
Tropical Peatland Burn Depth and Combustion Heterogeneity Assessed Using UAV Photogrammetry and Airborne LiDAR

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
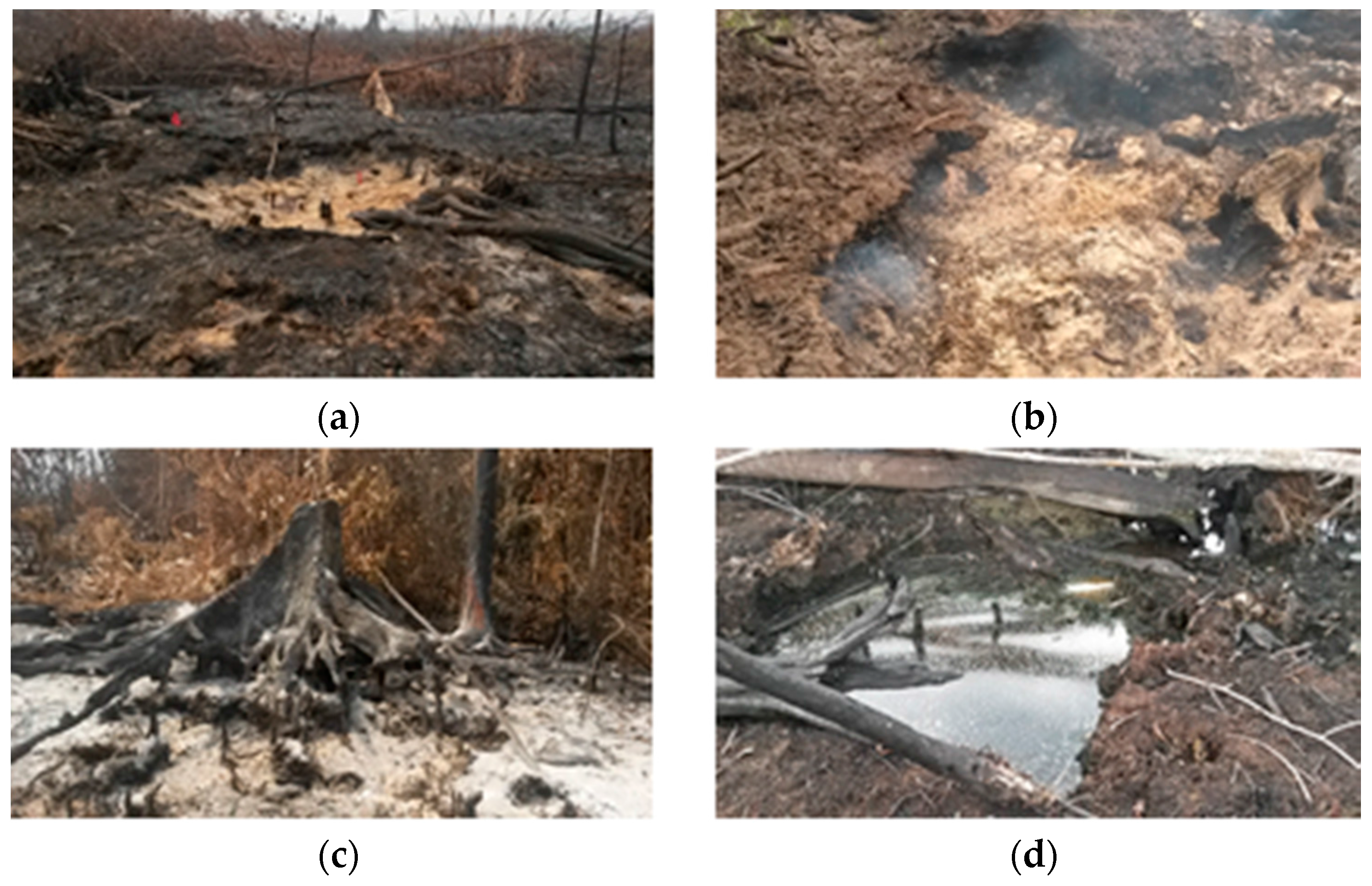
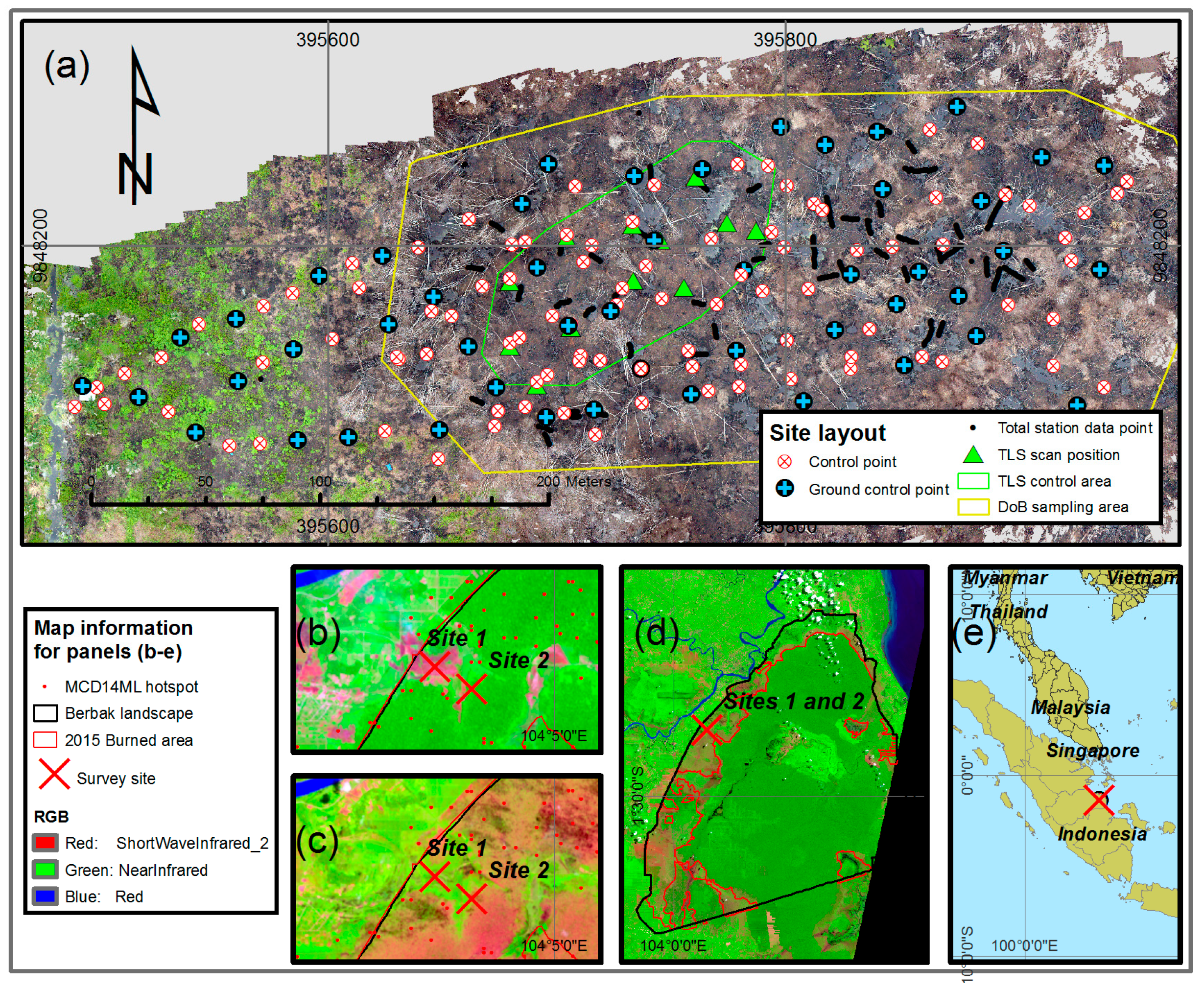
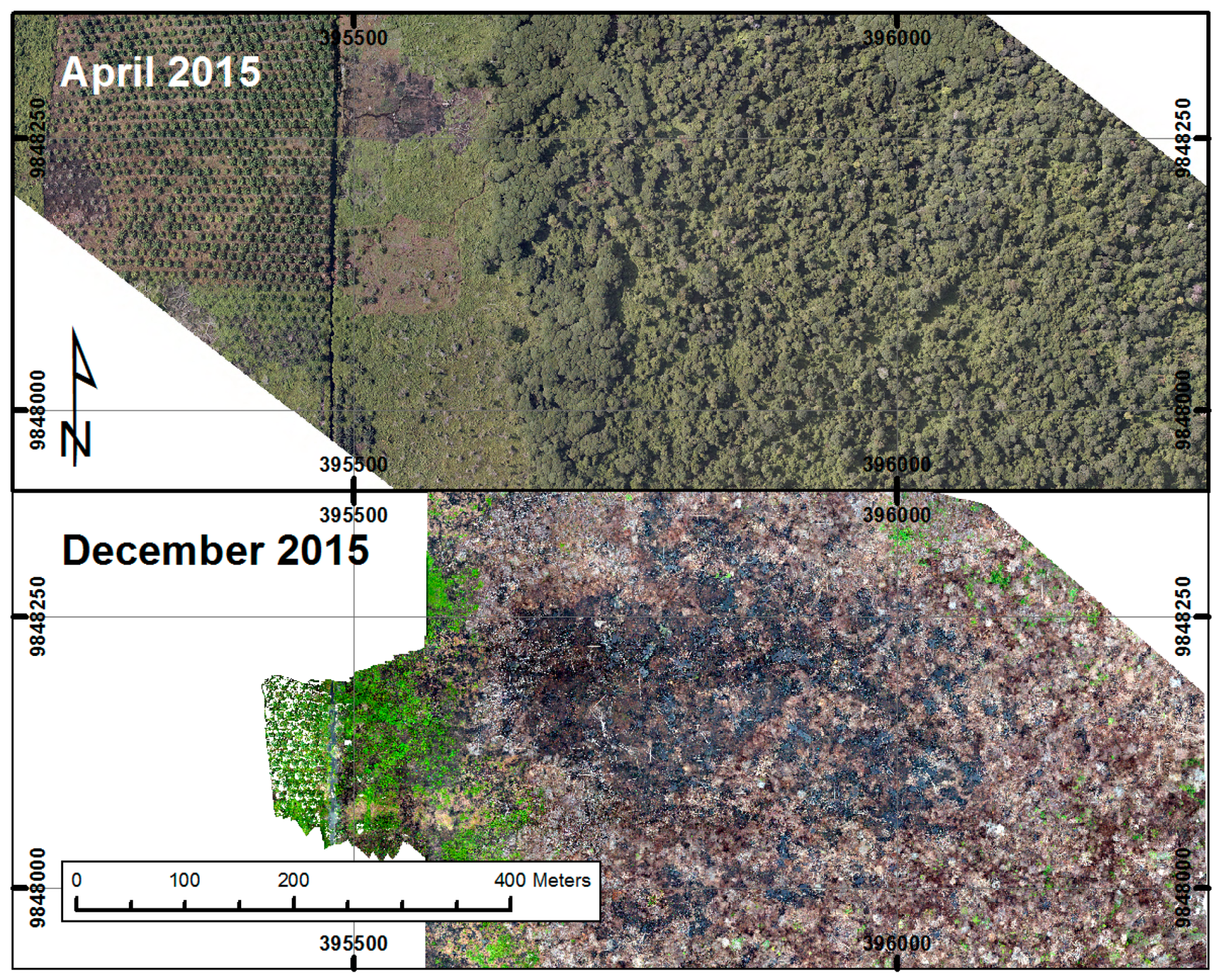
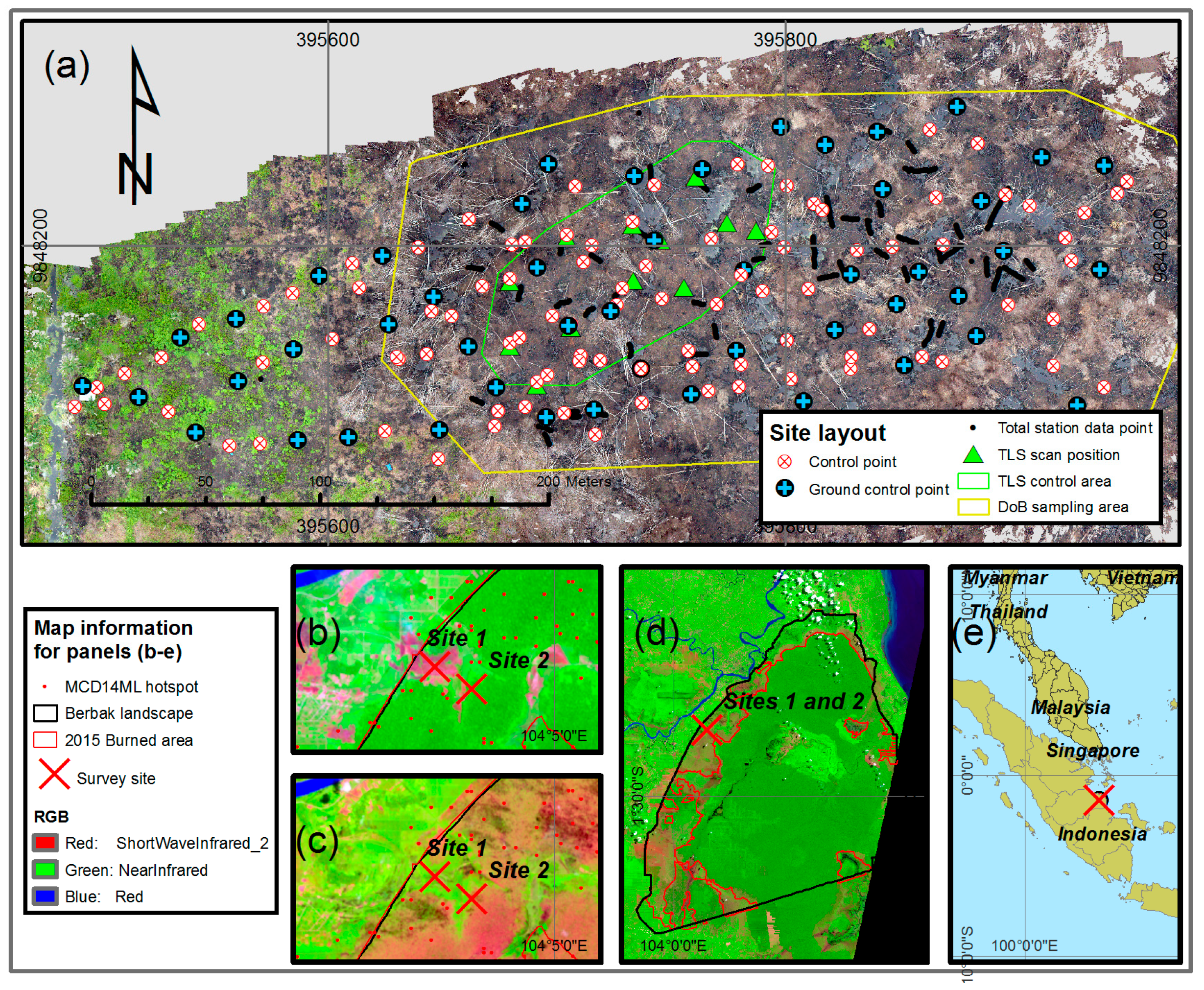
2.1. Sites
2.2. Data Collection
2.2.1. Airborne LiDAR Survey
2.2.2. UAV System
2.3. Data Processing
2.3.1. Burn Heterogeneity Assessment (Site 1)
2.3.2. DTM Production (Site 2)
2.3.3. DoB Accuracy Assessments
2.3.4. Peat Depth of Burn from DTMs
3. Accuracy Assessment Results
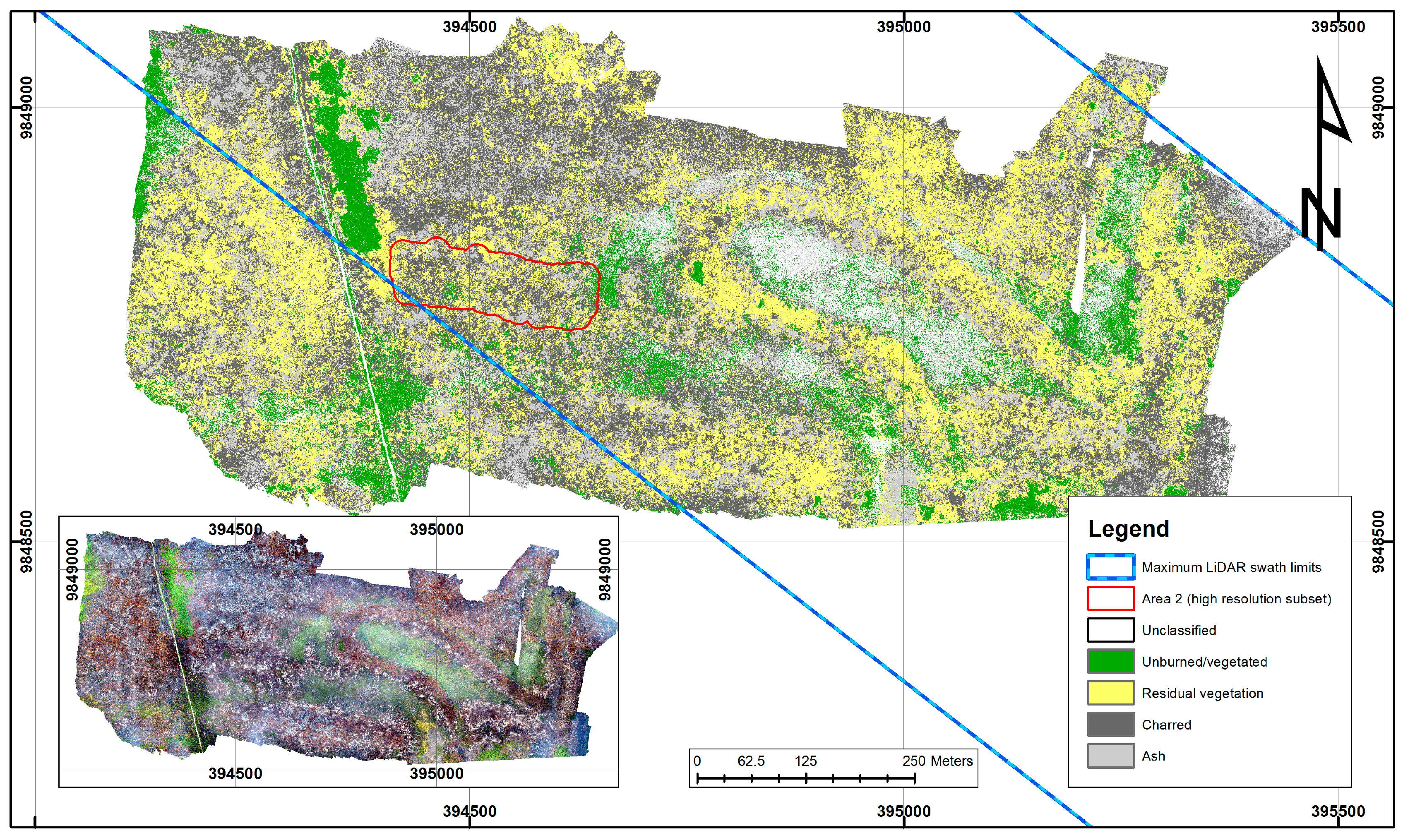
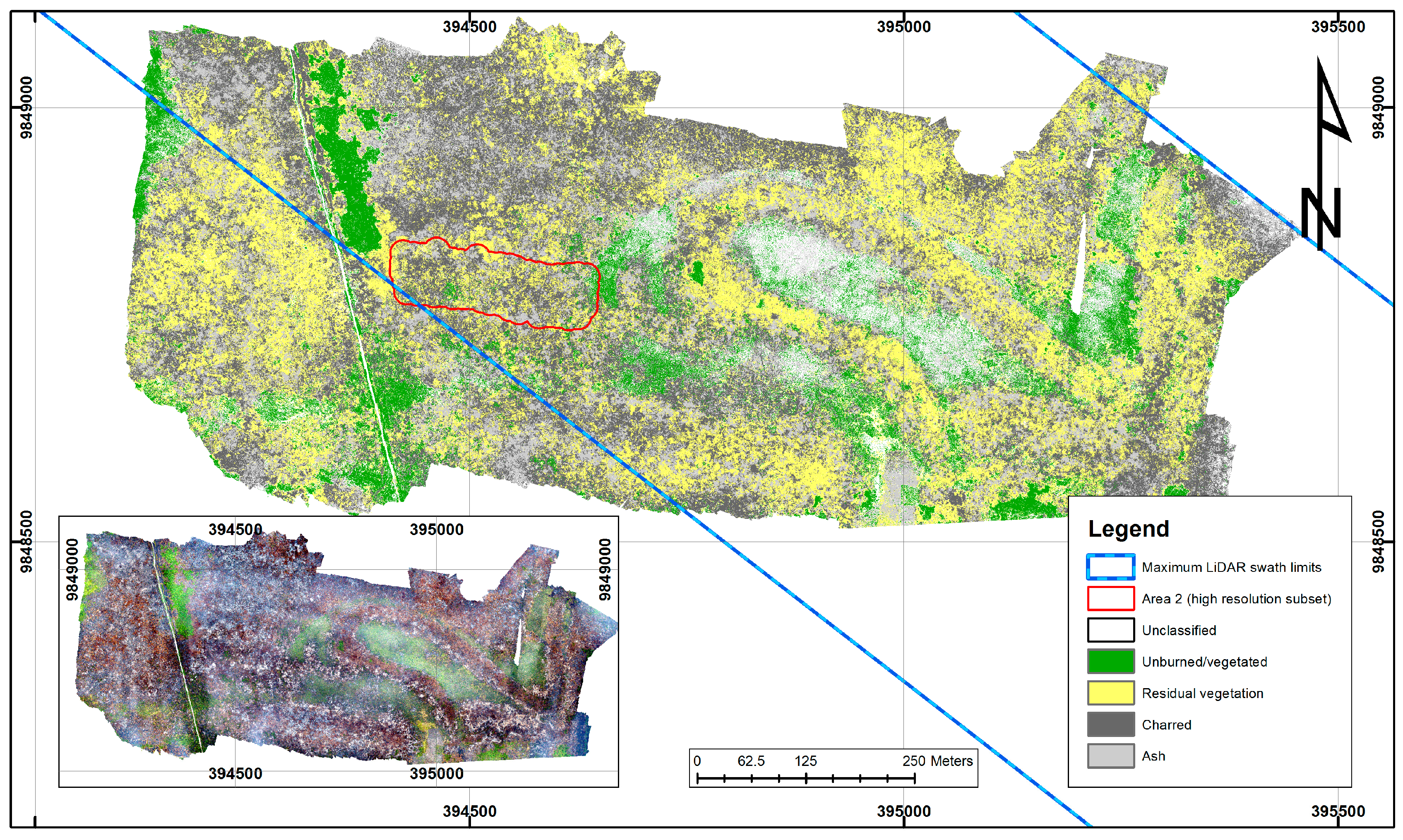
3.1. Classification of Optical UAV and Airborne LiDAR Datasets (Site 1 Only)
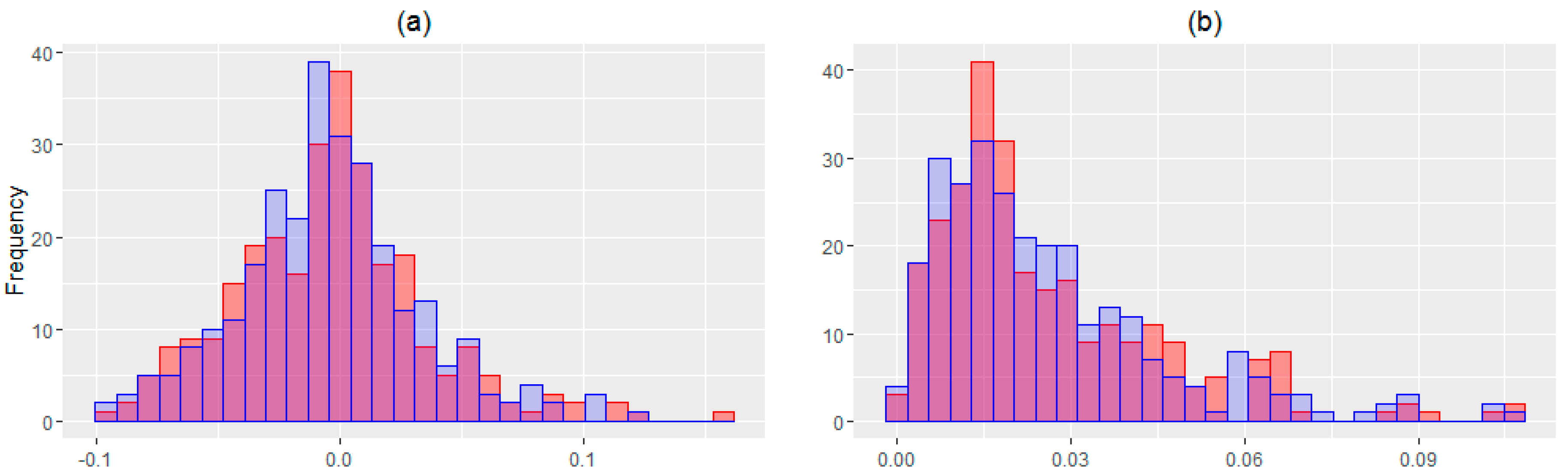
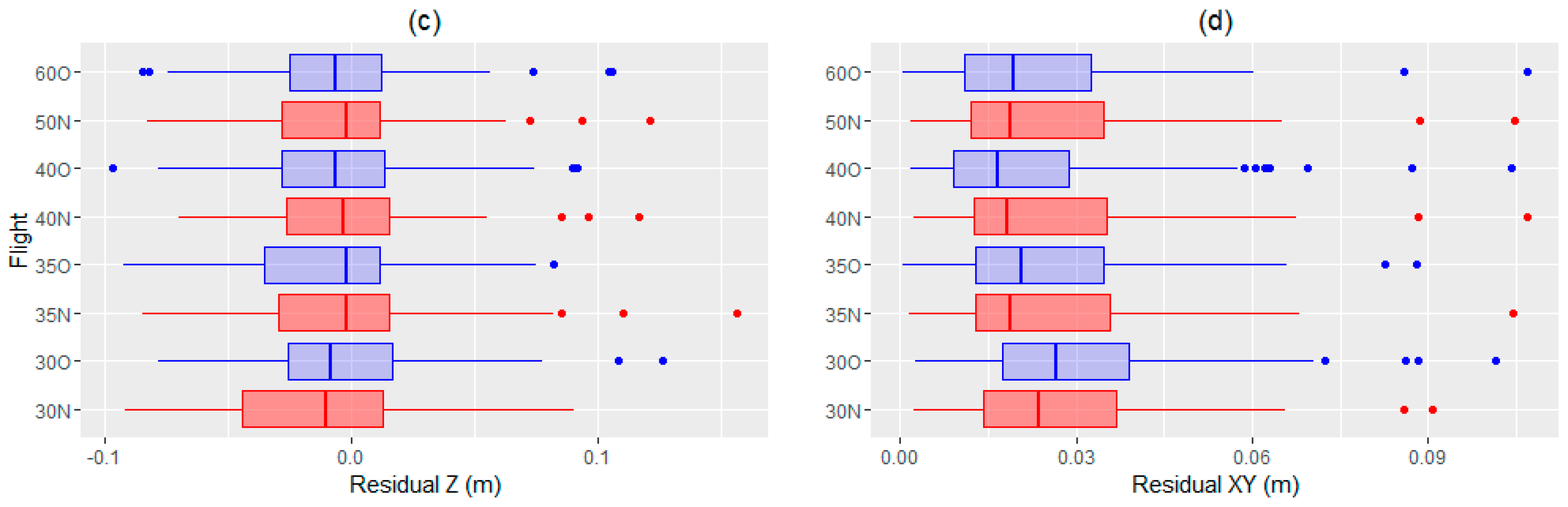
3.2. DTMUAV Accuracy Assessments
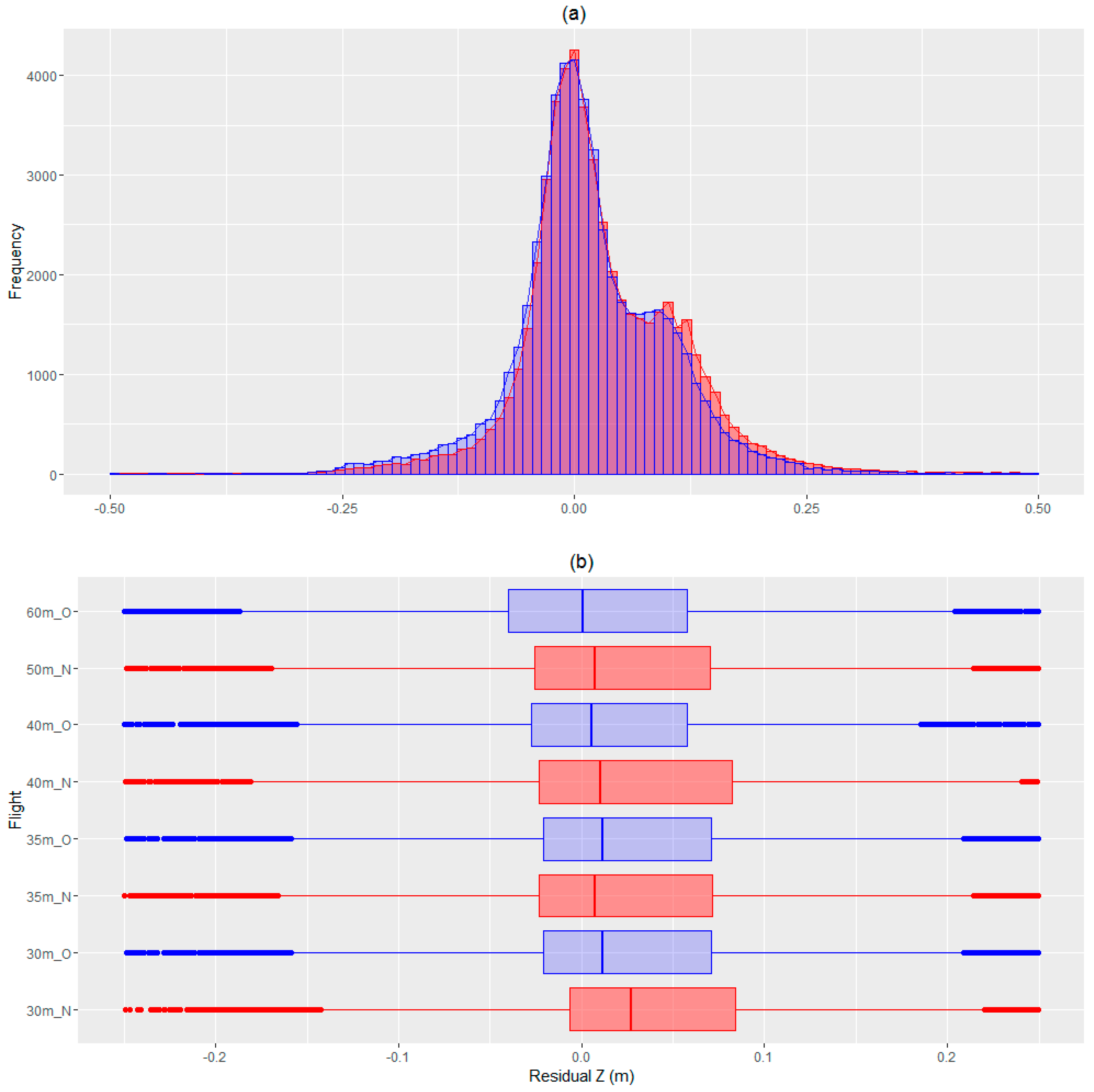
3.3. DTMIDW Accuracy Assessment
3.4. DTMUAV Accuracy under Water
4. DoB and Combustion Heterogeneity Analysis Results
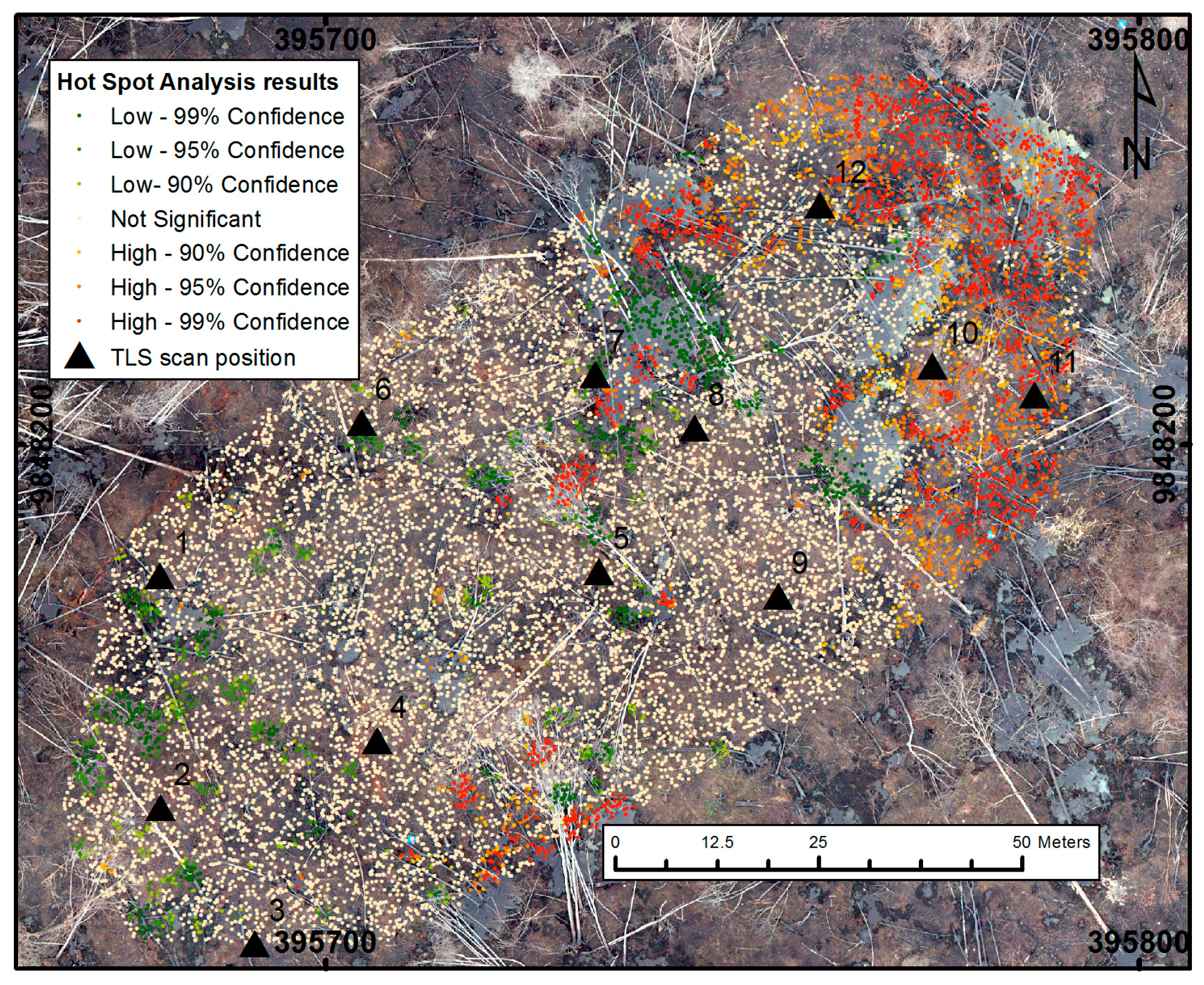
4.1. Combustion Heterogeneity (Site 1)
4.2. DoB Estimates
5. Emissions Estimates
Method for Calculating Emissions Estimates
6. Discussion
7. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Page, S.E.; Siegert, F.; Rieley, J.O.; Boehm, H.-D.V.; Jaya, A.; Limin, S. The amount of carbon released from peat and forest fires in Indonesia during 1997. Nature 2002, 420, 61–65. [Google Scholar] [CrossRef] [PubMed]
- Van der Werf, G.R.; Randerson, J.T.; Giglio, L.; Collatz, G.J.; Mu, M.; Kasibhatla, P.S.; Morton, D.C.; DeFries, R.S.; Jin, Y.; van Leeuwen, T.T. Global fire emissions and the contribution of deforestation, savanna, forest, agricultural, and peat fires (1997–2009). Atmos. Chem. Phys. 2010, 10, 11707–11735. [Google Scholar] [CrossRef]
