4.1. Accuracy Assessment, Edge Similarity and Class Agreement Results
Accuracy assessment with respect to the field data indicated the maps have variable but generally reasonable accuracy: 56% to 72% for GEM and 43% to 93% for Lund (
Table 6). These values are considered adequate for management and planning purposes, for which a value of about 60% is generally recommended [
3,
39]. Moreover, the obtained results fall within the range of values found in current research results of coral reef habitat mapping [
7,
12,
18,
40]. Therefore, both production efforts resulted in maps that were generally of a defensible quality in a benthic habitat mapping context.
Table 6.
Accuracy assessment results for the pixel based and object based maps.
Table 6.
Accuracy assessment results for the pixel based and object based maps.
| Island | GEM | Lund |
|---|
| Generalized Three Class Product (%) | Level 2 (%) | Level 3 (%) |
|---|
| Baixo Santo Antonio | 58 | 91 | 74 |
| Mafamede | 66 | 93 | 56 |
| Puga Puga | 63 | 83 | 60 |
| Baixo Miguel | 72 | 44 | 35 |
| Njovo | 61 | 82 | 55 |
| Caldeira | 56 | 58 | 43 |
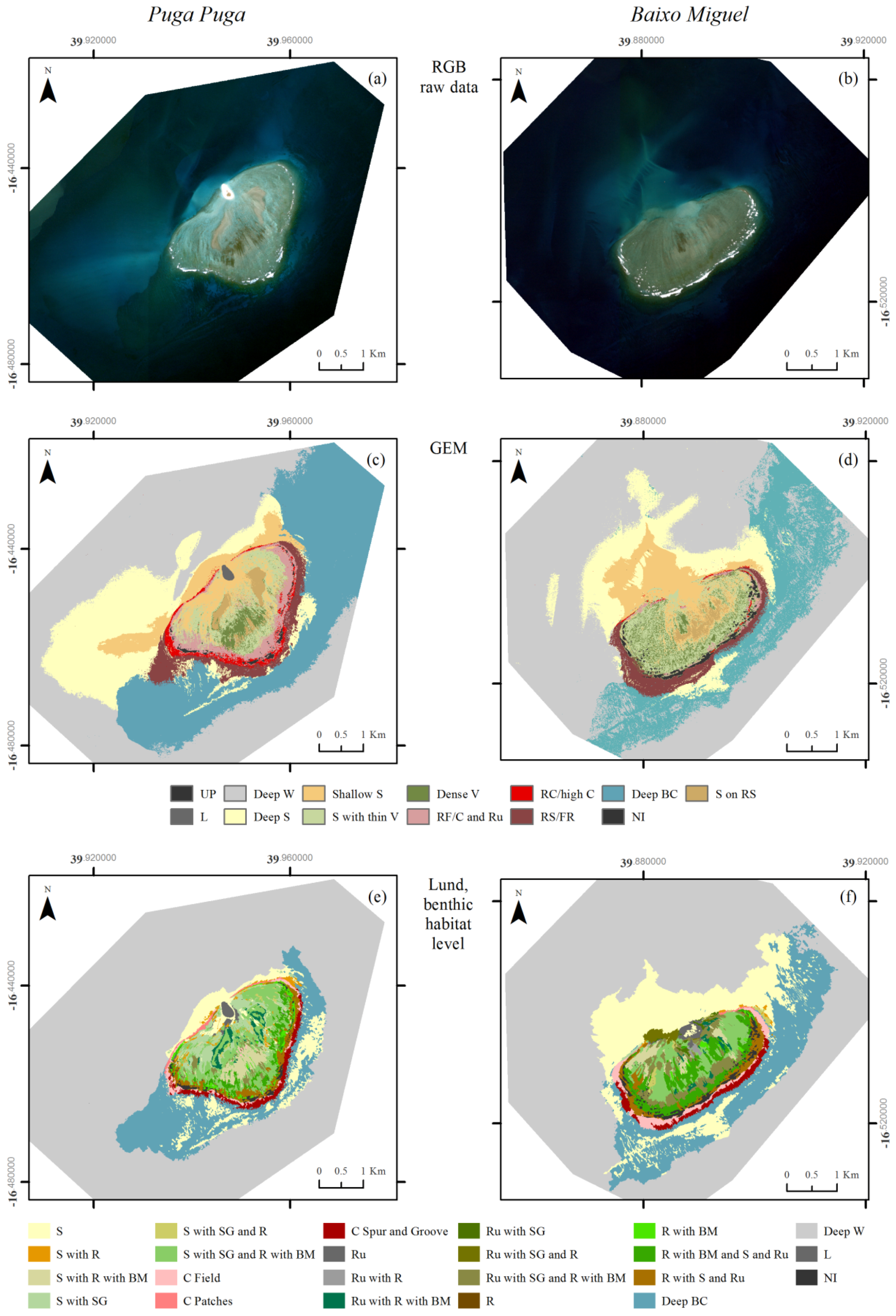
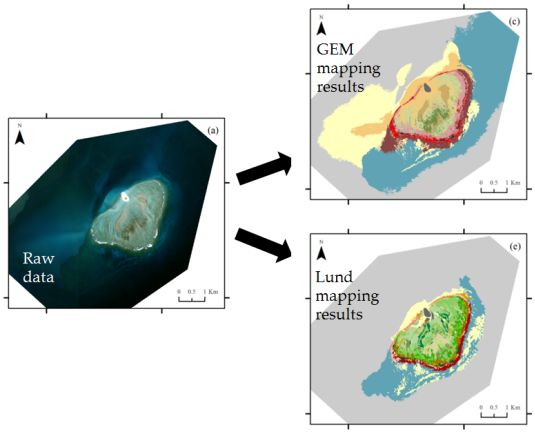
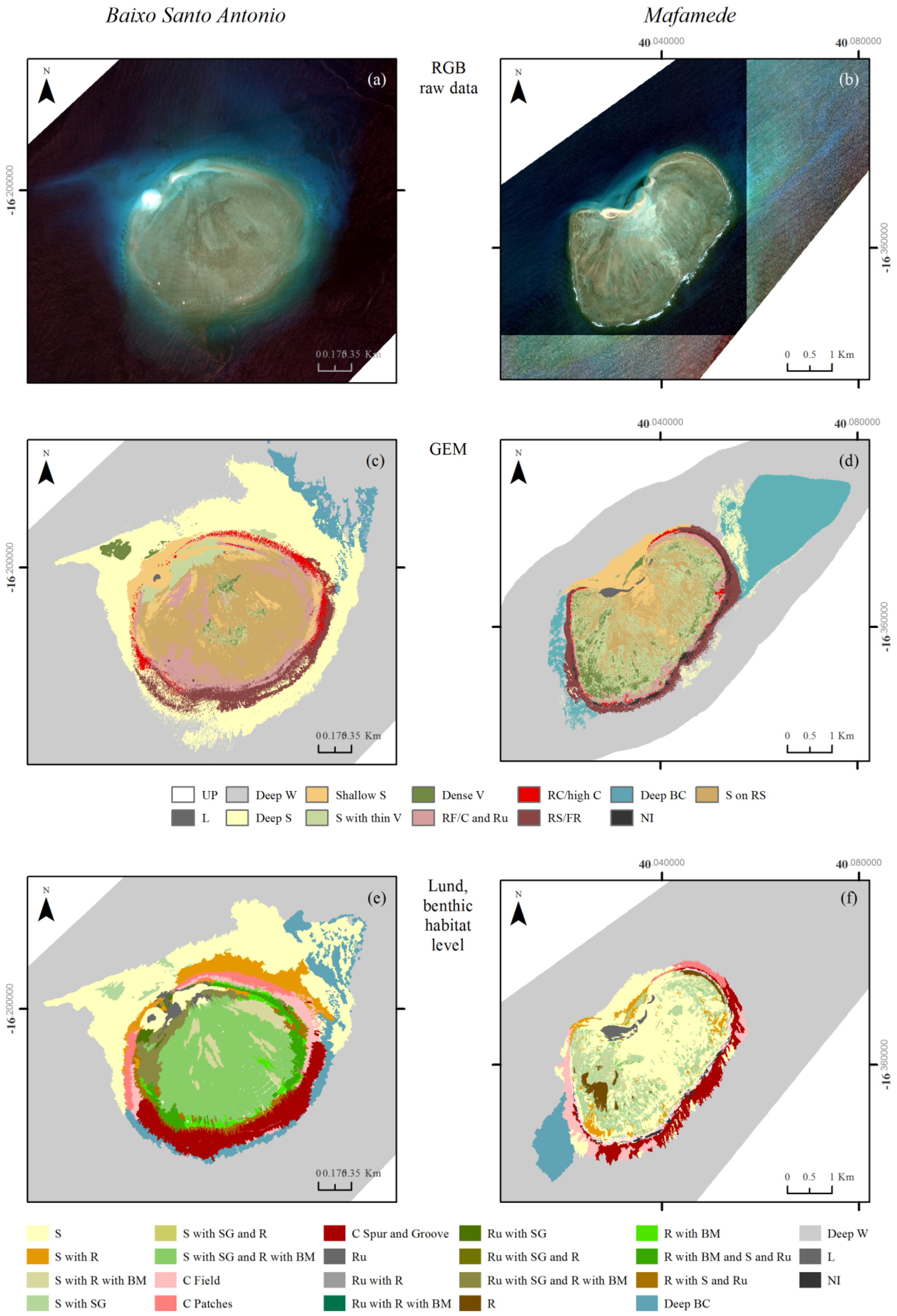
A first, rough visual assessment of the mapping outputs (
Figure 2), conducted by overlapping the three OBIA maps on the pixel based ones, allowed the identification of clear differences. While land and the overall shape of the coral reef system matched well, the deep benthic classes—deep benthic cover and deep sand—were often more extensive in GEM maps. Another observation is that the benthic habitat (level 3) Lund maps show more clearly delineated areas, particularly within the lagoon and reef crest, while avoiding the “salt and pepper” effect, which is a frequently identified advantage of the object based approach [
14,
41,
42].
The edge similarity results support the visual interpretation, quantifying the deep benthic cover edge correspondence as ranging from 2% to 16% (
