
Four National Maps of Broad Forest Type Provide Inconsistent Answers to the Question of What Burns in Canada



Abstract
:
1. Introduction
2. Materials and Methods
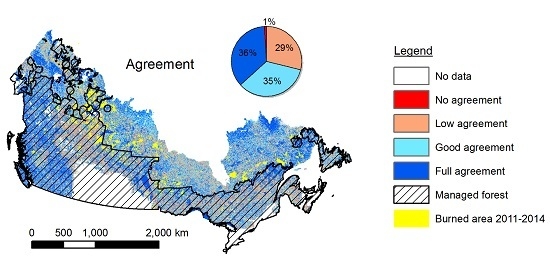
2.1. Burned Area Data
2.2. Land Cover Data
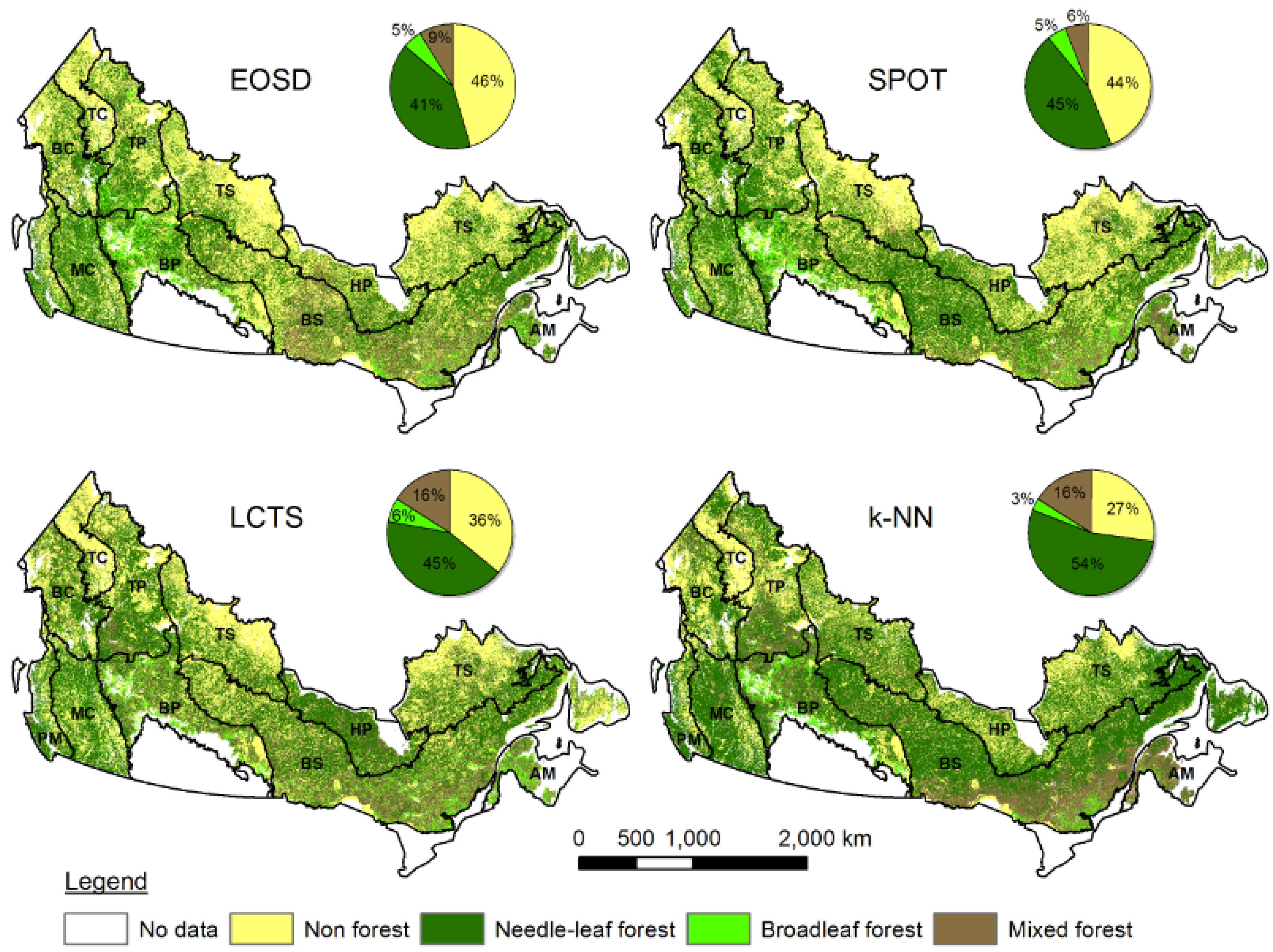
2.2.1. EOSD Land Cover
2.2.2. Medium-Resolution Land Cover Mapping of Canada from SPOT 4/5 Data
2.2.3. Canada’s MODIS Land Cover Time Series (LCTS)
2.2.4. Attributes of Canada’s Forests through k-NN and MODIS
2.3. Data Conditioning
2.4. Data Analysis
