Abstract
Urban fringe is the transition zone fine grained with urban and non-urban land cover types. The complex landscape mosaic in this area challenges the land cover classification based on the remote-sensing data. Spectral signatures are not efficient to discriminate all pixels into classes. To improve the recognition and handle the uncertainty, this paper provides a novel integrated approach, based on a fuzzy rough set and evidential reasoning (FRSER), for land cover classification in an urban fringe area. The approach is implemented on Landsat Operation Land Imager data covering the urban fringe area of Wuhan city, China. A fuzzy rough set is first used to define a decision table from multispectral imagery and ground reference data. Then the fuzzy rough information system is interpreted using the Dempster–Shafer theory, based on an evidential reasoning system. A final land cover classification with uncertainty is achieved by evidential reasoning. The results are compared with the traditional maximum likelihood classifier (MLC) and some rough set-based classifiers including classical rough set classifier (RS), fuzzy rough set classifier (FRS), and variable precision fuzzy rough set classifier (VPFRS). The better overall accuracy, user’s and producer’s accuracies, and the kappa coefficient, in comparison with the other classifiers, suggest that the proposed approach can effectively discriminate land cover types in urban fringe areas with high inter-class similarities and intra-class heterogeneity. It is also capable of handling the uncertainty in data processing, and the final land cover map comes with a degree of uncertainty. The proposed approach that can efficiently integrate the merits of both the fuzzy rough set and DS theory provides an efficient method for urban fringe land cover classification.
1. Introduction
Urban fringe is the transition zone with an intermixture of urban land use and rural land use. Studying the land cover and its temporal evolution in the urban fringe area is an important way to understand the urban sprawl process. Remote sensing, developed over recent decades, has become a time- and cost-efficient way for mapping the urban fringe area and its changes [1,2,3]. Over the past few years, quality remote-sensing imagery with high spatial, spectral and temporal resolution has become popular in the applications of the earth surface environment. The quality imagery helps improve the discernibility for the complex landscape mosaic in the urban fringe area. Besides the quality imagery, the classification techniques used are also important for the urban fringe land cover information extraction. The well-established classification techniques will lead to more accurate and appropriate outcomes for the given remote-sensing imagery [4,5,6].
With the development of the remote-sensing techniques, a great number of imagery classification methods have been introduced for land cover extraction. These approaches, supersized and unsupervised, are established on the wide range of basic or novel recognition algorithms, such as maximum likelihood, fuzzy logic, decision tree, artificial neural networks, and support vector machines [7,8,9,10,11]. However, the land cover classification performance cannot be effectively increased by only improving the recognition algorithms in an urban fringe environment. Because of the complexity of land cover composition in the urban fringe area and its restricted discernibility in remote-sensing imagery, land cover classification is accompanied by uncertainty or vagueness. For example, the urban fringe areas of a typical Chinese city show mosaics of built-up, exposed bare ground for future construction, and agriculture land cover types such as farmland and fishponds. The post-harvest farmland has similar spectral signatures with the exposed bare ground and built-up land cover types, and the fishponds are also similar to the shade of high-rise buildings. The spectral signatures are not capable of unambiguous classification of all pixels. Most of the previously developed methods focused on improving recognition and paid less attention to quantifying and modeling uncertainties during image data processing; therefore, the overall accuracy of the classification may improve to some degree, but confidence in the final output is unknown for individual pixels or image objects. The development of new algorithms to quantify uncertainty during classification and improve the performance is important for urban fringe land cover extraction.
Rough set theory, proposed by Pawlak [12,13,14,15], offers a comprehensive approach to analyze and quantize the uncertainty or vagueness in a decision by computing the lower and upper approximations. The rough set theory is already being used to handle the limited discernibility in remote-sensing imagery [16,17,18,19,20,21,22]. A rough set-based imagery classifier is a rule-induction system that comprises a set of features (attributes) and the related decision rules for classification. The features in the system refer to the spectral bands and its derivations, such as texture and band math. Rough set theory provides an objective way to minimize the features set and extract classification rules for remote-sensing imagery [18]. In addition to rule-based decision systems, the rough set method can also be integrated with other imagery classification methods, such as support vector machines, neural networks, and particle swarms, to build a hybrid classifier [5,23,24]. Usually, a rough set is used to construct the decision information system and reduce the features in these applications. The hybrid approaches are especially attractive because they take the merits both from the rough set and other intelligent data-mining methods to improve the classification performance [21].
Rough set theory is built on discrete data, and it is not appropriate for handling the continuum data. However, remote-sensing data contains integer-valued features (e.g., spectral bands) or real-valued features (e.g., textural information), which are considered as continuums. Therefore, the discretization of features is an important issue in RS-based imagery classification systems [18]. There are mainly two types of discretion, namely user-defined approaches [25,26] and statistical-based approaches [27,28], used in practical applications. A user-defined method selects the truncation points based on the expert knowledge, while a statistical-based method selects the truncation points based on statistical characteristics, thereby overcoming the subjectivity of a user-defined method [29].
Although rough set theory can handle vagueness or uncertainty, current rough set-based classification methods also have restrictions with an application to the urban fringe. First, the discretization for transforming the value of a continuous attribute into a finite number of intervals may lead to information loss and make the poor spectral signatures worse [20]. Secondly, the rule-induction-based classification system uses a decision table to identify a finite number of optimal rules for a classification task. This may lead to a large amount of unclassified pixels in the urban fringe area [30,31], and the attribute discretization process may intensify the indiscernibility. Thirdly, combined methods based on rough set theory may avoid unclassified pixels; however, these methods cannot produce interpretive measures such as degree of support, plausibility, and uncertainty, which are useful to indicate the ambiguous urban fringe land cover classification.
The introduction of fuzzy theory into RS-based classification is an efficient way of reducing information loss and improving discernibility in an urban fringe environment. A gradual change from membership to non-membership instead of abrupt truncation points for features discretization can provide a suitable model to reserve the detail information for classification and improve the discernibility. Fuzzy set theory can also be used to find and quantize the uncertainty in the boundary between classes [23]. A fuzzy classifier produces a measure of the degree of similarity for every class, which is also called a class membership. The similarity measure or the membership indicates the uncertainty between the classes and provides more details about the urban fringe land cover classification [32]. Fuzzy rough theory, which is an extension of classical rough set theory, provides a solid foundation for handling a fuzzified rough set [33,34].
The integration of rough sets and different computing methods, especially machine-learning methods, has become popular in the last ten years. Since the hybrid decision system avoids the simple rule induction on original datasets, it is more efficient in discernibility for imagery classification [23]. In these hybrid systems, rough set theory is usually used to structure the machine-learning methods. However, these machine-learning methods cannot handle the vagueness or uncertainty of a rough set system in an expressive way. The Dempster–Shafer (DS) theory-based evidential reasoning is an inexact reasoning method that enables representation of the imprecision and uncertainty in a decision system [35,36]. The DS reasoning system provides a more flexible and general approach to handle the uncertainty in imagery classification with limited discernibility and has been used in a variety of land cover classification case studies [37,38,39,40,41]. Therefore, the use of fuzzy rough set theory to construct a DS classification system may help improve discernibility and measure important factors such as the degree of support, plausibility, and uncertainty in the urban fringe land cover classification.
In this study, a supervised classification model, based on fuzzy rough set and evidential reasoning (FRSER), is designed to handle indiscernibility and uncertainty between patterns in urban fringe land cover classification. In the proposed method, the continuum-valued remote-sensing imagery data is discretized and integrated into an interval-valued fuzzy information system, and then a new soft classification method is constructed for the fuzzy rough set in combination with evidential reasoning. Finally, a method is proposed for measuring the indiscernibility and uncertainty in the classification.
2. Preliminaries
2.1. Fuzzy Rough Set
Let denote an information system, where is a non-empty finite set of objects called the universe of discourse and is a non-empty finite set of attributes. Let be an equivalence relation on , and an equivalence class introduced by , which contains , is denoted by . Let denote the family of all fuzzy subsets of , for . A fuzzy rough set is a tuple , where and of are fuzzy sets of . The membership functions that define the lower and upper approximations of the fuzzy rough set can be denoted by [42]
Here, and are the membership values of in and , respectively, inf and sup denote the infimum and supremum operator, respectively, denotes membership of , and denotes the degree to which and are related to .
