
Multi-Class Simultaneous Adaptive Segmentation and Quality Control of Point Cloud Data



Abstract
:
1. Introduction
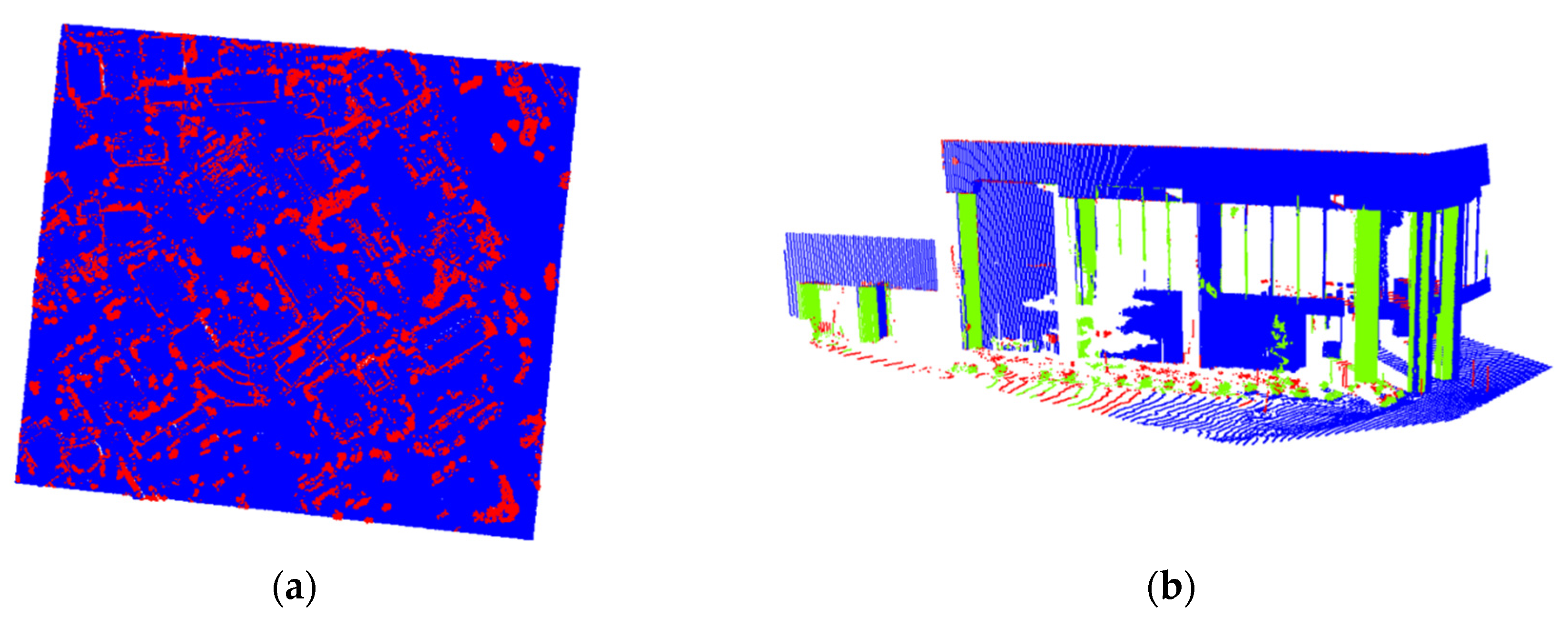
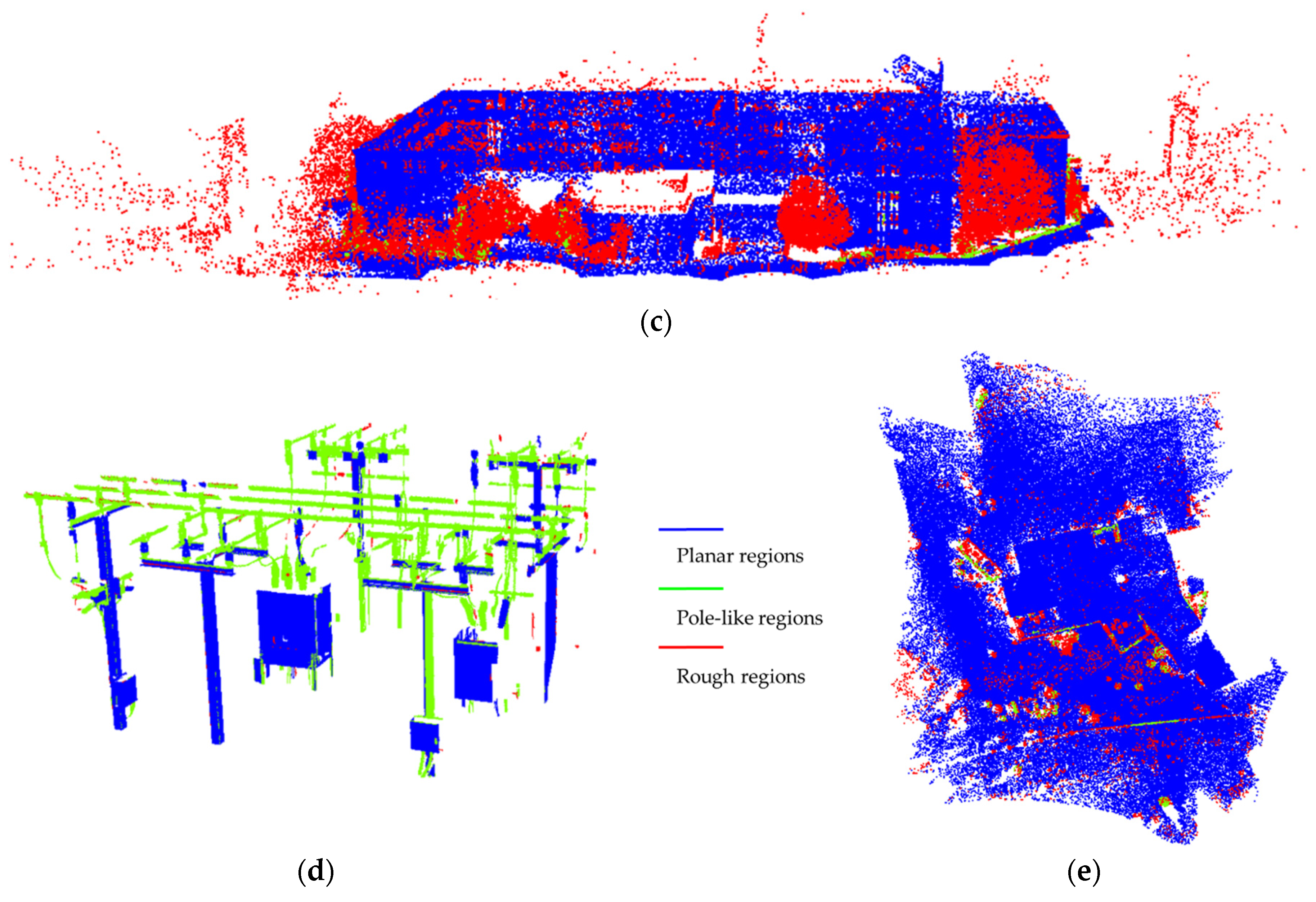
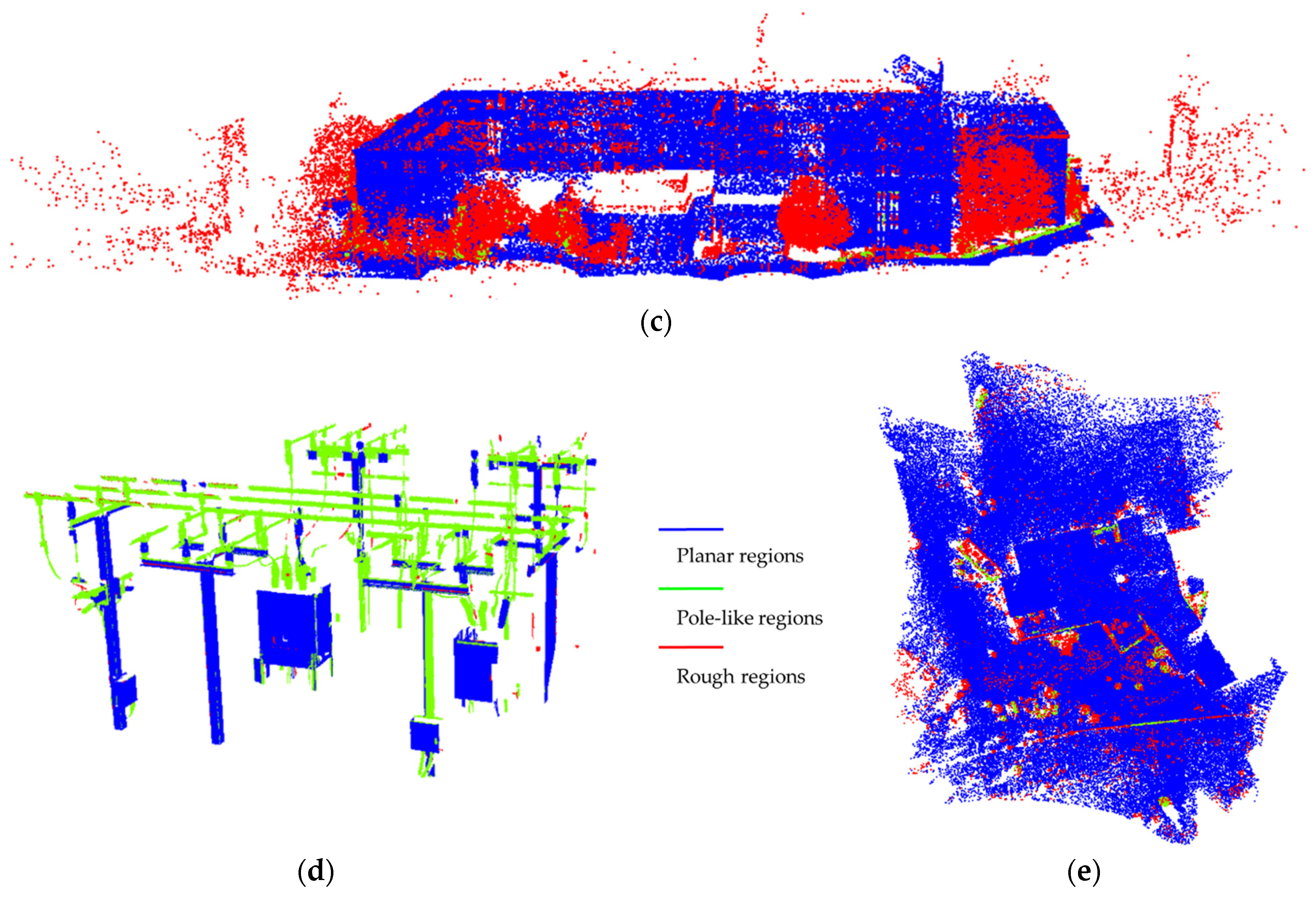
- Planar and varying-radii pole-like features are simultaneously segmented,
- ALS, TLS, MTLS, and image-based point clouds can be manipulated by the proposed segmentation procedure,
- The region-growing process starts from optimally-selected seed regions to reduce the sensitivity of the segmentation outcome to the choice of the seed location,
- The region-growing process considers variations in the local characteristics of the point cloud (i.e., local point density/spacing and noise level),
- The QC process considers possible competition among neighboring planar and pole-like features for the same points,
- The QC procedure considers possible artifacts arising from the sequence of the region growing process, and
- The QC process considers the possibility of having partially or fully misclassified planar and pole-like features.
