River Levels Derived with CryoSat-2 SAR Data Classification—A Case Study in the Mekong River Basin

 , , , and
, , , and
Abstract
1. Introduction
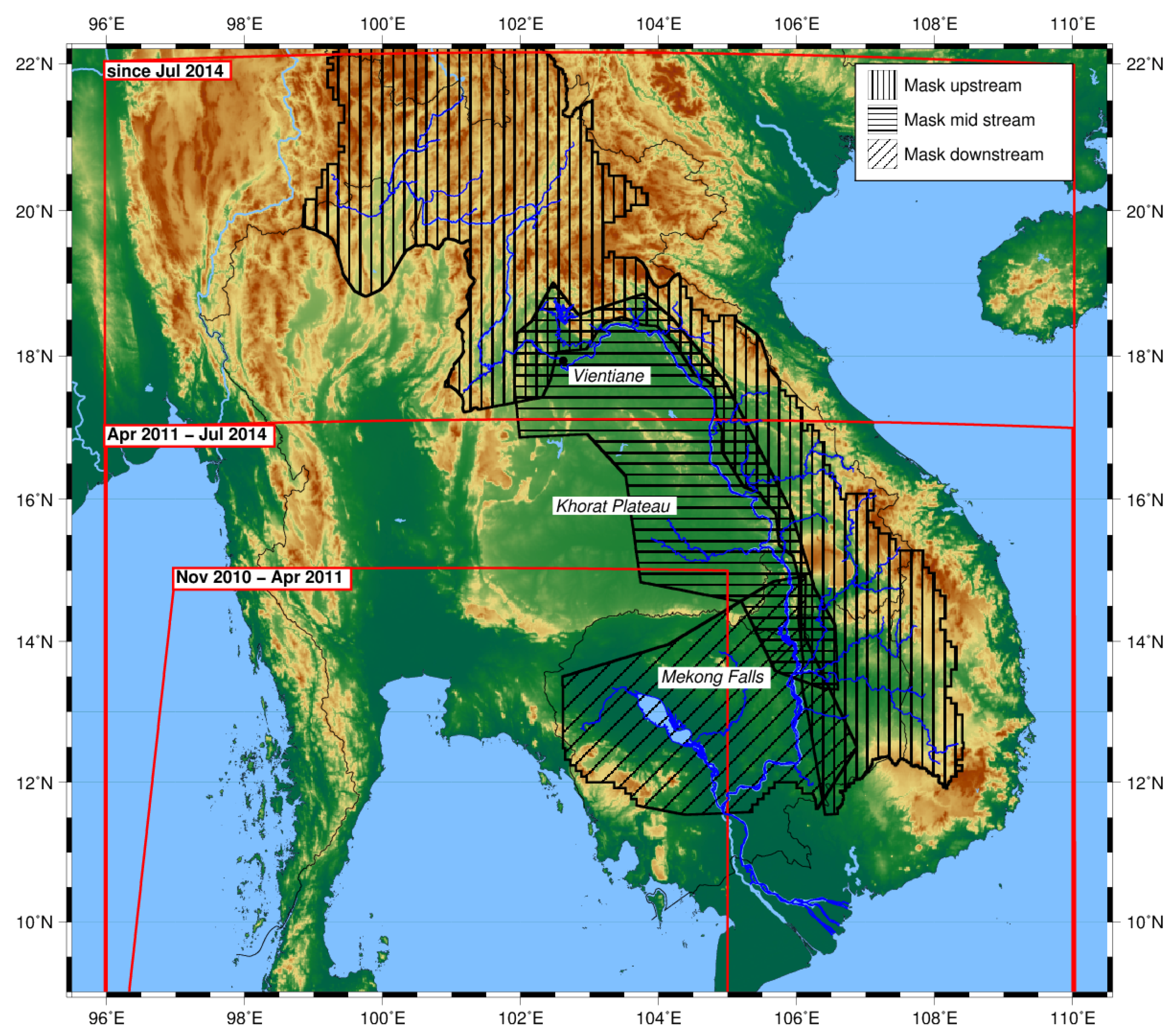
2. Study Area
3. Data
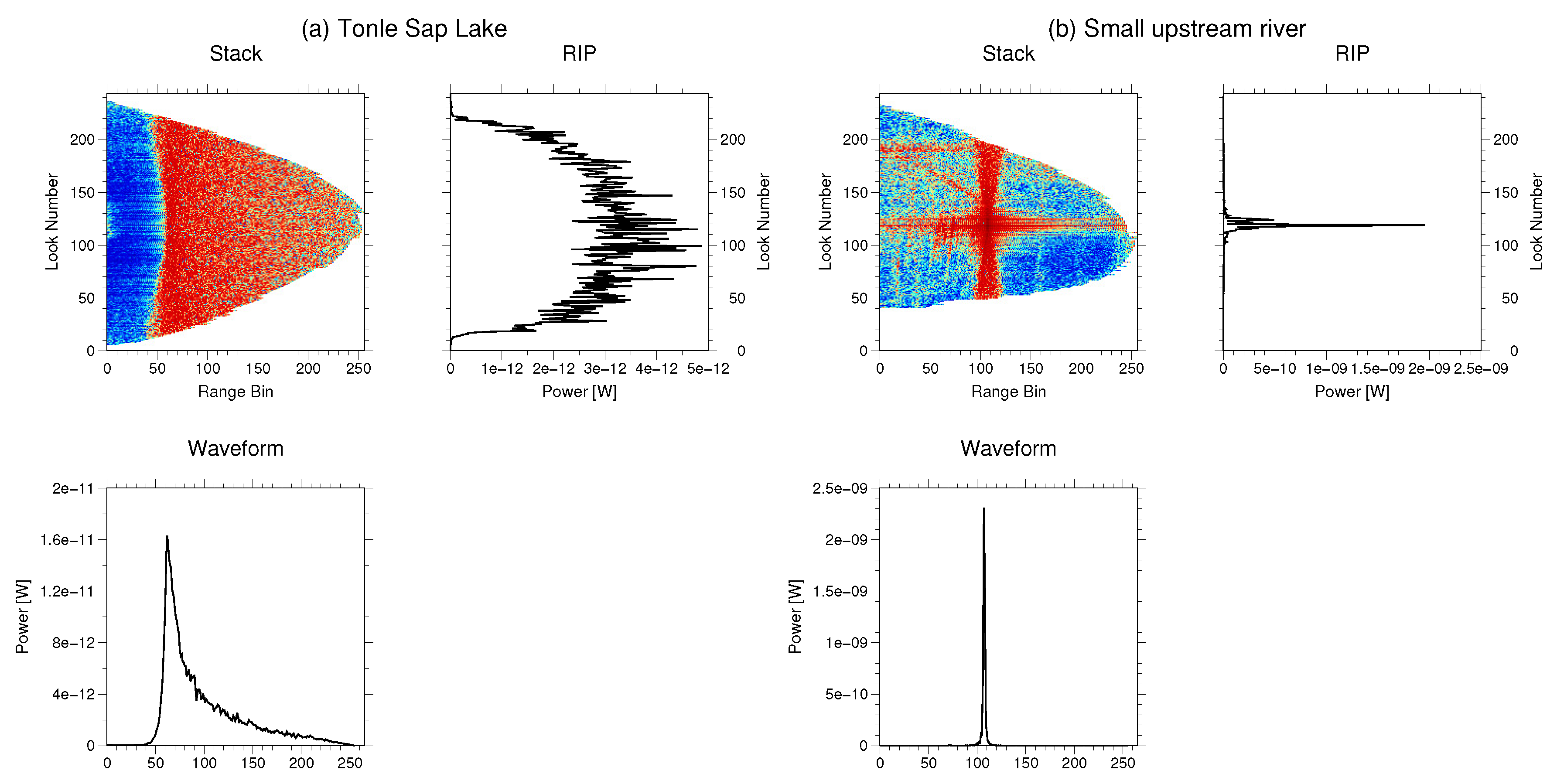
3.1. CryoSat-2 SAR Data
3.2. Envisat Data
3.3. In Situ Data
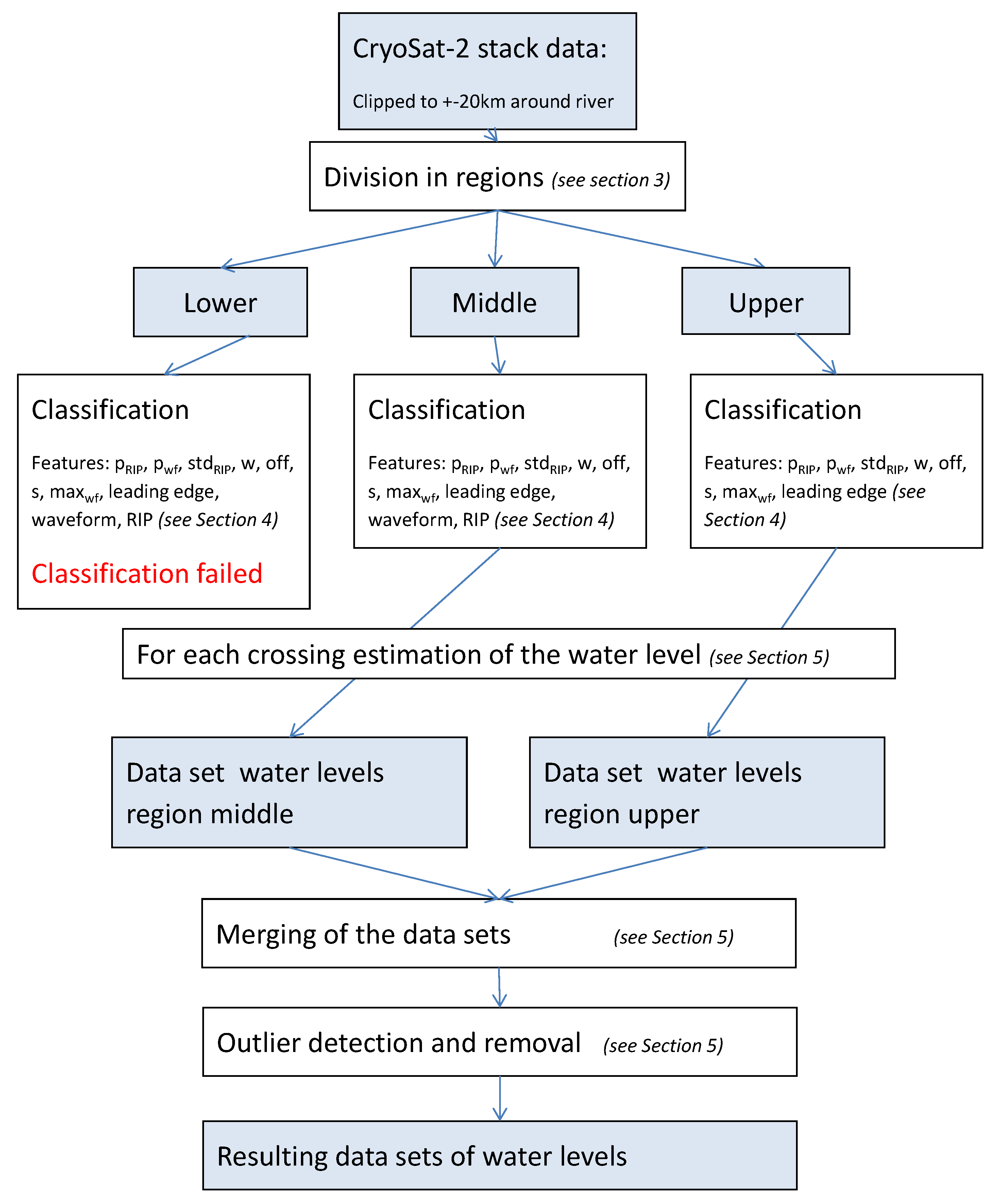
4. Methods
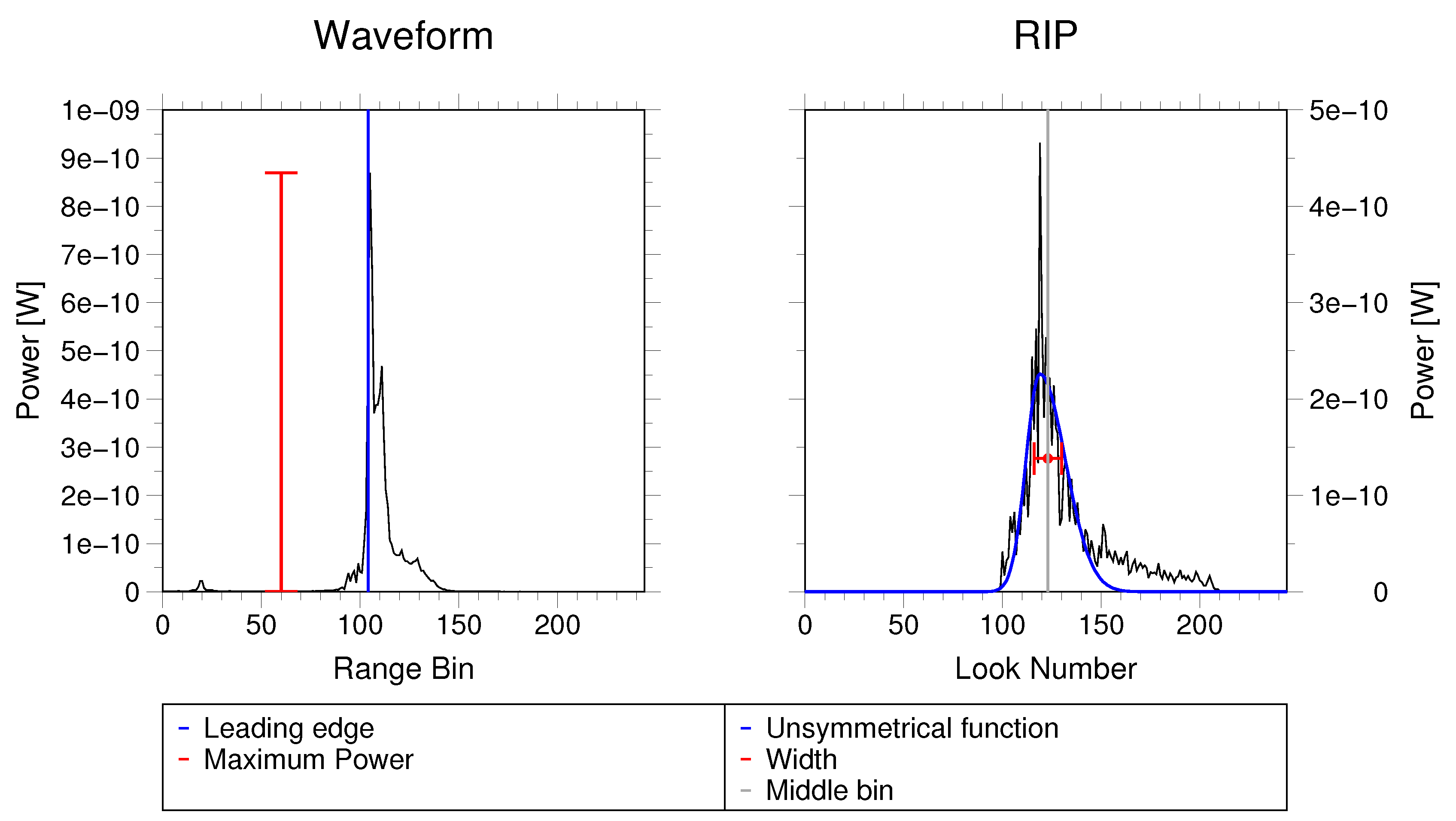
4.1. Classification Approach
4.2. Water Level Estimation Approach
4.2.1. Altimetric Water Levels
4.2.2. Outlier Detection
4.2.3. Merging of the Overlap Regions
5. Results and Validation
5.1. Results of the Classification
5.2. Resulting Water Level
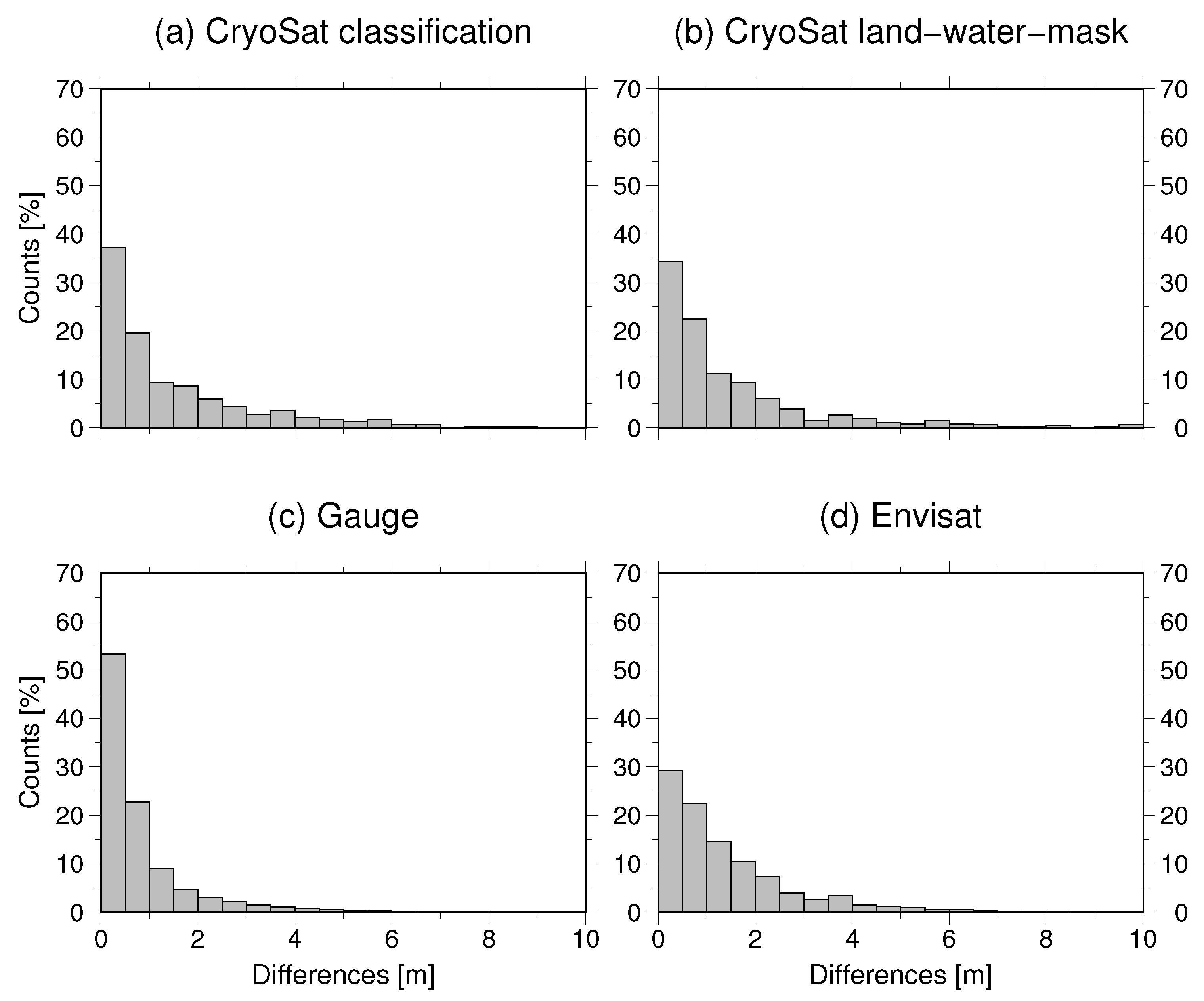
5.3. Validation
5.3.1. Validation of the Classification
5.3.2. Validation of Water Levels
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
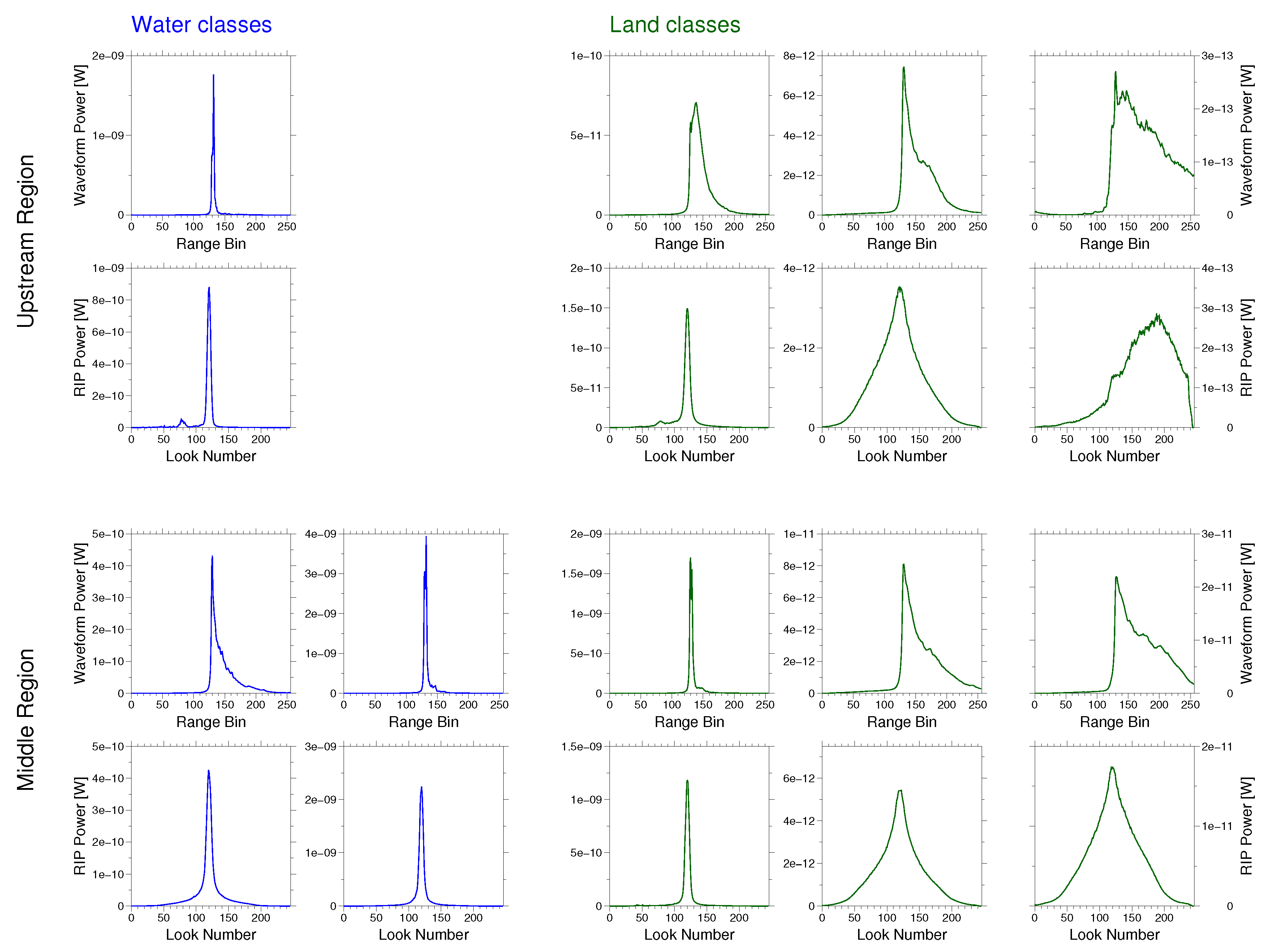