There is an important measure in rough set theory, namely approximation quality. Measures of the quality of the lower and upper approximations of a fuzzy rough set are given respectively by
2.2. Evidential Reasoning
The DS theory provides two functions, namely plausibility () and belief (), to represent the imprecision and uncertainty in an evidence reasoning system. The plausibility and belief are both derived from a mass function (). Let denote the family of all fuzzy-valued subsets of , then is defined by
According to Denœux [43], the fuzzy belief and plausibility functions are given by
where and denote the conditional necessity measure and possibility measure, respectively, and are defined by
2.3. Interpretation of Evidential Reasoning on Fuzzy Rough Set
Several studies have focused on the relationship between rough set theory and the DS-based evidential reasoning [44,45]. These studies show that belief (plausibility) functions can be derived from a classic Pawlak rough set. Moreover, the approximation quality in a rough set is a belief (plausibility) function [46]. The fuzzy rough set theory is an extension of the classical Pawlak rough set, and it can therefore be verified that
3. Methodology
3.1. Study Area and Data Processing
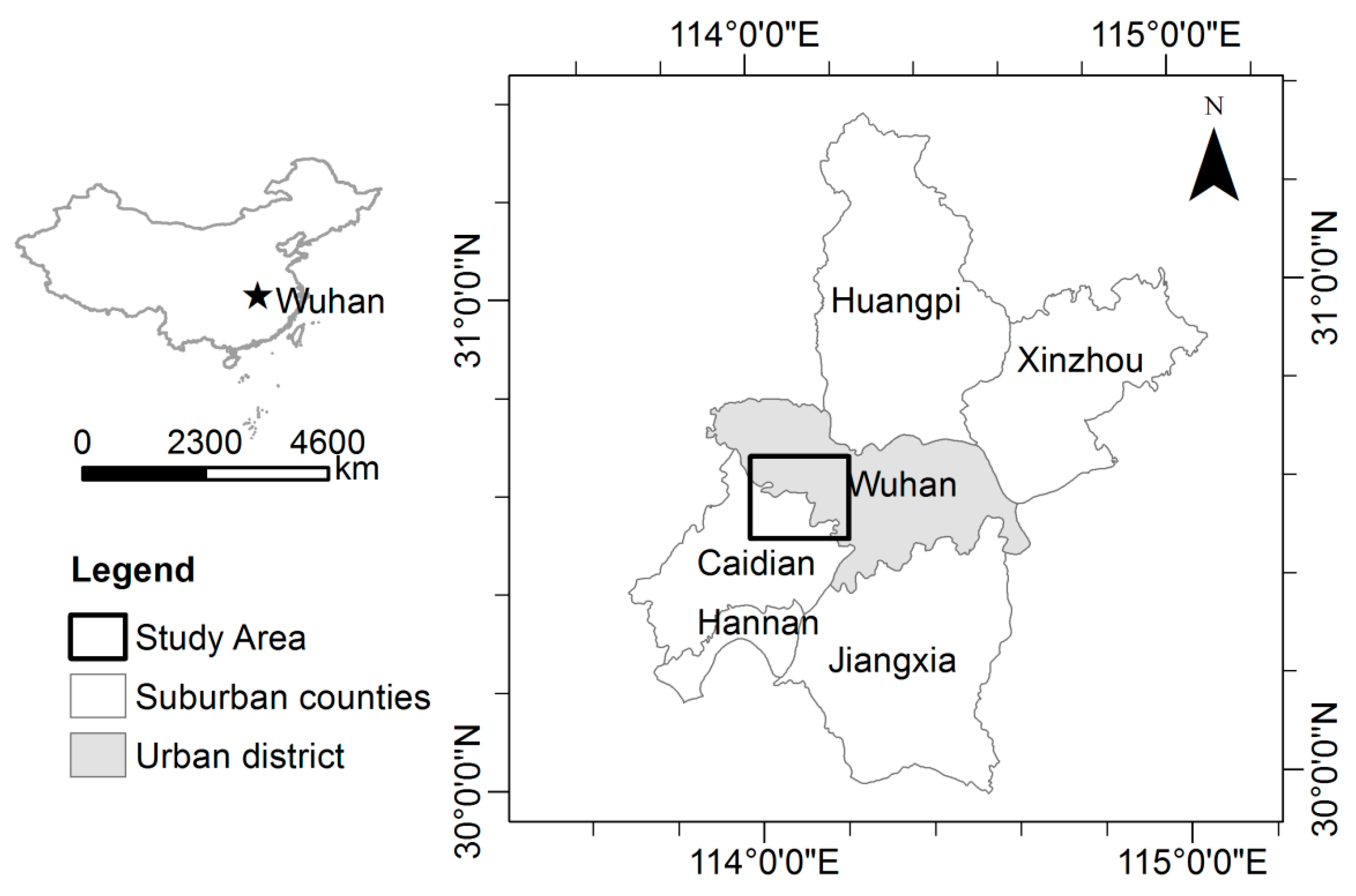
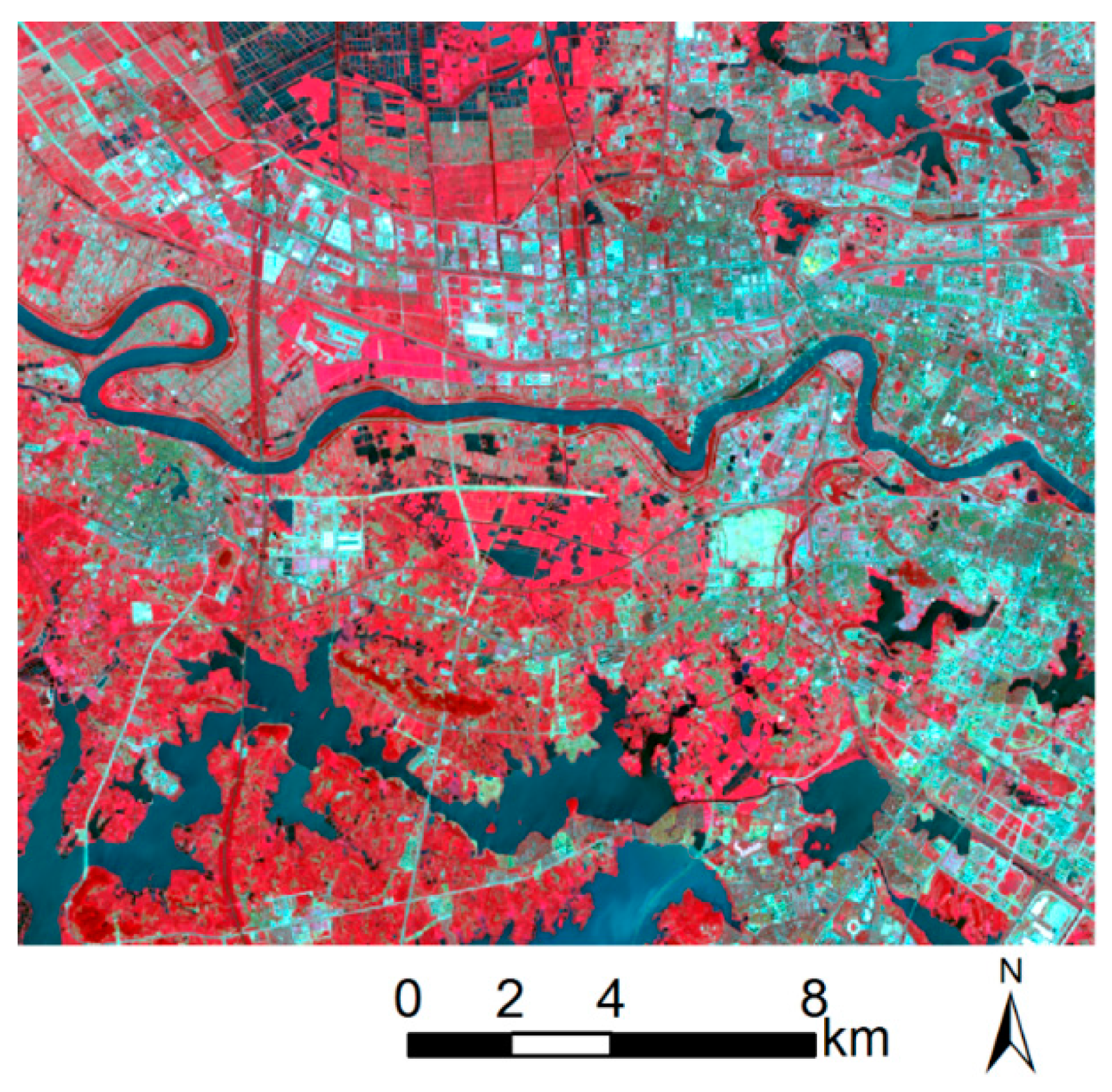
A study area covering the urban–rural transition zone located in the northwest of Wuhan was selected for this study (Figure 1) because it represents a range of typical urban fringe land cover types in China (built-up, woodland, bare farmland, green farmland, waterbody, and bare ground) with high inter-class similarities and intra-class heterogeneity. The complex land cover in this area provides sufficient variability and uncertainty to test the proposed algorithm. One cloud-free scene of Landsat-8 Operational Land Imager (OLI) data, acquired on 17 September 2013 (orbit number 123/39, image size 743 × 619 pixels), was chosen for our experiment (Figure 2). The image was registered to the Universal Transverse Mercator (UTM) projection using ENVI software based on 66 ground control points, which were collected from topological maps. The root-mean-square error of the registration process was less than one-third of a pixel.