- Huijnen, V.; Wooster, M.J.; Kaiser, J.W.; Gaveau, D.L.A.; Flemming, J.; Parrington, M.; Inness, A.; Murdiyarso, D.; Main, B.; van Weele, M. Fire carbon emissions over maritime southeast Asia in 2015 largest since 1997. Sci. Rep. 2016, 6, 26886. [Google Scholar] [CrossRef] [PubMed]
- Usup, A.; Hashimoto, Y.; Takahashi, H.; Hayasaka, H. Combustion and thermal characteristics of peat fire in tropical peatland in Central Kalimantan, Indonesia. Tropics 2004, 14, 1–19. [Google Scholar] [CrossRef]
- Rein, G. Smouldering Fires and Natural Fuels. In Fire Phenomena and the Earth System; Belcher, C.M., Ed.; John Wiley & Sons: Oxford, UK, 2013; pp. 15–33. [Google Scholar]
- Davies, G.M.; Gray, A.; Rein, G.; Legg, C.J. Peat consumption and carbon loss due to smouldering wildfire in a temperate peatland. For. Ecol. Manag. 2013, 308, 169–177. [Google Scholar] [CrossRef]
- Ashton, C.; Rein, G.; Dios, J.D.; Torero, J.L.; Legg, C.; Davies, M.; Gray, A. Experiments and Observation of Peat Smouldering Fires. In Proceedings of the International Meeting of Fire Effects on Soil Properties, Barcelona, Spain, 31 January–3 February 2007.
- Rein, G.; Cleaver, N.; Ashton, C.; Pironi, P.; Torero, J.L. The severity of smouldering peat fires and damage to the forest soil. Catena 2008, 74, 304–309. [Google Scholar] [CrossRef]
- Ballhorn, U.; Siegert, F.; Mason, M.; Limin, S. Derivation of burn scar depths and estimation of carbon emissions with LiDAR in Indonesian peatlands. Proc. Natl. Acad. Sci. USA 2009, 106, 21213–21218. [Google Scholar] [CrossRef] [PubMed]
- Global Forest Observations Initiative. Integrating Remote-Sensing and Ground-Based Observations for Estimation of Emissions and Removals of Greenhouse Gases in Forests: Methods and Guidance from the Global Forest Observations Initiative; Group on Earth Observations: Geneva, Switzerland, 2014. [Google Scholar]
