1. Introduction
Terrestrial laser scanning (TLS) is used in a wide range of applications including forestry, engineering, and cultural heritage documentation [
1]. The fundamental product of TLS are point clouds created using distances calculated by the lidar sensor, and measured horizontal and vertical angles of the beams at the instants of ranging [
2]. Initially, TLS point cloud coordinates are relative to the scanner. That is, the instrument itself defines the origin and basis for point coordinates. Although size and shapes of objects can be calculated directly from these initial point clouds, in many cases several point clouds from different scan stations, and therefore in different coordinate systems, must be combined via
registration in order to exploit data collected from multiple vantages simultaneously. Determination of point cloud coordinates in a reference/mapping system, or
georeferencing, is often required to enable feature location and data fusion. Precisely, registration is the process of determining the elements of relative orientation of one point cloud with respect to another. This requires the determination of six parameters for each station, elements of three-dimensional translation and rotation that align separate datasets. Georeferencing is a similar process in that six elements of three-dimensional orientation are determined, however, it requires external association with the reference coordinate system to which the data are transformed.
The most common methods for TLS registration and georeferencing require reflective targets. Artificial targets allow for precise determination of discrete locations in object space since they are easily identified and modelled from the point cloud [
3]. Among methods using targets, the most widespread involves the solution of a six-parameter transformation (or Helmert transformation with constrained scale = 1) using three or more targets. These parameters transform point coordinates from the initial scanner system into a reference coordinate system.
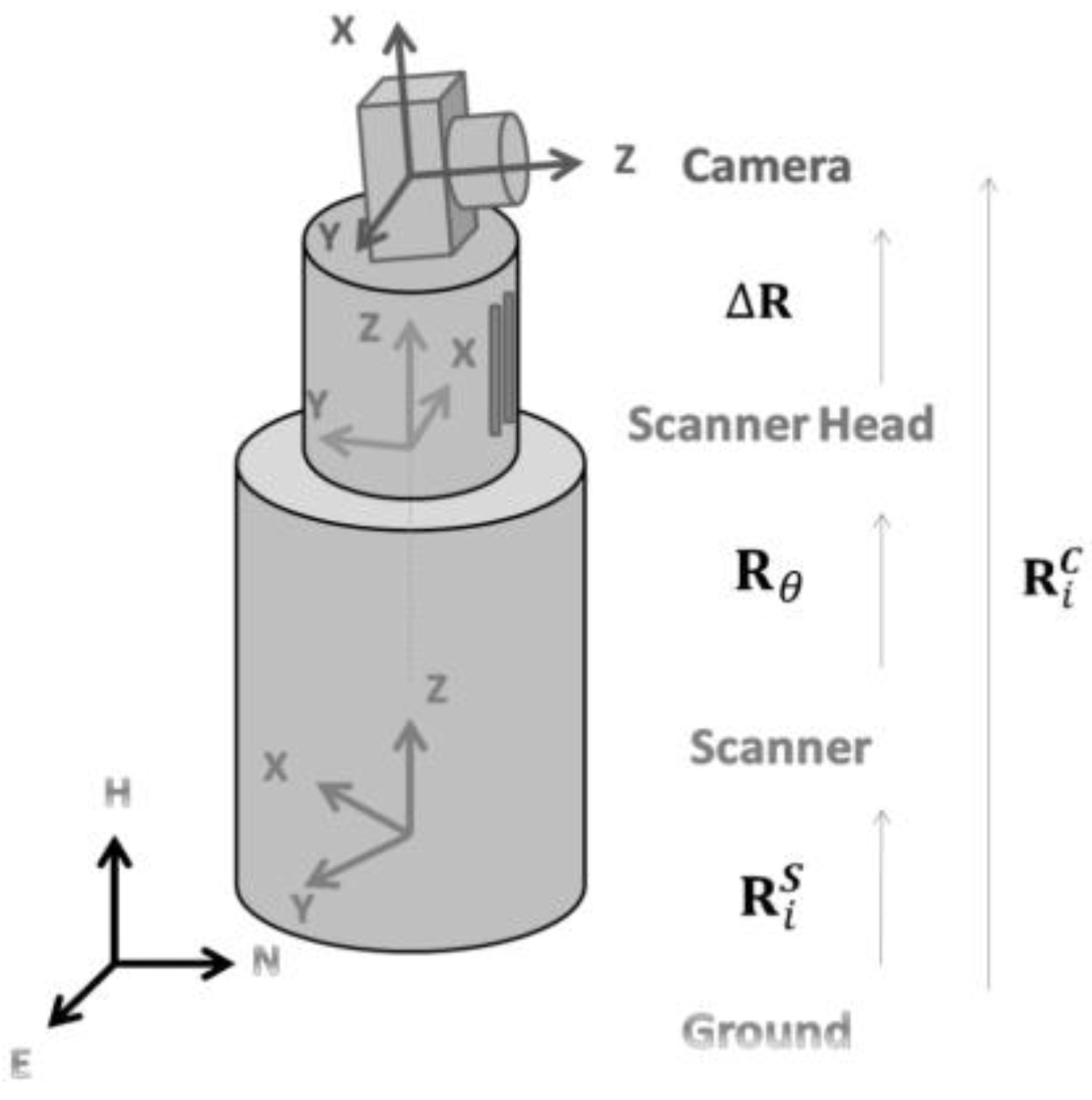
The fundamental condition equation in both registration and georeferencing is shown in Equation (1), where:
is the three-dimensional rotation matrix from the reference system to some scanner system
;
are the coordinates of the origin of scanner system
in the reference coordinate system;
are the coordinates of location
in the reference coordinate system; and
are the coordinates of target
in the scanner coordinate system
, typically associated with an artificial target in practice.
In the case of georeferencing,
is comprised of surveyed reference coordinates found independently of TLS observations (e.g., from a total-station or GNSS survey). As for registration, typically a single scanner system
is chosen as the reference coordinate system such that:
;
; and all
. Thus, when building observation equations, these values are constant when
. For both georeferencing and registration, the six parameters associated with each unknown scanner system are resolved using least squares adjustment. Since the observation equations are nonlinear, the least squares solution is found iteratively using first-order Taylor series expansion [