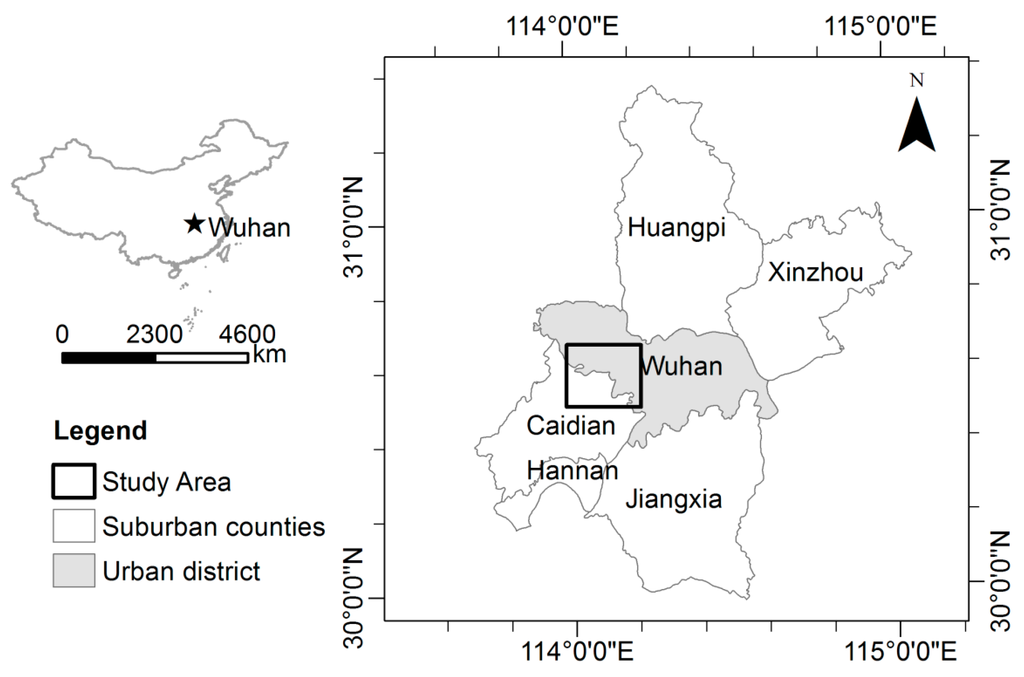
Figure 1.
Study area, located at a fringe of Wuhan.
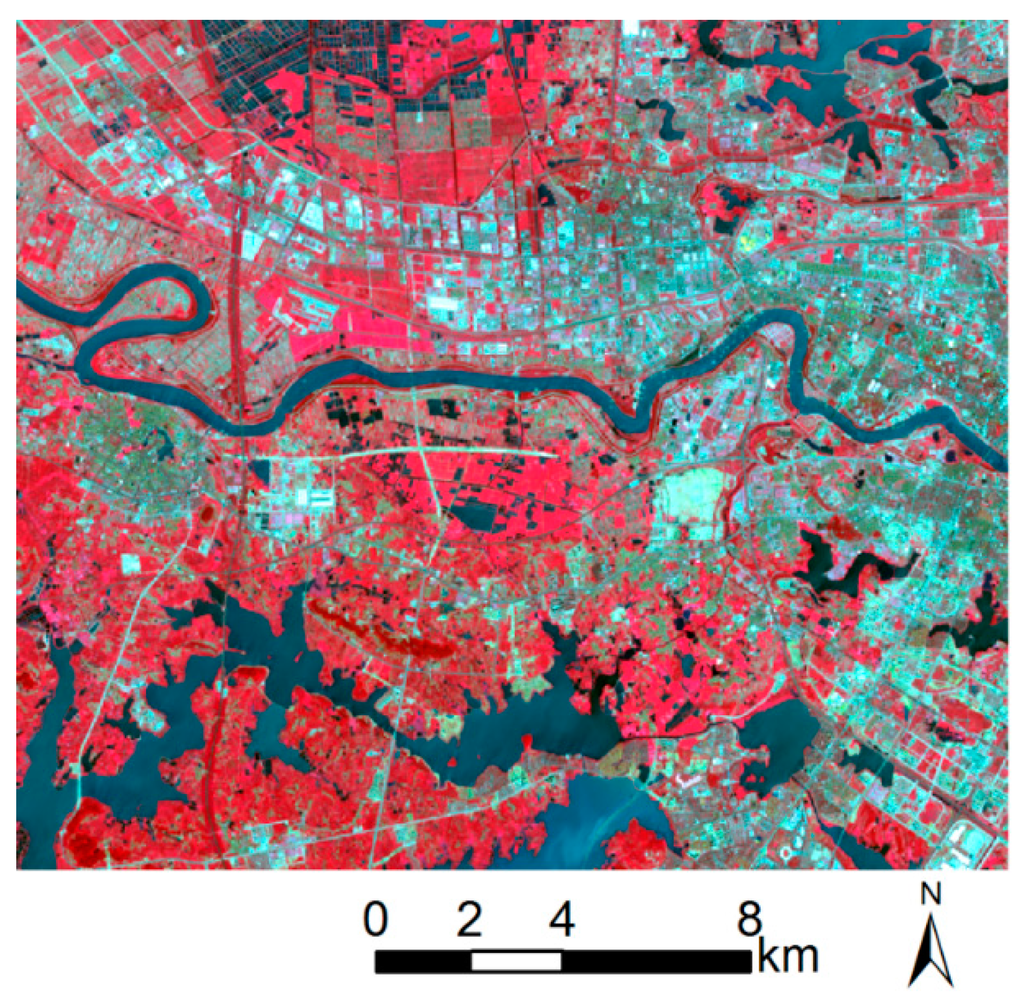
Figure 2.
Band 5 (R), 4 (G), 3 (B) composite of Landsat OLI image of study area.
3.2. Problem Formulation and Overview of Method
To integrate the fuzzy rough theory and the DS theory, the proposed urban fringe land cover classification approach first constructed a fuzzy rough set on remote-sensing imagery and reference data. The fuzzy rough theory was used to evaluate the spectral signatures and handle the uncertainty. Then the fuzzy rough set was interpreted to a DS theory-based evidential reasoning system. Final land cover classification and its related uncertainty were achieved by evidence reasoning.
To facilitate the description on methodology, a decision table of the form was used to represent the rough set-based classification system, where and were condition spectral signatures and final classes, respectively.
