
Rebuilding Long Time Series Global Soil Moisture Products Using the Neural Network Adopting the Microwave Vegetation Index



Abstract
:
1. Introduction
2. Used Data and Methods
2.1. Used Data
2.1.1. SMOS Data
2.1.2. AMSR-E Data
2.1.3. AMSR2 Data
2.1.4. In Situ Network Data
2.2. Methods
2.2.1. The BPNN Method
2.2.2. Input Layer Selection
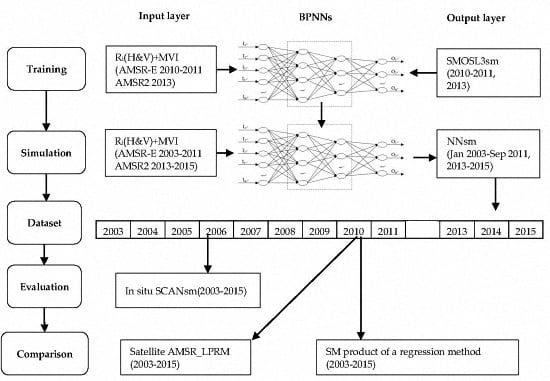
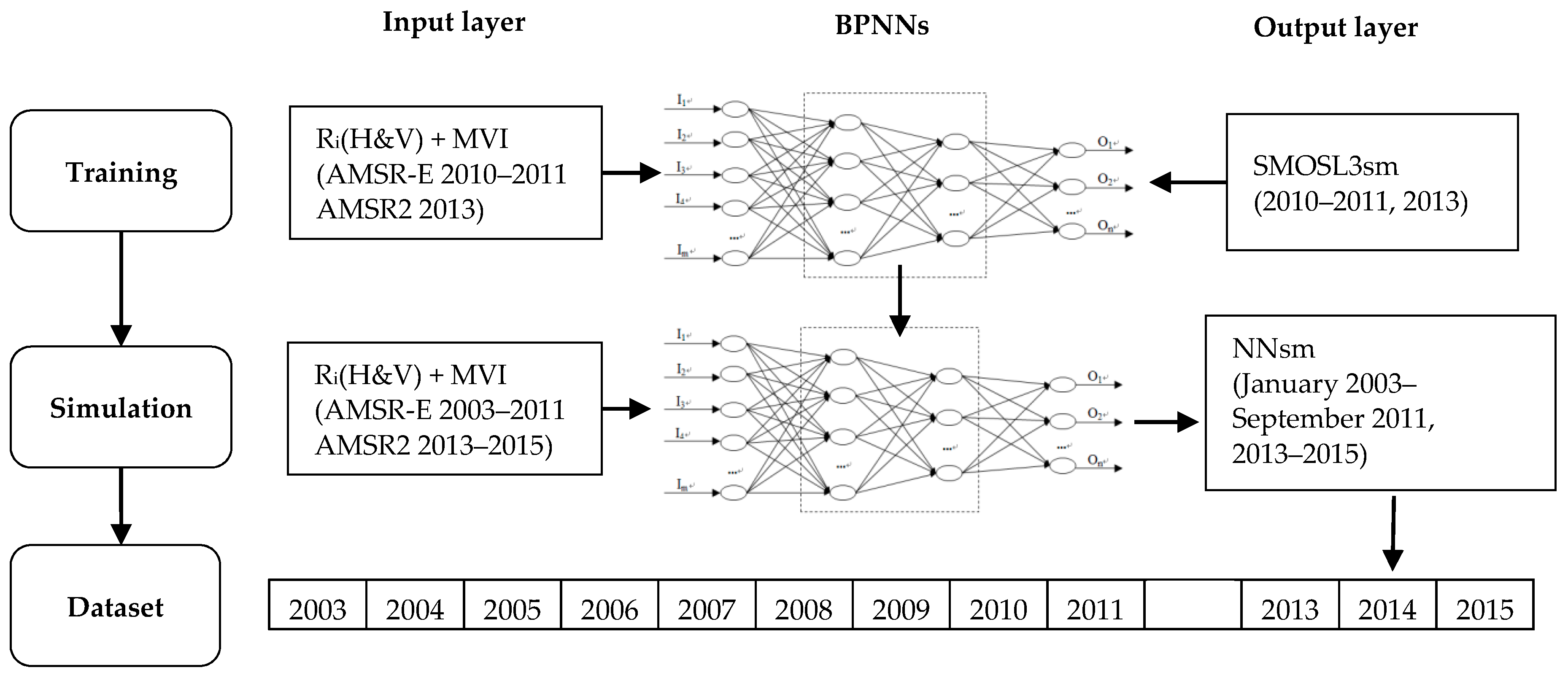
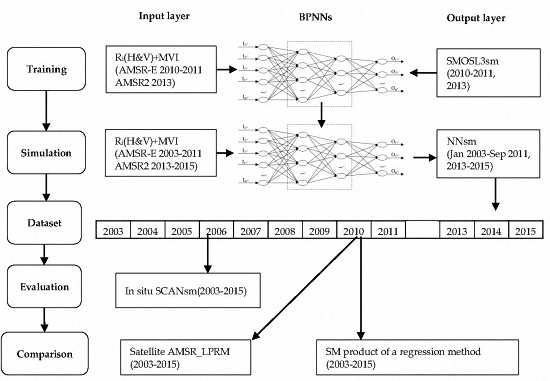
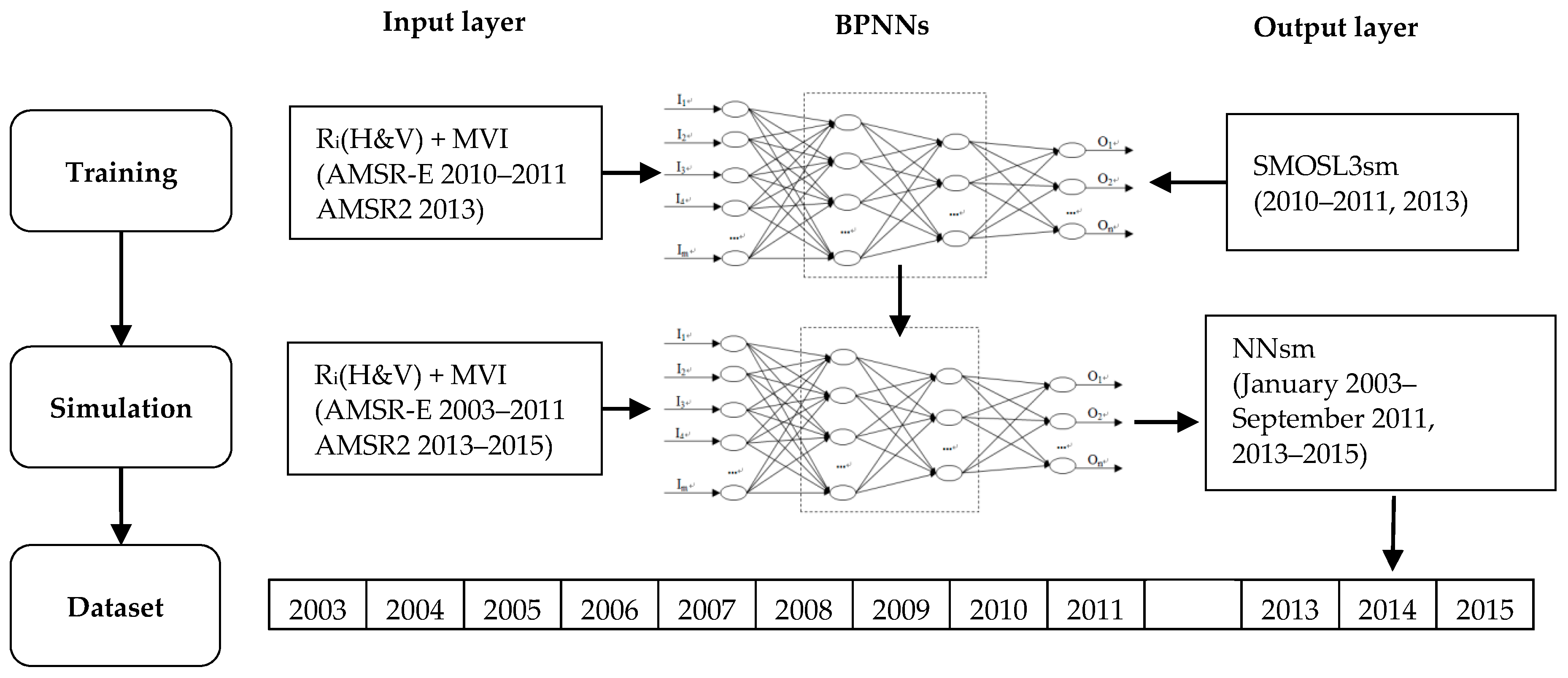
2.2.3. BPNN Training
2.2.4. Development of the NNsm Product
2.2.5. Evaluation of NNsm Product