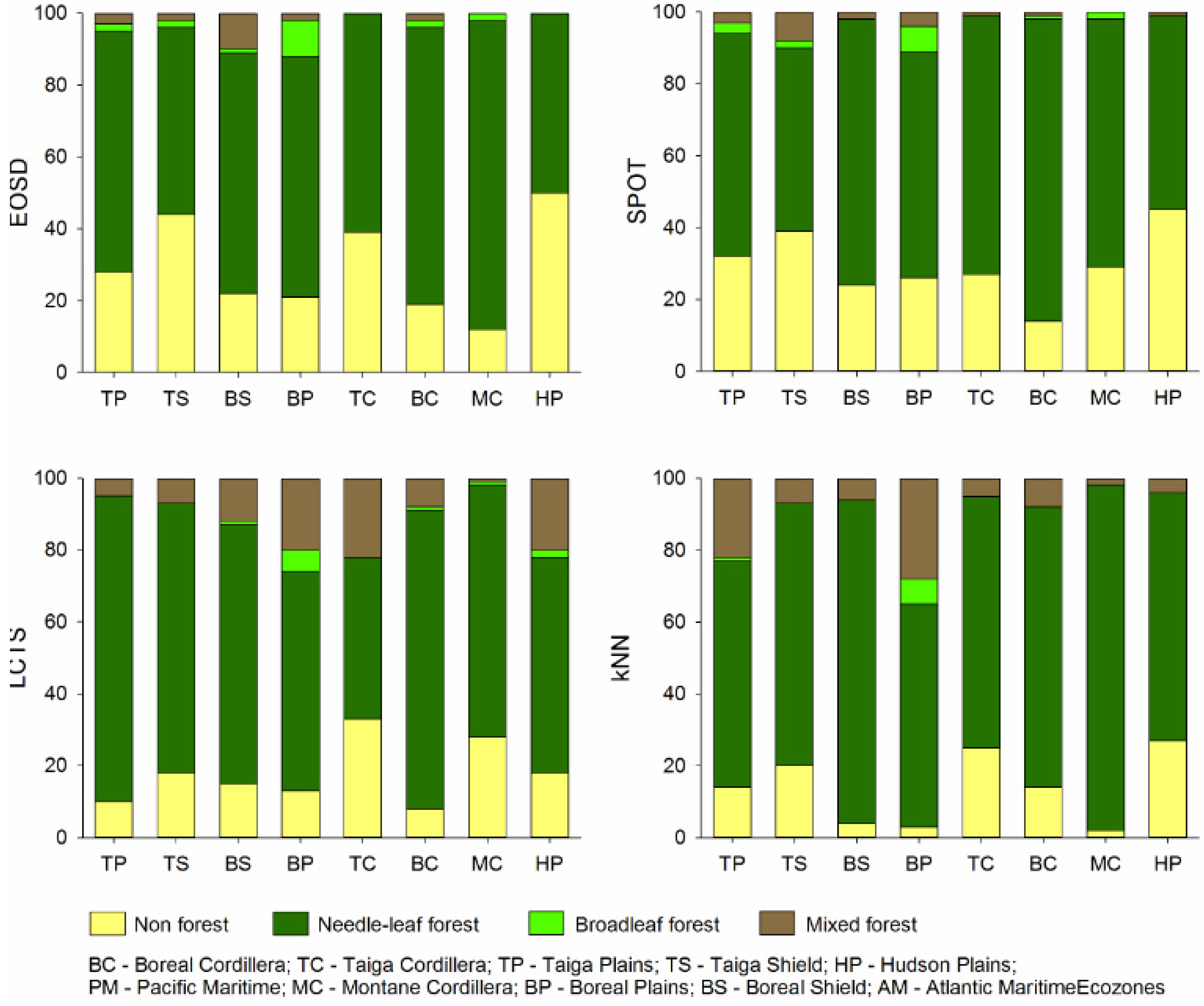
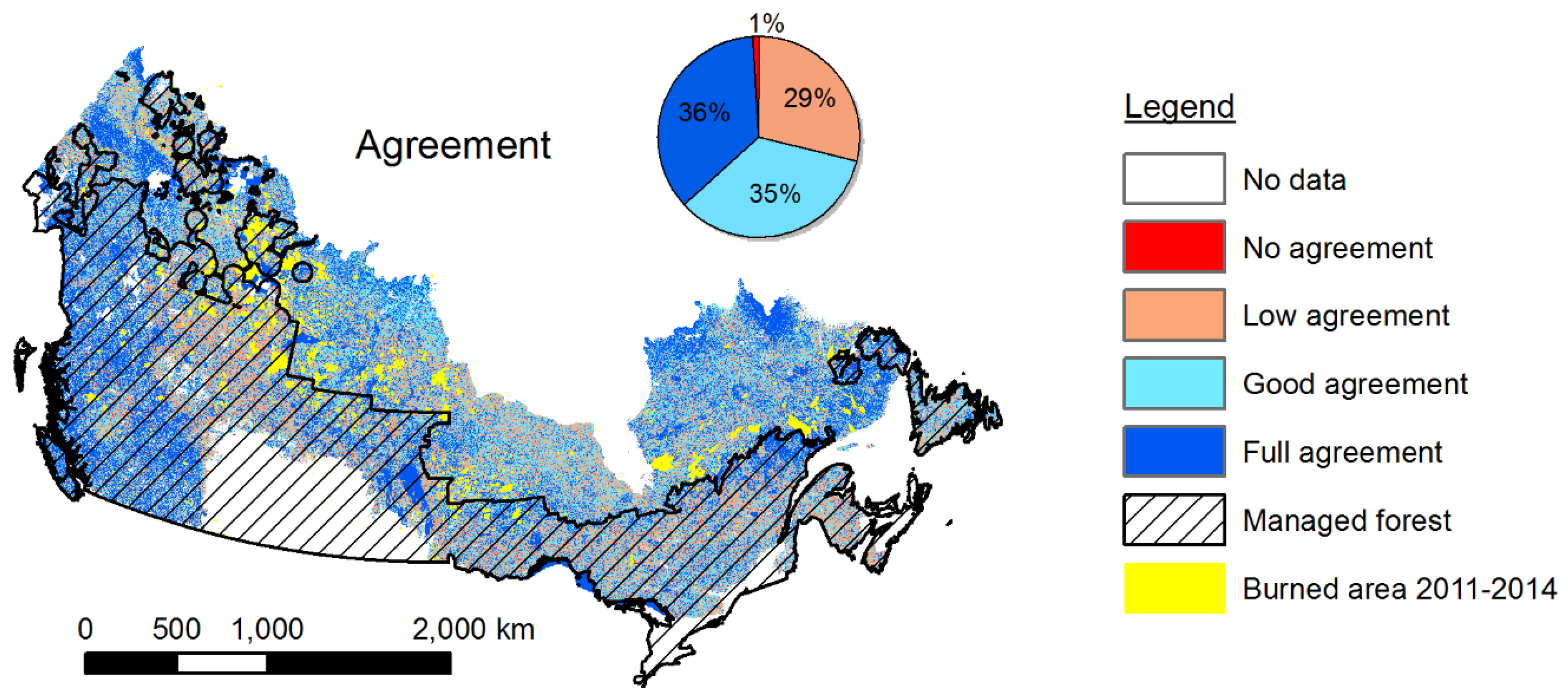
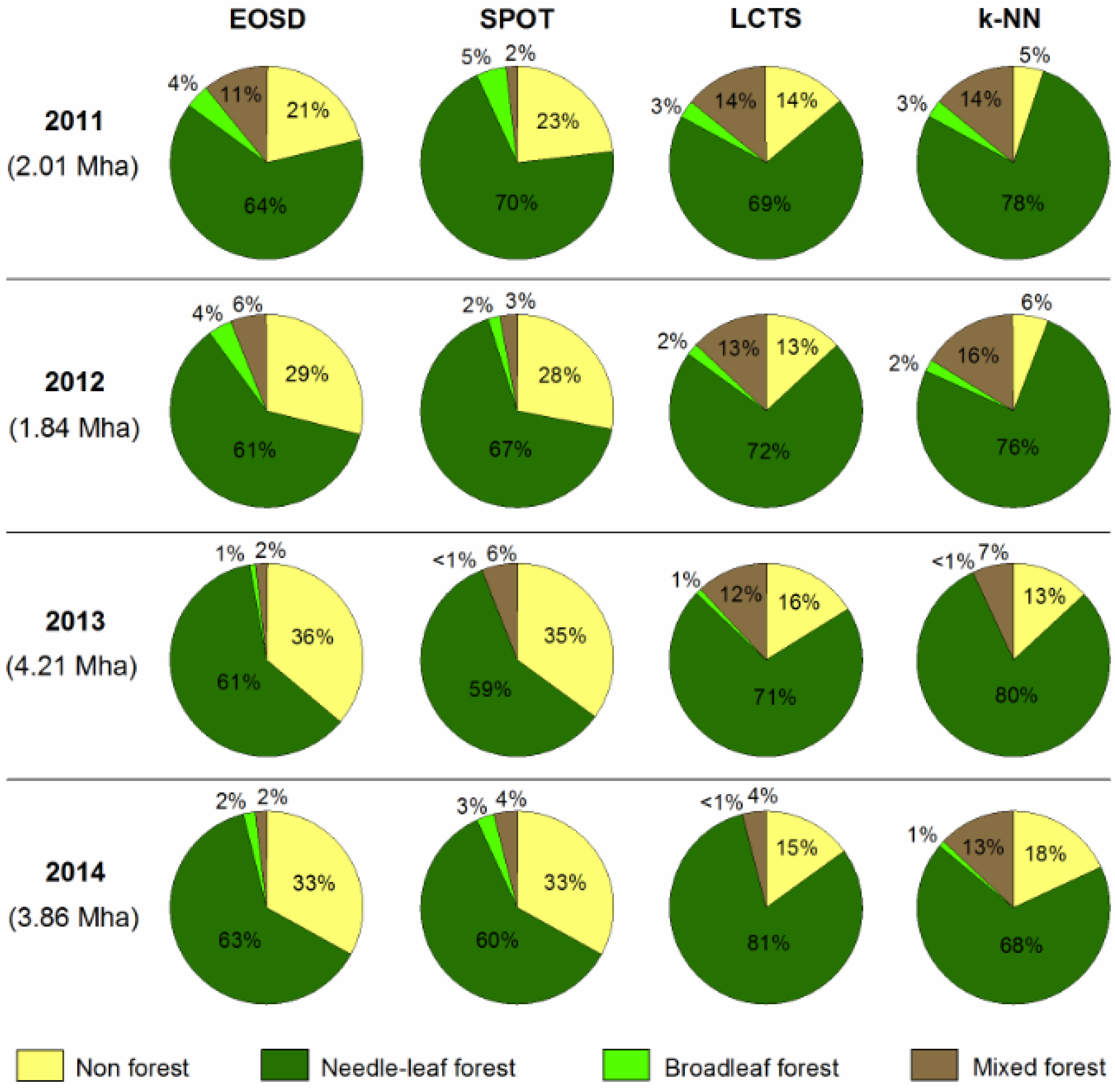
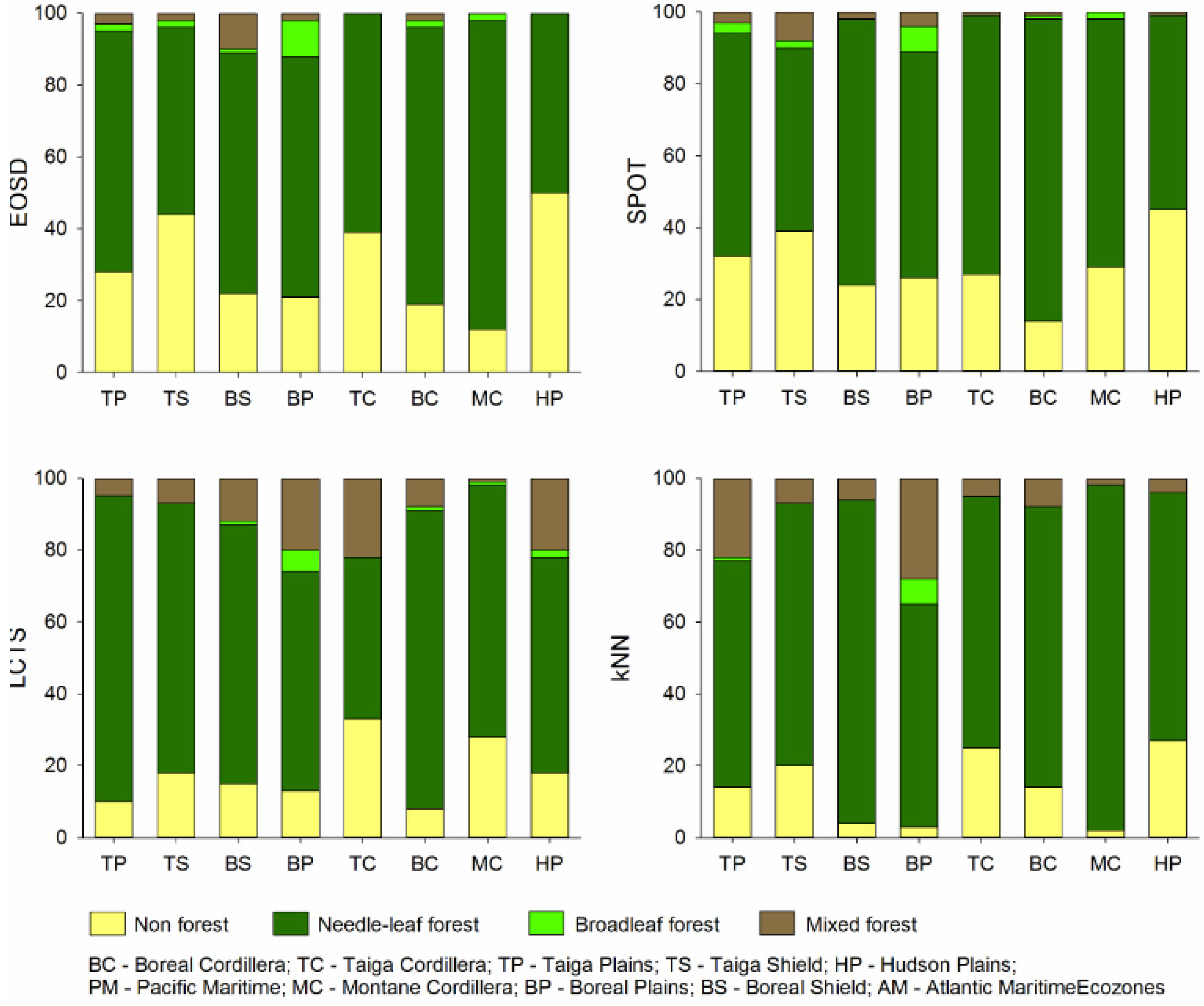
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- United Nations Framework Convention on Climate Change. Adoption of the Paris Agreement. Paris, France, 2015. Available online: http://unfccc.int/resource/docs/2015/cop21/eng/l09.pdf (accessed on 10 February 2016).
- Kurz, W.A.; Dymond, C.C.; Stinson, G.; Rampley, G.J.; Neilson, E.T.; Carroll, A.L.; Ebata, T.; Safranyik, L. Mountain pine beetle and forest carbon feedback to climate change. Nature 2008, 452, 987–990. [Google Scholar] [CrossRef] [PubMed]
- Natural Resources Canada. The State of Canada’s Forests. Annual Report 2015; Canadian Forest Service: Ottawa, ON, Canada, 2015.