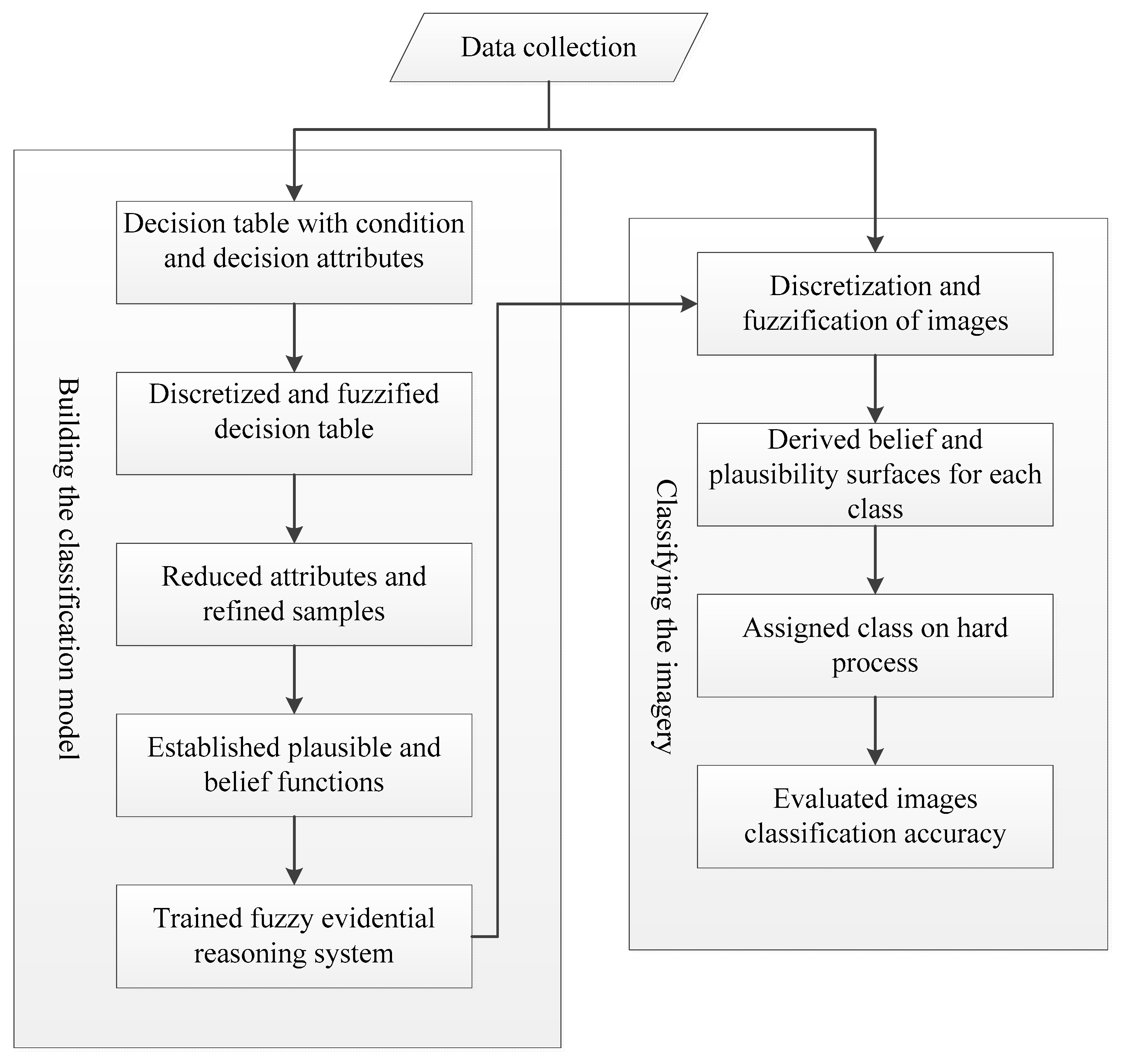
The logical flow of the urban fringe land cover classification is shown in Figure 3. The process can be divided into the following steps: (1) construction of a decision table-based on training samples of remote-sensing imagery; (2) use of a fuzzy discretization method to transform the continuum decision table to an interval-valued fuzzy decision table; (3) reduction of the attributes and refinement of the samples in the decision table; (4) derivation of the belief and plausibility functions from the fuzzy rough system for each attribute, and combining the reduced conditional attributes to establish an evidential reasoning system, and (5) classification of the remote-sensing imagery and accuracy evaluation.
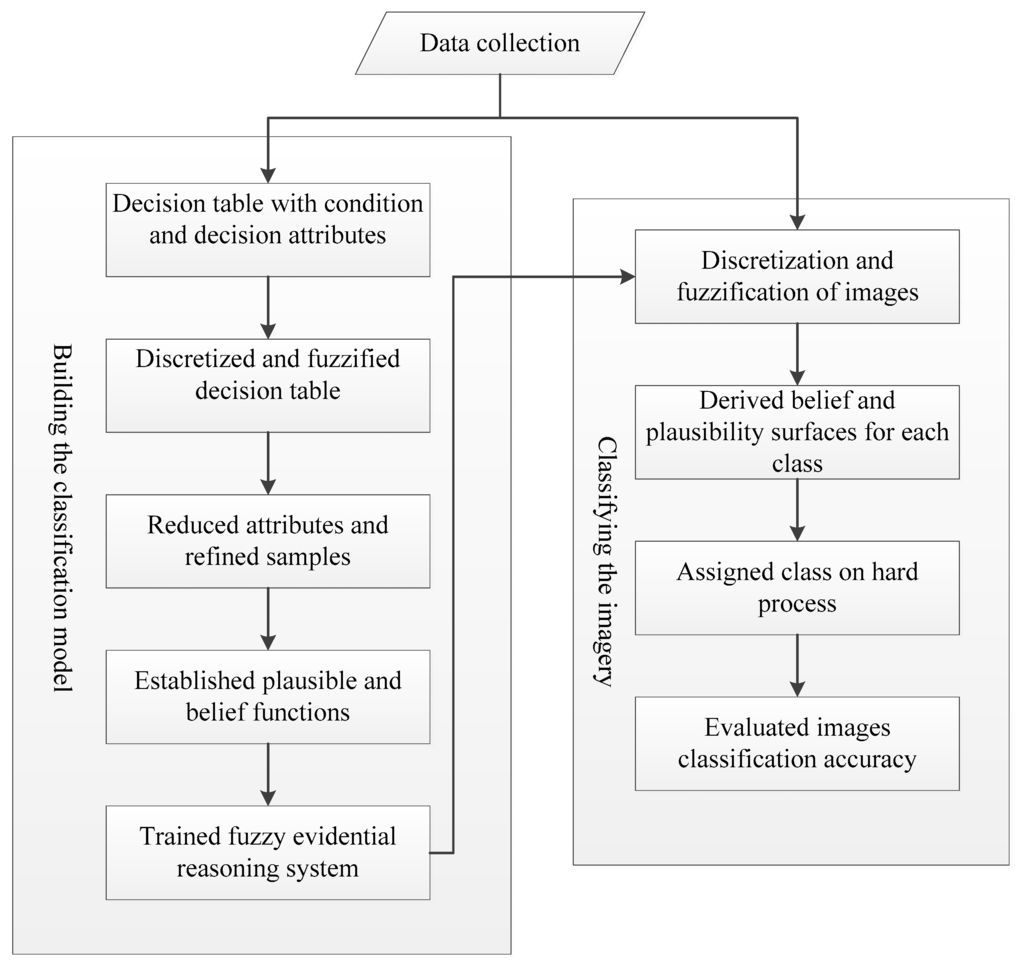
Figure 3.
Flow chart of proposed fuzzy rough set and evidential reasoning integrated classifier.
3.3. Decision Table Construction
The land cover classification scheme included six types: (1) built-up; (2) bare farmland; (3) green farmland; (4) bare ground; (5) woodland; and (6) waterbody. Spectral bands, Band Math, and image texture were used to construct the decision table. Eight spectral bands, i.e., coastal (Band 1), blue (Band 2), green (Band 3), red (Band 4), near-infrared (Band 5), cirrus (Band 9), and two mid-infrared (Bands 6 and 7), were selected as condition attributes. Based on the report by Xie et al. [22], the Band Math including band 3 + band 4, band 5 + band 6, band 3–band 5, band 4–band 7, band 2/band 4, and band 6/band 7 was selected to constitute condition attributes. The textural information for the eight selected bands was derived from a grey-level co-occurrence matrix mean measurement with 3 × 3 and 5 × 5 windows; there was therefore a total of 30 condition attributes in the initial decision table.
The aerial photography (spatial resolution 0.3 m), performed on 11 June 2013, was used to extract the training and test data. A dataset comprising 1486 pixels belonging to the six land cover classes was extracted from the Landsat OLI image by using a random individual point method (Table 1). The dataset was randomly split into two subsets: one subset (800) was for establishing the decision table, and the other (686) was for validation of the results. To set up a more accurate classification model, the training dataset was evaluated and refined from 800 to 730 samples. The training dataset is overlapped on the OLI image to get the decision attributes of the decision table.

Table 1.
Data acquired and studied in this research.
3.4. Attribute Discretization and Fuzzification
Discretization transforms integer-valued OLI image spectral bands and their continuum-valued derivations into a number of intervals; this is an important data pre-processing approach in rough set-based remote-sensing imagery classification. Many discretization methods have been developed, such as equal width, equal frequency, and entropy-based discretization. The arbitrary boundary is usually used in the discretization process; however, it leads to information loss. To precisely transform the original information in this study, a fuzzy discretization technique based on the class-attribute interdependence maximization (CAIM) algorithm [47] was used to discretize the continuous attributes to a format appropriate for an associated fuzzy rough system. The discretization was broken into two steps. First, the CAIM algorithm was chosen for supervised selecting truncation points for intervals. After determining the truncation points, the fuzzy intervals were defined for each attribute.