3. Results and Analysis
3.1. BPNN Training Results
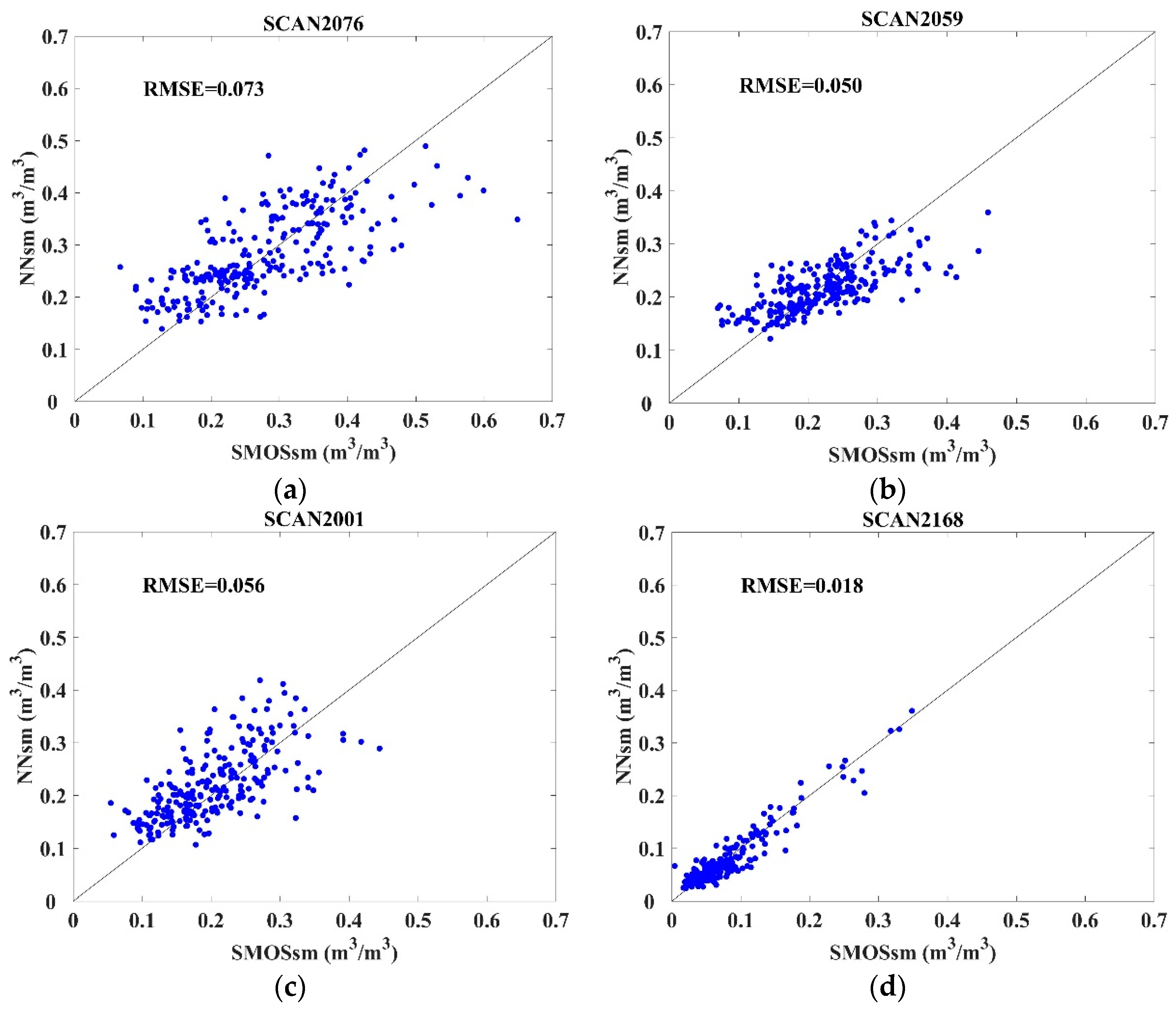
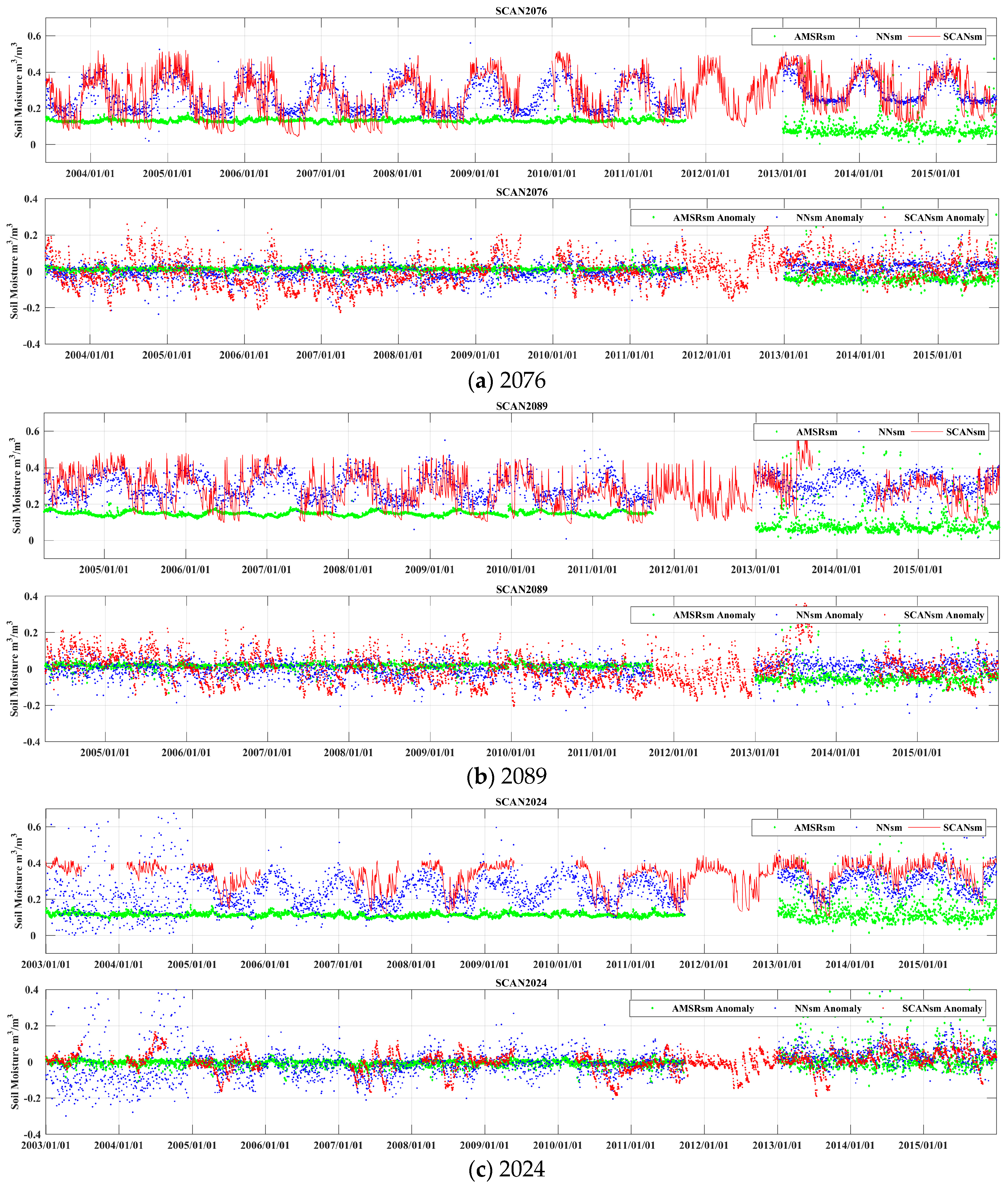
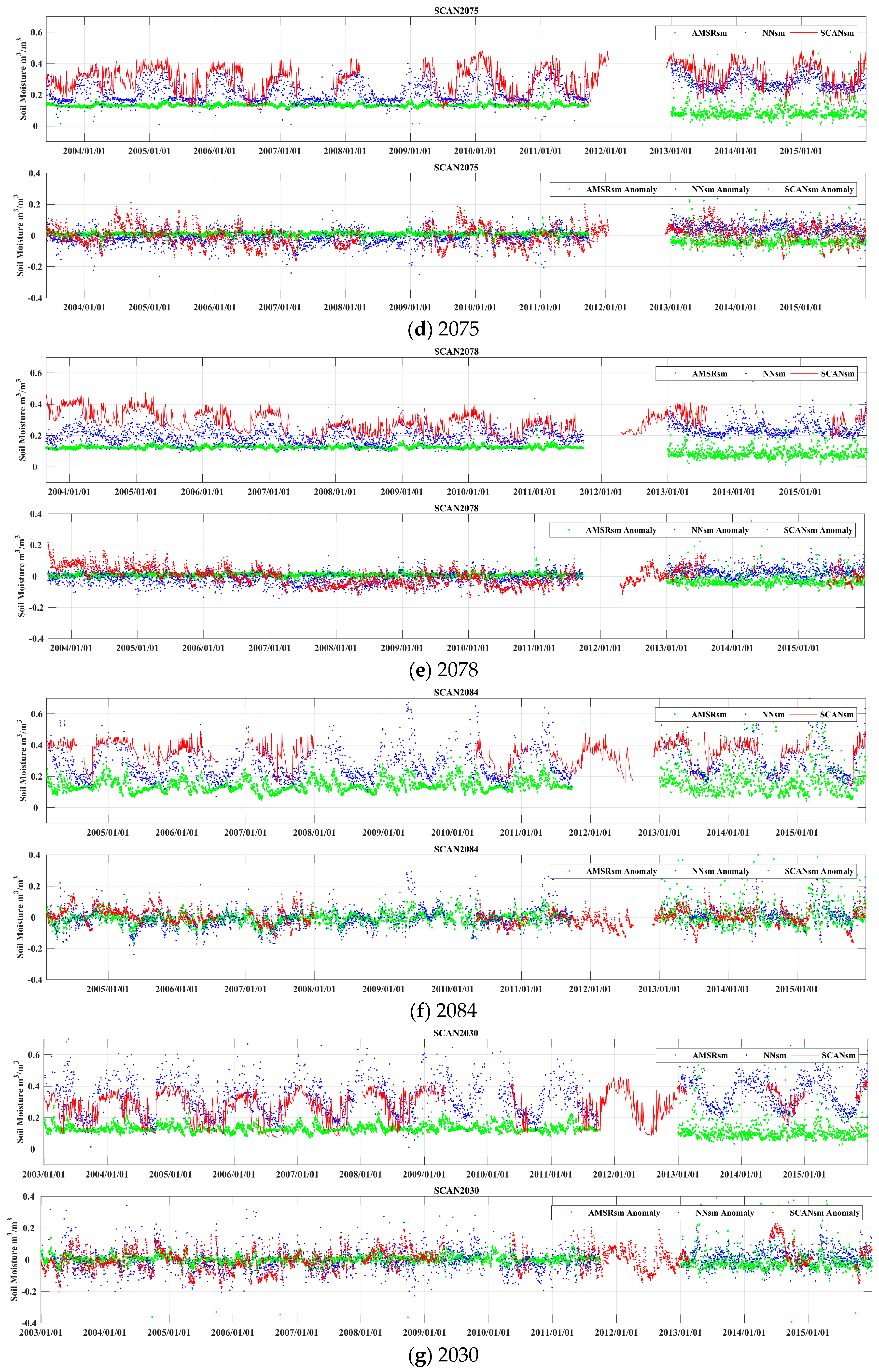
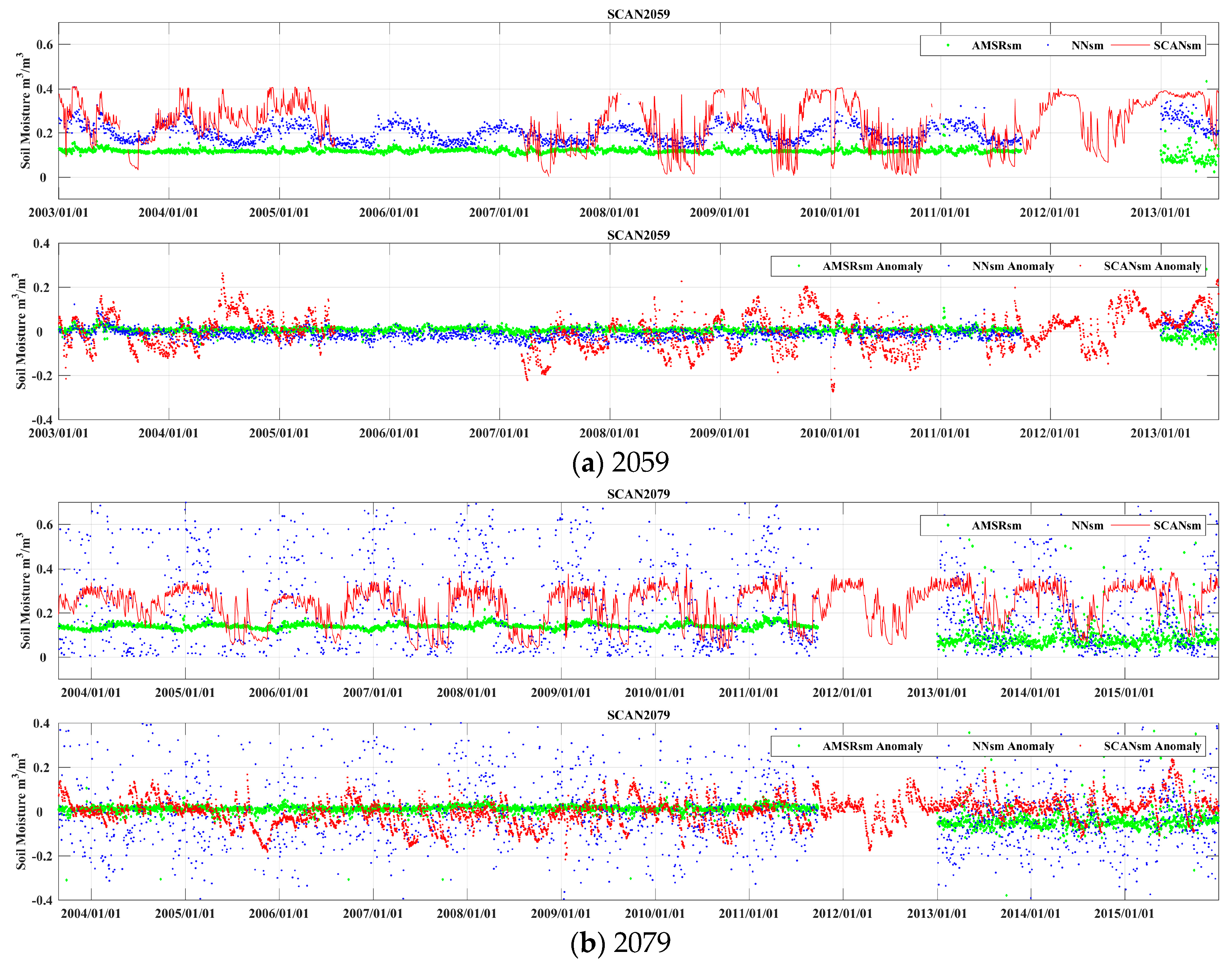
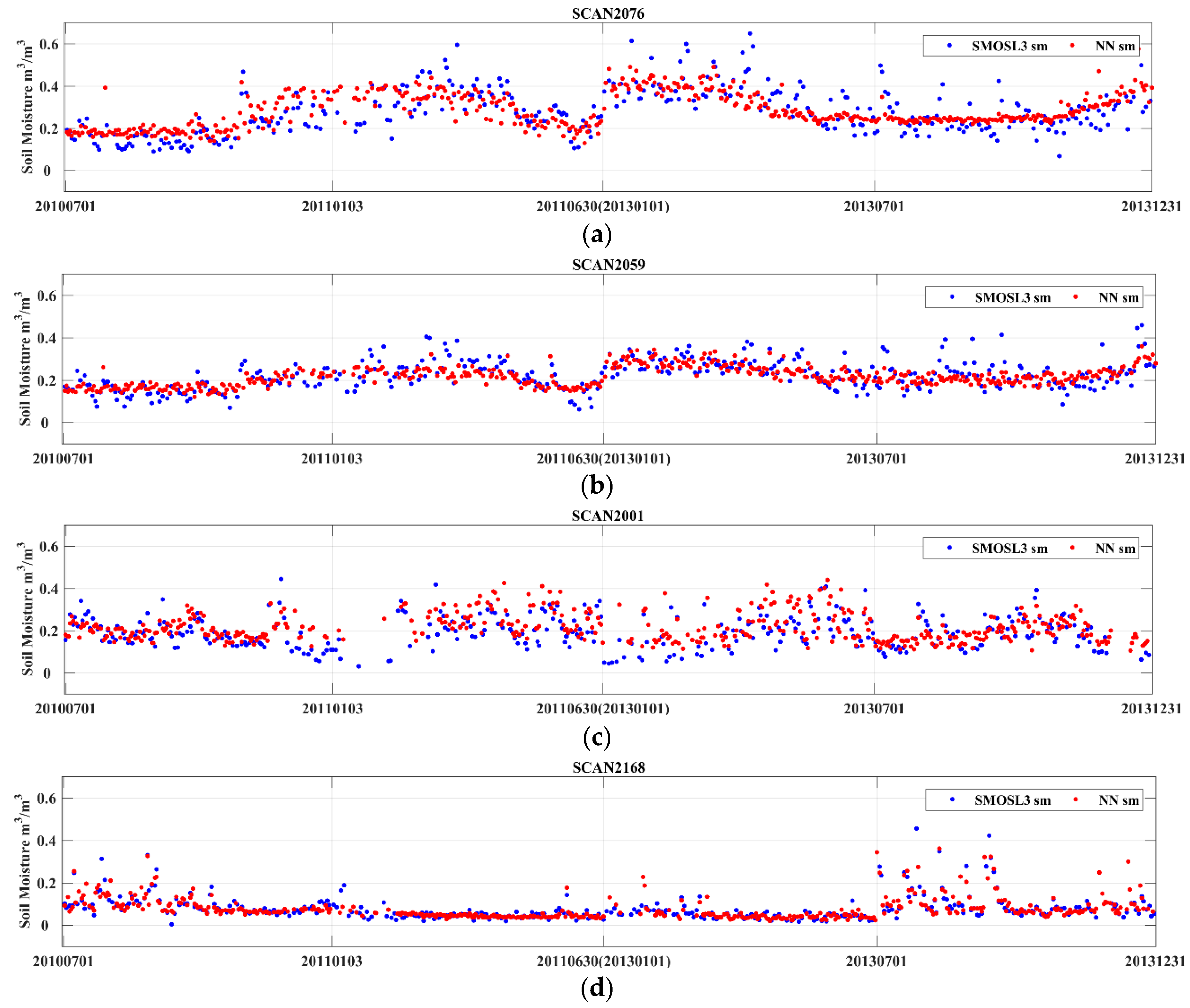
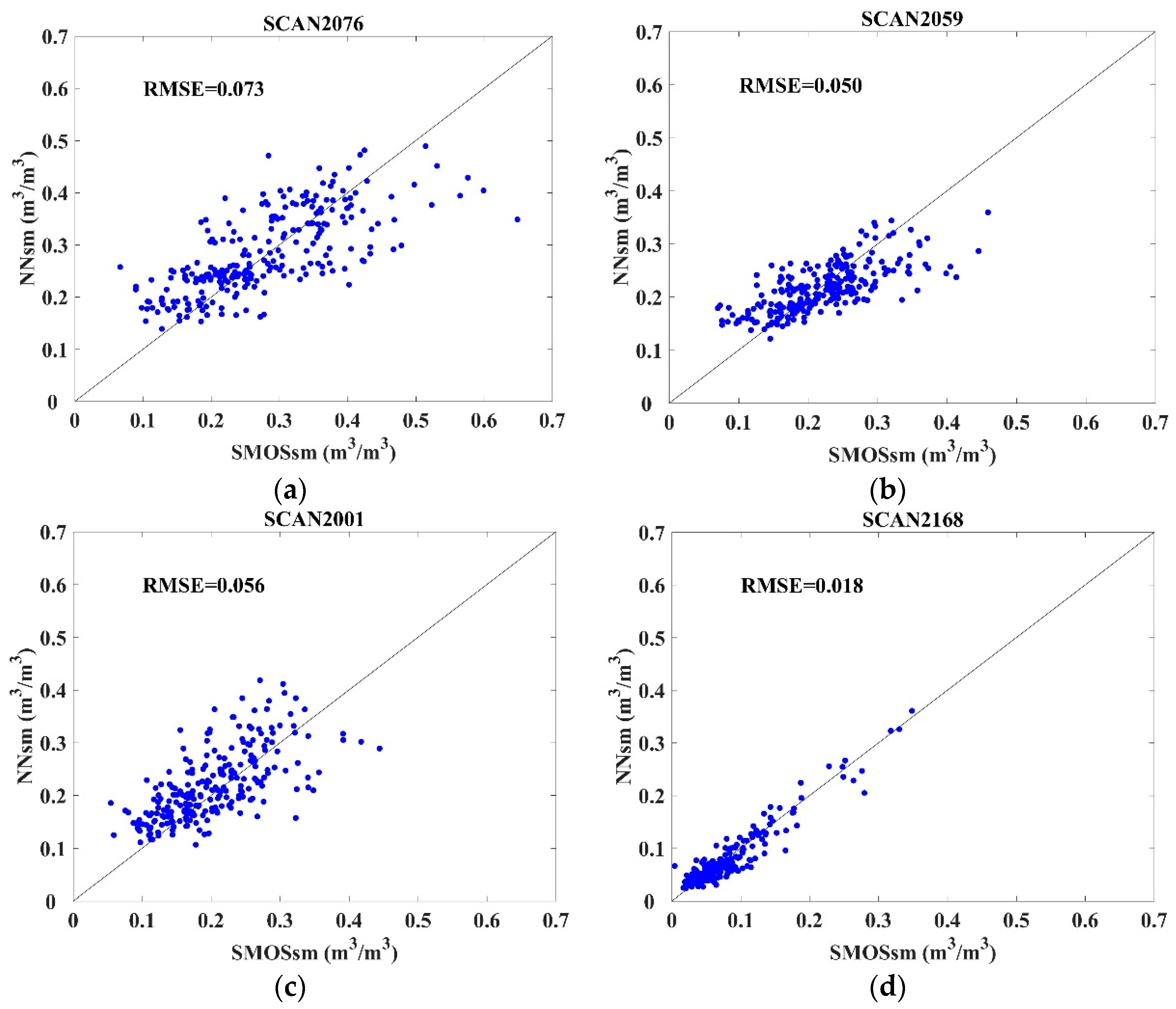
3.2. NNsm Products and Evaluation
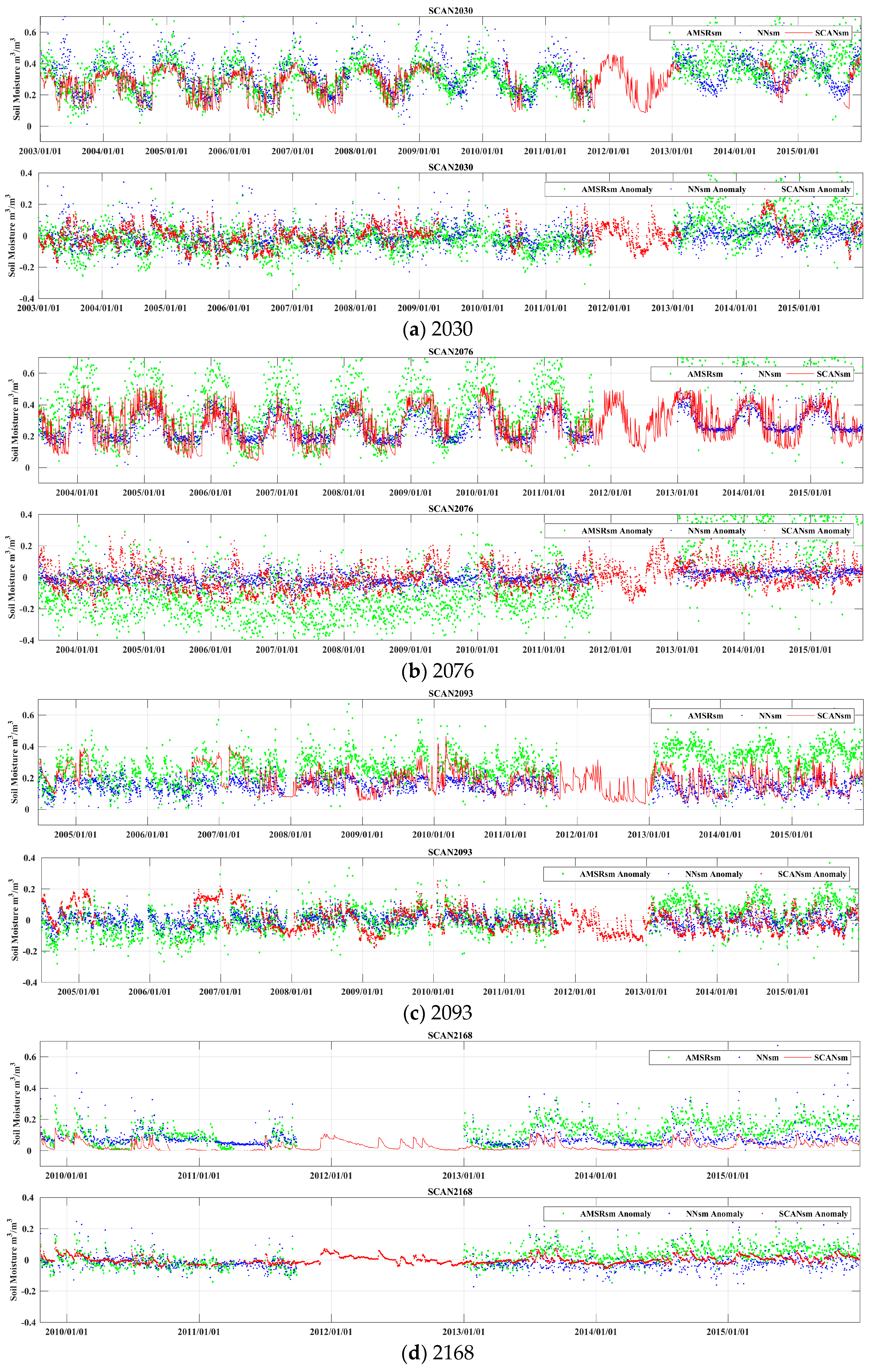
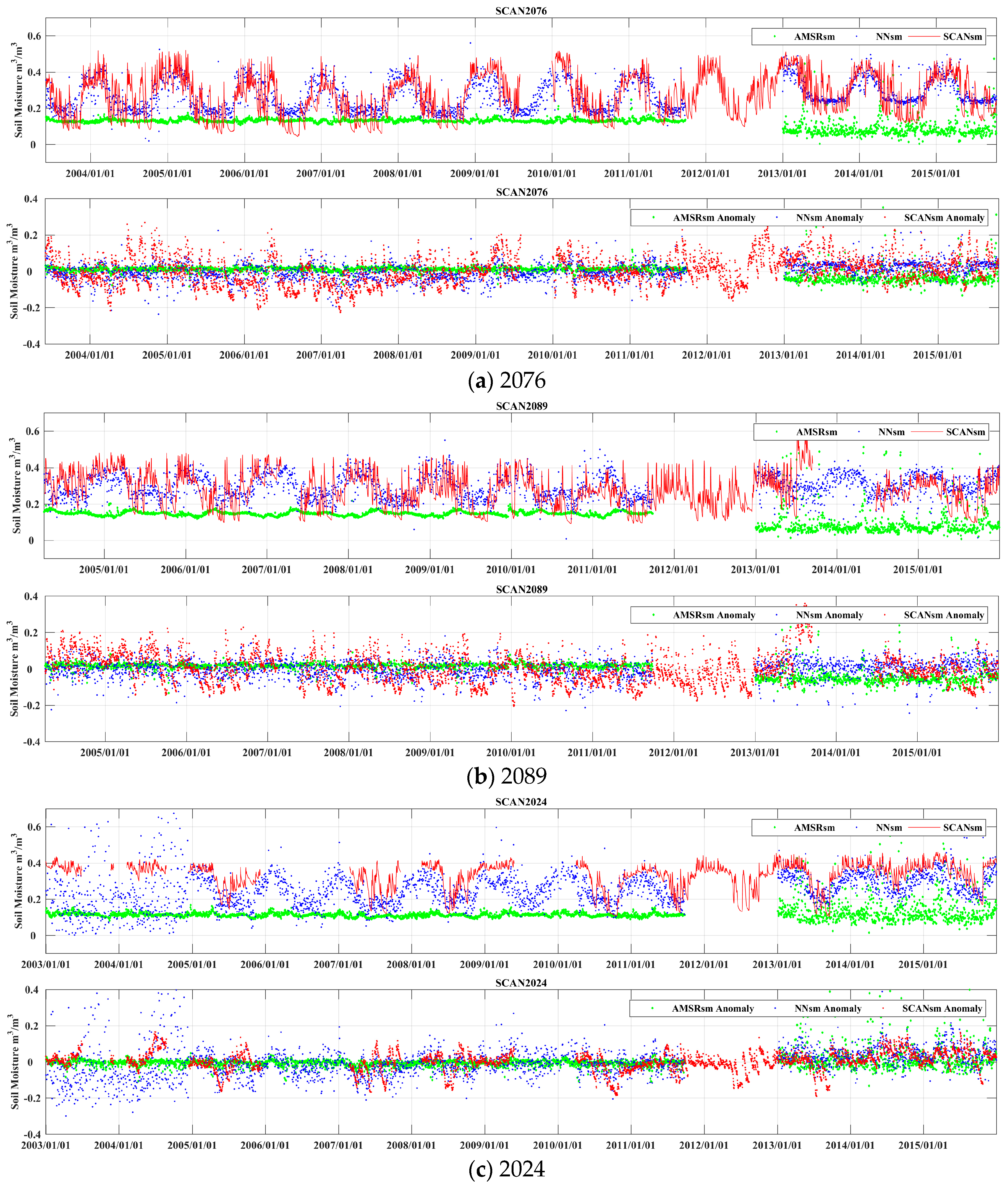
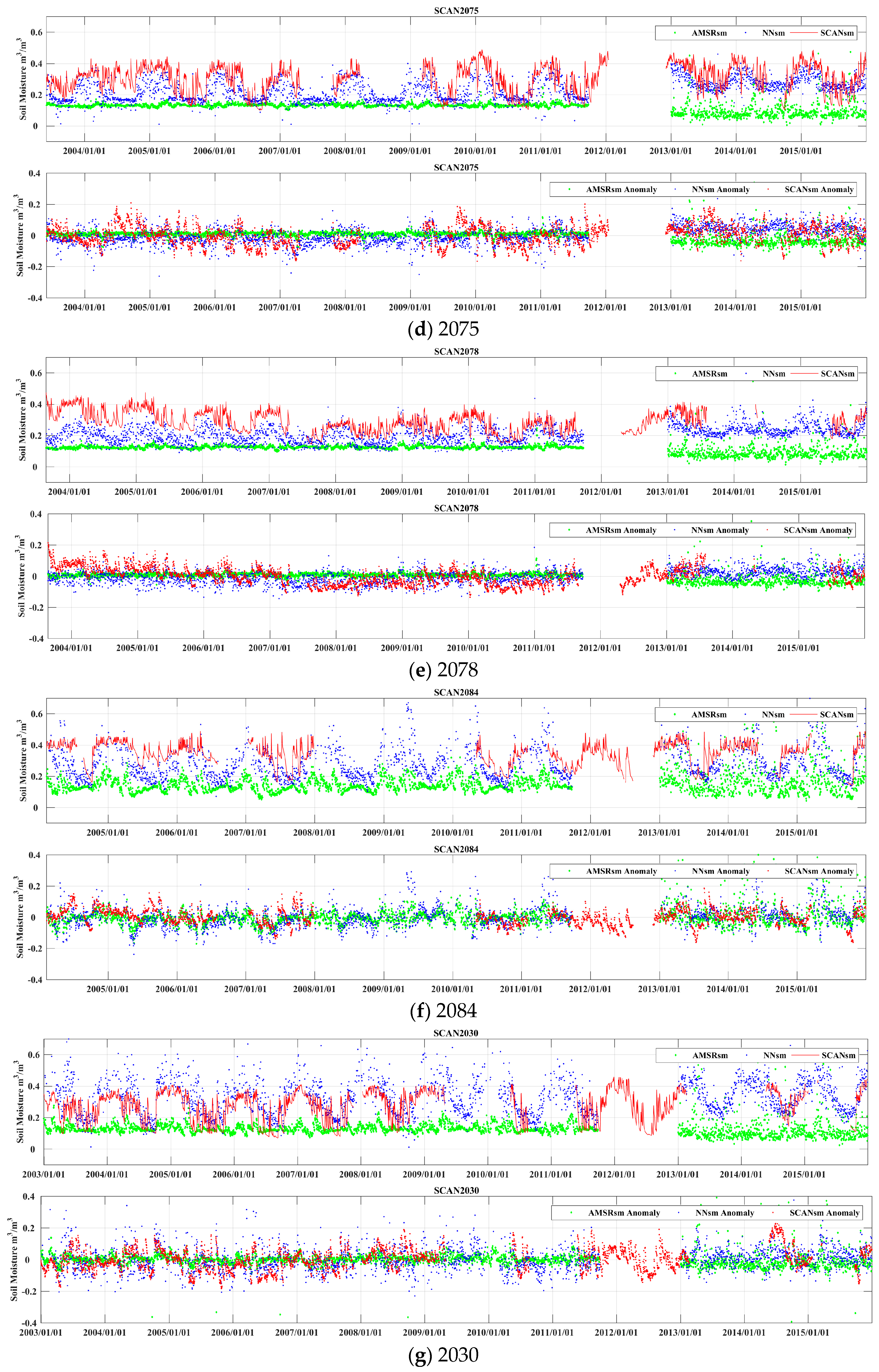
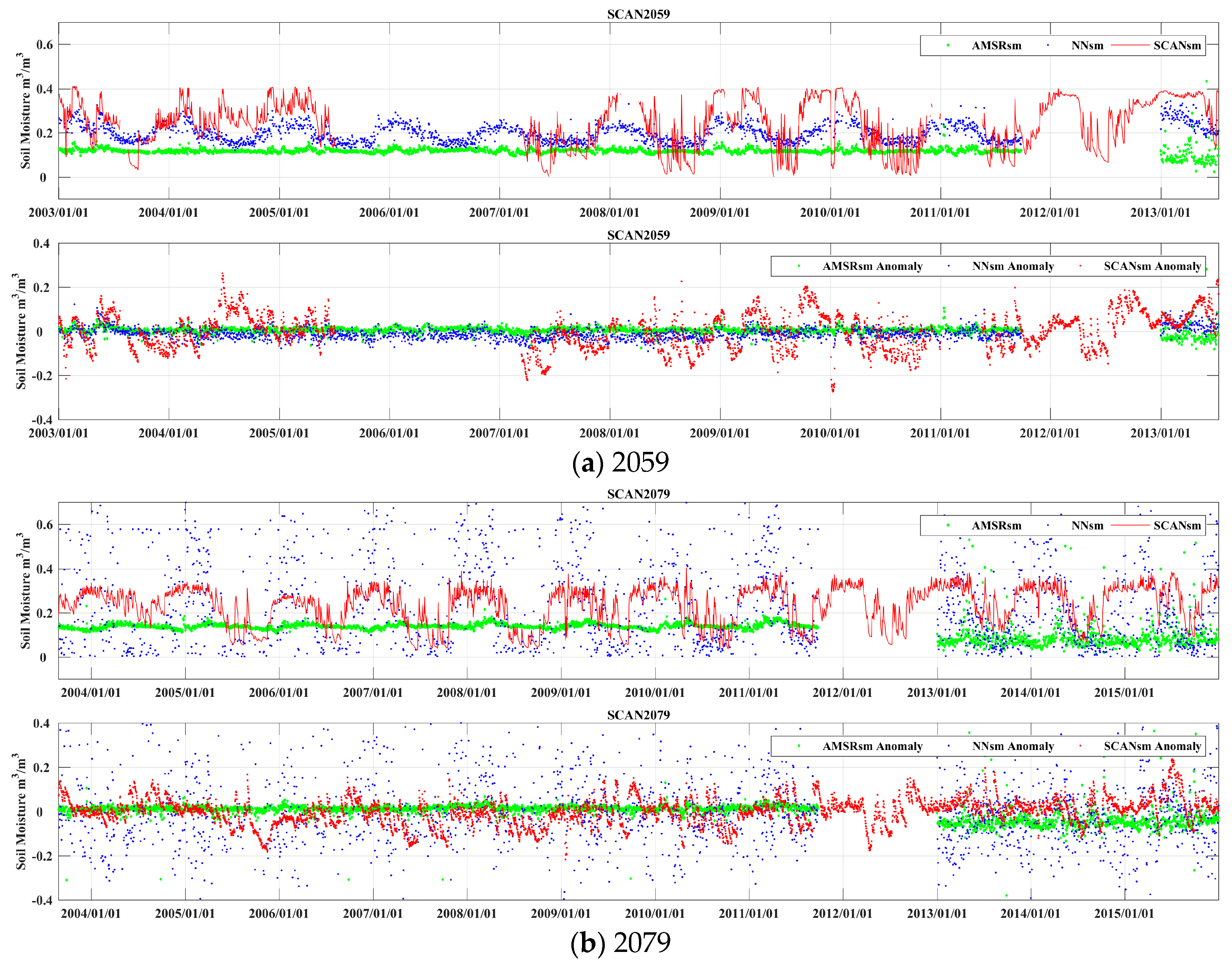
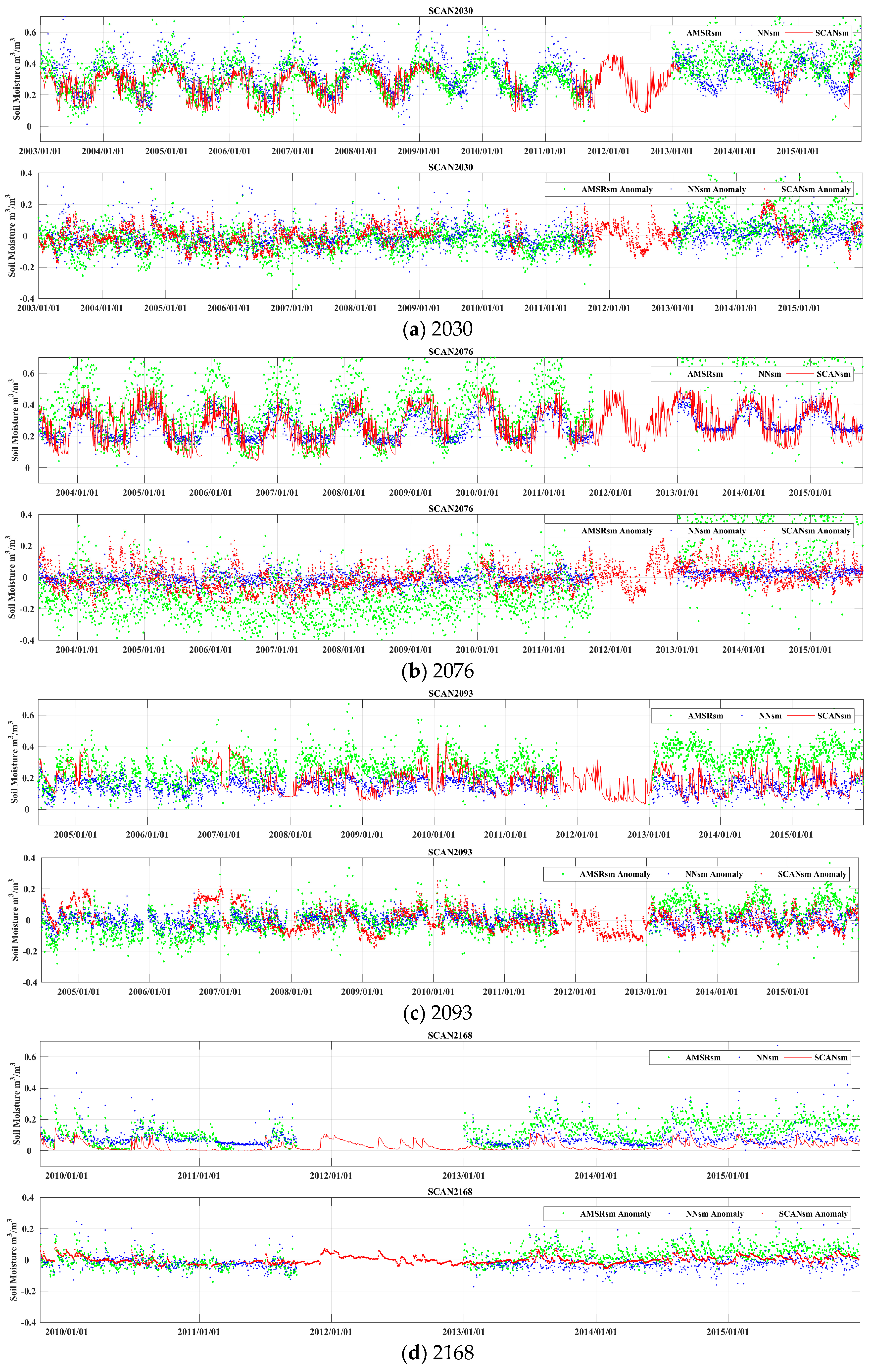
3.2.1. Sites with Strong Interannual Variations
