
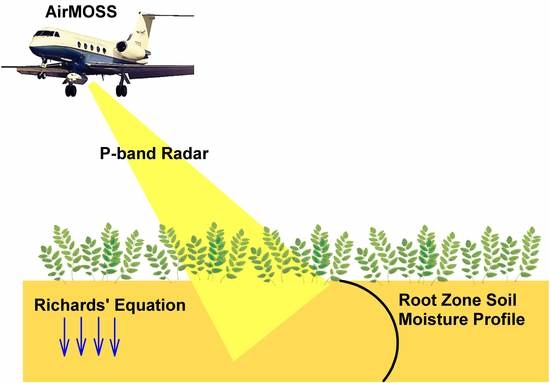
Advancing NASA’s AirMOSS P-Band Radar Root Zone Soil Moisture Retrieval Algorithm via Incorporation of Richards’ Equation

 ,
,
Abstract
:
1. Introduction
2. Mathematical Derivations
2.1. Richards’ Equation
2.2. New Solution to Richards’ Equation
2.3. Second Order Polynomial Approximation
3. Validation of the Proposed SMP Model
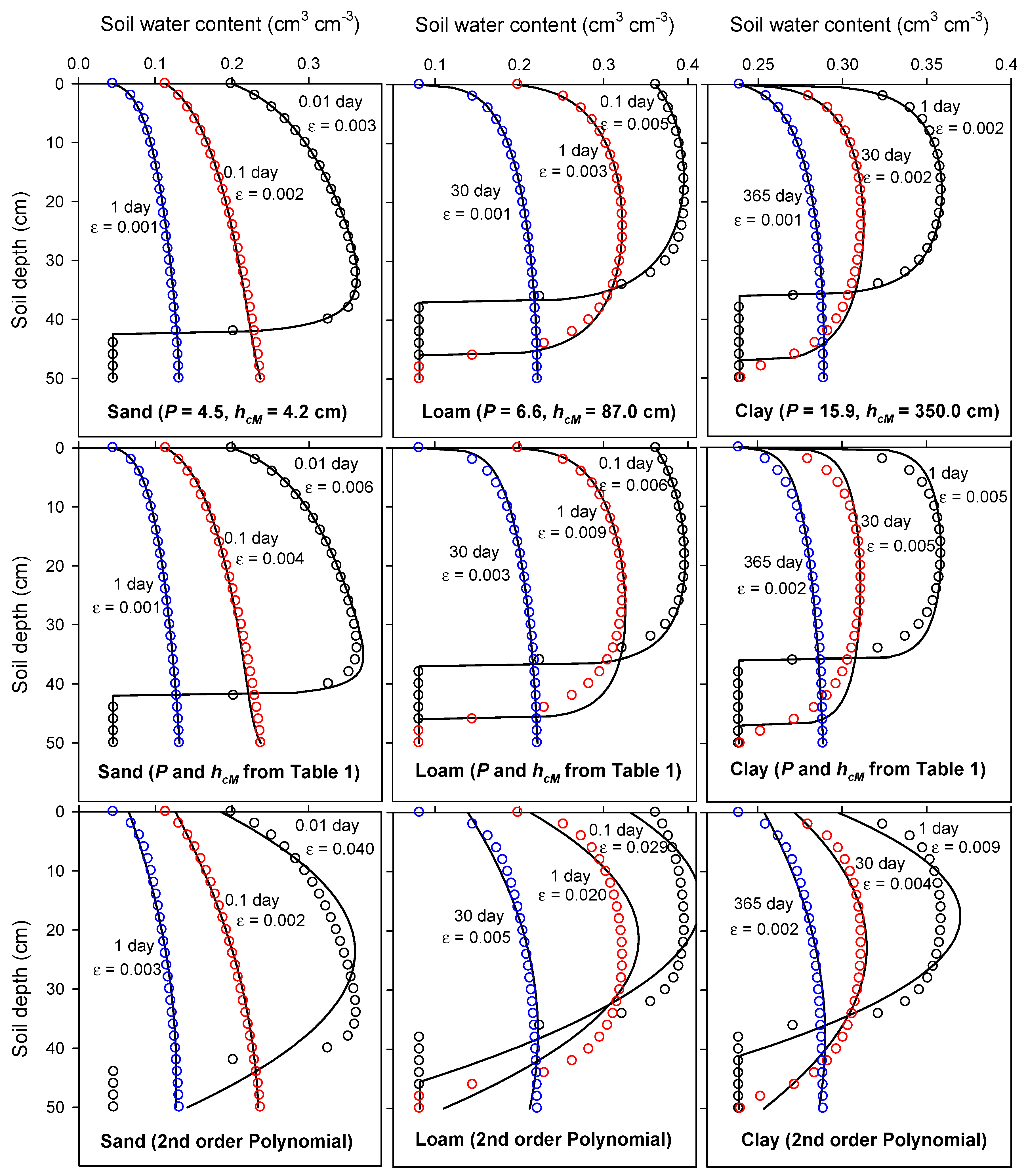
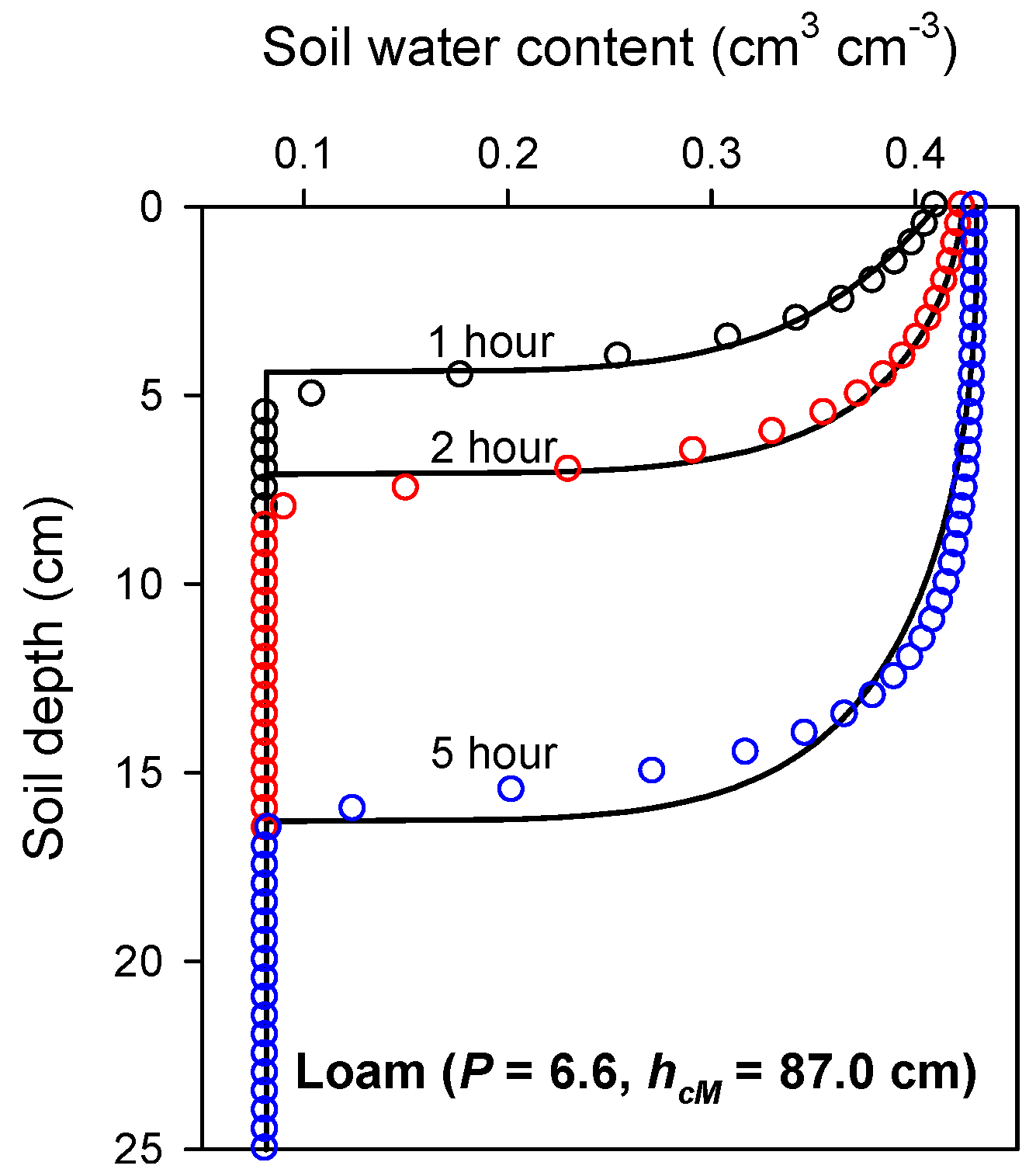
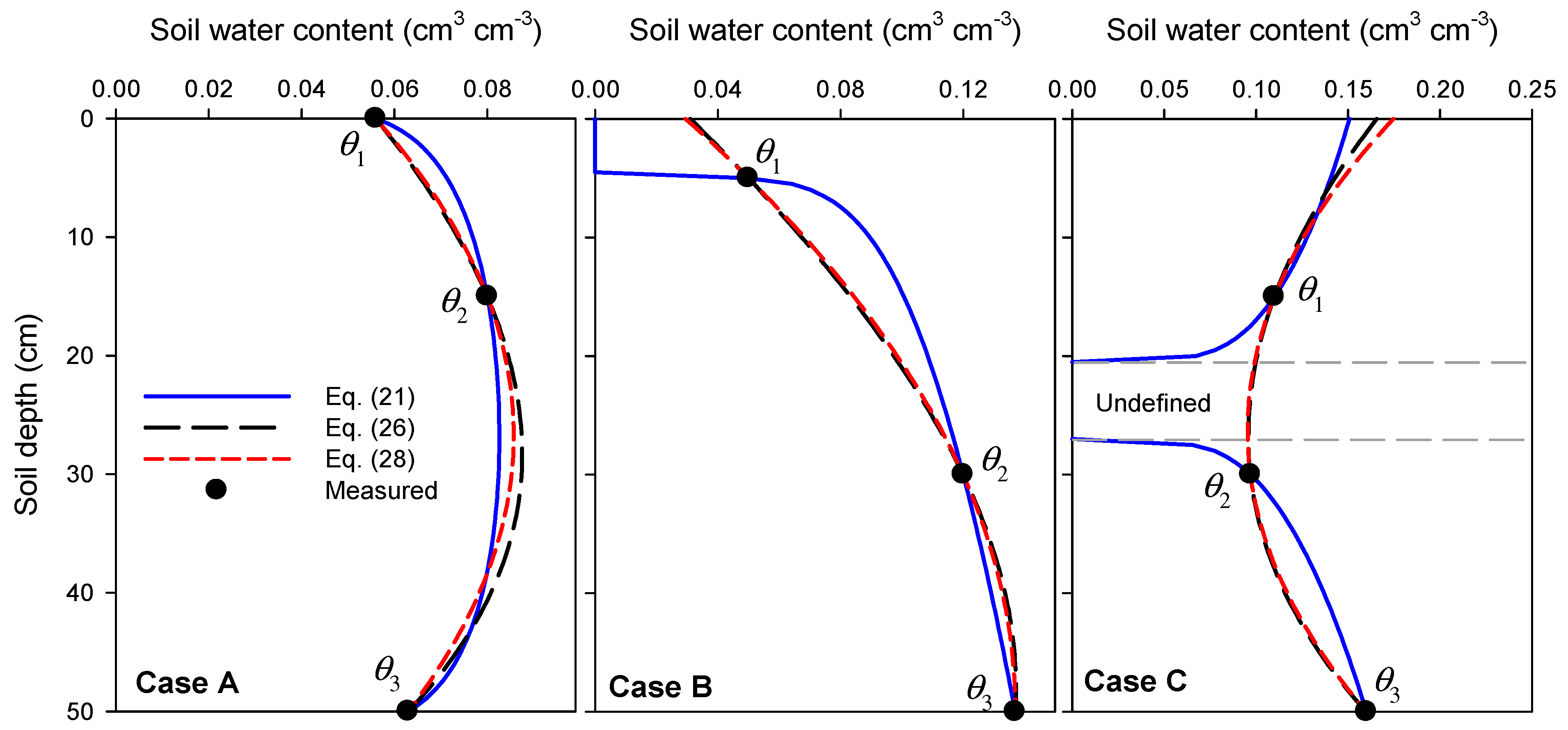
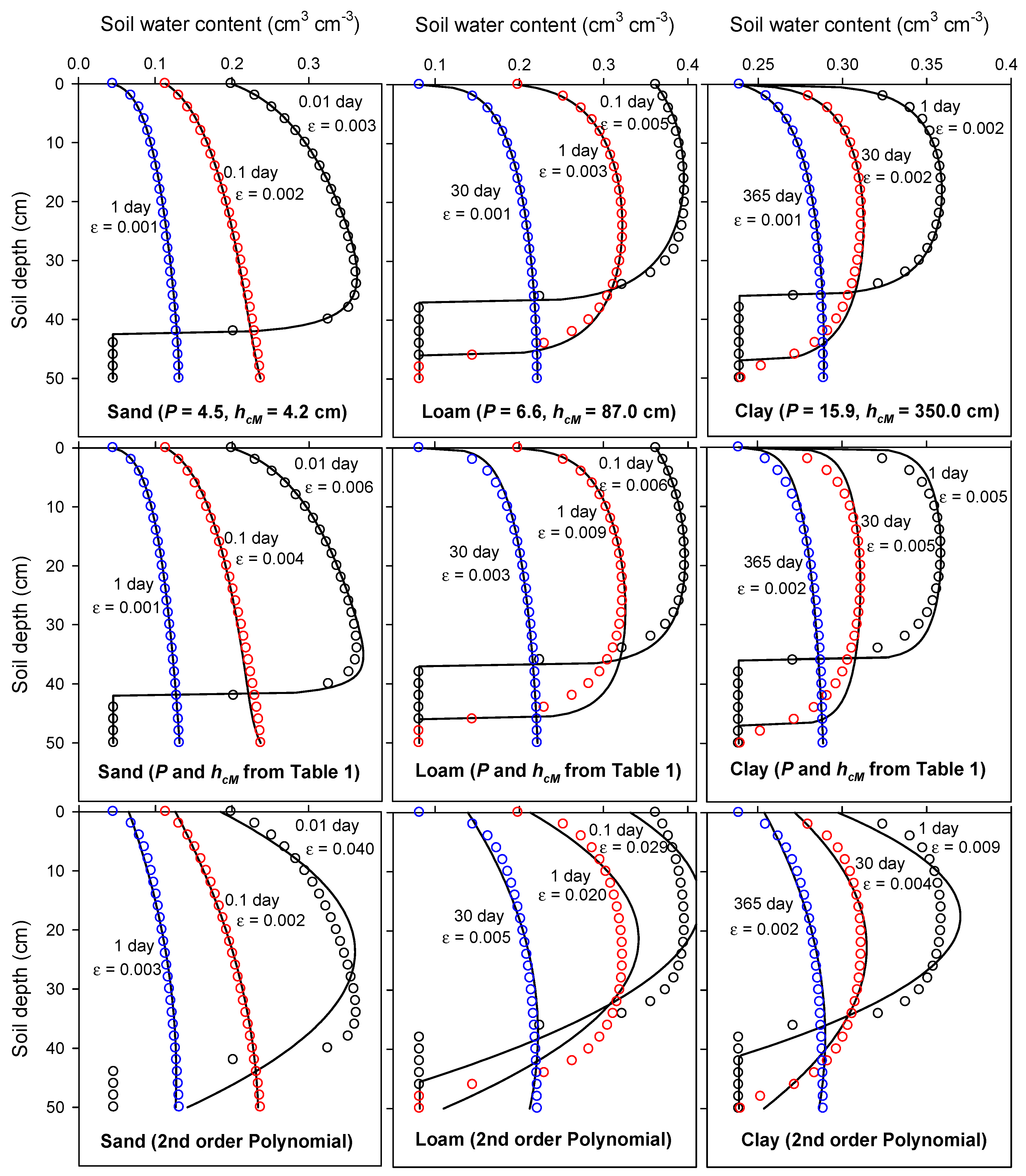
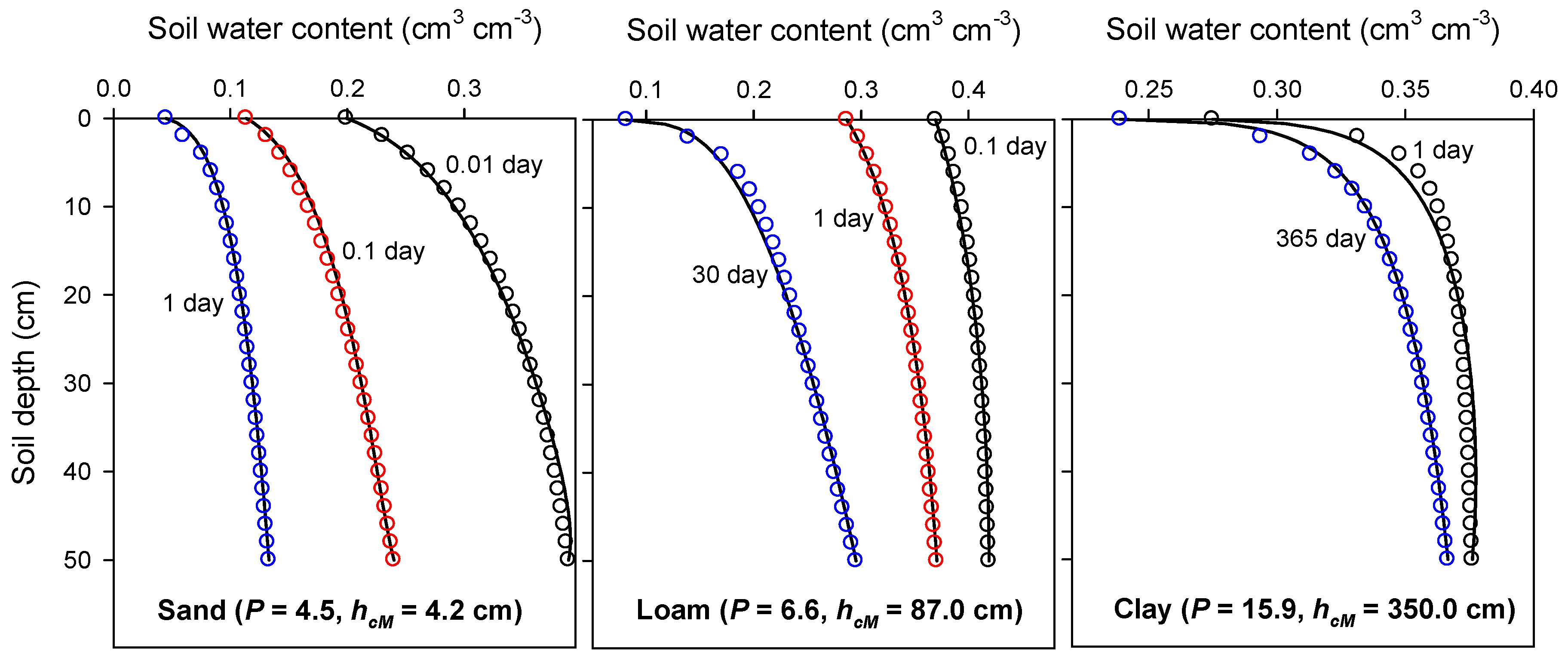
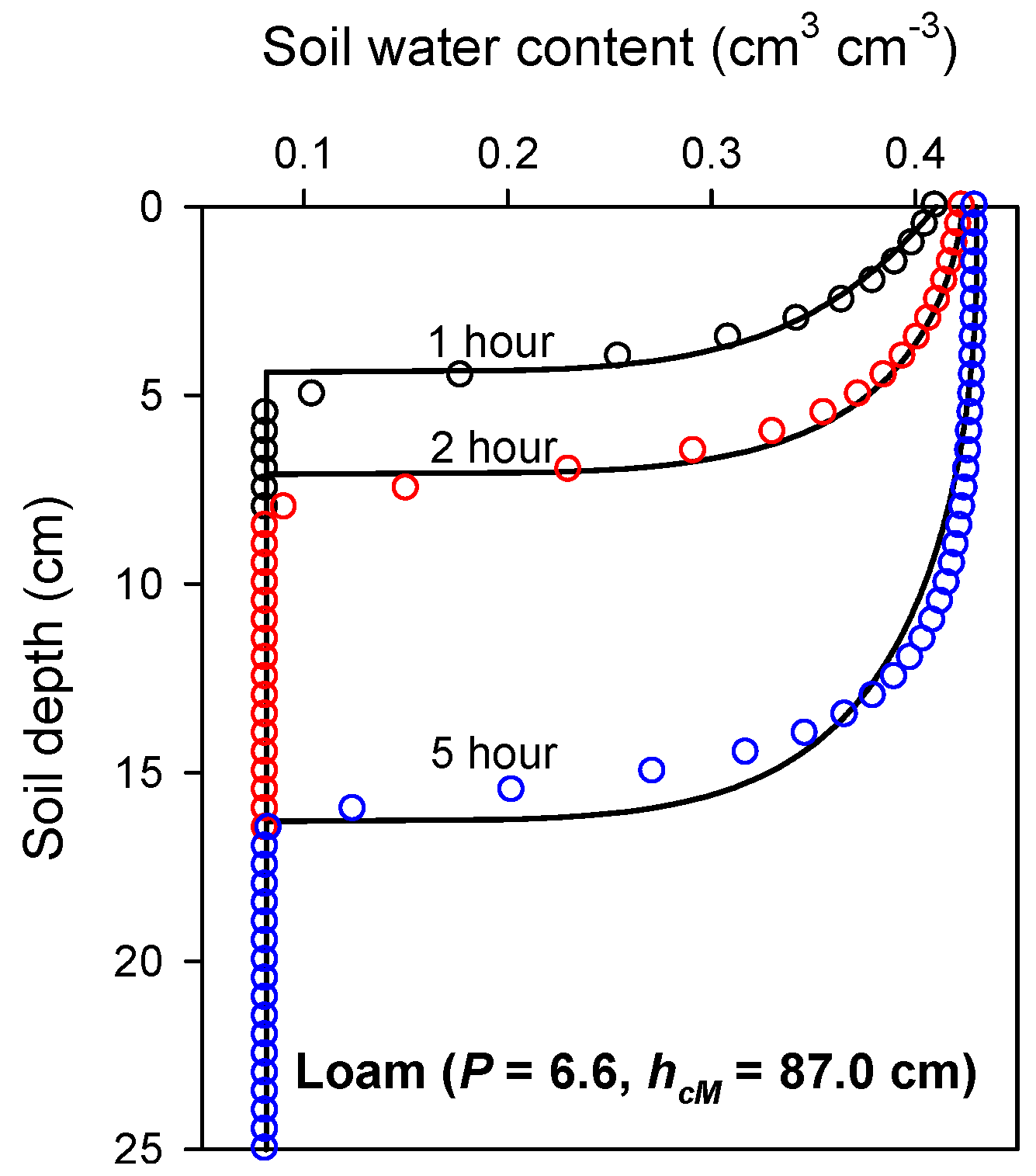
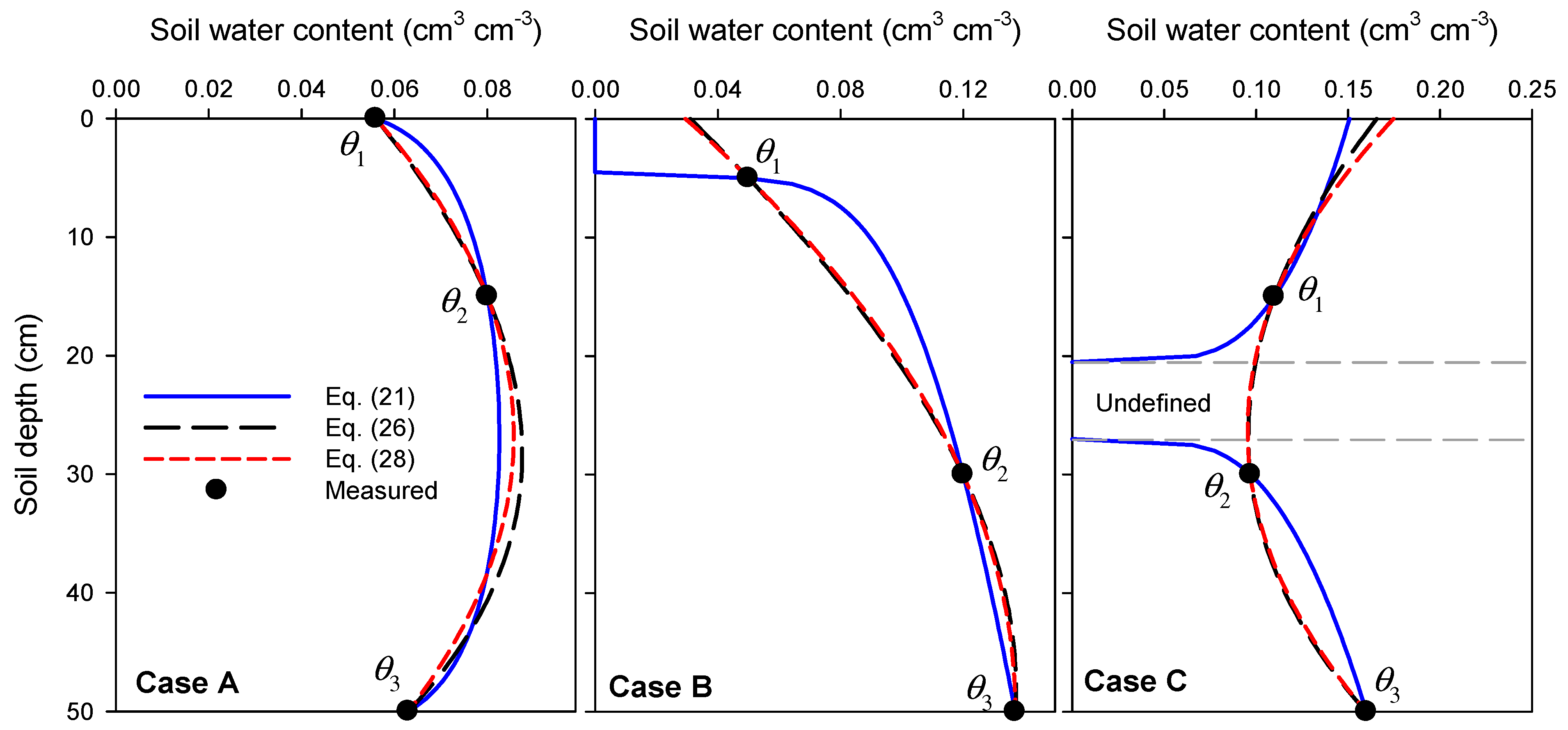
3.1. Numerical Data
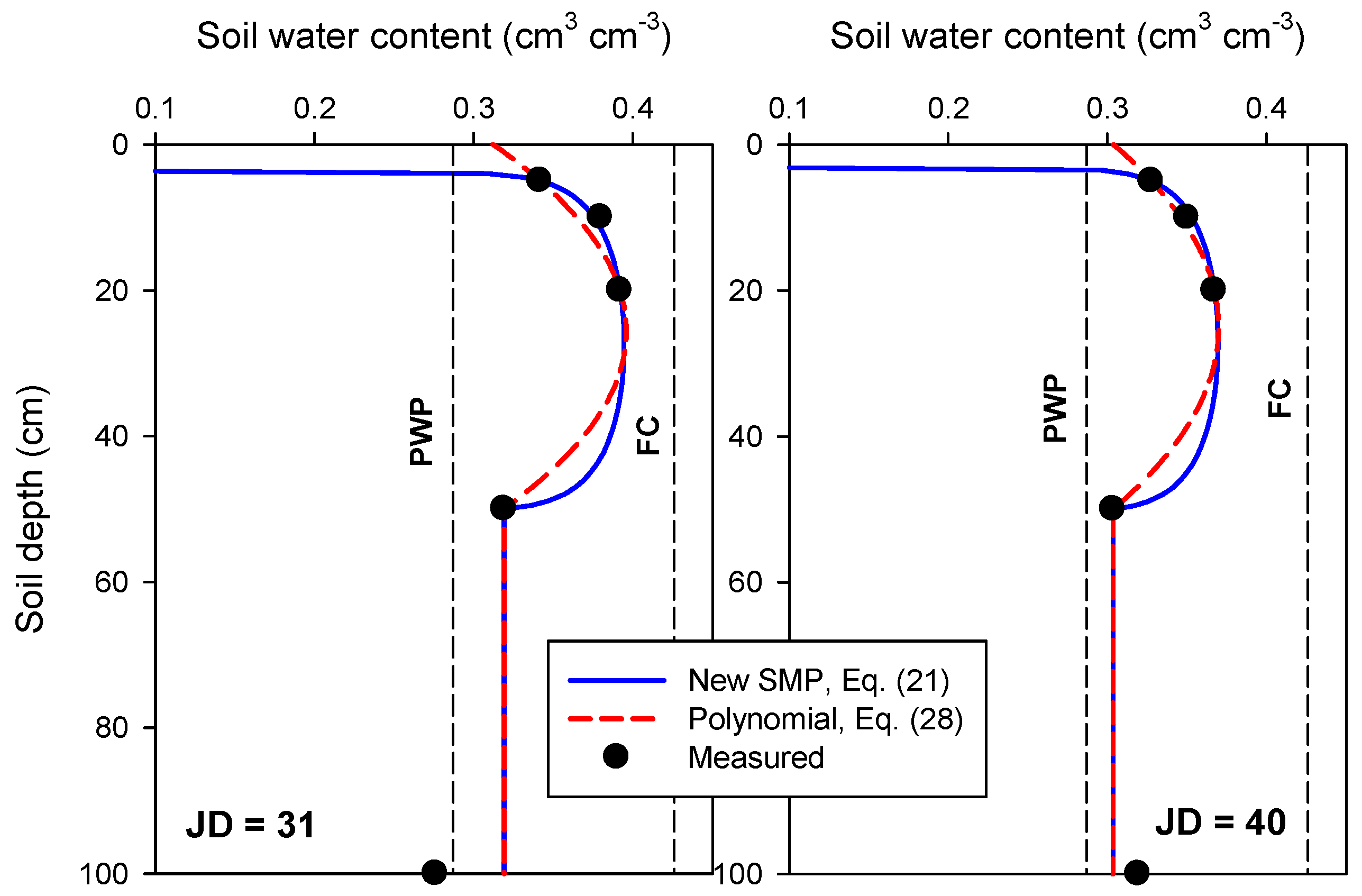
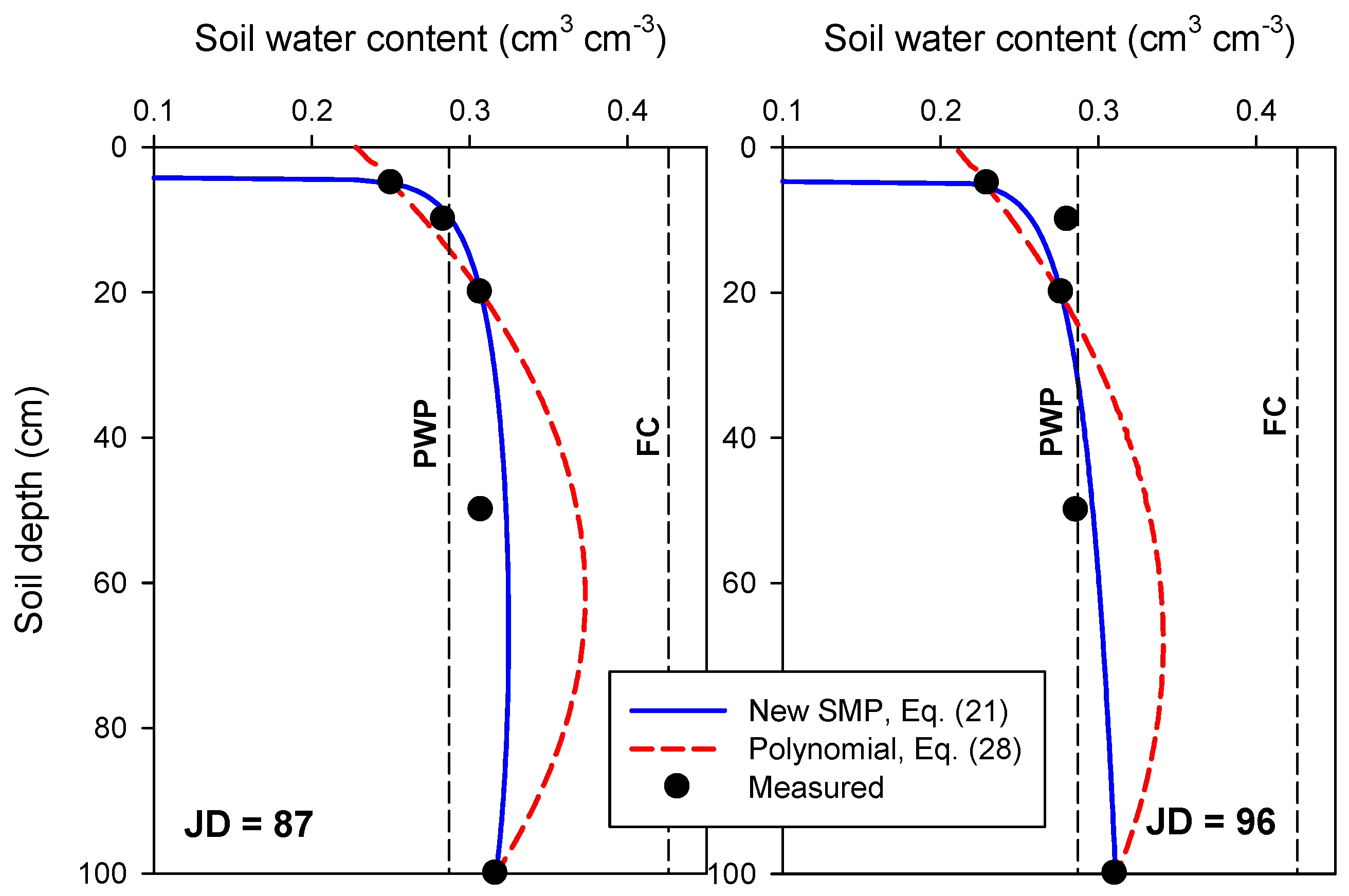
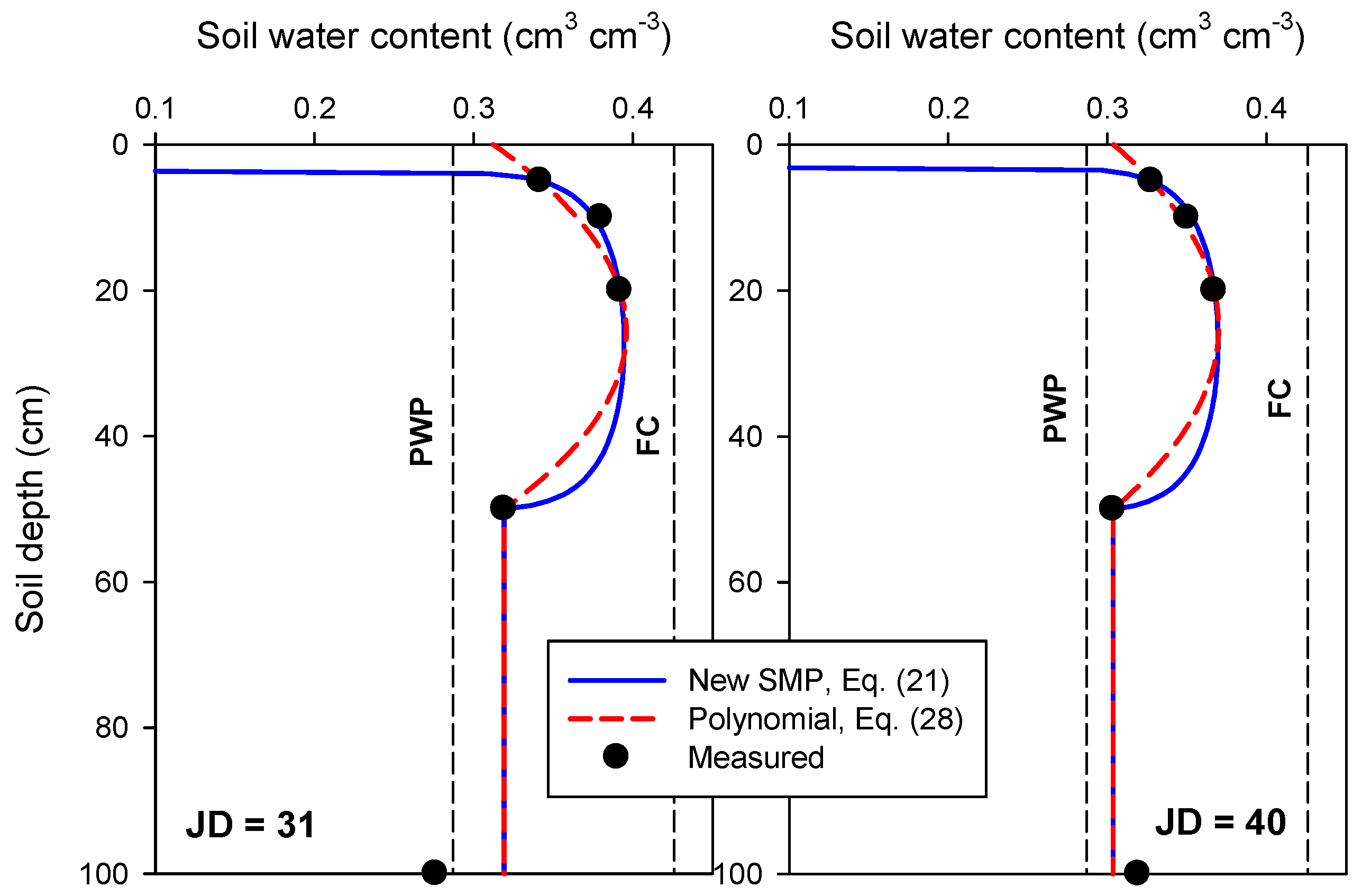
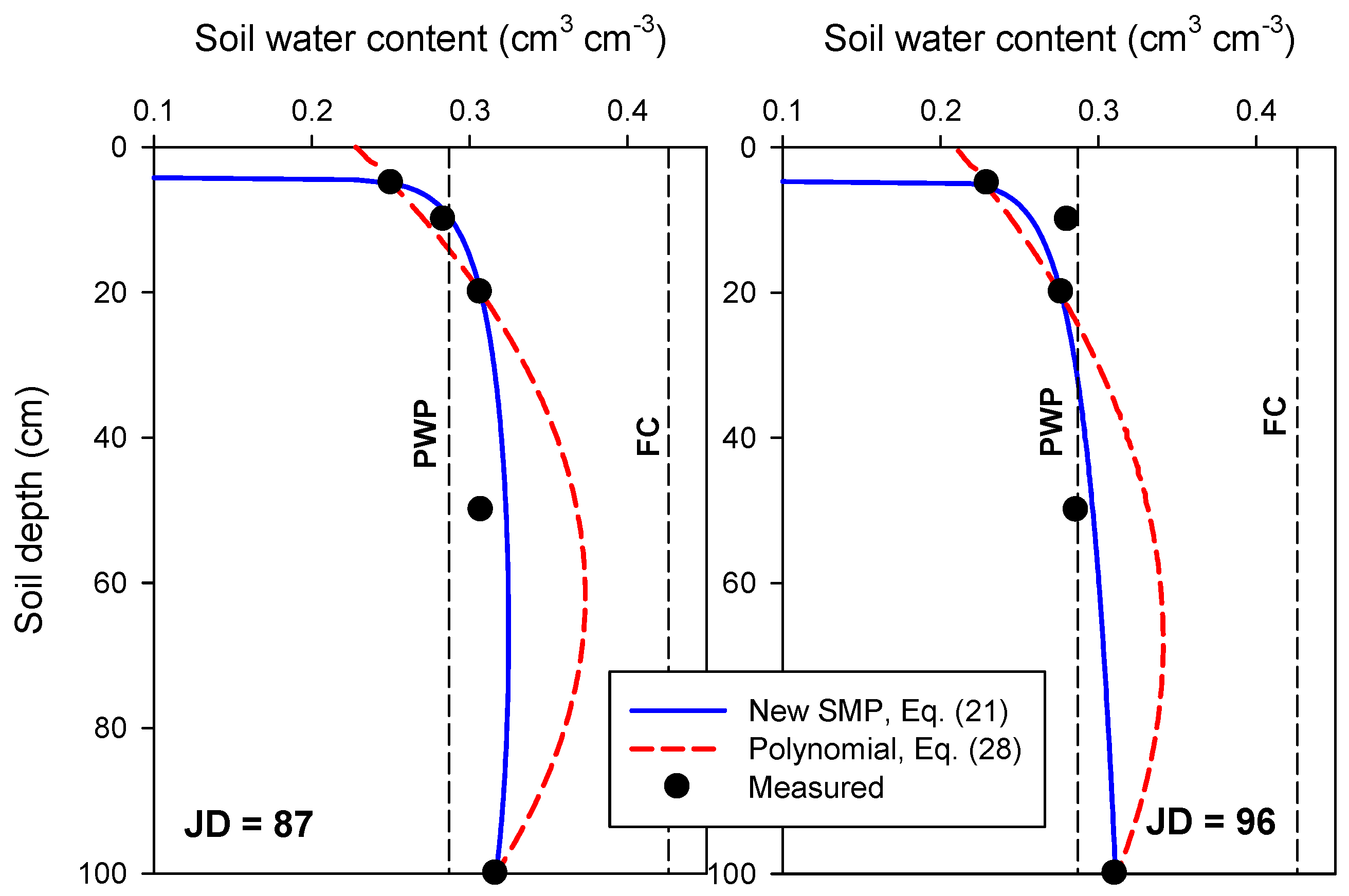
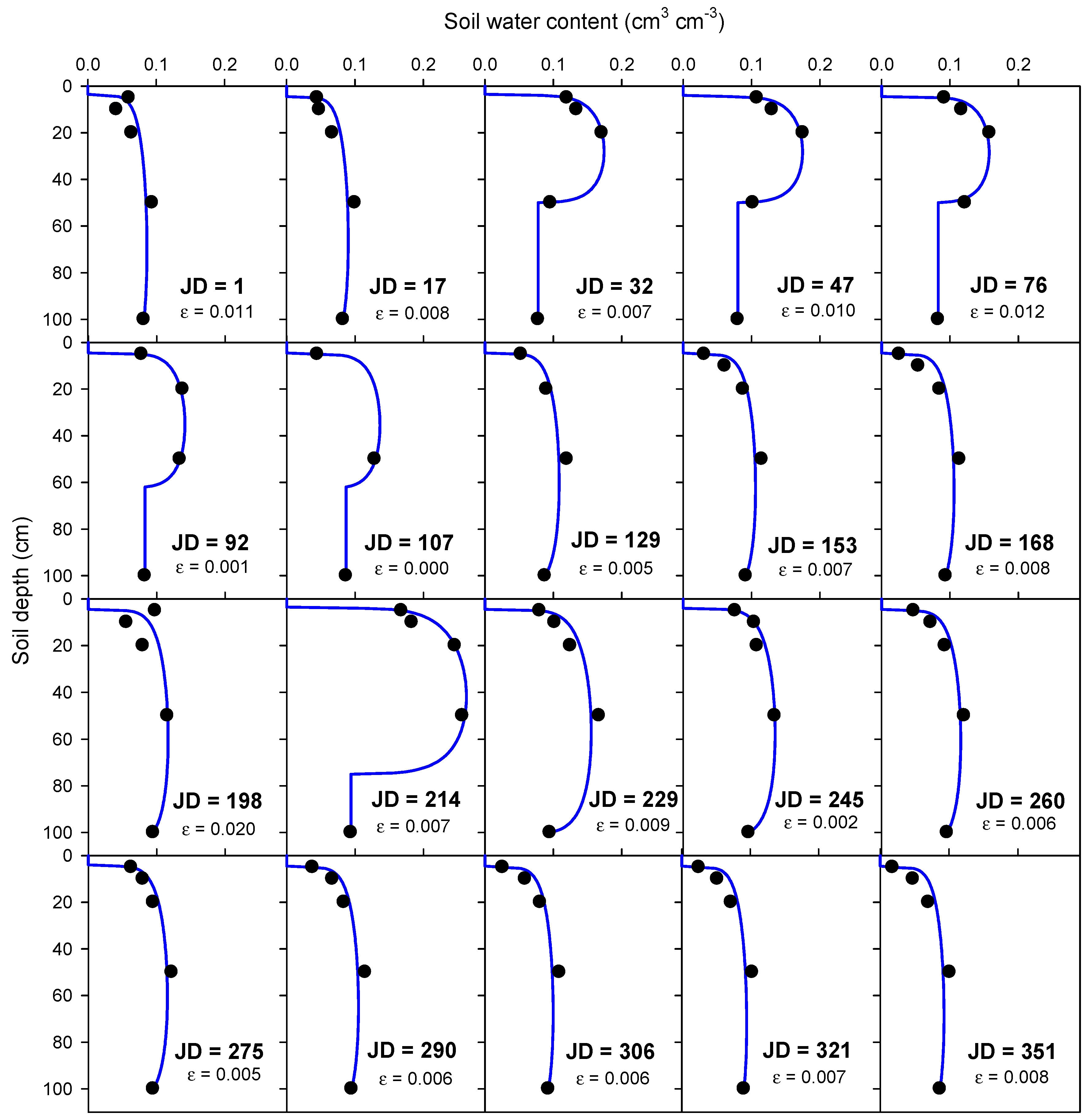
3.2. Measured Data
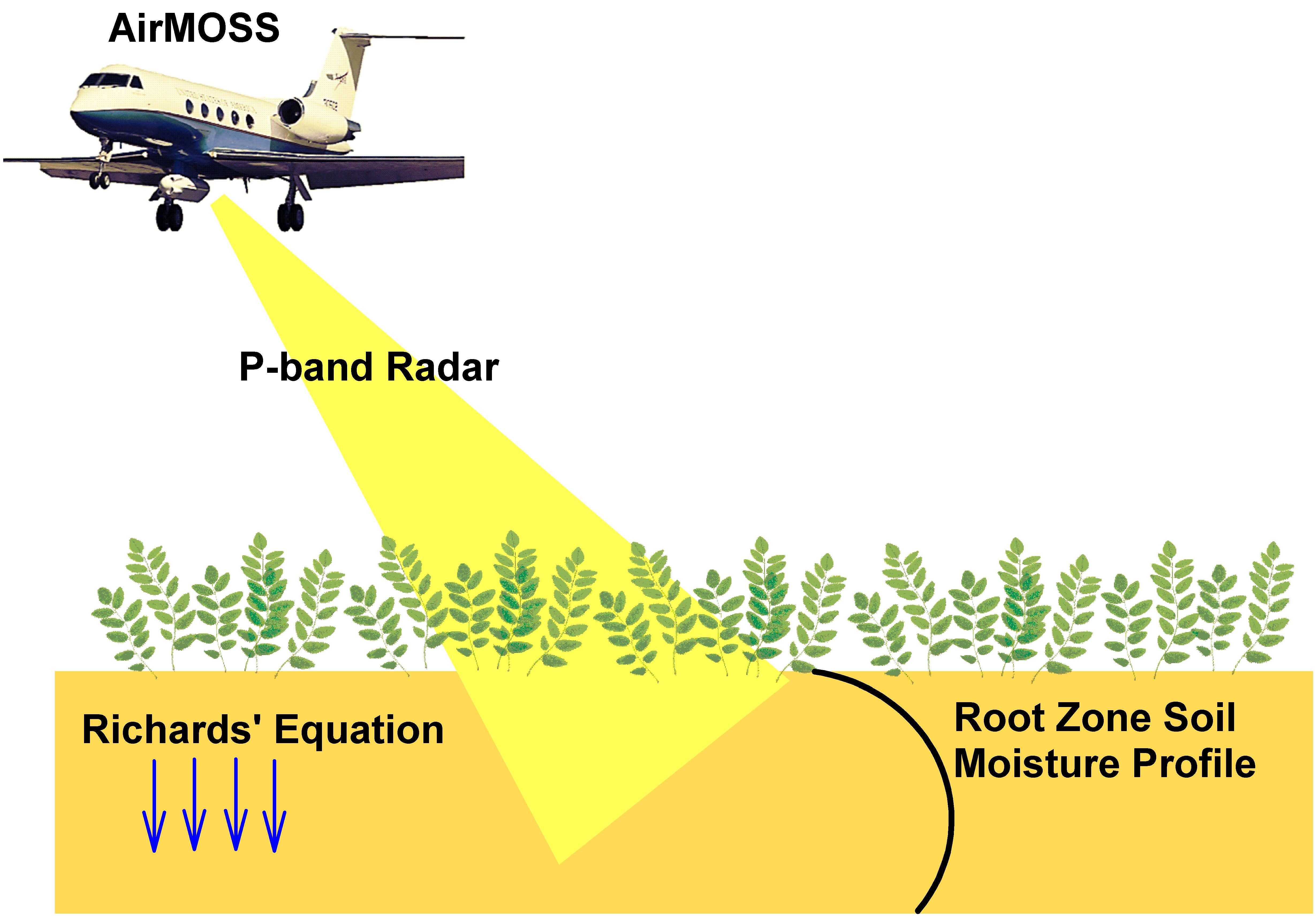
4. AirMOSS Retrieval Algorithm
4.1. Background
4.2. Considerations Regarding the New Model Application