The fuzzification method reported by Kianmehr et al. [48] was used to fuzzy the intervals. Let be the set of centroids of the intervals for a condition attribute . For each interval, two variables are defined, and , which denote the average of the values less than and greater than the centroid of , respectively. The discrete intervals of , , are bounded by the pairs of numbers
and the membership function for fuzzy attributes can be given as:
For the first interval of attribute , bounded by ,
For the last interval of attribute , bounded by ,
For the rest of intervals of attribute ,
3.5. Attribute Reduction
In multispectral remote-sensing imagery-based land cover classification, spectral bands and their derived information such as texture may provide hundreds of features. However, not all of these features are helpful in the classification. The correlation between the features and irrelevant additional features may result in an inefficient data process, and introduce uncertainty in the classification. Rough set theory provides the function—attribute reduction—to refine the features in a decision system. In this study, an attribute-dependence measurement, denoted by , was used to select the most useful attributes for classification purposes [49]. In a fuzzy rough classification system, land cover classes depending on spectral signature attributes is defined by
denotes the positive region for land cover classes under condition spectral signatures, with membership functions defined by
Attribute reduction in the fuzzy decision table is described as follows.
Step 1. Input the discretized decision table and the error parameter .
Step 2. Let set , , and .
Step 3. Let set , and .
Step 4. For , if , then and .
Step 5. If , then go to step 3.
Step 6. Output .
3.6. Evidential Reasoning Based on Fuzzy Rough Set
According to Equation (6), the fuzzy rough set was interpreted to a DS theory-based evidential reasoning system. Based on Smets’s study on fuzzy-event-based condition belief and plausibility [50], the condition belief and plausibility of a land cover type on a spectral signature can be defined as
Combining all the condition values will give the total belief and plausibility of land cover type
For a DS theory-based imagery classification system, the combined total belief indicates the lower boundary of the support to a certain class, and the combined total plausibility indicates the upper boundary; and the range is referred to as an interval of uncertainty for the given conditions. The most popular decision criteria of the final class in a DS theory-based system are maximum plausibility, maximum belief, and maximum belief without overlapping [51]. In this study, the decision rule was based on the maximum plausibility, which was mentioned to be the best by some authors [52]. The range of was used to measure the uncertainty.
Let denote the reduced decision table, where for reduced condition attributes. Let denote the remote-sensing image to be classified, where denote the column and row number of an image pixel. The fuzzy rough set-based evidential reasoning algorithm is described as follows.
Step 1. Input-reduced decision table and the remote-sensing image .
Step 2. Let denote an interval of attribute . Calculate and values for all intervals of attributes based on training samples.
Step 3. Combine for and for :
and
where is the prior probability of the interval , and is the fuzzy membership of pixel , belonging to interval .
Step 4. Decide the classification of based on maximum belief plausibility.
Step 5. Output the classification and the uncertainty.
3.7. Accuracy Assessment and Comparison
Finally, the whole study area was classified using the trained model, and the test set in Table 1 was used to validate the classification. The results obtained using the proposed FRSER classifier were compared with those obtained using the classical maximum likelihood classifier (MLC), classical rough set classifier (RS), fuzzy rough set classifier (FRS), and variable precision fuzzy rough set classifier (VPFRS), to assess its efficiency in handling vagueness or uncertainty in classification. The RS, FRS, and VPRFS classifiers used in the experiment were set to have the same discretization and fuzzification processes as the FRSER classifier, in order to enable comparison of the results. The VPFRS classifier is an extension of the RS and FRS. Comparing to strict approximation in the RS and FRS, the VPRFS allows errors in classification. Due to the confusion of the spectral signature in a complex urban fringe environment, admission of some errors in training stage will help improve the discernibility. The precision parameter β in the VPFRS method was set at 0.23 to achieve the highest classification accuracy.
4. Results and Discussion
4.1. Comparison of Classification Accuracy
The total attribute number in the decision table was reduced from 30 to 21 to remove the confusion and redundancy in the spectral signatures. Comparing with the original dataset, the consistency of the reduced dataset is 0.9875 for the training set. Based on this consistency-preserving reduction, six spectral bands (Band 1, 3 and 5–8), four 3 × 3-window texture signatures (Band 1, 2, 4, and 6), five 5 × 5-window texture signatures (Band 3–5, 7 and 8) and all band math signatures were selected for the OLI imagery classification. The texture and band math signatures derived from the original spectral bands help to improve the discernibility of the land cover to some degree. The reduced decision table can unambiguously separate 97.12% pixels into classes of the training set, while eight spectral bands can only separate 92.47% of them.
The confusion matrices for the MLC, RS, FRS, VPRFS and proposed FRSER classifiers are shown in Table 2. Based on the overall accuracies and kappa coefficients, FRSER (overall accuracy 84.99%, kappa coefficient 0.81) gave better results than MLC (overall accuracy 72.89%, kappa coefficient 0.67), RS (overall accuracy 77.11%, kappa coefficient 0.70), and FRS (overall accuracy 79.59%, kappa coefficient 0.76), and similar results to VPRFS (overall accuracy 83.09%, kappa coefficient 0.80). All the rough set-based classifiers performed better than the classical MLC classifier. Extensions to the rough set, such as fuzzy and variable precisions, also improved the classification. The overall accuracies increased significantly from 77.11% for the RS classifier to 79.59 for the FRS classifier, and 83.09% the VPRFS classifier.
Table 2.
Confusion matrices obtained for test sets classified using MLC, RS, FRS, VPFRS, and FRSER.
In addition to the overall classification accuracies, the classification performance of each classifier with respect to individual classes is examined. There was an improvement in the accuracy for almost all individual classes using the proposed FRSER classifier compared with those using the MLC classifier. For the bare farmland, bare ground, green farmland, and woodland classes, the user’s and producer’s accuracies of the RS, FRS, and VPRFS classifiers were not stable, and some of them were even lower than that of the MLC. Because the signatures of these classes were similar, it was difficult to set up classification rules for them. However, the performance improved when fuzzification and variable precision processes were introduced into the rough set classifier. The individual class accuracies achieved with the FRS clarifier were significantly better than those obtained using the RS classifier, and the VPRFS gave better accuracies than the FRS classifier. The proposed FRSER classifier performed better than the VPRFS classifier for most individual class accuracies, except the producer’s accuracies for bare farmland and green farmland, and user’s accuracy for bare farmland. The producer’s accuracies for the built-up class were less than 85% for all classifiers. Because of the highly heterogeneous composition of the built-up class, it was easily misclassified to other classes such as bare ground, bare farmland, and waterbody.