4]. Requisite initial approximations for the unknown transformation parameters can be calculated using the method described in [
5]. The traditional method is sensitive to the geometry/placement of targets. They should be located within the area of interest to avoid magnified error propagation, and should be well distributed (e.g., noncollinear). Although three points are sufficient for a technically complete solution of the transformation parameters, there is no redundancy in the direction normal to the plane formed by them. This can be ameliorated by including additional targets with sufficient diversity in the direction normal to this plane (non-coplanar), although this may be difficult to achieve in practice.
Another method using targets is
backsighting. In backsighting, the instrument is precisely leveled, or tilt components are resolved via tilt-compensator, at an initial station with known coordinates either from a previous survey or from a scanner-mounted GNSS antenna (e.g., [
6]). Since the position of the scanner
is known, and the tilt components are eliminated by leveling the instrument, only the azimuth component of
must be found. This is accomplished by observing a distant target, having known coordinates,
with the scanner. This method can be used to traverse a set of stations in a fashion similar to that performed with a total station, carrying out scans at each. Following an initial occupation on and backsighting of points with known reference coordinates, thus providing the initial station’s azimuth, the scanner can be set up on the foresighted point. The point associated with the previous station can then be backsighted, providing the current station’s azimuth, and the process continued so that each station has known position and azimuth. Note that this method can be used for registration by, for example, using the first occupied station as the origin and observing the coordinates of the next station via an artificial target in the first station’s scanner system coordinates. The azimuth of the next station can be found by occupying it and backsighting the previous station. This process is then repeated for subsequent stations. This and other similar methods rely on precise leveling or direct observation of the tilt components of the scan station
. The study presented in [
7] demonstrates that tilt compensators can eliminate the need for precise leveling of the scanner, although leveling is still encouraged when possible in case of compensator failure.
Another solution using artificial targets is the multiple station/multiple target method. Here, the reference system coordinates of at least three scanner stations are observed using either a single scanner-mounted GNSS antenna or by occupying surveyed control points. The stations are registered to a common scanner system k using three or more intervisible targets, and each is transformed to this system. The reference system coordinates and common-system coordinates of each scanner station can then be used to solve for a transformation which is applied to the combined point cloud. This method can be performed sequentially, although a simultaneous solution is preferred.