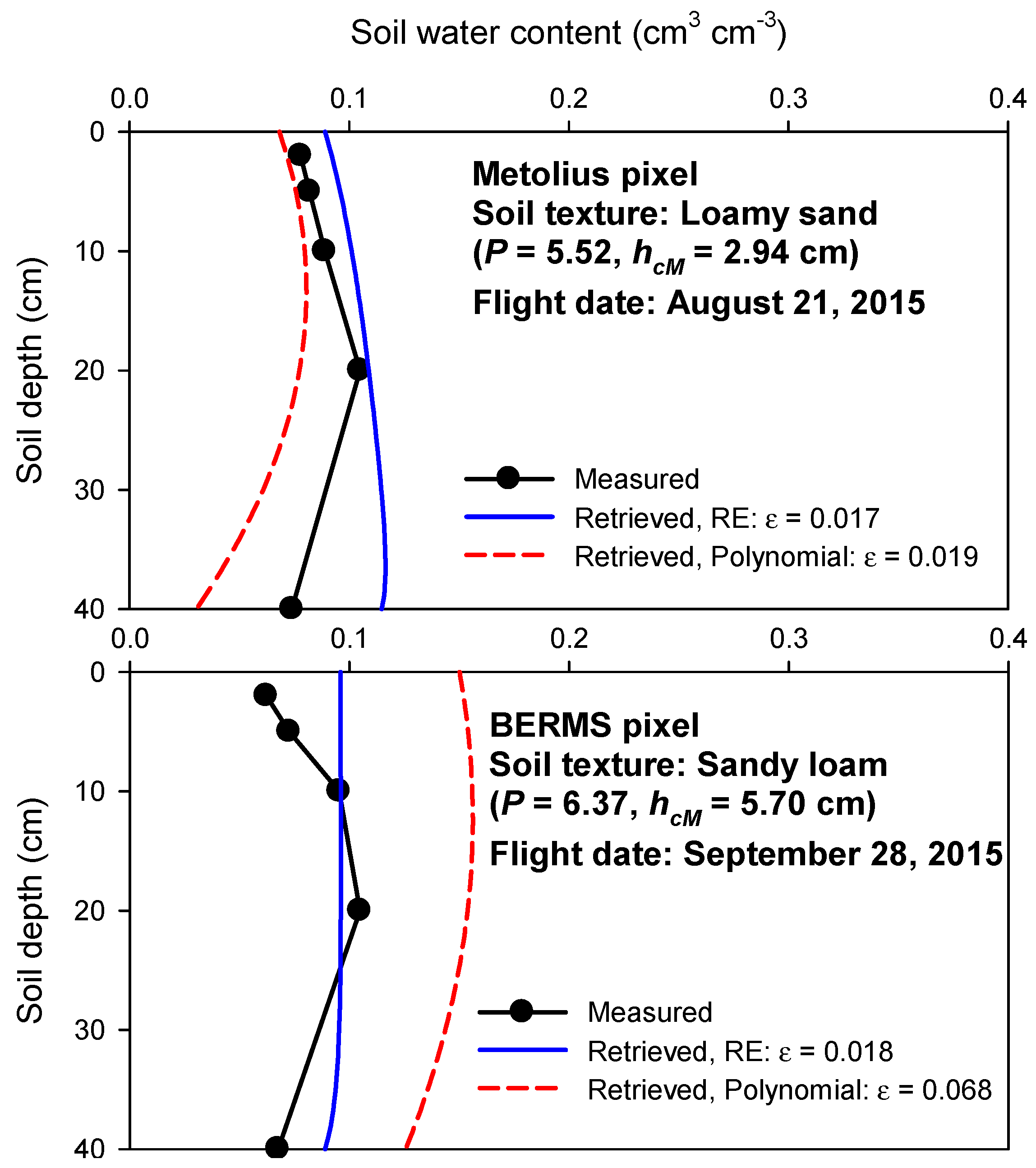
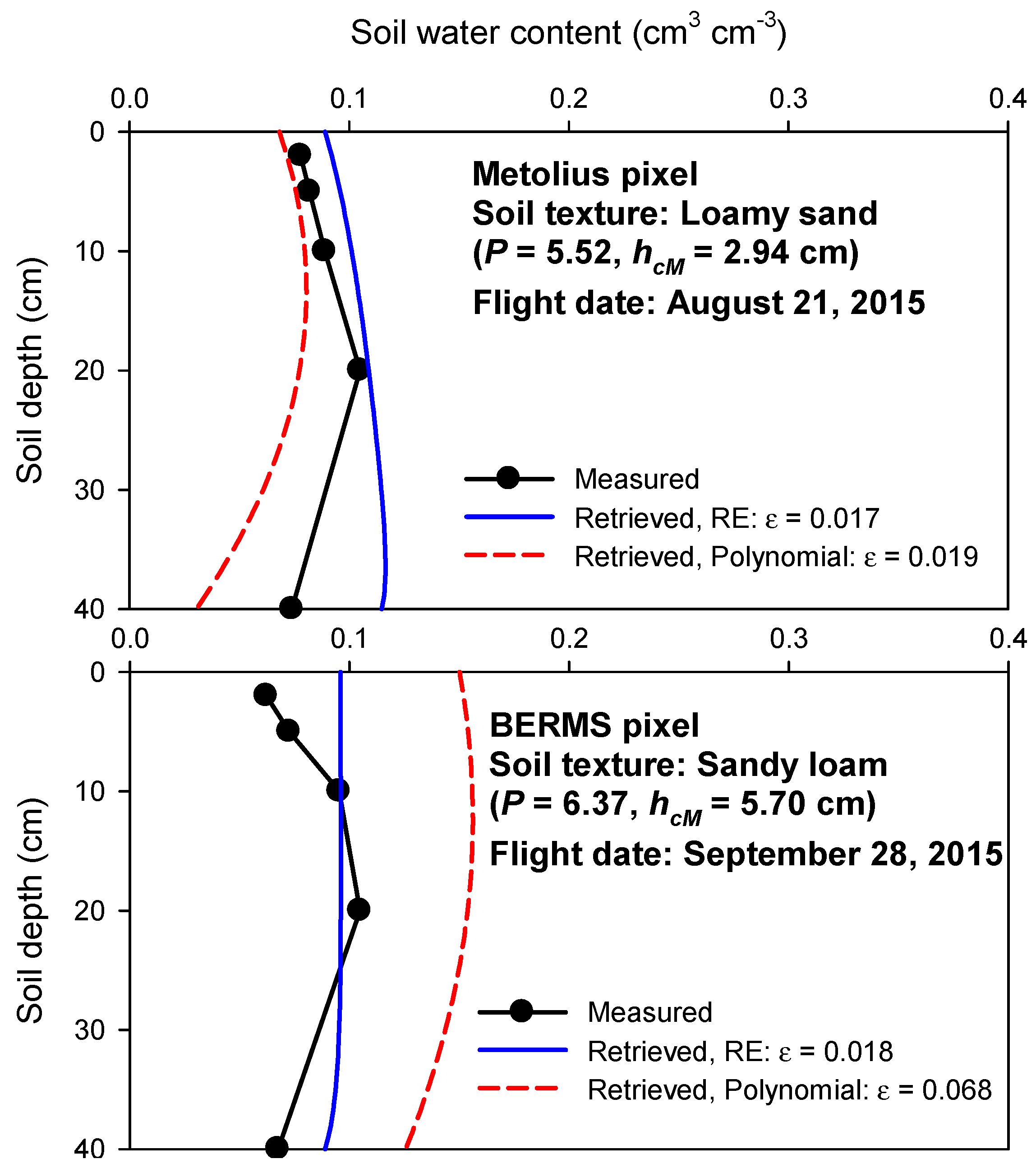
4.3. Preliminary Inversion Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Seneviratne, S.I.; Corti, T.; Davin, E.L.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A.J. Investigating soil moisture-climate interactions in a changing climate: A review. Earth Sci. Rev. 2010, 99, 125–161. [Google Scholar] [CrossRef]
- Robinson, D.A.; Campbell, C.S.; Hopmans, J.W.; Hornbuckle, B.K.; Jones, S.B.; Knight, R.; Ogden, F.; Selker, J.; Wendroth, O. Soil moisture measurements for ecological and hydrological watershed scale observatories: A review. Vadose Zone J. 2008, 7, 358–389. [Google Scholar] [CrossRef]
- Vereecken, H.; Huisman, J.A.; Bogena, H.; Vanderborght, J.; Vrugt, J.A.; Hopmans, J.W. On the value of soil moisture measurements in vadose zone hydrology: A review. Water Resour. Res. 2008. [Google Scholar] [CrossRef]