Table 7). The remaining class comparisons, more complex to assess visually due to the number of classes included, shows a general good level of agreement, with an edge similarity index in order of 10% to 30% for coral containing classes and above 30% for vegetation in the majority of the locations.
The confusion matrices comparing the map pairs show very high (>75%) class agreement for “Land”, “Fore reef” and “Deep water” in all the six study locations (
Table 8). Two of the comparisons related to sand or rock substrate, “Bare 1” and “Bare 2”, had a very high agreement for about half of the locations, while “Bare 3” (Sand over rock substrate
vs. Rock) had very high agreement only at one. The “Coral containing” comparison had very good agreement at three sites and poor agreement at only one. Additionally, from the 18 generated confusion matrices, it was possible to observe that “Sand on rock substrate”, “Dense vegetation” and “Sand with thin vegetation” display a high level of agreement with the class “Lagoon” from the Lund classification scheme. This result was expected, and supports adequate spatial correspondence of classes, as these three are generally found in that geomorphological zone.
Figure 2.
Example of (a,b) raw data (min and max percentage clip = 0.2); (c,d) GEM and (e,f) Lund mapping results for Baixo Santo Antonio and Mafamede; BC=benthic cover, BM = brown macroalgae, C = coral, FR = fore reef, L = land, NI = No information, R=rock(s), RC = reef crest, RF = reef front, RS = reef slope, Ru = rubble, S = sand, SG = seagrass, UP=unprocessed,V = vegetation, W = water.
Figure 2.
Example of (a,b) raw data (min and max percentage clip = 0.2); (c,d) GEM and (e,f) Lund mapping results for Baixo Santo Antonio and Mafamede; BC=benthic cover, BM = brown macroalgae, C = coral, FR = fore reef, L = land, NI = No information, R=rock(s), RC = reef crest, RF = reef front, RS = reef slope, Ru = rubble, S = sand, SG = seagrass, UP=unprocessed,V = vegetation, W = water.
