Comparing and Merging Observation Data from Ka-Band Cloud Radar, C-Band Frequency-Modulated Continuous Wave Radar and Ceilometer Systems


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data and Instrument Description
2.1.1. Cloud Radar (CR)
2.1.2. C-Band FMCW Radar (CVPR)
2.1.3. The Laser Ceilometers (CEIL)
2.1.4. The Microwave Radiometer
2.1.5. The Disdrometer
2.2. Methods
2.2.1. Simulation of Differences in Reflectivity and Velocity by CR and CVPR
2.2.2. Comparison of Observations from Radars and CEIL
2.2.3. Data Merging Algorithm for CR, CVPR and CEIL
- (i)
- Delete all noise data below a given SNR threshold of −12 dB for CR and −24 dB for CVPR and invalidate the data below the corresponding minimum detectable range.
- (ii)
- Sub-sample the CVPR observed reflectivity and velocity and the CEIL-derived cloud-base heights to fit the CR time-height grid. Temporal resolution of 9 s and a vertical resolution of 30 m are chosen for the present study. After obtaining the grid-point data in the time-height cross sections, the following procedures need to be performed:
- (iii)
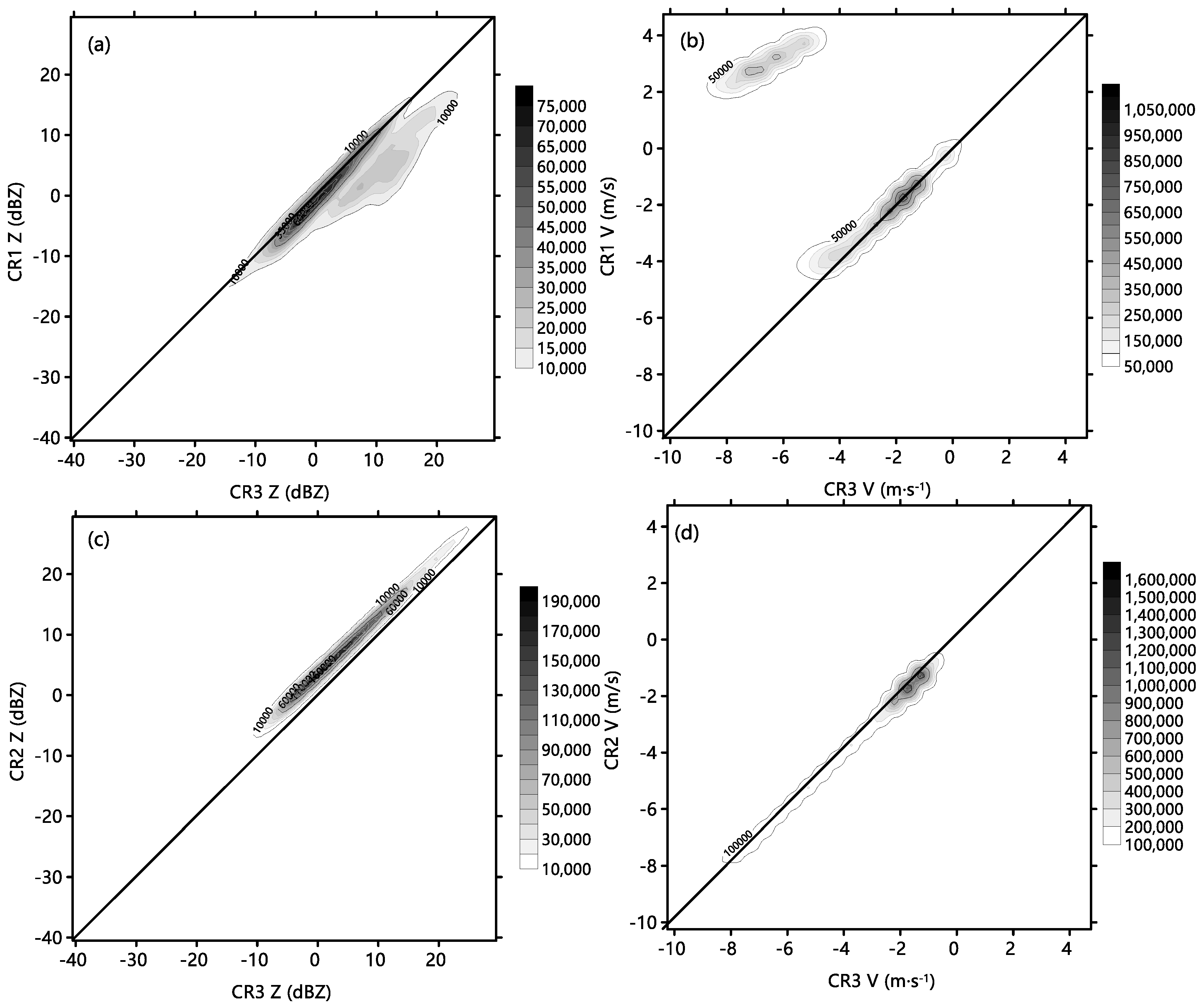
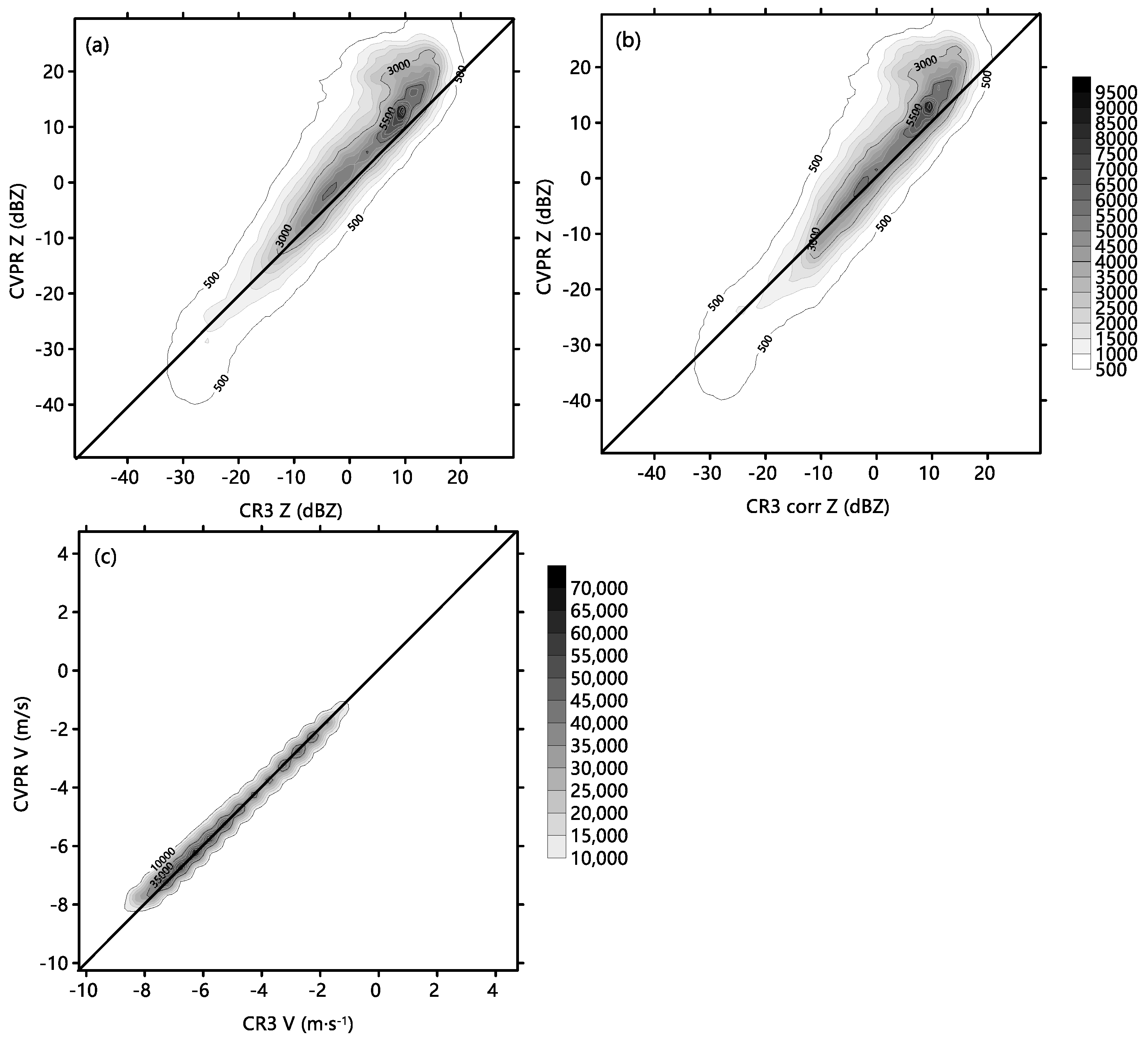
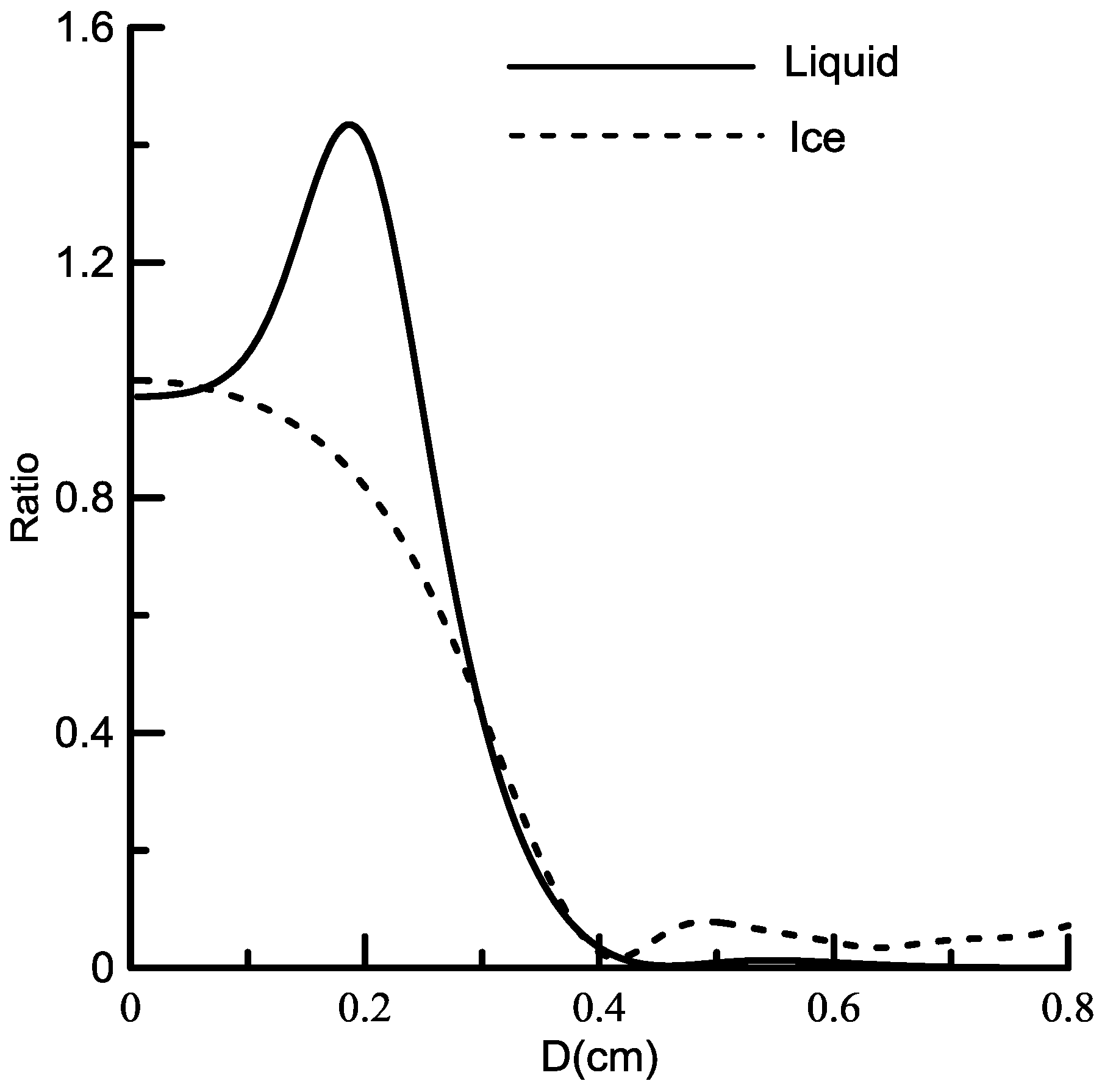
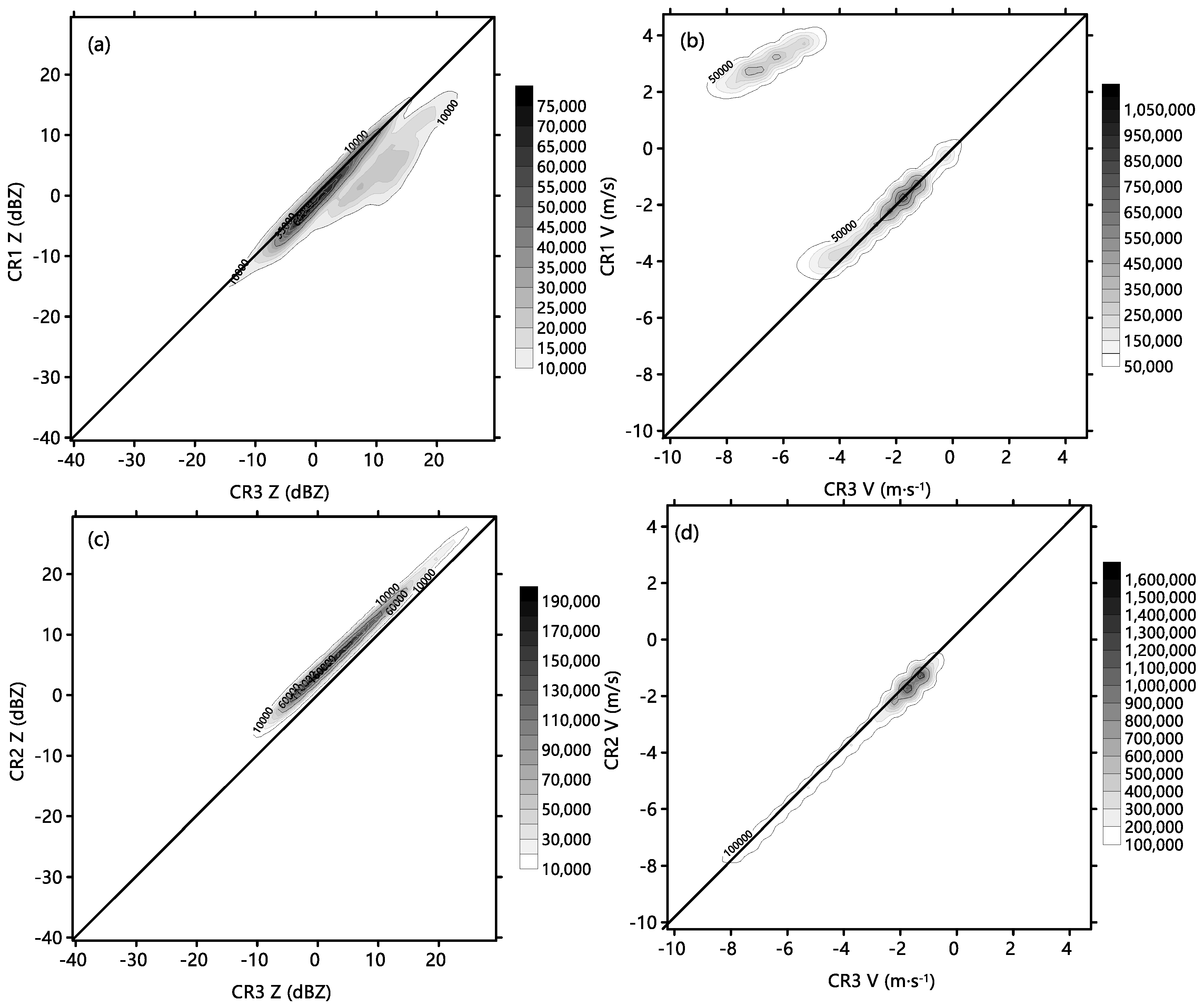
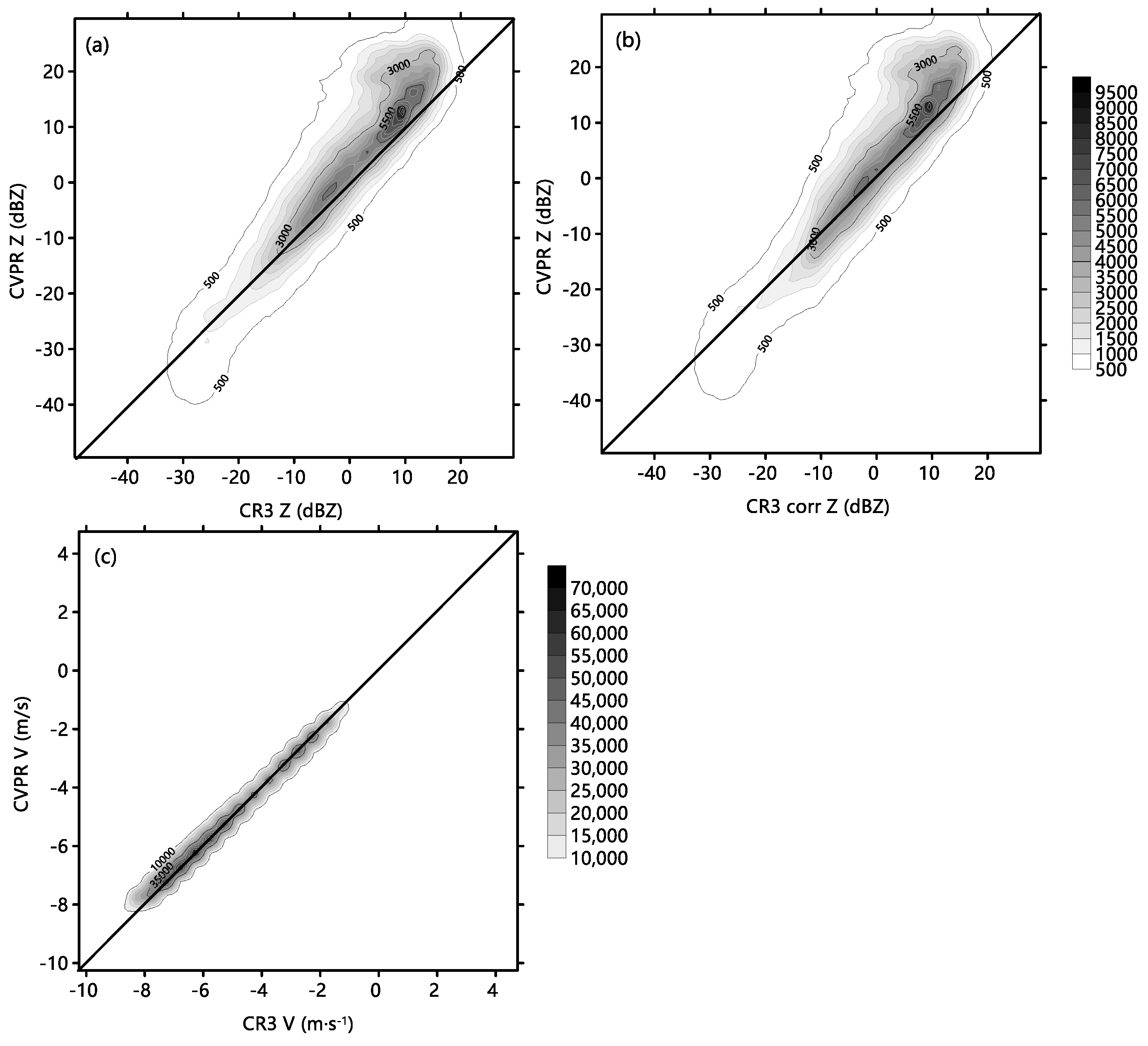
- Correct for difference of reflectivity between CR1, CR2 and CR3 modes, which are produced by different numbers of incoherent and coherent integrations. Using the following reflectivity difference analysis for CR modes, the reflectivity values obtained by the CR1 and CR2 mode are corrected (minus 2 dB from the CR2 observed reflectivity, plus 2 dB from the CR1 observed reflectivity). Then, attenuation correction of CR reflectivity is conducted. Corrected CR reflectivity is adjusted to reduce the difference between CR and CVPR due to Mie scattering, systemic bias between CR and CVPR by Equation (5).where ZKA is CR observed reflectivity after corrections for attenuation and systemic bias. In this study, Equation (5) was fitted by using corrected CR reflectivity and CVPR data taken from 1 to 31 July 2016.
