
Advancements for Snowmelt Monitoring by Means of Sentinel-1 SAR

 ,
,
Abstract
:
1. Introduction
2. Data Characteristics
3. Methods
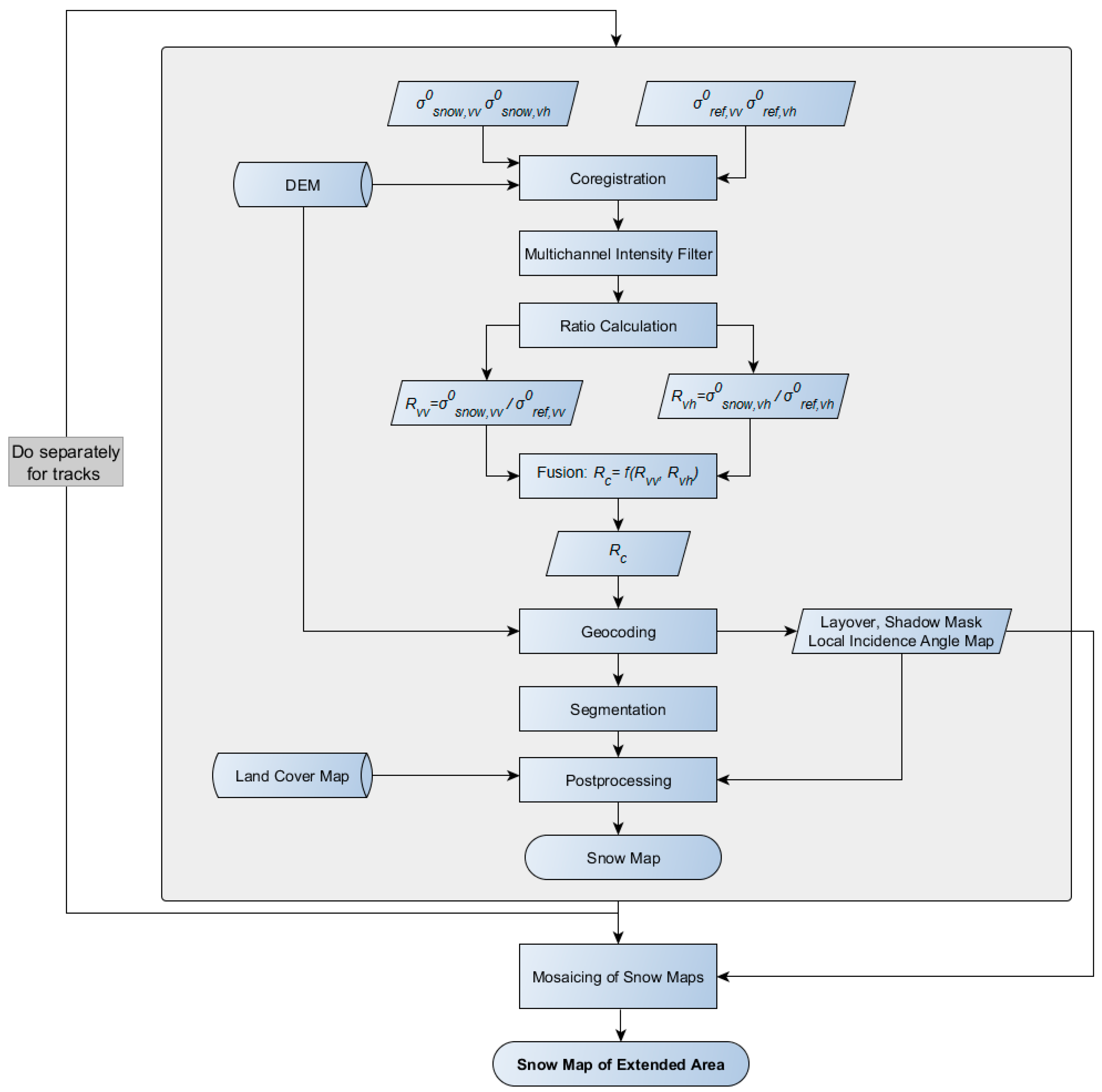
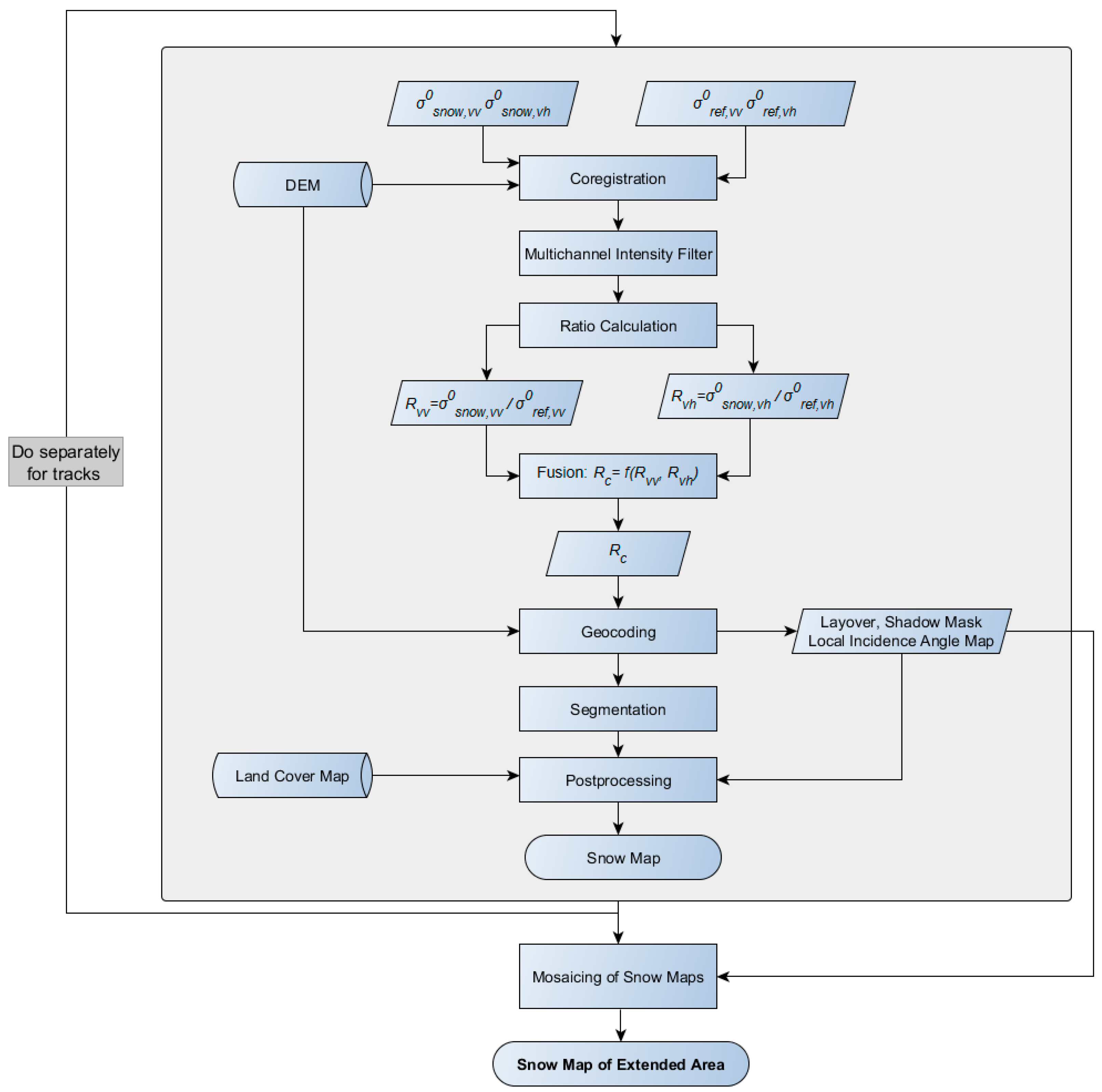
3.1. Classification Algorithm
3.2. Landsat Maps of Snow Extent
3.3. Comparison of Sentinel-1 and Landsat Snow Maps
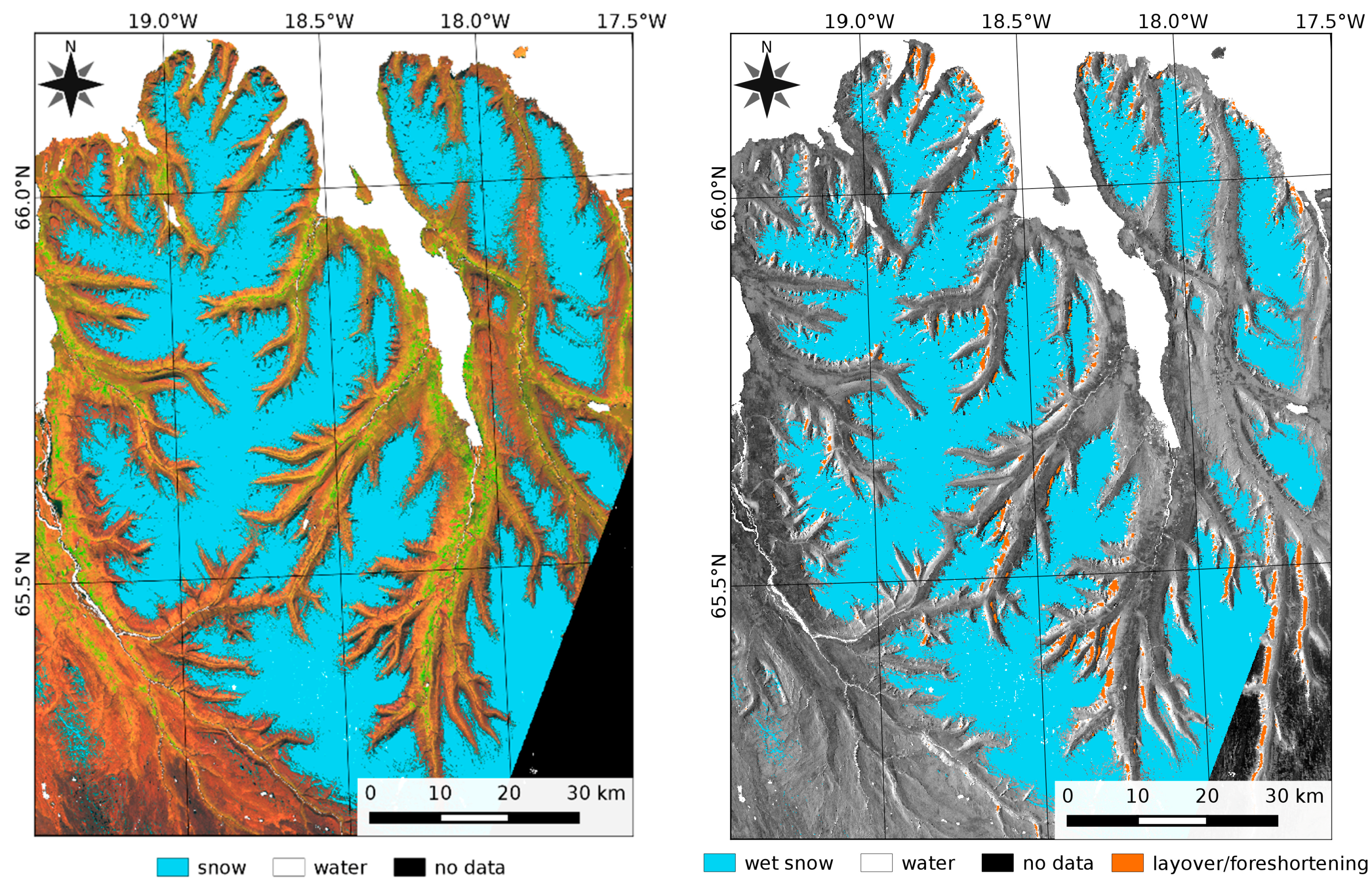
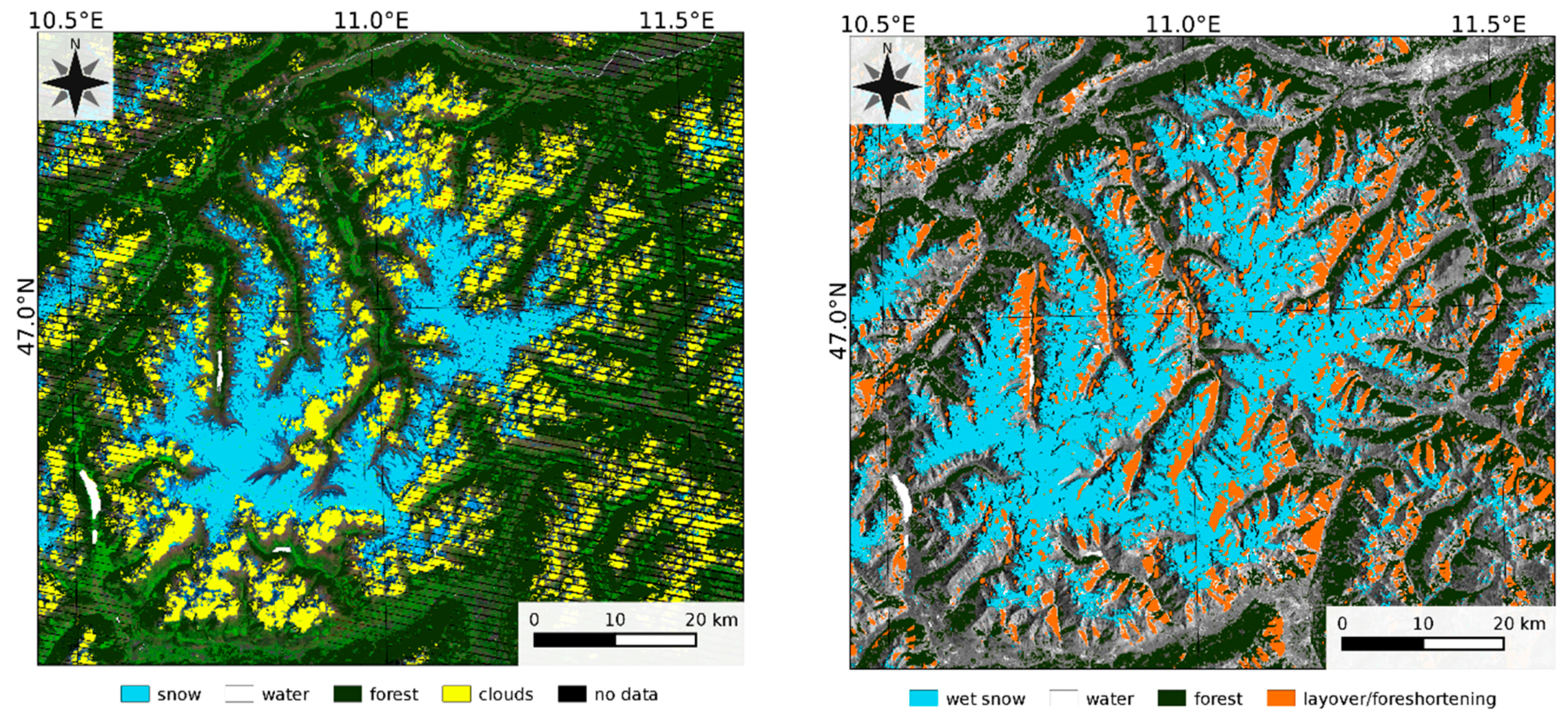
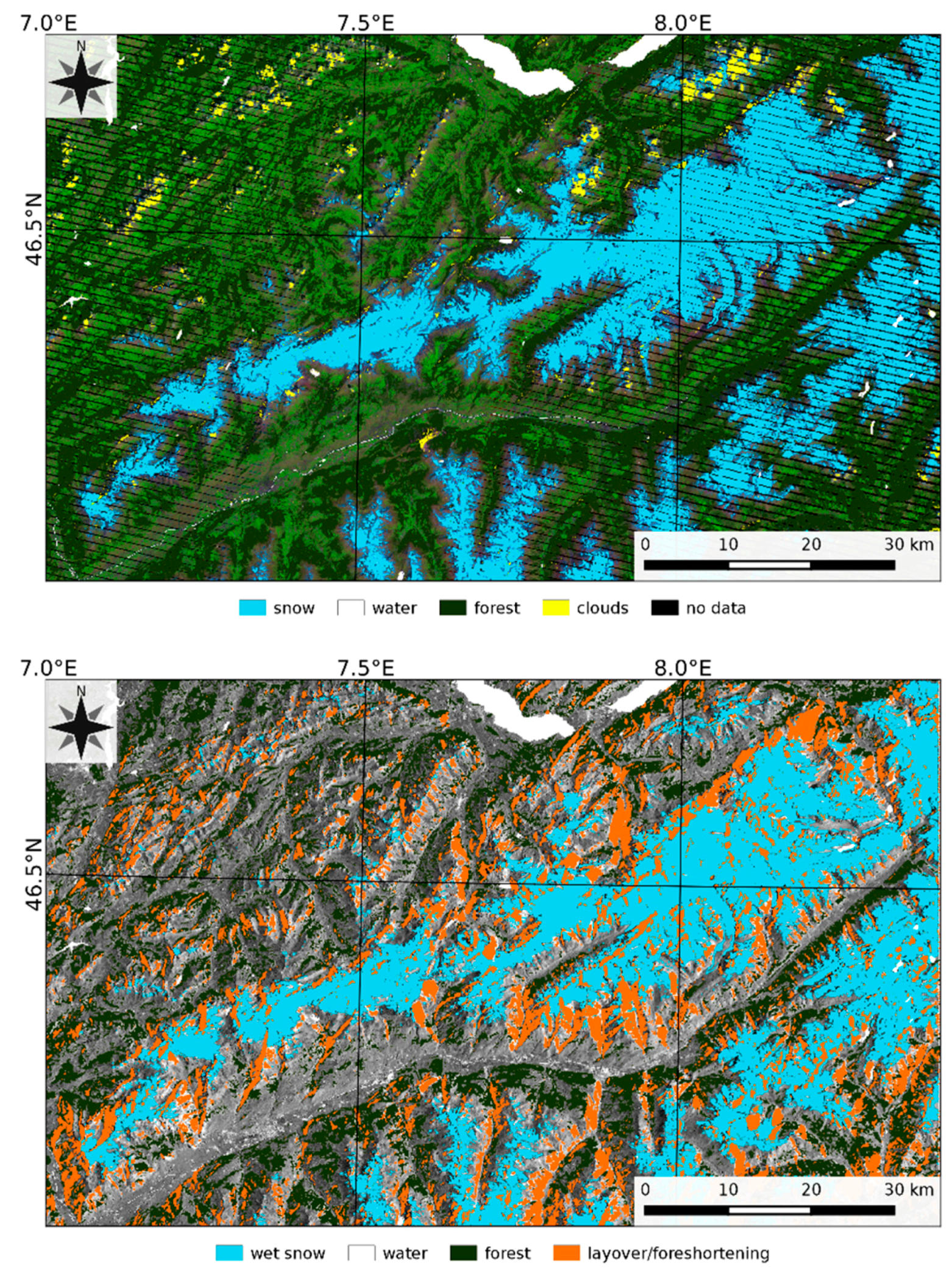
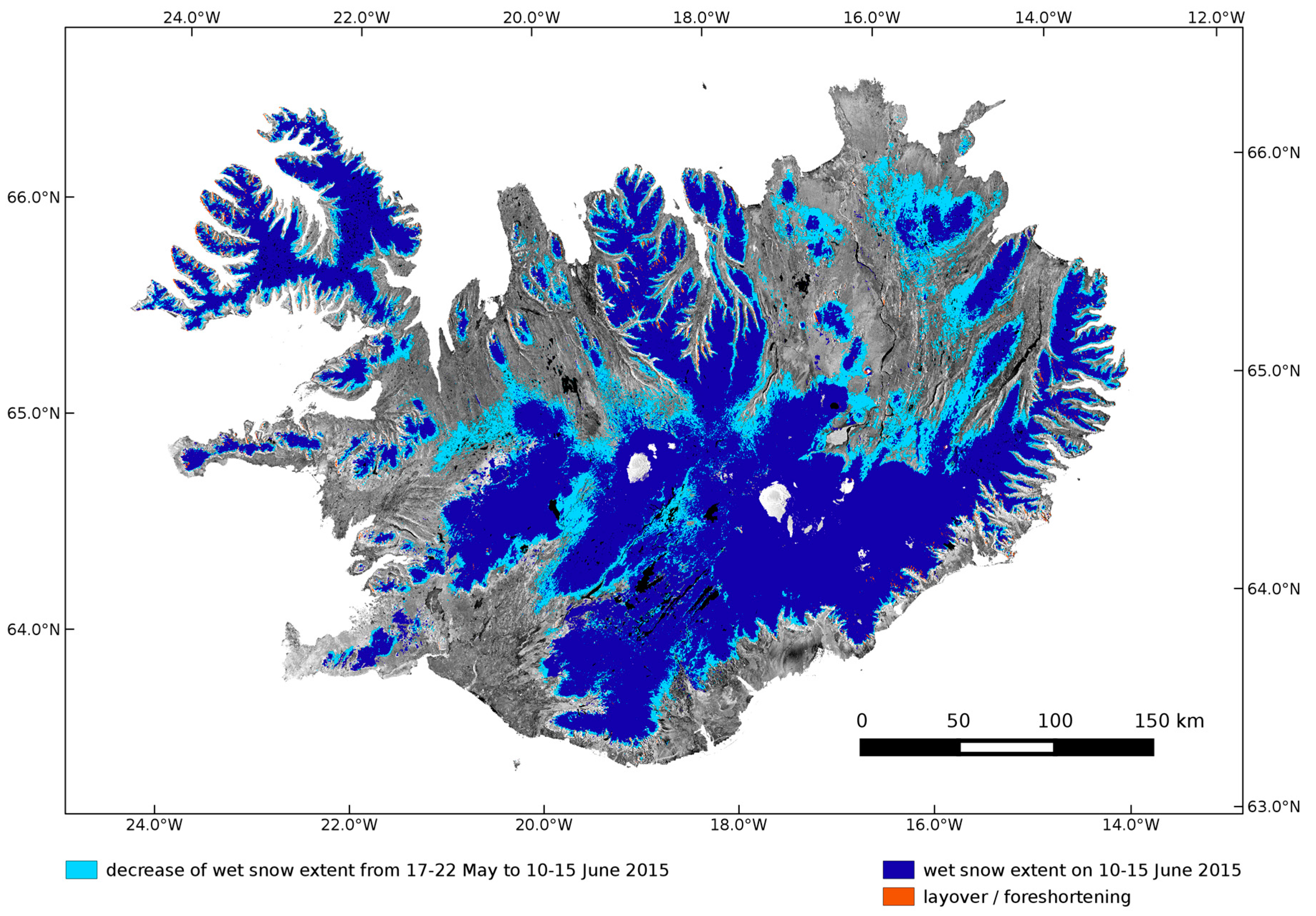