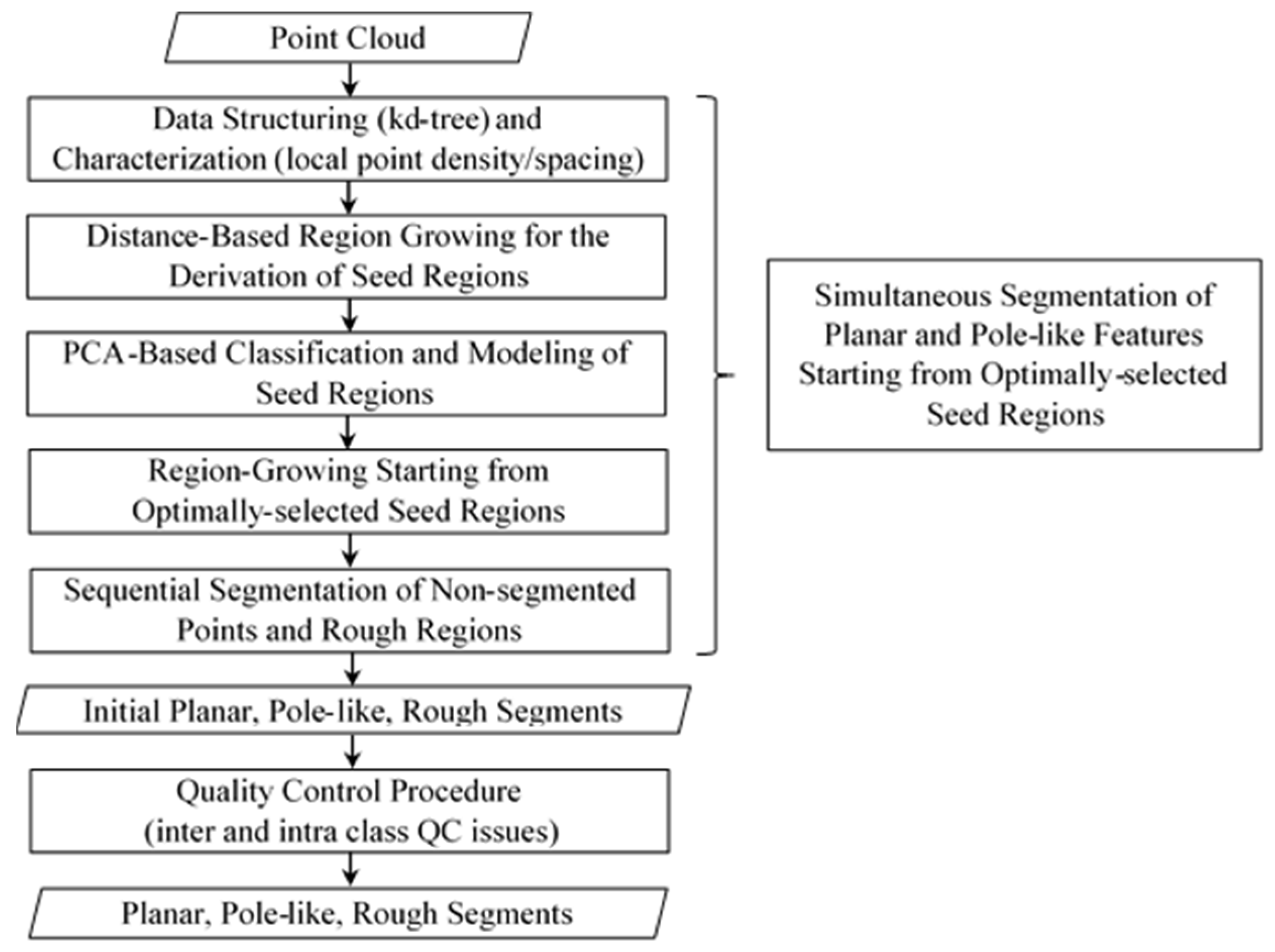
2. Proposed Methodology
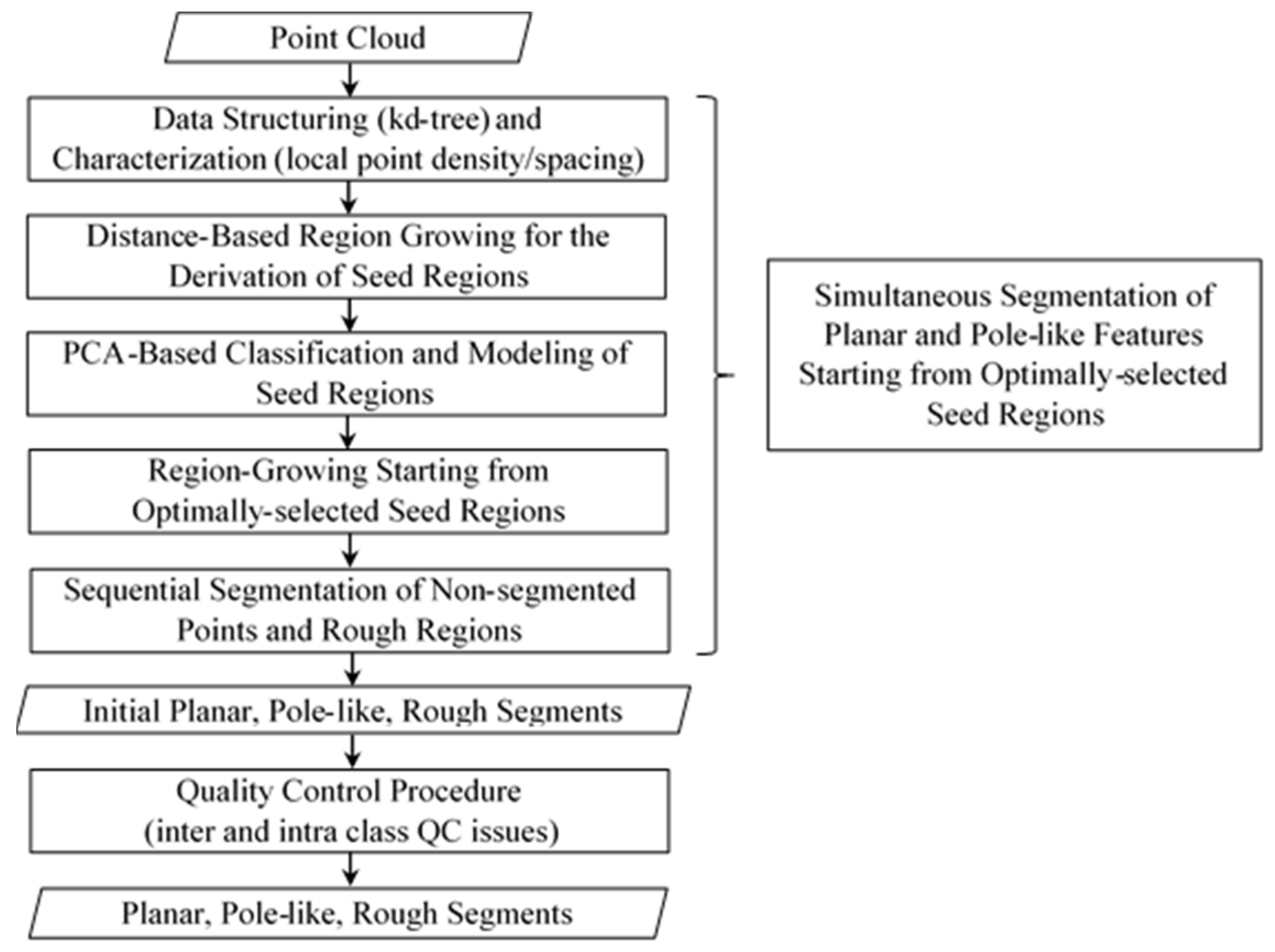
2.1. Simultaneous Segmentation of Planar and Pole-Like Features Starting from Optimally-Selected Seed Regions
2.1.1. Data Structuring and Characterization

| ALS | TLS1 | TLS2 | TLS3 | DIM | |
|---|---|---|---|---|---|
| Number of Points | 812,980 | 170,296 | 201,846 | 455,167 | 230,434 |
| Max. Planar LPD (pts/m2) | 4.518 | 1549 | 324.54 | 73,443 | 404 |
| Min. Planar LPD (pts/m2) | 0.058 | 1.687 | ≈0.000 | 17.351 | 1.234 |
| Mean Planar LPD (pts/m2) | 2.596 | 781 | 27.305 | 17,685 | 104 |
| Max. Linear LPD (pts/m) | 10.197 | 140 | 8.473 | 1,186 | 0 |
| Min. Linear LPD (pts/m) | 7.708 | 16.777 | 8.473 | 55.093 | 0 |
| Mean Linear LPD (pts/m) | 8.960 | 62.396 | 8.473 | 276 | 0 |
| Max. Cylindrical LPD (pts/m2) | 3.204 | 2,423 | 999 | 34,337 | 375 |
| Min. Cylindrical LPD (pts/m2) | 2.059 | 6.132 | 1.707 | 10.063 | 3.066 |
| Mean Cylindrical LPD (pts/m2) | 2.990 | 313 | 41.216 | 6,055 | 46.045 |
| Max. Rough LPD (pts/m3) | 1.329 | 9,267 | 2,120 | 1,954,807 | 1217 |
| Min. Rough LPD (pts/m3) | 0.001 | 1.980 | ≈0.000 | 11.688 | 0.053 |
| Mean Rough LPD (pts/m3) | 0.363 | 1818 | 26.238 | 230,796 | 145 |
2.1.2. Distance-Based Region Growing for the Derivation of Seed Regions
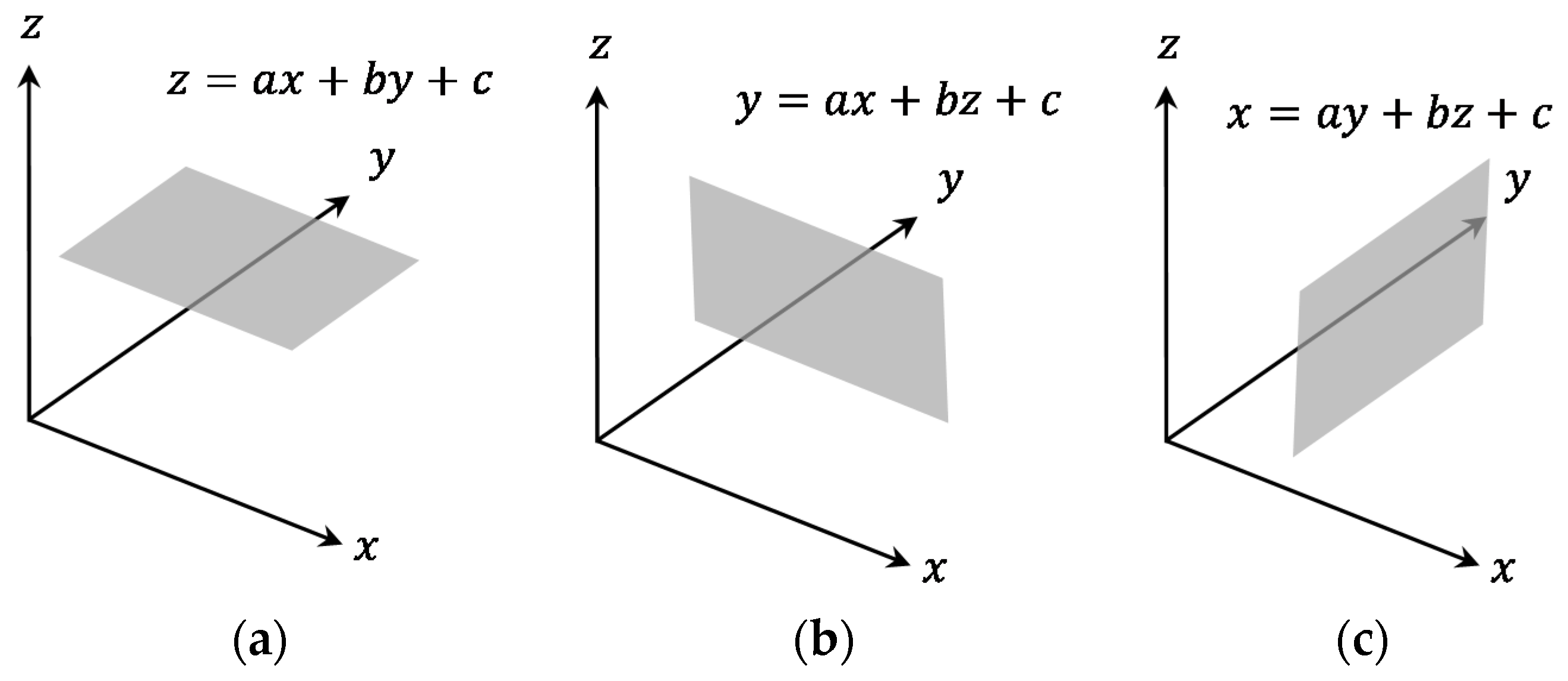
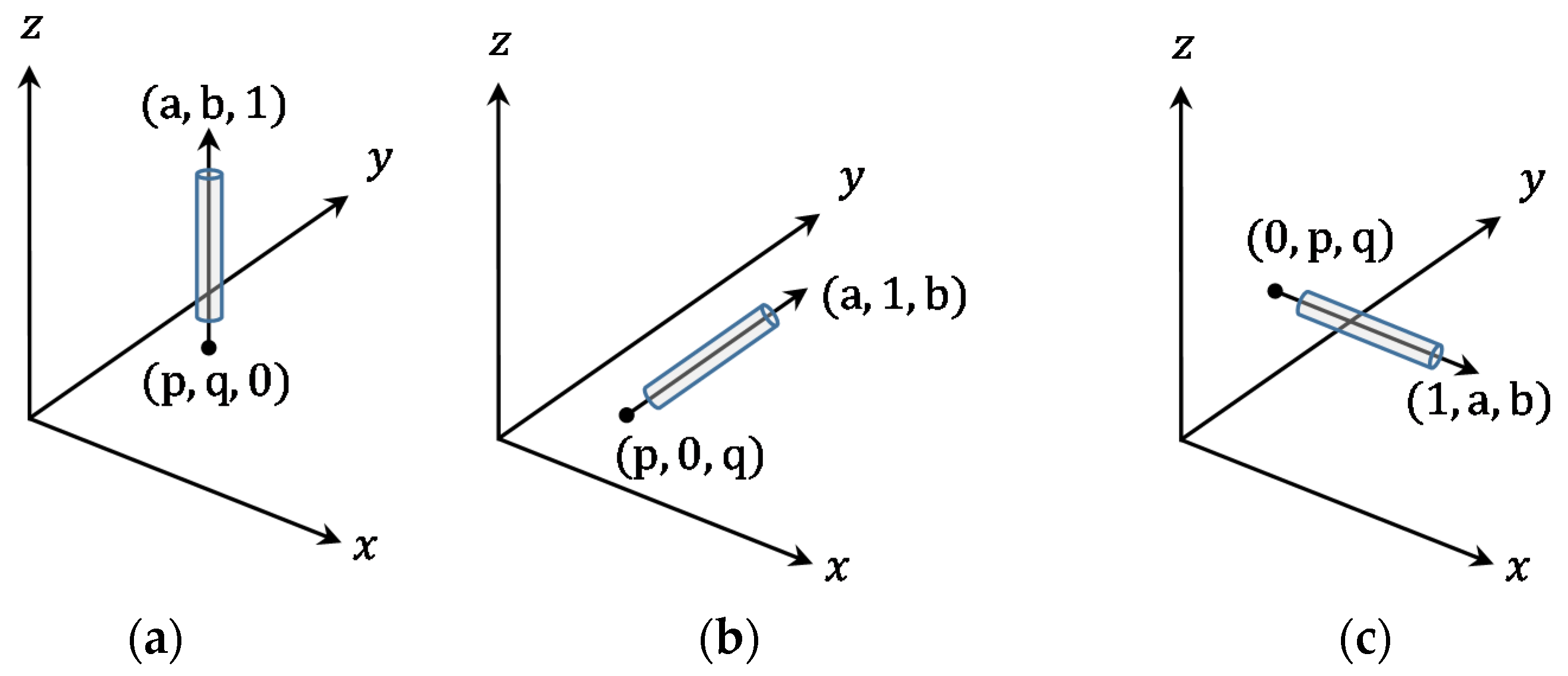
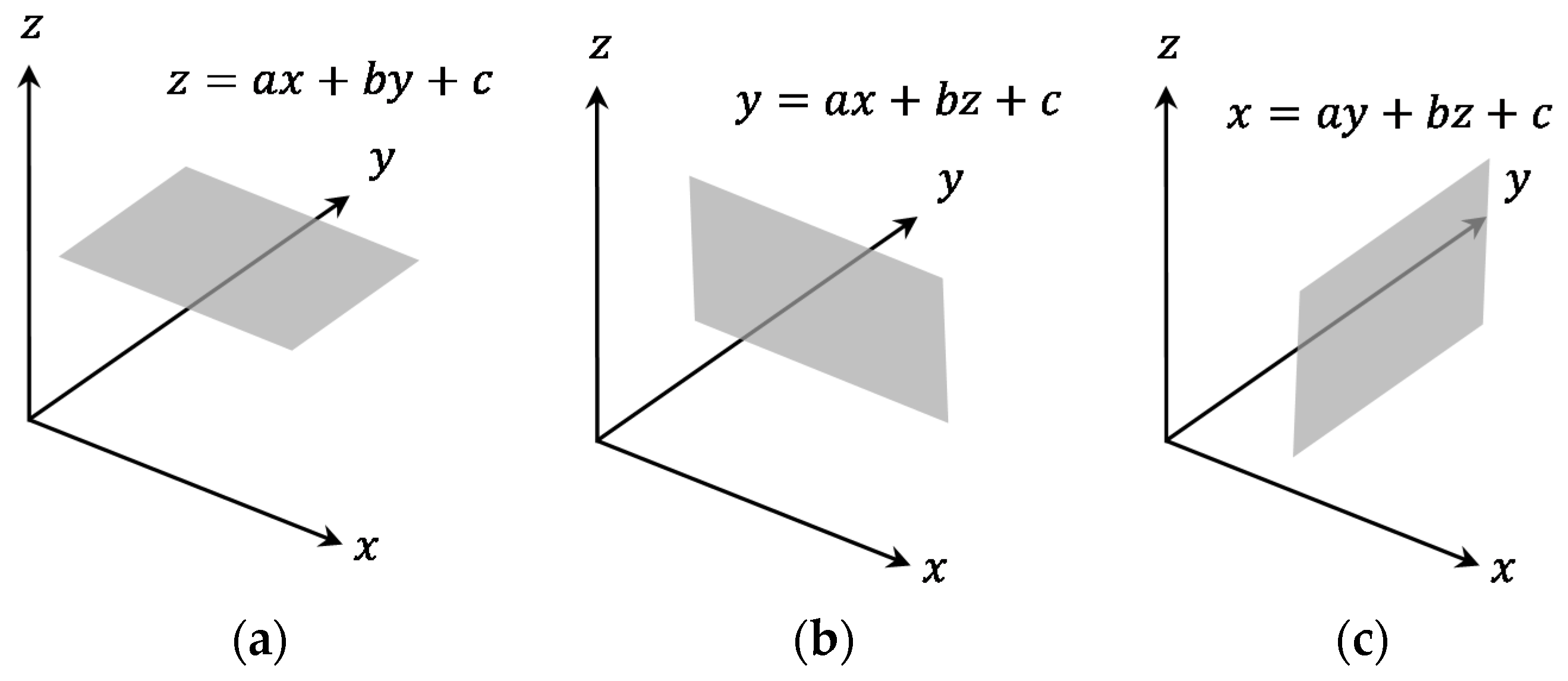
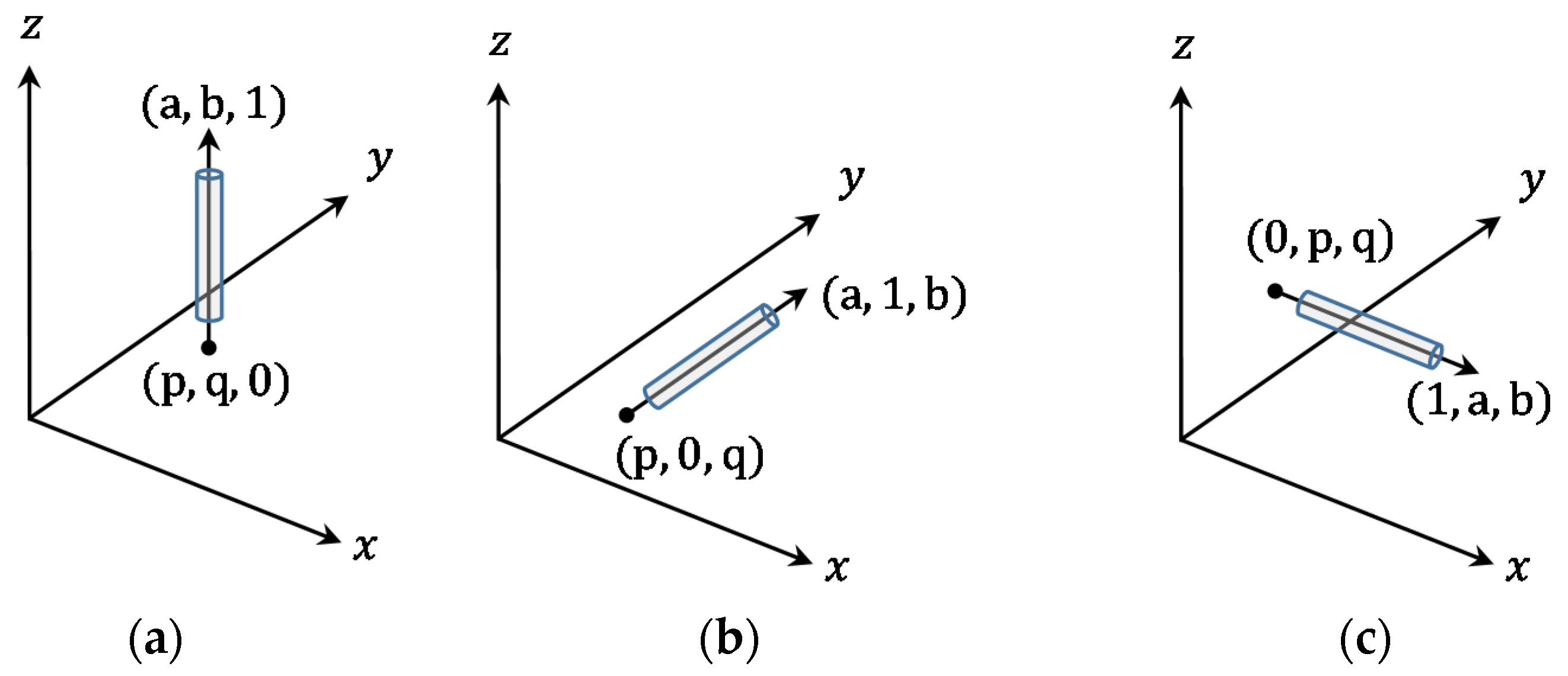
2.1.3. PCA-Based Classification and Modeling of Seed Regions
2.1.4. Region-Growing Starting from Optimally-Selected Seed Regions
2.1.5. Sequential Segmentation of Non-Segmented Points and Rough Regions
- Starting from a non-segmented/non-classified point, a distance-based region growing is implemented, according the established LPS, until a pre-defined seed-region size is achieved.
- For the established seed region, PCA is used to decide whether the seed region represents planar, pole-like, or rough neighborhood. If the seed region is deemed as being part of a planar or pole-like feature, the parameters of the respective model are estimated through a LSA procedure.
- A region-growing process is carried out using the LPS and quality of fit with the established model in the previous step as the similarity measures. Throughout the region-growing process, the model parameters and the respective a-posteriori variance factor are sequentially updated.
- Steps 1–3 are repeated until all the non-segmented/non-classified nodes within the kd-tree data structure are considered.
- For the seed regions, which have been classified as being part of rough neighborhoods during the first or the second stages of the segmentation procedure, we conduct a distance-based region-growing of non-segmented points.
- Finally, we inspect the kd-tree starting from its root node to identify non-segmented/non-classified nodes, which are utilized as seed points for a distance-based segmentation of rough regions.
