1. Introduction
Surface all-wave net radiation (
Rn), characterizing the available radiative energy at the Earth’s surface that is usually called surface radiation budget, is the difference between total upward and total downward radiation. Mathematically,
Rn consists of four components:
where
Rns is the net shortwave radiation,
Rnl is the net longwave radiation,
Rsi is the incident shortwave radiation,
Rso is the reflected shortwave radiation calculated by
Rso = α*Rsi where
α is shortwave broadband albedo,
Rli is the downward longwave radiation, and
Rlo is the outgoing longwave radiation.
Rn drives the processes of evapotranspiration and air and soil heat fluxes, as well as other smaller energy-consuming processes such as photosynthesis [
1,
2].
Rn is a critical parameter to estimate evapotranspiration [
3,
4,
5]. The net surface radiation controls the energy and water exchanges between the biosphere and the atmosphere, and has major influences on the Earth’s weather and climate [
6,
7]. Thus, reliable spatial and temporal
Rn information is required for many applications. However, in spite of its importance, directly measured
Rn is available only from a very small number of standard radiometric observatories because of the expensive instrumentation and constant maintenance needed to guarantee that reliable measurements can be provided [
8]; these
in situ measurements are thus unable to characterize the spatial variation.
Alternative methods for obtaining
Rn are meteorological reanalysis and satellite remote sensing [
9].
Table 1 gives detailed information about the commonly used
Rn products. Reanalysis products are usually derived by merging available observations with an atmospheric model to obtain the best estimate of the states of the atmosphere and land surface [
10], while existing remote sensing products are generated mostly based on a radiative transfer model with inputted atmospheric and surface parameters. From
Table 1, we can see that the spatial resolutions of these products are too coarse for many land applications although they are temporally continuous and globally complete. Another issue is that the accuracies of these products vary considerably and may not meet the application requirements, such as the global change research [
9,
10,
11]. Therefore, a new long-time high-resolution global
Rn product with both high accuracy and fine temporal-spatial resolutions is urgently needed.
Many geostationary and polar-orbiting satellite data are at the kilometer spatial resolution and can be potentially used for estimating the individual components of Equation (1), such as incident shortwave radiation [
22] and albedo [
23,
24]. If all components in Equation (1) are known, the calculation of
Rn is straightforward [
25]. The difficulty in generating the global
Rn product using Equation (1) is the estimation of the thermal components under the cloudy conditions. This is the reason why many studies focus primarily only on shortwave [
26,
27,
28] or clear-sky conditions [
29]. If we know the exact atmospheric and surface properties, radiative transfer models enable us to calculate surface net radiation. However, it is extremely difficult to generate a complete set of atmosphere and surface products for model calculation at a high resolution. The most practical solution is to estimate incident shortwave radiation directly from satellite observations and then convert it into all-wave net radiation using either linear [
30,
31,
32,
33,
34] or nonlinear [
35,
36] models. Jiang
et al. [
37] recently developed two artificial neuron networks models using comprehensive global
in situ observations and found that the nonlinear models can produce better accuracy than the linear models.
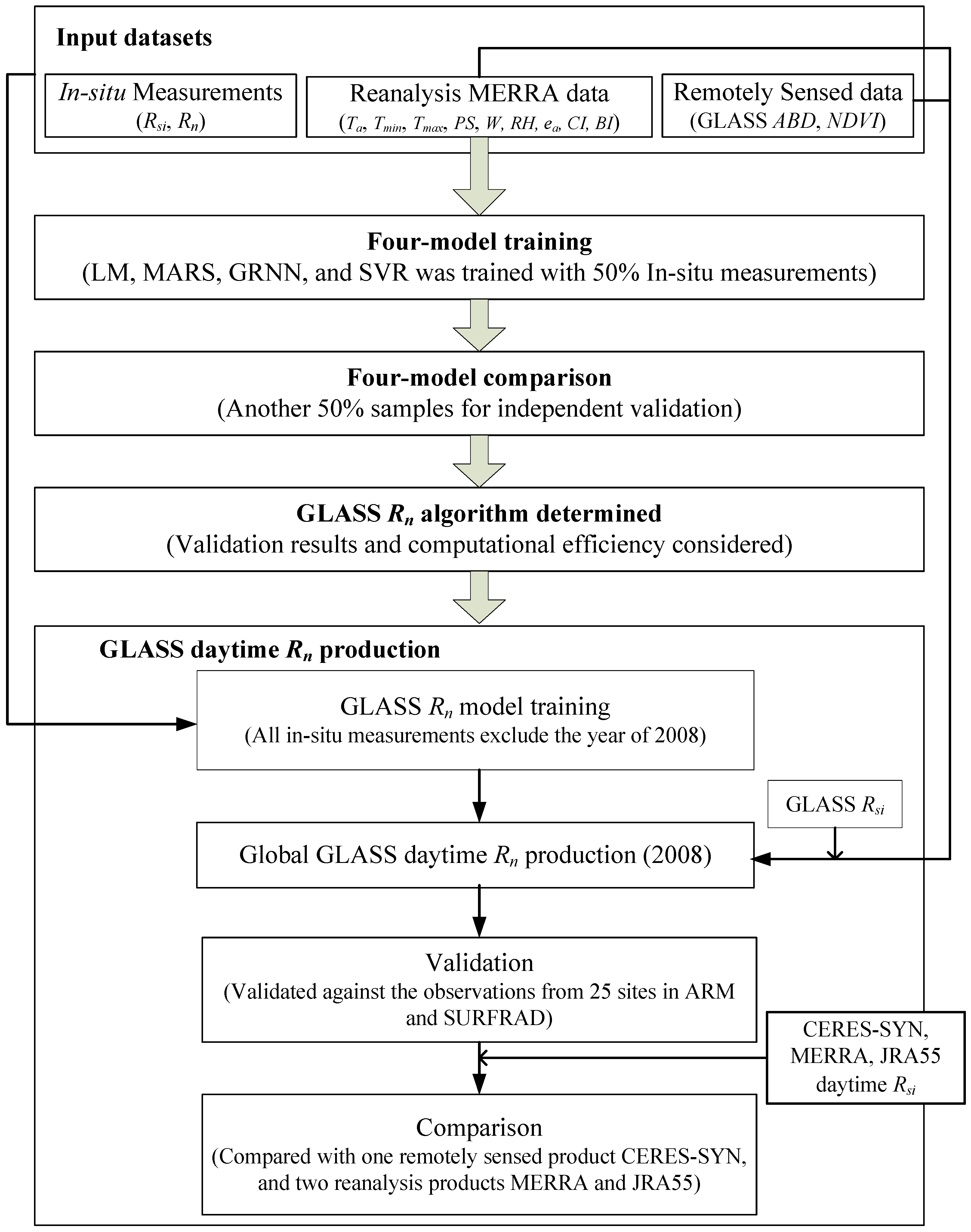
The primary objective of this study is to generate the accurate long-term high-resolution Global LAnd Surface Satellite (GLASS)
Rn product. The GLASS product suite is for the long-term environmental change studies [
38,
39] and continuously expanding. For generating such a global product, algorithm development is the key and we must therefore balance the accuracy and computational efficiency of the algorithm. To achieve this objective, we explore two new nonlinear models: Multivariate Adaptive Regression Splines (MARS) and Support Vector Regression (SVR). After comparing them with two models developed earlier [
17,
20], we select the MARS model to produce the GLASS
Rn product at a 5 km spatial resolution. The resulting high-resolution GLASS
Rn product is further validated, compared with one satellite product and two reanalysis products. The details are presented in the following sections.