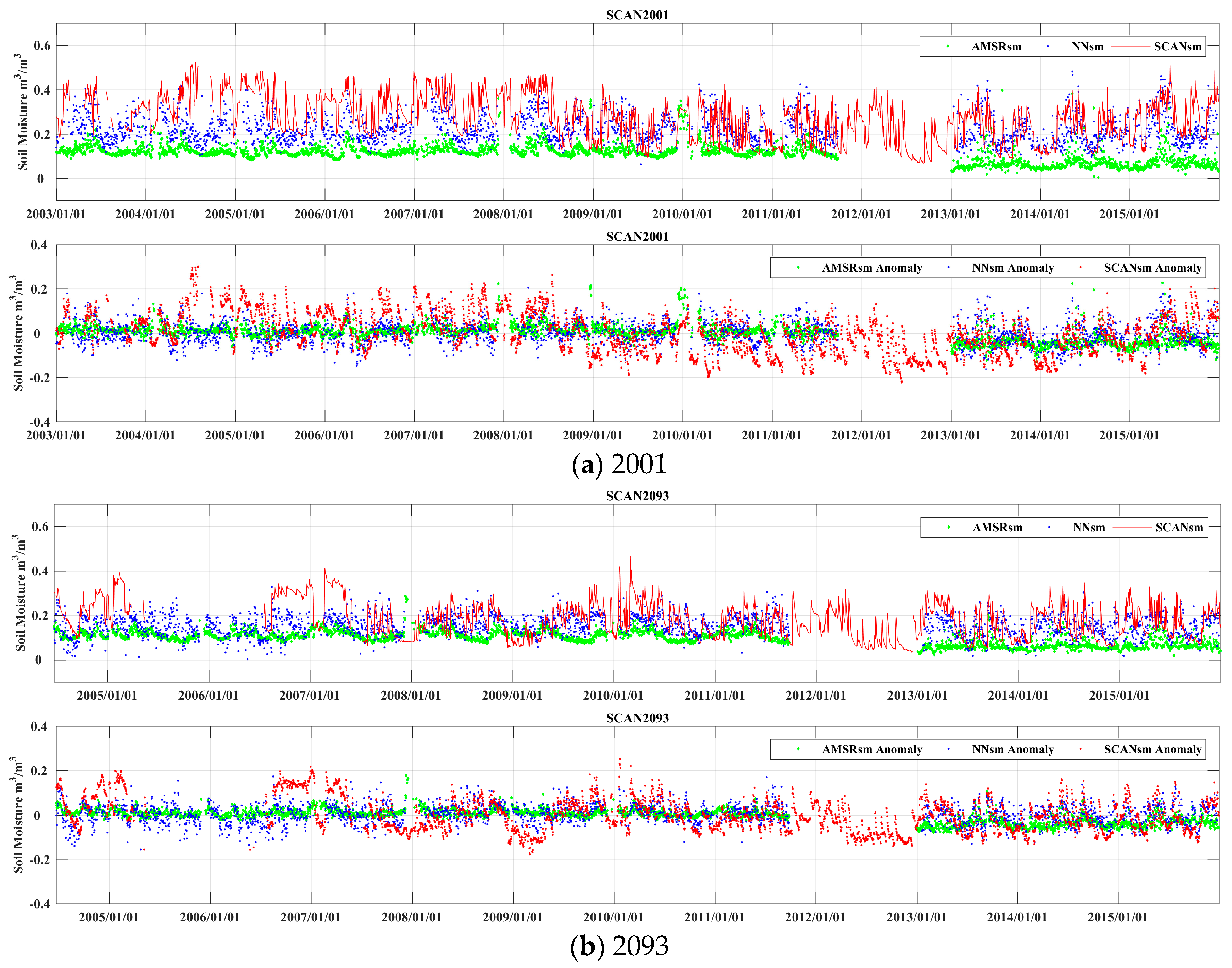
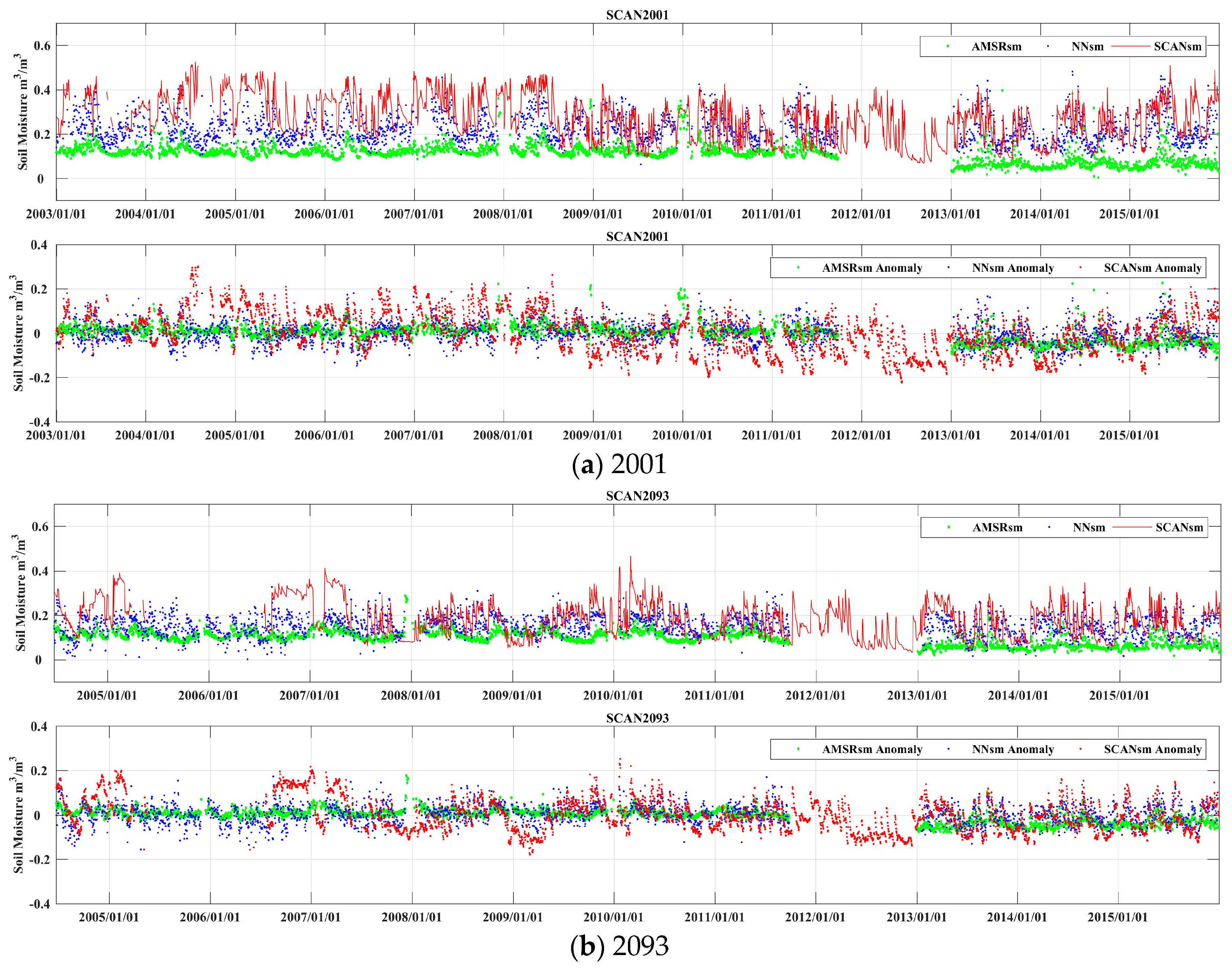
3.2.2. Sites with Weak Interannual Variations
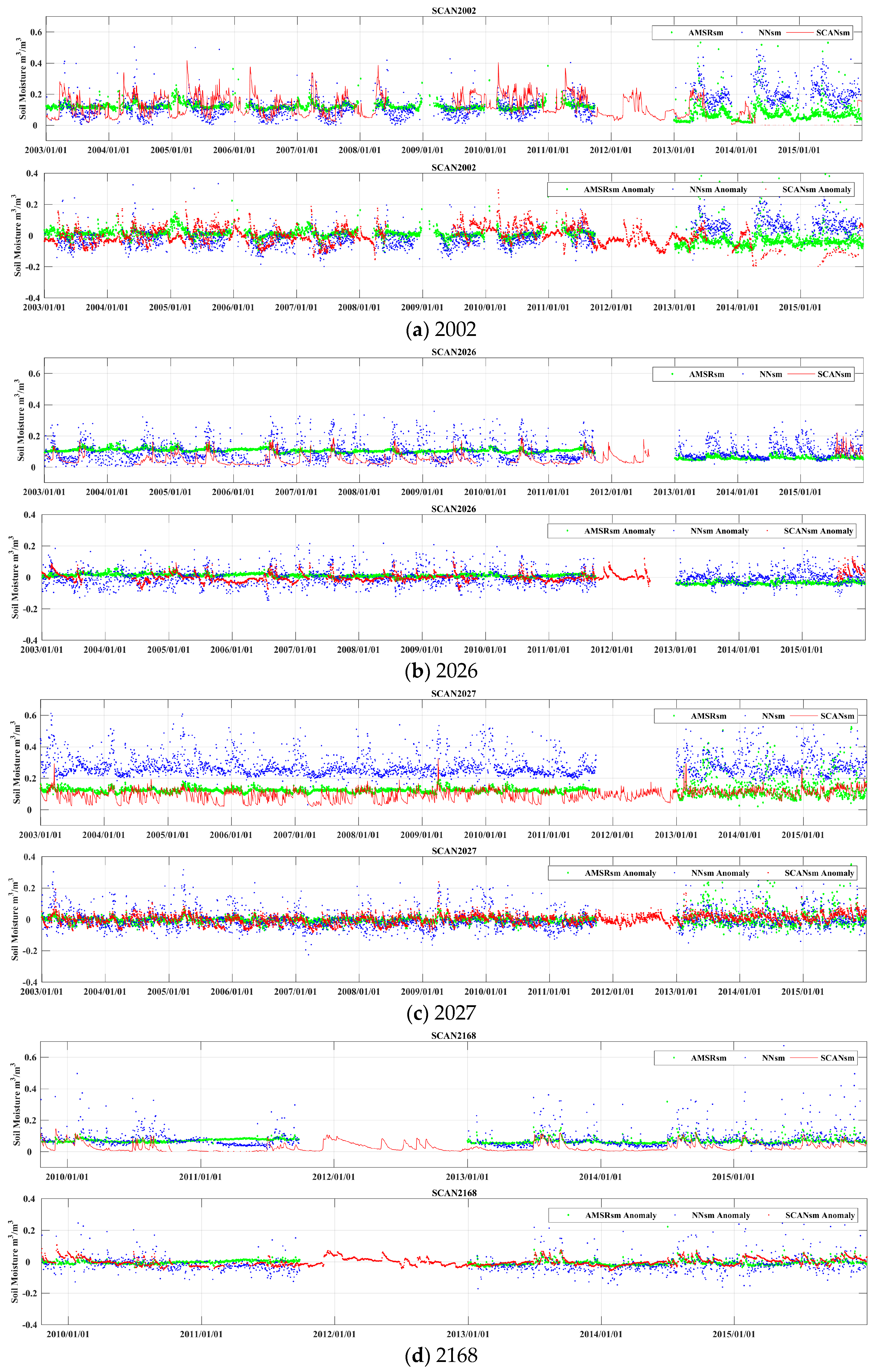
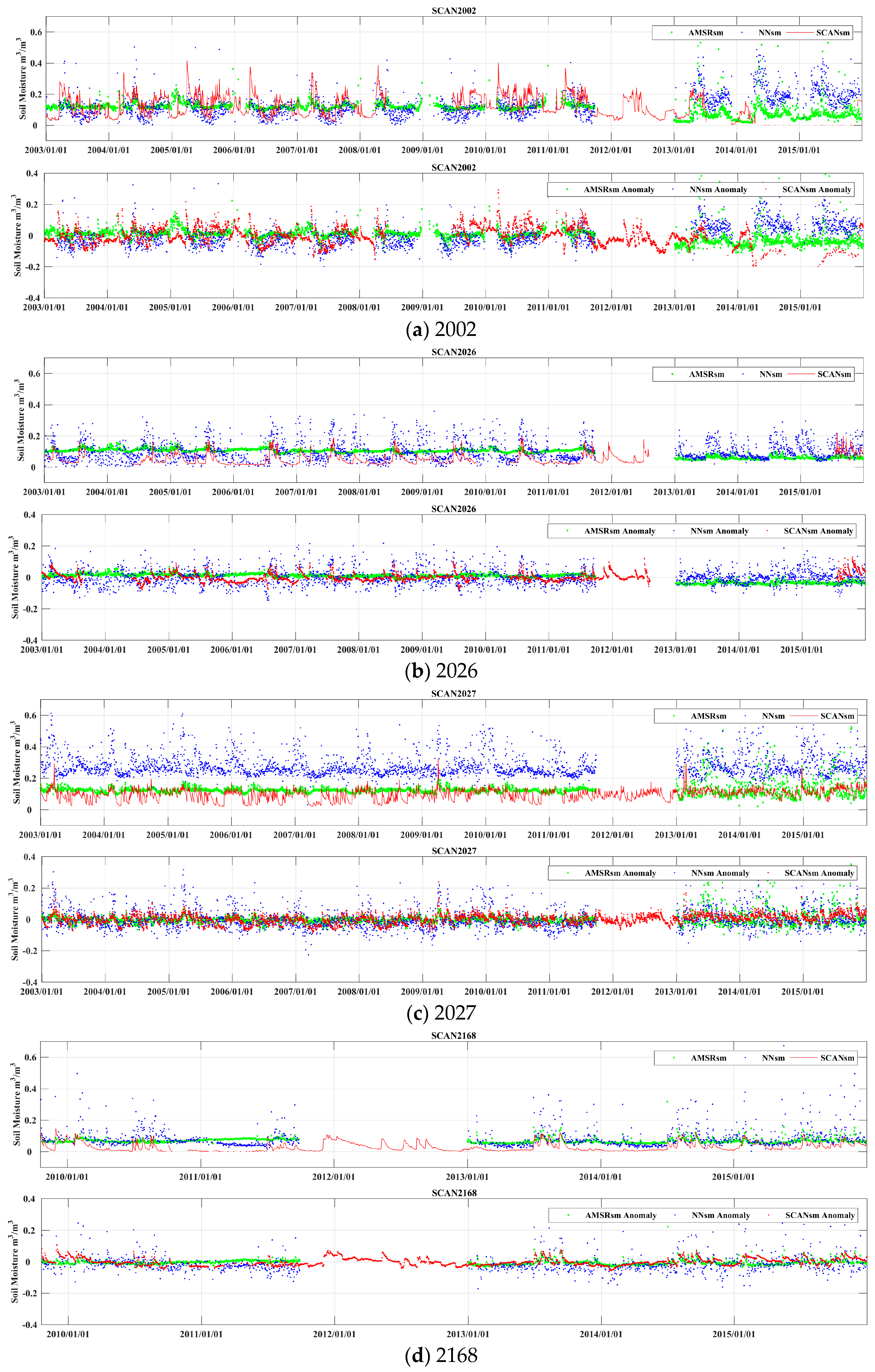
3.2.3. Sites in Semi-Arid Areas
4. Comparison and Discussion
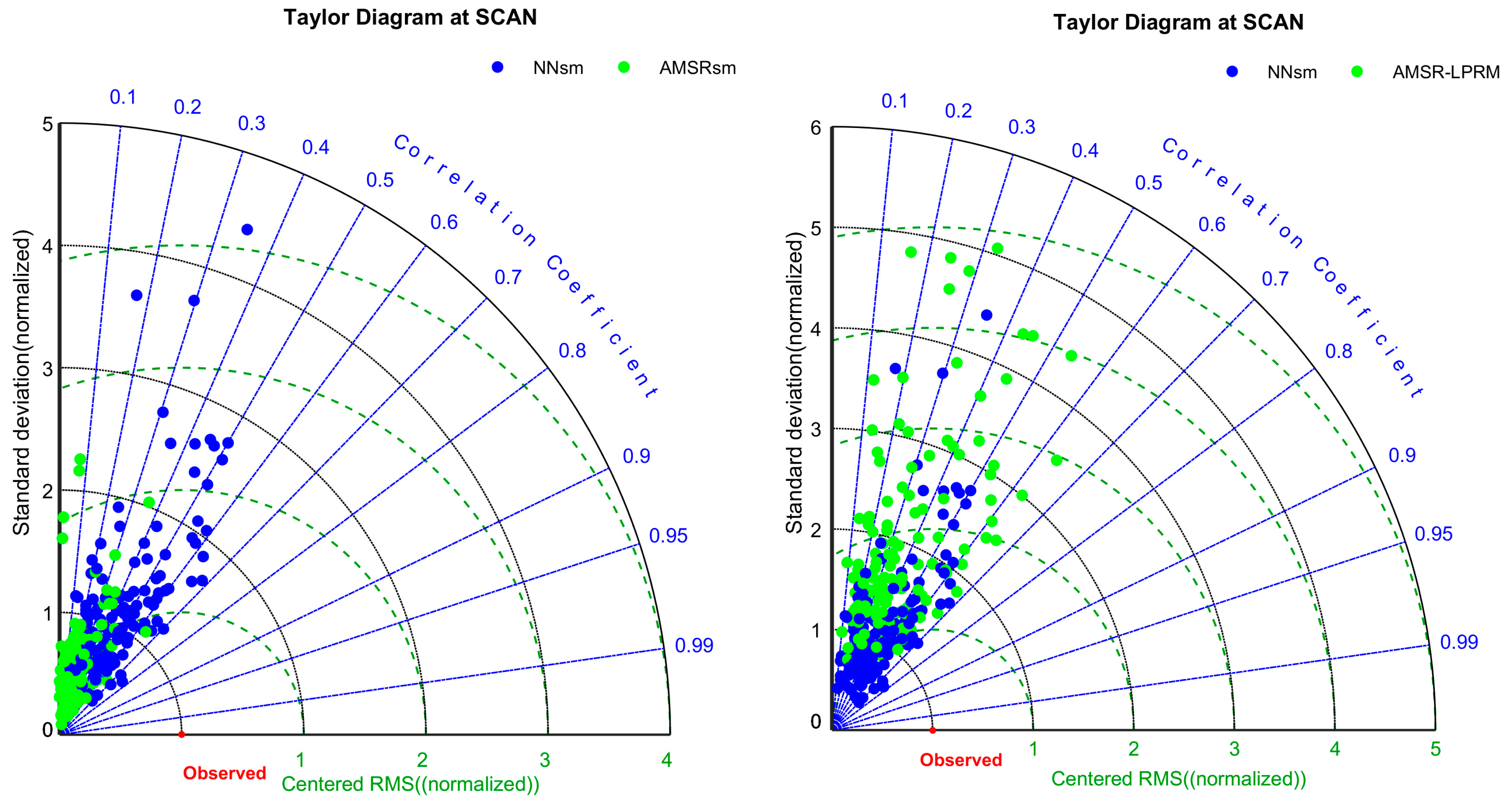
4.1. Comparing with Satellite Products
4.2. Comparing with a Regression Method
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The soil moisture active passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Calvet, J.C.; Pellarin, T.; Van de Griend, A.A.; Berger, M.; Ferrazzoli, P. Retrieving