- (iv)
- Vmax, SNR and over saturation of reflectivity are utilized as criteria to determine the valid data for use in the merged data set. The minimum detectable reflectivity plus the corresponding dynamic range of reflectivity can be regarded as the maximum detectable reflectivity. If the reflectivity obtained by the CR3 mode or CVPR is larger than the maximum reflectivity from the CR1 mode or CR2 mode, or if the CR3 or CVPR velocity exceeds the CR1 or CR2 Nyquist velocity, data from the CR1 mode or CR2 is marked as “invalid”.
- (v)
- CR1, CR2 and CR3 data points are merged into one “best” value using the Liu’s algorithm [21]. If there are two valid data from CR and CVPR in a grid, the data with larger reflectivity are chosen when the reflectivity difference is larger than 2 dB to reduce the attenuation effects on merged data, otherwise, if the reflectivity difference is not obvious, the data with finer velocity resolution are chosen to ensure velocity quality.
- (vi)
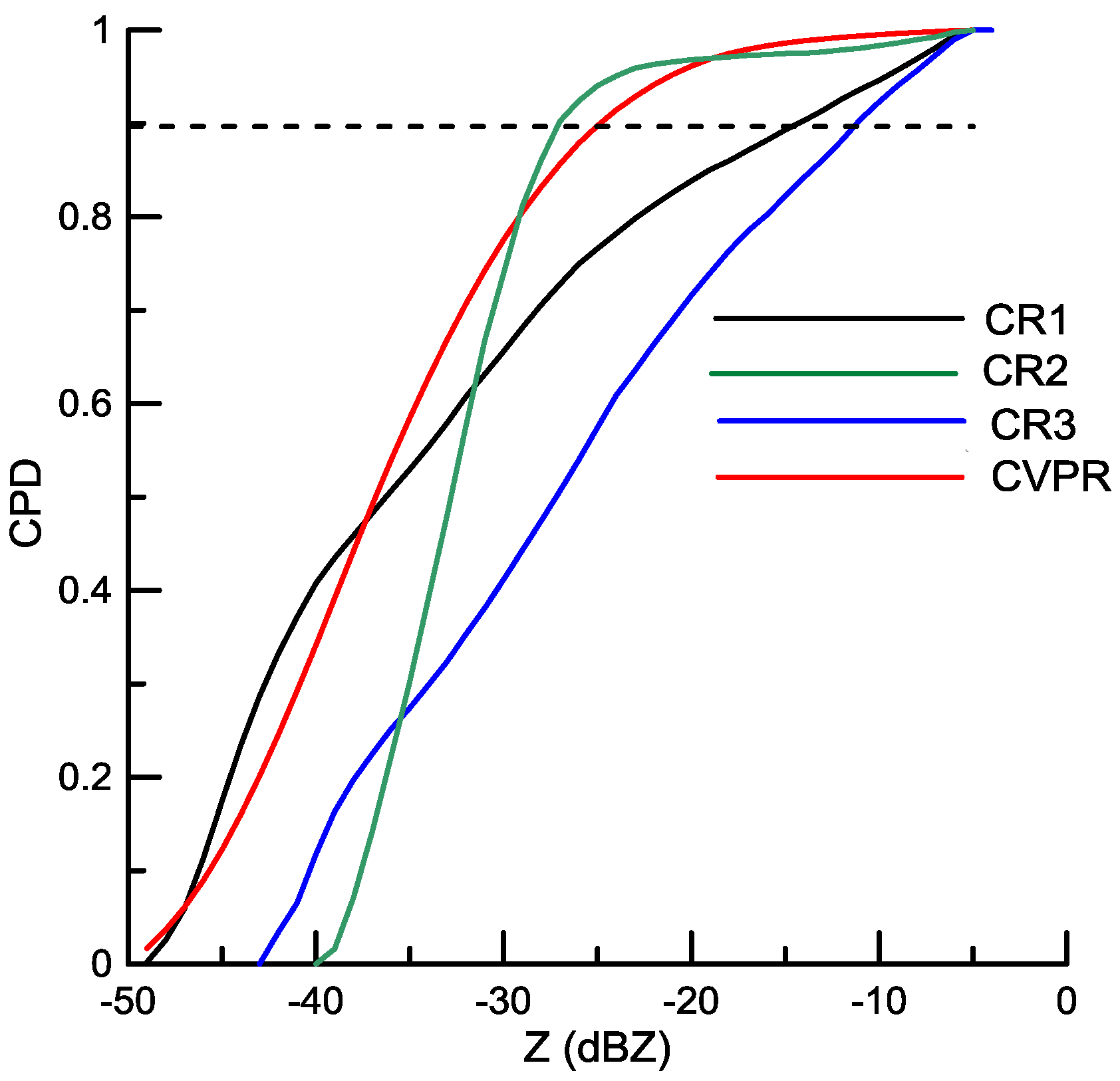
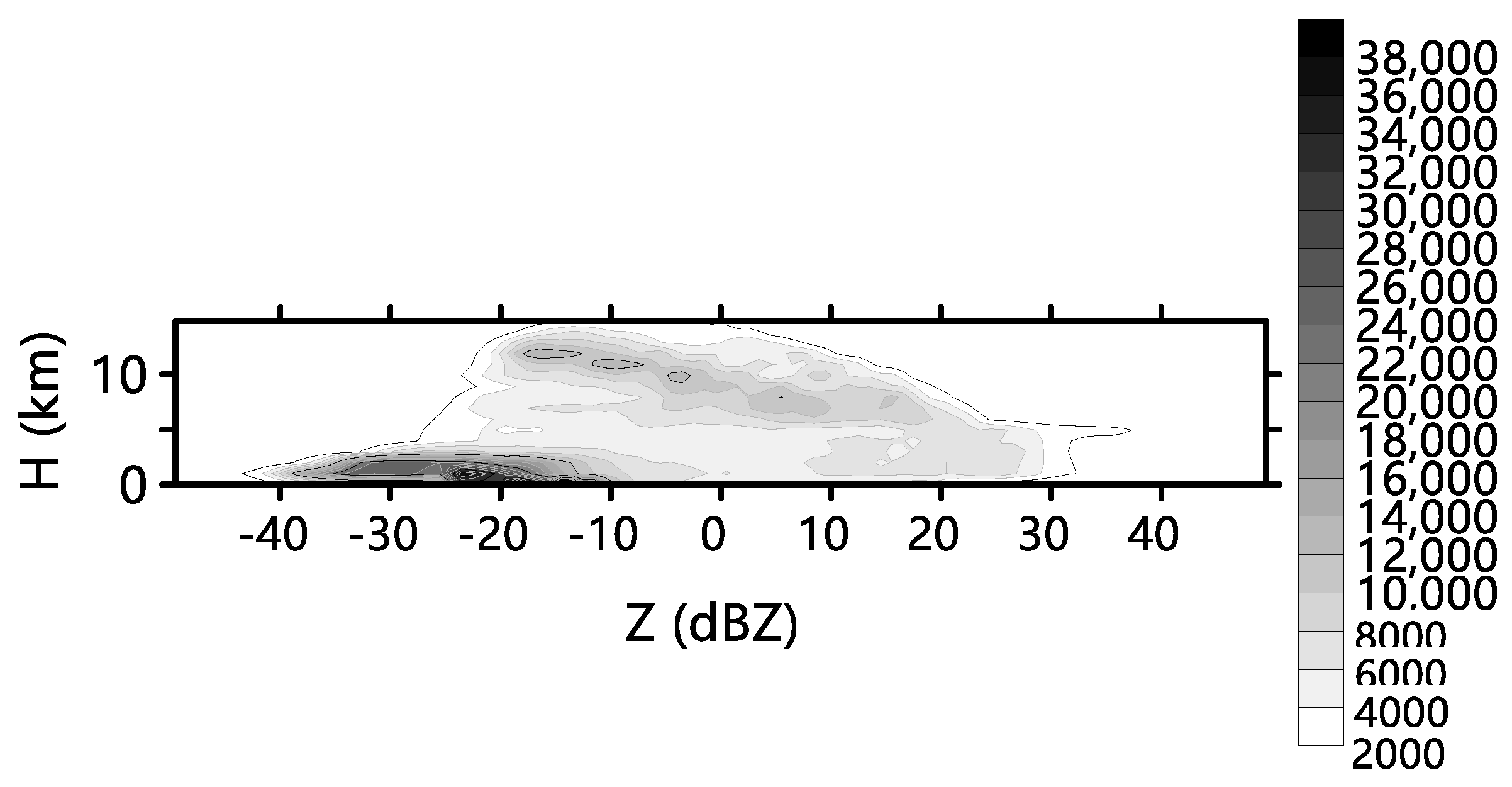
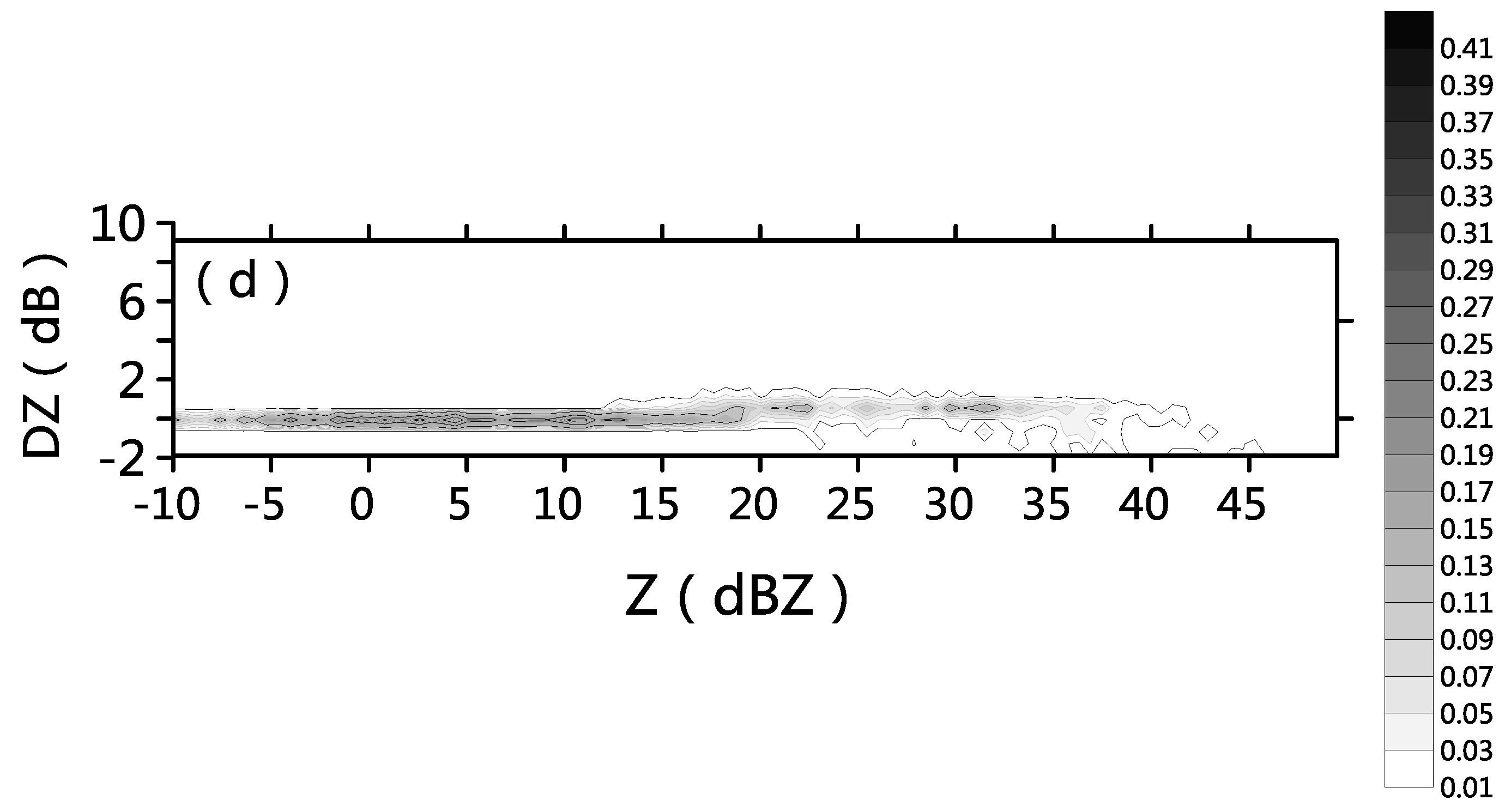
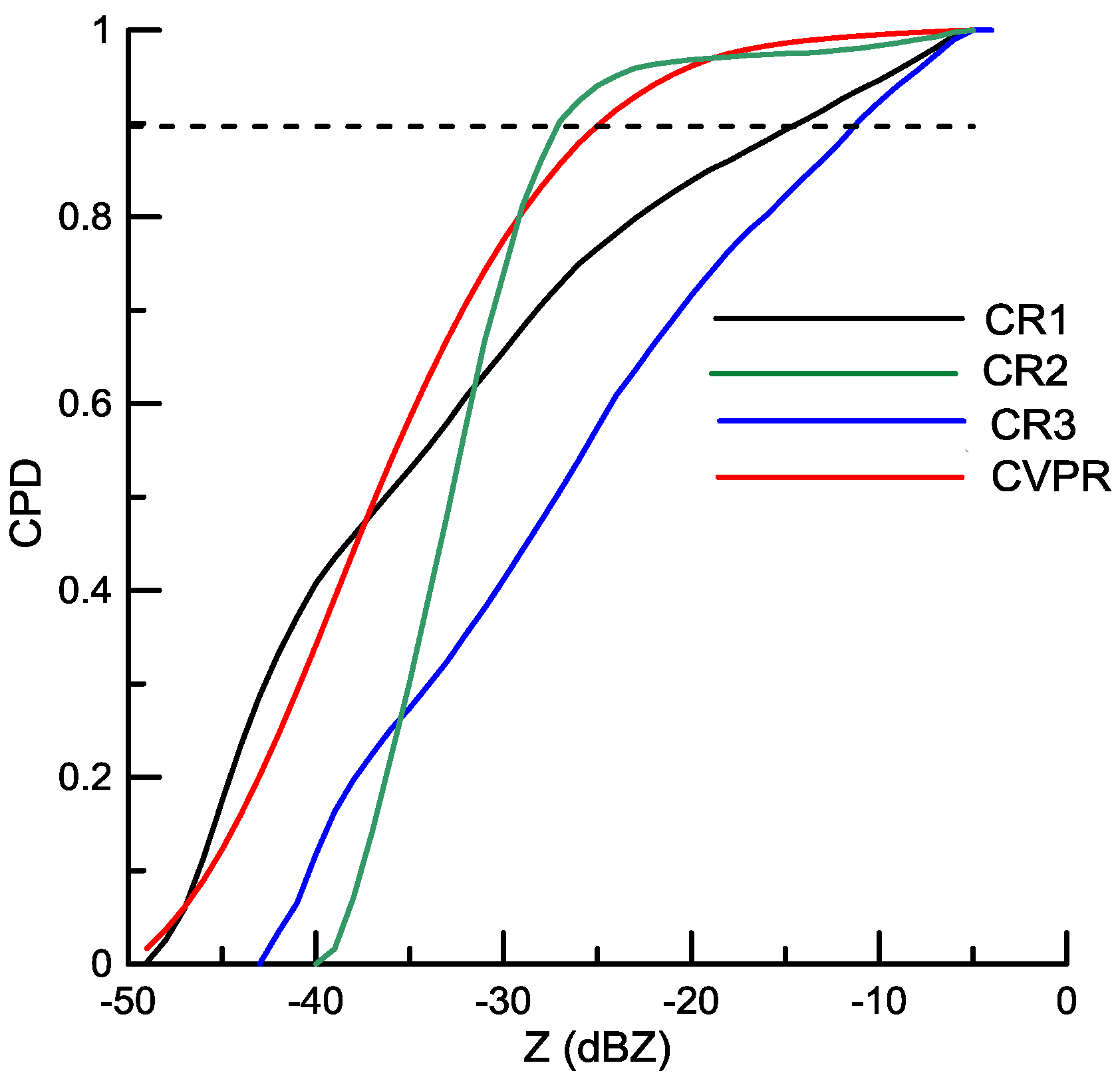
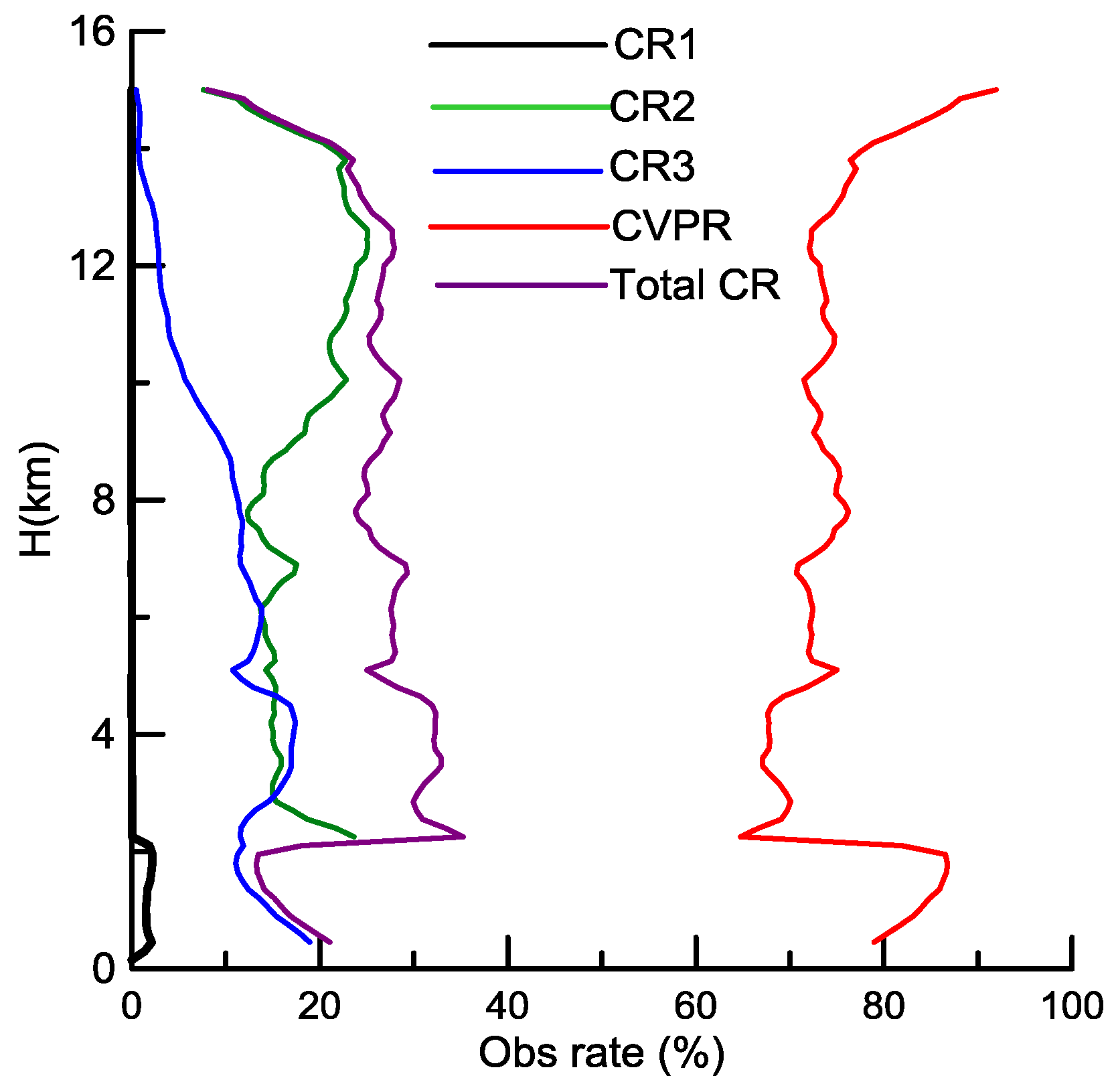
- The radar data was flagged for clutters (no clouds and precipitation echo, such as insects, dust, Bragg scatter and fog echoes below the CEIL-derived cloud-base heights) by using the CEIL data following closely the method proposed by Clothiaux assuming that the CEIL-derived cloud-base heights are accurate [4]. We also distinguish precipitation from clutter in each radar profile that appears below the CEIL-derived cloud base height using “clear-sky” radar profiles. In this paper, clutter means non-cloud and precipitation echo, such as ground clutter, insect, dust, Bragg scatter and fogs echoes below the CEIL-derived cloud-base heights. Reflectivity during the period with the absence of significant radar returns above the CEIL-derived cloud-base heights were detected as “clear-sky” radar profiles. The “clear-sky” radar data taken during 1–31 July 2016 were statistically analyzed to obtain the cumulative probability distribution of “clear sky” reflectivity by CR1, CR2, CR3 and CVPR as shown in Figure 2. CR1, CR2, CR3 and CVPR, respectively, detected 31,078, 6552, 16,684 and 269,885 “clear-sky” echo points. If 90% of “clear-sky” echo points are flagged as clutter, the reflectivity thresholds for identifying clutter in CR1, CR2, CR3 and CVPR data below the CEIL-derived cloud-base heights were set to −14, −27, −11.0 and −24 dBZ. If reflectivity below the CEIL-derived cloud base was lower than the threshold, the data was flagged as clutter. Finally, the source of each data was recorded (from either CR or CVPR).