4.2. Result Classification Using Fuzzy Rough Set and Evidential Reasoning (FRSER)
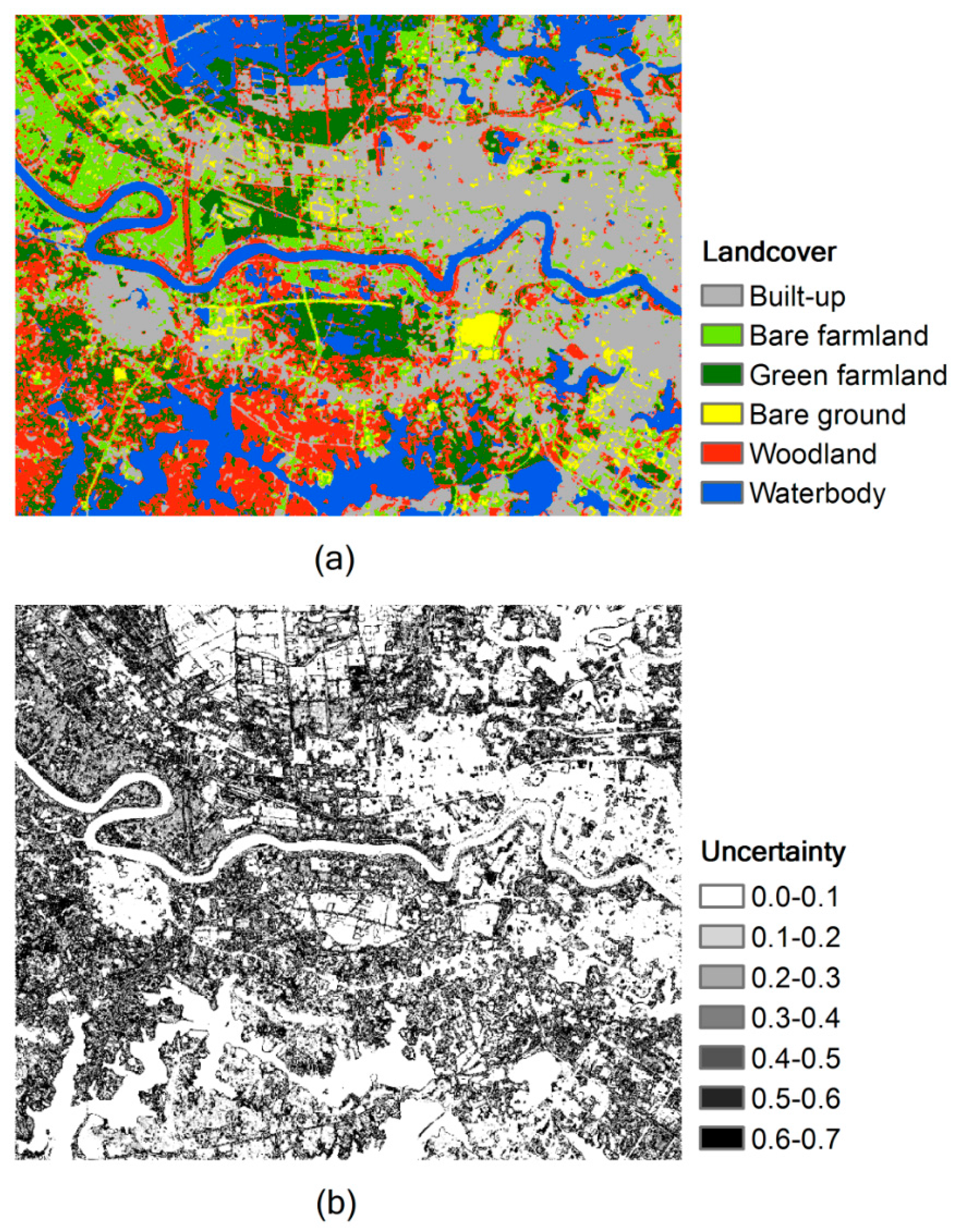
The proposed FRSER classifier was used to generate a land cover map from the OLI image using a decision rule based on maximum plausibility (Figure 4a). Figure 4b shows that the classification uncertainties ranged from 0.0 to 0.65. The pixels with uncertainties less than 0.1 were dominated by the waterbody land cover, which indicates that waterbody classification confidence was higher than those for the other classes using remote-sensing spectral characteristics in the study area. Over 90% of the pixels of the waterbody land cover had uncertainties less than 0.1. The built-up class also had low average uncertainties for most pixels: over 60% had uncertainties less than 0.1. A few built-up-type pixels had high uncertainties. One possible reason for these high uncertainties in built-up pixels is that built-up land cover showed high intra-class heterogeneity because of its complex composition. The pixels of the rest of the land cover types had high uncertainties, because of the similarities between the inter-class signatures of woodland and green farmland, and between those of bare farmland and bare ground. The uncertainties of the pixels from the woodland and green farmland classes were lower than those from the bare farmland and bare ground classes, because these two classes can be partly discriminated based on textural information.
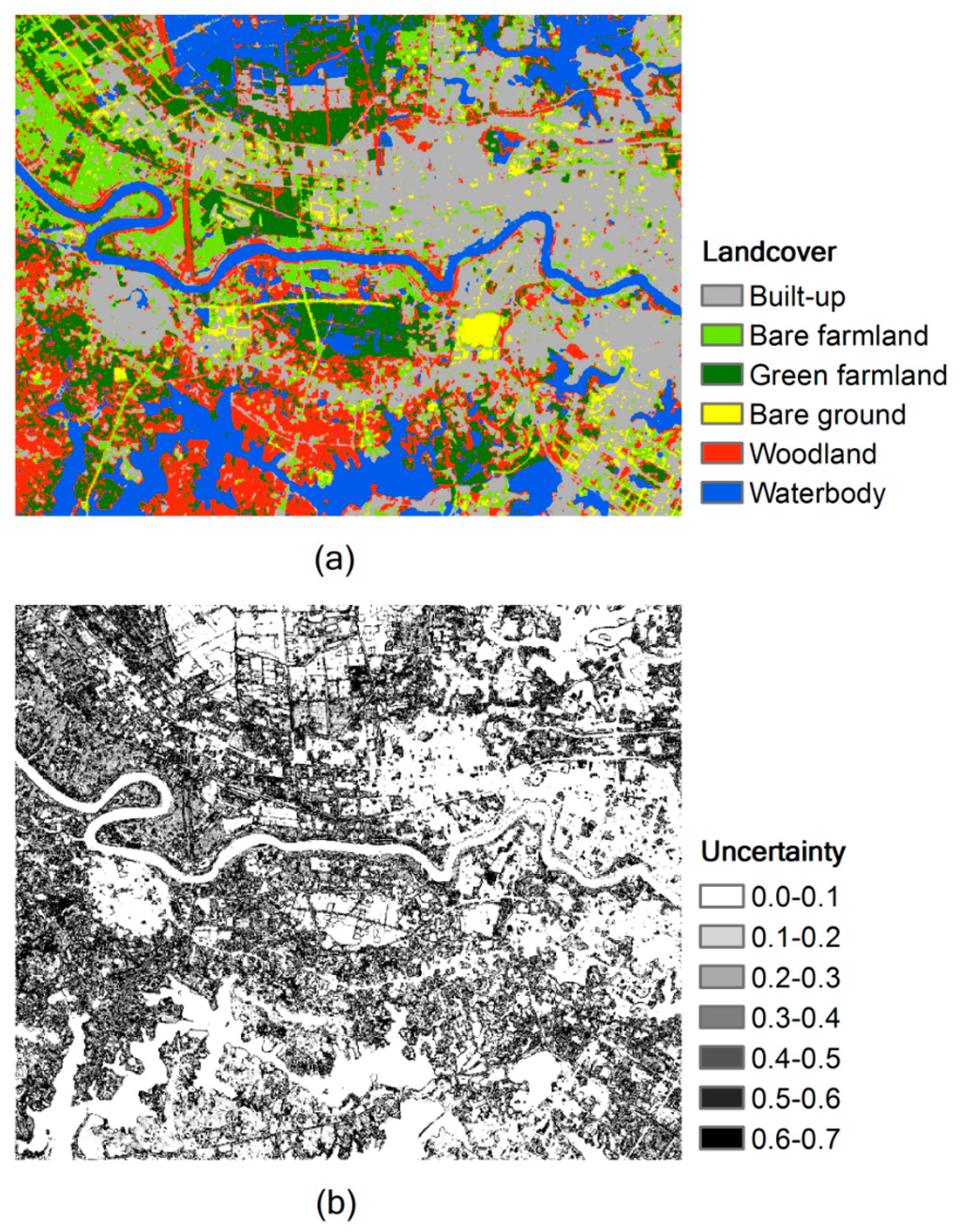
Figure 4.
Classification results: (a) land cover classification and (b) uncertainty classification.
The average uncertainties are 0.16, 0.40, 0.30, 0.39, 0.28 and 0.04 for built-up, bare farmland, green farmland, bare ground, woodland and waterbody types, respectively. There exists a close correlation between the average uncertainties and the training set-based accuracy assessments (Table 2). The high accuracy land cover types, waterbody and built-up, show low uncertainty degree in final land cover map, while low accuracy land cover types, such as bare ground and bare farmland, show high uncertainty degree. Since the uncertainties and training set-based accuracy assessments are separately derived from the original signatures of the pixels and the training set, both these two assessments can be used to represent the accuracy of the classification. The difference of these two assessments is that the uncertainty is for individual pixels in the image, while training set-based accuracy measure is only on classes.
4.3. Comparison of Land Cover Estimations
The estimated land cover areas obtained using the five classifiers are shown in Table 3. The proposed FRSER classifier avoided unclassified areas where the multispectral data were insufficient to assign a pixel to a certain category; the non-classified areas estimated using the RS, FRS, and VPRFS classifiers were 495; 1083; and 1470 ha, respectively. For the RS, FRS, VQRS, and proposed FRSER classifiers, the estimated bare farmland cover increased by 0.1%, 3.8%, 5.7%, and 11.2%, respectively, and the estimated green farmland cover increased by 11.7%, 13.2%, 13.3%, and 15.0%, respectively. In contrast, the estimated bare ground cover decreased by 10.7%, 5.7%, 4.8%, and 3.2%, respectively. There was no clear trend in the estimated built-up, waterbody, and woodland covers, and they remained relatively constant for these classifiers. Considering the poorly distinguishable class signatures of bare farmland and bare ground, and of green farmland and woodland, the estimated cover changes for these classes indicated difficulties in classifying their pixels. The changes in the estimated cover areas and corresponding classification accuracies in Table 3 show an increase in classification accuracies in the individual classes of bare farmland, bare ground, and green farmland. The MLC classifier also avoided unclassified cover using a decision rule of maximum a posteriori probability.
Table 3.
Estimated land cover areas obtained using MLC, RS, FRS, VPFRS, and FRSER.