3. GLASS Daytime Rn Algorithm
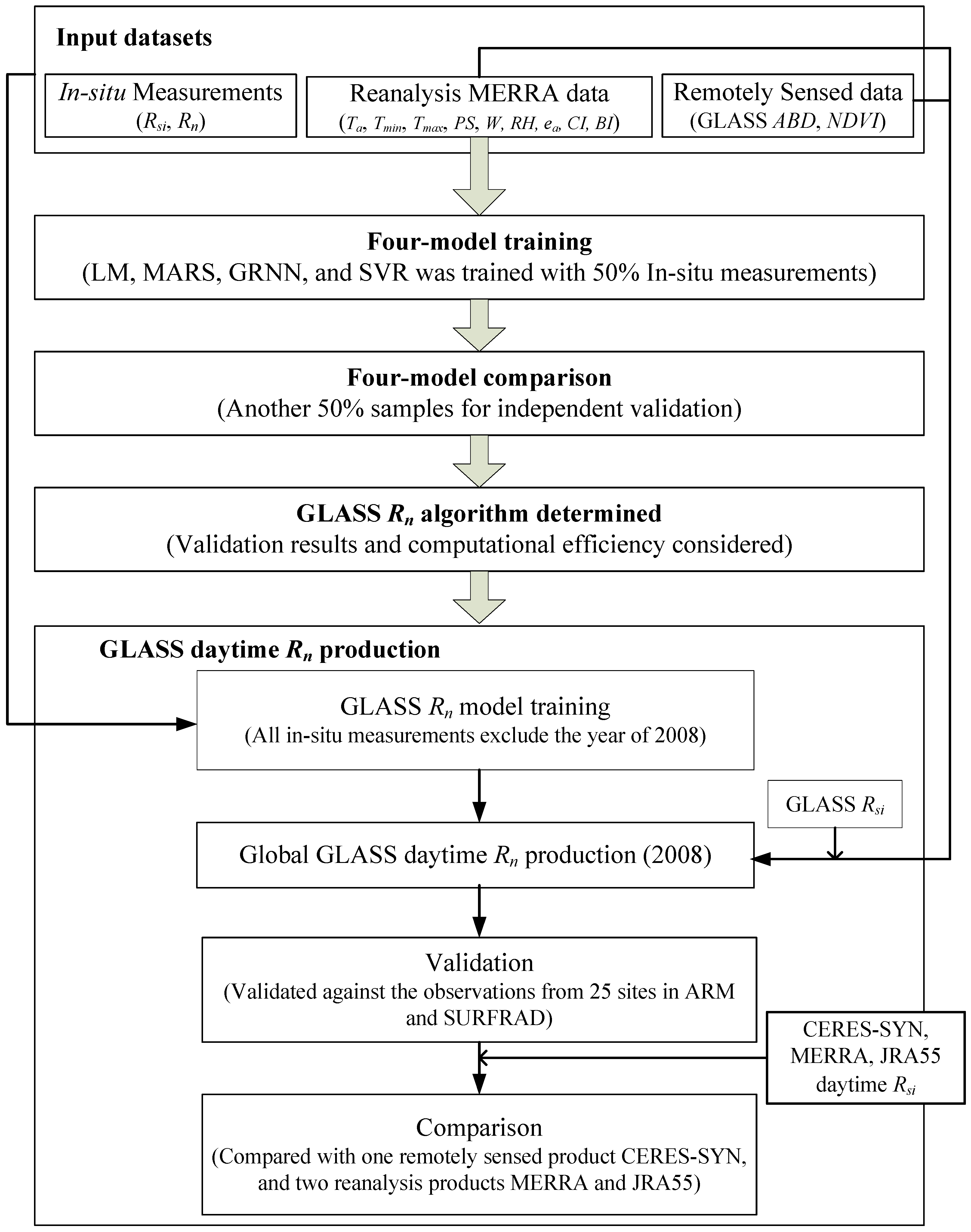
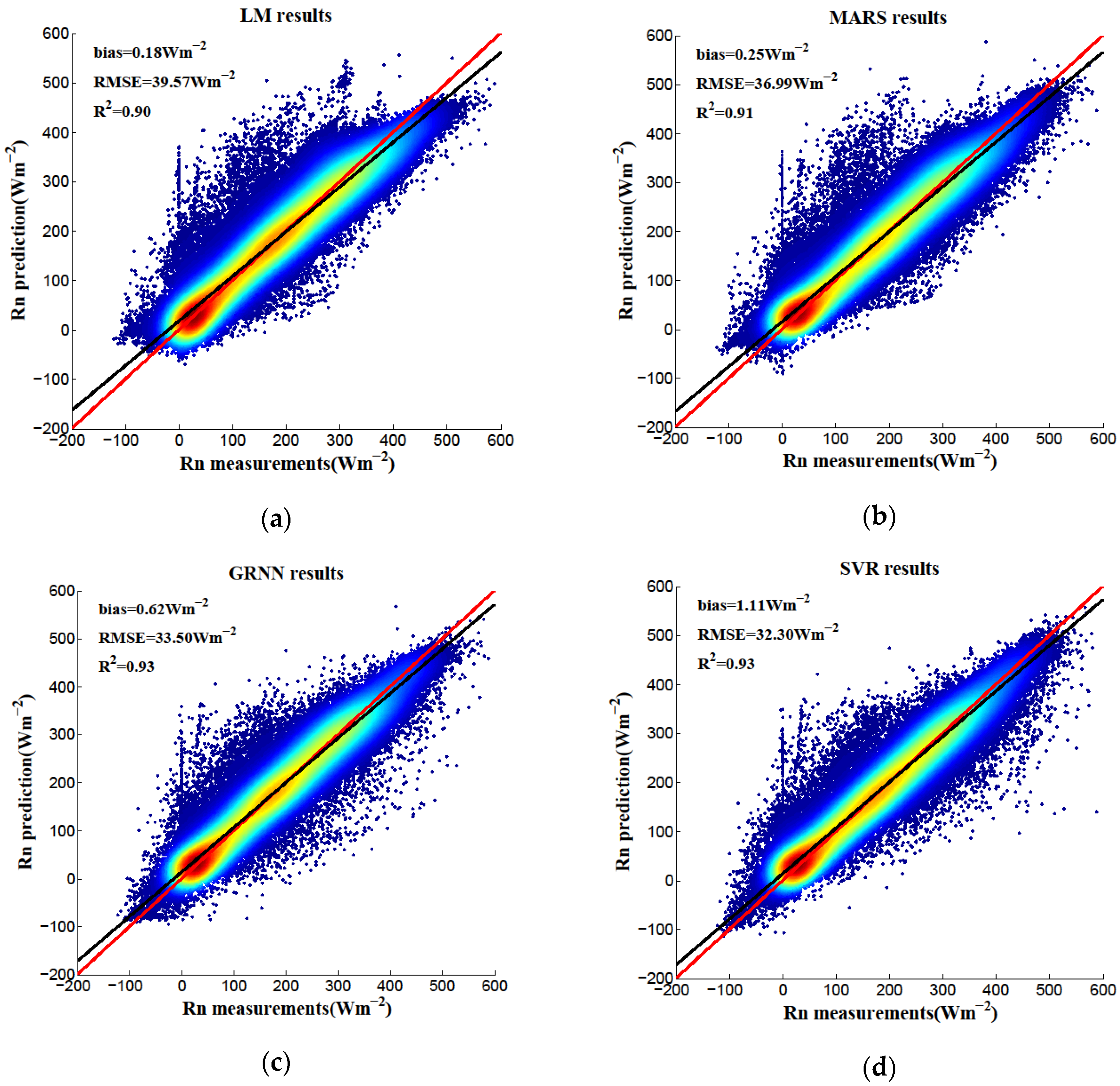
The four models (LM, MARS, GRNN, and SVR) were trained one by one with half of the total number of
in situ measurements and their corresponding reanalysis and satellite datasets (
Figure 2). Four predictions were then produced by the other part of the independent validation dataset and compared. The results are shown in
Figure 3 and summarized in
Table 4. Three measurements of the fitting statistics were compared: R-square (
R2), root mean square error (
RMSE), and bias. The computational times are also given in
Table 4 for better comparison. In the present study, all the models were implemented under the Microsoft Windows 7 system on a Intel Core 3.20 GHz PC with 8 GB memory.