near-surface soil moisture from microwave radiometric observations: Current status and future plans. Remote Sens. Environ. 2003, 85, 489–506. [Google Scholar] [CrossRef]
- Fang, B.; Lakshmi, V. Soil moisture at watershed scale: Remote sensing techniques. J. Hydrol. 2014, 516, 258–272. [Google Scholar] [CrossRef]
- Fang, B. Disaggregation of Passive Microwave Soil Moisture for Use in Watershed Hydrology Applications. Ph.D. Thesis, University of South Carolina, Columbia, SC, USA, 2015. [Google Scholar]
- Su, Z.; Yacob, A.; Wen, J.; Roerink, G.; He, Y.; Gao, B.; Boogaard, H.; van Diepen, C. Assessing relative soil moisture with remote sensing data: Theory, experimental validation, and application to drought monitoring over the North China Plain. Phys. Chem. Earth Parts A/B/C 2003, 28, 89–101. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef]
- Zhang, D.; Anthes, R.A. A high-resolution model of the planetary boundary layer-sensitivity tests and comparisons with SESAME-79 data. J. Appl. Meteorol. 1982, 21, 1594–1609. [Google Scholar] [CrossRef]
- Houser, P.R.; Shuttleworth, W.J.; Famiglietti, J.S.; Gupta, H.V.; Syed, K.H.; Goodrich, D.C. Integration of soil moisture remote sensing and hydrologic modeling using data assimilation. Water Resour. Res. 1998, 34, 3405–3420. [Google Scholar] [CrossRef]
- Shi, J.; Dong, X.; Zhao, T.; Du, J.; Jiang, L.; Du, Y.; Liu, H.; Wang, Z.; Ji, D.; Xiong, C. WCOM: The science scenario and objectives of a global water cycle observation mission. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014.
- Dong, X.; Liu, H.; Wang, Z.; Shi, J.; Zhao, T. WCOM: The mission concept and payloads of a global water cycle observation mission. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014.