4.4. Comparison of Overall Performance Characteristics
Based on the case study urban fringe area, the overall performance characteristics of the classifiers were compared (Table 4). The VPRFS and the proposed FRSER get the highest classification accuracy. The high accuracy, however, is at the cost of the more complex algorithm. FRS and VPRFS are extensions of the classical RS classifier, so they lead to the more accurate results. All rough set-based classifiers get higher accuracy than that of MLC. In this study, only the proposed FRSER provides the uncertainty measure of the classification, and only the VPRFS needs an extra error permission parameter for optimizing the algorithm. Besides the FRSER and MLC, all other rough set-based classifiers leave unclassified pixels.
Table 4.
Overall performance characteristics comparison of MLC, RS, FRS, VPFRS, and FRSER.
5. Discussion
The rule-induction-based classifiers RS, FRS, and VPRFS left unclassified samples in the urban fringe study area because of the restraints of the classification rules. A set of samples might not meet the requirements of the class rules, and were therefore left unclassified. The number of unclassified samples remaining in the test set for the RS, FRS, and VPRFS classifiers were 1, 15, and 7, respectively. A fuzzy rough set gave more unclassified samples than did a hard crisp rough set. The FRS and VPRFS classifiers preserved more accurate information as conditional attributes, which led to more rigorous rules; therefore, the number of samples that did not meet any of the rules increased. The classification results for the original image illustrate this point well (Table 2). The unclassified areas for the RS, FRS, and VPRFS classifiers represented 1.2%, 2.6%, and 3.6%, respectively. More accurate and rigorous rules led to more unclassified pixels.
A rough set provides a method for handling uncertainty in decision systems by using upper and lower approximations. However, a rough set is a rule induction system, and it leads to a large amount of unclassified pixels in remote-sensing image classification. In an urban fringe area, the inter-class similarities and intra-class heterogeneity of the class signatures make it difficult to set up rules to classify all pixels efficiently. In our study, the three rough set-based rule induction classifiers, RS, FRS, and VPRFS, all gave large unclassified areas, representing 1.2%, 2.6%, and 3.6% of the study area, respectively. Although FRS and VQRS performed better than RS in terms of overall accuracy and kappa coefficient, they left more unclassified areas. The fuzzification and variable precision processes preserve more detailed information than simple arbitrary discretization processes do. However, the more complicated and detailed information makes the rule decision system more complex. This improves the overall classification accuracy, but the rigorous classification rules lead to an increase in the number of unclassified pixels.
Integrating a rough set with other classifiers can avoid the large amount of unclassified pixels, and improve the classification accuracy. In these integrated classifiers, a rough set is usually used to structure other machine-learning classifiers such as neural networks. Although this type of integrated classifier might improve the overall accuracy, it is hard to tell to what degree the final results can be trusted, because the uncertainty handled in the rough set is not maintained in the final machine-learning classifiers. The uncertainty measure of the final classification of the pixels is particular important for urban fringe land cover extraction, since the complex landscape mosaics do not provide unambiguous spectral signatures to separate the pixels into classes. The greatest merit of the proposed classifier is its ability to handle the uncertainty from construction of the information system through to the final results. The equations in Section 2.3 show that a fuzzy rough set information system can be well interpreted as an evidential reasoning system based on the DS theory. The interpreted evidential reasoning system can also handle uncertainty using plausibility and belief functions. A soft classification based on plausibility and belief can be made, and a hard classification can be derived by applying a maximum rule to the soft one. The soft and hard classifications both come with uncertainty degrees represented by the range between belief and plausibility. The results of the experiment also show that the classification accuracy of the proposed classifier is greater than those of the rough set classifiers in an urban fringe environment.
The proposed FRSER classifier enables the incorporation of different sources of information for classification at different stages of the process. During construction of the decision table, except for the spectral bands and their derivations such as Band Math and textures, auxiliary geographic datasets including digital elevation models can be resampled to compatible raster bands and incorporated as conditional attributes in the decision table. During the evidential reasoning stage, the DS theory allows incorporation of non-geographic datasets, such as expert knowledge, into the classification process. Formal and well-documented expert knowledge can be directly added to the system using Equation (12). The proposed classifier therefore provides a flexible structure for incorporating different sources of information at different stages, and can be easily extended to a hybrid classifier. Considering the poor spectral signatures in urban fringe environment, the capability of combining different sources of information for classification is really an advantage of the proposed approach for urban fringe land cover classification.
The FRSER classifier is very sensitive to the training samples; therefore, these must be carefully evaluated. The plausibility and belief functions in the DS reasoning system are derived from upper and lower approximations of the rough set system, respectively. The upper and lower approximations are decided for each individual sample in the decision table using Equation (1) (which use the Inf and Sup operators). Therefore, a change in a single sample may result in drastic changes to the approximations. In our study, because of the complex land cover composition in urban fringe area, the spatial clustering characteristics of the class signatures had to be carefully studied, and samples on the margin were eliminated. The training dataset was finally refined from 800 to 730 samples.
6. Conclusions
In this study, the intrinsic inter-class similarities and intra-class variabilities in the urban fringe land cover classification were addressed using a classification framework based on the integration of a fuzzy rough set and Dempster–Shafer (DS)-based evidence reasoning. Compared with the maximum likelihood (MLC), rough set (RS), fuzzy rough set (FRS), and variable precision fuzzy rough set (VPRFS) classifiers, the proposed fuzzy rough set and evidential reasoning (FRSER) classifier leads to better discrimination of classes and thus an improvement in the overall classification accuracy in a complex urban fringe environment. Although there is no great improvement in the accuracy achieved with the FRSER classifier compared with those obtained using newly developed complex methods such as VPRFS, it has some merits. The uncertainty during data processing is well modeled by the FRSER classifier, and the degree of uncertainty in the final results reflects the classification confidence. The flexible structure of the proposed framework also makes it easy to extend and incorporate different sources of information to set up a hybrid classifier. However, the proposed method also has its drawbacks, e.g., it is very sensitive to the training samples. Besides the function for evaluating the attributes, rough set theory also provides the function for evaluating individual samples in the decision table. It provides the basis for selecting and refining the training samples to set up more appropriate spectral signatures in a complex urban fringe environment. Future work on the proposed FRSER classifier will focus on improving its robustness toward training samples.
Acknowledgments
The project was supported by the National Natural Science Foundation of China (No. 41201430). The authors thank the anonymous reviewers for their helpful comments about this article.