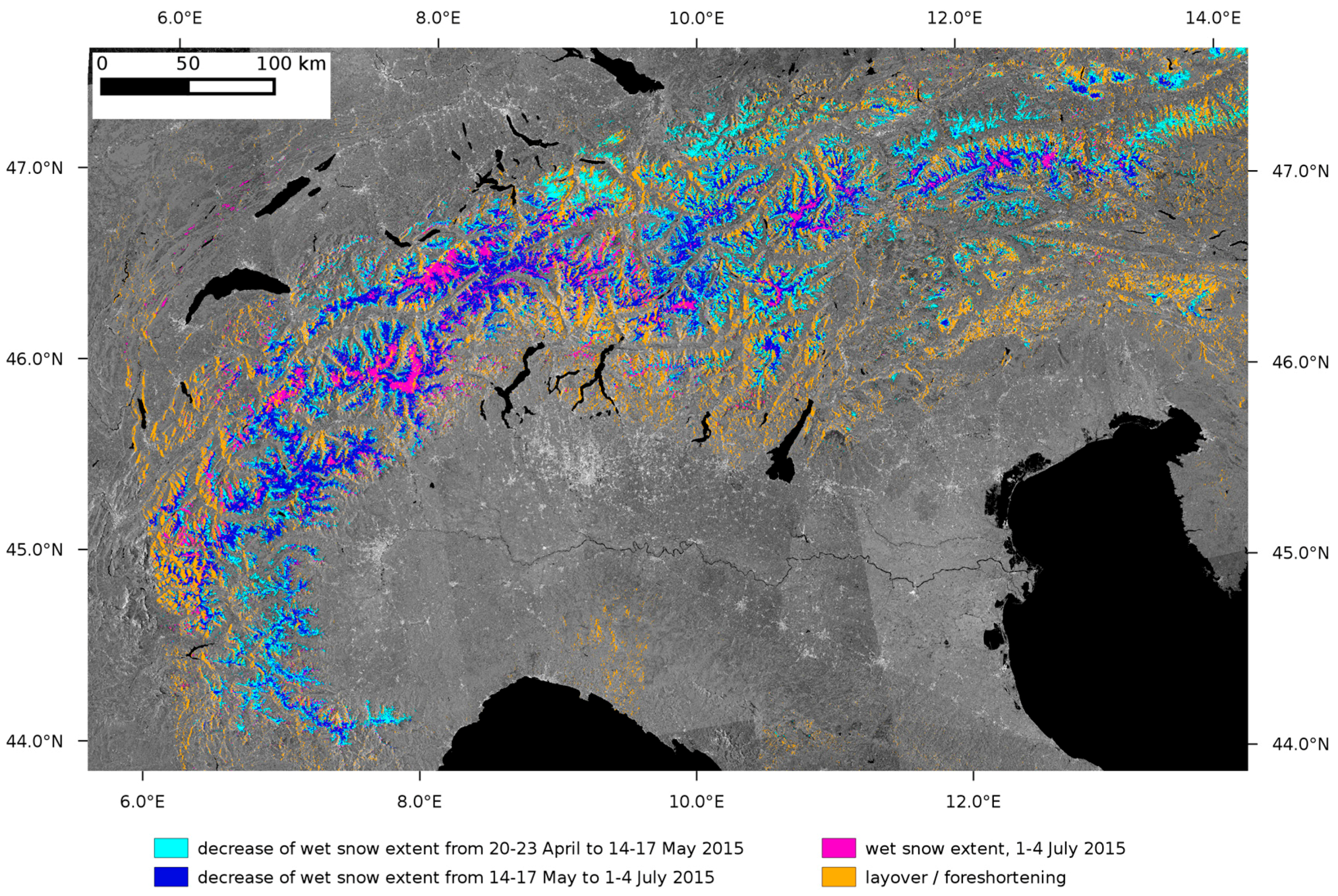
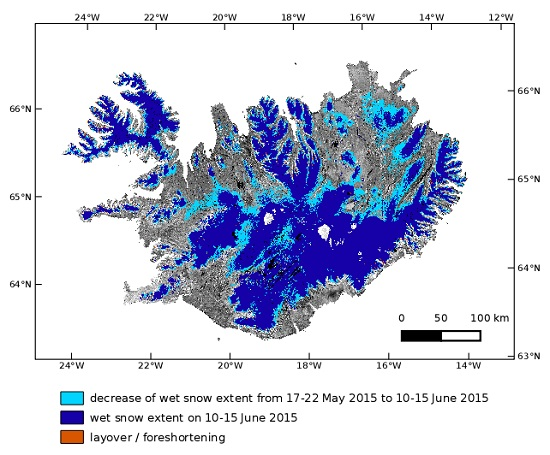
4. Sentinel-1 Snow Maps of Iceland and European Alps
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DEM | Digital Elevation Model |
| ENL | Effective Number of Looks |
| ESA | European Space Agency: |
| ETM+ | Enhanced Thematic Mapper |
| EW | Extra Wide swath mode |
| FFG | Austrian Research Promotion Agency |
| GB | Giga Byte |
| GLOVIS | Global Visualization Viewer |