Techniques using artificial targets rely on extra and often cumbersome equipment. The additional set-up of targets also requires significant time expense. Furthermore, target placements are sometimes dangerous or simply not feasible due to terrain or safety considerations, and extreme terrains tend to be prominent subjects for TLS (e.g., landslides: [
8,
9,
10], and volcanos: [
11]). Methods that do not use artificial targets can circumvent some of these pitfalls while retaining analogous overall approaches to the registration/georeferencing problem. For example, in [
12] and [
13], a method for acquisition in coastal areas that employs a scanner-mounted GPS antenna along with a tilt compensator is reported. Since backsighting previously-occupied stations on the beach is problematic, backsight estimates are made in the field at each scan station and refined via subsequent, simultaneous adjustment of each station’s azimuth component after the collection using point cloud matching techniques. Perhaps the most common non-target methods are variants of the Iterative Closest Point algorithm (ICP), where the mean square positional error of pairwise “closest” points in two point clouds is iteratively minimized to find the registration transformation parameters [
14]. Some reported results of ICP methods are excellent, however they are generally time-consuming, require precise initial approximations, and can potentially converge to local minima [
15]. Furthermore, ICP operation on TLS datasets can be challenging due to perspective differences in scattered scenes (e.g., those containing vegetation) and varying point densities, both of which can lead to incorrect point correspondences and therefore poor registration.
Another targetless registration option that has been explored is the use of close range photogrammetry, advantageous due to its use of a few precise conjugate points in contrast with ICP, and potential for automation. For example, [
16] developed a method for registering lidar point clouds using a scanner-mounted camera which yielded more precise results than ICP, albeit under purposefully ICP-unfavorable conditions. Further, [
17] showed an improvement to laser-scan measurements when including image observations in a combined block adjustment, demonstrating the utility of imagery due to its high spatial quality even if the project does not require photography. In [
18], a method using automated image feature matching via the Speeded-Up Robust Features (SURF) [
19] technique to find conjugate points between scanner-fixed cameras and subsequently register scanner station data is presented with results comparable to ICP. Methods that use photogrammetry must, however, take into account the spatial relationship between the scanner and camera coordinate systems, adding to the complexity of the computations. These parameters can either be measured, or included as part of an integrated adjustment. Similarly, the intrinsic, or interior camera calibration parameters must also be modeled. The integrity of the physical components associated with these added parameters dictate how often they need to be re-computed. A potential method related to photogrammetric augmentation is the use of the intensity of the laser returns to form a two-dimensional map upon which photogrammetric methods can be applied to register scanner station data [
20]. This method may be particularly useful in low-light conditions that render cameras ineffectual.
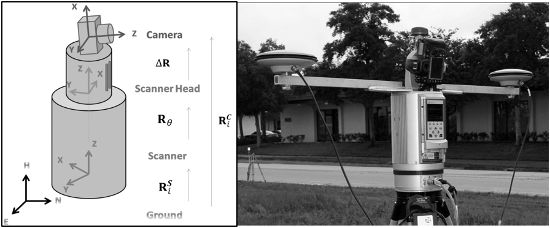
Sensor-side instrumentation is an approach to circumventing the need for artificial targets. Specifically, scanner-mounted GNSS antennas have been used to resolve position and angular orientation directly. These methods remove the necessity for external references altogether. The authors of [
21] and [
22] used up to two scanner-mounted GNSS antennas and an inclinometer to directly georeference the TLS data. The approach effectively resolved transformation parameters (per-profile heading and position) via an Extended Kalman Filter. The authors of [
23] and [
24] presented a method that uses two GNSS antennas mounted on the scanner to directly georeference lidar data by using the motion of the scanner head to derive the six transformation parameters. This paper is an extension of that research. It presents an augmentation of the previous method by incorporating close range photogrammetry enabled by a scanner-mounted camera, and test results of multiple “configurations” or combinations of sensor data and processing methods in terms of estimated uncertainty and check point-evaluated accuracy. A general model for georeferencing the TLS data through least-squares adjustment given the presented sensor configuration is provided.