2.2. Quality Control of the Segmentation Outcome
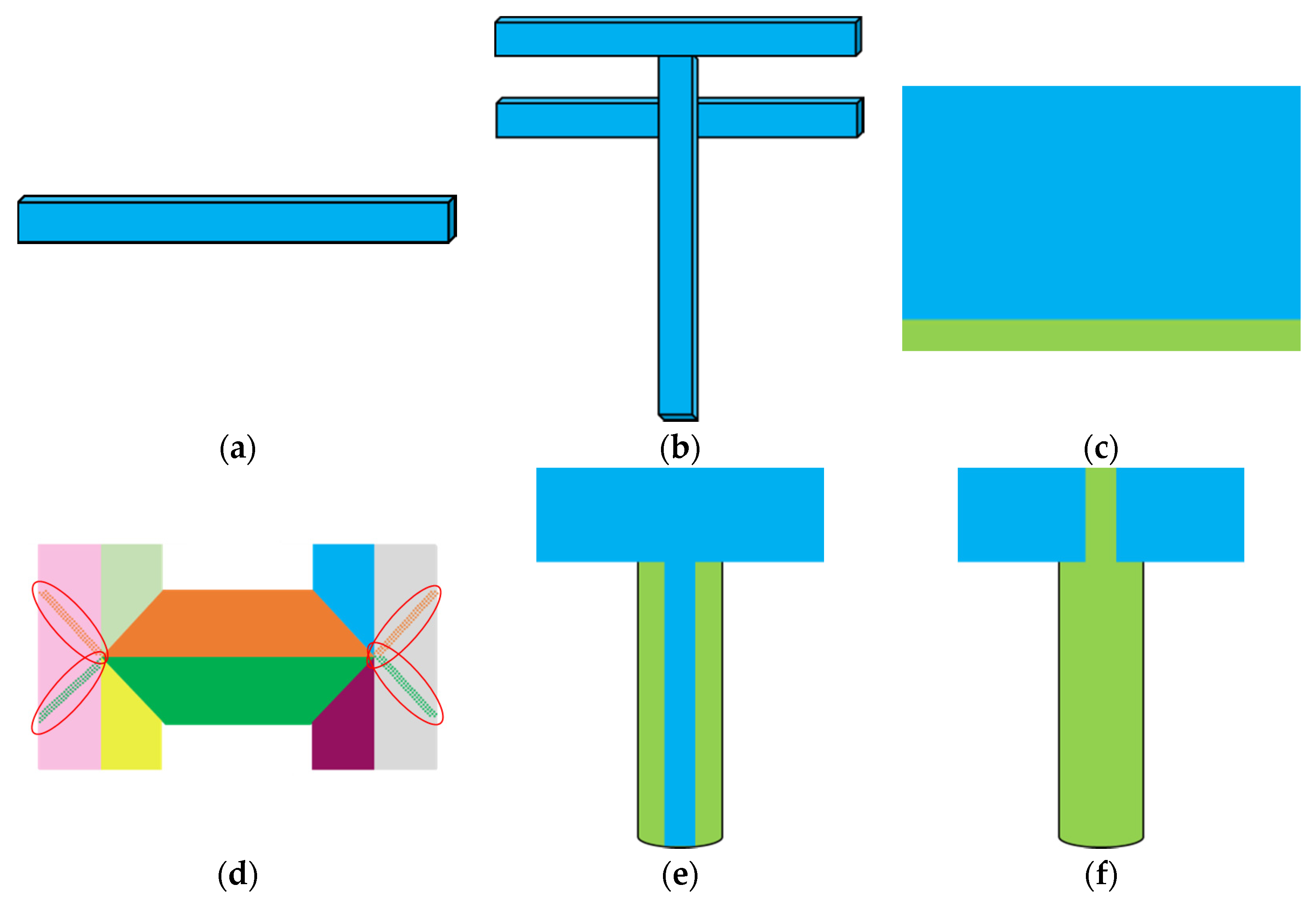
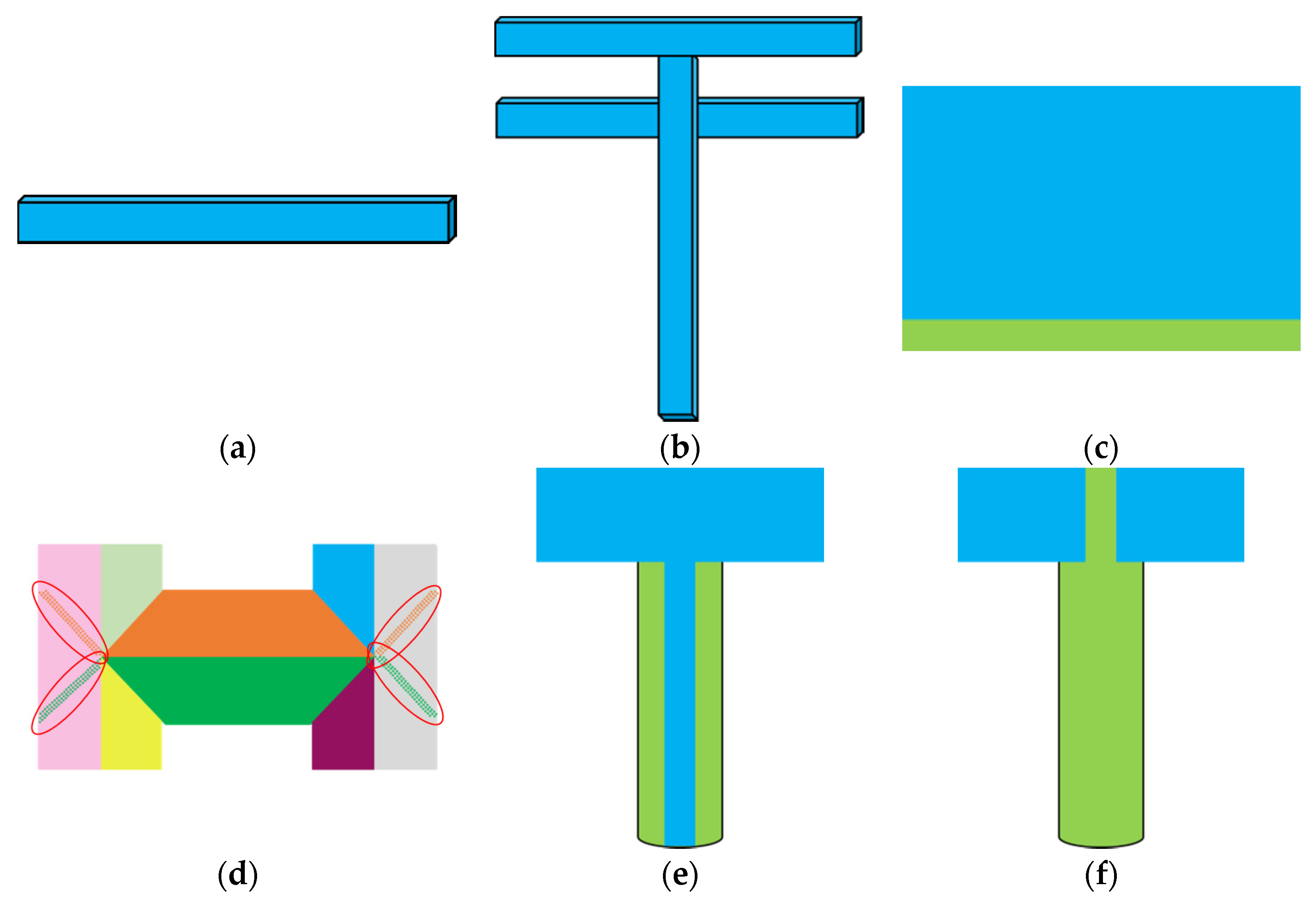
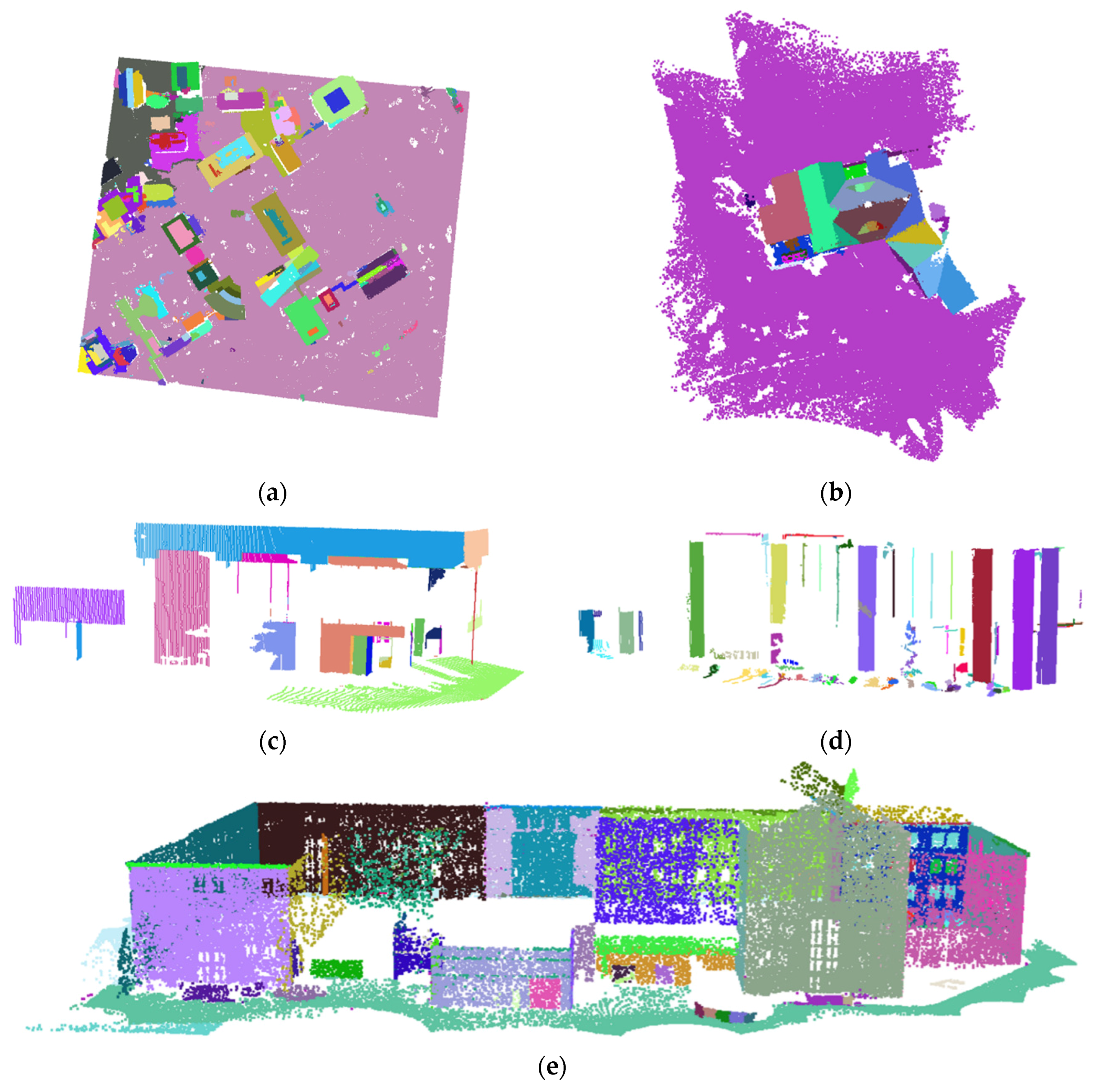
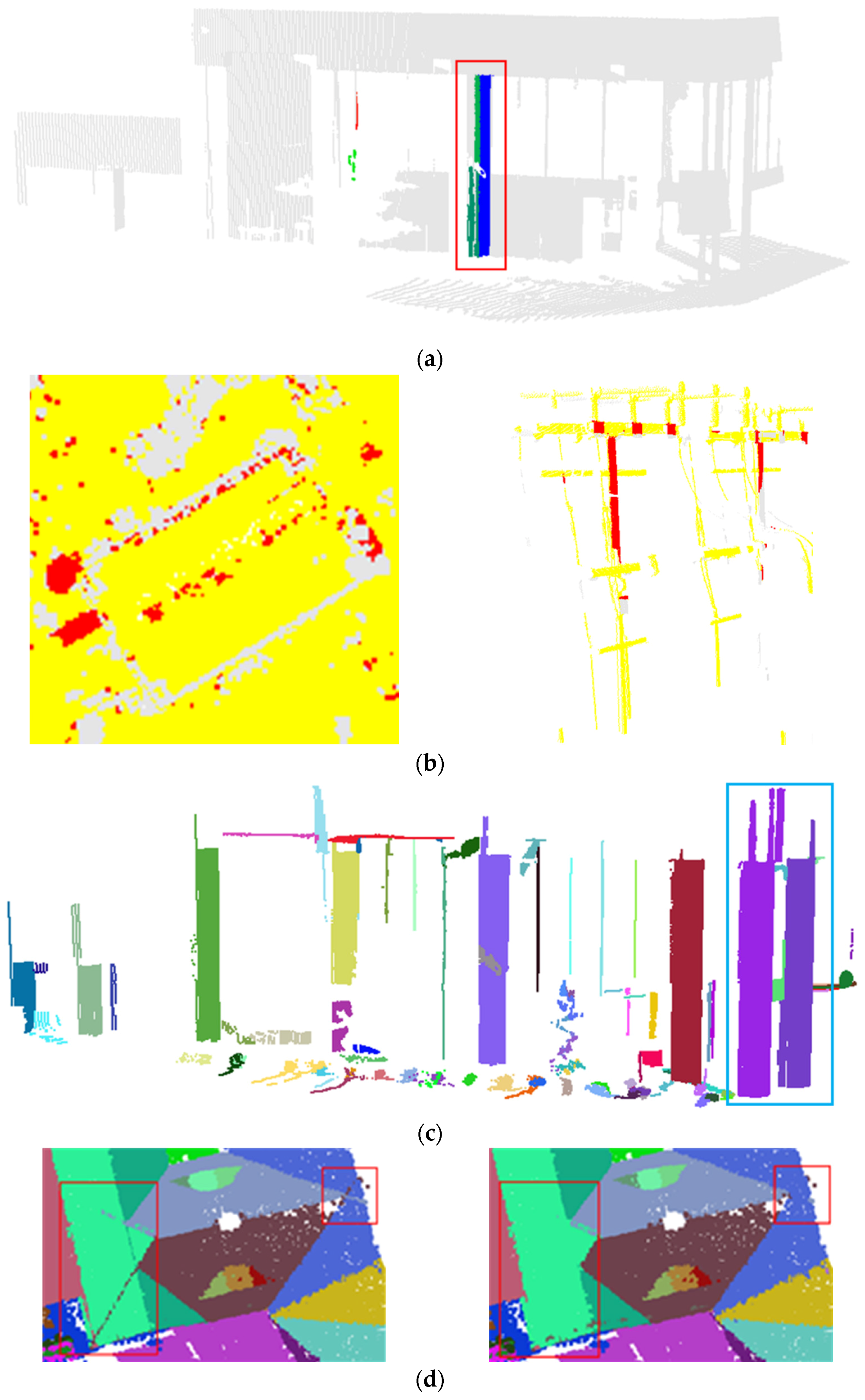
- Misclassified planar features: Depending on the LPD/LPS and pre-set size for the seed regions, a pole-like feature might be wrongly classified as a planar region. This situation might be manifested in one of the following scenarios:
- Misclassified linear features: depending on the location of the randomly-established seed points, a portion of a planar region might be classified as a single pole-like feature (Figure 4c).