| GMES | Global Monitoring for Environment and Security |
| GRD | Ground Range Detected |
| IW | Interferometric Wide swath mode |
| LOS | Line Of Sight |
| MODIS | Moderate-resolution Imaging Spectroradiometer |
| NESZ | Noise Equivalent Sigma-0 |
| OLCI | Ocean Land Color Instrument |
| OLI | Operational Land Imager |
| S1 | Sentinel-1 |
| SAR | Synthetic Aperture Radar |
| SLC | Single Look Complex |
| SLSTR | Sea Land Surface Temperature Radiometer |
| SM | Stripmap mode |
| SRTM | Shuttle Radar Topography Mission |
| TOPS | Terrain Observation with Progressive Scans |
| TOPSAR | Terrain Observation with Progressive Scans SAR |
| USGS | United States Geological Survey |
| UTM | Universal Transverse Mercator |
| VH | Vertical polarisation transmit and Horizontal polarisation receive |
| VV | Vertical polarisation transmit and Vertical polarisation receive |
| WV | Wave mode |
References
- Aschbacher, J.; Milagro-Peréz, M.P. The European Earth monitoring (GMES) programme: Status and perspectives. Remote Sens. Environ. 2012, 120, 3–8. [Google Scholar] [CrossRef]
- Copernicus—Application Domains. Available online: http://www.copernicus.eu/main/application-domains (accessed on 20 February 2016).
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Fletcher, K. Sentinel-1: ESA’s Radar Observatory Mission for GMES Operational Services; ESA SP-1322/1; ESA-ESTEC: Noordwijk, The Netherlands, 2012; p. 83. [Google Scholar]
- Pedersen, L.T.; Saldo, R.; Fenger-Nielsen, R. Sentinel-1 results: Sea ice operational monitoring. In Proceedings of the IEEE IGARSS, Milan, Italy, 26–31 July 2015; pp. 2828–2831.
- Nagler, T.; Rott, H.; Hetzenecker, M.; Wuite, J.; Potin, P. The Sentinel-1 Mission: New opportunities for ice sheet observations. Remote Sens. 2015, 7, 9371–9389. [Google Scholar] [CrossRef]
- Potin, P.; Rosich, B.; Roeder, J.; Bargellini, P. Sentinel-1 mission operations concept. In Proceedings of the IEEE IGARSS, Québec, QC, Canada, 13–18 July 2014; pp. 1465–1468.