- Boulanger, Y.; Gauthier, S.; Burton, P.; Vaillancourt, M.A. An alternative fire regime zonation for Canada. Int. J. Wildland Fire 2012, 21, 1052–1064. [Google Scholar] [CrossRef]
- Price, D.T.; Alfaro, R.I.; Brown, K.J.; Flannigan, M.D.; Fleming, R.A.; Hogg, E.H.; Girardin, M.P.; Lakusta, T.; Johnston, M.; McKenney, D.W.; et al. Anticipating the consequences of climate change for Canada’s boreal forest ecosystems. Environ. Rev. 2013, 21, 322–365. [Google Scholar] [CrossRef]
- Kurz, W.A.; Shaw, C.H.; Boisvenue, C.; Stinson, G.; Metsaranta, J.; Leckie, D.; Dyk, A.; Smyth, C.; Neilson, E.T. Carbon in Canada’s boreal forest—A synthesis. Environ. Rev. 2013, 21, 260–292. [Google Scholar] [CrossRef]
- Anderson, K.; Simpson, B.; Hall, R.J.; Englefield, P.; Gartrell, M.; Metsaranta, J.M. Integrating forest fuels and land cover data for improved estimation of fuel consumption and carbon emissions from boreal fires. Int. J. Wildland Fire 2015, 24, 665–679. [Google Scholar] [CrossRef]
- Stinson, G.; Kurz, W.A.; Smyth, C.E.; Neilson, E.T.; Dymond, C.C.; Metsaranta, J.M.; Boisvenue, C.; Rampley, G.J.; Li, Q.; White, T.M.; et al. An inventory-based analysis of Canada’s managed forest carbon dynamics, 1990 to 2008. Glob. Chang. Biol. 2011, 17, 2227–2244. [Google Scholar] [CrossRef]
- Giri, C.; Zhu, Z.; Reed, B. A comparative analysis of the Global Land Cover 2000 and MODIS land cover data sets. Remote Sens. Environ. 2005, 94, 123–132. [Google Scholar] [CrossRef]
- Fritz, S.; See, L.; Rembold, F. Comparison of global and regional land cover maps with statistical information for the agricultural domain in Africa. Int. J. Remote Sens. 2010, 31, 2237–2256. [Google Scholar] [CrossRef]
- Herold, M.; Mayaux, P.; Woodcock, C.E.; Baccini, A.; Schmullius, C. Some challenges in global land cover mapping: An assessment of agreement and accuracy in existing 1-ákm datasets. Remote Sens. Environ. 2008, 112, 2538–2556. [Google Scholar] [CrossRef]
- Kolden, C.A.; Abatzoglou, J.T. Wildfire consumption and interannual impacts by land cover in Alaskan boreal forest. Fire Ecol. 2012, 7, 98–114. [Google Scholar] [CrossRef]
- Ecological Stratification Working Group. A National Ecological Framework for Canada; Report and Map at 1:7 500,000 Scale; Agriculture and Agri-Food Canada, Research Branch, Centre for Land and Biological Resources Research: Ottawa, ON, Canada; Environment Canada, State of the Environment Directorate, Ecozone Analysis Branch: Hull, QC, Canada, 1995. [Google Scholar]
- De Groot, W.J.; Landry, R.; Kurz, W.A.; Anderson, K.R.; Englefield, P.; Fraser, R.H.; Hall, R.J.; Banfield, E.; Raymond, D.A.; Decker, V.; et al. Estimating direct carbon emissions from Canadian wildland fires. Int. J. Wildland Fire 2007, 16, 593–606. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Cranny, M.; Hall, R.J.; Luther, J.E.; Beaudoin, A.; Goodenough, D.G.; Dechka, J.A. Monitoring Canada’s forests. Part 1: Completion of the EOSD land cover project. Can. J. Remote Sens. 2008, 34, 549–562. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Magnussen, S.; McDonald, S. Validation of a large area land cover product using purpose-acquired airborne video. Remote Sens. Environ. 2007, 106, 480–491. [Google Scholar] [CrossRef]
- Olthof, I.; Latifovic, R.; Pouliot, D. Medium Resolution Land Cover Mapping of Canada from SPOT 4/5 Data. Geomatics Canada, Open File 4, 2015. Available online: http://ftp2.cits.rncan.gc.ca/pub/geott/ess_pubs/295/295751/of_0004_gc.pdf (accessed on 10 February 2016).