- Partially misclassified planar and pole-like features: Depending on the order of the region growing process, segmented planar/pole-like features at the earlier stage of the segmentation process might invade neighboring planar/pole-like features. This situation might be manifested in one of the following scenarios:
- Earlier-segmented planar regions invade neighboring planar features (Figure 4d),
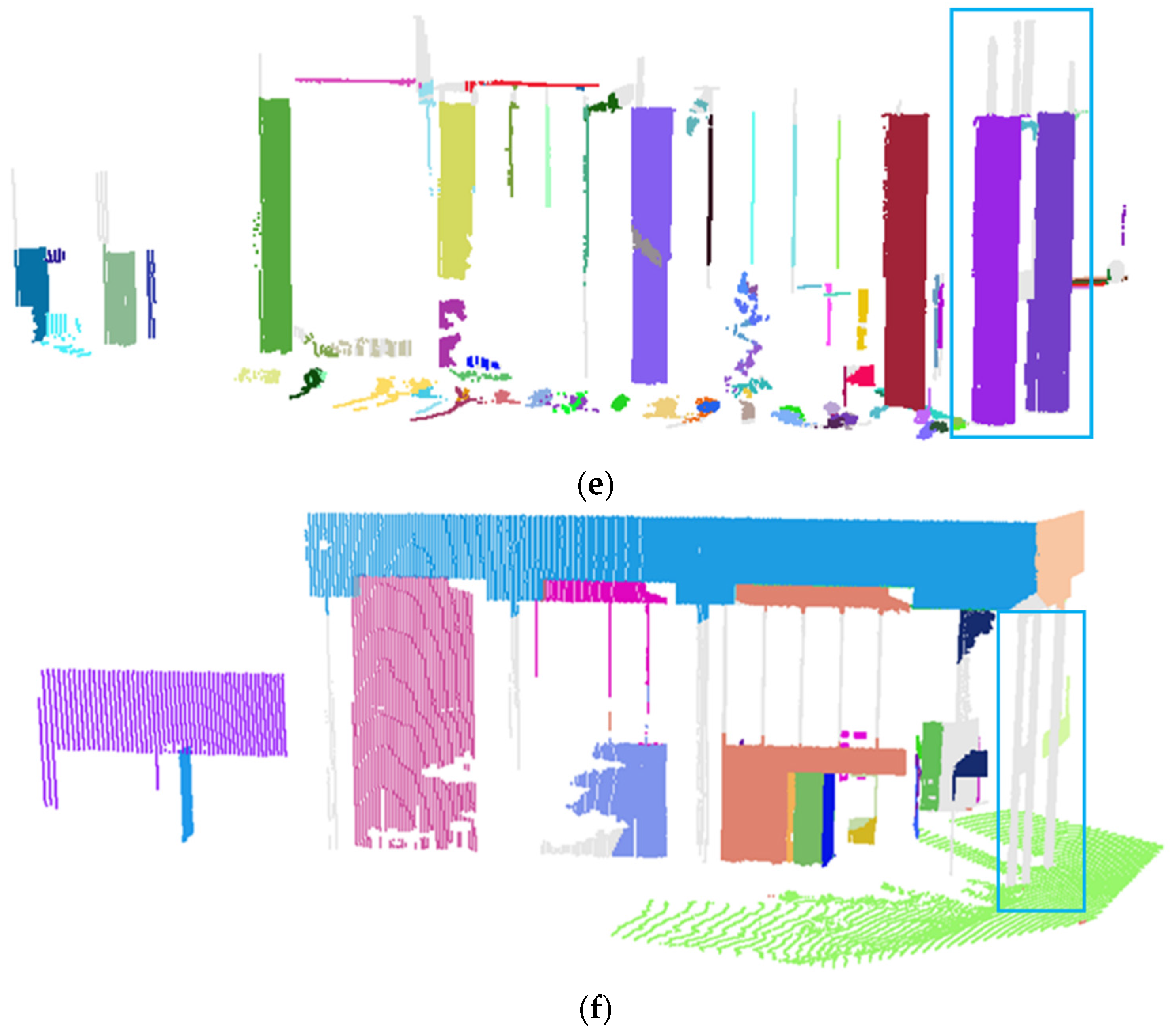
- Earlier-segmented planar regions fully or partially invade neighboring pole-like features (Figure 4e, where a planar region partially invade a neighboring pole-like feature), and
- Earlier-segmented pole-like features invade neighboring planar features (Figure 4f).
- itial mitigation of interclass competition for neighboring points: A key problem in region-growing segmentation is that derived regions at an early stage might invade neighboring features of the same or different class, which are derived at a later stage. In this QC category, we consider potential invasion among features that belong to different classes. Specifically, for segmented features in a given class (i.e., planar or pole-like features), features in the other classes (including rough regions) will be considered as potential candidates that could be incorporated into the constituent regions of the former class. For example, the constituents of pole-like features and rough regions will be considered as potential candidates that could be incorporated into planar features. In this case, if a planar feature has potential candidates, which are spatially close as indicated by the established LPS, and the normal distance between those potential candidates and the LSA-based model through that planar feature is within the respective a-posteriori variance factor, those potential candidates will be incorporated into the planar feature in question. The same procedure is applied for pole-like features, while considering planar and rough regions as potential candidates. In this regard, the respective QC measure——is evaluated according to Equation (7), where represents the number of incorporated points from other classes and represents the number of potential candidates for this class. For that QC measure, lower percentage indicates lower instances of points that have been incorporated from other classes.
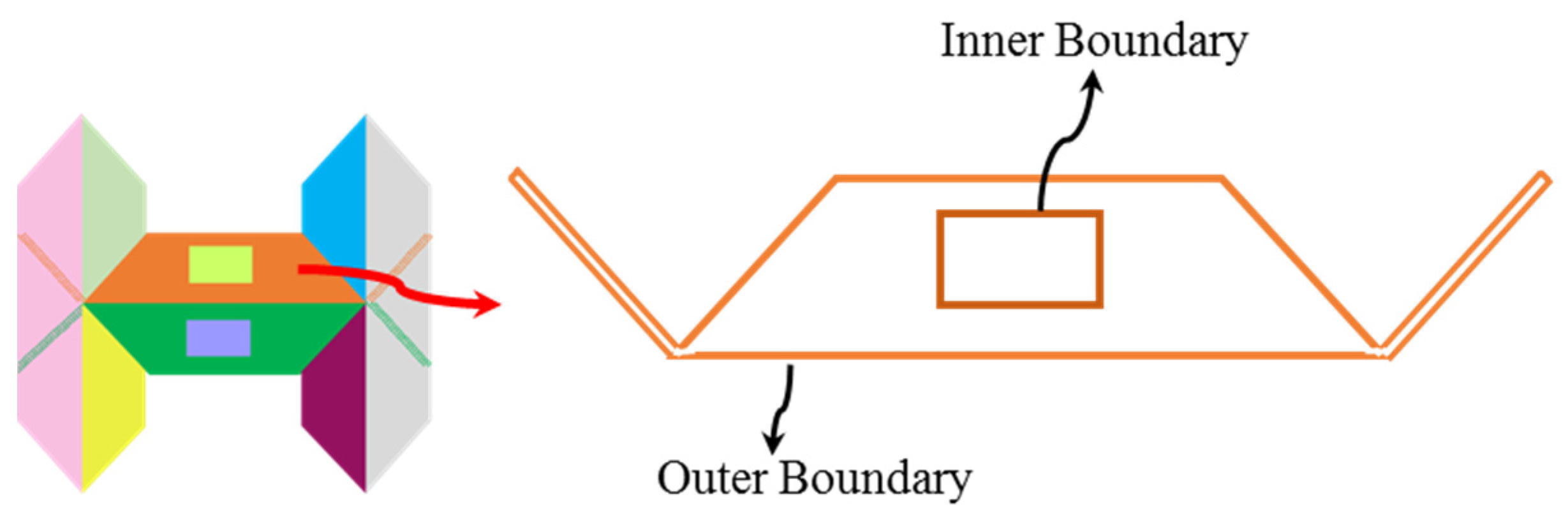
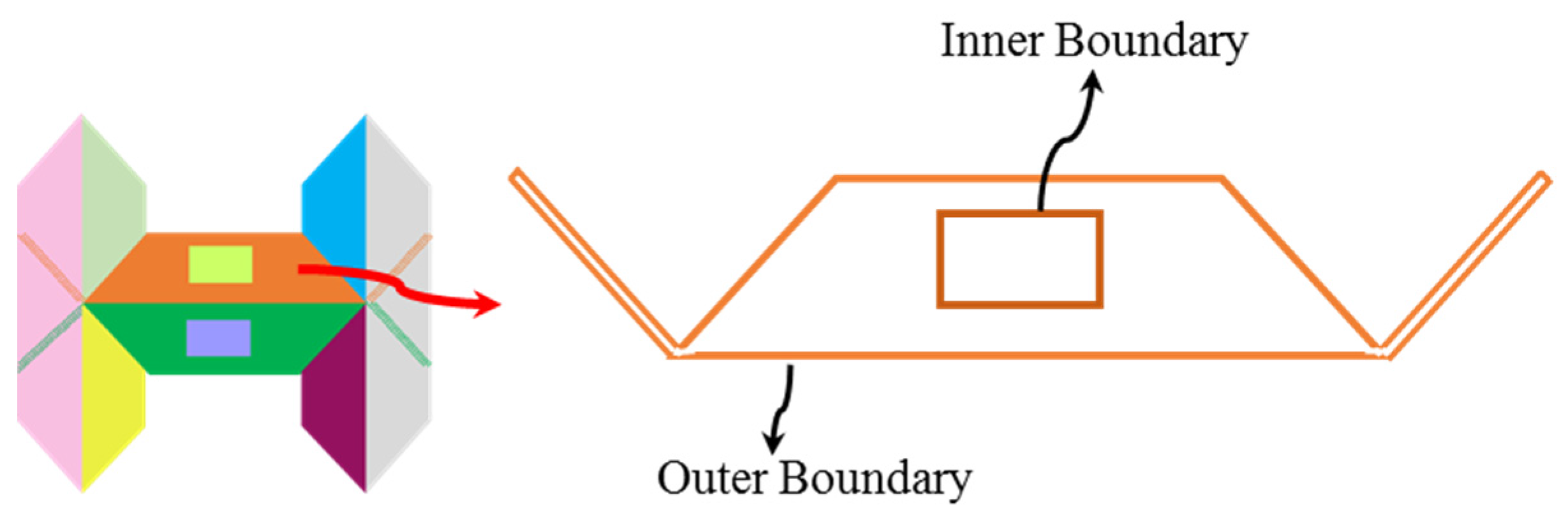
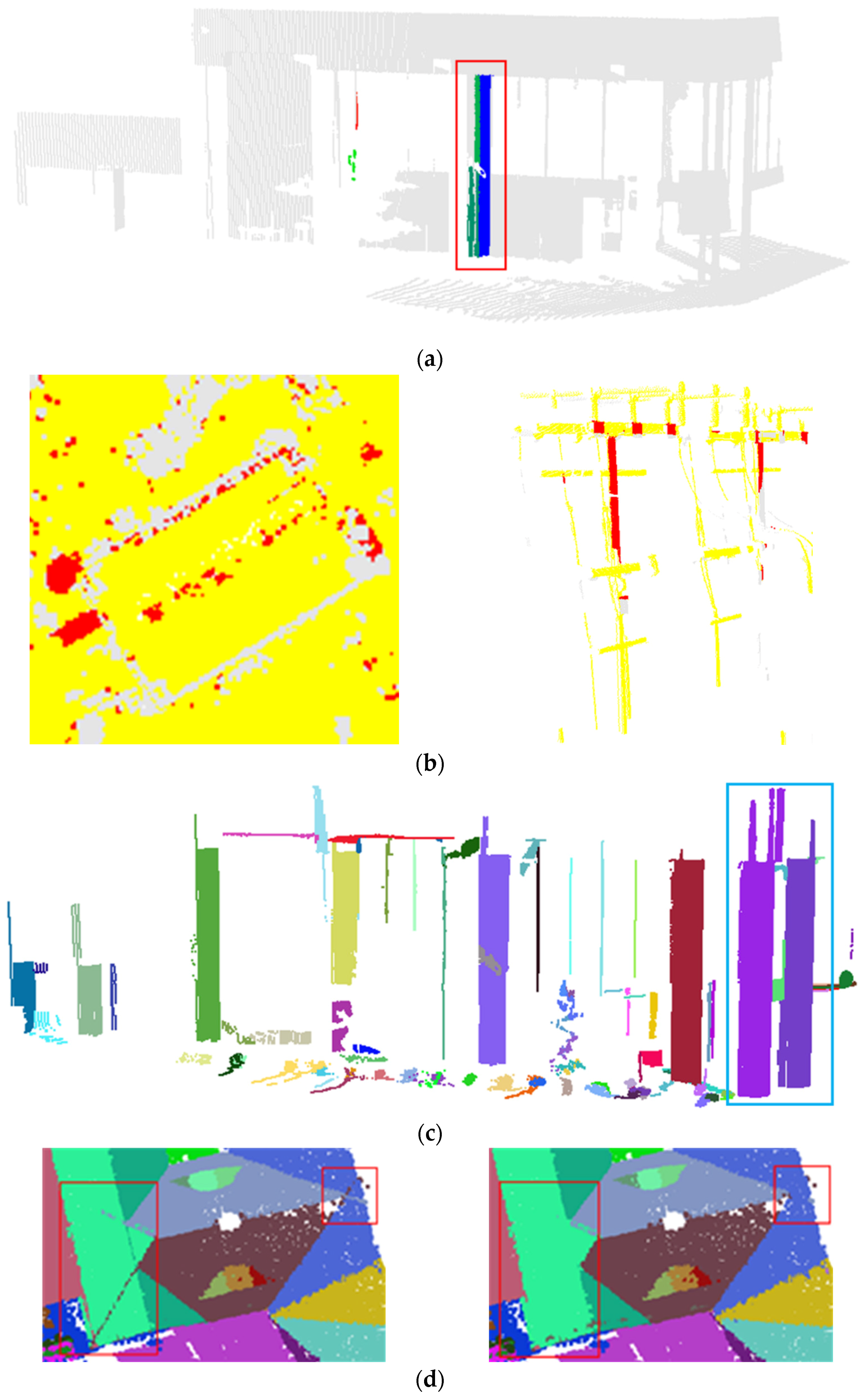
- Mitigation of intraclass competition for neighboring points: This problem takes place whenever a feature, which has been derived at the earlier stage of the region growing, invades other features from the same class that have been segmented at a later stage. One can argue that intraclass competition for pole-like features is quite limited (this is mainly due to the narrow spread of pole-like features across its axis). Therefore, for this QC measure, we only consider intraclass completion for planar features (as can be seen in Figure 4d, where the middle planar regions invade the left and right planar features with the invading portions highlighted by red ellipses). Detection and mitigation of such problem starts by deriving the inner and outer boundaries of the segmented planar regions (Figure 5 illustrates an example of inner and outer boundaries for a given segment). The inner and outer boundaries can be derived using the minimum convex hull and inter-point-maximum-angle procedures presented by Sampath and Shan [44] and Lari and Habib [45], respectively. Then, for each of the planar regions, we check if some of their constituents are located within the boundaries of neighboring regions and at the same time the normal distances between such constituents and the fitted model through the neighboring regions are within their respective a-posteriori variance factor. In such a case, the individual points that satisfy these conditions are transformed from the invading planar feature to the invaded one. For such QC category, the respective measure is determined according to Equation (8), where represents the number of invading planar points that have been transformed from the invading to the invaded segments and represents the total number of originally-segmented planar points. In this case, lower percentage indicates lower instances of such problem.Figure 5. Inner and outer boundary derivation for the identification of intraclass competition for neighboring points.Figure 5. Inner and outer boundary derivation for the identification of intraclass competition for neighboring points.