Table 7.
Edge similarity index values for results for selected pairs of classes.
Table 7.
Edge similarity index values for results for selected pairs of classes.
| Island | Coral (%) | Vegetation (%) | Deep Benthic Cover (%) |
|---|
| Baixo Santo Antonio | 12.3 | 6.5 | 16.3 |
| Mafamede | 39.7 | 77.6 | 1.6 |
| PugaPuga | 8.9 | 33.4 | 6.8 |
| Baixo Miguel | 7.3 | 20.3 | 4.2 |
| Njovo | 35.9 | 58.6 | 12.8 |
| Caldeira | 32.1 | 45.5 | 2.3 |
The class comparison “Shallow surround”, “Bare 2” and “Deep benthic cover” show a very low agreement (<50%) for the majority of the locations.
Table 8.
Class agreement matrix results for selected pairs of classes.
Table 8.
Class agreement matrix results for selected pairs of classes.
| Comparison | Baixo Santo Antonio | Mafamede | PugaPuga | Baixo Miguel | Njovo | Caldeira |
|---|
| Land | 100.0 | 99.8 | 99.9 | - | 99.8 | 99.5 |
| Shallow surround | 46.4 | 28.8 | 24.9 | 71.7 | 18.0 | 16.7 |
| Reef crest | 2.1 | 35.3 | 14.1 | 7.5 | 33.3 | 49.6 |
| Fore reef | 80.4 | 79.0 | 80.4 | 80.4 | 80.4 | 80.4 |
| Deep benthic cover | 34.9 | 1.5 | 25.0 | 51.1 | 2.7 | 8.2 |
