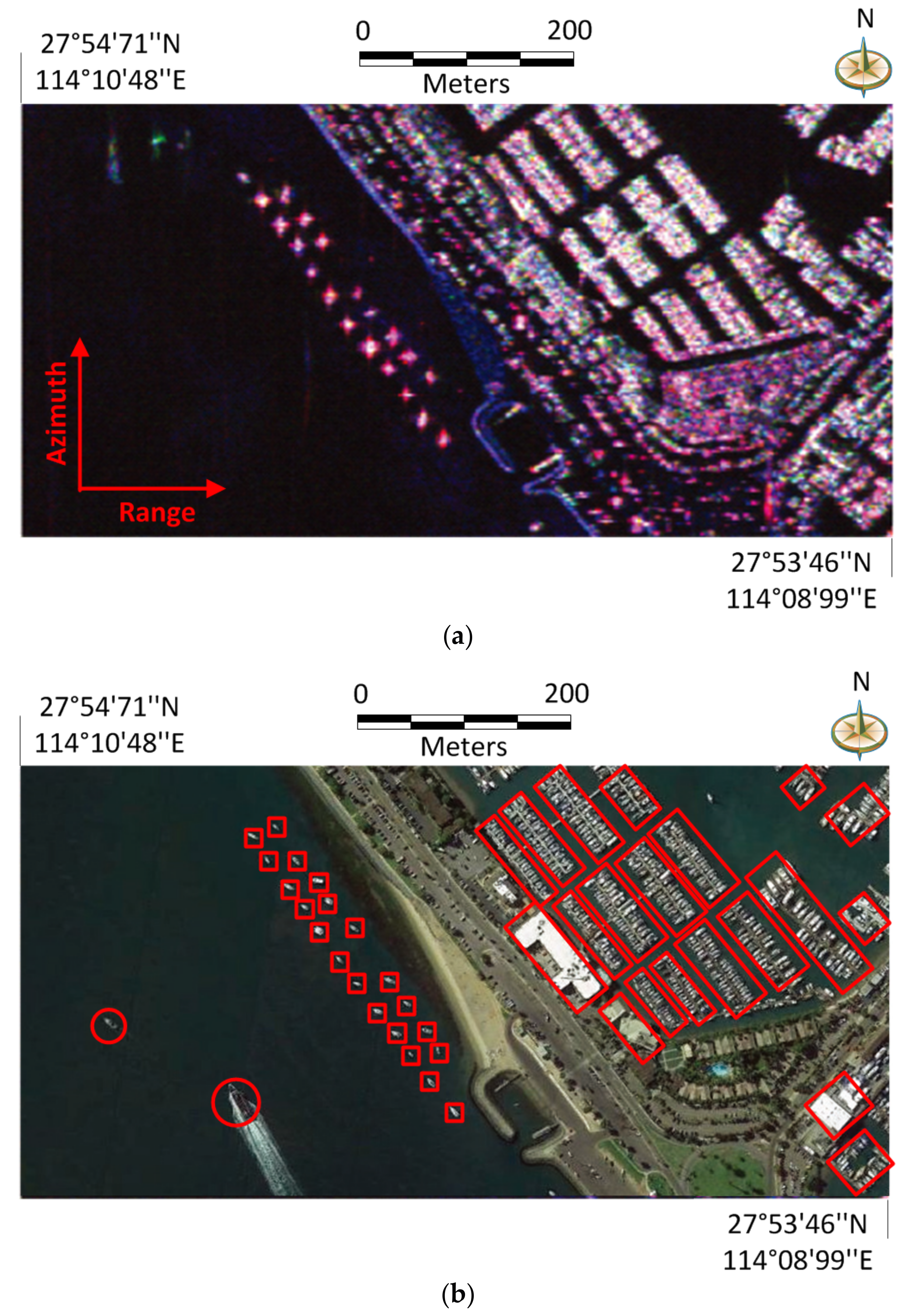
The second PolSAR dataset is acquired by the UAVSAR L-band imaging system. The study area is a harbor located in the southern California coast of the United States, as shown in
Figure 10b. This area covers open water, some buildings, isolated boats, and man-made grounds, which is a complex image scene.
Figure 10a displays the full polarimetric SAR image with Pauli-color coding, where the rows denote the azimuth direction and the columns represent the range direction. The multilook complex data have a resolution with 7.2 m in the azimuth direction and 5 m in the range direction. From the perspective of human visual perception, the boats and buildings are of interest, and should be regarded as salient objects, which are marked with red rectangles in
Figure 10b. Due to the relatively low resolution, the vehicles on the road are too small to be regarded as salient objects. Note that there are two ships in
Figure 10b, but they disappear in
Figure 10a, as depicted in the two red circles. It is worth pointing out that the optical image is acquired from Google Earth, which has a different date than that of the PolSAR image; therefore, the two ships may move out of this place. They are ignored in the following comparison analysis.