![Remotesensing 08 00104 g005]()
- Single pole-like feature wrongly classified as a planar one: To detect such instances (Figure 4a is a schematic illustration of such situation), we perform PCA of the constituents of the individual planar features. For such segmentation problem, the PCA-based normalized Eigen values will indicate 1-D spread of such regions. Whenever such scenario is encountered, the LSA-based parameters of the fitted cylinder through this feature together with the respective a-posteriori variance factor are derived. The planar feature will be reclassified as a pole-like one if the latter’s a-posteriori variance factor is almost equivalent to the planar-based one. For this case, the respective QC measure——is represented by Equation (9), where is the number of points within reclassified linear features and is the total number of points within the originally-segmented planar features. In this case, lower percentage indicates fewer instances of such a problem.
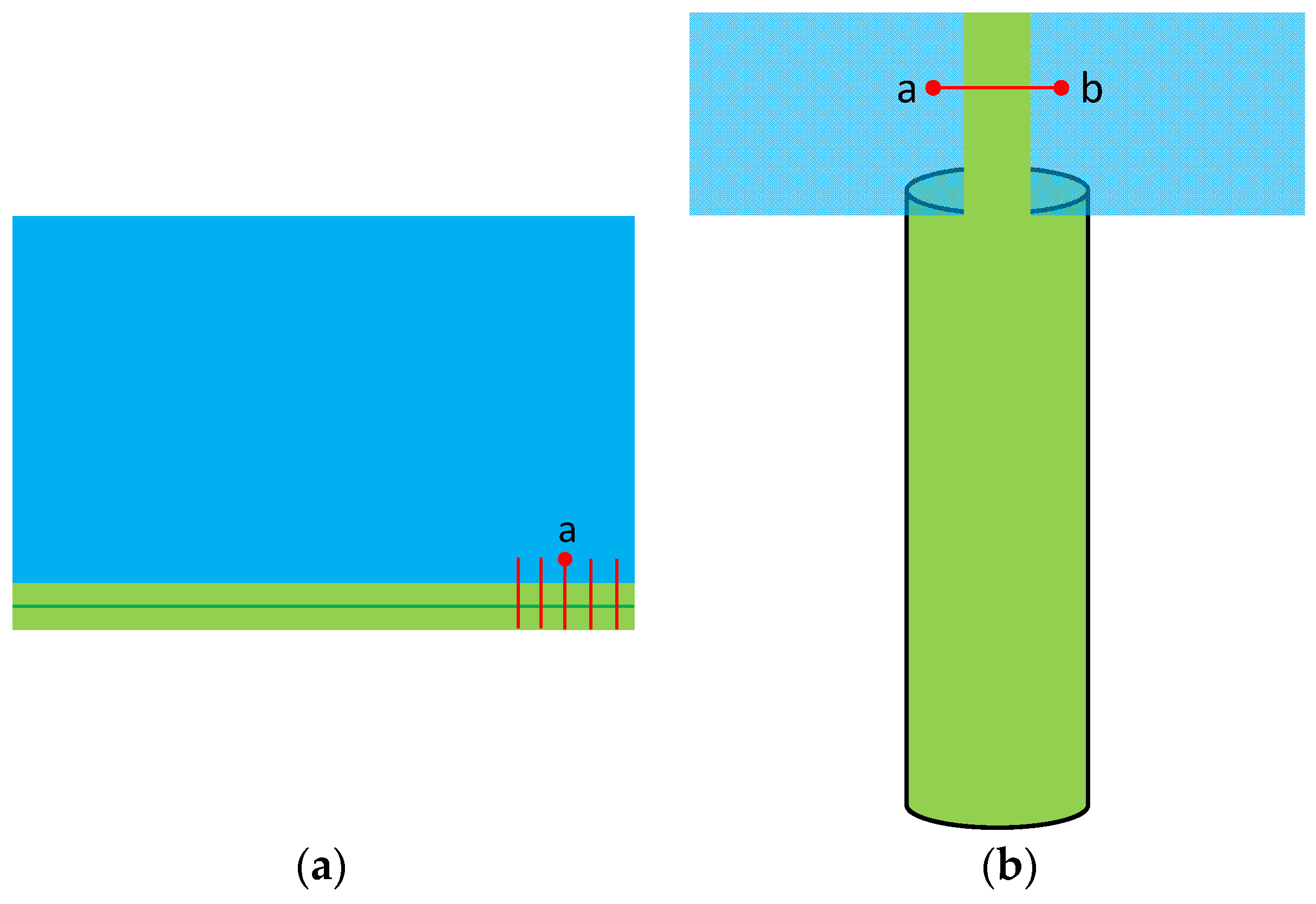
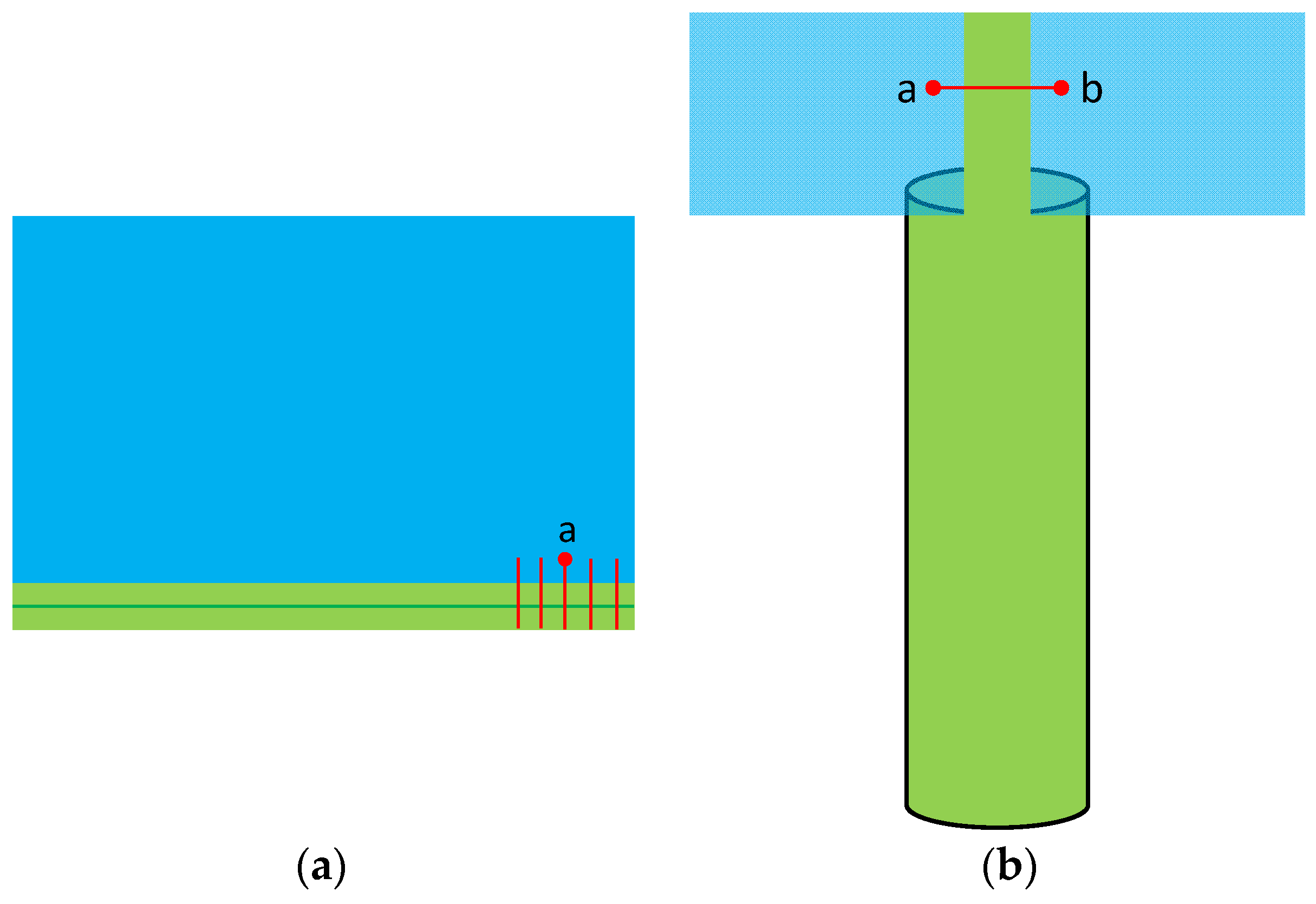
- Mitigation of fully or partially misclassified pole-like features: For this problem (as illustrated by Figure 4c,f), we identify pole-like features or portions of pole-like features that are encompassed within neighboring planar features. The process starts with identifying neighboring pole-like and planar features where the axis of the pole-like feature is perpendicular to the planar-feature normal. Then, the constituents of the pole-like feature are projected onto the plane defined by the planar feature. Instances, where the pole-like feature is encompassed—either fully or partially—within the planar feature, are identified by slicing the pole-like feature in the across direction to its axis. For each of the slices, we determine the closest planar point(s) that does (do) not belong to the pole-like feature in question (e.g., point in Figure 6a or points in Figure 6b). If the closest point(s) happen to be immediate neighbor(s) of the constituents of that slice (as defined by the established LPS), then one can suspect that the portion of the pole-like feature at the vicinity of that slice might be encompassed within the neighboring planar region (i.e., that portion of the pole-like feature might be invading the planar region). To confirm or reject this suspicion, we evaluate the normal distances between the constituents of the slice and the neighboring planar region. If these normal distances are within the respective a-posteriori variance factor for the planar region, we confirm that the slice is encompassed within the planar region. Whenever the pole-like feature is fully encompassed within the planar region (Figure 6a), all the slices will have immediate neighbors from that planar region while having minimal normal distances. Consequently, the entire pole-like feature will be reassigned to the planar region. On the other hand, whenever the linear feature is partially encompassed within the planar region, we identify the slices where the closest neighbors to such slices are not immediate neighbors (Figure 6b). The portion of the pole-like feature, which is defined by such slices, will be retained while the other portion will be reassigned to the planar region. The QC measure in this case is defined by Equation (10), where represents the number of points within the pole-like feature that are encompassed within the planar feature and is the total number of points within the originally-segmented linear features. Lower percentage indicates fewer instances of such problem.Figure 6. Slicing and immediate-neighbors concept for the identification of fully/partially misclassified pole-like features (a)/(b).Figure 6. Slicing and immediate-neighbors concept for the identification of fully/partially misclassified pole-like features (a)/(b).