- Ochsner, T.E.; Cosh, M.; Cuenca, R.; Dorigo, W.; Draper, C.; Hagimoto, Y.; Kerr, Y.H.; Njoku, E.G.; Small, E.E.; Zreda, M. State of the art in large-scale soil moisture monitoring. Soil Sci. Soc. Am. J. 2013, 77, 1888–1919. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Güntner, A.; Hübner, C.; Kusche, J.; Jonard, F.; Vey, S.; Vereecken, H. Emerging methods for noninvasive sensing of soil moisture dynamics from field to catchment scale: A review. Adv. Rev. 2015, 2, 635–647. [Google Scholar] [CrossRef]
- Whiting, M.L.; Li, L.; Ustin, S.L. Predicting water content using Gaussian model on soil spectra. Remote Sens. Environ. 2004, 89, 535–552. [Google Scholar] [CrossRef]
- Sadeghi, M.; Jones, S.B.; Philpot, W.D. A linear physically-based model for remote sensing of soil moisture using short wave infrared bands. Remote Sens. Environ. 2015, 164, 66–76. [Google Scholar] [CrossRef]
- Verstraeten, W.W.; Veroustraete, F.; van der Sande, C.J.; Grootaers, I.; Feyen, J. Soil moisture retrieval using thermal inertia, determined with visible and thermal spaceborne data, validated for European forests. Remote Sens. Environ. 2006, 101, 299–314. [Google Scholar] [CrossRef]