3. Results
3.1. Comparison of Observations from Radars and CEIL
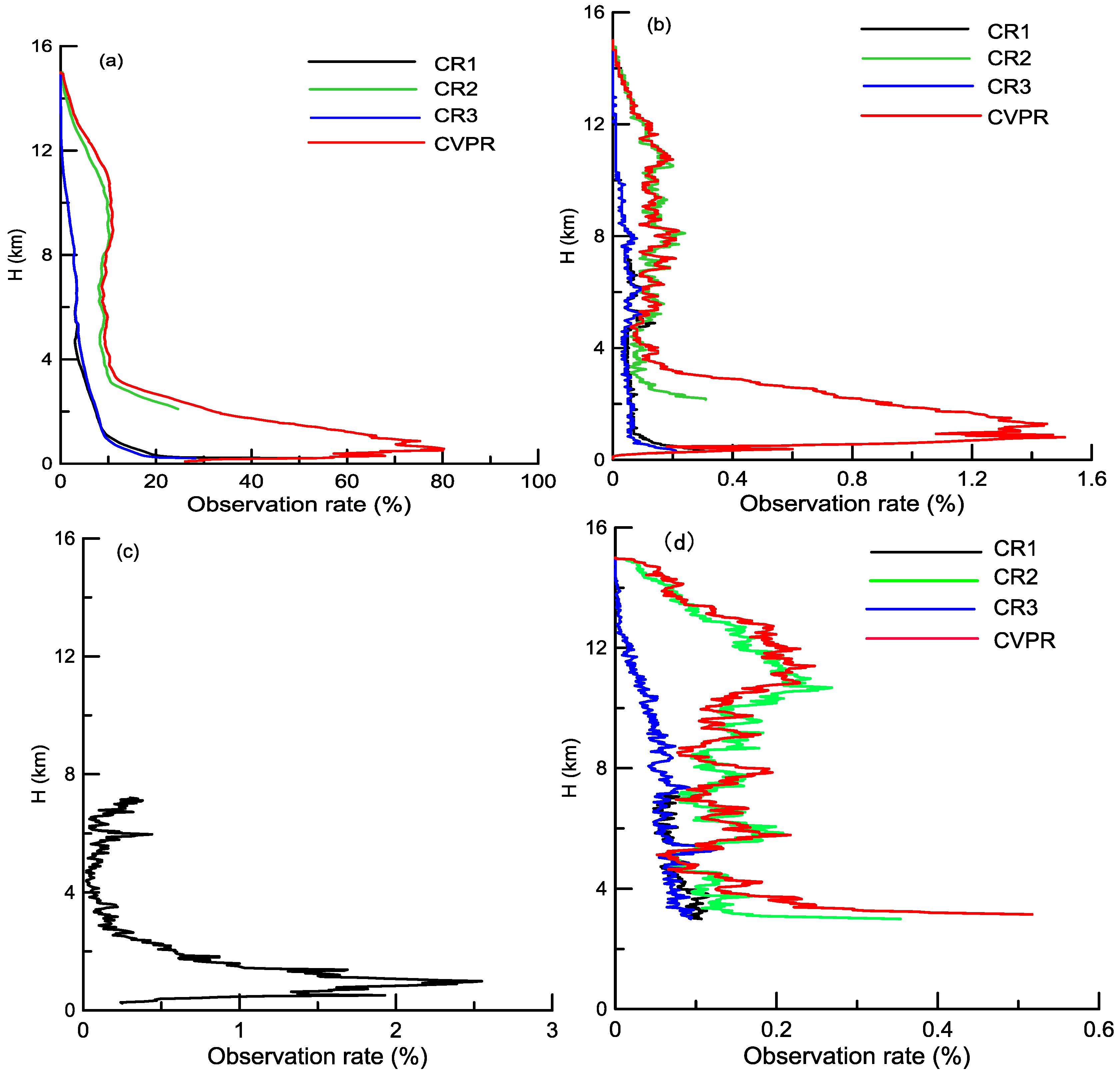
3.2. Evaluation of the Observation Capability of CR and CVPR
3.2.1. Consistency of CR Modes and CVPR Observations
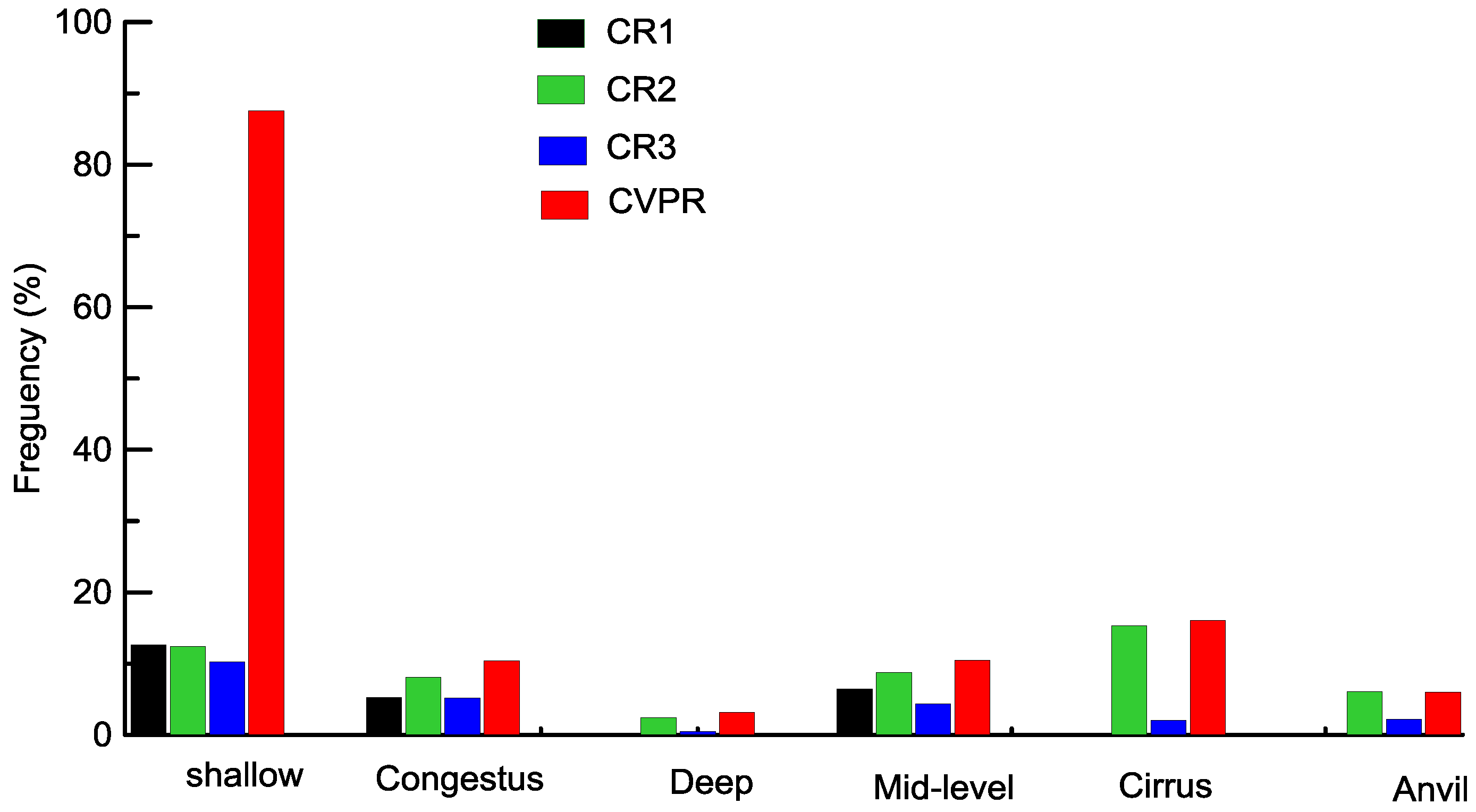
3.2.2. Hydrometeor Observation Statistics
3.3. Quantitative Assessment of the Merged Cloud-Precipitation Data
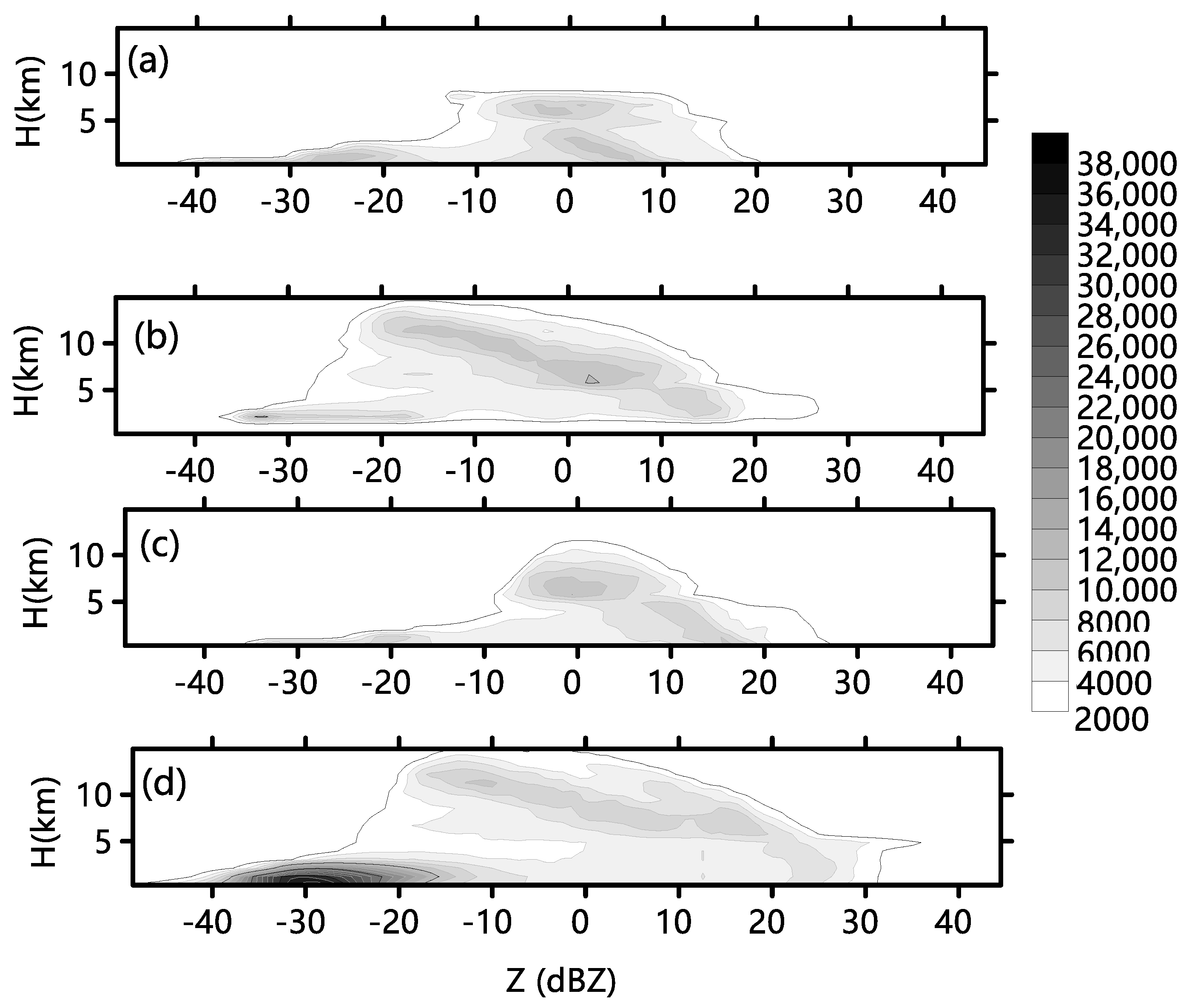
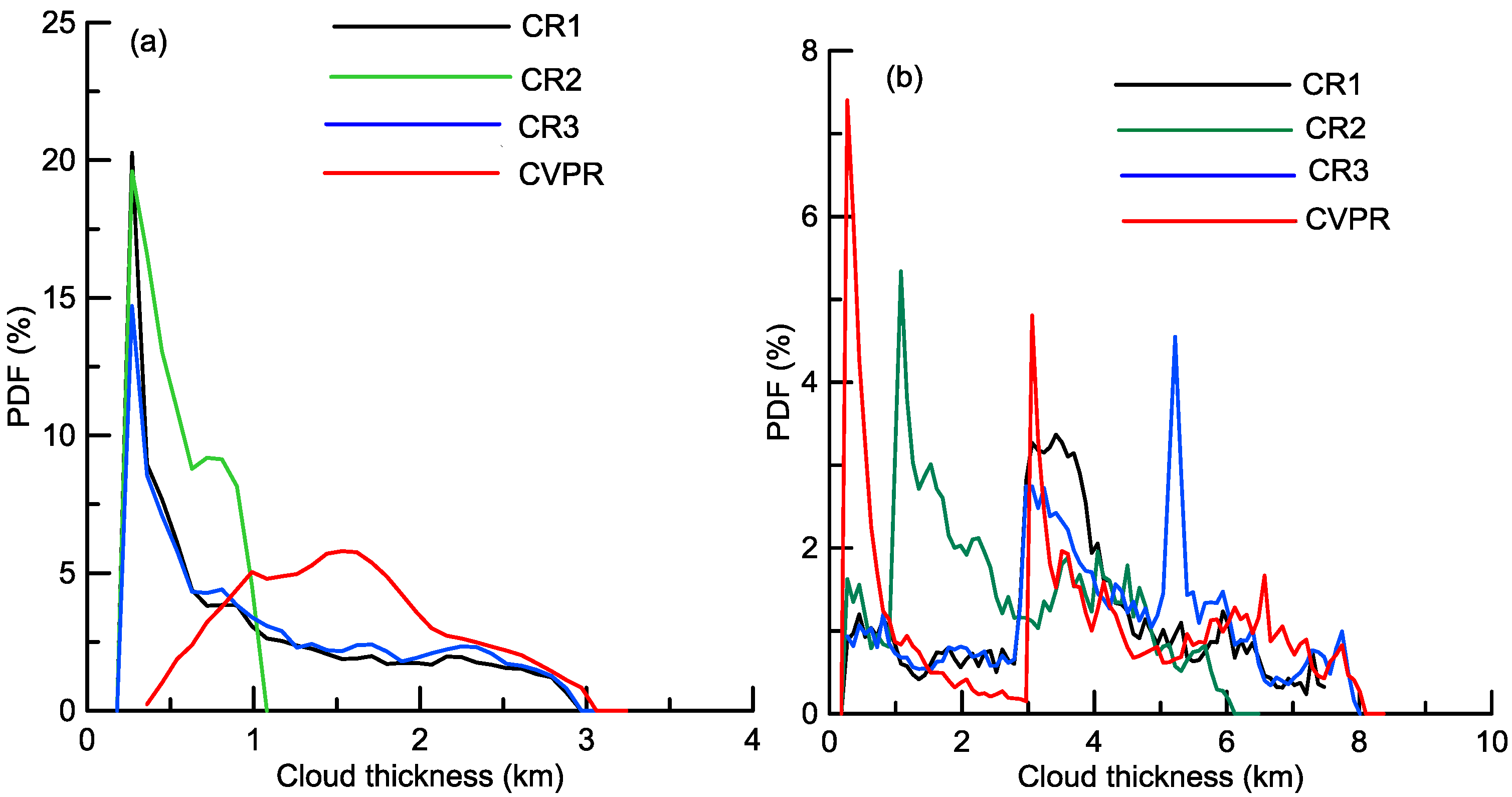
3.4. A Statistical Analysis of Merged Cloud and Precipitation Data
4. Discussion
5. Conclusions
- (i)
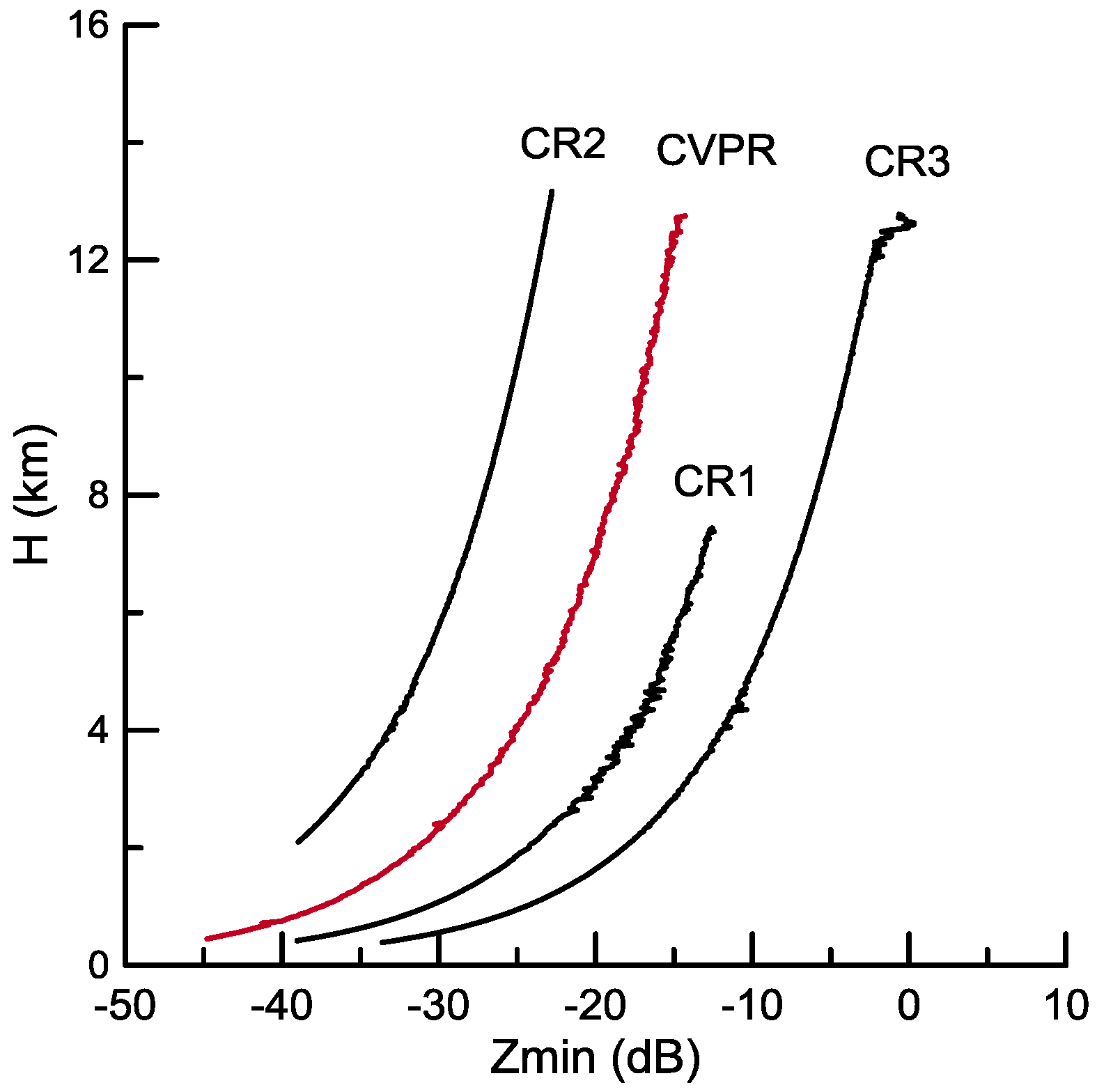
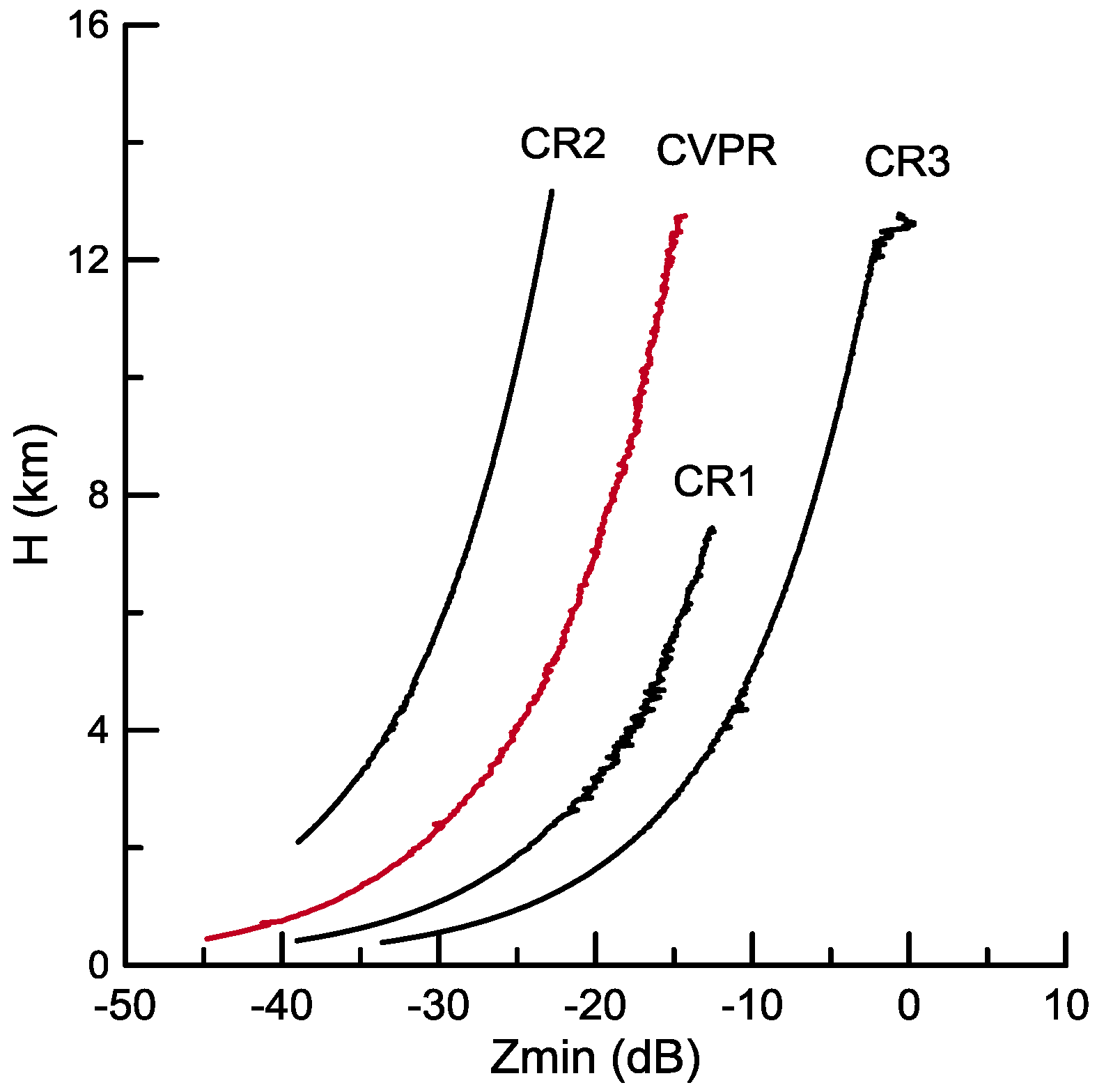
- The cloud radar with a solid-state transmitter used three operational modes with different pulse widths and coherent and incoherent integrations and realized the minimum detectable reflectivity of −35 dBZ at 5 km and a minimum detection range of 0.2 km. The pulse compression and coherent and incoherent integration in CR1 and CR2 mode can effectively improve the detection ability and introduce reflectivity biases less than 2 dB. The CVPR working in FMCW mode, with two antennas and two-dimensional FFT signal processing technology improved the observation sensitivity. The