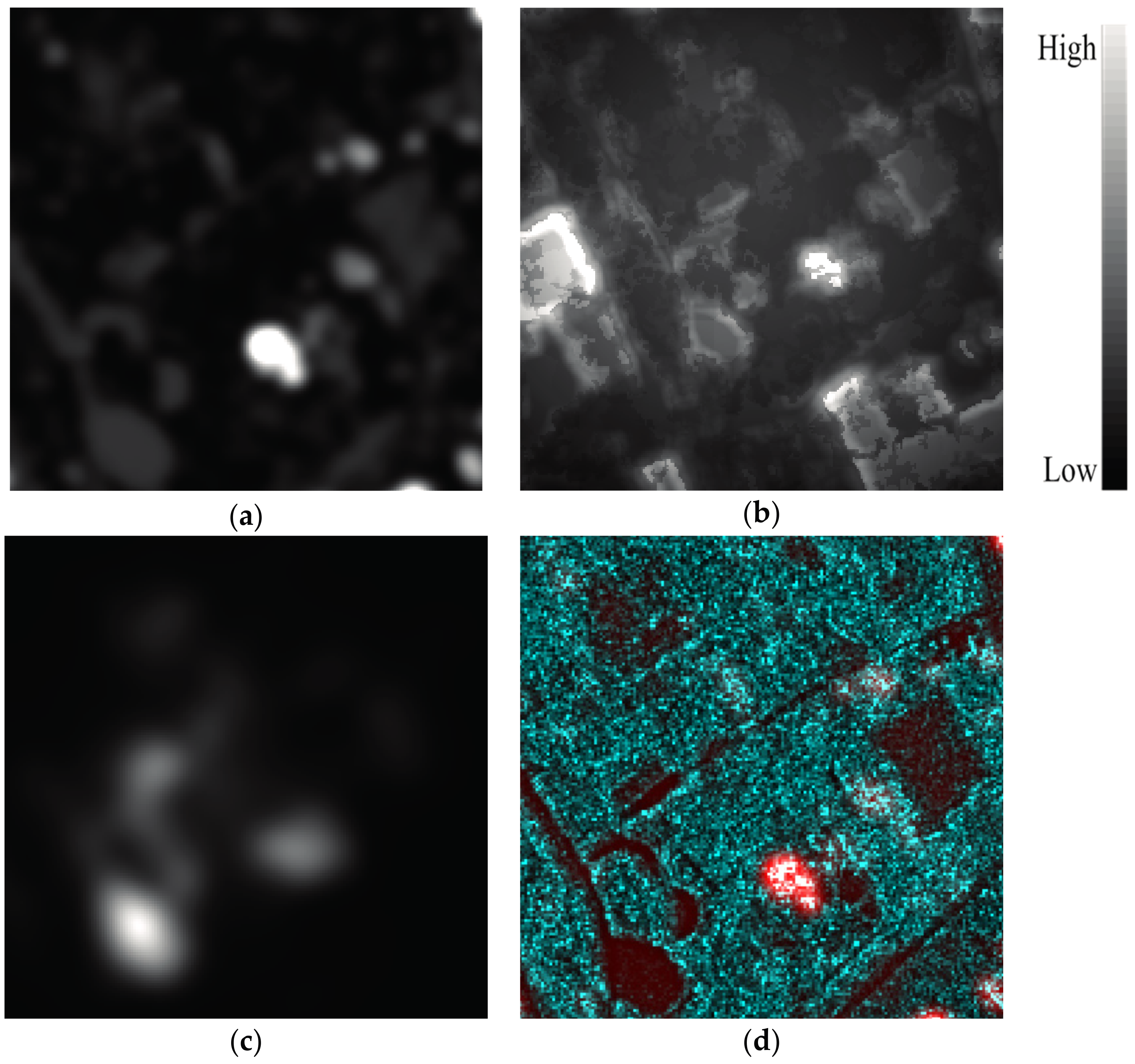
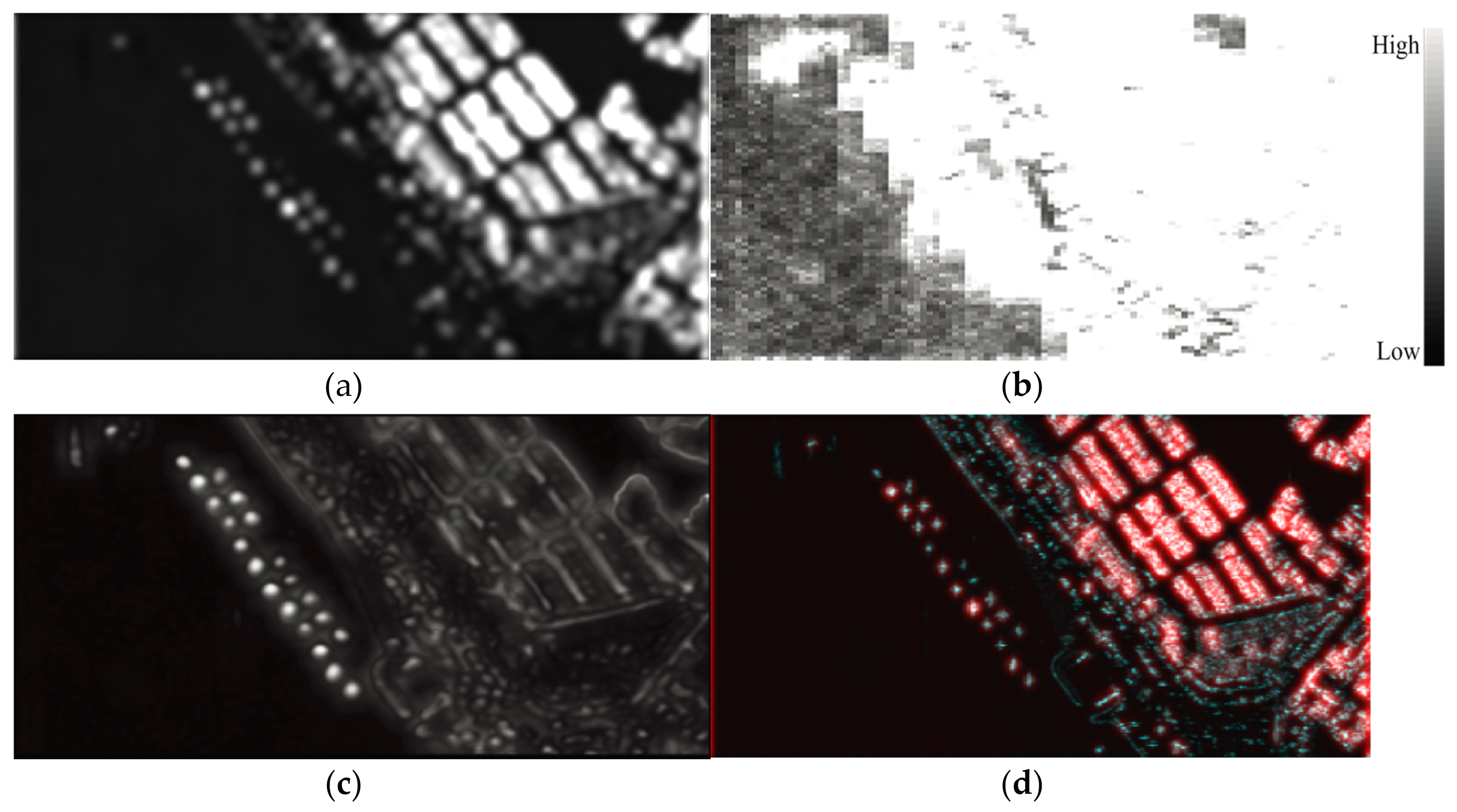
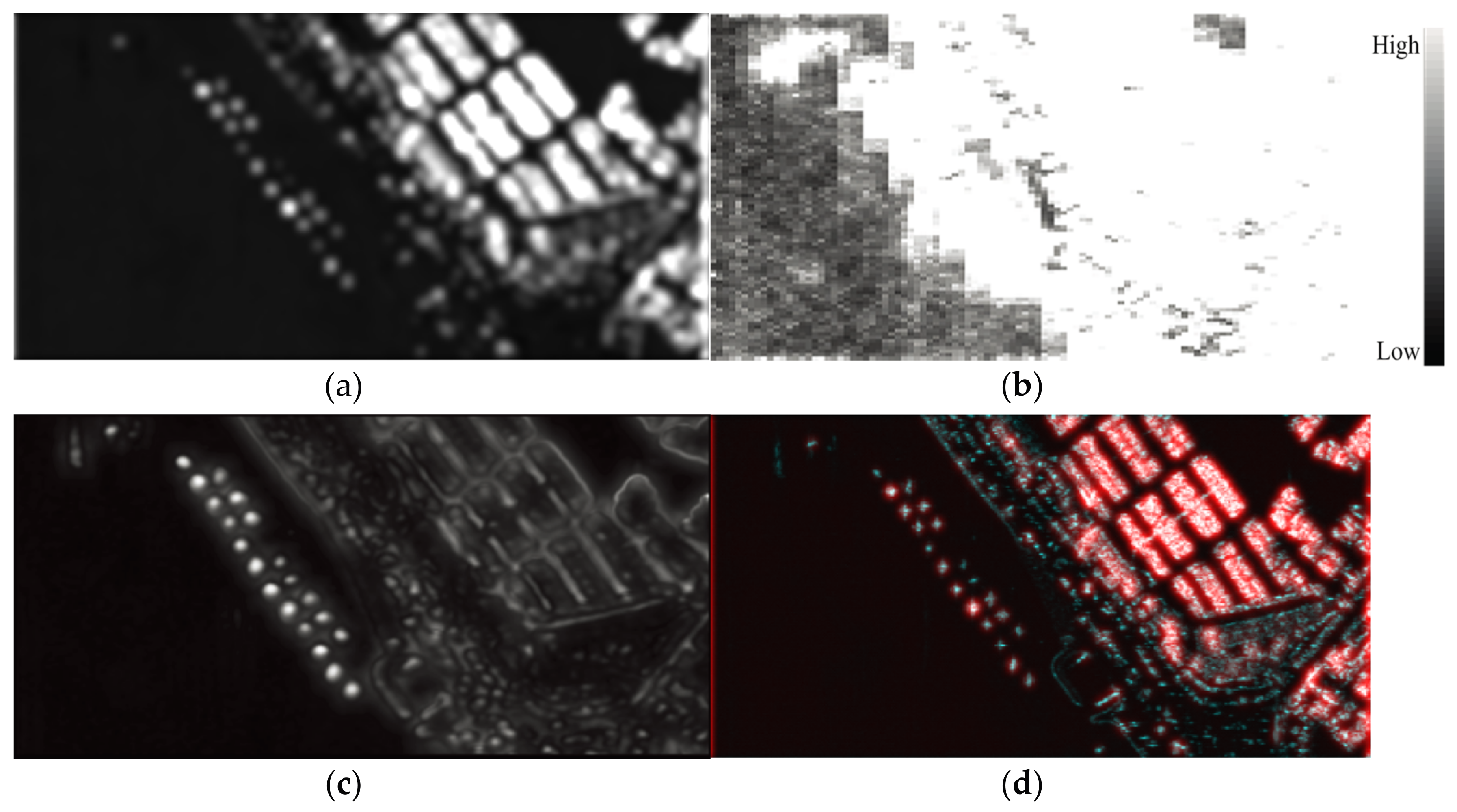
Figure 11a–c show the saliency maps of the three methods, respectively.
Figure 11d overlays the proposed detection result on the span image, where the red regions denote the salient targets. What we can see from
Figure 11a,d is that our proposed method can obtain most of the salient targets, including the isolated and assembled boats. In addition, the buildings inside the harbor can also be effectively highlighted. The saliency of the background areas is suppressed very well, which makes the saliency map smooth and clear. Nevertheless, some small targets have relatively low saliency values, making them difficult to be measured. The reason is that the target sizes are smaller than the minimal target region size, leading to saliency measure omissions of the targets. In
Figure 11b, we can find that the result of the SDPolSAR method is not satisfactory. The resolution of the saliency map is bad, and the salient targets cannot be clearly discriminated. Furthermore, the saliency of the background is not suppressed well. Therefore, this method is not very effective for the saliency map generation from the complex heterogeneous image scenes. From
Figure 11c, it can be seen that the result of the PRSaliency method is fine, where the isolated boats can be well detected. In addition, the saliency of the background is also suppressed. However, this method cannot measure the saliency of the assembled boats and buildings, making the result worse than our proposed method. From the comparison of these methods, it can be found that the proposed approach can well highlight the salient targets from the PolSAR image with a complex heterogeneous background. The targets exhibit higher saliency than the backgrounds, and also can be clearly discriminated from each other.