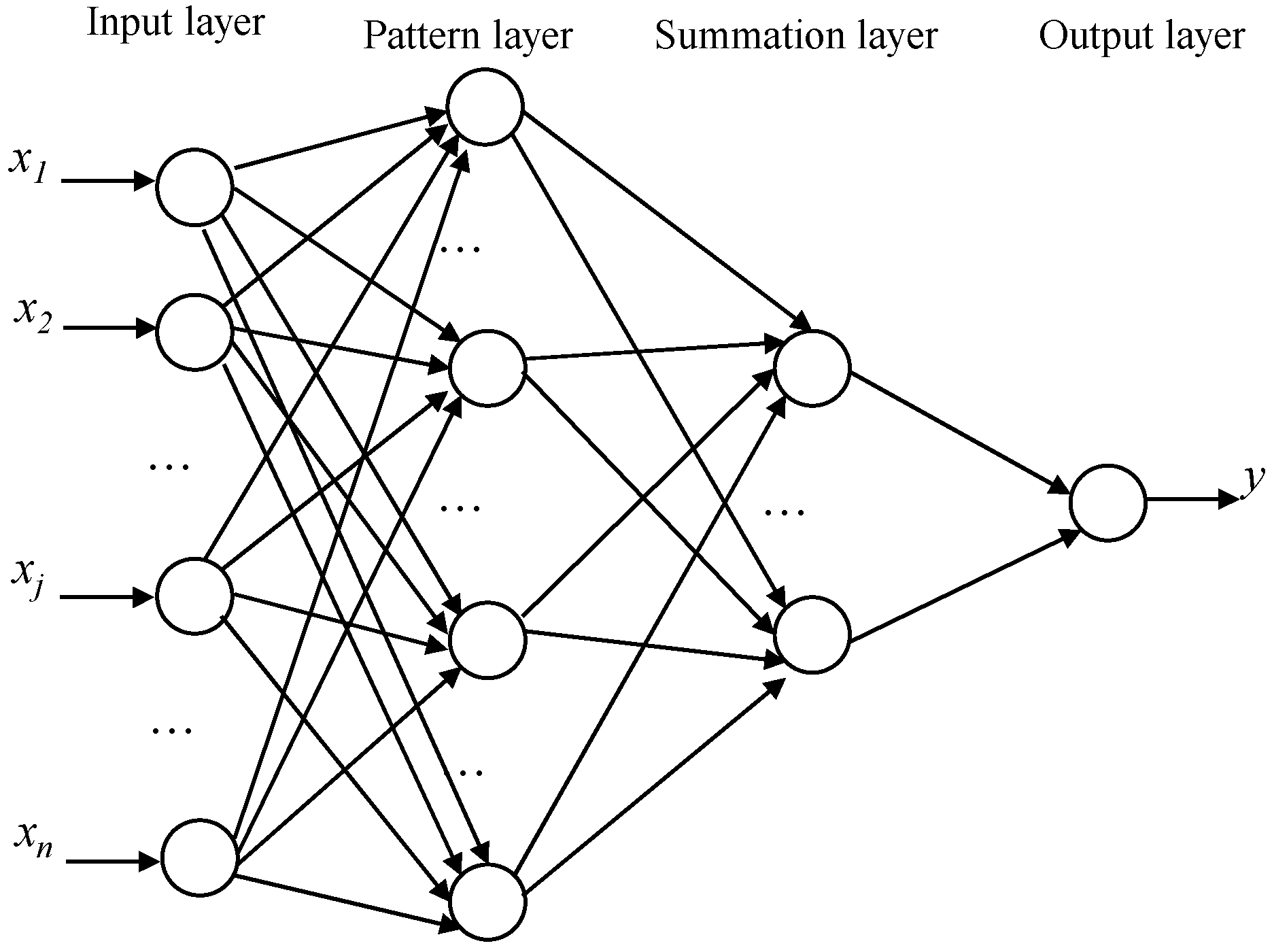
Based on these comparison results (mainly
R2 and RMSE values since the bias values are relatively small), it is clear that the predictive abilities of the GRNN and SVR models were similar and also better than those of the other two models. The LM model performed the worst and the MARS model’s performance was intermediate. However, the computational times for model training and fitting differed considerably between the four models (see
Table 4). In short, the computational efficiencies of the GRNN and SVR models were very low when large datasets were applied, and these two models are unsuitable for generating the long-term GLASS daytime
Rn product. Extensive experiments were then performed to determine if the sample sizes could be reduced without decreasing the data fitting accuracy using these two machine learning models. Taking the SVR model as an example, it was found that the fitting accuracy linearly decreased when the training samples were reduced in size (
Table 5), resulting in a data fitting accuracy very close to the result of the MARS model (
Table 4) when the time for training and fitting was acceptable. The situation for the GRNN model was similar. Given the trade-off between computational time and prediction accuracy, the MARS model was accepted as the first option for GLASS daytime
Rn production.
To achieve a better understanding of the applicability of the MARS model, all samples were grouped into four categories in accordance with Jiang
et al. [
43], and the prediction accuracy of the MARS model for these four categories was compared. Jiang
et al. [
43] found that NDVI = 0.2 can be used as the threshold to identify vegetated surfaces, and three more classes can be roughly divided based on albedo according to the different relations between
Rsi and
Rn when NDVI < 0.2 (see
Table 6). The comparison fitting results are shown in
Table 7. In general, the four categories correspond to the major land cover types found on Earth: S1–wetland; S2–desert or barren land with sparse vegetation; S3–snow/ice; and S4–the remaining vegetated surfaces. Furthermore, the seasonal information can also be represented by these categories. The results shown here were similar to our previous study [
43] whereby the simulation accuracies are much better for S1 and S4, because the
Rsi is the dominant factor for
Rn for these two categories. Keep in mind that the statistical values are considerably different for snow/ice surfaces (S3) due to the high albedo and clustering of all points. The results proved the robustness of the MARS model in
Rn estimation.