| Deep water | 98.5 | 92.2 | 99.9 | 95.2 | 97.9 | 99.4 |
| Bare 1 | 57.7 | 94.1 | 77.8 | 35.5 | 79.9 | 37.0 |
| Bare 2 | 80.0 | 95.3 | 62.9 | 31.4 | 51.1 | 65.6 |
| Bare 3 | 11.2 | 3.4 | 9.8 | 58.5 | 48.7 | 10.2 |
| Vegetation-sand confusion | 96.2 | 96.1 | 77.9 | 35.6 | 63.0 | 56.8 |
| Vegetation | 82.1 | 65.9 | 36.8 | 89.3 | 68.1 | 90.8 |
| Coral containing | 81.7 | 79.6 | 35.0 | 57.5 | 61.2 | 85.7 |
The GEM classes “Deep sand” and “Deep benthic cover” mostly coincided with the Lund class “No information”, which represents locations where it was considered the sea bottom was not visible, which included not only deep water but also cloud cover, white caps and sun glint. As the number of pixels with the above-surface features is much smaller than those over deep water, “No information” was used as a direct equivalent of “Deep water”. These results support the visual interpretation of the maps, where the majority of the deep feature identified in the pixel based maps corresponds to deep water in the object based maps. Identifying the deepest bottom