Author Contributions
Yetao Yang designed the research; Yetao Yang and Yi Wang performed the research; Yetao Yang, Yi Wang, Ke Wu and Xin Yu wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Nemmour, H.; Chibani, Y. Multiple support vector machines for land cover change detection: An application for mapping urban extensions. ISPRS J. Photogramm. Remote Sens. 2006, 61, 125–133. [Google Scholar] [CrossRef]
- Weng, Q. Remote sensing of impervious surfaces in the urban areas: Requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–49. [Google Scholar] [CrossRef]
- Zhang, R.; Zhu, D. Study of land cover classification based on knowledge rules using high-resolution remote sensing images. Expert Syst. Appl. 2011, 38, 3647–3652. [Google Scholar] [CrossRef]
- Guindon, B.; Zhang, Y.; Dillabaugh, C. Landsat urban mapping based on a combined spectral–spatial methodology. Remote Sens. Environ. 2004, 92, 218–232. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, B.; Wang, L.-M.; Wang, N. A self-trained semisupervised SVM approach to the remote sensing land cover classification. Comput. Geosci. 2013, 59, 98–107. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, Q.; Gong, J.; Wang, Y. An integrated spatio-temporal classification method for urban fringe change detection analysis. Int. J. Remote Sens. 2012, 33, 2516–2531. [Google Scholar] [CrossRef]
- Kavzoglu, T.; Colkesen, I. A kernel functions analysis for support vector machines for land cover classification. Int. J. Appl. Earth Obs. Geoinf. 2009, 11, 352–359. [Google Scholar] [CrossRef]
- Zhang, J.; Foody, G. A fuzzy classification of sub-urban land cover from remotely sensed imagery. Int. J. Remote Sens. 1998, 19, 2721–2738. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Friedl, M.A.; Brodley, C.E. Decision tree classification of land cover from remotely sensed data. Remote Sens. Environ. 1997, 61, 399–409. [Google Scholar] [CrossRef]
- Qiang, Y.; Lam, N.S. Modeling land use and land cover changes in a vulnerable coastal region using artificial neural networks and cellular automata. Environ. Monit. Assess. 2015, 187, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Pawlak, Z. Rough sets. Int. J. Comput. Inf. Sci. 1982, 11, 341–356. [Google Scholar] [CrossRef]
- Pawlak, Z. Rough Sets: Theoretical Aspects of Reasoning about Data; Springer: Dordrecht, The Netherlands, 1991. [Google Scholar]
- Pawlak, Z. Rough classification. Int. J. Man-Mach. Stud. 1984, 20, 469–483. [Google Scholar] [CrossRef]
- Pawlak, Z. Some issues on rough sets. In Transactions on Rough Sets I; Springer: Berlin, Germany; Heidelberg, Germany, 2004; pp. 1–58. [Google Scholar]
- Pal, S.K.; Mitra, P. Multispectral image segmentation using the rough-set-initialized em algorithm. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2495–2501. [Google Scholar] [CrossRef]
- Yun, O.; Ma, J. Land cover classification based on tolerant rough set. Int. J. Remote Sens. 2006, 27, 3041–3047. [Google Scholar] [CrossRef]
- Leung, Y.; Fung, T.; Mi, J.S.; Wu, W.Z. A rough set approach to the discovery of classification rules in spatial data. Int. J. Geogr. Inf. Sci. 2007, 21, 1033–1058. [Google Scholar] [CrossRef]
- Lei, T.; Wan, S.; Chou, T. The comparison of pca and discrete rough set for feature extraction of remote sensing image classification—A case study on rice classification, Taiwan. Comput. Geosci. 2008, 12, 1–14. [Google Scholar] [CrossRef]
- Pan, X.; Zhang, S.; Zhang, H.; Na, X.; Li, X. A variable precision rough set approach to the remote sensing land use/cover classification. Comput. Geosci. 2010, 36, 1466–1473. [Google Scholar] [CrossRef]
- Ge, Y.; Cao, F.; Duan, R. Impact of discretization methods on the rough set-based classification of remotely sensed images. Int. J. Digit. Earth 2011, 4, 330–346. [Google Scholar] [CrossRef]
- Xie, F.; Chen, D.; Meligrana, J.; Lin, Y.; Ren, W. Selecting key features for remote sensing classification by using decision-theoretic rough set model. Photogramm. Eng. Remote Sens. 2013, 79, 787–797. [Google Scholar] [CrossRef]
- Agrawal, A.; Kumar, N.; Radhakrishna, M. Multispectral image classification: A supervised neural computation approach based on rough–fuzzy membership function and weak fuzzy similarity relation. Int. J. Remote Sens. 2007, 28, 4597–4608. [Google Scholar] [CrossRef]
- Das, S.; Abraham, A.; Sarkar, S.K. A hybrid rough set—Particle swarm algorithm for image pixel classification. In Proceedings of the Sixth International Conference on Hybrid Intelligent Systems, Rio de Janeiro, Brazil, 13–15 December 2006; pp. 26–26.
- Liao, Y.; Wang, J.; Guo, Y.; Zheng, X. Risk assessment of human neural tube defects using a bayesian belief network. Stoch. Environ. Res. Risk Assess. 2010, 24, 93–100. [Google Scholar] [CrossRef]
- Wang, J.F.; Li, X.H.; Christakos, G.; Liao, Y.L.; Zhang, T.; Gu, X.; Zheng, X.Y. Geographical detectors-based health risk assessment and its application in the neural tube defects study of the Heshun region, China. Int. J. Geogr. Inf. Sci. 2010, 24, 107–127. [Google Scholar] [CrossRef]
- Du, Y.; Wen, W.; Cao, F.; Ji, M. A case-based reasoning approach for land use change prediction. Expert Syst. Appl. 2010, 37, 5745–5750. [Google Scholar] [CrossRef]
- Fischer, M.M.; Wang, J. Spatial Data Analysis: Models, Methods and Techniques; Springer-Verlag: Berlin, Germany; Heidelberg, Germany, 2011; p. 80. [Google Scholar]
- Cao, F.; Ge, Y.; Wang, J. Spatial data discretization methods for geocomputation. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 432–440. [Google Scholar] [CrossRef]
- Zhao, W.; Zhu, Y. Classifying email using variable precision rough set approach. In Rough Sets and Knowledge Technology; Springer: Berlin/Heidelberg, Germany, 2006; pp. 766–771. [Google Scholar]
- Pérez-Díaz, N.; Ruano-Ordás, D.; Méndez, J.R.; Gálvez, J.F.; Fdez-Riverola, F. Rough sets for spam filtering: Selecting appropriate decision rules for boundary e-mail classification. Appl. Soft Comput. 2012, 12, 3671–3682. [Google Scholar] [CrossRef]
- Rocchini, D.; Foody, G.M.; Nagendra, H.; Ricotta, C.; Anand, M.; He, K.S.; Amici, V.; Kleinschmit, B.; Förster, M.; Schmidtlein, S.; et al. Uncertainty in ecosystem mapping by remote sensing. Comput. Geosci. 2013, 50, 128–135. [Google Scholar] [CrossRef]
- Wu, W.-Z.; Mi, J.-S.; Zhang, W.-X. Generalized fuzzy rough sets. Inf. Sci. 2003, 151, 263–282. [Google Scholar] [CrossRef]
- Liu, B. Fuzzy rough theory. In Uncertainty Theory; Springer: Berlin, Germany; Heidelberg, Germany, 2004; pp. 349–367. [Google Scholar]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976; p. 297. [Google Scholar]
- Dempster, A.P. Upper and lower probabilities induced by a multivalued mapping. Ann. Math. Stat. 1967, 38, 325–339. [Google Scholar] [CrossRef]
- Soh, L.-K.; Tsatsoulis, C.; Gineris, D.; Bertoia, C. Arktos: An intelligent system for SAR sea ice image classification. IEEE Trans. Geosci. Remote Sens. 2004, 42, 229–248. [Google Scholar] [CrossRef]
- Sun, W.; Liang, S.; Xu, G.; Fang, H.; Dickinson, R. Mapping plant functional types from MODIS data using multisource evidential reasoning. Remote Sens. Environ. 2008, 112, 1010–1024. [Google Scholar] [CrossRef]
- Cayuela, L.; Golicher, J.; Rey, J.S.; Benayas, J.R. Classification of a complex landscape using dempster–shafer theory of evidence. Int. J. Remote Sens. 2006, 27, 1951–1971. [Google Scholar] [CrossRef]
- Cao, G.; Hou, P.; Jin, Y.-Q.; Mao, X. Fusion of features in multi-temporal sar imagery to detect changes in urban areas. Int. J. Remote Sens. 2009, 30, 5989–6001. [Google Scholar] [CrossRef]
- Ran, Y.; Li, X.; Lu, L.; Li, Z. Large-scale land cover mapping with the integration of multi-source information based on the dempster–shafer theory. Int. J. Geogr. Inf. Sci. 2012, 26, 169–191. [Google Scholar] [CrossRef]
- Dubois, D.; Prade, H. Rough fuzzy sets and fuzzy rough sets. Int. J. Gen. Syst. 1990, 17, 191–209. [Google Scholar] [CrossRef]
- Denœux, T. Modeling vague beliefs using fuzzy-valued belief structures. Fuzzy Sets Syst. 2000, 116, 167–199. [Google Scholar] [CrossRef]
- Sikder, I.U.; Gangopadhyay, A. Managing uncertainty in location services using rough set and evidence theory. Expert Syst. Appl. 2007, 32, 386–396. [Google Scholar] [CrossRef]
- Bello, R.; Verdegay, J.L. Rough sets in the soft computing environment. Inf. Sci. 2012, 212, 1–14. [Google Scholar] [CrossRef]
- Yao, Y.; Lingras, P. Interpretations of belief functions in the theory of rough sets. Inf. Sci. 1998, 104, 81–106. [Google Scholar] [CrossRef]
- Kurgan, L.; Cios, K.J. Caim discretization algorithm. IEEE Trans. Knowl. Data Eng. 2004, 16, 145–153. [Google Scholar] [CrossRef]
- Kianmehr, K.; Alshalalfa, M.; Alhajj, R. Fuzzy clustering-based discretization for gene expression classification. Knowl. Inf. Syst. 2010, 24, 441–465. [Google Scholar] [CrossRef]
- Shen, Q.; Jensen, R. Rough sets, their extensions and applications. Int. J. Autom. Comput. 2007, 4, 217–228. [Google Scholar] [CrossRef]
- Smets, P. The degree of belief in a fuzzy event. Inf. Sci. 1981, 25, 1–19. [Google Scholar] [CrossRef]
- Hégarat-Mascle, L.; Bloch, I.; Vidal-Madjar, D. Application of dempster-shafer evidence theory to unsupervised classification in multisource remote sensing. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1018–1031. [Google Scholar] [CrossRef]
- Barnett, J.A. Calculating dempster-shafer plausibility. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 599–602. [Google Scholar] [CrossRef] [Green Version]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).