averaged difference between the attenuation-corrected CR3 and CVPR measurements is reduced to 3.57 dB from the original 4.82 dB. There is no obvious reflectivity bias between CR3 and CVPR (less than 2 dB) for reflectivity weaker than 0 dBZ.
- (ii)
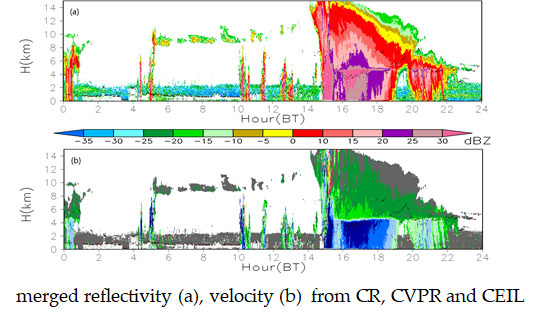
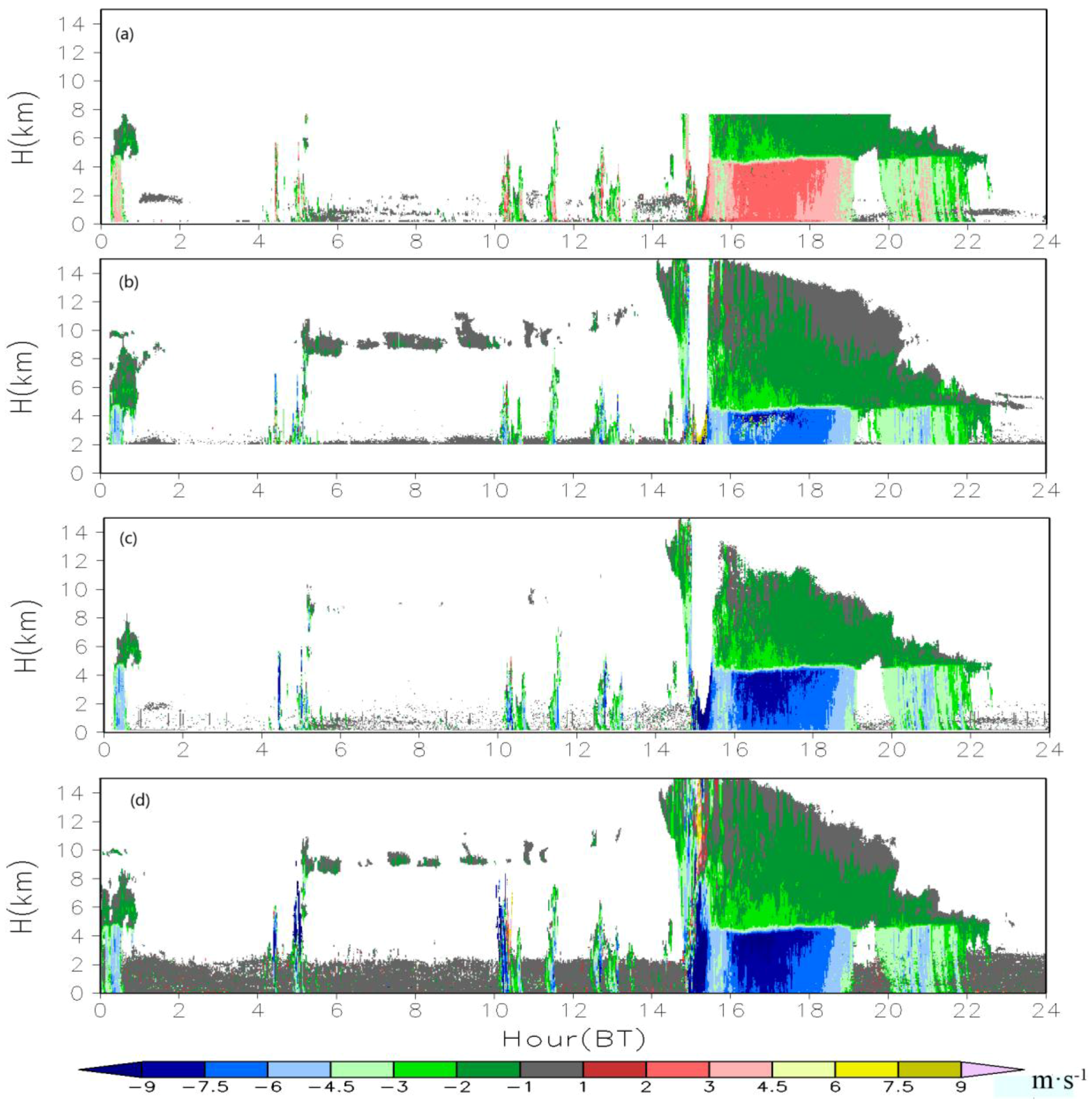
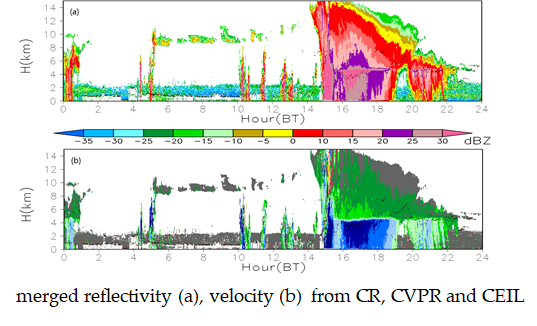
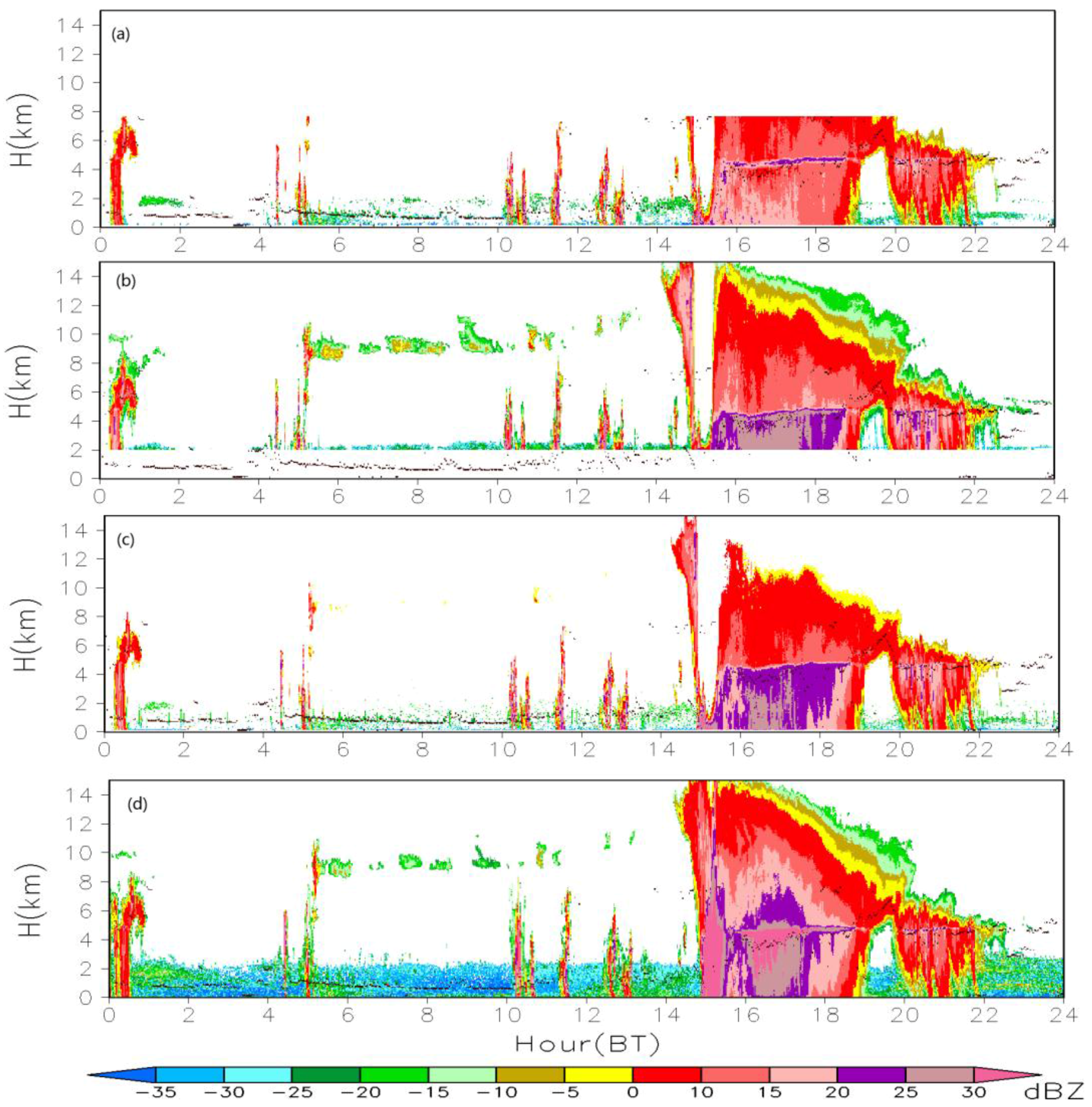
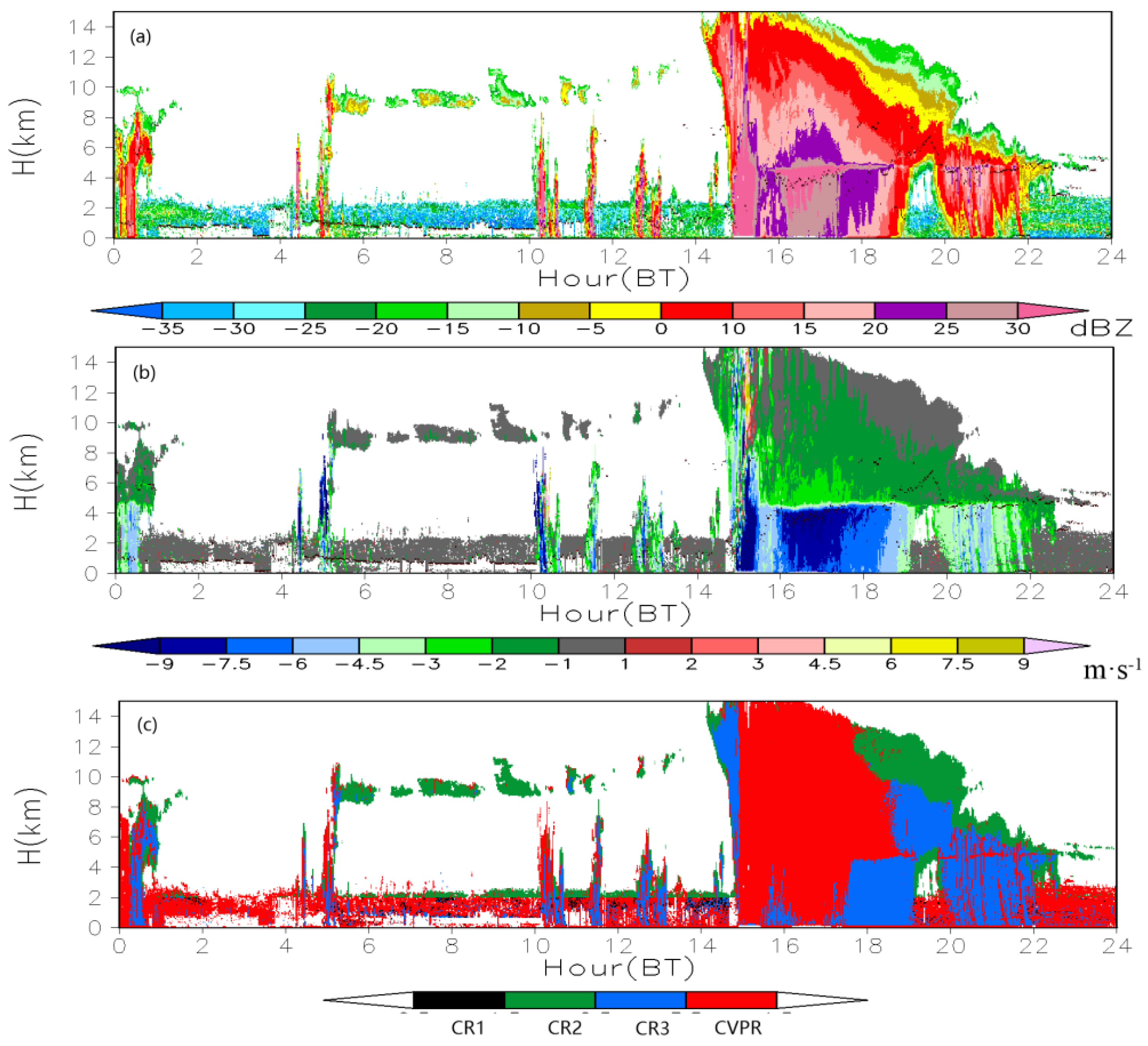
- The merging CVPR and CEIL data to CR data is to supplement CR deficiency and improve its cloud detection capability for deep cloud. The merged CR, CVPR and CEIL data provides a more complete time-height evolution of the reflectivity and velocity profiles of cloud and precipitation systems, which can fill in the gaps from CR measurements during periods of heavy precipitating and improve CVPR measurements in the boundary layer. At same time, the merging of velocity data with different Nyquist velocities and resolutions diminishes velocity folding, providing more fine information about cloud and precipitation dynamics. This merged dataset can be used to improve our understanding of the microphysical properties and dynamics of cloud and precipitation systems.