- Hiraishi, T.; Krug, T.; Tanabe, K.; Srivastava, N.; Jamsranjav, B.; Fukuda, M.; Troxler, T. 2013 Supplement to the 2006 IPCC Guidelines for National Greenhouse Gas Inventories: Wetlands; Intergovernmental Panel on Climate Change (IPCC): Geneva, Switzerland, 2014. [Google Scholar]
- Hooijer, A.; Page, S.; Jauhiainen, J.; Lee, W.A.; Lu, X.X.; Idris, A.; Anshari, G. Subsidence and carbon loss in drained tropical peatlands. Biogeosciences 2012, 9, 1053–1071. [Google Scholar] [CrossRef]
- Mazher, A. Comparative analysis of mapping burned areas from Landsat TM images. J. Phys. Conf. Ser. 2013, 439, 12038. [Google Scholar] [CrossRef]
- Gaveau, D.L.A.; Salim, M.A.; Hergoualc’h, K.; Locatelli, B.; Sloan, S.; Wooster, M.; Marlier, M.E.; Molidena, E.; Yaen, H.; DeFries, R.; et al. Major atmospheric emissions from peat fires in Southeast Asia during non-drought years: Evidence from the 2013 Sumatran fires. Sci. Rep. 2014, 4, 6112. [Google Scholar] [CrossRef] [PubMed]
- Konecny, K.; Ballhorn, U.; Navratil, P.; Jubanski, J.; Page, S.E.; Tansey, K.; Hooijer, A.; Vernimmen, R.; Siegert, F. Variable carbon losses from recurrent fires in drained tropical peatlands. Glob. Chang. Biol. 2016, 22, 1469–1480. [Google Scholar] [CrossRef] [PubMed]
- Reddy, A.D.; Hawbaker, T.J.; Wurster, F.; Zhu, Z.; Ward, S.; Newcomb, D.; Murray, R. Quantifying soil carbon loss and uncertainty from a peatland wildfire using multi-temporal LiDAR. Remote Sens. Environ. 2015, 170, 306–316. [Google Scholar] [CrossRef]
- Turetsky, M.R.; Wieder, R.K. A direct approach to quantifying organic matter lost as a result of peatland wildfire. Can. J. For. Res. 2001, 31, 363–366. [Google Scholar] [CrossRef]
- Benscoter, B.W.; Wieder, R.K. Variability in organic matter lost by combustion in a boreal bog during the 2001 Chisholm fire. Can. J. For. Res. 2003, 33, 2509–2513. [Google Scholar] [CrossRef]