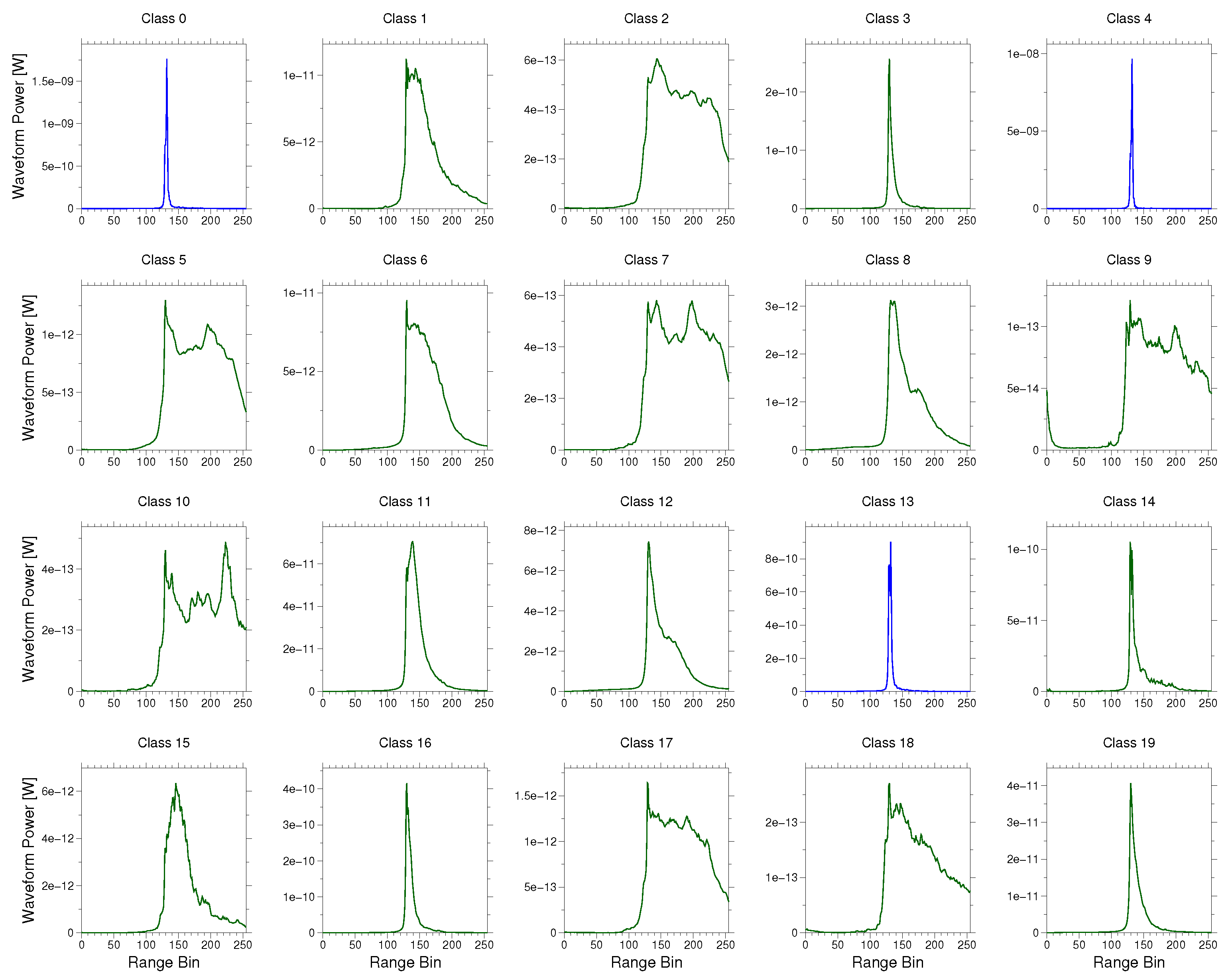
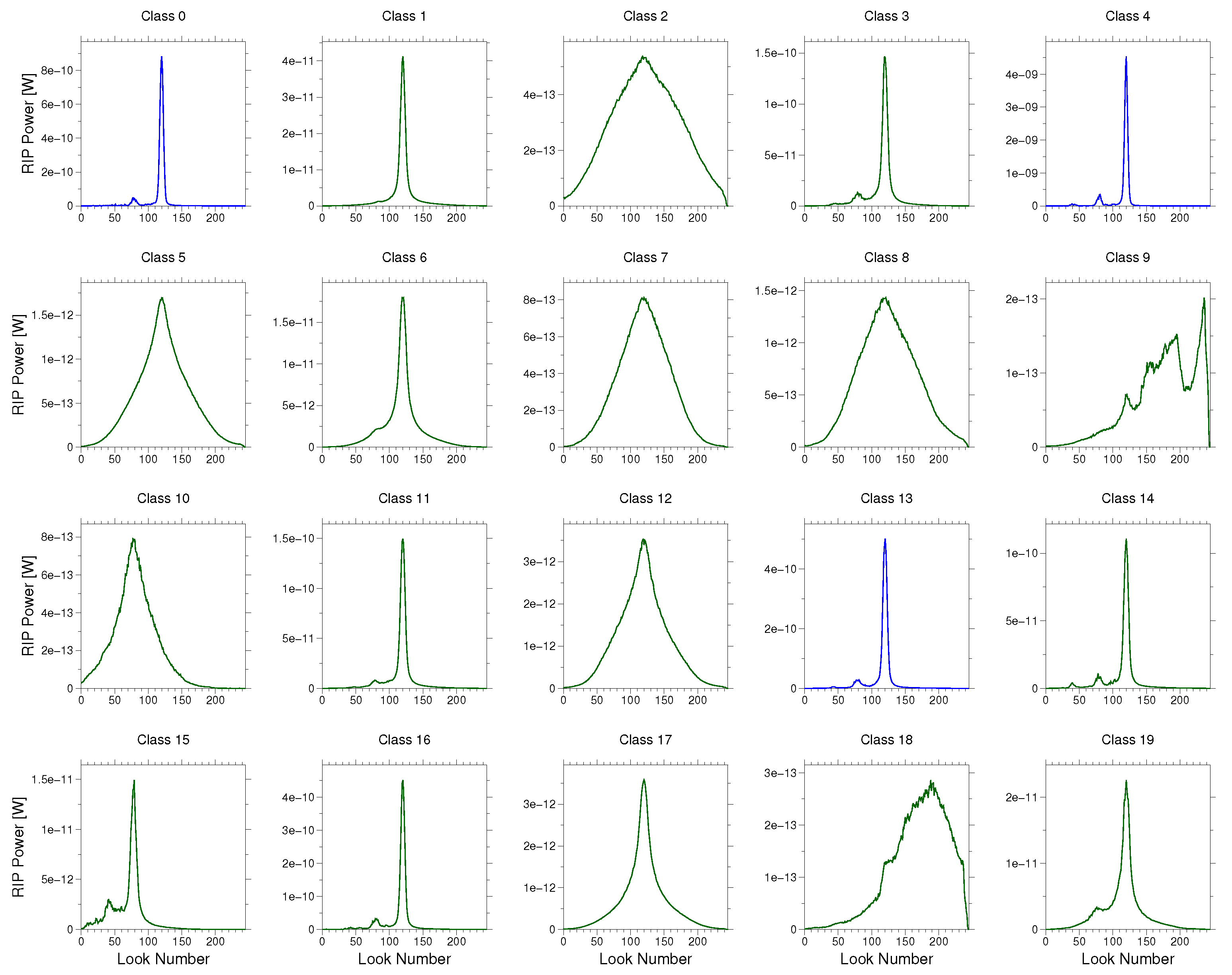
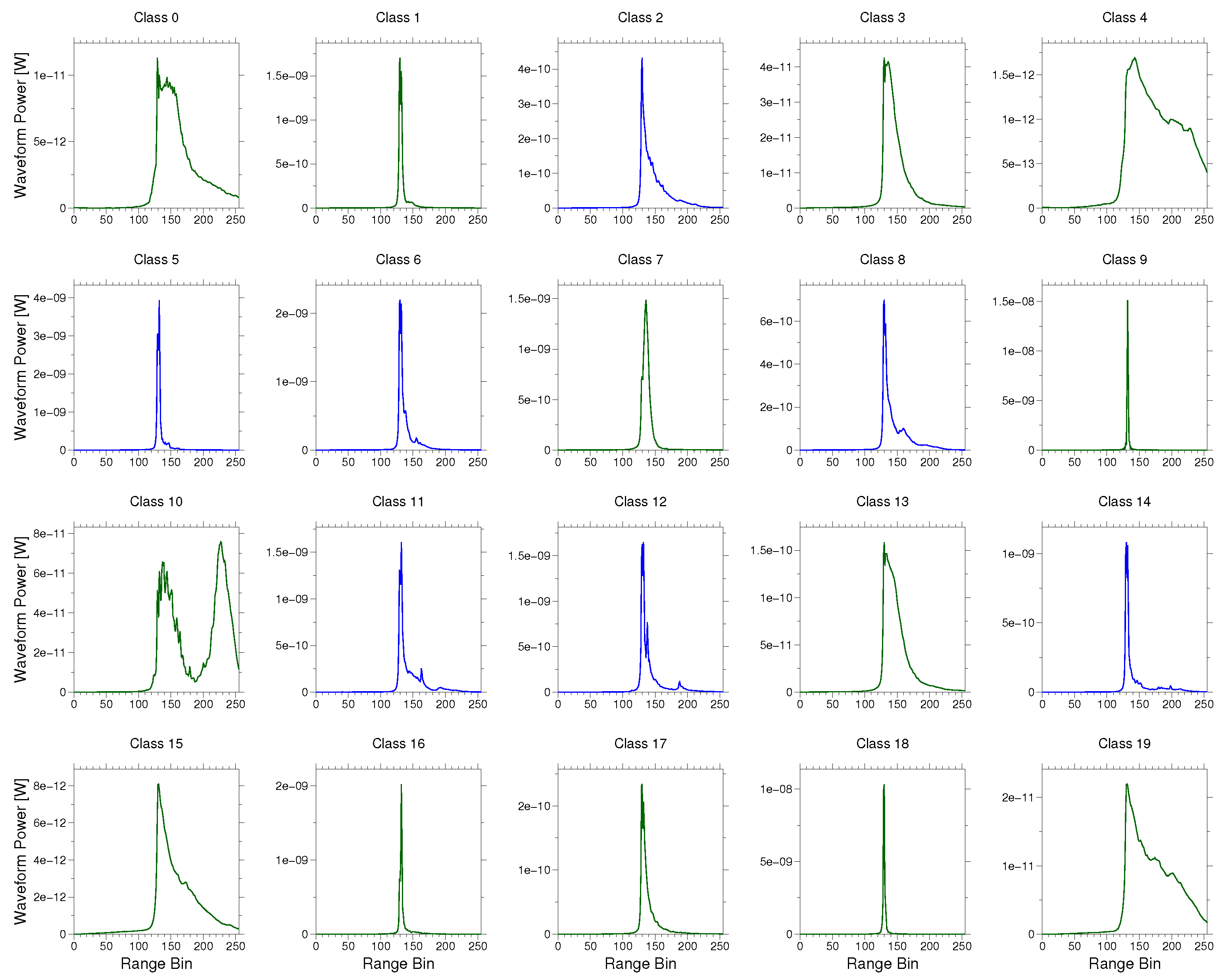
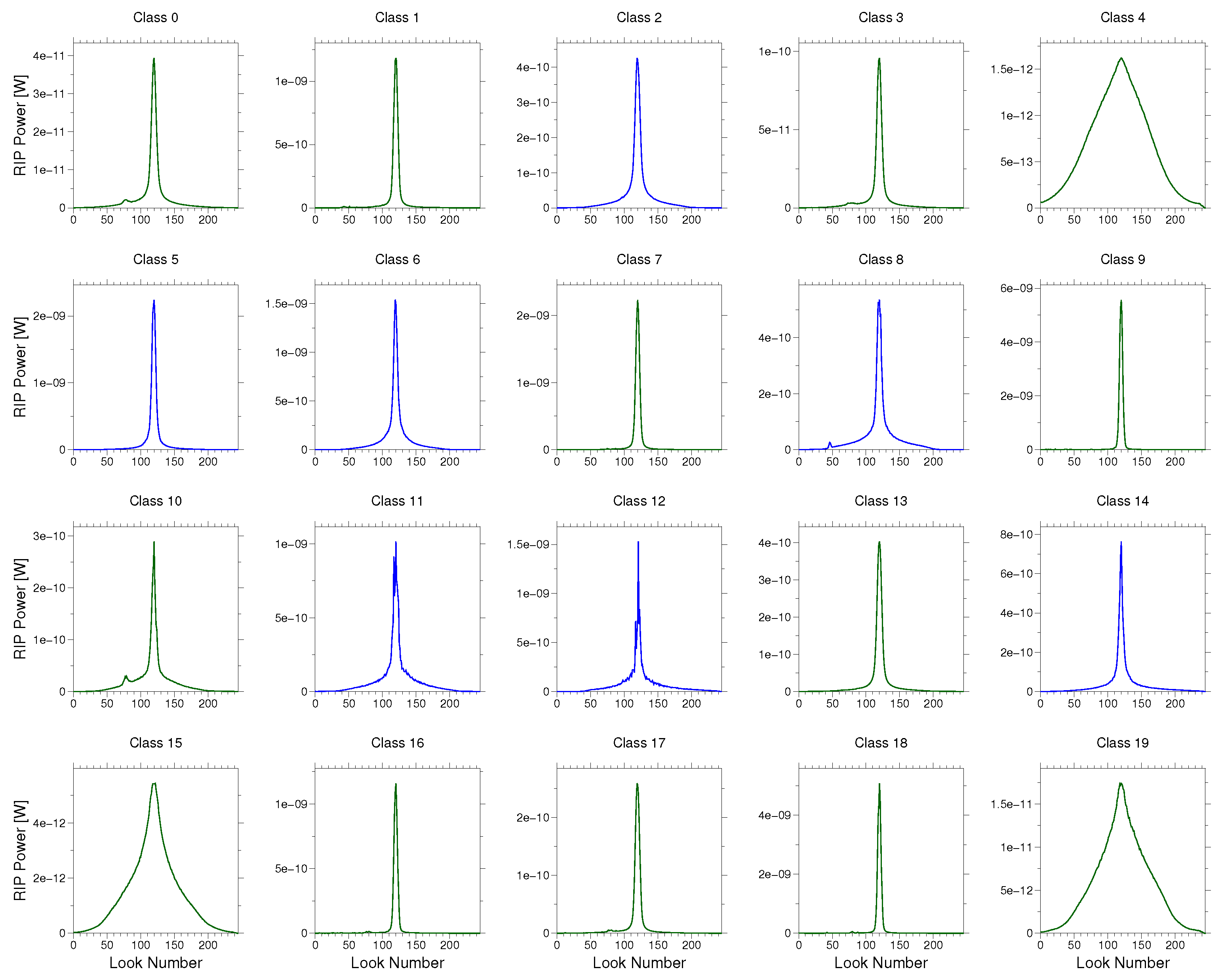
Appendix A. Mean Waveforms and RIPs




References
- Global Runoff Data Center. Long-Term Mean Monthly Discharges and Annual Characteristics of GRDC Stations; Technical Report; Federal Institute of Hydrology: Koblenz, Germany, 2013. [Google Scholar]
- Birkett, C.M. Contribution of the TOPEX NASA radar altimeter to the global monitoring of large rivers and wetlands. Water Resour. Res. 1998, 34, 1223–1239. [Google Scholar] [CrossRef]
- Santos da Silva, J.; Calmant, S.; Seyler, F.; Rotunno Filho, O.C.; Cochonneau, G.; Mansur, W.J. Water levels in the Amazon basin derived from the ERS-2 and ENVISAT radar altimetry missions. Remote Sens. Environ. 2010, 114, 2160–2181. [Google Scholar] [CrossRef]