- Carlson, T. An overview of the “triangle method” for estimating surface evapotranspiration and soil moisture from satellite imagery. Sensors 2007, 7, 1612–1629. [Google Scholar] [CrossRef]
- Hassan-Esfahani, L.; Torres-Rua, A.; Jensen, A.; McKee, M. Assessment of surface soil moisture using high-resolution multi-spectral imagery and artificial neural networks. Remote Sens. 2015, 7, 2627–2646. [Google Scholar] [CrossRef]
- Njoku, E.G.; Entekhabi, D. Passive microwave remote sensing of soil moisture. J. Hydrol. 1996, 184, 101–129. [Google Scholar] [CrossRef]
- Shi, J.; Jiang, L.; Zhang, L.; Chen, K.S.; Wigneron, J.P.; Chanzy, A.; Jackson, T.J. Physically based estimation of bare-surface soil moisture with the passive radiometers. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3145–3152. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.-P.; Ducharne, A.; Kerr, Y.; de Rosnay, P.; de Jeue, R.; Govind, A.; Al Bitar, A.; Albergel, C.; Muñoz-Sabater, J.; et al. Global-scale evaluation of two satellite-based passive microwave soil moisture datasets (SMOS and AMSR-E) with respect to land data assimilation system estimates. Remote Sens. Environ. 2014, 149, 181–195. [Google Scholar] [CrossRef]
- Tabatabaeenejad, A.; Burgin, M.; Moghaddam, M. P-band radar retrieval of subcanopy and subsurface soil moisture profile as a second order polynomial: First AirMOSS results. IEEE Trans. Geosci. Remote Sens. 2015, 53, 645–658. [Google Scholar] [CrossRef]
- Richards, L.A. Capillary conduction of liquids through porous mediums. J. Appl. Phys. 1931, 1, 318–333. [Google Scholar] [CrossRef]
- Warrick, A.W. Analytical solutions to the one-dimensional linearized moisture flow equation for arbitrary input. Soil Sci. 1975, 120, 79–84. [Google Scholar] [CrossRef]
- Chen, J.M.; Tan, Y.C.; Chen, C.H.; Parlange, J.Y. Analytical solutions for linearized Richards’ equation with arbitrary time-dependent surface fluxes. Water Resour. Res. 2001, 37, 1091–1093. [Google Scholar] [CrossRef]