- Benscoter, B.W.; Thompson, D.K.; Waddington, J.M.; Flannigan, M.D.; Wotton, B.M.; de Groot, W.J.; Turetsky, M.R. Interactive effects of vegetation, soil moisture and bulk density on depth of burning of thick organic soils. Int. J. Wildland Fire 2011, 20, 418–429. [Google Scholar] [CrossRef]
- Turetsky, M.R.; Donahue, W.F.; Benscoter, B.W. Experimental drying intensifies burning and carbon losses in a northern peatland. Nat. Commun. 2011, 2, 514. [Google Scholar] [CrossRef] [PubMed]
- Veloo, R.; Paramananthan, S.; Van Ranst, E. Classification of tropical lowland peats revisited: The case of Sarawak. Catena 2014, 118, 179–185. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2015, 40, 247–275. [Google Scholar] [CrossRef]
- Sona, G.; Pinto, L.; Pagliari, D.; Passoni, D.; Gini, R. Experimental analysis of different software packages for orientation and digital surface modelling from UAV images. Earth Sci. Inform. 2014, 7, 97–107. [Google Scholar] [CrossRef]
- Rock, G.; Ries, J.B.; Udelhoven, T. Sensitivity Analysis of Uav-Photogrammetry for Creating Digital Elevation Models (dem). In Proceedings of the International Conference on Unmanned Aerial Vehicle in Geomatics (uav-G), Zurich, Switzerland, 14–16 September 2011.
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G.; Graham, D.J.; Labadz, J.C. The potential of small unmanned aircraft systems and structure-from-motion for topographic surveys: A test of emerging integrated approaches at Cwm Idwal, North Wales. Geomorphology 2014, 226, 35–43. [Google Scholar] [CrossRef]
- Woodget, A.S.; Carbonneau, P.E.; Visser, F.; Maddock, I.P. Quantifying submerged fluvial topography using hyperspatial resolution UAS imagery and structure from motion photogrammetry: Submerged fluvial topography from uas imagery and SfM. Earth Surf. Process. Landf. 2015, 40, 47–64. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the Accuracy of Georeferenced Point Clouds Produced via Multi-View Stereopsis from Unmanned Aerial Vehicle (UAV) Imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Zoological Society of London Berbak Carbon Initiative: Harnessing Carbon to Conserve Biodiversity. Available online: http://static.zsl.org/files/berbak-info-sheet-may-2010-1113.pdf (accessed on 30 November 2016).