5. Summary
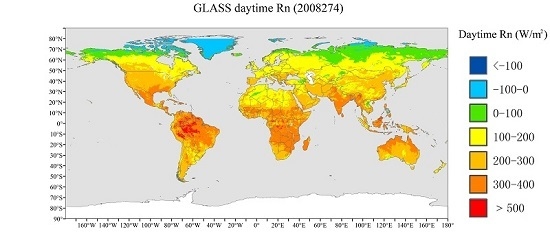
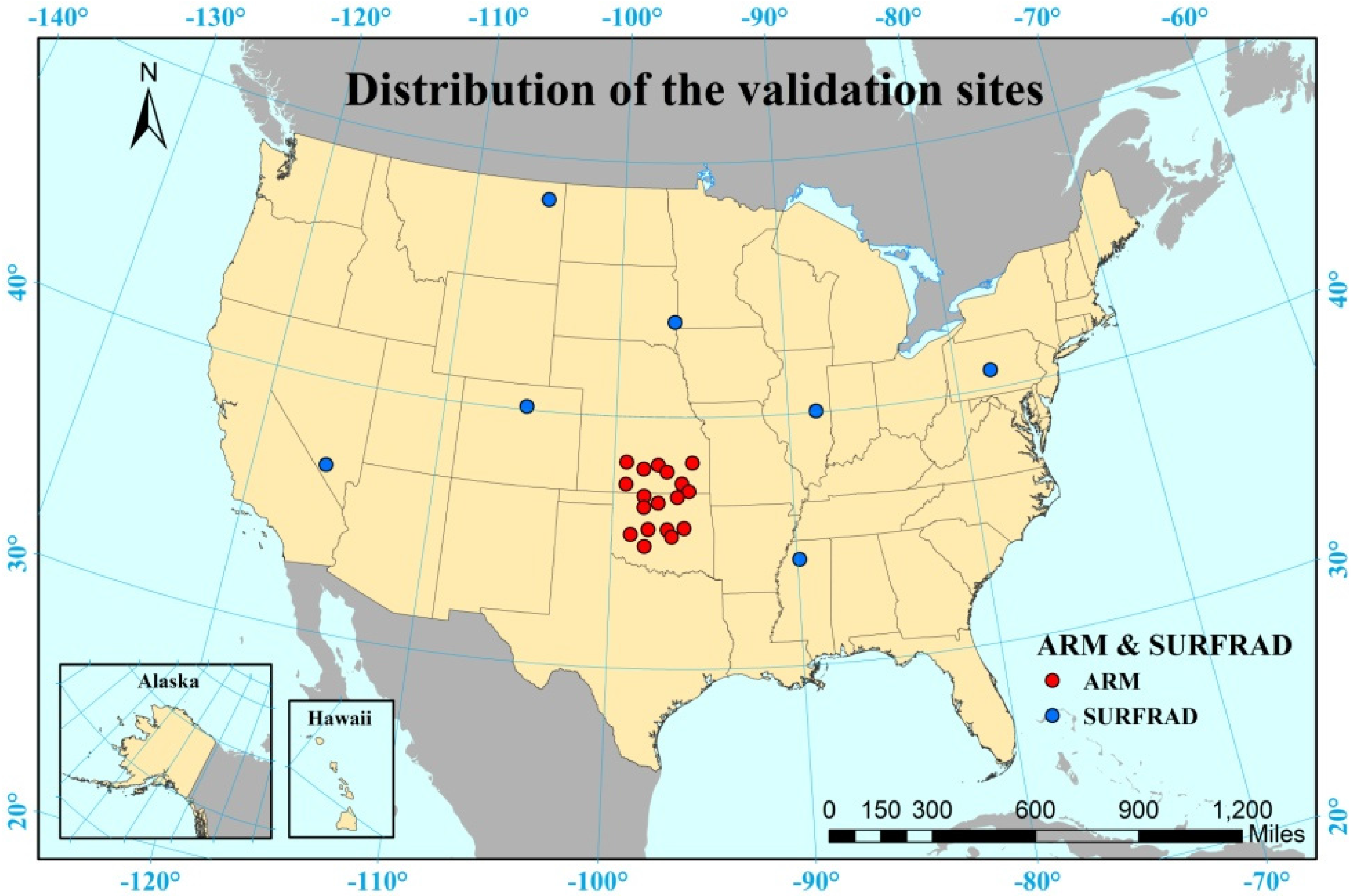
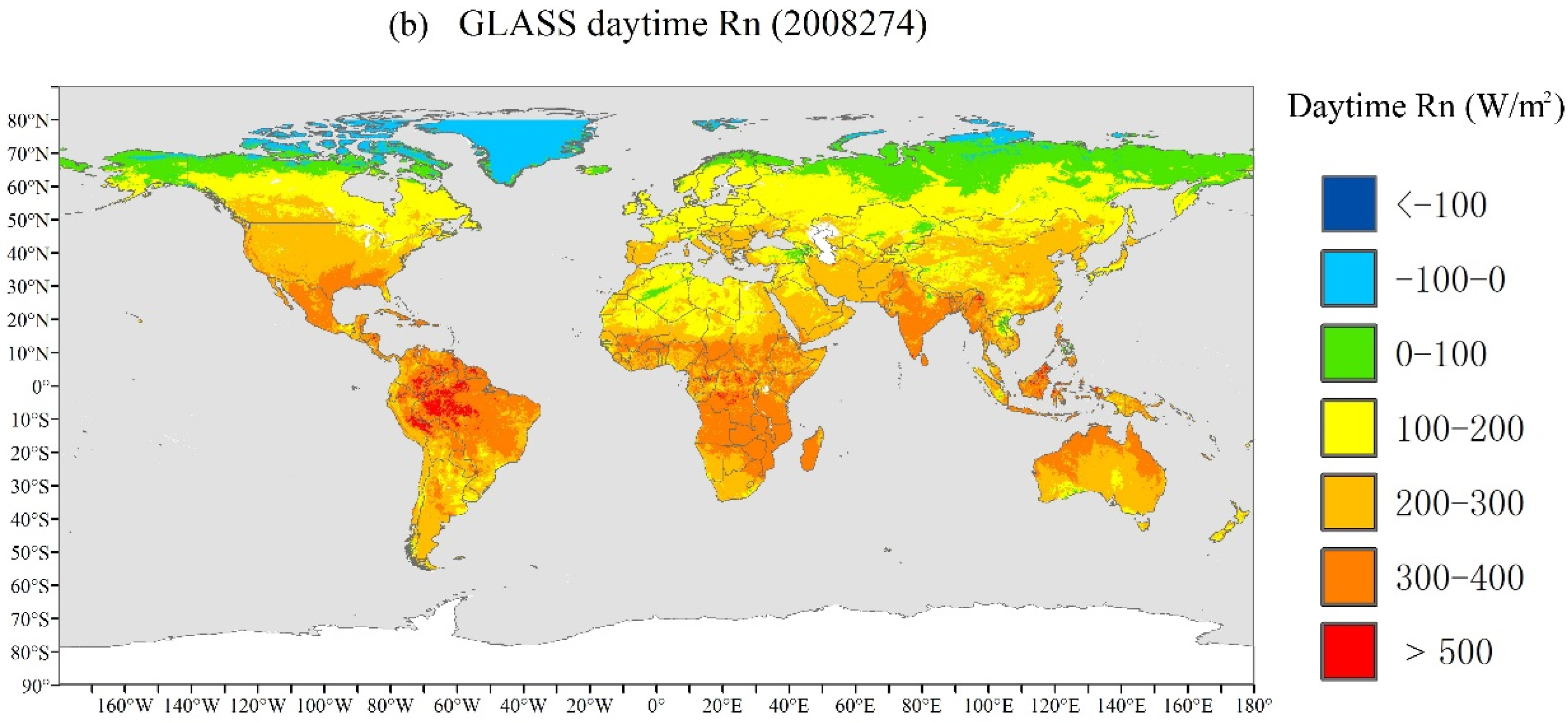
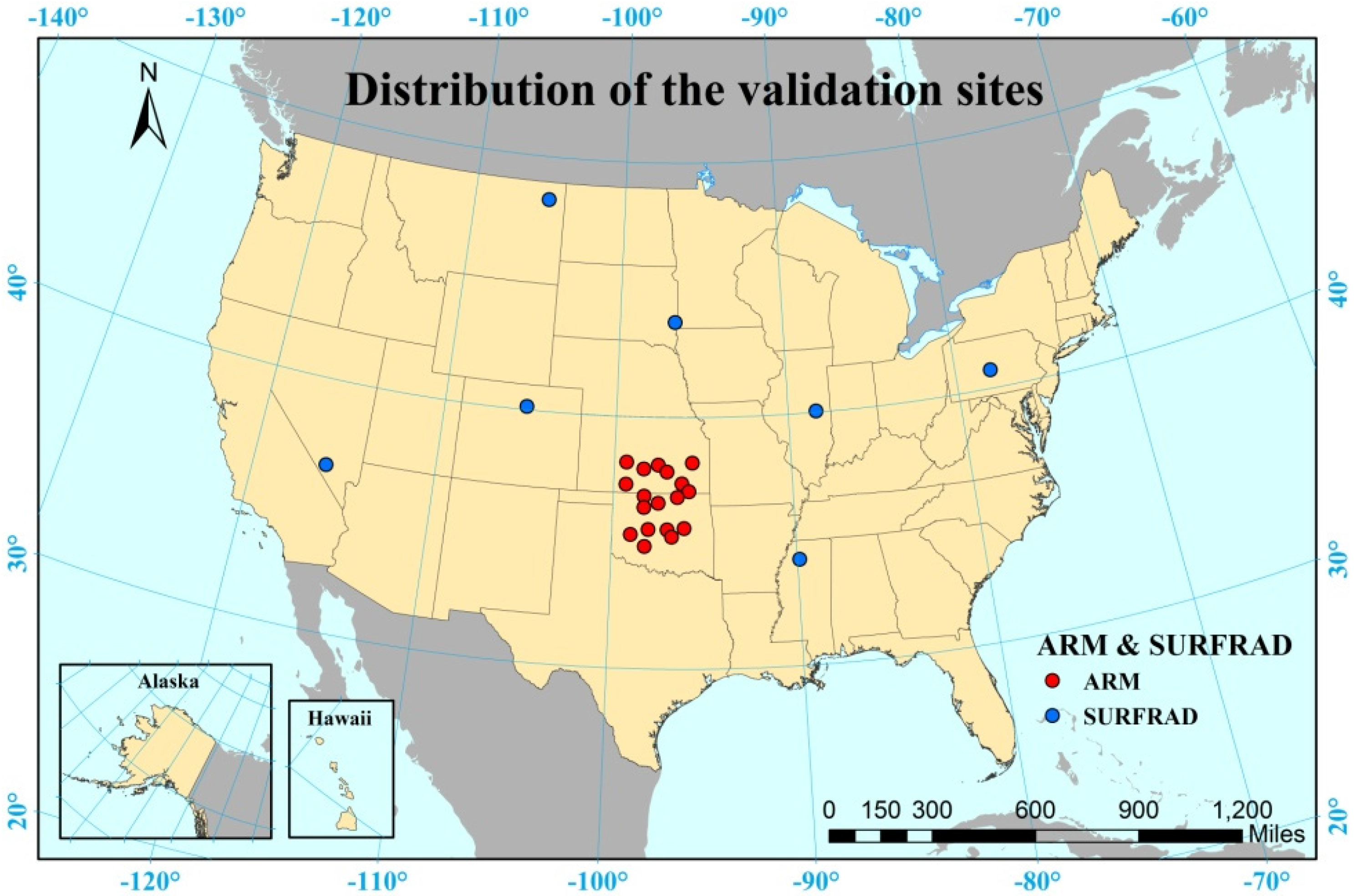
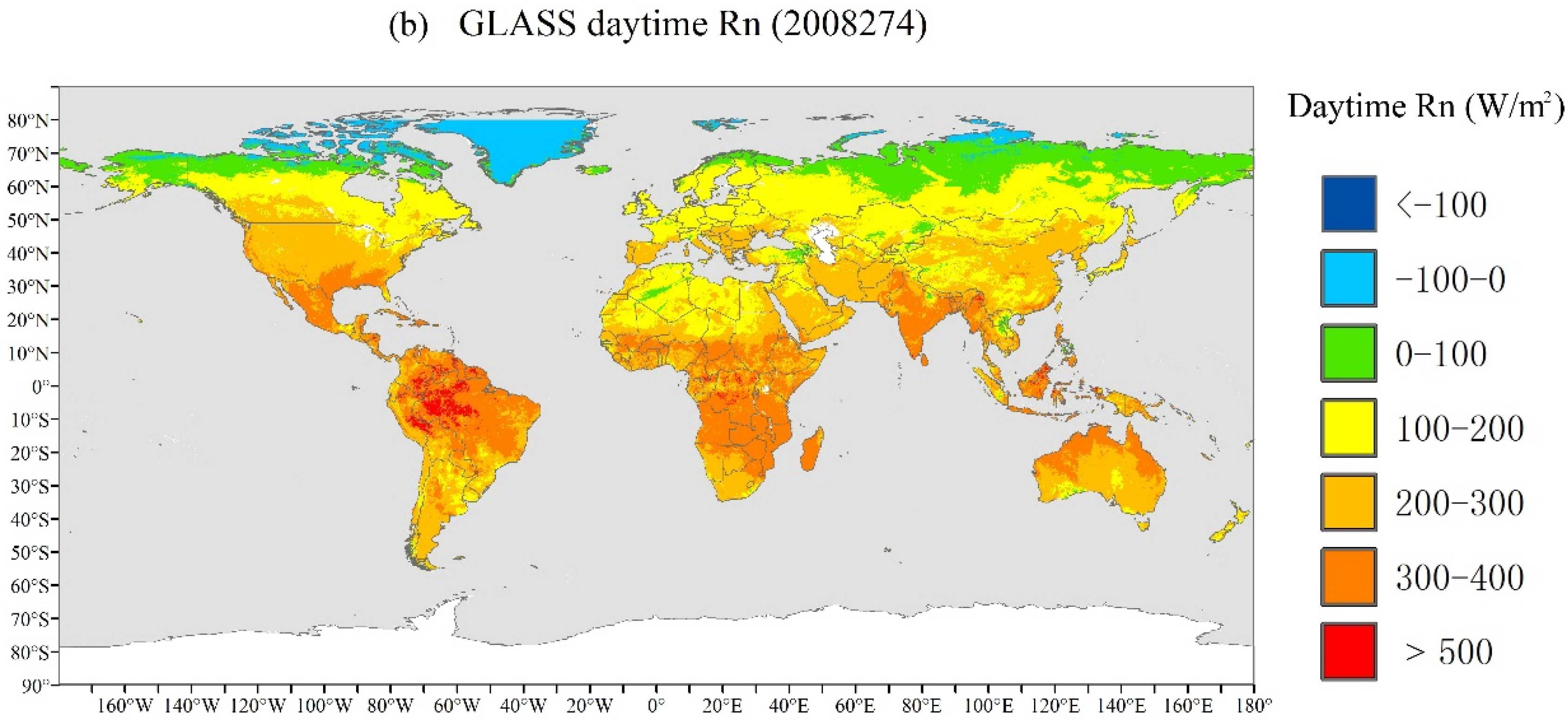
A new Rn product that offers high spatiotemporal resolution, high accuracy, and global coverage over long time periods is urgently needed for a variety of applications. To achieve this goal, we developed the GLASS daytime Rn product. To determine the GLASS daytime Rn production algorithm, four models (LM, MARS, GRNN, and SVR) that convert incident shortwave radiation to all-wave net radiation were trained for Rn estimation and validated with high-quality measurements made in the United States. The validation results indicate that the GRNN and SVR models had the best prediction accuracy over the other two empirical models, although it was unacceptably time consuming, and that the performance of the MARS model is promising. A further experiment also demonstrated that the MARS model is robust under various conditions. Therefore, as a result of the trade-off between the practical requirements of applications and data fitting accuracy requirements, the MARS model was selected as the final GLASS daytime Rn product algorithm. Finally, a global coverage GLASS daytime Rn product with a 5 km spatial resolution and daytime temporal resolution in 2008 was generated using the MARS model.