- Malenovský, Z.; Rott, H.; Cihlar, J.; Schaepman, M.E.; García-Santos, G.; Fernandes, R.; Berger, M. Sentinels for Science: Potential of Sentinel-1, -2, and -3 missions for scientific observations of ocean, cryosphere and land. Remote Sens. Environ. 2012, 120, 91–101. [Google Scholar] [CrossRef]
- Baghdadi, N.; Gauthier, Y.; Bernier, M. Capability of multitemporal ERS-1 SAR data for wet snow mapping. Remote Sens. Environ. 1997, 60, 174–186. [Google Scholar] [CrossRef]
- Baghdadi, N.; Gauthier, Y.; Bernier, M.; Fortin, J.P. Potential and limitations of RADARSAT SAR data for wet snow monitoring. IEEE Trans. Geosci. Remote Sens. 2000, 38, 316–320. [Google Scholar] [CrossRef]
- Nagler, T.; Rott, H. Retrieval of wet snow by means of multitemporal SAR data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 754–765. [Google Scholar] [CrossRef]
- Nagler, T.; Rott, H.; Glendinning, G. Snowmelt runoff modelling by means of RADARSAT and ERS SAR. Can. J. Remote Sens. 2000, 26, 512–520. [Google Scholar] [CrossRef]
- Luojus, K.P.; Pulliainen, J.; Metsamaki, S.; Hallikainen, M. Snow-covered area estimation using satellite radar wide-swath images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 978–989. [Google Scholar] [CrossRef]
- Nagler, T.; Rott, H.; Malcher, P.; Müller, F. Assimilation of meteorological and remote sensing data for snowmelt runoff forecasting. Remote Sens. Environ. 2008, 112, 1408–1420. [Google Scholar] [CrossRef]
- Longepe, N.; Allain, S.; Ferro-Famil, L.; Pottier, E.; Durand, Y. Snowpack characterization in mountainous regions using C-Band SAR data and a meteorological model. IEEE Trans. Geosci. Remote Sens. 2009, 47, 406–418. [Google Scholar] [CrossRef]
- CryoLand-Copernicus Service Snow and Land Ice. Available online: http://www.cryoland.eu (accessed on 14 April 2016).
- Key, J.; Drinkwater, M.; Ukita, J. (Eds.) IGOS Cryosphere Theme Report; WMO/TD-1405; WMO: Geneva, Switzerland, 2007; p. 124.
- Miranda, N.; Meadows, P.J. Radiometric Calibration of S-1 Level-1 Products Generated by the S-1 IPF; ESA-EOPG-CSCOP-TN-0002; Technical Note. European Space Agency: Frascati, Italy, 2015; p. 13. Available online: https://sentinel.esa.int/documents/247904/685163/S1-Radiometric-Calibration-V1.0.pdf (accessed on 14 April 2016).
- Sentinel-1 Team. Sentinel-1 User Handbook; GMES-S1OP-EOPG-TN-13-0001. European Space Agency: Frascati, Italy, 2013; p. 80. Available online: https://sentinel.esa.int/documents/247904/ 685163/Sentinel-1_User_Handbook (accessed on 14 April 2016).
- Miranda, N.; Palumbo, G. Sentinel-1 Instrument and Product Performance Status. In Proceddings of the FRINGE 2015 Workshop, ESA-ESRIN, Frascati, Italy, 23–27 March 2015; Available online: http://seom.esa.int/fringe2015/files/presentation359.pdf (accessed on 18 February 2016).
- Miranda, N.; Meadows, P.; Hajduch, G.; Pilgrim, A.; Piantanida, R.; Giudici, D.; Small, D.; Schubert, A.; Husson, R.; Vincent, P.; et al. The Sentinel-1A instrument and operational product performance status. In Proceedings of the IEEE IGARSS, Milan, Italy, 26–31 July 2015; pp. 2824–2827.
- Knight, E.J.; Kvaran, G. Landsat-8 Operational Land Imager design, characterization, and performance. Remote Sens. 2014, 6, 10286–10305. [Google Scholar] [CrossRef]
- Storey, J.; Choate, M.; Lee, K. Landsat 8 Operational Land Imager on-orbit geometric calibration and performance. Remote Sens. 2014, 6, 11127–11152. [Google Scholar] [CrossRef]
- Shi, J.; Dozier, J. Inferring snow wetness using C-band data from SIR-C’s polarimetric synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 1995, 33, 905–914. [Google Scholar]
- Mätzler, C. Applications of the interaction of microwaves with the natural snow cover. Remote Sens. Rev. 1987, 2, 259–387. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Long, D. Microwave Radar and Radiometric Remote Sensing; University of Michigan Press: Ann Arbor, MI, USA, 2014; p. 1016. [Google Scholar]
- Reber, B.; Mätzler, C.; Schanda, E. Microwave signatures of snow crusts. Modeling and measurements. Int. J. Remote Sens. 1987, 8, 1649–1665. [Google Scholar] [CrossRef]
- Floricioiu, D.; Rott, H. Seasonal and short-term variability of multifrequency, polarimetric radar backscatter of alpine terrain from SIR-C/X-SAR and AIRSAR data. IEEE Trans. Geosc. Rem. Sens. 2001, 39, 2634–2648. [Google Scholar] [CrossRef]
- Strozzi, T.; Wiesman, A.; Mätzler, C. Active microwave signatures of snow covers at 5.3 and 35 GHz. Radio Sci. 1997, 32, 479–495. [Google Scholar] [CrossRef]
- Sansosti, E.; Berardino, P.; Manunta, M.; Serafino, F.; Fornaro, G. Geometrical SAR image registration. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2861–2870. [Google Scholar] [CrossRef]
- Quegan, S.; Yu, J.J. Filtering of multichannel SAR data. IEEE Trans. Geosc. Rem. Sens. 2001, 39, 2373–2379. [Google Scholar] [CrossRef]
- European Environment Agency. Digital Elevation Model over Europe (EU-DEM). Available online: http://www.eea.europa.eu/data-and-maps/data/eu-dem (accessed on 12 February 2016).