features by visual interpretation requires using various stretches of the imagery to infer where features are and so is to some extent subjective, being reliant on the effort put by the operator into it. Nevertheless, the human eye remains more powerful than automated analysis for identifying subtle and noisy spatial patterns so visual interpretation is a valuable tool in deep areas, even if it does not comprise of a systematic analysis. In particular, the fundamental limitation in deep waters is that relatively few photons that reach the sensor have interacted with the bottom, and no processing algorithm can compensate for this [
43]. The greater extent of the “Deep sand” and “Deep benthic cover” classes in the pixel based production (
Figure 2c–f,
Figure 3c–f and
Figure 4c–f) is probably in large part due to the effort and interpretation of the operator.
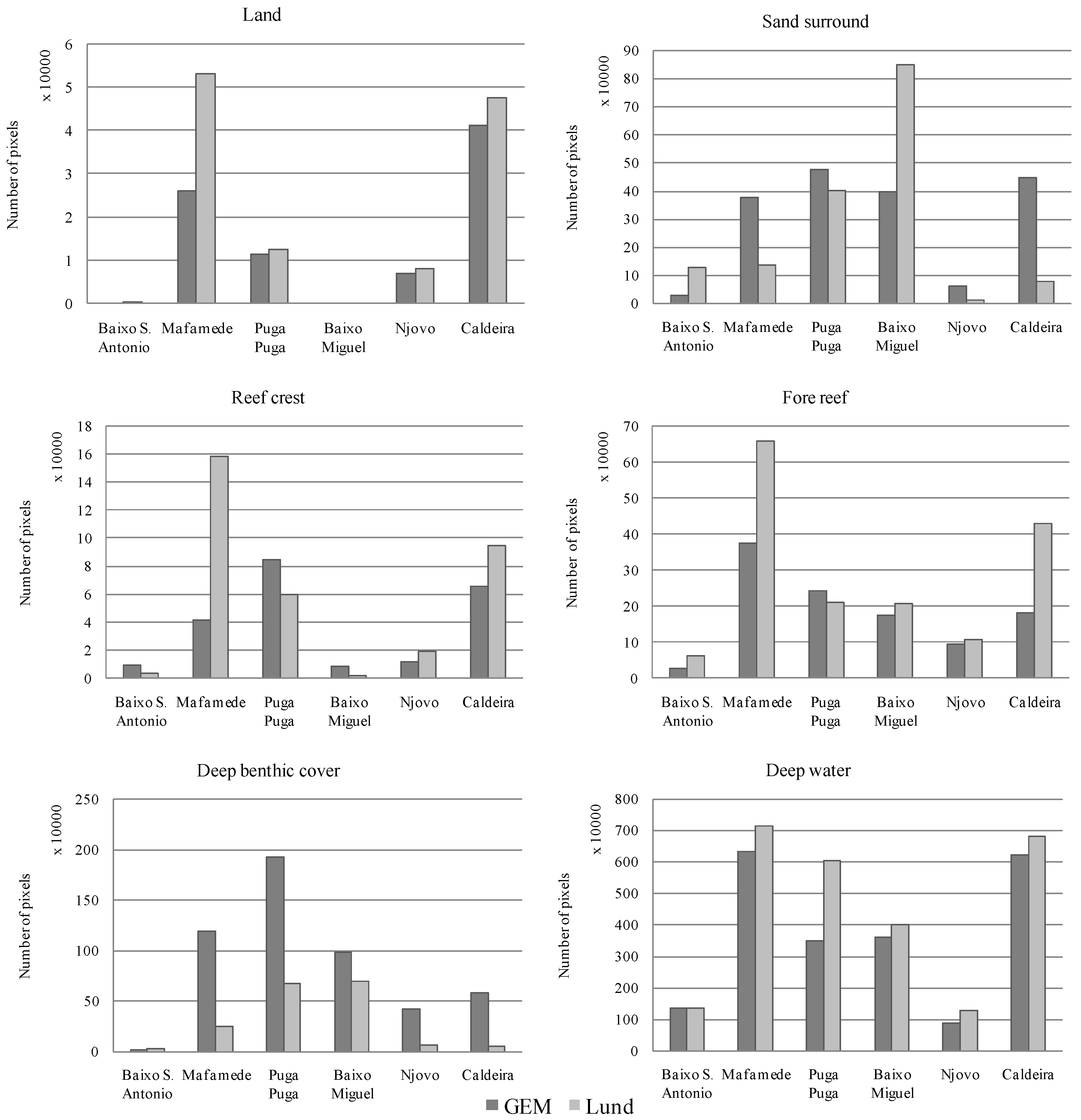
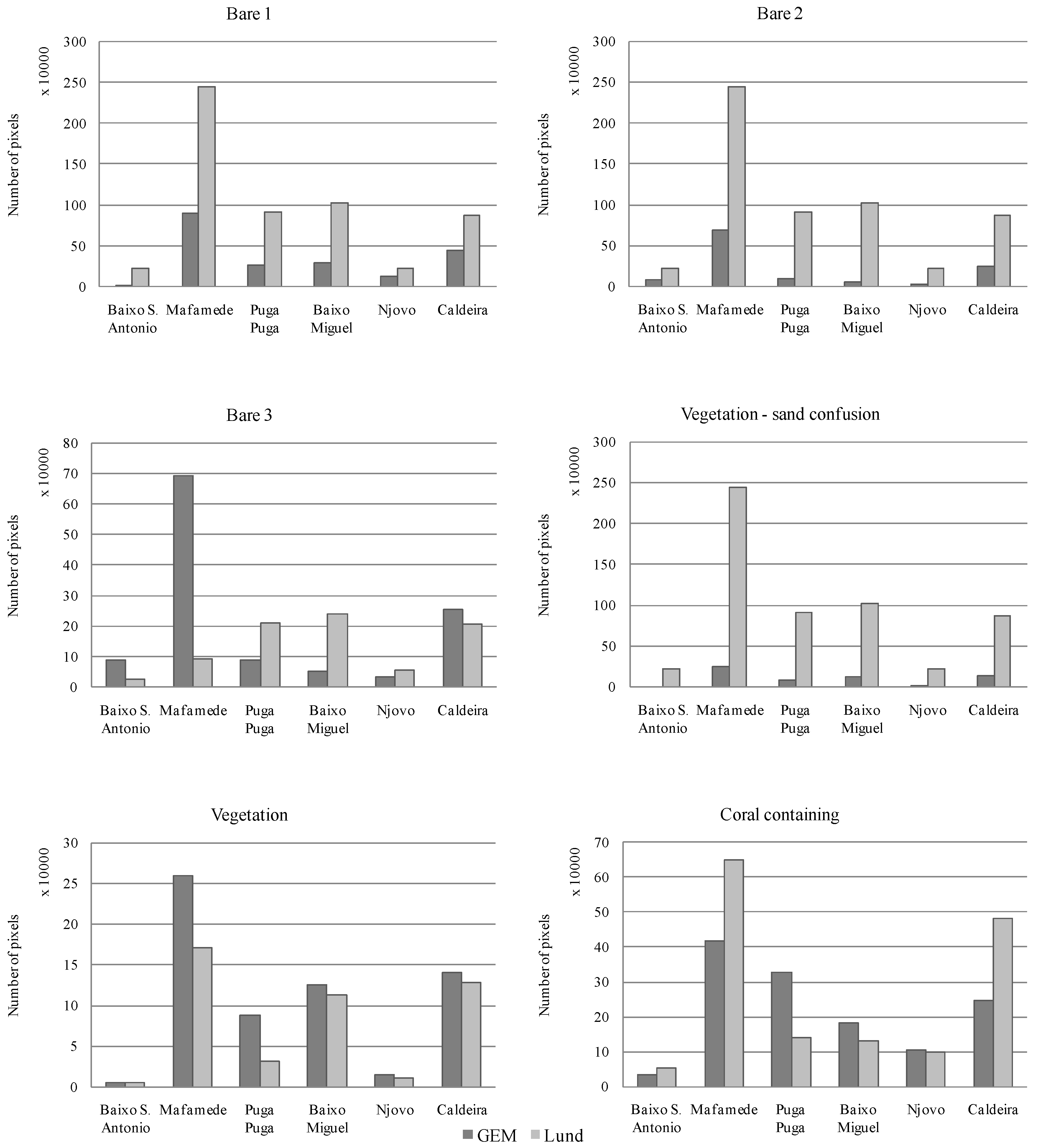
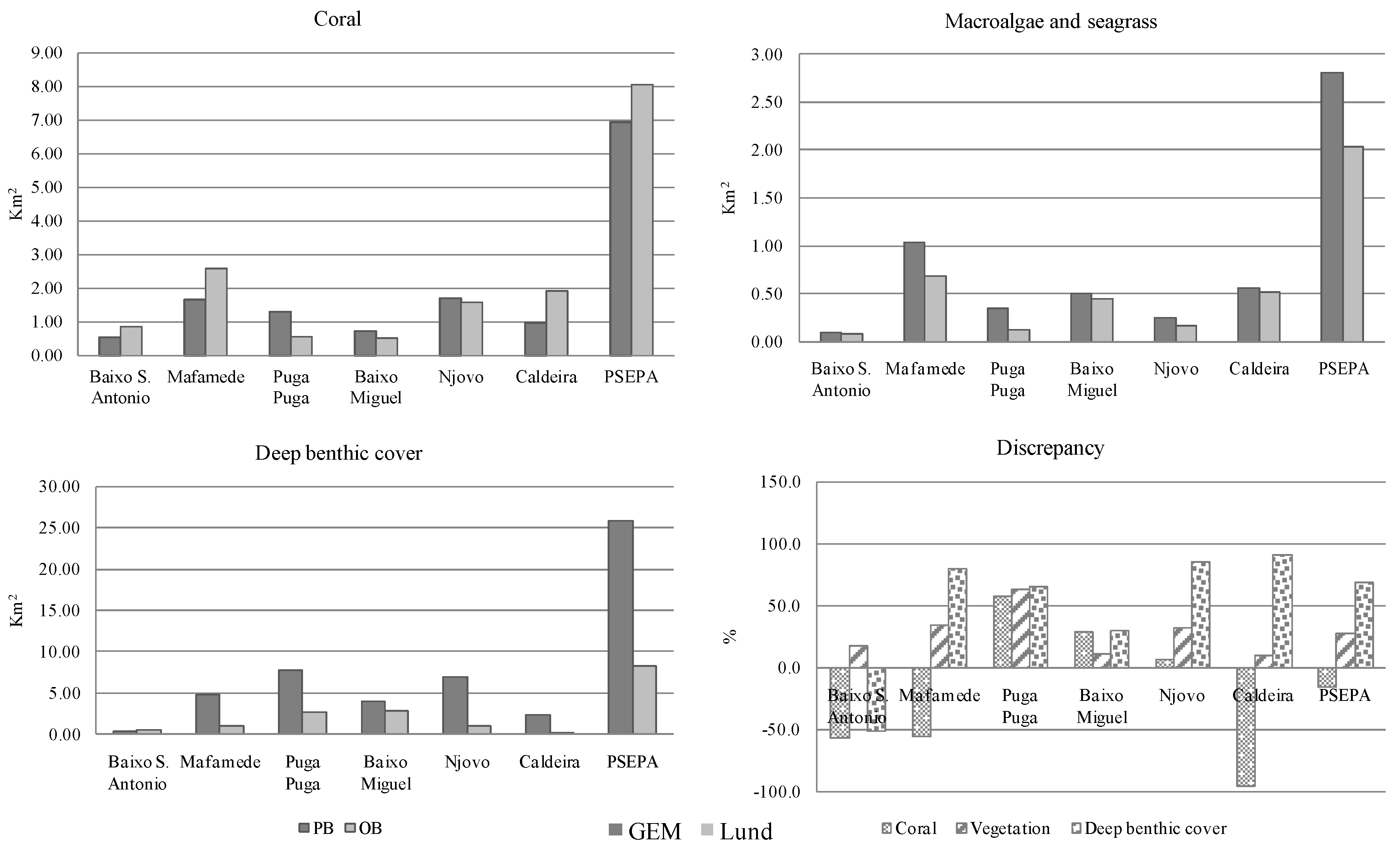
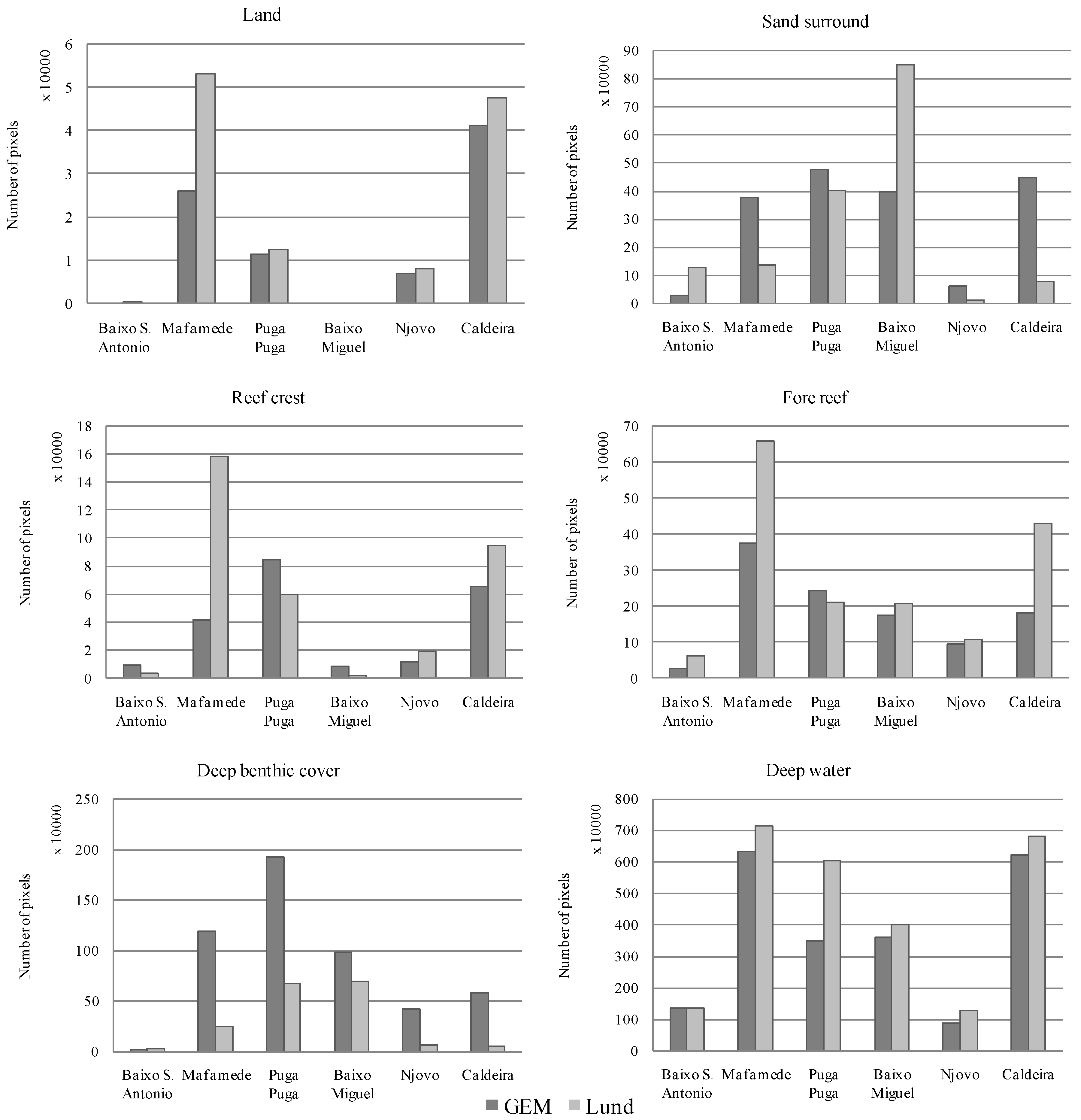
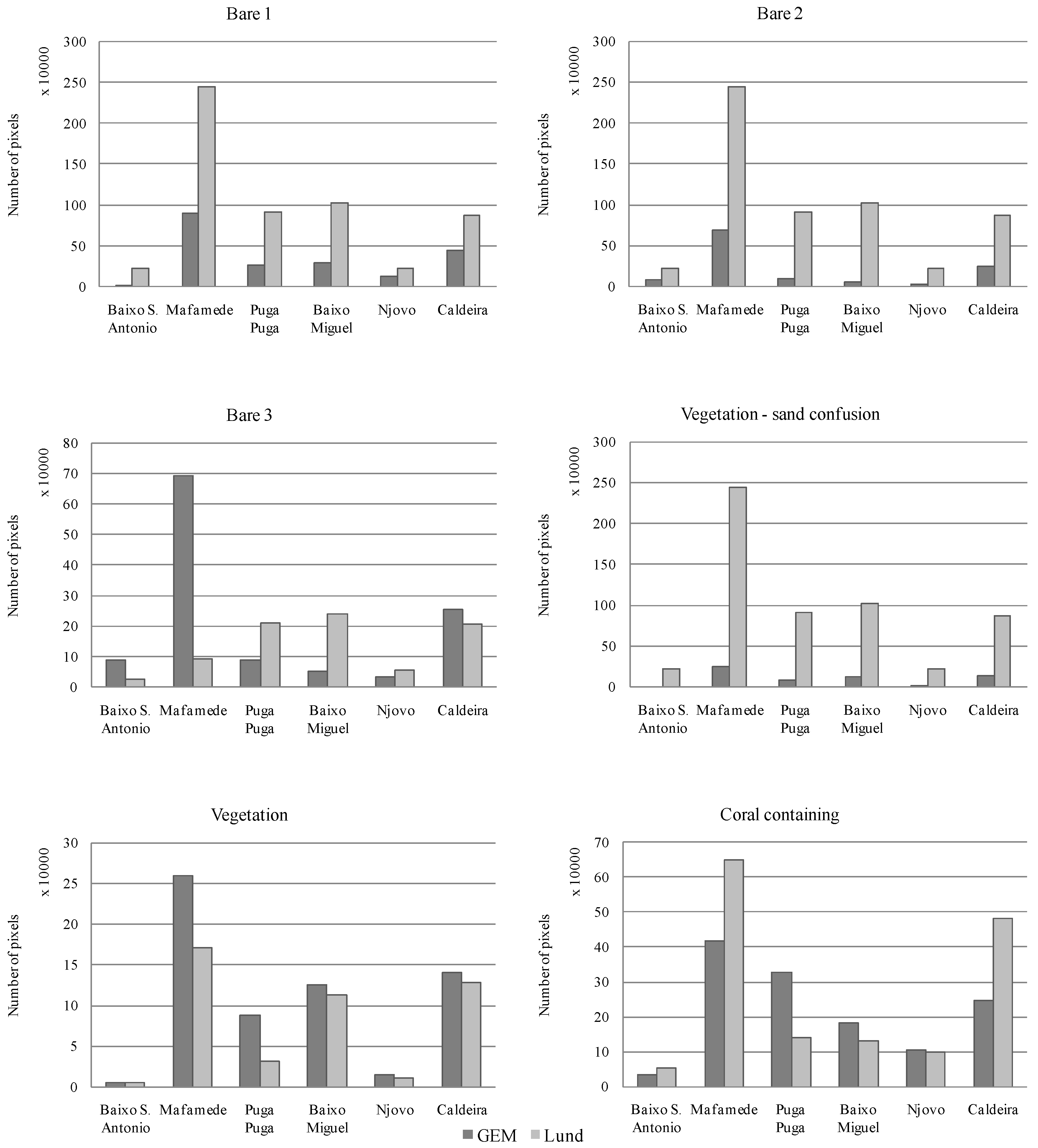
When comparing the number of pixels mapped for the selected class pairs, it is clear that results are in general similar for class pairs at the geomorphological level (
Figure 5), but less so at the benthic habitat level (
Figure 6). However, there is good agreement for the comparison of Coral containing areas and Vegetation.
Figure 3.
Example of (a,b) raw data (min and max percentage clip = 0.2); (c,d) GEM and (e,f) Lund mapping results for PugaPuga and Baixo Miguel; BC = benthic cover, BM = brown macroalgae, C = coral, FR = fore reef, L = land, NI = No information, R = rock(s), RC = reef crest, RF = reef front, RS = reef slope, Ru = rubble, S = sand, SG = seagrass, UP=unprocessed,V = vegetation, W = water.
Figure 3.
Example of (a,b) raw data (min and max percentage clip = 0.2); (c,d) GEM and (e,f) Lund mapping results for PugaPuga and Baixo Miguel; BC = benthic cover, BM = brown macroalgae, C = coral, FR = fore reef, L = land, NI = No information, R = rock(s), RC = reef crest, RF = reef front, RS = reef slope, Ru = rubble, S = sand, SG = seagrass, UP=unprocessed,V = vegetation, W = water.