- Elz, I.; Tansey, K.; Page, S.E.; Trivedi, M. Modelling Deforestation and Land Cover Transitions of Tropical Peatlands in Sumatra, Indonesia Using Remote Sensed Land Cover Data Sets. Land 2015, 4, 670–687. [Google Scholar] [CrossRef]
- Murdiyarso, D.; Widodo, M.; Suyamto, D. Fire risks in forest carbon projects in Indonesia. Sci. Chin. Ser. C Life Sci. Engl. Ed. 2002, 45, 65–74. [Google Scholar]
- Warren, M.W.; Kauffman, J.B.; Murdiyarso, D.; Anshari, G.; Hergoualc’h, K.; Kurnianto, S.; Purbopuspito, J.; Gusmayanti, E.; Afifudin, M.; Rahajoe, J.; et al. A cost-efficient method to assess carbon stocks in tropical peat soil. Biogeosciences 2012, 9, 4477–4485. [Google Scholar] [CrossRef]
- Stolle, F.; Chomitz, K.M.; Lambin, E.F.; Tomich, T.P. Land use and vegetation fires in Jambi Province, Sumatra, Indonesia. For. Ecol. Manag. 2003, 179, 277–292. [Google Scholar] [CrossRef]
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An Enhanced Contextual Fire Detection Algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Ouédraogo, M.M.; Degré, A.; Debouche, C.; Lisein, J. The evaluation of unmanned aerial system-based photogrammetry and terrestrial laser scanning to generate DEMs of agricultural watersheds. Geomorphology 2014, 214, 339–355. [Google Scholar] [CrossRef]
- Martin, I. LAStools—Efficient Tools for LiDAR Processing; rapidlasso GmbH: Gilching, Germany, 2016. [Google Scholar]
- Montealegre, A.L.; Lamelas, M.T.; de la Riva, J. A Comparison of Open-Source LiDAR Filtering Algorithms in a Mediterranean Forest Environment. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 4072–4085. [Google Scholar] [CrossRef]