- Schwatke, C.; Dettmering, D.; Bosch, W.; Seitz, F. DAHITI—An innovative approach for estimating water level time series over inland waters using multi-mission satellite altimetry. Hydrol. Earth Syst. Sci. 2015, 19, 4345–4364. [Google Scholar] [CrossRef]
- Boergens, E.; Dettmering, D.; Schwatke, C.; Seitz, F. Treating the Hooking Effect in satellite altimetry data: A case study along the Mekong River and its tributaries. Remote Sens. 2016, 8, 91. [Google Scholar] [CrossRef]
- Frappart, F.; Do Minh, K.; L’Hermitte, J.; Cazenave, A.; Ramillien, G.; Le Toan, T.; Mognard-Campbell, N. Water volume change in the lower Mekong from satellite altimetry and imagery data. Geophys. J. Int. 2006, 167, 570–584. [Google Scholar] [CrossRef]
- Biancamaria, S.; Frappart, F.; Leleu, A.S.; Marieu, V.; Blumstein, D.; Desjonquères, J.D.; Boy, F.; Sottolichio, A.; Valle-Levinson, A. Satellite radar altimetry water elevations performance over a 200 m wide river: Evaluation over the Garonne River. Adv. Space Res. 2016, 59, 1–19. [Google Scholar]
- Raney, R.K. The delay/doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Nielsen, K.; Stenseng, L.; Andersen, O.B.; Villadsen, H. Validation of CryoSat-2 SAR mode based lake levels. Remote Sens. Environ. 2015, 171, 162–170. [Google Scholar] [CrossRef]
- Kleinherenbrink, M.; Lindenbergh, R.C.; Ditmar, P.G. Monitoring of lake level changes on the Tibetan Plateau and Tian Shan by retracking Cryosat SARIn waveforms. J. Hydrol. 2015, 521, 119–131. [Google Scholar] [CrossRef]
- Göttl, F.; Dettmering, D.; Müller, F.L.; Schwatke, C. Lake level estimation based on CryoSat-2 SAR altimetry and multi-looked waveform classification. Remote Sens. 2016, 8, 1–16. [Google Scholar] [CrossRef]