![Remotesensing 08 00104 g006]()
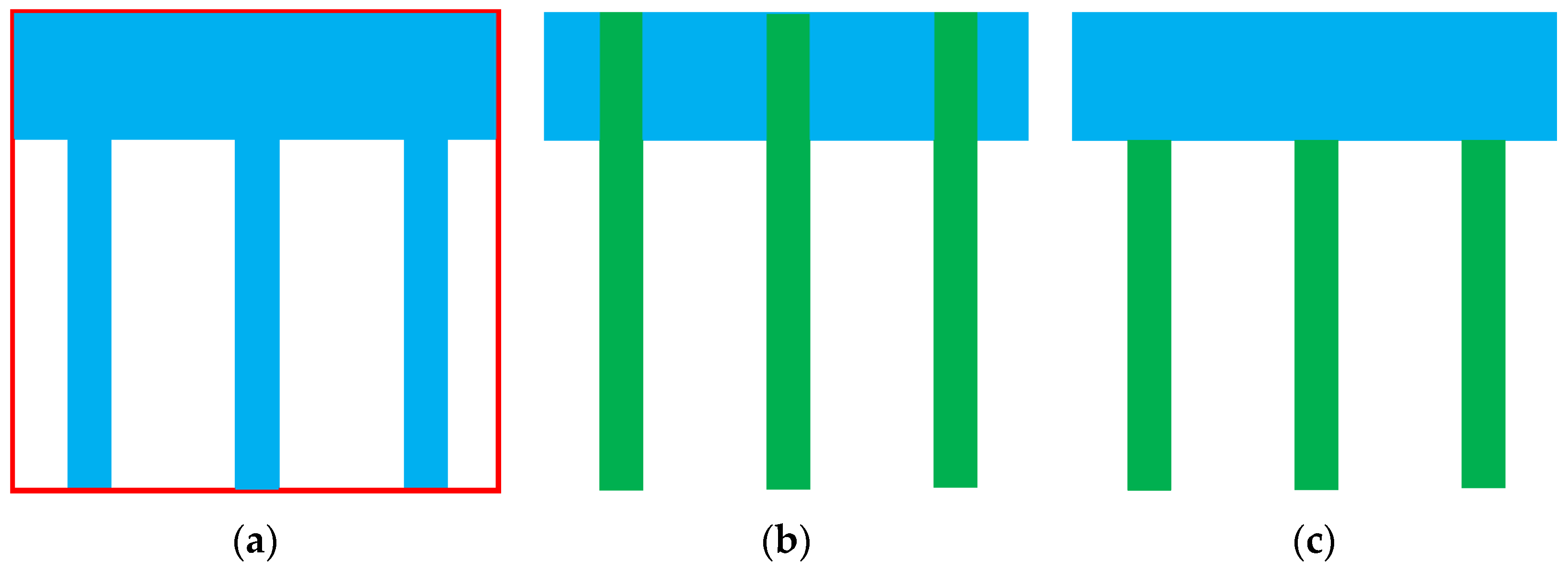
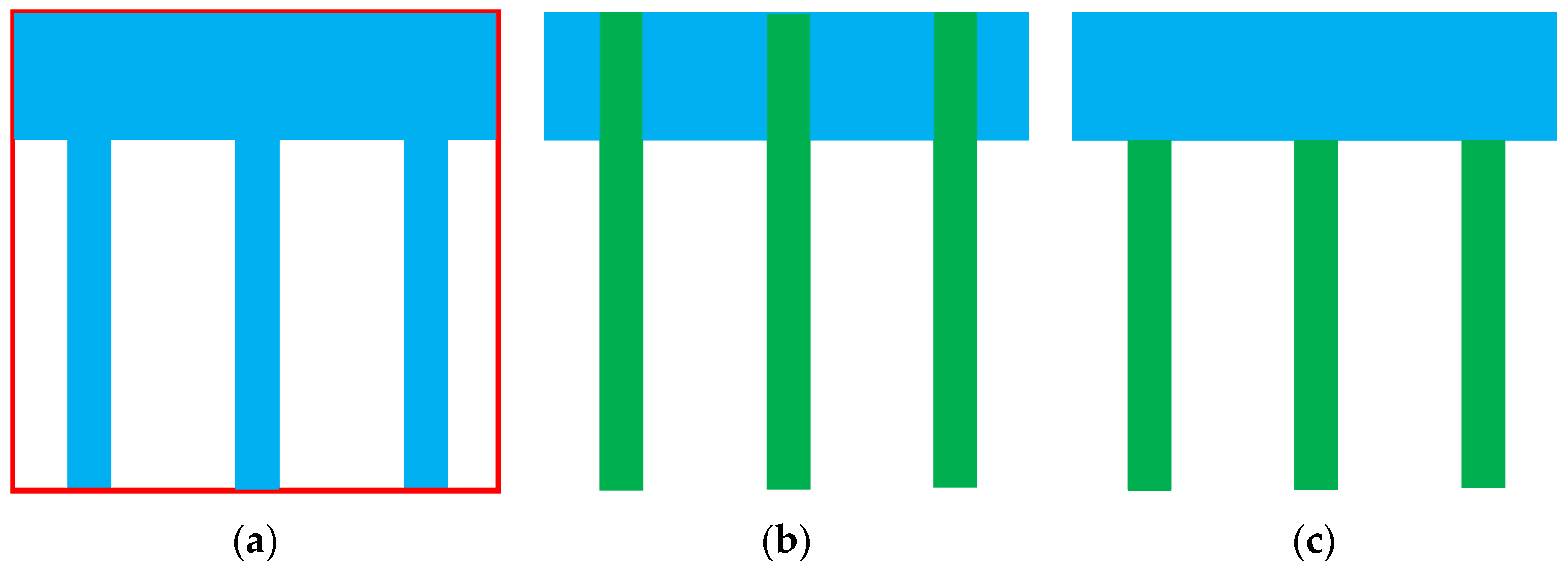
- Mitigation of fully or partially misclassified planar features: The conceptual basis of the implemented procedure to detect instances of such problem (as illustrated by Figure 4b,e) is that whenever planar features are either fully (Figure 4b) or partially (Figure 4e) misclassified, a significant portion of the encompassing Minimum Bounding Rectangle (MBR) will not be occupied by those features (refer to Figure 7a). In this regard, one should note that the MBR denotes the smallest area rectangle that encompasses the identified boundary of the planar region in question [46]. Therefore, to detect instances of such problem, we start by defining the MBR for the individual planar regions. Then, we evaluate the ration between the area of the planar region in question and the area of the encompassing MBR. Whenever this area is below a pre-defined threshold, we suspect that the planar feature in question might contain pole-like features, which will take the form of tentacles to the original planar region (as can be seen in Figure 7a). To identify such features, we perform a 2D-linear feature segmentation procedure, which is similar to the one proposed earlier with the exception that it is conducted in 2D rather than 3D (i.e., the line parameters would include slope, intercept, and width)—refer to Figure 7b. More specifically, pre-defined percentage of seed points are established. Then, a distance-based region growing is carried out to define seed regions with pre-set size. A 2D-PCA and line fitting procedure is conducted to identify seed regions that represent 2D lines. Those seed regions are then incorporated within a region-growing process that considers both the spatial closeness of the points and their normal distance to the fitted 2D lines. Following the 2D-line segmentation, an over-segmentation quality control is carried out to identify single linear features that have been identified as multiple ones. Moreover, the conducted QC in the previous step is implemented to identify partially misclassified linear features—i.e., the invading portion of the linear feature(s) (refer to Figure 7c). The QC measure for such problem is evaluated according to Equation (11), where represents the number of points within the planar feature that belong to 2D lines and is the total number of originally-segmented planar points. Lower percentage indicates fewer instances of such problem.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
3. Experimental Results
- Prove the feasibility of the proposed segmentation procedure in handling data with significant variation in LPD/LPS as well as inherent noise level,
- Prove the feasibility of the proposed segmentation procedure in handling data with different distribution and concentration of planar, pole-like, and rough regions,
- Prove the capability of the proposed QC procedure in detecting and quantifying instances of the hypothesized segmentation problems, and
- Prove the capability of the proposed QC procedure in mitigating instances of the hypothesized segmentation problems.
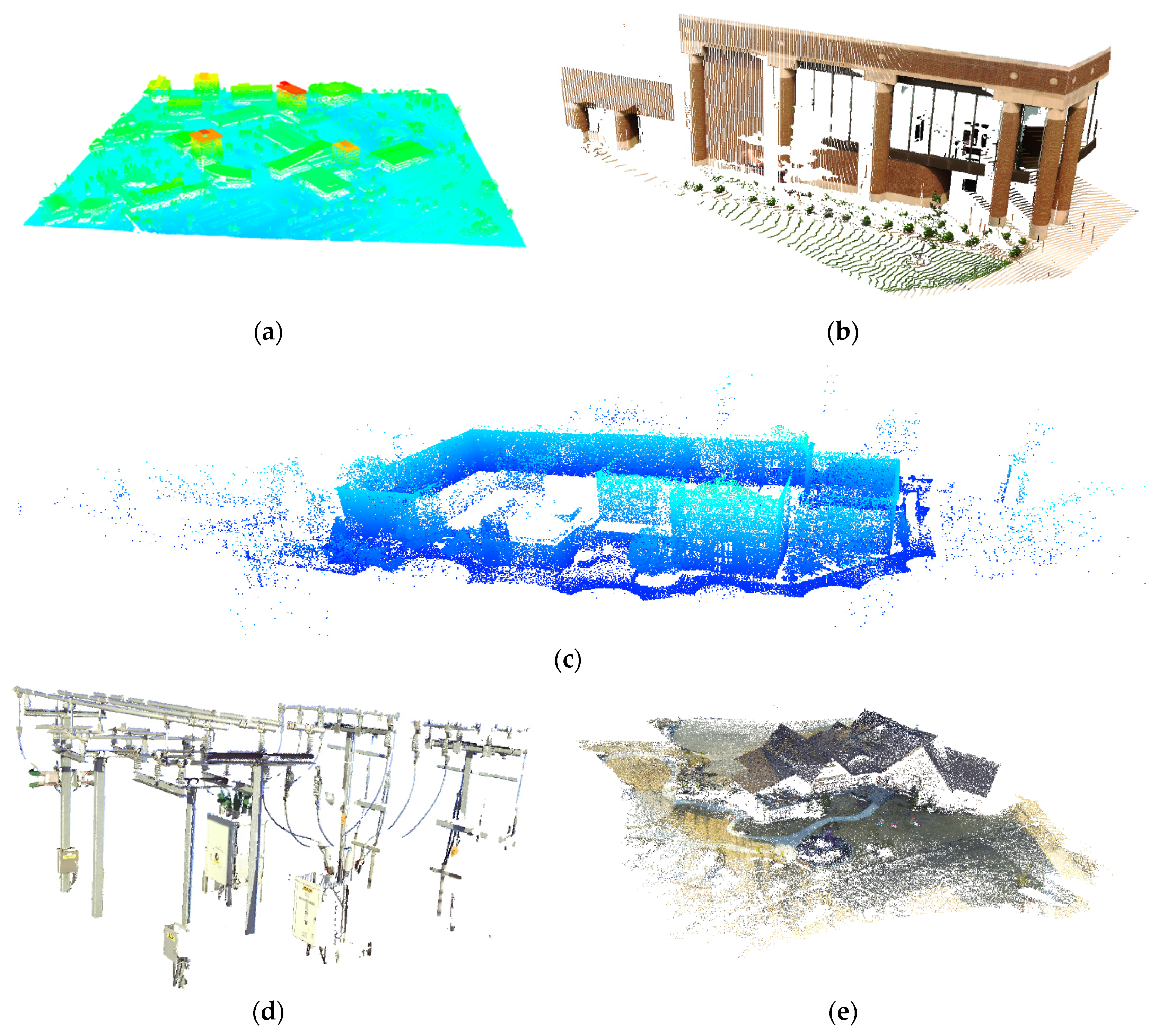
3.1. Datasets Description

3.2. Segmentation Results
| ALS | TLS1 | TLS2 | TLS3 | DIM | |
|---|---|---|---|---|---|
| Number of Points | 812,980 | 170,296 | 201,846 | 455,167 | 230,434 |
| Data Structuring and Characterization (mm:ss) | 08:15 | 01:48 | 02:02 | 06:57 | 02:34 |
| Segmentation Time (mm:ss) | 11:40 | 02:55 | 01:33 | 06:37 | 03:56 |
| Total Time (mm:ss) | 19:55 | 04:43 | 03:35 | 13:34 | 06:30 |

3.3. Quality Control Outcome
- For TLS1 and TLS3, which include significant number of pole-like features, a higher percentage of misclassified single pole-like features (QC1) is observed. TLS1 has pole-like features with larger radii. Therefore, there is higher probability that seed regions along cylindrical features with high point density are misclassified as planar ones. For TLS3, misclassified pole-like features are caused by having several thin beams in the dataset.