- Tracy, F.T. Three-dimensional analytical solutions of Richards’ equation for a box-shaped soil sample with piecewise-constant head boundary conditions on the top. J. Hydrol. 2007, 336, 391–400. [Google Scholar] [CrossRef]
- Warrick, A.W. Additional solutions for steady-state evaporation from a shallow water table. Soil Sci. 1988, 146, 63–66. [Google Scholar] [CrossRef]
- Salvucci, G.D. An approximate solution for steady vertical flux of moisture through an unsaturated homogeneous soil. Water Resour. Res. 1993, 29, 3749–3753. [Google Scholar] [CrossRef]
- Sadeghi, M.; Shokri, N.; Jones, S.B. A novel analytical solution to steady-state evaporation from porous media. Water Resour. Res. 2012. [Google Scholar] [CrossRef]
- Hayek, M. An analytical model for steady vertical flux through unsaturated soils with special hydraulic properties. J. Hydrol. 2015, 527, 1153–1160. [Google Scholar] [CrossRef]
- Gardner, W.R. Solutions to the flow equation for the drying of soils and other porous media. Soil Sci. Soc. Am. Proc. 1959, 23, 183–187. [Google Scholar] [CrossRef]
- Novak, M.D. Quasi-analytical solutions of the soil water flow equation for problems of evaporation. Soil Sci. Soc. Am. J. 1988, 52, 916–924. [Google Scholar] [CrossRef]
- Suleiman, A.A.; Ritchie, J.T. Modeling soil water redistribution during second-stage evaporation. Soil Sci. Soc. Am. J. 2003, 67, 377–386. [Google Scholar] [CrossRef]
- Teng, J.; Yasufuku, N.; Liu, Q.; Liu, S. Analytical solution for soil water redistribution during evaporation process. Water Sci. Technol. 2013, 68, 2545–2551. [Google Scholar] [CrossRef] [PubMed]
- Warrick, A.W.; Lomen, D.O.; Islas, A. An analytical solution to Richards' equation for a draining soil profile. Water Resour. Res. 1990, 26, 253–258. [Google Scholar] [CrossRef]
- Broadbridge, P.; White, I. Constant rate rainfall infiltration: A versatile nonlinear mode1, l, analytical solution. Water Resour. Res. 1988, 24, 145–154. [Google Scholar] [CrossRef]
- Buckingham, E. Studies on the Movement of Soil Moisture; USDA, Bureau of Soils: Washington, DC, USA, 1907.