- Villadsen, H.; Andersen, O.B.; Stenseng, L.; Nielsen, K.; Knudsen, P. CryoSat-2 altimetry for river level monitoring—Evaluation in the Ganges-Brahmaputra River basin. Remote Sens. Environ. 2015, 168, 80–89. [Google Scholar] [CrossRef]
- Bercher, N.; Dinardo, S.; Lucas, B.M.; Fleury, S.; Picot, N. A review of cryosat-2/siral applications for the monitoring of river water levels. ESA Living Planet 2013, 2013, 1–7. [Google Scholar]
- Berry, P.A.M.; Garlick, J.D.; Freeman, J.A.; Mathers, E.L. Global inland water monitoring from multi-mission altimetry. Geophys. Res. Lett. 2005, 32, 1–4. [Google Scholar] [CrossRef]
- Desai, S.; Chander, S.; Ganguly, D.; Chauhan, P.; Lele, P.; James, M. Waveform Classification and Water-Land Transition over the Brahmaputra River using SARAL/AltiKa & Jason-2 Altimeter. Indian Soc. Remote Sens. 2015, 43, 475–485. [Google Scholar]
- Dettmering, D.; Schwatke, C.; Boergens, E.; Seitz, F. Potential of ENVISAT Radar Altimetry for Water Level Monitoring in the Pantanal Wetland. Remote Sens. 2016, 8, 596. [Google Scholar] [CrossRef]
- Villadsen, H.; Deng, X.; Andersen, O.B.; Stenseng, L.; Nielsen, K.; Knudsen, P. Improved inland water levels from SAR altimetry using novel empirical and physical retrackers. J. Hydrol. 2016, 537, 234–247. [Google Scholar] [CrossRef]
- Armitage, T.W.K.; Davidson, M.W.J. Using the interferometric capabilities of the ESA CryoSat-2 mission to improve the accuracy of sea ice freeboard retrievals. IEEE Trans. Geosci. Remote Sens. 2014, 52, 529–536. [Google Scholar] [CrossRef]
- Wingham, D.J.; Francis, C.R.; Baker, S.; Bouzinac, C.; Brockley, D.; Cullen, R.; de Chateau-Thierry, P.; Laxon, S.W.; Mallow, U.; Mavrocordatos, C.; et al. CryoSat: A mission to determine the fluctuations in Earth’s land and marine ice fields. Adv. Space Res. 2006, 37, 841–871. [Google Scholar] [CrossRef]
- MacQueen, J. Some methods for classification and analysis of multivariate observations. Proc. Fifth Berkeley Symp. Math. Stat. Probab. 1967, 1, 281–297. [Google Scholar]
- Mekong River Commission (Ed.) Overview of the Hydrology of the Mekong Basin; Mekong River Commission: Phnom Penh, Cambodia, 2005. [Google Scholar]
- ESA. CryoSat-2 Geographical Mode Mask; ESA: Paris, France, 2016. [Google Scholar]
- Scagliola, M. CryoSat Footprints. 2013. Available online: https://earth.esa.int/documents/10174/125271/CryoSat_Footprints_TN_v1.1.pdf/2a5d996b-8b77-4d1c-ae7b-fbf93848c35d;jsessionid=B1FF8C50A1B0F2A0879F6FA028844644.eodisp-prod4040?version=1.0 (accessed on 23 November 2017).