- (iii)
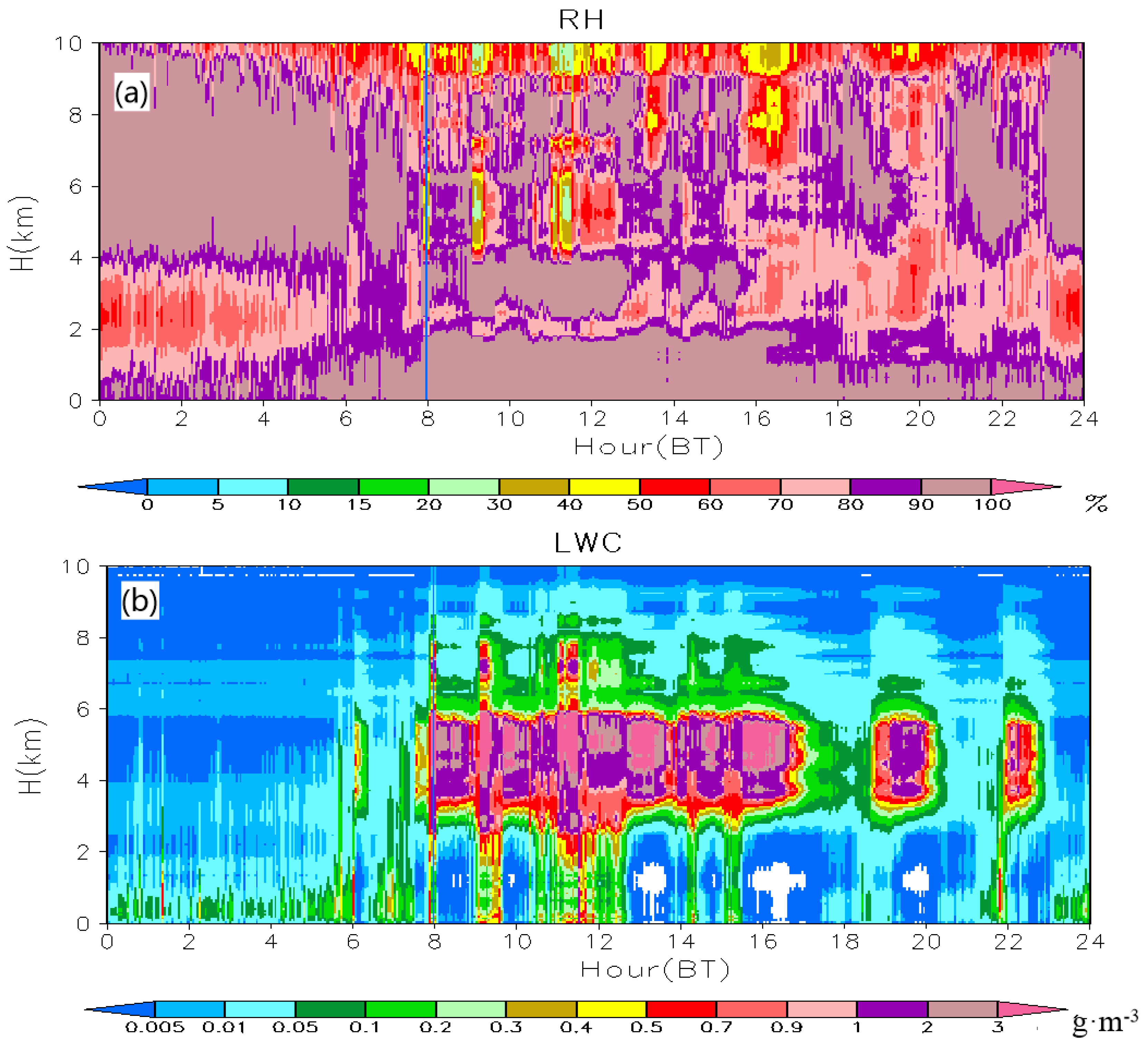
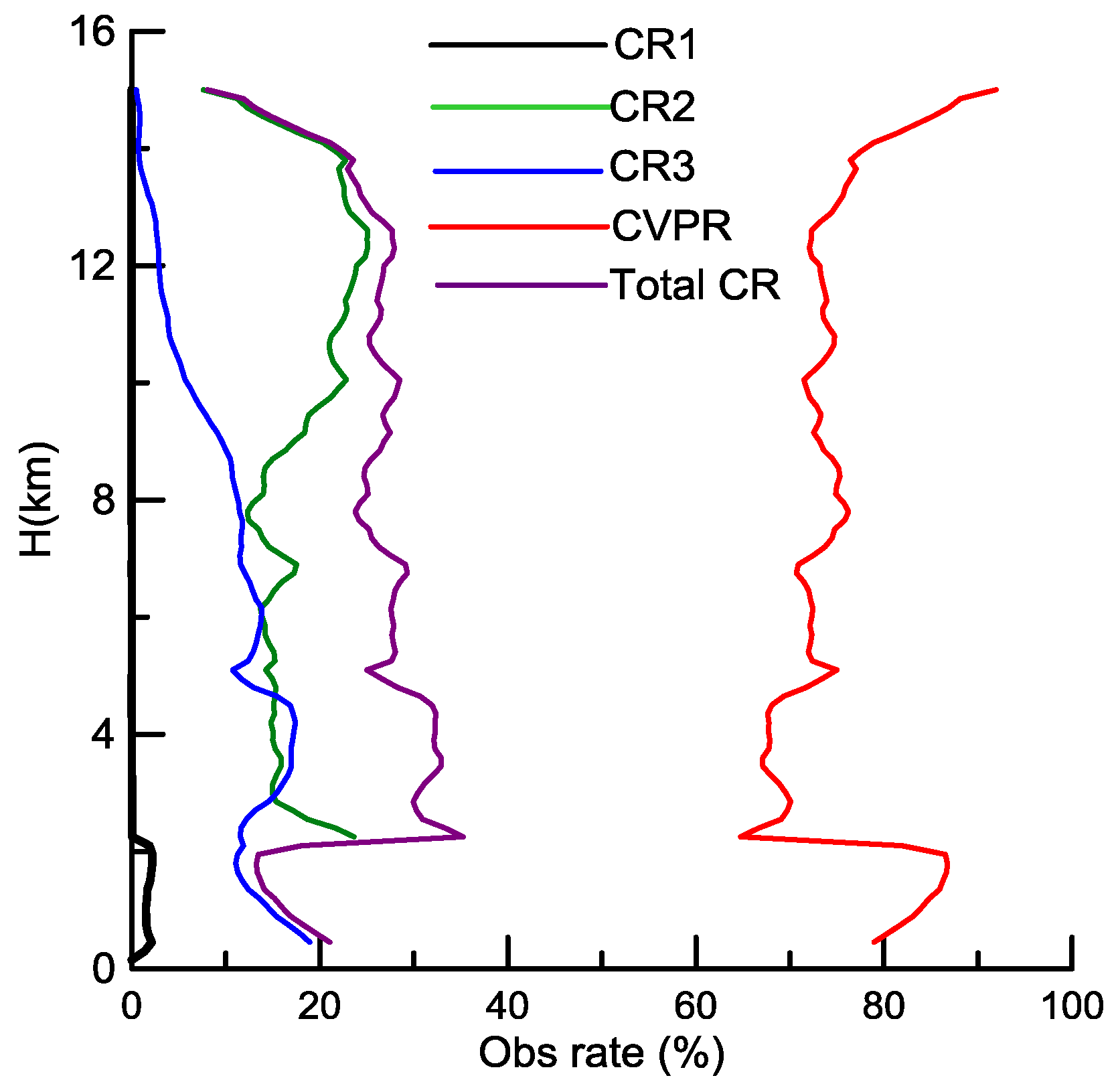
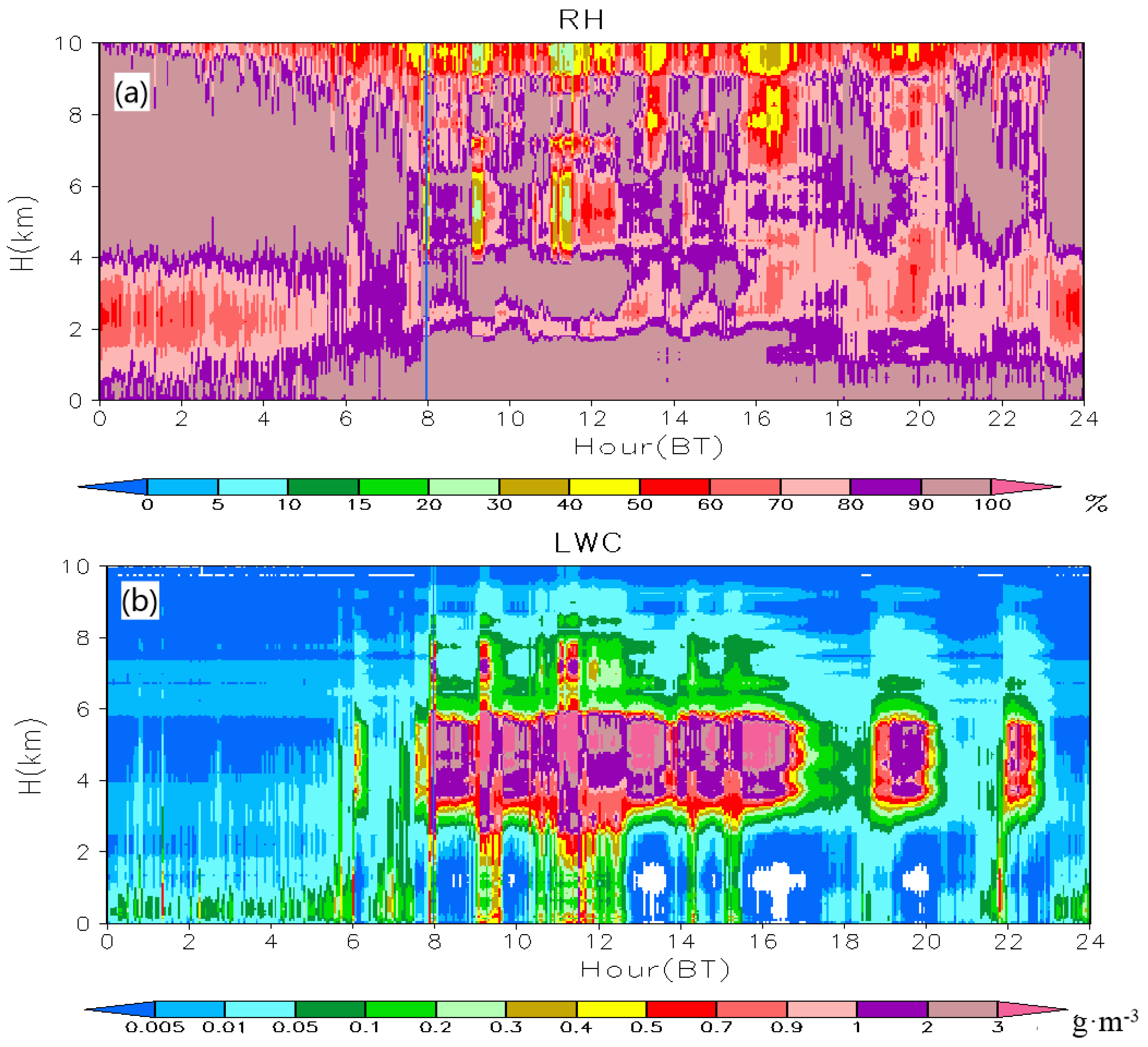
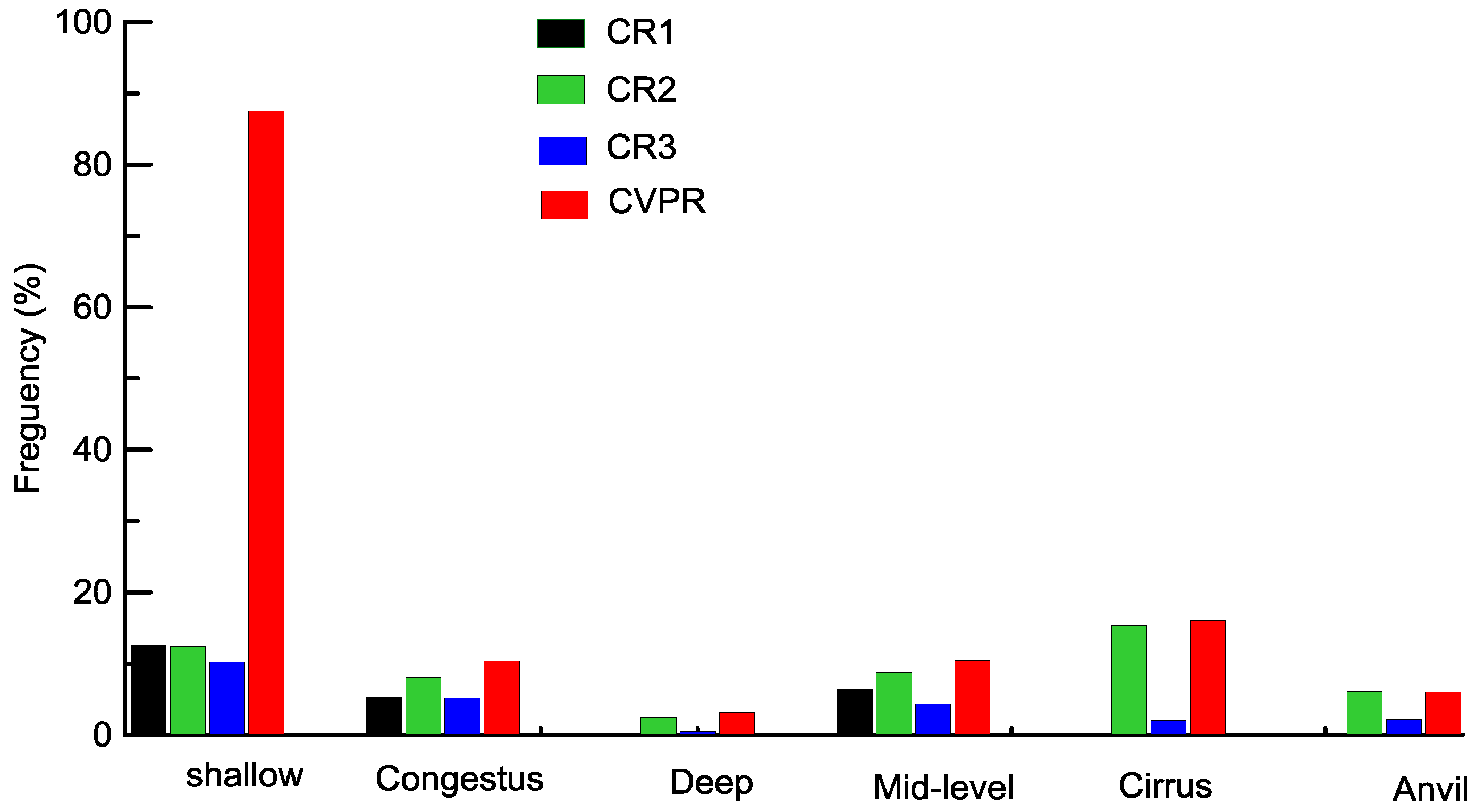
- Echoes in PLB observed by CVPR and CR1 correspond to RH more than 80% and valid LWC. These facts suggest that when cloud or fog are in PBL, Bragg scattering and the high sensitivity of the CVPR made it detect more echoes. In this case, comparison with CEIL, CR and CVPR failed to detect cloud in PBL. On the contrary, CR2 and CVPR observed similar cloud occurrences above 4 km and their echo base distributions are similar to those from CEIL. CVPR, CR2 and CEIL therefore have similar observation capabilities for mid-level and high-level non-precipitating clouds.