- Schmugge, T.; Wilheit, T.; Webster, W., Jr.; Gloerson, P. Remote sensing of soil moisture with microwave radiometers. J. Geophys. Res. 1974, 79, 317–323. [Google Scholar] [CrossRef]
- Walker, J.P.; Houser, P.R. Requirements of a global near-surface soil moisture satellite mission: Accuracy, repeat time, and spatial resolution. Adv. Water Resour. 2004, 27, 785–801. [Google Scholar] [CrossRef]
- Gloersen, P.; Hardis, L. The scanning multichannel microwave radiometer (SMMR) experiment. In Its the Nimbus 7 User’s Guide; SEE N79-20148 11-12; NASA/Goddard Space Flight Center: Greenbelt, MD, USA, 1978. [Google Scholar]
- Ashcroft, P.; Wentz, F. Algorithm Theoretical Basis Document: AMSR Level 2A Algorithm; Robotics: Science & Systems: Santa Rosa, CA, USA, 2000. [Google Scholar]
- Njoku, E.G.; Jackson, T.J.; Lakshmi, V.; Chan, T.K.; Nghiem, S.V. Soil moisture retrieval from AMSR-E. IEEE Trans. Geosci. Remote Sens. 2003, 41, 215–229. [Google Scholar] [CrossRef]
- Le Vine, D.M.; Lagerloef, G.S.; Colomb, F.R.; Yueh, S.H.; Pellerano, F.A. Aquarius: An instrument to monitor sea surface salinity from space. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2040–2050. [Google Scholar] [CrossRef]
- Bindlish, R.; Jackson, T.; Cosh, M.; Zhao, T.; O'Neill, P. Global soil moisture from the Aquarius/SAC-D satellite: Description and initial assessment. IEEE Geosci. Remote Sens. Lett. 2015, 12, 923–927. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Dorigo, W.A.; Parinussa, R.M.; de Jeu, R.A.; Wagner, W.; McCabe, M.F.; Evans, J.P.; Van Dijk, A.I.J.M. Trend-preserving blending of passive and active microwave soil moisture retrievals. Remote Sens. Environ. 2012, 123, 280–297. [Google Scholar] [CrossRef]
- Baghdadi, N.; Gaultier, S.; King, C. Retrieving surface roughness and soil moisture from synthetic aperture radar (SAR) data using neural networks. Can. J. Remote Sens. 2002, 28, 701–711. [Google Scholar] [CrossRef]
- Jiang, H.; Cotton, W.R. Soil moisture estimation using an artificial neural network: A feasibility study. Can. J. Remote Sens. 2004, 30, 827–839. [Google Scholar] [CrossRef]
- Paloscia, S.; Pampaloni, P.; Pettinato, S.; Santi, E. A comparison of algorithms for retrieving soil moisture from ENVISAT/ASAR images. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3274–3284. [Google Scholar] [CrossRef]
- Pierdicca, N.; Castracane, P.; Pulvirenti, L. Inversion of electromagnetic models for bare soil parameter estimation from multifrequency polarimetric SAR data. Sensors 2008, 8, 8181–8200. [Google Scholar] [CrossRef] [PubMed]
- Paloscia, S.; Pettinato, S.; Santi, E.; Notarnicola, C.; Pasolli, L.; Reppucci, A. Soil moisture mapping using Sentinel-1 images: Algorithm and preliminary validation. Remote Sens. Environ. 2013, 134, 234–248. [Google Scholar] [CrossRef]
- Gruber, A.; Paloscia, S.; Santi, E.; Notarnicola, C.; Pasolli, L.; Smolander, T.; Pulliainen, J.; Mittelbach, H.; Dorigo, W.; Wagner, W. Performance inter-comparison of soil moisture retrieval models for the MetOp-A ASCAT instrument. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 2455–2458.
- Paloscia, S.; Pettinato, S.; Santi, E.; Huttunen, M.; Silander, J.; Vehvilainen, B. Soil moisture maps from ENVISAT/ASAR images in a Finland area obtained by using an algorithm based on Neural Networks. In Proceedings of the Geophysical Research Abstracts, Vienna, Austria, 2–7 April 2006.
- Liu, S.F.; Liou, Y.A.; Wang, W.J.; Wigneron, J.P.; Lee, J.B. Retrieval of crop biomass and soil moisture from measured 1.4 and 10.65 GHz brightness temperatures. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1260–1268. [Google Scholar]
- Del Frate, F.; Ferrazzoli, P.; Schiavon, G. Retrieving soil moisture and agricultural variables by microwave radiometry using neural networks. Remote Sens. Environ. 2003, 84, 174–183. [Google Scholar] [CrossRef]
- Chai, S.S.; Walker, J.P.; Makarynskyy, O.; Kuhn, M.; Veenendaal, B.; West, G. Use of soil moisture variability in artificial neural network retrieval of soil moisture. Remote Sens. 2009, 2, 166–190. [Google Scholar] [CrossRef]
- Liou, Y.A.; Liu, S.F.; Wang, W.J. Retrieving soil moisture from simulated brightness temperatures by a neural network. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1662–1672. [Google Scholar]
- Santi, E.; Pettinato, S.; Paloscia, S.; Pampaloni, P.; Macelloni, G.; Brogioni, M. An algorithm for generating soil moisture and snow depth maps from microwave spaceborne radiometers: HydroAlgo. Hydrol. Earth Syst. Sci. 2012, 16, 3659–3676. [Google Scholar] [CrossRef]
- Notarnicola, C.; Angiulli, M.; Posa, F. Soil moisture retrieval from remotely sensed data: Neural network approach versus Bayesian method. IEEE Trans. Geosci. Remote Sens. 2008, 46, 547–557. [Google Scholar] [CrossRef]
- Santi, E.; Paloscia, S.; Pettinato, S.; Fontanelli, G. A prototype ann based algorithm for the soil moisture retrieval from l-band in view of the incoming SMAP mission. In Proceedings of the 13th Specialist Meeting on Microwave Radiometry and Remote Sensing of the Environment (MicroRad), Pasadena, CA, USA, 24–27 March 2014.
- Elshorbagy, A.; Parasuraman, K. On the relevance of using artificial neural networks for estimating soil moisture content. J. Hydrol. 2008, 362, 1–18. [Google Scholar] [CrossRef]
- Aires, F.; Prigent, C.; Rossow, W.B. Sensitivity of satellite microwave and infrared observations to soil moisture at a global scale: 2. Global statistical relationships. J. Geophys. Res. Atmos. 2005, 110, D1103. [Google Scholar] [CrossRef]
- Jiménez, C.; Clark, D.B.; Kolassa, J.; Aires, F.; Prigent, C. A joint analysis of modeled soil moisture fields and satellite observations. J. Geophys. Res. Atmos. 2013, 118, 6771–6782. [Google Scholar] [CrossRef]
- Lu, Z.; Chai, L.; Ye, Q.; Zhang, T. Reconstruction of time-series soil moisture from AMSR2 and SMOS data by using recurrent nonlinear autoregressive neural networks. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 980–983.
- De Jeu, R.A.M.; Wigneron, J.P.; Kerr, Y.; Drusch, M.; van der Schalie, R.; Al Yaari, A.; Rodriguez, N. A study towards the integration of SMOS soil moisture in a consistent climate record. In Proceedings of the Satellite Soil Moisture Validation & Application Workshop, Amsterdam, The Netherlands, 10–11 July 2014.
- De Jeu, R.A.M.; Kerr, Y.; Wigneron, J.P.; Rodriguez-Fernandez, N.; Al-Yaari, A.; van der Schalie, R.; Dolman, H.; Drusch, M.; Mecklenburg, S. The integration of SMOS soil moisture in a consistent soil moisture climate record. In Proceedings of the European Geosciences Union General Assembly Conference Abstracts, Vienna, Austria, 12–17 April 2015.
- Al-Yaari, A.; Wigneron, J.P.; Kerr, Y.; De Jeu, R.; Rodriguez-Fernandez, N.; Van Der Schalie, R.; Al Bitar, A.; Mialon, A.; Richaume, P.; Dolman, A.; et al. Testing regression equations to derive long-term global soil moisture datasets from passive microwave observations. Remote Sens. Environ. 2016, 180, 453–464. [Google Scholar] [CrossRef]
- Rodriguez-Fernandez, N.; Richaume, P.; Aires, F.; Prigent, C.; Kerr, Y.; Kolassa, J.; Jimenez, C.; Cabot, F.; Mahmoodi, A. Soil moisture retrieval from SMOS observations using neural networks. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 2431–2434.
- Rodriguez-Fernandez, N.J.; Aires, F.; Richaume, P.; Kerr, Y.H.; Prigent, C.; Kolassa, J.; Cabot, F.; Jiménez, C.; Mahmoodi, A.; Drusch, M. Soil moisture retrieval using neural networks: Application to SMOS. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5991–6007. [Google Scholar] [CrossRef]
- Rodriguez-Fernandez, N.J.; Kerr, Y.H.; De Jeu, R.A.M.; van der Schalie, R.; Wigneron, J.P.; Ayaari, A.A.; Dolman, H.; Drusch, M.; Mecklenburg, S. Long time series of soil moisture obtained using neural networks: Application to AMSR-E and SMOS. In Proceedings of the European Geosciences EGU General Assembly Conference Abstracts, Vienna, Austria, 12–17 April 2015.
- Rodriguez-Fernandez, N.; Kerr, Y.; Van Der Schalie, R.; De Jeu, R.; Wigneron, J.P.; Al Yaari, A.; Richaume, P.; Drusch, M.; Mecklenburg, S. Long time series of soil moisture retrieved from AMSR-E and SMOS observations. In Proceedings of the ESA-ESRIN Earth Observation for Water Cycle Science, Frascati, Italy, 20–23 October 2015.
- Van der Schalie, R.; de Jeu, R.; Kerr, Y.; Wigneron, J.P.; Rodriguez-fernandez, N.; Al Yaari, A.; Drusch, M.; Mecklenburg, S.; Dolman, H. A radiative transfer based approach to merge SMOS and AMSR-e soil moisture retrievals into one consistent record. In Proceedings of the ESA-ESRIN Earth Observation for Water Cycle Science, Frascati, Italy, 20–23 October 2015.
- Jackson, T.J.; Bindlish, R.; Cosh, M.H.; Zhao, T.; Starks, P.J.; Bosch, D.D.; Seyfried, M.; Moran, M.S.; Goodrich, D.C.; Kerr, Y.H.; et al. Validation of soil moisture and ocean salinity (SMOS) soil moisture over watershed networks in the US. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1530–1543. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Schwank, M.; Baeza, E.L.; Kerr, Y.; Novello, N.; Millan, C.; Moisy, C.; Richaume, P.; Mialon, A.; Al Bitar, A.; et al. First evaluation of the simultaneous SMOS and ELBARA-II observations in the Mediterranean region. Remote Sens. Environ. 2012, 124, 26–37. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.P.; Ducharne, A.; Kerr, Y.; De Rosnay, P.; De Jeu, R.; Govind, A.; Al Bitar, A.; Albergel, C.; Munoz-Sabater, J.; et al. Global-scale evaluation of two satellite-based passive microwave soil moisture datasets (SMOS and AMSR-E) with respect to land data assimilation system estimates. Remote Sens. Environ. 2014, 149, 181–195. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.P.; Ducharne, A.; Kerr, Y.H.; Wagner, W.; De Lannoy, G.; Reichle, R.; Al Bitar, A.; Dorigo, W.; Richaume, P.; et al. Global-scale comparison of passive (SMOS) and active (ASCAT) satellite based microwave soil moisture retrievals with soil moisture simulations (MERRA-Land). Remote Sens. Environ. 2014, 152, 614–626. [Google Scholar] [CrossRef]
- Al Bitar, A.; Leroux, D.; Kerr, Y.H.; Merlin, O.; Richaume, P.; Sahoo, A.; Wood, E.F. Evaluation of SMOS soil moisture products over continental US using the SCAN/SNOTEL network. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1572–1586. [Google Scholar] [CrossRef]
- Sánchez, N.; Martínez-Fernández, J.; Scaini, A.; Perez-Gutierrez, C. Validation of the SMOS L2 soil moisture data in the REMEDHUS network (Spain). IEEE Trans. Geosci. Remote Sens. 2012, 50, 1602–1611. [Google Scholar] [CrossRef]
- Albergel, C.; De Rosnay, P.; Gruhier, C.; Muñoz-Sabater, J.; Hasenauer, S.; Isaksen, L.; Kerr, Y.; Wagner, W. Evaluation of remotely sensed and modelled soil moisture products using global ground-based in situ observations. Remote Sens. Environ. 2012, 118, 215–226. [Google Scholar] [CrossRef]
- Leroux, D.J.; Kerr, Y.H.; Al Bitar, A.; Bindlish, R.; Jackson, T.J.; Berthelot, B.; Portet, G. Comparison between SMOS, VUA, ASCAT, and ECMWF soil moisture products over four watersheds in US. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1562–1571. [Google Scholar] [CrossRef]
- Collow, T.W.; Robock, A.; Basara, J.B.; Illston, B.G. Evaluation of SMOS retrievals of soil moisture over the central United States with currently available in situ observations. J. Geophys. Res. Atmos. 2012, 117. [Google Scholar] [CrossRef]
- Kolassa, J.; Aires, F.; Polcher, J.; Prigent, C.; Jimenez, C.; Pereira, J.M. Soil moisture retrieval from multi-instrument observations: Information content analysis and retrieval methodology. J. Geophys. Res. Atmos. 2013, 118, 4847–4859. [Google Scholar] [CrossRef]
- Magagi, R.; Berg, A.A.; Goïta, K.; Belair, S.; Jackson, T.J.; Toth, B.; Walker, A.; McNairn, H.; O’Neill, P.E.; Moghaddam, M.; et al. Canadian experiment for soil moisture in 2010 (CanEx-SM10): Overview and preliminary results. IEEE Trans. Geosci. Remote Sens. 2013, 51, 347–363. [Google Scholar] [CrossRef]
- Dall’Amico, J.T.; Schlenz, F.; Loew, A.; Dall’Amico, J.T.; Schlenz, F.; Loew, A.; Mauser, W. First results of SMOS soil moisture validation in the upper Danube catchment. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1507–1516. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Richaume, P.; Wigneron, J.P.; Ferrazzoli, P.; Mahmoodi, A.; Al Bitar, A.; Cabot, F.; Gruhier, C.; Juglea, S.E.; et al. The SMOS soil moisture retrieval algorithm. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1384–1403. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Njoku, E.G. A semiempirical model for interpreting microwave emission from semiarid land surfaces as seen from space. IEEE Trans. Geosci. Remote Sens. 1990, 28, 384–393. [Google Scholar] [CrossRef]
- Knowles, K.; Savoie, M.; Armstrong, R.; Brodzik, M.J. AMSR-E/Aqua Daily EASE-Grid Brightness Temperatures, Version 1. Available online: http://dx.doi.org/10.5067/XIMNXRTQVMOX (accessed on 2 January 2017).