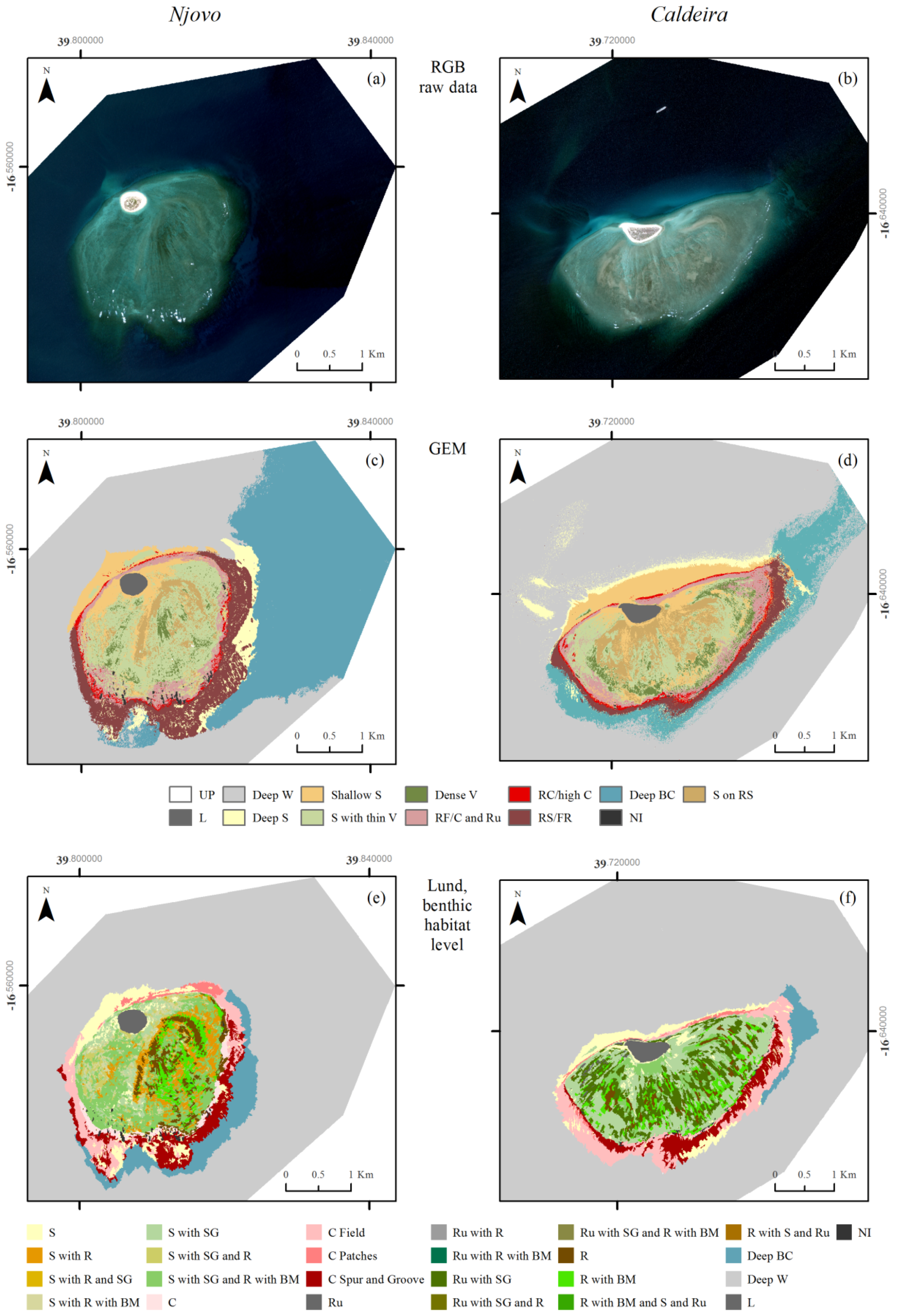
Figure 4.
Example of (a,b) raw data (min and max percentage clip = 0.2); (c,d) GEM and (e,f) Lund mapping results for Njovo and Caldeira; BC = benthic cover, BM = brown macroalgae, C = coral, FR = fore reef, L = land, NI = No information, R = rock(s), RC = reef crest, RF = reef front, RS = reef slope, Ru = rubble, S = sand, SG = seagrass, UP=unprocessed,V = vegetation, W = water.
Figure 4.
Example of (a,b) raw data (min and max percentage clip = 0.2); (c,d) GEM and (e,f) Lund mapping results for Njovo and Caldeira; BC = benthic cover, BM = brown macroalgae, C = coral, FR = fore reef, L = land, NI = No information, R = rock(s), RC = reef crest, RF = reef front, RS = reef slope, Ru = rubble, S = sand, SG = seagrass, UP=unprocessed,V = vegetation, W = water.
Figure 5.
Paired class comparison across the different coral reef systems at the geomorphological level; GEM refers to the pixel based mapping products, and Lund to the OBIA mapping.
Figure 5.
Paired class comparison across the different coral reef systems at the geomorphological level; GEM refers to the pixel based mapping products, and Lund to the OBIA mapping.