- (iv)
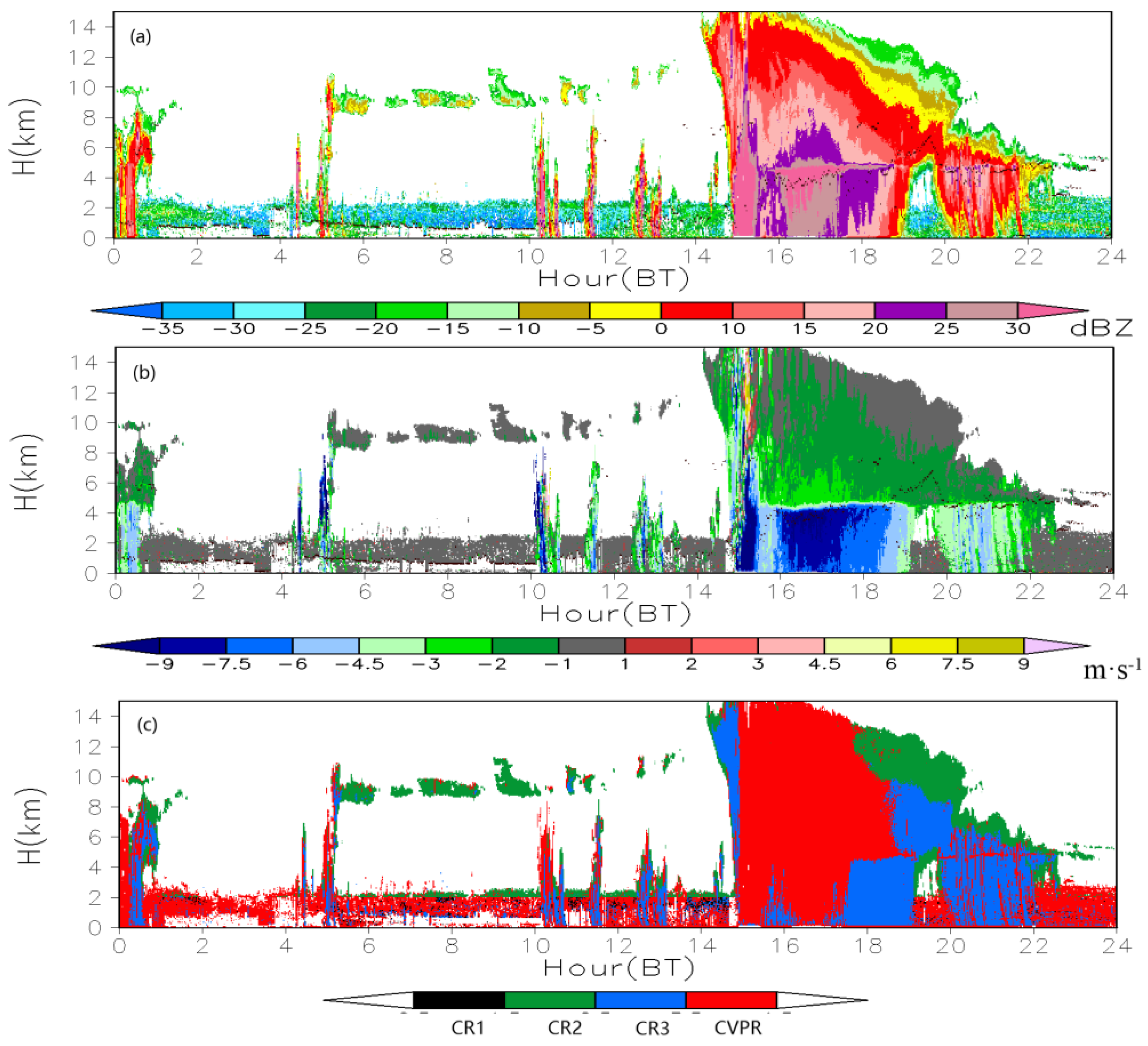
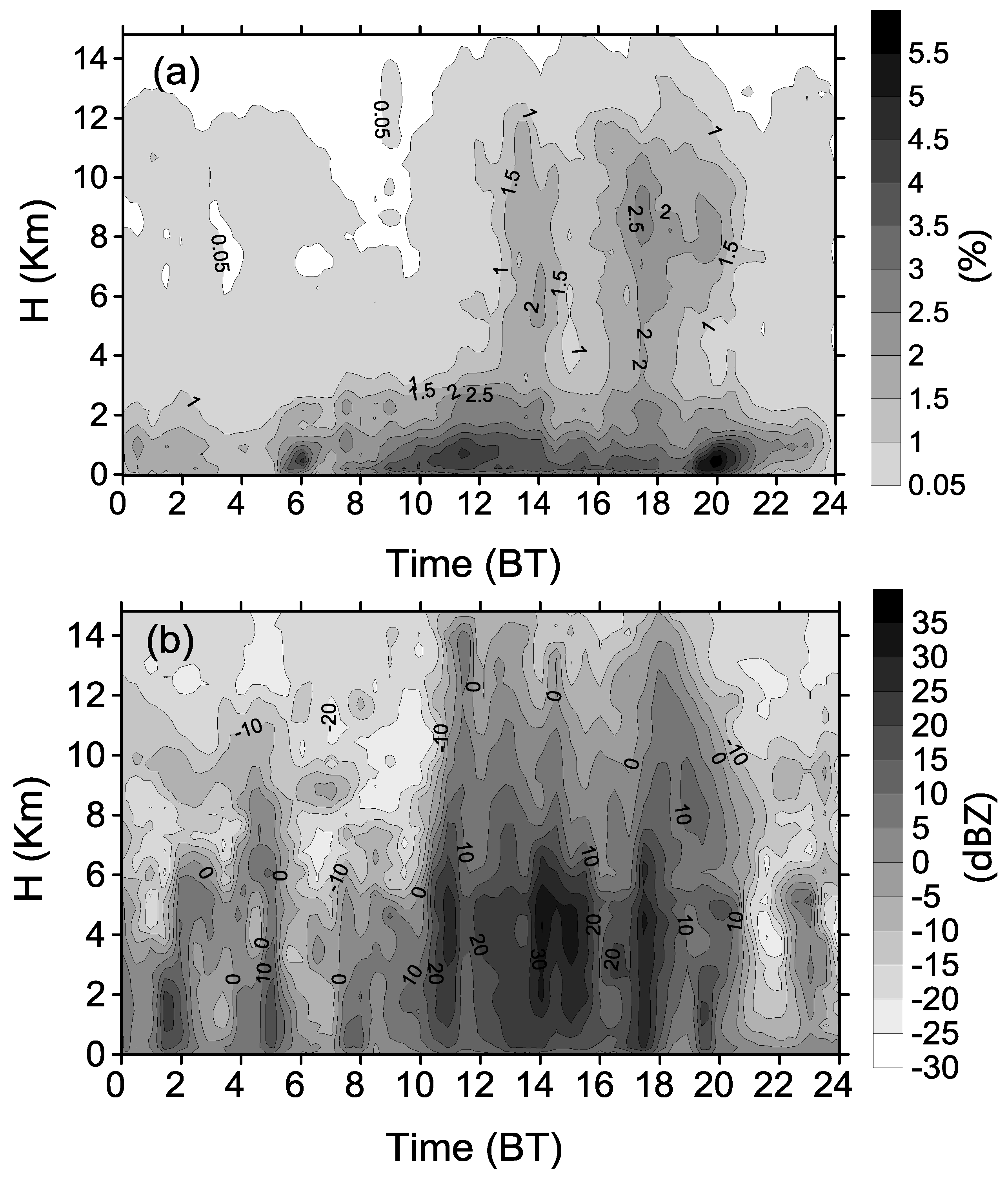
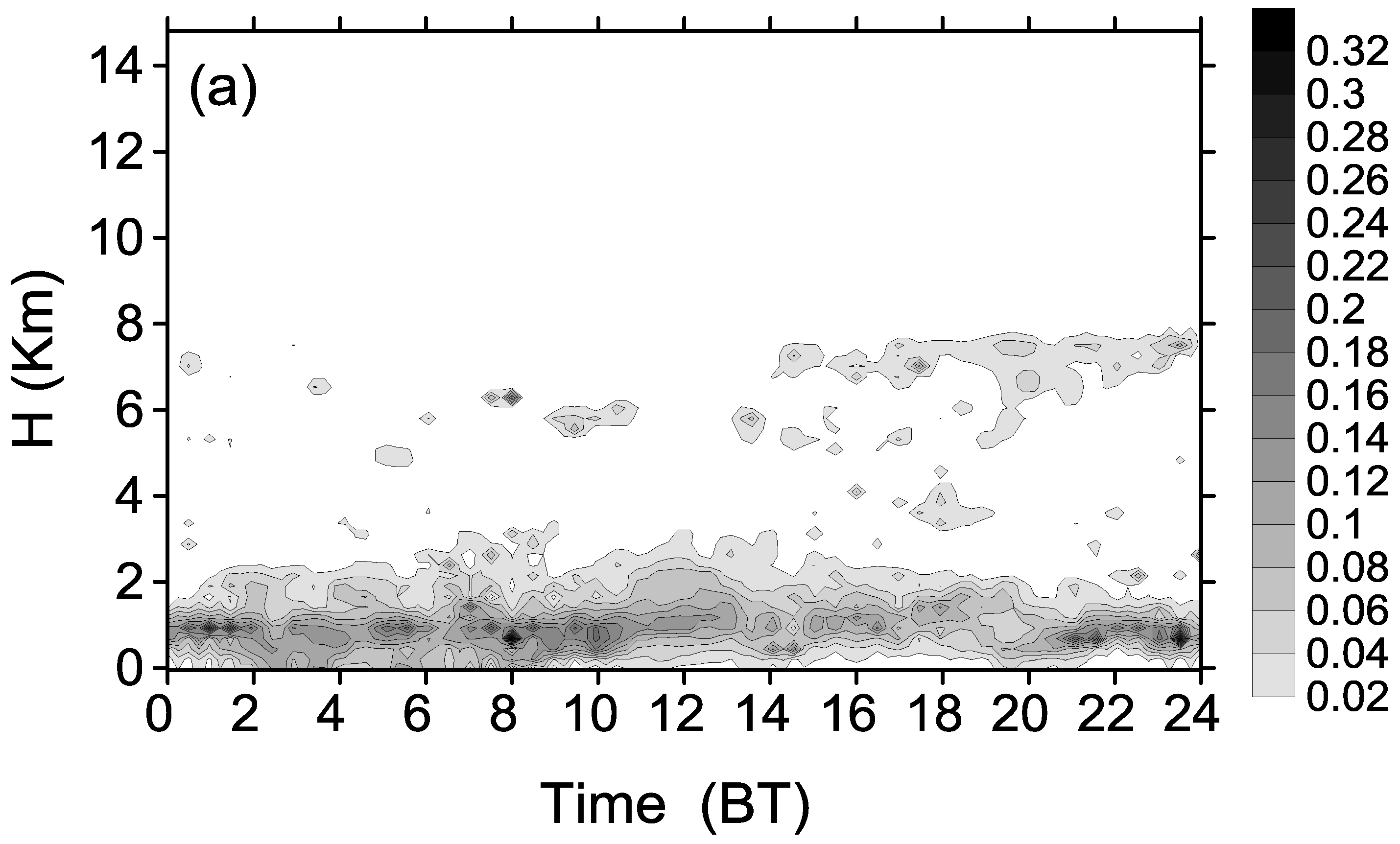
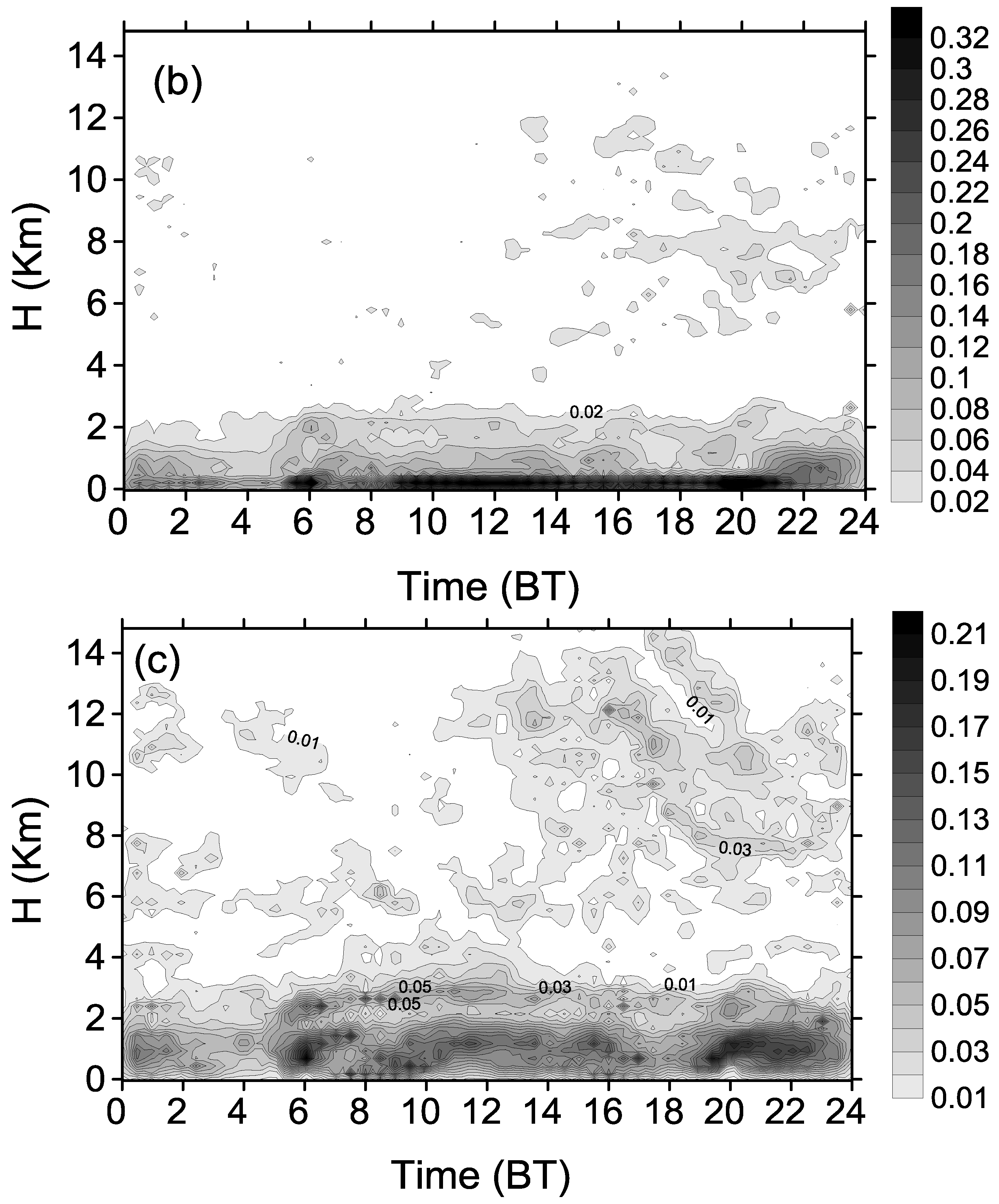
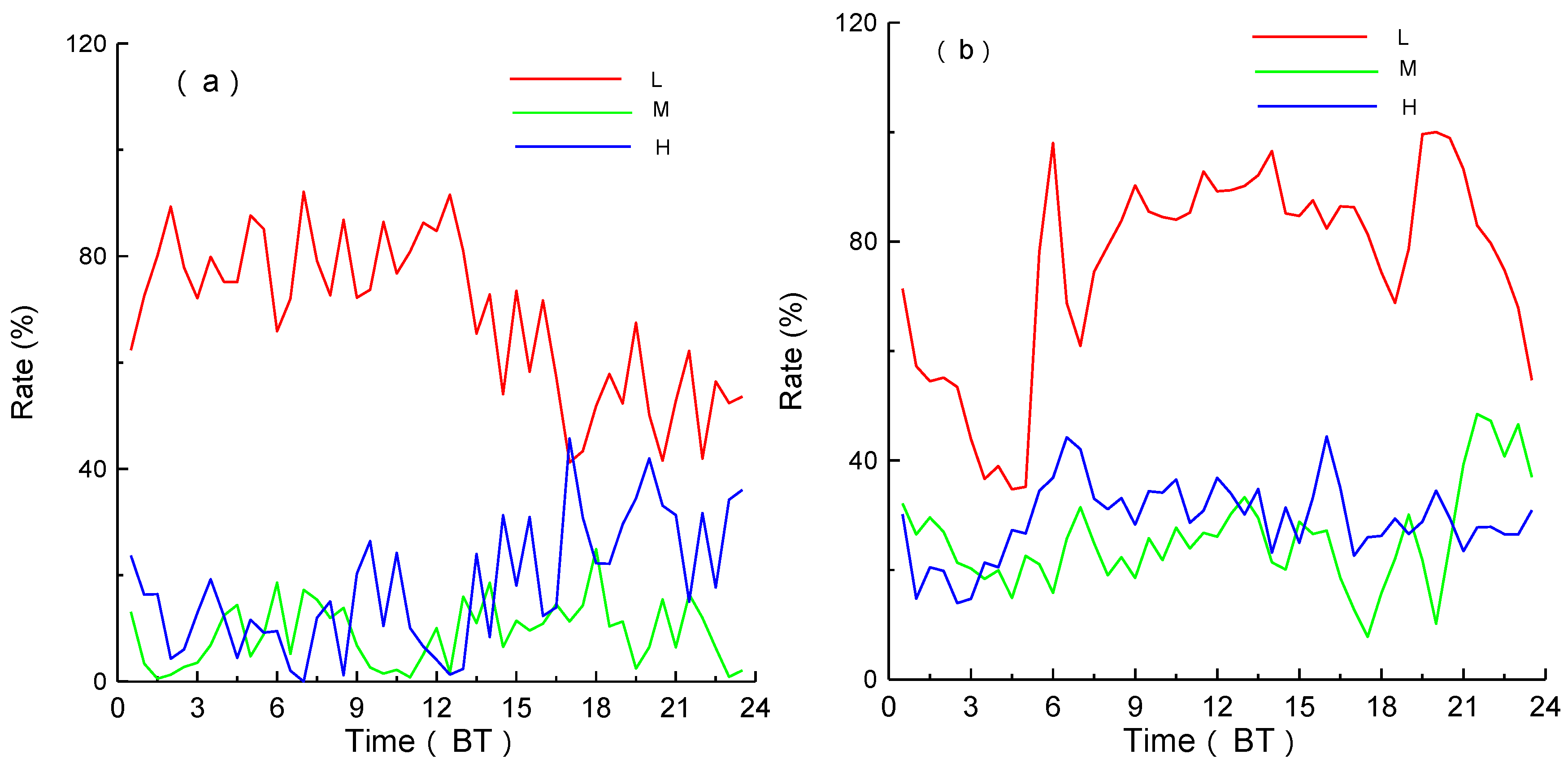
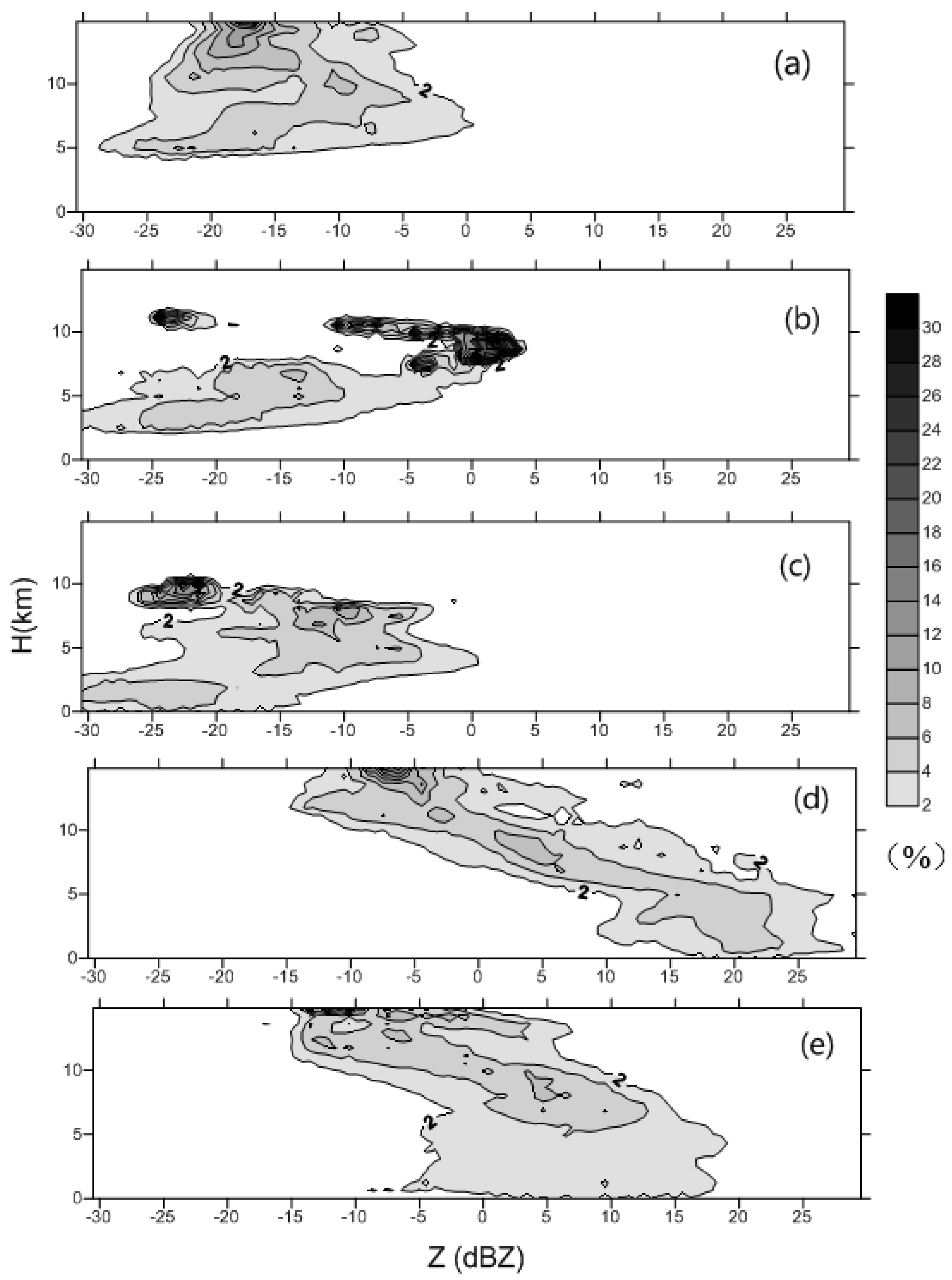
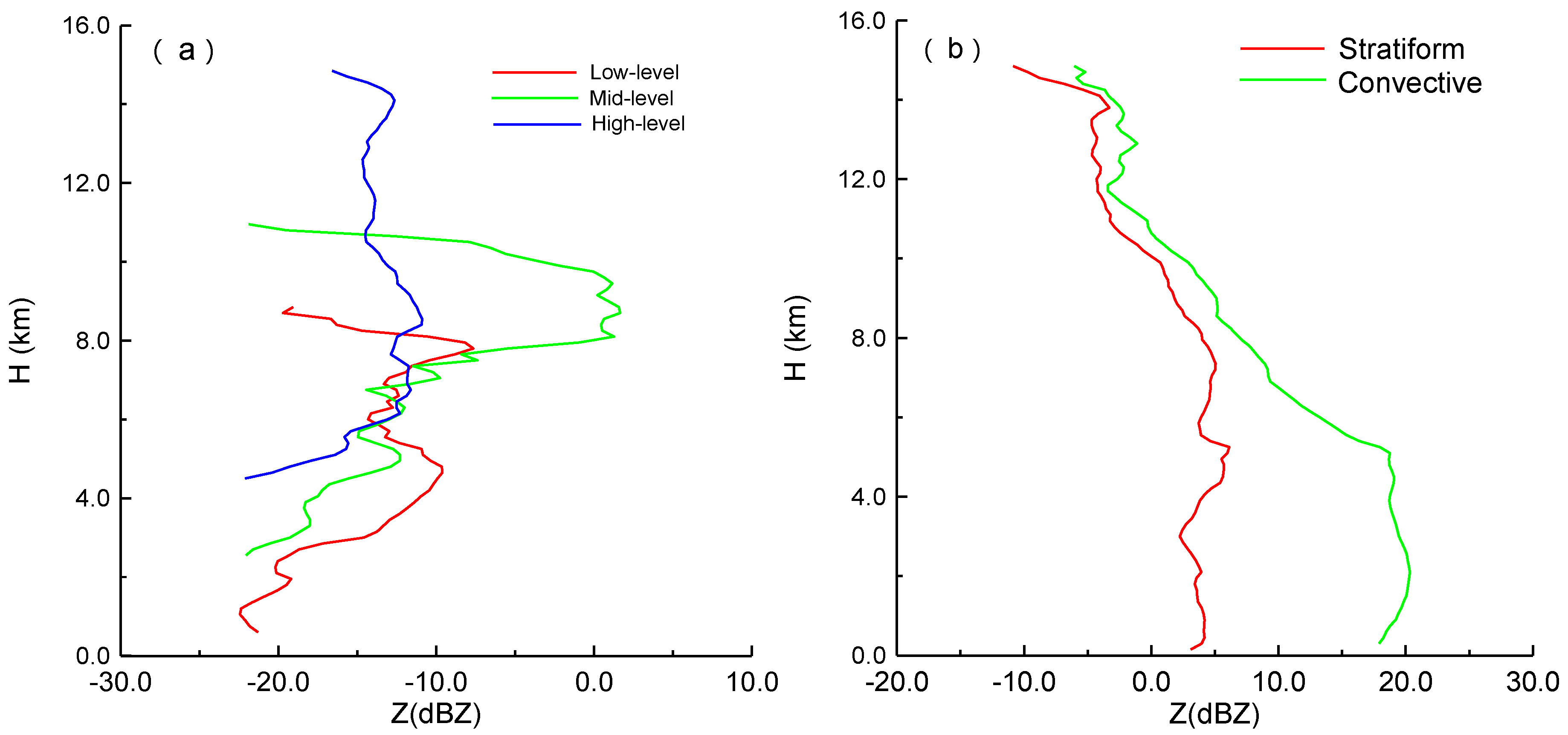
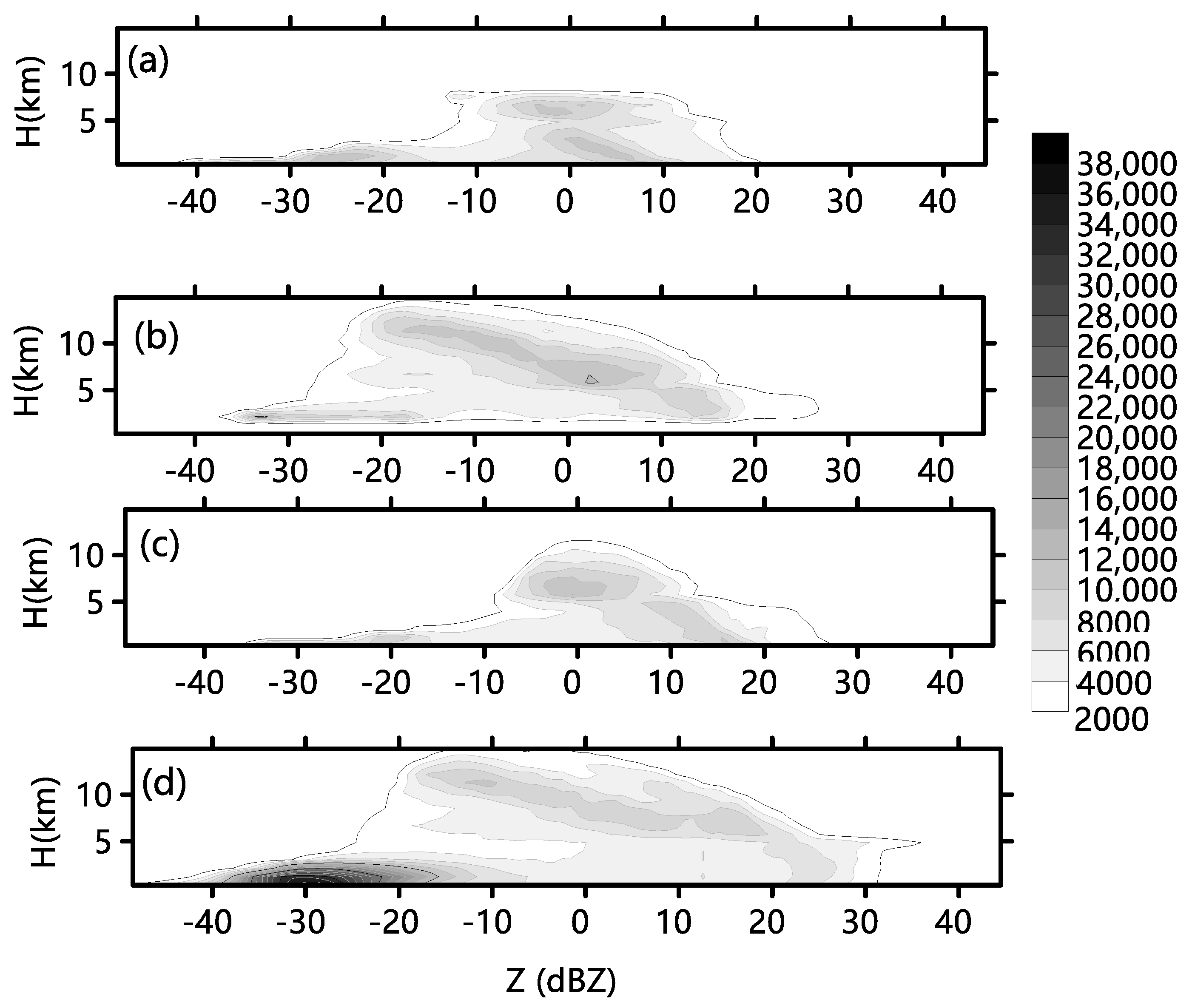
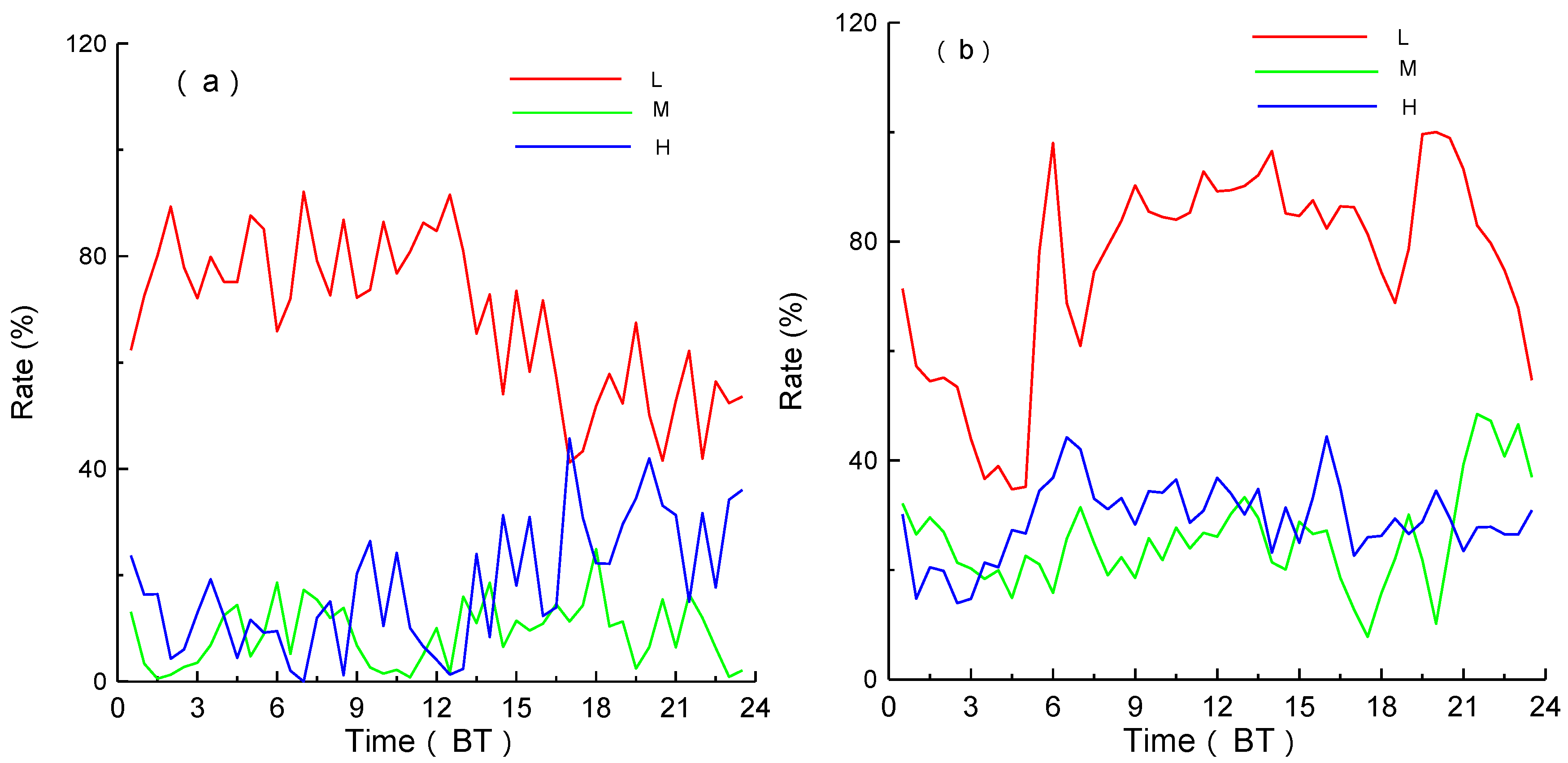
- The three periods of high occurrence frequency of low-level clouds occurred at sunrise, noon and sunset and large differences in the average reflectivity could be found. Two high occurrence frequency periods for mid- and high-level clouds occurred at 1400 BT and 1800 BT. Few clouds were found between 3 km and 5 km altitude, while large amounts of clouds were concentrated at levels below 3 km and in the layer between 6 and 10 km. Diurnal variations of cloud occurrence frequency and their vertical distributions for South China and the Tibetan Plateau were different. However, there are obvious levels with few clouds in both areas.