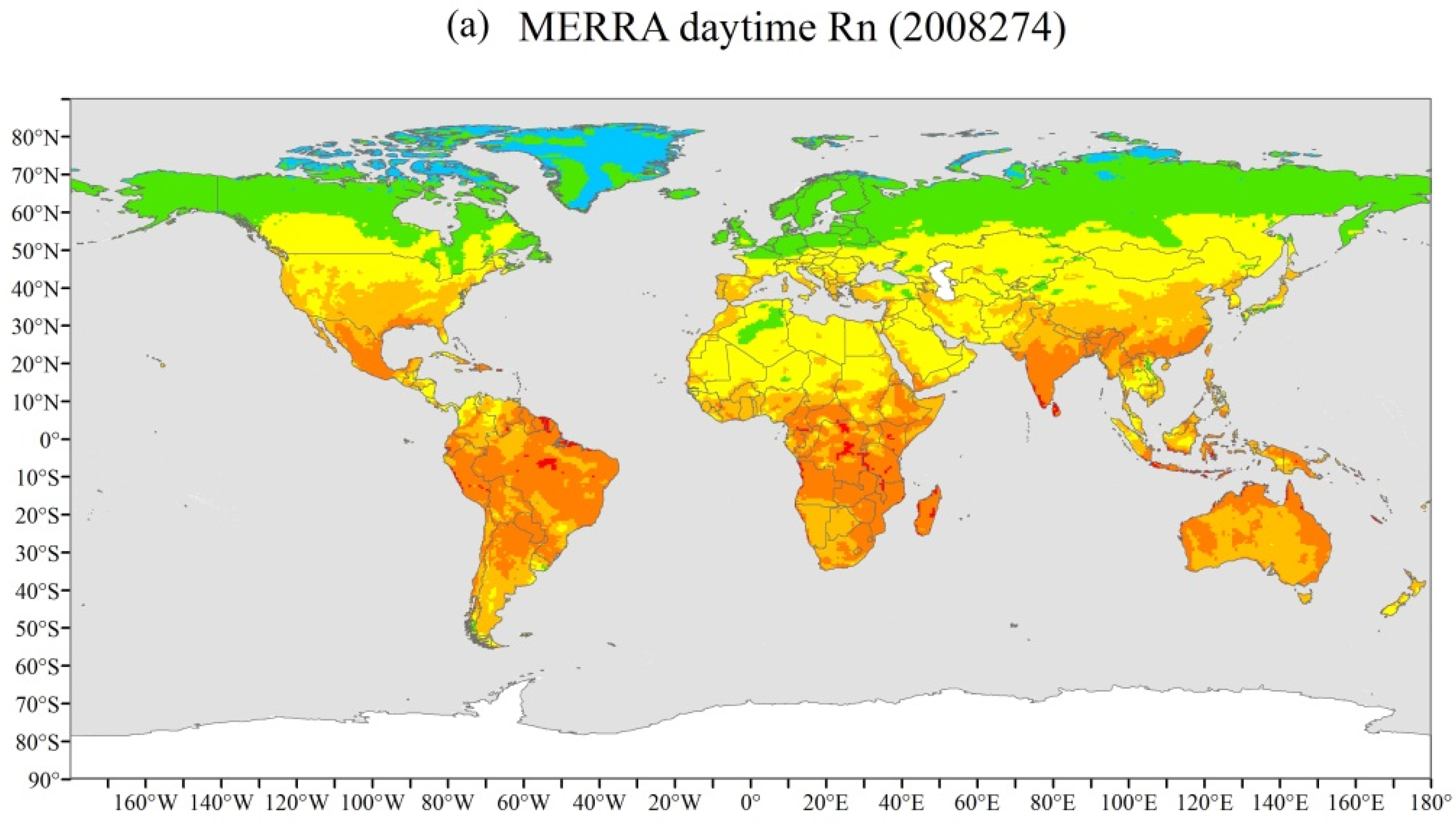
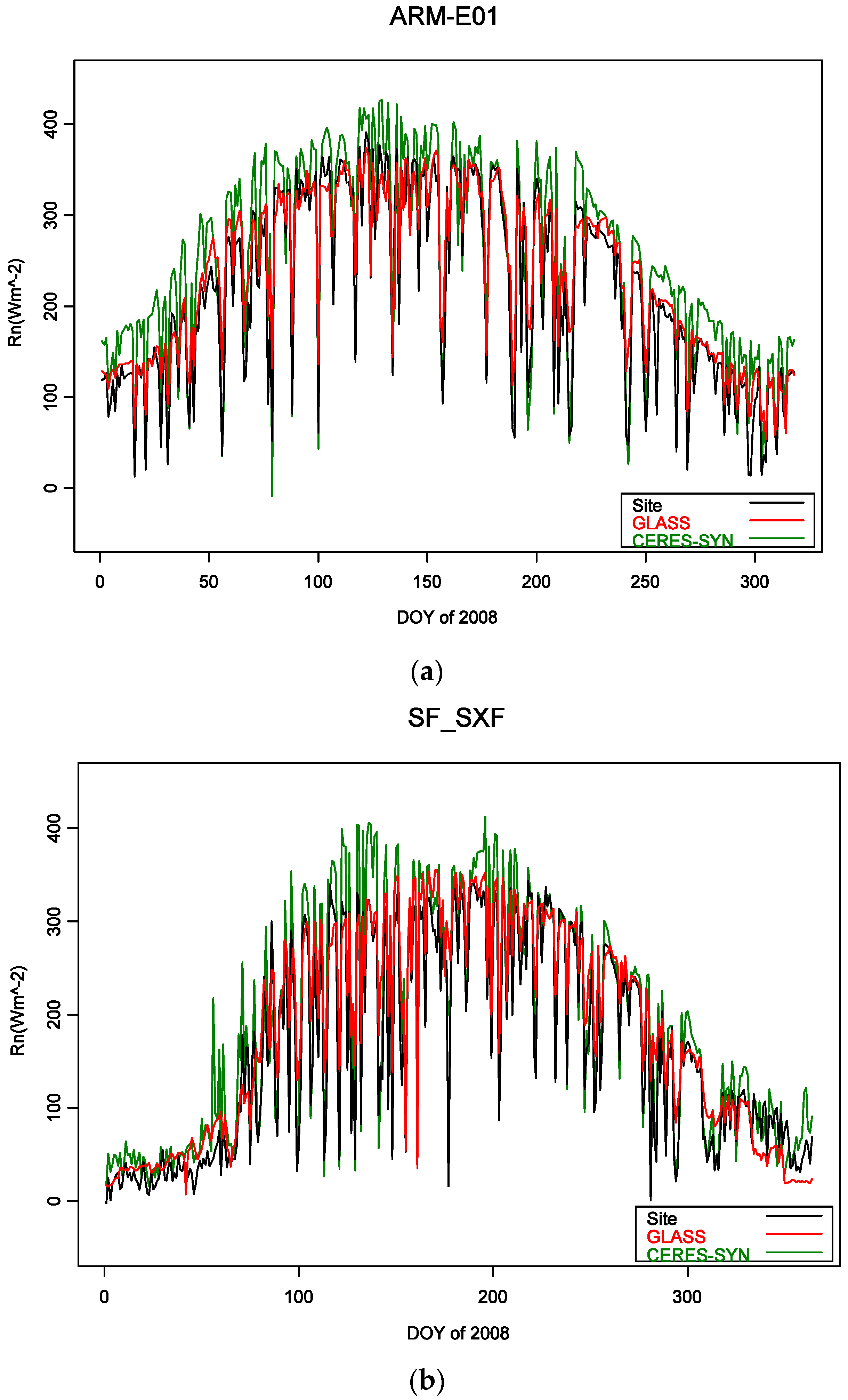
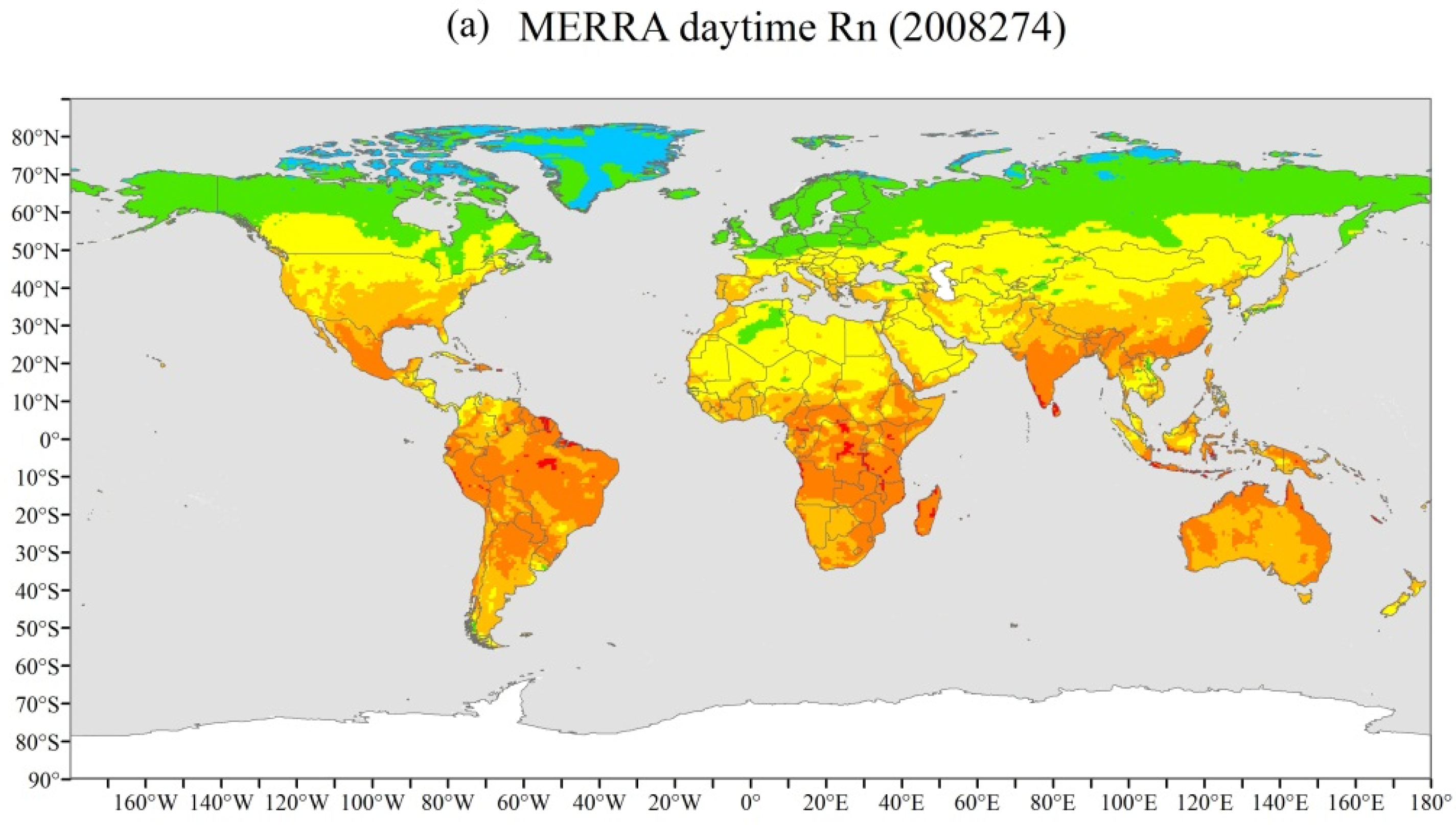
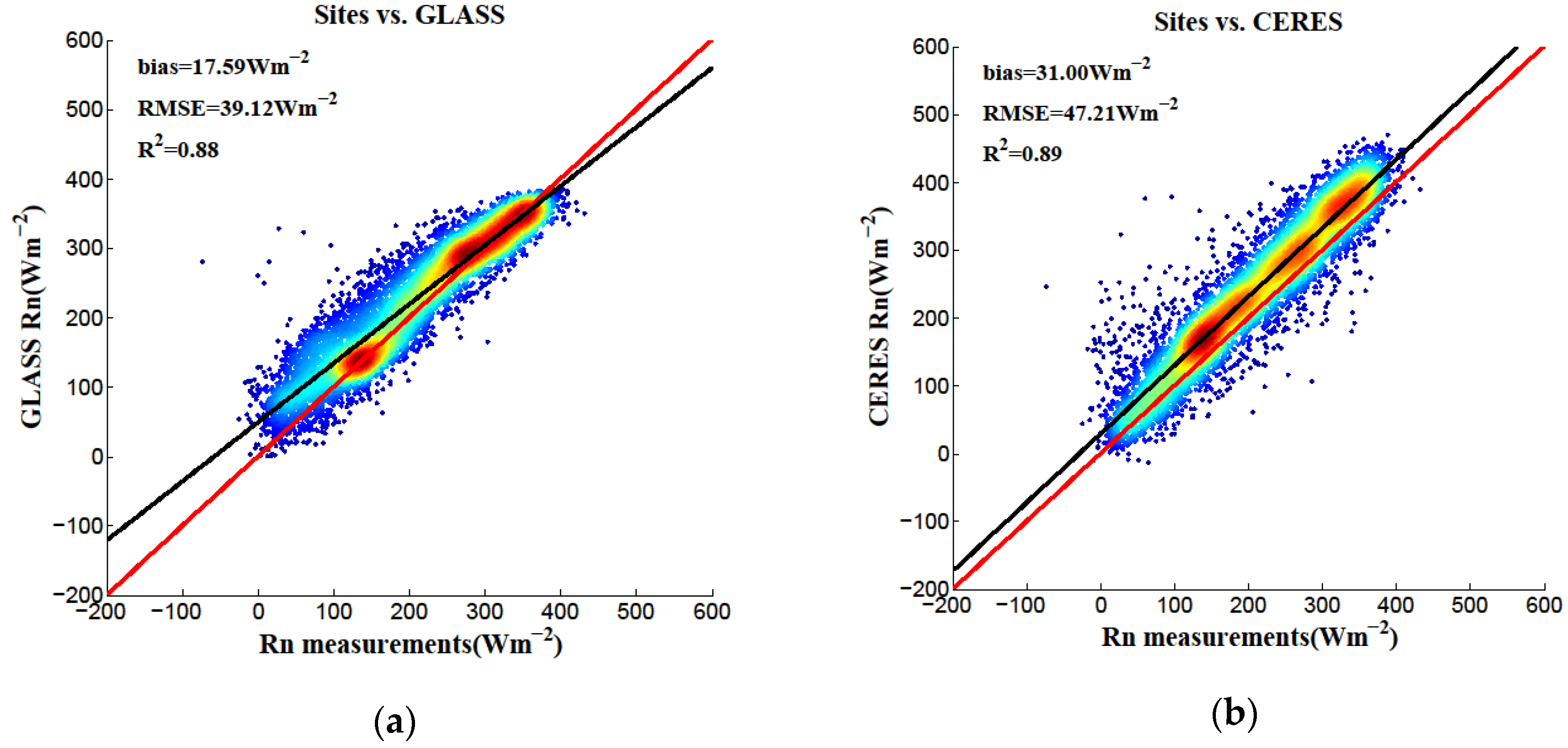
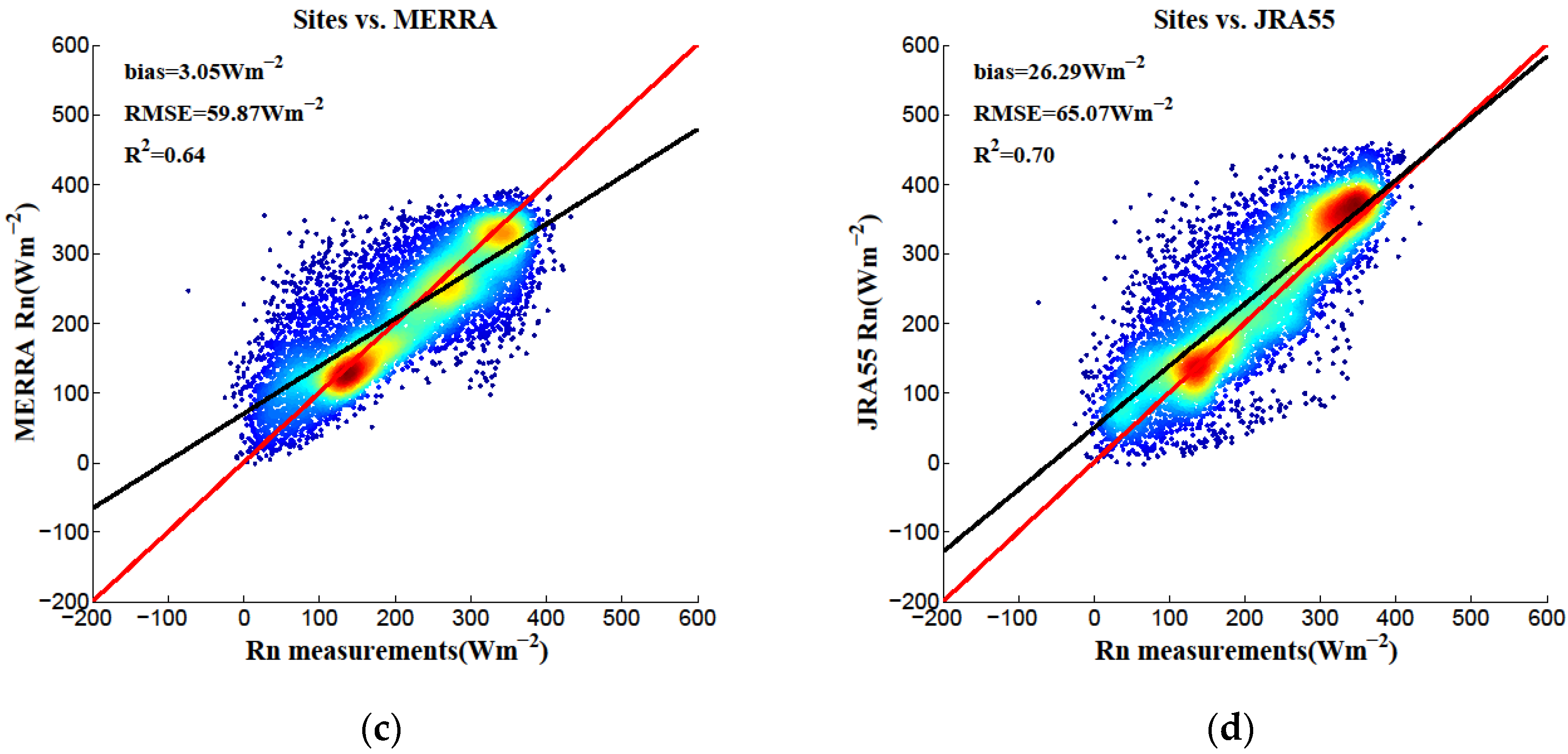
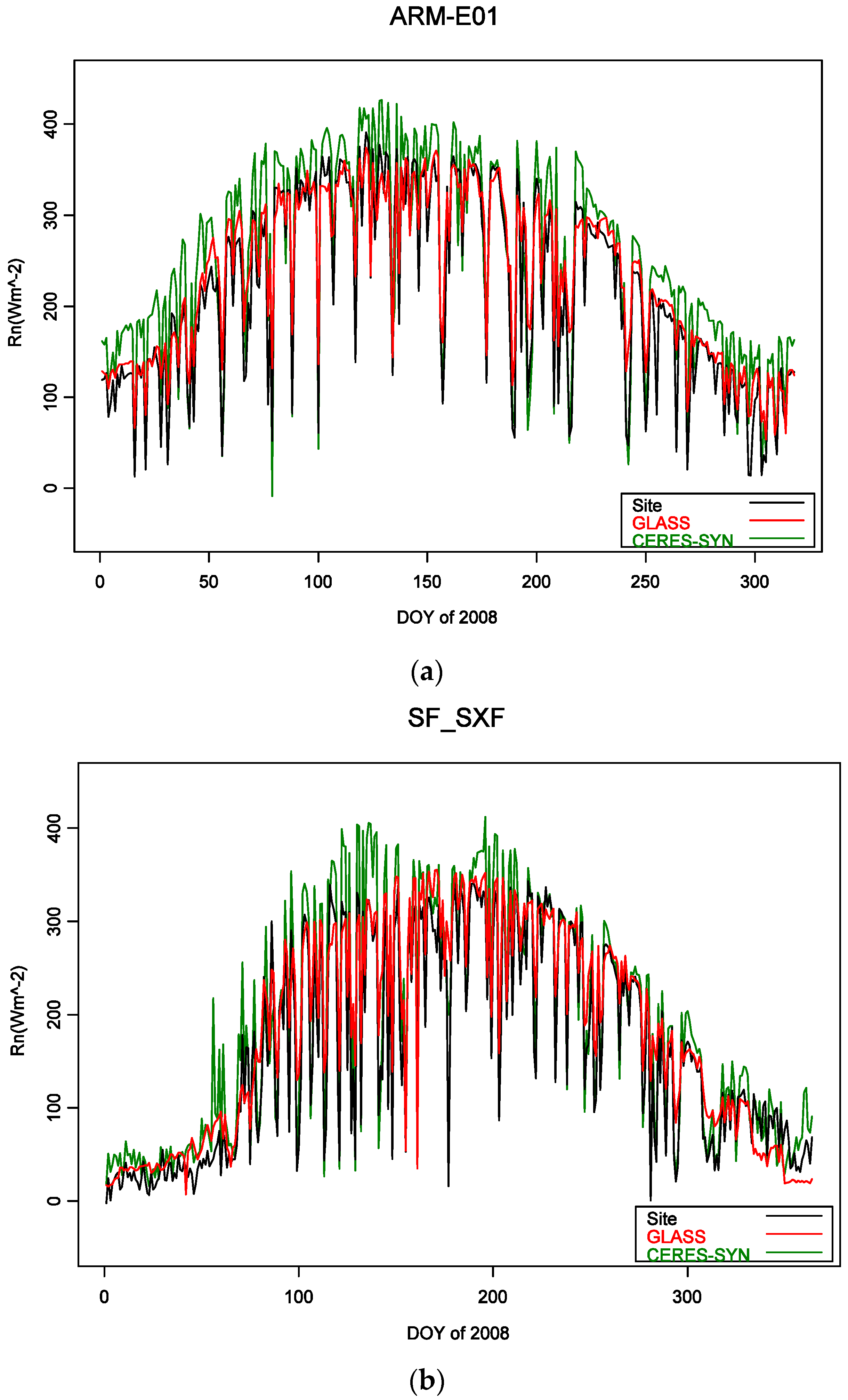
The new daytime Rn product was validated against measurements from 25 independent sites, and was also compared with one remotely sensed Rn product, CERES-SYN, and two reanalysis Rn products, MERRA and JRA55. The validation results illustrate that the new GLASS daytime Rn product delivers more detail at the global scale due to its relatively high spatial resolution and does so without spatial gaps, except for the Arctic and Antarctic regions, and that it has a continuous time series because the all-sky conditions were considered in the MARS algorithm and the GLASS incident shortwave radiation product. The validation results of the GLASS daytime Rn product at the 25 sites were very satisfactory with most applications, with an overall coefficient of determination of 0.88, an average RMSE of 31.61 Wm−2, and an average bias of 17.59 Wm−2. The results of comparing the GLASS with three other products also proved that this new daytime Rn product performed much better than the two reanalysis products and similar to CERES-SYN but with a much higher spatial resolution. Overall, the results in the present study show that the GLASS daytime Rn product generated by the MARS model is superior to other presently available products.
Although it is common practice in the literature, validating satellite products and reanalysis datasets at a spatial resolution scale from a few to hundreds of kilometers using “point” ground measurements directly provides questionable results. It is valid only if the atmospheric and surface conditions are homogeneous. An upscaling process using intermediate-resolution products is necessary for many heterogeneous landscapes and atmospheric conditions [
48]. A further project conducted by us for addressing the scaling issue is underway, and the results will be presented in the near future.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}