- For interclass competition for neighboring points (QC2), airborne datasets with predominance of planar features have higher percentage of —refer to the results for the ALS and DIM datasets. On the other hand, has higher percentages in datasets that have significant portions belonging to cylindrical features (i.e., TLS1 and TLS3).
- Due to inherent noise in the datasets as well as the strict normal distance thresholds as defined by the derived a-posteriori variance factor, over-segmentation problems (QC4) are present. In this regard, one should note that over-segmentation problems are easier to handle than under-segmentation ones, which could arise from relaxed normal-distance thresholds.
- Intraclass competition for neighboring points (QC4) are quite minimal. This is evident by the reported low percentages for this category.
- For partially/misclassified pole-like features, higher percentages of QC5 when dealing with low number of points in such classes is not an indication of a major issue in the segmentation procedure (e.g., QC5 for ALS and DIM where the percentages of the points that belong to pole-like feature are almost 0% and 4%, respectively).
- For partially/misclassified planar features, higher percentages of QC6 should be expected when dealing with datasets that have pole-like features with large radii or several interconnected linear features that are almost coplanar (this is the case for TLS1 and TLS3, respectively).


| ALS | TLS1 | TLS2 | TLS3 | DIM | ||
|---|---|---|---|---|---|---|
| / / | 101/ 716,628/ ≈0.000 | 5,439/ 123,370/ 0.044 | 402/ 126,193/ 0.003 | 25,484/ 224,635/ 0.113 | 71/ 211,553/ ≈0.000 | |
| Planar | / / | 31,700/ 96,453/ 0.328 | 5,457/ 52,365/ 0.104 | 2,788/ 76,055/ 0.036 | 24,469/ 256,016/ 0.095 | 3,991/ 18,952/ 0.210 |
| Pole-like | / / | 0/ 812,879/ 0 | 22,193/ 123,042/ 0.180 | 4,379/ 194,014/ 0.022 | 29,340/ 208,937/ 0.140 | 5,198/ 227,486/ 0.022 |
| Planar | / / | 618/ 801/ 0.771 | 23/ 59/ 0.389 | 278/ 367/ 0.757 | 8/ 86/ 0.093 | 163/ 195/ 0.835 |
| Pole-like | / / | 0/ 4/ 0 | 21/ 113/ 0.185 | 8/ 144/ 0.055 | 152/ 430/ 0.353 | 38/ 55/ 0.69 |
| / / | 21,690/ 748,227/ 0.028 | 857/ 123,388/ 0.006 | 4,521/ 128,579/ 0.035 | 5,427/ 223,620/ 0.024 | 3,381/ 215,473/ 0.015 | |
| / / | 101/ 101/ 1 | 5,841/ 69,447/ 0.084 | 1,866/ 12,211/ 0.152 | 9,748/ 275,570/ 0.035 | 3,427/ 8,146/ 0.420 | |
| / / | N/A | 29,647/ 123,388/ 0.240 | N/A | 73,187/ 223,620/ 0.327 | N/A |
4. Conclusions and Recommendations for Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gonzalez-Aguilera, D.; Crespo-Matellan, E.; Hernandez-Lopez, D.; Rodriguez-Gonzalvez, P. Automated urban analysis based on LiDAR-derived building models. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1844–1851. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Balali, V.; de la Garza, J.M. Segmentation and recognition of highway assets using image-based 3D point clouds and semantic Texton forests. J. Comput. Civ. Eng. 2012, 29, 04014023. [Google Scholar] [CrossRef]
- Alshawabkeh, Y.; Haala, N. Integration of digital photogrammetry and laser scanning for heritage documentation. Int. Arch. Photogramm. Remote Sens. 2004, 35, B5. [Google Scholar]
- Gruen, A. Development and status of image matching in photogrammetry. Photogramm. Rec. 2012, 27, 36–57. [Google Scholar] [CrossRef]
- Pratt, W.K. Digital Image Processing; Wiley: New, York, NY, USA, 1978. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Ballard, D.H. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recognit. 1981, 13, 111–122. [Google Scholar] [CrossRef]
- Hirschmüller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR ’05), San Diego, CA, USA, 20–25 June 2005; pp. 807–814.
- Hirschmüller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Haala, N. The landscape of dense image matching algorithms. In Photogrammetric Week’ 13; Fritsch, D., Ed.; Wichmann: Stuttgart, Germany, 2013; pp. 271–284. [Google Scholar]
- Hyyppä, J.; Wagner, W.; Hollaus, M.; Hyyppä, H. Airborne laser scanning. In SAGE Handbook of Remote Sensing; SAGE: New York, NY, USA, 2009; pp. 199–211. [Google Scholar]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Liu, X. Airborne LiDAR for DEM generation: Some critical issues. Prog. Phys. Geogr. 2008, 32, 31–49. [Google Scholar]
- Habib, A.F.; Zhai, R.; Kim, C. Generation of complex polyhedral building models by integrating stereo-aerial imagery and lidar data. Photogramm. Eng. Remote Sens. 2010, 76, 609–623. [Google Scholar] [CrossRef]
- Kwak, E.; Habib, A. Automatic representation and reconstruction of DBM from LiDAR data using Recursive Minimum Bounding Rectangle. ISPRS J. Photogramm. Remote Sens. 2014, 93, 171–191. [Google Scholar] [CrossRef]
- El-Halawany, S.; Moussa, A.; Lichti, D.D.; El-Sheimy, N. Detection of road curb from mobile terrestrial laser scanner point cloud. In Proceedings of the ISPRS Workshop on Laserscanning, Calgary, AB, Canada, 29–31 August 2011.
- Qiu, R.; Zhou, Q.-Y.; Neumann, U. Pipe-Run Extraction and Reconstruction from Point Clouds. In Computer Vision–ECCV 2014; Springer: Cham, Switzerland, 2014; pp. 17–30. [Google Scholar]
- Son, H.; Kim, C.; Kim, C. Fully automated as-built 3D pipeline extraction method from laser-scanned data based on curvature computation. J. Comput. Civ. Eng. 2014, 29, B4014003. [Google Scholar] [CrossRef]
- Becker, S.; Haala, N. Grammar supported facade reconstruction from mobile lidar mapping. In Proceedings of the ISPRS Workshop, CMRT09-City Models, Roads and Traffic, Paris, France, 3–4 September 2009.
- Dimitrov, A.; Golparvar-Fard, M. Segmentation of building point cloud models including detailed architectural/structural features and MEP systems. Autom. Constr. 2015, 51, 32–45. [Google Scholar] [CrossRef]
- Rottensteiner, F.; Briese, C. A new method for building extraction in urban areas from high-resolution LIDAR data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 295–301. [Google Scholar]
- Forlani, G.; Nardinocchi, C.; Scaioni, M.; Zingaretti, P. Complete classification of raw LIDAR data and 3D reconstruction of buildings. Pattern Anal. Appl. 2006, 8, 357–374. [Google Scholar] [CrossRef]
- Vosselman, G.; Gorte, B.G.; Sithole, G.; Rabbani, T. Recognising structure in laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 46, 33–38. [Google Scholar]
- Rabbani, T.; van den Heuvel, F.; Vosselmann, G. Segmentation of point clouds using smoothness constraint. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 248–253. [Google Scholar]
- Al-Durgham, M.; Habib, A. A framework for the registration and segmentation of heterogeneous lidar data. Photogramm. Eng. Remote Sens. 2013, 79, 135–145. [Google Scholar] [CrossRef]
- Yang, B.; Dong, Z. A shape-based segmentation method for mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2013, 81, 19–30. [Google Scholar] [CrossRef]
- Wang, J.; Shan, J. Segmentation of LiDAR point clouds for building extraction. In Proceedings of the American Society for Photogrammetry and Remote Sensing Annual Conference, Baltimore, MD, USA, 9–13 March 2009; pp. 9–13.
- Awwad, T.M.; Zhu, Q.; Du, Z.; Zhang, Y. An improved segmentation approach for planar surfaces from unstructured 3D point clouds. Photogramm. Rec. 2010, 25, 5–23. [Google Scholar] [CrossRef]
- Lari, Z.; Habib, A. An adaptive approach for the segmentation and extraction of planar and linear/cylindrical features from laser scanning data. ISPRS J. Photogramm. Remote Sens. 2014, 93, 192–212. [Google Scholar] [CrossRef]
- Filin, S.; Pfeifer, N. Segmentation of airborne laser scanning data using a slope adaptive neighborhood. ISPRS J. Photogramm. Remote Sens. 2006, 60, 71–80. [Google Scholar] [CrossRef]
- Haralock, R.M.; Shapiro, L.G. Computer and Robot Vision; Addison-Wesley Longman Publishing Co., Inc.: Boston, MA, USA, 1991. [Google Scholar]
- Biosca, J.M.; Lerma, J.L. Unsupervised robust planar segmentation of terrestrial laser scanner point clouds based on fuzzy clustering methods. ISPRS J. Photogramm. Remote Sens. 2008, 63, 84–98. [Google Scholar] [CrossRef]
- Pu, S.; Vosselman, G. Automatic extraction of building features from terrestrial laser scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 25–27. [Google Scholar]
- Heipke, C.; Mayer, H.; Wiedemann, C.; Jamet, O. Evaluation of automatic road extraction. Int. Arch. Photogramm. Remote Sens. 1997, 32, 151–160. [Google Scholar]
- Rutzinger, M.; Rottensteiner, F.; Pfeifer, N. A comparison of evaluation techniques for building extraction from airborne laser scanning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2009, 2, 11–20. [Google Scholar] [CrossRef]
- Belton, D. Classification and Segmentation of 3D Terrestrial Laser Scanner Point Clouds. Ph.D. Thesis, Curtin University of Technology, Bentley, Australia, 2008. [Google Scholar]
- Nurunnabi, A.; Belton, D.; West, G. Robust segmentation for multiple planar surface extraction in laser scanning 3D point cloud data. In Proceedings of the IEEE 2012 21st International Conference on Pattern Recognition (ICPR), Tsukuba, Japan, 11–15 November 2012; pp. 1367–1370.
- Lari, Z.; Habib, A. New approaches for estimating the local point density and its impact on LiDAR data segmentation. Photogramm. Eng. Remote Sens. 2013, 79, 195–207. [Google Scholar] [CrossRef]
- Shewchuk, J.R. Triangle: Engineering a 2D quality mesh generator and Delaunay triangulator. In Applied Computational Geometry towards Geometric Engineering; Springer: Berlin, Germany; Heidelberg, Germany, 1996; pp. 203–222. [Google Scholar]
- Priestnall, G.; Jaafar, J.; Duncan, A. Extracting urban features from LiDAR digital surface models. Comput. Environ. Urban Syst. 2000, 24, 65–78. [Google Scholar] [CrossRef]
- Reitberger, J.; Schnörr, C.; Krzystek, P.; Stilla, U. 3D segmentation of single trees exploiting full waveform LIDAR data. ISPRS J. Photogramm. Remote Sens. 2009, 64, 561–574. [Google Scholar] [CrossRef]
- Bentley, J.L. Multidimensional binary search trees used for associative searching. Commun. ACM 1975, 18, 509–517. [Google Scholar] [CrossRef]
- Moore, I.D.; Grayson, R.B.; Ladson, A.R. Digital terrain modelling: A review of hydrological, geomorphological, and biological applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Pulli, K.; Duchamp, T.; Hoppe, H.; McDonald, J.; Shapiro, L.; Stuetzle, W. Robust meshes from multiple range maps. In Proceedings of the IEEE International Conference on Recent Advances in 3-D Digital Imaging and Modeling, Ottawa, ON, Canada, 12–15 May 1997; p. 205.
- Shaw, P.J. Multivariate Statistics for the Environmental Sciences; Arnold: London, UK, 2003. [Google Scholar]
- He, F.; Habib, A. Linear Approach for Initial Recovery of the Exterior Orientation Parameters of Randomly Captured Images by Low-Cost Mobile Mapping Systems. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 1, 149–154. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habib, A.; Lin, Y.-J. Multi-Class Simultaneous Adaptive Segmentation and Quality Control of Point Cloud Data. Remote Sens. 2016, 8, 104. https://doi.org/10.3390/rs8020104
Habib A, Lin Y-J. Multi-Class Simultaneous Adaptive Segmentation and Quality Control of Point Cloud Data. Remote Sensing. 2016; 8(2):104. https://doi.org/10.3390/rs8020104
Chicago/Turabian StyleHabib, Ayman, and Yun-Jou Lin. 2016. "Multi-Class Simultaneous Adaptive Segmentation and Quality Control of Point Cloud Data" Remote Sensing 8, no. 2: 104. https://doi.org/10.3390/rs8020104
APA StyleHabib, A., & Lin, Y.-J. (2016). Multi-Class Simultaneous Adaptive Segmentation and Quality Control of Point Cloud Data. Remote Sensing, 8(2), 104. https://doi.org/10.3390/rs8020104