4.4. Performance Evaluation and Comparison
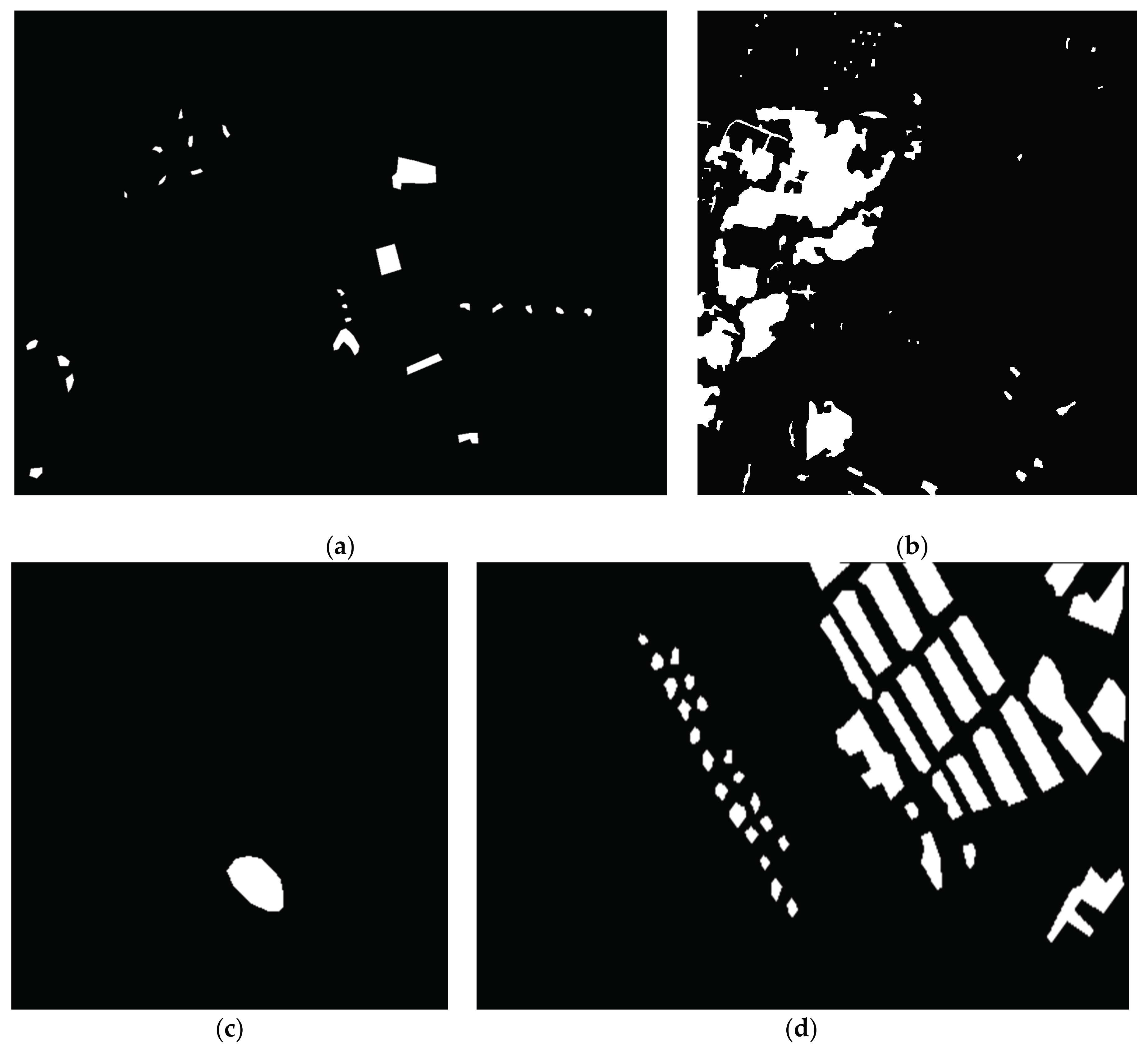
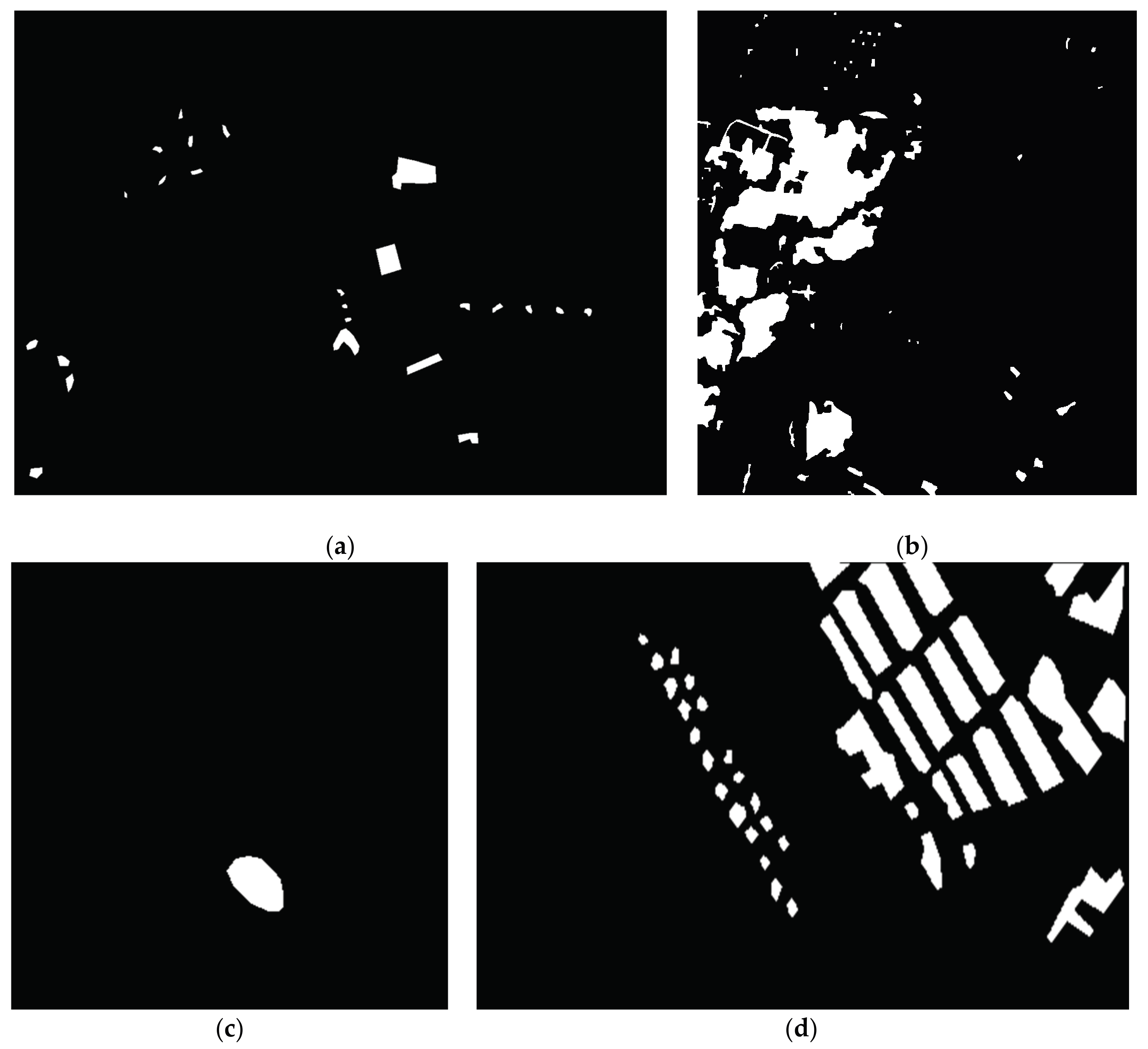
There are few studies that focus on quantitative evaluation indicators for saliency map generation. As we stated in the Introduction section, saliency is a measure of prominent characteristics that can be used to discriminate targets from backgrounds. Therefore, our proposed approach can be extended to salient target detection for SAR and PolSAR images, and the detection accuracy analysis can be used to evaluate the performance of the saliency map. It is worth pointing out that the saliency map also can be used in other applications, such as the image segmentation. Therefore, the evaluation indicators for image segmentation also can be used to measure the saliency map generation performance. Since this work starts from the target detection application and further proposes saliency map generation methods for SAR and PolSAR images, we adopt the target detection accuracy measures to quantitatively evaluate the saliency map generation performance of different methods. Salient targets can be detected by simply thresholding the saliency map. In this paper, we set the threshold to 0.7 for simplicity. To quantitatively evaluate the performance of different saliency map generation methods, we compare the target detection results using various saliency maps with respect to human-annotated “ground truth”.
Figure 12 gives the ground truth maps of salient target detection using above four datasets respectively, which are all annotated with human eye observation.