- Khosravipour, A.; Skidmore, A.K.; Isenburg, M. Generating spike-free digital surface models using LiDAR raw point clouds: A new approach for forestry applications. Int. J. Appl. Earth Observ. Geoinf. 2016, 52, 104–114. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Seiler, W.; Crutzen, P.J. Estimates of gross and net fluxes of carbon between the biosphere and the atmosphere from biomass burning. Clim. Chang. 1980, 2, 207–247. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Estimating plot-level tree heights with LiDAR: Local filtering with a canopy-height based variable window size. Comput. Electr. Agric. 2002, 37, 71–95. [Google Scholar] [CrossRef]
- Clark, M.L.; Clark, D.B.; Roberts, D.A. Small-footprint LiDAR estimation of sub-canopy elevation and tree height in a tropical rain forest landscape. Remote Sens. Environ. 2004, 91, 68–89. [Google Scholar] [CrossRef]
- Töyrä, J.; Pietroniro, A.; Hopkinson, C.; Kalbfleisch, W. Assessment of airborne scanning laser altimetry (LiDAR) in a deltaic wetland environment. Can. J. Remote Sens. 2003, 29, 718–728. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site Number | Land Cover | Active Fire Detection Date | Pre-Fire Vegetation | Mean/Max Vegetation Height (m) | Area (ha) |
|---|---|---|---|---|---|
| 1 | Shrub | 17–26 August 2015 | Ferns, few short trees | 2/20 | 58.4 |
| 2 | Forest | 4 October 2015 | Degraded peat swamp forest | 11/43 | 5.2 |
| Flight Name | Flight Altitude (m) | Total Images | Route Spacing (m) | Shooting Distance (m) | Horizontal Speed (m·s−1) |
|---|---|---|---|---|---|
| 30 m_O | 36 | 1173 | 8 | 5 | 5 |
| 30 m_N | 34 | 1176 | 8 | 5 | 5 |
| 35 m_O | 37 | 976 | 9 | 6 | 6 |
| 35 m_N | 39 | 1358 | 9 | 6 | 6 |
| 40 m_O | 44 | 1086 | 10.5 | 7 | 7 |
| 40 m_N | 42 | 1125 | 10.5 | 7 | 7 |
| 50 m_N | 50 | 959 | 13 | 9 | 9 |
| 60 m_O | 70 | 814 | 16 | 10.5 | 10 |