- Pouliot, D.; Latifovic, R.; Zabcic, N.; Guindon, L.; Olthof, I. Development and assessment of a 250 m spatial resolution MODIS annual land cover time series (2000–2011) for the forest region of Canada derived from change-based updating. Remote Sens. Environ. 2014, 140, 731–743. [Google Scholar] [CrossRef]
- Latifovic, R.; Homer, C.; Ressl, R.; Pouliot, D.; Hossain, S.N.; Colditz, R.R.; Olthof, I.; Giri, C.P.; Victoria, A. North American Land-Change Monitoring System. In Remote Sensing of Land Use and Land Cover; CRC Press: Ballyclare, UK, 2012; pp. 303–324. [Google Scholar]
- Beaudoin, A.; Bernier, P.Y.; Guindon, L.; Villemaire, P.; Guo, X.J.; Stinson, G.; Bergeron, T.; Magnussen, S.; Hall, R.J. Mapping attributes of Canada’s forests at moderate resolution through k-NN and MODIS imagery. Can. J. For. Res. 2014, 44, 521–532. [Google Scholar] [CrossRef]
- Jacobs, J. Quantitative measurement of food selection. Oecologia 1974, 14, 413–417. [Google Scholar] [CrossRef]
- Goodchild, M.F. Integrating GIS and remote sensing for vegetation analysis and modeling: Methodological issues. J. Veg. Sci. 1994, 5, 615–626. [Google Scholar] [CrossRef]
- Bartels, S.F.; Chen, H.Y.H.; Wulder, M.A.; White, J.C. Trends in post-disturbance recovery rates of Canada’s forests following wildfire and harvest. For. Ecol. Manag. 2016, 361, 194–207. [Google Scholar] [CrossRef]
- Tan, B.; Woodcock, C.E.; Hu, J.; Zhang, P.; Ozdogan, M.; Huang, D.; Yang, W.; Knyazikhin, Y.; Myneni, R.B. The impact of gridding artifacts on the local spatial properties of MODIS data: Implications for validation, compositing, and band-to-band registration across resolutions. Remote Sens. Environ. 2006, 105, 98–114. [Google Scholar] [CrossRef]
- Moody, A.; Woodcock, C.E. The influence of scale and the spatial characteristics of landscapes on land-cover mapping using remote sensing. Landsc. Ecol. 1995, 10, 363–379. [Google Scholar] [CrossRef]
- Latifovic, R.; Olthof, I. Accuracy assessment using sub-pixel fractional error matrices of global land cover products derived from satellite data. Remote Sens. Environ. 2004, 90, 153–165. [Google Scholar] [CrossRef]
- Bernier, P.Y.; Kurz, W.A.; Lemprière, T.C.; Ste-Marie, C.A. Blueprint for Forest Carbon Science in Canada: 2012–2020; Natural Resources Canada, Canadian Forest Service: Ottawa, ON, Canada, 2012. Available online: http://publications.gc.ca/collections/collection_2013/rncan-nrcan/Fo4-43-2012-eng.pdf (accessed on 8 February 2016).
- Ottmar, R.D.; Sandberg, D.V.; Riccardi, C.L.; Prichard, S.J. An overview of the fuel characteristic classification system—Quantifying, classifying, and creating fuel beds for resource planning. Can. J. For. Res. 2007, 37, 2383–2393. [Google Scholar] [CrossRef]
- Tsendbazar, N.E.; de Bruin, S.; Fritz, S.; Herold, M. Spatial accuracy assessment and integration of global land cover datasets. Remote Sens. 2015, 7, 15804–15821. [Google Scholar] [CrossRef]
- Castilla, G.; Hay, G.J. Uncertainties in land use data. Hydrol. Earth Syst. Sci. 2007, 11, 1857–1868. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Map (Year) | Land Cover Class | Non-Forest | Needle-Leaf Forest | Broadleaf Forest | Mixed Forest |
|---|---|---|---|---|---|