4.2. Systematic Biases in Production Methods
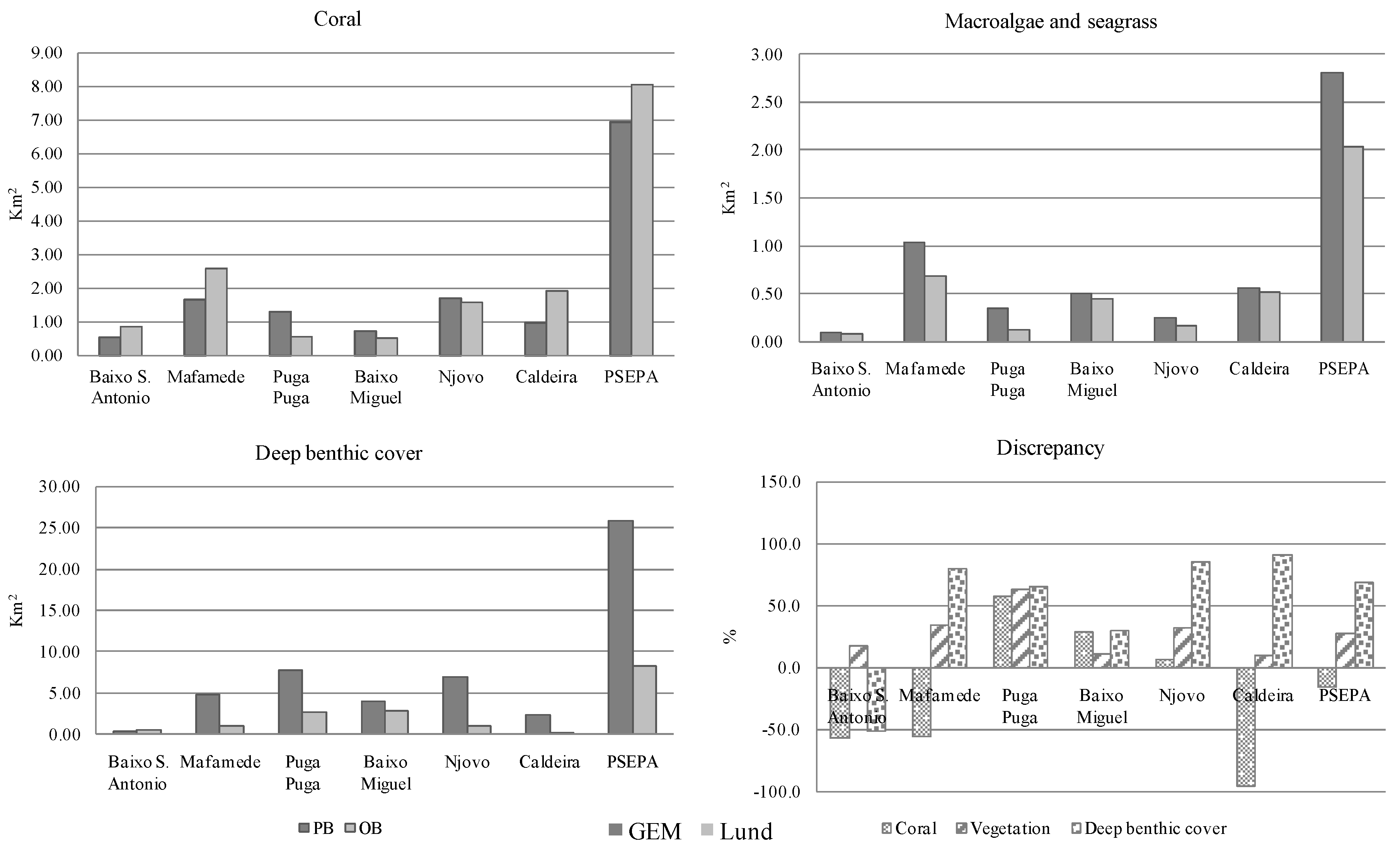
The results show low
p-values (<0.001) for half of the classes, confirming that there is indeed systematic over- or underestimation of the mapped classes (
Table 9), but this could arise simply from the fact that the class groupings do not quite represent the same things in the two analyses. However the comparisons for “Shallow surround”, “Reef crest”, “Fore reef”, “Deep benthic cover”, “Bare 3” and “Coral containing” do not exhibit statistically significant systematic over- or underestimation (
i.e.,
p > 0.05).
Figure 6.
Paired class comparison across the different coral reef systems at the bottom cover and benthic habitat levels.
Figure 6.
Paired class comparison across the different coral reef systems at the bottom cover and benthic habitat levels.
This result is not surprising, as most of the class groupings don’t correspond exactly to each other, due to the similarity in the islands configuration and composition, systematic over- or underestimation might be expected, rather than a combination of both. It is interesting to notice that the classes likely to represent the same extent refer to features with either very clear spectral signal (such as shallow sand), easy to identify visually (such as reef crest), or fairly stable features (such as geomorphological structures and coral), although their correlation was low. On the other hand, the classes that indicated under- and/or overestimation obtained a high level of agreement, likely due to the quite often larger extent of the object based results for the selected pairs (
Figure 5).
Table 9.
Wilcoxon signed-rank test for paired samples results (p-value, W) and linear intercorrelation strength (r2).
Table 9.
Wilcoxon signed-rank test for paired samples results (p-value, W) and linear intercorrelation strength (r2).
| Comparison | p-Value | W | r2 |
|---|
| Land | <0.001 | 0 | 0.861 |
| Shallow surround | >0.2 | 9 | 0.200 |
| Reef crest | >0.2 | 7 | 0.321 |
| Fore reef | 0.05–0.10 | 2 | 0.759 |
| Deep benthic cover | 0.05–0.10 | 1 | 0.629 |
| Deep water | <0.001 | 0 | 0.890 |
| Bare 1 | <0.001 | 0 | 0.923 |
| Bare 2 | <0.001 | 0 | 0.812 |
| Bare 3 | >0.2 | 10 | 0.012 |
| Vegetation | <0.001 | 0 | 0.902 |
| Vegetation-sand confusion | <0.001 | 0 | 0.931 |
| Coral containing | >0.2 | 8 | 0.574 |
By plotting the extent of the pairs of classes against each other, strong linear correlations (
r2 > 0.75) were found for the class pairs that showed a high level of agreement across the study area (
Table 8), as well as null Wilcoxon’s Ws (
Table 9). This means that half of the analyzed pairs of classes, despite having distinct areas, were identified spatially with high consistency and have proportional dimensions throughout the Primeiras islands in the PSEPA. Weak linear correlations (
r2 < 0.35) were found for the pairs of classes with higher values of W, meaning that although the classes were as statistically likely to have the similar extents, their variation didn't show the same behavior, or over- or underestimation.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}