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- SRTM Water Body Dataset. Available online: https://lta.cr.usgs.gov/srtm_water_body_dataset (accessed on 12 February 2016).
- Crawford, C.J.; Manson, S.M.; Bauer, M.E.; Hall, D.K. Multitemporal snow cover mapping in mountainous terrain for Landsat climate data record development. Remote Sens. Environ. 2013, 135, 224–233. [Google Scholar] [CrossRef]
- Crawford, C.J. MODIS Terra Collection 6 fractional snow cover validation in mountainous terrain during spring snowmelt using Landsat TM and ETM+. Hydrol. Process. 2015, 29, 128–138. [Google Scholar] [CrossRef]
- Potin, P.; Rosich, B.; Miranda, N.; Grimont, P.; Bargellini, P.; Monjoux, E.; Martin, J.; Desnos, Y.-L.; Roeder, J.; Shurmer, I. Sentinel-1 mission status. In Proceedings of the IEEE IGARSS, Milan, Italy, 26–31 July 2015; pp. 2820–2823.
- Karam, M.A.; Amar, F.; Fung, A.K.; Mougin, E.; Lopes, A.; Vine, D.M.L.; Beaudoin, A. A microwave polarimetric scattering model for forest canopies based on vector radiative transfer theory. Remote Sens. Environ. 1995, 53, 16–30. [Google Scholar] [CrossRef]
- Koskinen, J.T.; Pulliainen, J.T.; Luojus, K.P.; Takala, M. Monitoring of snow cover properties during the spring melting period in forested areas. IEEE Trans. Geosci. Remote Sens. 2010, 48, 50–58. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 Mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Centre Frequency | Swath Width | Incidence Angle | Nominal Resolution GR × AZ | Pixel Spacing LOS × AZ | Maximum NESZ | Radiom. Stability (3σ) | Radiom. Accuracy (3σ) |
|---|---|---|---|---|---|---|---|
| 5.407 GHz | 250 km | 31°–46° | 5 m × 20 m | 2.4 m × 13.9 m | −22 dB | 0.5 dB | 1.0 dB |
| Study Area | Satellite | Date & Time (UTC) | Lat/Lon | Sun Elev. |
|---|---|---|---|---|
| A1, Tröllaskagi, Iceland | Landsat-8 | 27 June 2015 12:45 | 65.59° N/19.98° W | 47.3° |
| A2, Ötztal Alps, Austria | Landsat-7 | 5 June 2015 10:03 | 47.45° N/11.02° E | 61.4° |
| A3, Swiss Alps | Landsat-7 | 3 June 2015 10:16 | 46.03° N/7.39° E | 62.1° |
| Study Area | Date & Time UTC | Orbit Heading | Track Nr. | θ |
|---|---|---|---|---|
| A1, Tröllaskagi, Iceland | 26 June 2015 07:41 | Descending | 9 | 40° |
| A2, Ötztal Alps, Austria | 2 June 2015 05:26 | Descending | 168 | 37° |
| A3, Swiss Alps | 7 June 2015 05:35 | Descending | 66 | 42° |
| Area | Rvv | Rvh | Rc | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| S1-S | S1-F | AR | S1-S | S1-F | AR | S1-S | S1-F | AR | ||
| A1 | LS-S | 92.8 | 7.2 | 92.6 | 7.4 | 94.6 | 5.4 | |||
| LS-F | 2.0 | 98.0 | 0.2 | 99.8 | 0.2 | 99.8 | ||||
| 0.954 | 0.962 | 0.972 | ||||||||
| A2 | LS-S | 80.7 | 19.3 | 94.5 | 6.4 | 94.7 | 5.3 | |||
| LS-F | 4.2 | 95.8 | 5.3 | 94.7 | 3.2 | 97.8 | ||||
| 0.882 | 0.946 | 0.962 | ||||||||
| A3 | LS-S | 72.9 | 27.1 | 93.6 | 6.4 | 92.2 | 7.8 | |||
| LS-F | 6.5 | 93.5 | 4.6 | 95.4 | 3.1 | 96.9 | ||||
| 0.832 | 0.945 | 0.946 | ||||||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagler, T.; Rott, H.; Ripper, E.; Bippus, G.; Hetzenecker, M. Advancements for Snowmelt Monitoring by Means of Sentinel-1 SAR. Remote Sens. 2016, 8, 348. https://doi.org/10.3390/rs8040348
Nagler T, Rott H, Ripper E, Bippus G, Hetzenecker M. Advancements for Snowmelt Monitoring by Means of Sentinel-1 SAR. Remote Sensing. 2016; 8(4):348. https://doi.org/10.3390/rs8040348
Chicago/Turabian StyleNagler, Thomas, Helmut Rott, Elisabeth Ripper, Gabriele Bippus, and Markus Hetzenecker. 2016. "Advancements for Snowmelt Monitoring by Means of Sentinel-1 SAR" Remote Sensing 8, no. 4: 348. https://doi.org/10.3390/rs8040348
APA StyleNagler, T., Rott, H., Ripper, E., Bippus, G., & Hetzenecker, M. (2016). Advancements for Snowmelt Monitoring by Means of Sentinel-1 SAR. Remote Sensing, 8(4), 348. https://doi.org/10.3390/rs8040348