- (v)
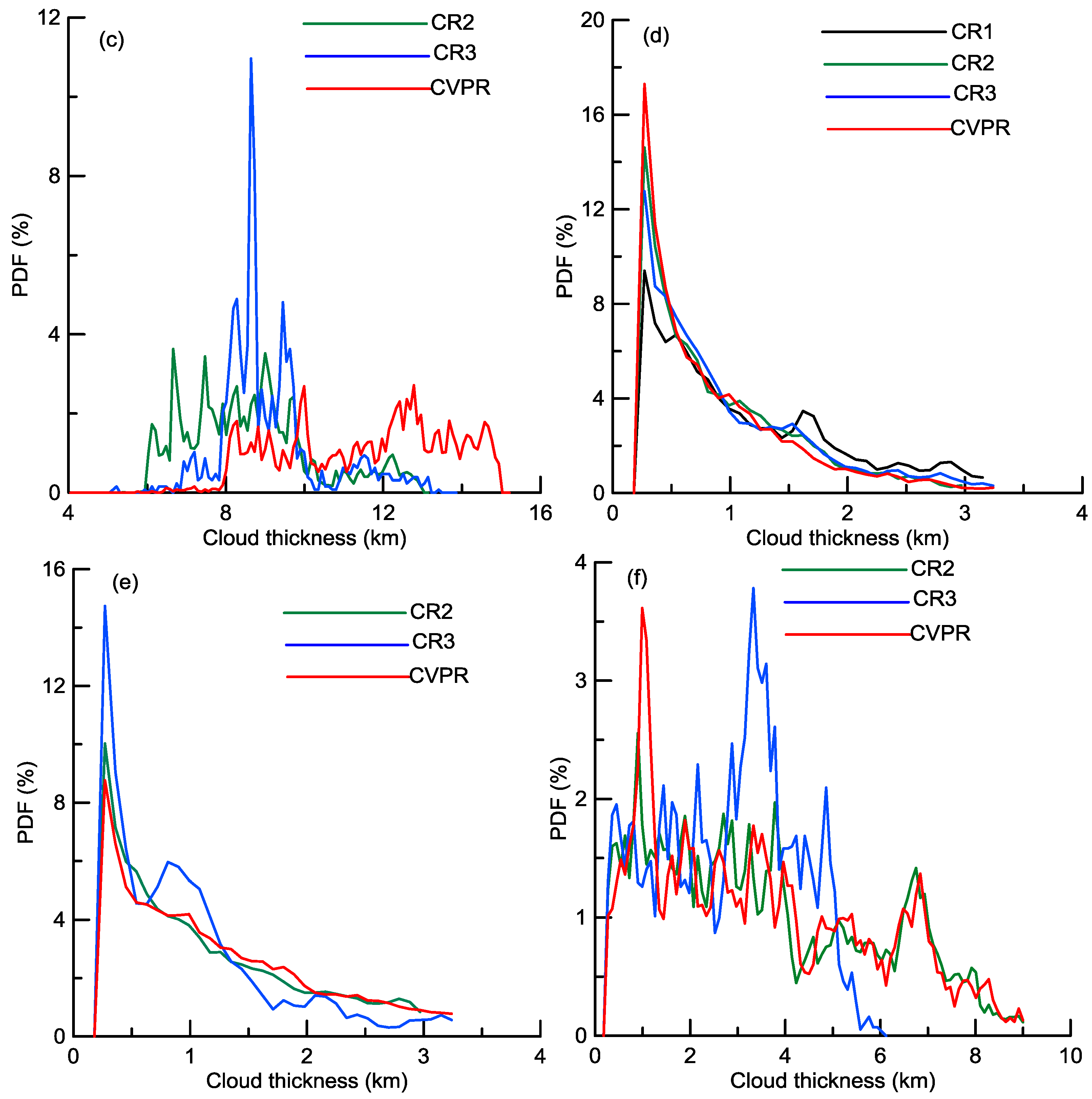
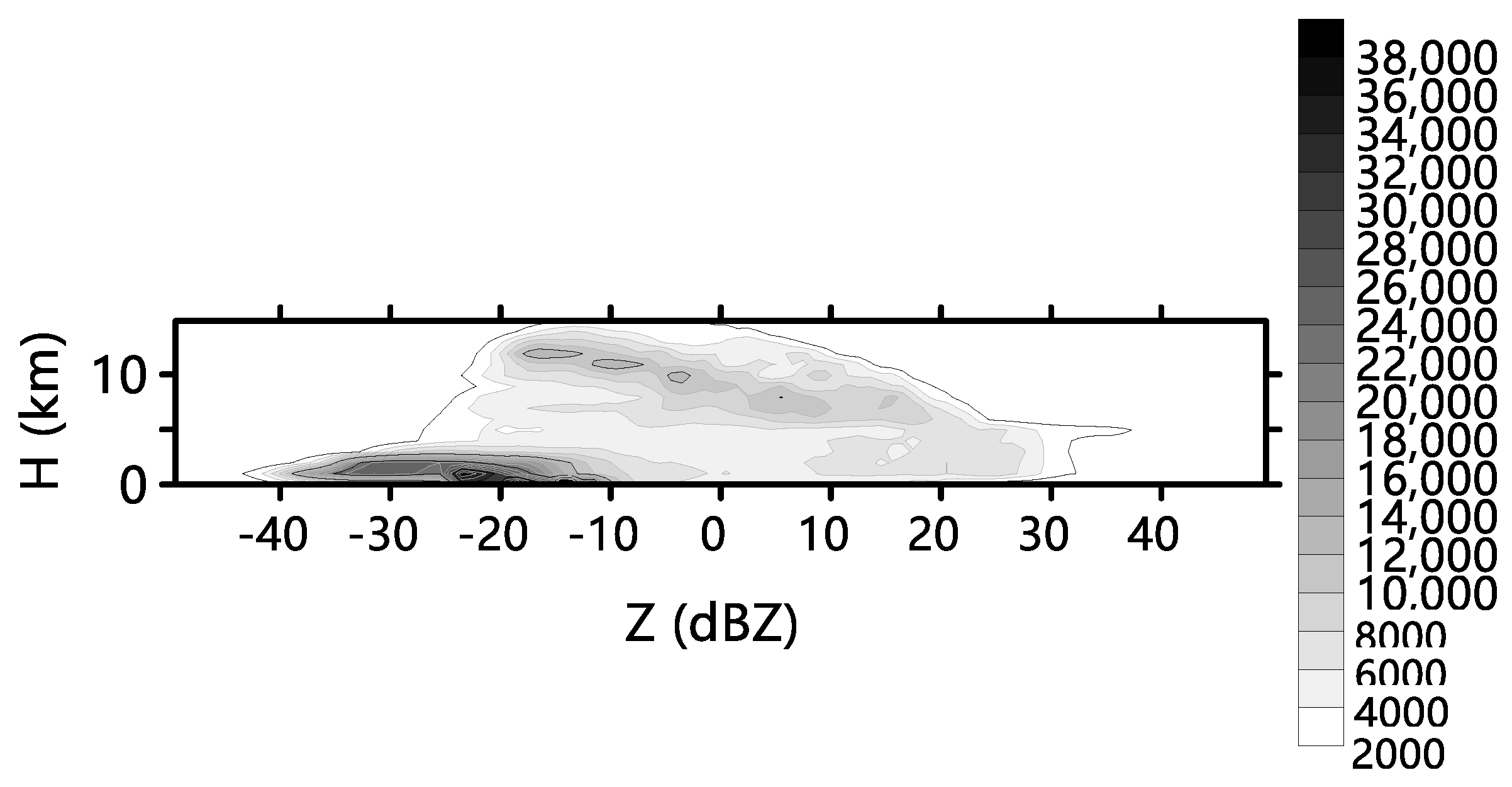
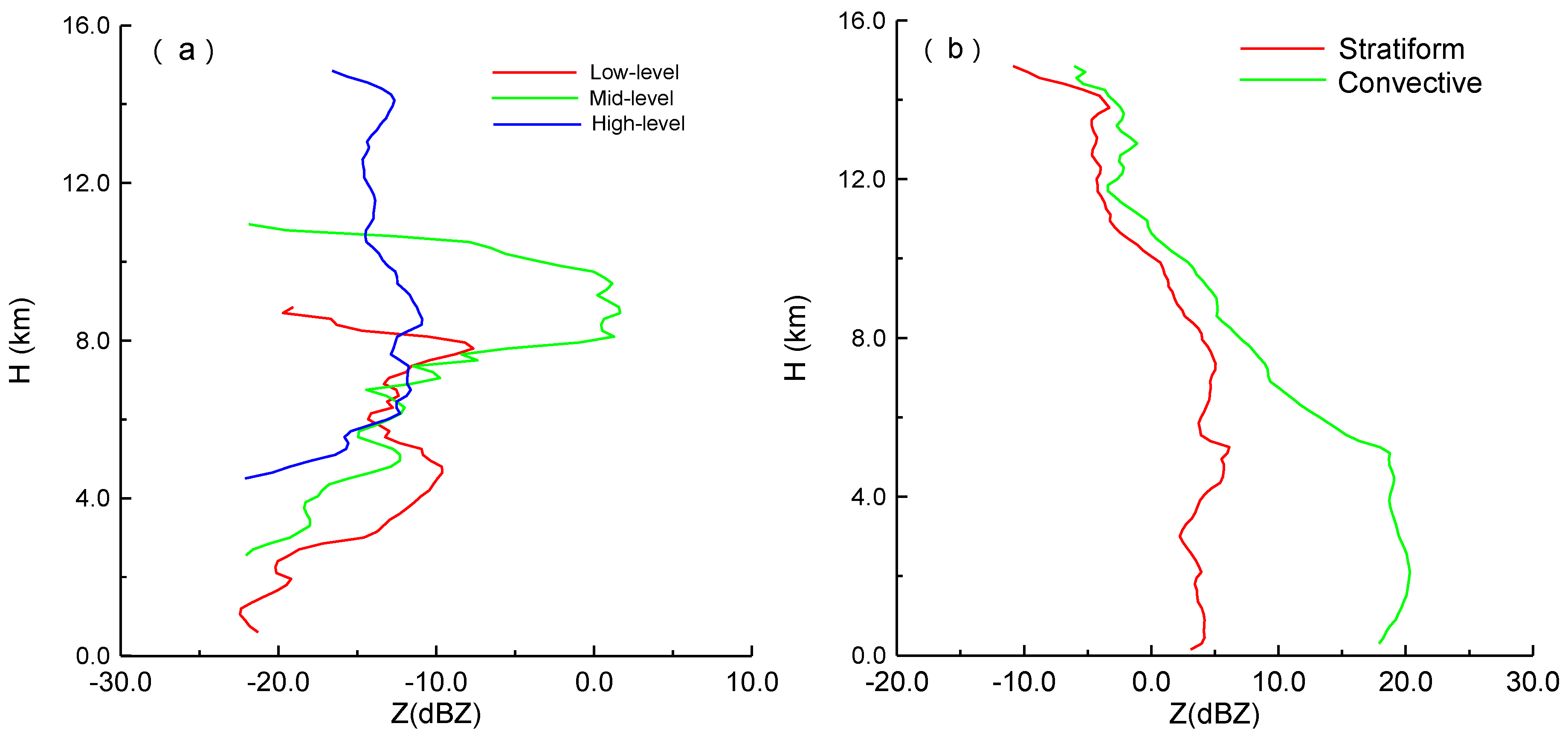
- Low-level and high-level clouds have similar averaged reflectivity of about −10 dBZ, while, the averaged reflectivity for mid-level clouds are relative strong (about 0 dBZ). The variations of reflectivity distributions with altitude for stratiform and convective precipitations above 5 km are different, which reveal that different micro-physical processes occur in the two types of precipitation systems.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hartmann, D.L.; Ockert-Bell, M.E.; Michelsen, M.L. The Effect of Cloud Type on Earth’s Energy Balance: Global Analysis. J. Clim. 1992, 5, 1281–1304. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Li, Z.; Fan, X.; Peng, L.; Yu, Y.; Crbb, M. Analysis of cloud layer structure in Shouxian, China using RS92 radiosonde aided by 95 GHz cloud radar. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Thurairajah, B.; Shaw, J.A. Cloud statistics measured with the infrared cloud imager (ICI). IEEE Trans. Geosci. Remote Sens. 2005, 43, 2000–2007. [Google Scholar] [CrossRef]
- Clothiaux, E.E.; Ackerman, T.P.; Mace, G.G.; Moran, K.P.; Marchand, R.T.; Miller, M.A.; Martner, B.E. Objective determination of cloud heights and radar reflectivities using a combination of active remote sensors at the ARM CART sites. J. Appl. Meteorol. 2000, 39, 645–665. [Google Scholar] [CrossRef]
- Huang, X.; Hu, H.; Xia, J.; Bo, L.; Zhang, X.; Lei, Y.; Huang, J.; Wang, W.; Wu, D.; Jiang, C.; et al. Comparison and analysis of cloud base height measured by ceilometer, infrared cloud measuring system and cloud radar (in Chinese with English abstract). Chin. J. Quantum Electron. 2013, 30, 73–78. [Google Scholar]
- Tao, F.; Ma, S.; Qin, Y.; Hu, S.; Wen, X.; Lei, Y.; Guo, W.; Zhang, C. Cloud base height measurement methods based on dual-camera stereovision (in Chinese with English abstract). J. Appl. Meteorol. Sci. 2013, 24, 323–331. [Google Scholar]
- Gaumet, J.L.; Heinrich, J.C.; Cluzeau, M.; Pierrard, P.; Prieur, J. Cloud-base height measurements with a single-pulse erbium-glass laser ceilometer. J. Atmos. Ocean. Technol. 1998, 15, 37–45. [Google Scholar] [CrossRef]
- Moran, K.P.; Martner, B.E.; Post, M.J.; Kropfli, R.A.; Welsh, D.C.; Widener, K.B. An unattended cloud-profiling radar for use in climate research. Bull. Am. Meteorol. Soc. 1998, 79, 443–455. [Google Scholar] [CrossRef]
- Clothiaux, E.E.; Moran, K.P.; Martner, B.E.; Ackerman, T.P.; Mace, G.G.; Uttal, T.; Mather, J.H.; Widener, K.B.; Miller, M.A.; Rodriguezand, D.J. The Atmospheric Radiation Measurement Program Cloud Radars: Operational Models. J. Atmos. Ocean. Technol. 1999, 16, 819–827. [Google Scholar] [CrossRef]
- Feng, Z.; Sally, A.M.; Courtney, S.; Ellis, S.; Comstock, J.; Bharadwaj, N. Constructing a merged cloud-precipitation radar dataset for tropical convective clouds during the DYNAMO/AMIE experiment at Addu Atoll. J. Atmos. Ocean. Technol. 2014, 31, 1021–1042. [Google Scholar] [CrossRef]
- Li, S.; Ma, S.; Gao, Y.; Yang, L.; Pu, X.; Tao, F. Comparative analysis of cloud base heights observed by cloud radar and ceilometer (in Chinese with English abstract). Meteorol. Mon. 2015, 41, 212–218. [Google Scholar]
- Yan, B.; Song, X.; Chen, C.; Liu, Z. Beijing atmospheric boundary layer observation with Lidar in 2011 spring (in Chinese with English abstract). Acta Opt. Sin. 2013, 33(S1), s128001. [Google Scholar] [CrossRef]
- Cao, N.; Shi, J.Y.; Zhang, Y.; Yang, F.; Jian, L.; Bo, L.; Xia, J.; Yang, J.; Yan, P. Aerosol Measurements by Raman-Rayleigh-Mie Lidar in North Suburb Area of Nanjing City (in Chinese with English abstract). Laser Optoelectron. Prog. 2012, 49, 060101. [Google Scholar] [CrossRef]
- Richter, J. High-resolution tropospheric radar sounding. Radio Sci. 1969, 4, 1261–1268. [Google Scholar] [CrossRef]
- Eaton, F.D.; Mclaughlin, S.A.; Hines, J.R. A new frequency-modulated continuous wave radar for studying planetary boundary layer morphology. Radio Sci. 1995, 30, 75–88. [Google Scholar] [CrossRef]
- Ince, T.; Friasier, S.T.; Muschinski, A.; Pazmany, A.L. An S-band frequency-modulated continuous-wave boundary layer profiler: Description and initial results. Radio Sci. 2003, 38. [Google Scholar] [CrossRef]
- Bennett, L.J.; Weckwerth, T.M.; Blyth, A.M.; Geerts, B.; Miao, Q.; Richardson, Y.P. Observations of the evolution of the nocturnal and convective boundary layers and the structure of open-celled convection on 14 June 2002. Mon. Weather Rev. 2010, 138, 2589–2607. [Google Scholar] [CrossRef]
- Peters, G.; Fischer, B.; Andersson, T. Rain observations with a vertically looking Micro Rain Radar (MRR). Boreal Environ. Res. 2002, 7, 353–362. [Google Scholar]
- Melchionna, S.; Bauer, M.; Peters, G. A new algorithm for the extraction of cloud parameters using multipeak analysis of cloud radar data—First application and preliminary results. Meteorol. Z. 2008, 17, 613–620. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Zheng, J.; Ruan, Z.; Cui, Z.; Hu, Z.; Wu, S.; Dai, G.; Wu, Y. Comprehensive radar observations of clouds and precipitation over the Tibetan Plateau and preliminary analysis of cloud properties. J. Meteorol. Res. 2015, 29, 546–561. [Google Scholar] [CrossRef]
- Liu, L.; Zheng, J.; Wu, J. A Ka-band solid-state transmitter cloud radar and data merging algorithm for its measurements. Adv. Atmos. Sci. 2017, 34, 545–558. [Google Scholar] [CrossRef]
- Ruan, Z.; Jin, L.; Ge, R.; Li, F.; Wu, J. The C-band CVPR pointing weather radar system and its observation experiment (in Chinese with English abstract). ACTA Meteorol. Sin. 2015, 73, 577–592. [Google Scholar]
- Luo, Y.; Zhang, R.; Wan, Q.; Wang, B.; Wong, W.K.; Hu, Z.; Jou, B.J.; Lin, Y.; Johnson, R.H.; Chang, C.P.; et al. The Southern China Monsoon Rainfall Experiment (SCMREX). Bull. Am. Meteorol. Soc. 2017, 98, 999–1013. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, L. Statistical characteristics of raindrop size distribution in the Tibetan Plateau and Southern China. Adv. Atmos. Sci. 2017, 34, 727–736. [Google Scholar] [CrossRef]
- Barber, P.; Yeh, C. Scattering of electromagnetic wave by arbitrarily shaped dielectric bodies. Appl. Opt. 1975, 14, 2864–2872. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Teng, X.; Ji, L.; Zhao, F. A study of the relationship between the attenuation coefficient and radar reflectivity factor for spherical particles in clouds at millimeter wavelengths (in Chinese with English abstract). Acta Meteorol. Sin. 2011, 69, 1020–1028. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Items | Technical Specifications |
|---|---|---|
| General Technical Parameter of the Cloud Radar System | ||
| 1 | Radar system | Coherent, pulsed Doppler, solid-state transmitter, pulse compression |
| 2 | Radar frequency | 33.44 GHz (Ka-band) |
| 3 | Beam width | 0.35° |
| 4 | Detecting parameters | Z, Vr, SW, LDR, Sz |
| 5 | Detection capability | ≤−30 dBZ at 5 km |
| 6 | Range of detection | Height: 0.120 km~15 km Reflectivity: −50 dBZ~+30 dBZ radial velocity: 4.67 m·s−1~18.67 m·s−1 (maximum) velocity spectrum width: 0 m·s−1~4 m·s−1 (maximum) |
| Temporal resolution: 6 s (adjustable) Height resolution: 30 m | ||
| Order | Items | Boundary Mode (CR1) | Cirrus Mode (CR2) | Precipitation Mode (CR3) |
|---|---|---|---|---|
| 1 | the pulse width | 0.2 μs | 12 μs | 0.2 μs |
| 2 | the pulse repetition frequency | 8333 HZ | 8333 HZ | 8333 HZ |
| 3 | the number of coherent integration | 4 | 2 | 1 |
| 4 | the number of incoherent integration | 16 | 32 | 64 |
| 5 | the number of fast Fourier transform points | 256 | 256 | 256 |
| 6 | Dwell time | 2 s | 2 s | 2 s |
| 7 | the number of range gates | 256, 128 | 512, 256 | 512, 256 |
| 8 | the range sample volume spacing | 30 m | 30 m | 30 m |
| 9 | the minimum range | 30 m (theoretical) | 1800 m (theoretical) | 30 m (theoretical) |
| 120 m (practical) | 2010 m (practical) | 120 m (practical) | ||
| 10 | the maximum range | 18 km | 18 km | 18 km |
| 11 | Nyquist velocity | 4.67 m·s−1 | 9.34 m·s−1 | 18.67 m·s−1 |
| 12 | the radial velocity resolution | 0.018 m·s−1 | 0.036 m·s−1 | 0.073 m·s−1 |
| Order | Items | Technical Specifications |
|---|---|---|
| 1 | Radar system | frequency modulated continuous wave, vertically pointing |
| 2 | Radar wave frequency | 5530 MHz |
| 3 | Antenna | Double Parabolic, Two antennas for transmitting and receiving, Beam width 2.6° |
| 4 | Range of detection | 0.1–24 km (vertical direction) |
| 5 | Nyquist velocity | 22 m·s−1 |
| 6 | Dwell time | 2–3 s |
| 7 | range solution and gate number | range solution: 15 m, 30 m; Gate number: 512, 1024 |
| 8 | Detecting parameters | Z, Vr, SW, Sz |
| Order | Items | Technical Specifications |
|---|---|---|
| 1 | Transmitter | pulsed |
| 2 | Wave length (nm) | 910 ± 10 |
| 3 | Peak power (W) | 27 |
| 4 | Pulse repetition frequency (kHz) | 6.5 |
| 5 | Sampling volume (mm3) | 834 × 266 × 264 |
| 6 | Detection range (km) | 0~15 |
| 7 | Cloud Measurable height (km) | 0~13 |
| 8 | Spatial resolution (m) | 10 |
| 9 | Temporal resolution | 6 s |
| 10 | Vertical visibility (m) | Cloud base heights for first, second and third layers (m) |
| Order | Items | Technical Specifications |
|---|---|---|
| 1 | Measurable diameter range (mm) | 0.062~24.5 mm |
| 2 | Measurable velocity range (m·s−1) | 0.05~20.8 |
| 3 | Sensor sampling size (cm2) | 54 |
| 4 | Temporal resolution (s) | 60 |
| 5 | Grade number | 32 |
| 6 | Diameter grades (mm) | 0.062, 0.187, 0.312, 0.437, 0.562, 0.687, 0.812, 0.937, 1.062, 1.187, 1.375, 1.625, 1.875, 2.125, 2.375, 2.75, 3.25, 3.75, 4.25, 4.75, 5.5, 6.5, 7.5, 8.5, 9.5, 11, 13, 15, 17, 19, 21.5, 24.5 |
| 7 | Velocity grades (m·s−1) | 0.05, 0.15, 0.25, 0.35, 0.45, 0.55, 0.65, 0.75, 0.85, 0.95, 1.1, 1.3, 1.5, 1.7, 1.9, 2.2, 2.6, 3, 3.4, 3.8, 4.4, 5.2, 6.0, 6.8, 7.6, 8.8, 10.4, 12, 13.6, 15.2, 17.6, 20.8 |
| 8 | Rain amount (mm) | 1 min, 1 h |
| 9 | Rain rate (m·s−1) | 1 min, 1 h |
| 10 | Reflectivity (dBZ) | (for Rayleigh scattering) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Ruan, Z.; Zheng, J.; Gao, W. Comparing and Merging Observation Data from Ka-Band Cloud Radar, C-Band Frequency-Modulated Continuous Wave Radar and Ceilometer Systems. Remote Sens. 2017, 9, 1282. https://doi.org/10.3390/rs9121282
Liu L, Ruan Z, Zheng J, Gao W. Comparing and Merging Observation Data from Ka-Band Cloud Radar, C-Band Frequency-Modulated Continuous Wave Radar and Ceilometer Systems. Remote Sensing. 2017; 9(12):1282. https://doi.org/10.3390/rs9121282
Chicago/Turabian StyleLiu, Liping, Zheng Ruan, Jiafeng Zheng, and Wenhua Gao. 2017. "Comparing and Merging Observation Data from Ka-Band Cloud Radar, C-Band Frequency-Modulated Continuous Wave Radar and Ceilometer Systems" Remote Sensing 9, no. 12: 1282. https://doi.org/10.3390/rs9121282
APA StyleLiu, L., Ruan, Z., Zheng, J., & Gao, W. (2017). Comparing and Merging Observation Data from Ka-Band Cloud Radar, C-Band Frequency-Modulated Continuous Wave Radar and Ceilometer Systems. Remote Sensing, 9(12), 1282. https://doi.org/10.3390/rs9121282