| EOSD (c. 2000) | Areas with <10% tree cover (includes water) | ≥10% tree cover, and ≥75% of basal area belongs to needle-leaf trees | ≥10% tree cover, and ≥75% of basal area belongs to broadleaf trees | ≥10% tree cover, and neither needle-leaf nor broadleaf exceed 75% of basal area | |
| SPOT (2005–2010) | Areas with <15% tree cover (includes water) | ≥15% overall tree cover and ≤2.5% of broadleaf tree cover | ≥15% overall tree cover and ≤2.5% of needle-leaf tree cover | ≥15% overall tree cover and >2.5% of both needle-leaf and broadleaf tree cover | |
| LCTS (2010) | Areas with <20% tree cover (includes water) | ≥20% tree cover, at least 75% of which belongs to needle-leaf trees | ≥20% tree cover, at least 75% of which belongs to broadleaf trees | ≥20% tree cover and neither needle-leaf nor broadleaf exceed 75% of tree cover | |
| k-NN (2001) | Areas with <10% tree cover (includes water) | ≥10% tree cover, at least 75% of which belongs to live needle-leaf plants | ≥10% tree cover, at least 75% of which belongs to live broadleaf plants | ≥10% tree cover and neither needle-leaf nor broadleaf exceed 75% of tree cover | |
| SPOT | EOSD | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N | C | D | M | % | N | C | D | M | % | ||||
| EOSD | N | 1935 | 759 | 74 | 90 | 68 | LCTS | N | 1697 | 473 | 36 | 50 | 75 |
| C | 649 | 1718 | 69 | 106 | 68 | C | 758 | 1632 | 60 | 186 | 62 | ||
| D | 66 | 91 | 94 | 65 | 30 | D | 134 | 57 | 98 | 64 | 28 | ||
| M | 77 | 263 | 66 | 141 | 26 | M | 269 | 379 | 123 | 247 | 24 | ||
| % | 71 | 61 | 31 | 35 | 62 | % | 59 | 64 | 31 | 45 | 59 | ||
| k-NN | SPOT | ||||||||||||
| N | C | D | M | % | N | C | D | M | % | ||||
| EOSD | N | 1391 | 1098 | 59 | 311 | 49 | LCTS | N | 1725 | 466 | 33 | 33 | 76 |
| C | 274 | 1965 | 20 | 283 | 77 | C | 684 | 1802 | 55 | 94 | 68 | ||
| D | 14 | 59 | 105 | 138 | 33 | D | 116 | 62 | 90 | 84 | 25 | ||
| M | 20 | 240 | 25 | 261 | 48 | M | 201 | 500 | 125 | 191 | 19 | ||
| % | 82 | 58 | 50 | 26 | 59 | % | 63 | 64 | 30 | 48 | 61 | ||
| k-NN | k-NN | ||||||||||||
| N | C | D | M | % | N | C | D | M | % | ||||
| SPOT | N | 1359 | 1064 | 56 | 247 | 50 | LCTS | N | 1259 | 812 | 28 | 157 | 56 |
| C | 312 | 2111 | 30 | 376 | 75 | C | 334 | 2007 | 14 | 281 | 76 | ||
| D | 12 | 66 | 83 | 141 | 28 | D | 32 | 73 | 101 | 146 | 29 | ||
| M | 14 | 120 | 40 | 228 | 57 | M | 73 | 470 | 66 | 409 | 40 | ||
| % | 80 | 63 | 40 | 23 | 60 | % | 74 | 60 | 48 | 41 | 60 | ||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castilla, G.; Rodrigue, S.; Skakun, R.S.; Hall, R.J. Four National Maps of Broad Forest Type Provide Inconsistent Answers to the Question of What Burns in Canada. Remote Sens. 2016, 8, 539. https://doi.org/10.3390/rs8070539
Castilla G, Rodrigue S, Skakun RS, Hall RJ. Four National Maps of Broad Forest Type Provide Inconsistent Answers to the Question of What Burns in Canada. Remote Sensing. 2016; 8(7):539. https://doi.org/10.3390/rs8070539
Chicago/Turabian StyleCastilla, Guillermo, Sebastien Rodrigue, Rob S. Skakun, and Ron J. Hall. 2016. "Four National Maps of Broad Forest Type Provide Inconsistent Answers to the Question of What Burns in Canada" Remote Sensing 8, no. 7: 539. https://doi.org/10.3390/rs8070539
APA StyleCastilla, G., Rodrigue, S., Skakun, R. S., & Hall, R. J. (2016). Four National Maps of Broad Forest Type Provide Inconsistent Answers to the Question of What Burns in Canada. Remote Sensing, 8(7), 539. https://doi.org/10.3390/rs8070539