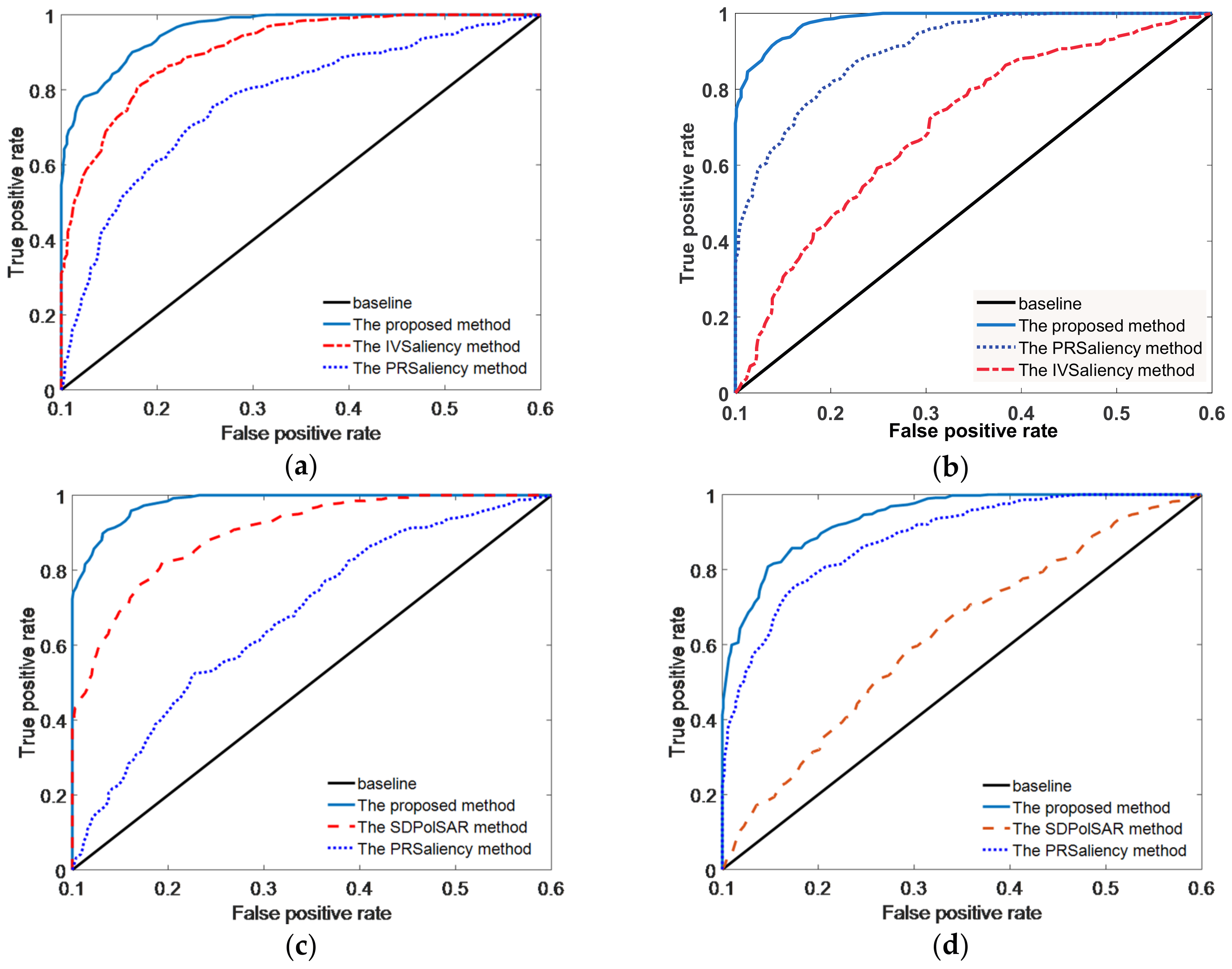
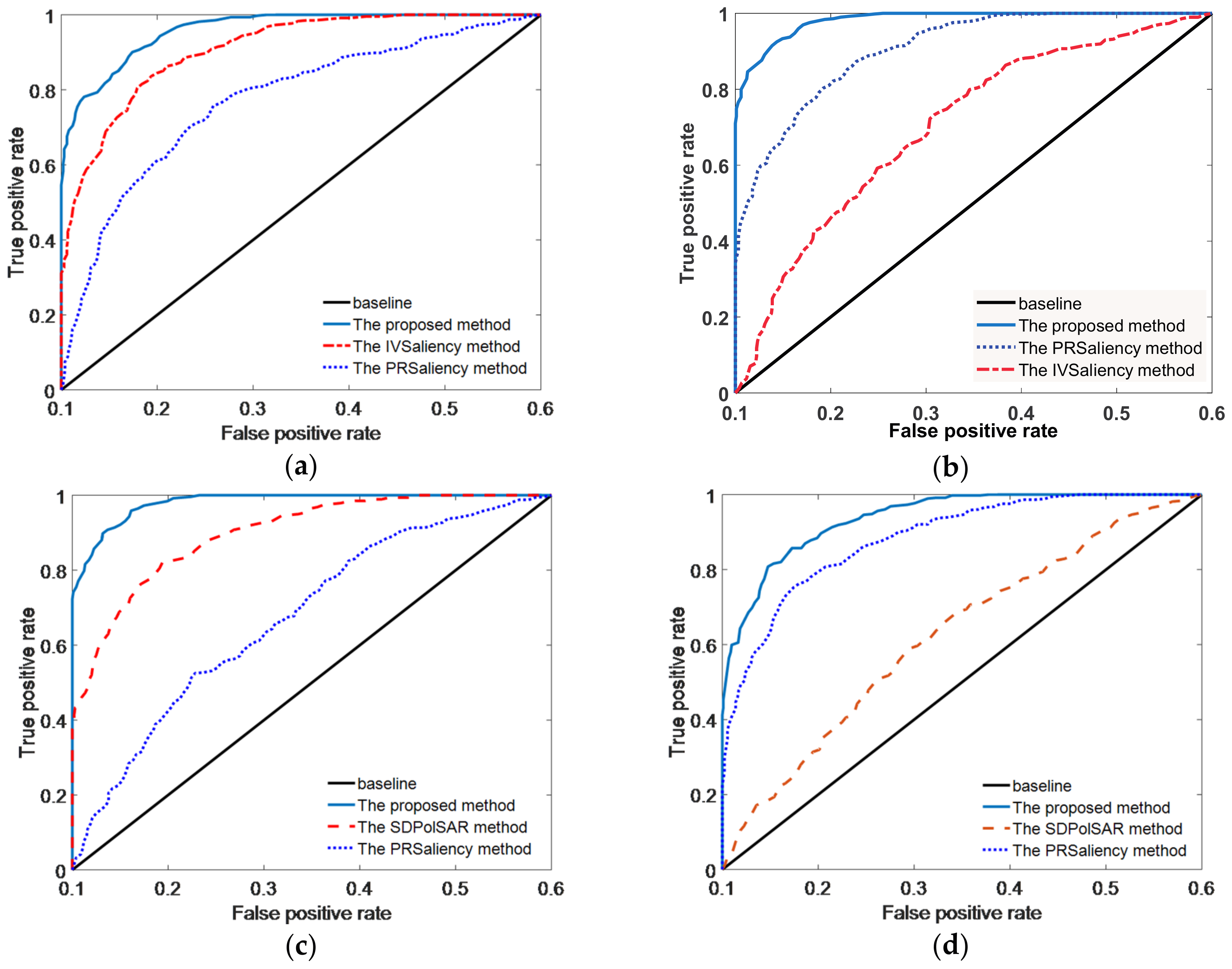
Figure 13 depicts the receiver operating characteristic (ROC) curves of different methods using four datasets. An ROC graph depicts relative tradeoffs between benefits (true positives) and costs (false positives). Methods on the upper left-hand side of an ROC graph are generally regarded as excellent. From the four ROC graphs depicted in
Figure 13, we find that our proposed method can achieve the best salient target detection performance in both SAR and PolSAR images among different approaches. For the sake of further comparison, the AUCs (i.e., areas under the curve of ROC, the higher the AUC, the better the detector) of different methods are given in
Table 1. The method has a better saliency detection performance if its AUC is close to one.
From
Figure 13 and
Table 1, we can find that the IVSaliency method can achieve a satisfactory result with the X band SAR image compared to the proposed approach. However, it cannot perform so well with the Sentinel-1 C band SAR image. In addition, it cannot be applicable to the PolSAR images. The PRSaliency method can be applied to both single-polarization SAR images and PolSAR images. It performs well in the UAVSAR L band image, but is not satisfactory in the X band and C band SAR images, and the Radarsat-2 C band PolSAR image. Therefore, it can be stated that this method is suitable for saliency map generation in the PolSAR image with a relatively complex background. The performance of the SDPolSAR method is comparable with other methods in the saliency map generation of the PolSAR image with a uniform background (e.g., Radarsat-2 C band image). Nevertheless, it performs much worse than the other methods in the PolSAR image with a complex heterogeneous background (UAVSAR L band image). It can be found that the proposed saliency map generation method performs well both with single-polarization SAR images and PolSAR images. Furthermore, the generated saliency maps are satisfactory with and without the complex background. The saliency map accuracy can achieve above 95% with four datasets, which is about 5–20% higher than other methods.
Table 2 gives the time costs of saliency map generation using different methods. All of the experiments are implemented using MATLAB language on a laptop with an Intel Core i7-6700HQ CPU with frequency of 2.6 GHz and 32-GB RAM. The sizes of the X-band SAR, Sentinel-1 C-band, Radarsat-2 C-band, and UAVSAR L-band images are 300 × 500, 800 × 700, 300 × 300, and 250 × 600, respectively. From
Table 2, we can see that the computational cost of our proposed approach is higher than other methods. The time cost mainly comes from the parameter estimation of PDFs. The PRSaliency method runs fast among these methods, thanks to the quick computation of the pattern recurrence. Note that although our method can achieve satisfactory saliency map generation results, the efficiency should be further improved in the future.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}