| GNSS Control Point Comparison (vs. DTMUAV) | ||||||||||
| XY (m) | Z (m) | XYZ (m) | ||||||||
| Flight ID | Number of Points | Bias (m) | St Dev (m) | RMSE (m) | Bias (m) | St Dev (m) | RMSE (m) | Bias (m) | St dev (m) | RMSE (m) |
| 30 m_N | 58 | 0.028 | 0.020 | 0.034 | −0.012 | 0.041 | 0.043 | 0.049 | 0.024 | 0.054 |
| 30 m_O | 68 | 0.032 | 0.022 | 0.038 | −0.001 | 0.038 | 0.038 | 0.047 | 0.027 | 0.054 |
| 35 m_N | 75 | 0.026 | 0.020 | 0.033 | −0.001 | 0.042 | 0.042 | 0.044 | 0.029 | 0.053 |
| 35 m_O | 69 | 0.025 | 0.018 | 0.031 | −0.009 | 0.039 | 0.040 | 0.043 | 0.026 | 0.051 |
| 40 m_N | 72 | 0.026 | 0.021 | 0.031 | −0.004 | 0.038 | 0.038 | 0.043 | 0.027 | 0.051 |
| 40 m_O | 74 | 0.023 | 0.020 | 0.030 | −0.005 | 0.037 | 0.037 | 0.040 | 0.027 | 0.048 |
| 50 m_N | 71 | 0.025 | 0.020 | 0.032 | −0.003 | 0.037 | 0.037 | 0.041 | 0.026 | 0.049 |
| 60 m_O | 69 | 0.025 | 0.020 | 0.032 | −0.003 | 0.036 | 0.036 | 0.040 | 0.027 | 0.048 |
| TLS Data Comparison | ||||||||||
| CloudUAV to DTMTLS Comparison | DTMUAV to DTMTLS Comparison | |||||||||
| Flight ID | Number of Points | Bias (m) | St Dev (m) | RMSD (m) | Number of Points | Bias (m) | St Dev (m) | RMSE (m) | Overall RMSE (m) | |
| 30 m_N | 296,401 | −0.022 | 0.104 | 0.106 | 13,703 | 0.042 | 0.086 | 0.096 | 0.106 | |
| 30 m_O | 1,916,595 | −0.044 | 0.110 | 0.118 | 13,703 | 0.027 | 0.089 | 0.092 | 0.118 | |
| 35 m_N | 1,026,498 | 0.016 | 0.097 | 0.098 | 13,703 | 0.030 | 0.108 | 0.112 | 0.099 | |
| 35 m_O | 3,688,289 | 0.020 | 0.087 | 0.089 | 13,703 | 0.027 | 0.086 | 0.090 | 0.089 | |
| 40 m_N | 3,111,338 | −0.065 | 0.112 | 0.129 | 13,703 | 0.038 | 0.129 | 0.134 | 0.130 | |
| 40 m_O | 1,042,611 | 0.003 | 0.137 | 0.137 | 13,703 | 0.015 | 0.083 | 0.084 | 0.136 | |
| 50 m_N | 928,771 | 0.017 | 0.102 | 0.103 | 13,703 | 0.023 | 0.097 | 0.100 | 0.103 | |
| 60 m_O | 923,817 | 0.041 | 0.129 | 0.135 | 13,703 | 0.004 | 0.086 | 0.086 | 0.135 | |