- Knowles, K.W.; Savoie, M.H.; Armstrong, R.L.; Brodzik, M.J. AMSR-E/Aqua Daily Global Quarter-Degree Gridded Brightness Temperatures; National Snow and Ice Data Center: Boulder, CO, USA, 2011. [Google Scholar]
- Standard Products of AMSR-E. Available online: ftp://n5eil01u.ecs.nsidc.org/ (accessed on 29 December 2016).
- LPRM Algorithm Products of AMSR-E. Available online: ftp://hydro1.sci.gsfc.nasa.gov/data/s4pa/WAOB/LPRM_AMSRE_D_SOILM3.002 (accessed on 29 December 2016).
- Standard Products of AMSR2. Available online: https://gcom-w1.jaxa.jp/ (accessed on 29 December 2016).
- LPRM Algorithm Products of AMSR. Available online: ftp://hydro1.sci.gsfc.nasa.gov/data/s4pa/WAOB/LPRM_AMSR2_D_SOILM3.001/ (accessed on 29 December 2016).
- Dorigo, W.A.; Wagner, W.; Hohensinn, R.; Hahn, S.; Paulik, C.; Xaver, A.; Gruber, A.; Drusch, M.; Mecklenburg, S.; Oevelen, P.V.; et al. The international soil moisture network: A data hosting facility for global in situ soil moisture measurements. Hydrol. Earth Syst. Sci. 2011, 15, 1675–1698. [Google Scholar] [CrossRef]
- Dorigo, W.A.; Xaver, A.; Vreugdenhil, M.; Gruber, A.; Hegyiová, A.; Sanchis-Dufau, A.D.; Zamojski, D.; Cordes, C.; Wagner, W.; Drusch, M. Global automated quality control of in situ soil moisture data from the International Soil Moisture Network. Vadose Zone J. 2013, 12. [Google Scholar] [CrossRef]
- Holmes, T.R.H.; De Jeu, R.A.M.; Owe, M.; Dolman, A.J. Land surface temperature from Ka band (37 GHz) passive microwave observations. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Shi, J.; Jackson, T.; Tao, J.; Du, J.; Bindlish, R.; Lu, L.; Chen, K.S. Microwave vegetation indices for short vegetation covers from satellite passive microwave sensor AMSR-E. Remote Sens. Environ. 2008, 112, 4285–4300. [Google Scholar] [CrossRef]
- Zhao, T.J.; Zhang, L.X.; Shi, J.C.; Jiang, L.M. A physically based statistical methodology for surface soil moisture retrieval in the Tibet Plateau using microwave vegetation indices. J. Geophys. Res. Atmos. 2011, 116. [Google Scholar] [CrossRef]
- Cui, Q.; Shi, J.; Du, J.; Zhao, T.; Xiong, C. An approach for monitoring global vegetation based on multiangular observations from SMOS. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 604–616. [Google Scholar] [CrossRef]
- Becker, F.; Choudhury, B.J. Relative sensitivity of normalized difference vegetation index (NDVI) and microwave polarization difference index (MPDI) for vegetation and desertification monitoring. Remote Sens. Environ. 1988, 24, 297–311. [Google Scholar] [CrossRef]
- Owe, M.; De Jeu, R.; Walker, J. A methodology for surface soil moisture and vegetation optical depth retrieval using the microwave polarization difference index. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1643–1654. [Google Scholar] [CrossRef]
- De Jeu, R.A.M.; Owe, M. Further validation of a new methodology for surface moisture and vegetation optical depth retrieval. Int. J. Remote Sens. 2003, 24, 4559–4578. [Google Scholar] [CrossRef]
- Min, Q.; Lin, B. Remote sensing of evapotranspiration and carbon uptake at Harvard Forest. Remote Sens. Environ. 2006, 100, 379–387. [Google Scholar] [CrossRef]
- Taylor, K.E. Summarizing multiple aspects of model performance in a single diagram. J. Geophys. Res. Atmos. 2001, 106, 7183–7192. [Google Scholar] [CrossRef]
- Taylor, K.E. Taylor Diagram Primer. Available online: http://www.atmos.albany.edu/daes/atmclasses/atm401/spring_2016/ppts_pdfs/Taylor_diagram_primer.pdf (accessed on 2 January 2017).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Num | Site ID | Site Name | Group |
|---|---|---|---|
| 1 | SCAN2076 | AllenFarms | sites with strong interannual variations |
| 2 | SCAN2089 | ReynoldsHomestead | |
| 3 | SCAN2024 | GoodwinCreekPasture | |
| 4 | SCAN2075 | McalisterFarm | |
| 5 | SCAN2078 | BraggFarm | |
| 6 | SCAN2084 | UAPBMarianna | |
| 7 | SCAN2030 | UAPBLonokeFarm | |
| 8 | SCAN2059 | NewbyFarm | |
| 9 | SCAN2079 | MammothCave | |
| 10 | SCAN2001 | RogersFarm#1 | sites with weak interannual variations |
| 11 | SCAN2093 | Phillipsburg | |
| 12 | SCAN2002 | CrescentLake#1 | sites in semi-arid areas |
| 13 | SCAN2026 | WalnutGulch#1 | |
| 14 | SCAN2027 | LittleRiver | |
| 15 | SCAN2168 | JornadaExpRange |
| SiteID | CC | RMSE | Bias | p-Value < 0.05 |
|---|---|---|---|---|
| SCAN2076 | 0.73 | 0.073 | −0.0063 | yes |
| SCAN2089 | 0.49 | 0.114 | −0.0106 | yes |
| SCAN2024 | 0.75 | 0.066 | 0.0101 | yes |
| SCAN2075 | 0.73 | 0.054 | 0.0001 | yes |
| SCAN2078 | 0.65 | 0.053 | 0.0067 | yes |
| SCAN2084 | 0.87 | 0.053 | 0.0021 | yes |
| SCAN2030 | 0.84 | 0.064 | −0.0223 | yes |
| SCAN2059 | 0.71 | 0.050 | 0.0038 | yes |
| SCAN2079 | 0.65 | 0.161 | 0.0049 | yes |
| SCAN2001 | 0.66 | 0.056 | −0.0173 | yes |
| SCAN2093 | 0.78 | 0.037 | −0.0005 | yes |
| SCAN2002 | 0.86 | 0.040 | −0.0063 | yes |
| SCAN2026 | 0.82 | 0.034 | 0.0003 | yes |
| SCAN2027 | 0.72 | 0.057 | 0.0085 | yes |
| SCAN2168 | 0.95 | 0.018 | 0.0014 | yes |
| Mean-15sites | 0.75 | 0.062 | 0.004 | yes |
| Mean-allsites | 0.63 | 0.053 | −0.0017 | yes |
| Mean-global | 0.67 | 0.055 | −0.0005 | yes |
| SM | NNsm | AMSR_LPRM | ||||||
|---|---|---|---|---|---|---|---|---|
| SCANID | CC | RMSE | Bias | p < 0.05 | CC | RMSE | Bias | p < 0.05 |
| SCAN2076 | 0.71 | 0.080 | 0.007 | yes | 0.38 | 0.252 | 0.230 | yes |
| SCAN2089 | 0.23 | 0.088 | 0.017 | yes | 0.29 | 0.216 | −0.068 | yes |
| SCAN2024 | 0.50 | 0.084 | −0.075 | yes | 0.27 | 0.156 | 0.208 | yes |
| SCAN2075 | 0.56 | 0.076 | −0.063 | yes | 0.33 | 0.243 | 0.122 | yes |
| SCAN2078 | 0.46 | 0.060 | −0.079 | yes | 0.24 | 0.119 | −0.161 | yes |
| SCAN2084 | 0.65 | 0.070 | −0.060 | yes | 0.20 | 0.151 | −0.034 | yes |
| SCAN2030 | 0.69 | 0.083 | 0.063 | yes | 0.55 | 0.103 | 0.049 | yes |
| SCAN2059 | 0.70 | 0.086 | −0.029 | yes | 0.59 | 0.115 | −0.008 | yes |
| SCAN2079 | 0.46 | 0.173 | 0.004 | yes | 0.17 | 0.194 | 0.008 | yes |
| SCAN2001 | 0.56 | 0.078 | −0.051 | yes | 0.23 | 0.131 | −0.066 | yes |
| SCAN2093 | 0.47 | 0.068 | −0.033 | yes | 0.18 | 0.107 | 0.111 | yes |
| SCAN2002 | 0.21 | 0.091 | −0.024 | yes | 0.27 | 0.107 | 0.059 | yes |
| SCAN2026 | 0.52 | 0.077 | 0.053 | yes | 0.36 | 0.058 | −0.028 | yes |
| SCAN2027 | 0.56 | 0.056 | 0.185 | yes | 0.43 | 0.140 | 0.215 | yes |
| SCAN2168 | 0.48 | 0.062 | 0.061 | no | 0.57 | 0.061 | 0.104 | yes |
| Mean-15sites | 0.52 | 0.084 | 0.002 | yes | 0.34 | 0.144 | 0.123 | yes |
| Mean-allsites | 0.43 | 0.078 | −0.004 | yes | 0.34 | 0.127 | 0.0004 | yes |
| Mean-15sites (Anomaly) | 0.24 | 0.058 | −0.0004 | yes | 0.20 | 0.104 | 0.087 | yes |
| Mean-allsites (Anomaly) | 0.28 | 0.062 | 0.007 | yes | 0.30 | 0.075 | 0.010 | yes |
| Algorithm | CC | RMSE | Bias | Time Period | Input |
|---|---|---|---|---|---|
| Training | Retrieved SM vs. Reference SM | ||||
| NNsm | 0.67 | 0.055 | 0.0005 | 2010–2011, 2013 | AMSR-E/AMSR2 |
| Reg_sm | 0.60 | 0.057 | - | 2010–2011 | AMSR-E |
| Simulation | Retrieved SM vs. SCANsm | ||||
| NNsm | 0.52 | 0.084 | −0.002 | 2003–2015 | AMSR-E/AMSR2 |
| Reg_sm | 0.49 | 0.100 | −0.033 | 2003–2009 | AMSR-E |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, P.; Shi, J.; Zhao, T.; Lu, H.; Al-Yaari, A. Rebuilding Long Time Series Global Soil Moisture Products Using the Neural Network Adopting the Microwave Vegetation Index. Remote Sens. 2017, 9, 35. https://doi.org/10.3390/rs9010035
Yao P, Shi J, Zhao T, Lu H, Al-Yaari A. Rebuilding Long Time Series Global Soil Moisture Products Using the Neural Network Adopting the Microwave Vegetation Index. Remote Sensing. 2017; 9(1):35. https://doi.org/10.3390/rs9010035
Chicago/Turabian StyleYao, Panpan, Jiancheng Shi, Tianjie Zhao, Hui Lu, and Amen Al-Yaari. 2017. "Rebuilding Long Time Series Global Soil Moisture Products Using the Neural Network Adopting the Microwave Vegetation Index" Remote Sensing 9, no. 1: 35. https://doi.org/10.3390/rs9010035
APA StyleYao, P., Shi, J., Zhao, T., Lu, H., & Al-Yaari, A. (2017). Rebuilding Long Time Series Global Soil Moisture Products Using the Neural Network Adopting the Microwave Vegetation Index. Remote Sensing, 9(1), 35. https://doi.org/10.3390/rs9010035