- Brooks, R.H.; Corey, A.T. Hydraulic properties of porous media. Colo. State Univ. Hydrol. Pap. 1964, 3, 27. [Google Scholar]
- Van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef]
- Tuller, M.; Or, D. Hydraulic conductivity of variably saturated porous media: Film and corner flow in angular pore space. Water Resour. Res. 2001, 37, 1257–1276. [Google Scholar] [CrossRef]
- Bakker, M.; Nieber, J.L. Damping of sinusoidal surface flux fluctuations with soil depth. Vadose Zone J. 2009, 8, 119–126. [Google Scholar] [CrossRef]
- Sadeghi, M.; Ghahraman, B.; Ziaei, A.N.; Davary, K.; Reichardt, K. Additional scaled solutions to Richards' equation for infiltration and drainage. Soil Tillage Res. 2012, 119, 60–69. [Google Scholar] [CrossRef]
- Morel-Seytoux, H.J.; Khanji, J. Derivation of an equation of infiltration. Water Resour. Res. 1974, 10, 795–800. [Google Scholar] [CrossRef]
- Simunek, J.; Sejna, M.; Saito, H.; Sakai, M.; van Genuchten, M.T. The HYDRUS-1D Software Package for Simulating the One-Dimensional Movement of Water, Heat, and Multiple Solutes in Variably-Saturated Media; Department of Environmental Sciences, University of California Riverside: Riverside, CA, USA, 2013. [Google Scholar]
- Sakai, M.; Jones, S.B.; Tuller, M. Numerical evaluation of subsurface soil water evaporation derived from sensible heat balance. Water Resour. Res. 2011. [Google Scholar] [CrossRef]
- Hayek, M. Water pulse migration through semi-infinite vertical unsaturated porous column with special relative-permeability functions: Exact solutions. J. Hydrol. 2014, 517, 668–676. [Google Scholar] [CrossRef]
- Hayek, M. Analytical solution to transient Richards’ equation with realistic water profiles for vertical infiltration and parameter estimation. Water Resour. Res. 2016, 52, 4438–4457. [Google Scholar] [CrossRef]
- Carsel, R.F.; Parrish, R.S. Developing joint probability distributions of soil water retention characteristics. Water Resour. Res. 1988, 24, 755–769. [Google Scholar] [CrossRef]
- Schaap, M.G.; Leij, F.J.; van Genuchten, M.T. ROSETTA: A computer program for estimating soil hydraulic parameters with hierarchical pedotransfer function. J. Hydrol. 2001, 251, 163–176. [Google Scholar] [CrossRef]
- Natural Resources Conservation Service. Soil Climate Analysis Network (SCAN) Data & Products. Available online: http://www.wcc.nrcs.usda.gov/scan/ (accessed on 23 December 2016).
- Mishra, V.; Ellenburg, W.L.; Al-Hamdan, O.Z.; Bruce, J.; Cruise, J.F. Modeling soil moisture profiles in irrigated fields by the principle of maximum entropy. Entropy 2015, 17, 4454–4484. [Google Scholar] [CrossRef]
- Sadeghi, M.; Tuller, M.; Gohardoust, M.R.; Jones, S.B. Column-scale unsaturated hydraulic conductivity estimates in coarse-textured homogeneous and layered soils derived under steady-state evaporation from a water table. J. Hydrol. 2014, 519, 1238–1248. [Google Scholar] [CrossRef]
- Stillman, S.; Ninneman, J.; Zeng, X.; Franz, T.; Scott, R.L.; Shuttleworth, W.J.; Cummins, K. Summer soil moisture spatiotemporal variability in southeastern Arizona. J. Hydrometeor. 2014, 15, 1473–1485. [Google Scholar] [CrossRef]
- Coopersmith, E.J.; Bell, J.E.; Cosh, M.H. Extending the soil moisture data record of the US Climate Reference Network (USCRN) and Soil Climate Analysis Network (SCAN). Adv. Water Resour. 2015, 79, 80–90. [Google Scholar] [CrossRef]
- Durden, S.L.; Van Zyl, J.J.; Zebker, H.A. Modeling and observation of the radar polarization signature of forested areas. IEEE Trans. Geosci. Remote Sens. 1989, 27, 290–301. [Google Scholar] [CrossRef]
- Burgin, M.; Clewley, D.; Lucas, R.M.; Moghaddam, M. A generalized radar backscattering model based on wave theory for multilayer multispecies vegetation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4832–4845. [Google Scholar] [CrossRef]
- Corana, A.; Marchesi, M.; Martini, C.; Ridella, S. Minimizing multimodal functions of continuous variables with the ‘Simulated Annealing’ algorithm. ACM Trans. Math. Softw. 1987, 13, 262–280. [Google Scholar] [CrossRef]
- AirMOSS Science Team. AirMOSS: L1 S-0 Polarimetric Data from AirMOSS P-band SAR, Metolius, 2012–2015; ORNL DAAC: Oak Ridge, TN, USA, 2016. Available online: http://dx.doi.org/10.3334/ORNLDAAC/1412 (accessed on 23 December 2016).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Texture | θr | θs | α (cm–1) | n | Ks (cm/Day) | P | hcM (cm) |
|---|---|---|---|---|---|---|---|
| Sand | 0.045 | 0.43 | 0.145 | 2.68 | 712.80 | 4.83 | 2.38 |
| Loamy sand | 0.057 | 0.41 | 0.124 | 2.28 | 350.20 | 5.52 | 2.94 |
| Sandy loam | 0.065 | 0.41 | 0.075 | 1.89 | 106.10 | 6.73 | 5.70 |
| Loam | 0.078 | 0.43 | 0.036 | 1.56 | 24.96 | 8.89 | 17.90 |
| Silt | 0.034 | 0.46 | 0.016 | 1.37 | 6.00 | 11.60 | 78.94 |
| Silt loam | 0.067 | 0.45 | 0.020 | 1.41 | 10.80 | 10.84 | 51.64 |
| Sandy clay loam | 0.100 | 0.39 | 0.059 | 1.48 | 31.44 | 9.79 | 13.46 |
| Clay loam | 0.095 | 0.41 | 0.019 | 1.31 | 6.24 | 13.05 | 100.39 |
| Silty clay loam | 0.089 | 0.43 | 0.010 | 1.23 | 1.68 | 16.00 | 481.18 |
| Sandy clay | 0.100 | 0.38 | 0.027 | 1.23 | 2.88 | 16.00 | 178.22 |
| Silty clay | 0.070 | 0.36 | 0.005 | 1.09 | 0.48 | 31.92 | 4.19 × 105 |
| Clay | 0.068 | 0.38 | 0.008 | 1.09 | 4.80 | 31.92 | 2.62 × 105 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sadeghi, M.; Tabatabaeenejad, A.; Tuller, M.; Moghaddam, M.; Jones, S.B. Advancing NASA’s AirMOSS P-Band Radar Root Zone Soil Moisture Retrieval Algorithm via Incorporation of Richards’ Equation. Remote Sens. 2017, 9, 17. https://doi.org/10.3390/rs9010017
Sadeghi M, Tabatabaeenejad A, Tuller M, Moghaddam M, Jones SB. Advancing NASA’s AirMOSS P-Band Radar Root Zone Soil Moisture Retrieval Algorithm via Incorporation of Richards’ Equation. Remote Sensing. 2017; 9(1):17. https://doi.org/10.3390/rs9010017
Chicago/Turabian StyleSadeghi, Morteza, Alireza Tabatabaeenejad, Markus Tuller, Mahta Moghaddam, and Scott B. Jones. 2017. "Advancing NASA’s AirMOSS P-Band Radar Root Zone Soil Moisture Retrieval Algorithm via Incorporation of Richards’ Equation" Remote Sensing 9, no. 1: 17. https://doi.org/10.3390/rs9010017
APA StyleSadeghi, M., Tabatabaeenejad, A., Tuller, M., Moghaddam, M., & Jones, S. B. (2017). Advancing NASA’s AirMOSS P-Band Radar Root Zone Soil Moisture Retrieval Algorithm via Incorporation of Richards’ Equation. Remote Sensing, 9(1), 17. https://doi.org/10.3390/rs9010017