| Pre-Burn DTMLiDAR Resolution (m) | Post-Burn DTMUAV Resolution (m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0.1 | 0.5 | 1 | 5 | 10 | ||||||
| 1 | 0.44 a | (0.29) | 0.43 a | (0.29) | 0.33 | (0.26) | 0.52 | (0.27) | 0.66 | (0.26) |
| 5 | 0.37 b | (0.24) | 0.37 b | (0.23) | 0.26 | (0.20) | 0.45 | (0.20) | 0.58 | (0.20) |
| 10 | 0.30 c | (0.20) | 0.29 c | (0.20) | 0.19 | (0.16) | 0.38 | (0.16) | 0.51 | (0.16) |
| 20 | 0.24 d | (0.19) | 0.23 d | (0.19) | 0.13 | (0.15) | 0.31 | (0.16) | 0.44 | (0.15) |
| DTMIDW (10 m) | 0.25 | (0.20) | 0.24 | (0.20) | 0.14 | (0.16) | 0.32 | (0.16) | 0.46 | (0.16) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simpson, J.E.; Wooster, M.J.; Smith, T.E.L.; Trivedi, M.; Vernimmen, R.R.E.; Dedi, R.; Shakti, M.; Dinata, Y. Tropical Peatland Burn Depth and Combustion Heterogeneity Assessed Using UAV Photogrammetry and Airborne LiDAR. Remote Sens. 2016, 8, 1000. https://doi.org/10.3390/rs8121000
Simpson JE, Wooster MJ, Smith TEL, Trivedi M, Vernimmen RRE, Dedi R, Shakti M, Dinata Y. Tropical Peatland Burn Depth and Combustion Heterogeneity Assessed Using UAV Photogrammetry and Airborne LiDAR. Remote Sensing. 2016; 8(12):1000. https://doi.org/10.3390/rs8121000
Chicago/Turabian StyleSimpson, Jake E., Martin J. Wooster, Thomas E. L. Smith, Mandar Trivedi, Ronald R. E. Vernimmen, Rahman Dedi, Mulya Shakti, and Yoan Dinata. 2016. "Tropical Peatland Burn Depth and Combustion Heterogeneity Assessed Using UAV Photogrammetry and Airborne LiDAR" Remote Sensing 8, no. 12: 1000. https://doi.org/10.3390/rs8121000
APA StyleSimpson, J. E., Wooster, M. J., Smith, T. E. L., Trivedi, M., Vernimmen, R. R. E., Dedi, R., Shakti, M., & Dinata, Y. (2016). Tropical Peatland Burn Depth and Combustion Heterogeneity Assessed Using UAV Photogrammetry and Airborne LiDAR. Remote Sensing, 8(12), 1000. https://doi.org/10.3390/rs8121000