- Cullen, R.A.; Wingham, D.J. CryoSat Level 1b Processing Algorithms and Simulation Results. In Proceedings of the 2002 IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; pp. 1762–1764. [Google Scholar]
- Laxon, S.W. Sea-Ice Altimeter Processing Scheme at the EODC. Int. J. Remote Sens. 1994, 15, 915–924. [Google Scholar] [CrossRef]
- Gommenginger, C.; Thibaut, P.; Fenoglio-Marc, L.; Quartly, G.; Deng, X.; Gómez-Enri, J.; Challenor, P.; Gao, Y. Retracking altimeter waveforms near the coasts. In Coastal Altimetry; Benveniste, J., Cipollini, P., Kostianoy, A.G., Vignudelli, S., Eds.; Springer: Berlin, Germany, 2011; pp. 61–101. [Google Scholar]
- Doane, D.P. Aesthetic frequency classifications. Am. Stat. 1976, 30, 181–183. [Google Scholar]
- Sturges, H. The choice of a class interval. J. Am. Stat. Assoc. 1926, 21, 65–66. [Google Scholar] [CrossRef]
- Mekong River Commision. Annual Mekong Flood Report 2008; Mekong River Commission: Phnom Penh, Cambodia, 2009. [Google Scholar]
- Lehner, B.; Verdin, K.; Jarvis, A. New global hydrography derived from spaceborne elevation data. Eos 2008, 89, 93–94. [Google Scholar] [CrossRef]
- Boergens, E.; Buhl, S.; Dettmering, D.; Klüppelberg, C.; Seitz, F. Combination of multi-mission altimetry data along the Mekong River with spatio-temporal kriging. J. Geodesy 2017, 91, 519–534. [Google Scholar] [CrossRef]
- Schneider, R.; Nygaard Godiksen, P.; Villadsen, H.; Madsen, H.; Bauer-Gottwein, P. Application of CryoSat-2 altimetry data for river analysis and modelling. Hydrol. Earth Syst. Sci. 2017, 21, 751–764. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RIP Features | Waveform Features |
|---|---|
| Peakiness: | |
| Standard deviation: | Maximum power: |
| Width: w | Relative position of leading edge |
| Off-center: | |
| Symmetry: s |
| Second Classification | |||
|---|---|---|---|
| Water | No Water | ||
| First Classification | Water | 7321 | 205 |
| No water | 423 | 22,660 | |
| Median (m) | Mean (m) | Standard Deviation (m) | |
|---|---|---|---|
| Whole study area | |||
| CryoSat-2 classification | 0.76 | 1.43 | 1.59 |
| CryoSat-2 land–water mask | 0.83 | 1.86 | 4.55 |
| Gauge | 0.45 | 0.82 | 1.09 |
| Envisat | 0.96 | 1.42 | 1.44 |
| Upstream region | |||
| CryoSat-2 classification | 0.79 | 1.54 | 1.70 |
| CryoSat-2 land–water mask | 0.85 | 2.00 | 5.44 |
| Gauge | 0.42 | 0.72 | 1.05 |
| Envisat | 1.01 | 1.46 | 1.49 |
| Middle region | |||
| CryoSat-2 classification | 0.76 | 1.15 | 1.10 |
| CryoSat-2 land–water mask | 0.84 | 1.55 | 1.87 |
| Gauge | 0.54 | 1.00 | 1.14 |
| Envisat | 0.81 | 1.26 | 1.26 |
| Upstream Region | Middle Region | |||
|---|---|---|---|---|
| No. of Water Levels | % of Outliers | No. of Water Levels | % of Outliers | |
| Classification approach | 1703 | 2 | 520 | 2 |
| Land–water mask approach | 1534 | 7 | 1364 | 4 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boergens, E.; Nielsen, K.; Andersen, O.B.; Dettmering, D.; Seitz, F. River Levels Derived with CryoSat-2 SAR Data Classification—A Case Study in the Mekong River Basin. Remote Sens. 2017, 9, 1238. https://doi.org/10.3390/rs9121238
Boergens E, Nielsen K, Andersen OB, Dettmering D, Seitz F. River Levels Derived with CryoSat-2 SAR Data Classification—A Case Study in the Mekong River Basin. Remote Sensing. 2017; 9(12):1238. https://doi.org/10.3390/rs9121238
Chicago/Turabian StyleBoergens, Eva, Karina Nielsen, Ole Baltazar Andersen, Denise Dettmering, and Florian Seitz. 2017. "River Levels Derived with CryoSat-2 SAR Data Classification—A Case Study in the Mekong River Basin" Remote Sensing 9, no. 12: 1238. https://doi.org/10.3390/rs9121238
APA StyleBoergens, E., Nielsen, K., Andersen, O. B., Dettmering, D., & Seitz, F. (2017). River Levels Derived with CryoSat-2 SAR Data Classification—A Case Study in the Mekong River Basin. Remote Sensing, 9(12), 1238. https://doi.org/10.3390/rs9121238