3. Experiments
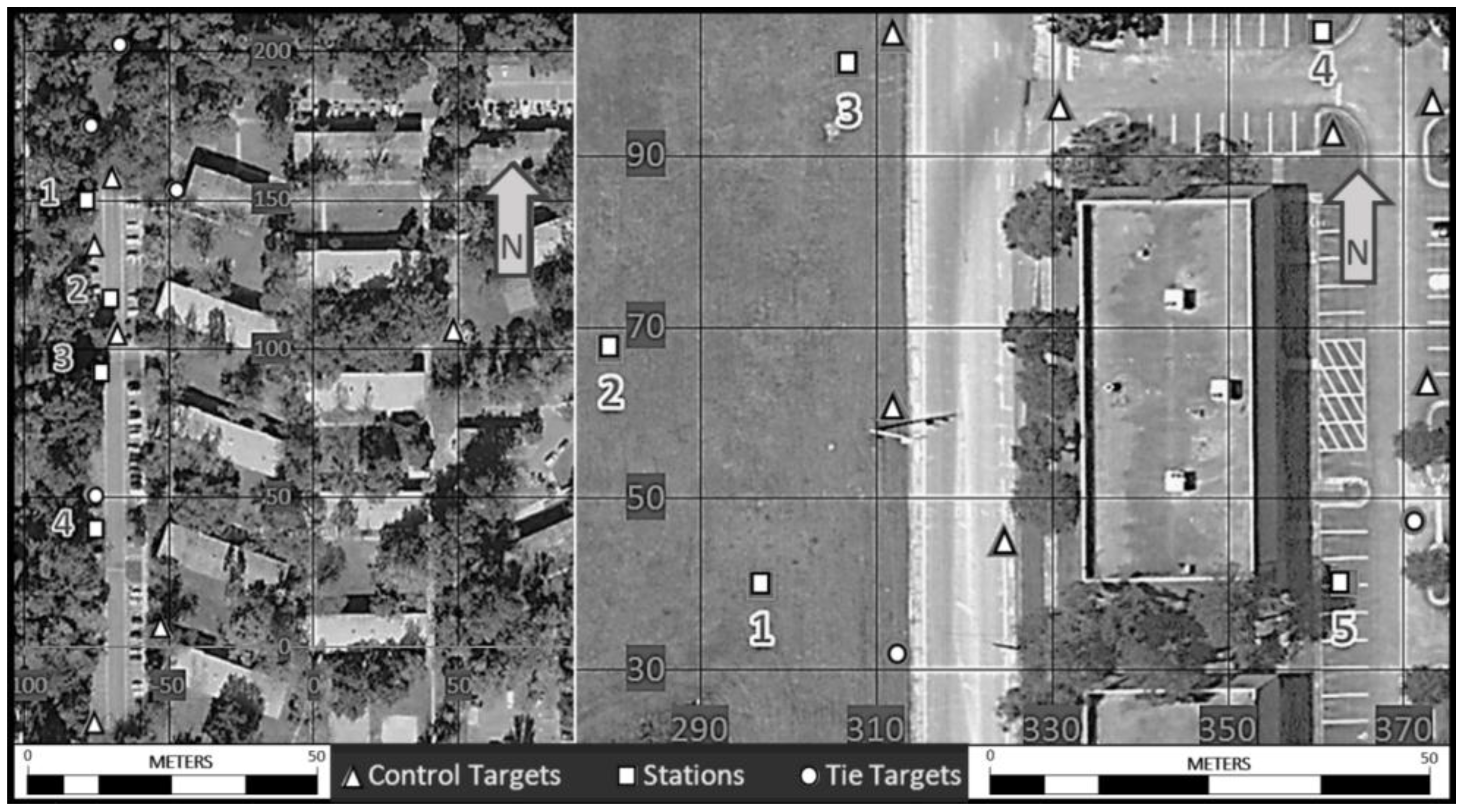
Two sites were chosen to compare various targetless adjustment configurations. The first was in Corry Village at the University of Florida campus in Gainesville, Florida (Site 1). The second was in Orlando, Florida near the Riegl USA offices (Site 2). The Site 1 data were characterized by poor geometry of scan stations target distribution. The Site 2 data had closer to optimal geometry with both stations and targets well-distributed throughout the site. Furthermore, Site 2 had fewer trees near scanner stations, and therefore satellite signals were less occluded.
Figure 3 shows each site and associated scan stations and target locations. The Site 1 project had four stations and ten artificial targets, six of which had surveyed control coordinates. The Site 2 project had five stations and nine artificial targets, seven of which had surveyed control coordinates. Control coordinates were obtained using post-processed static GPS, and had estimated absolute horizontal and vertical uncertainties of about 1 cm/σ horizontal and < 2 cm/σ vertical for Site 1, and 1 cm/σ horizontal and < 1 cm/σ vertical for Site 2.
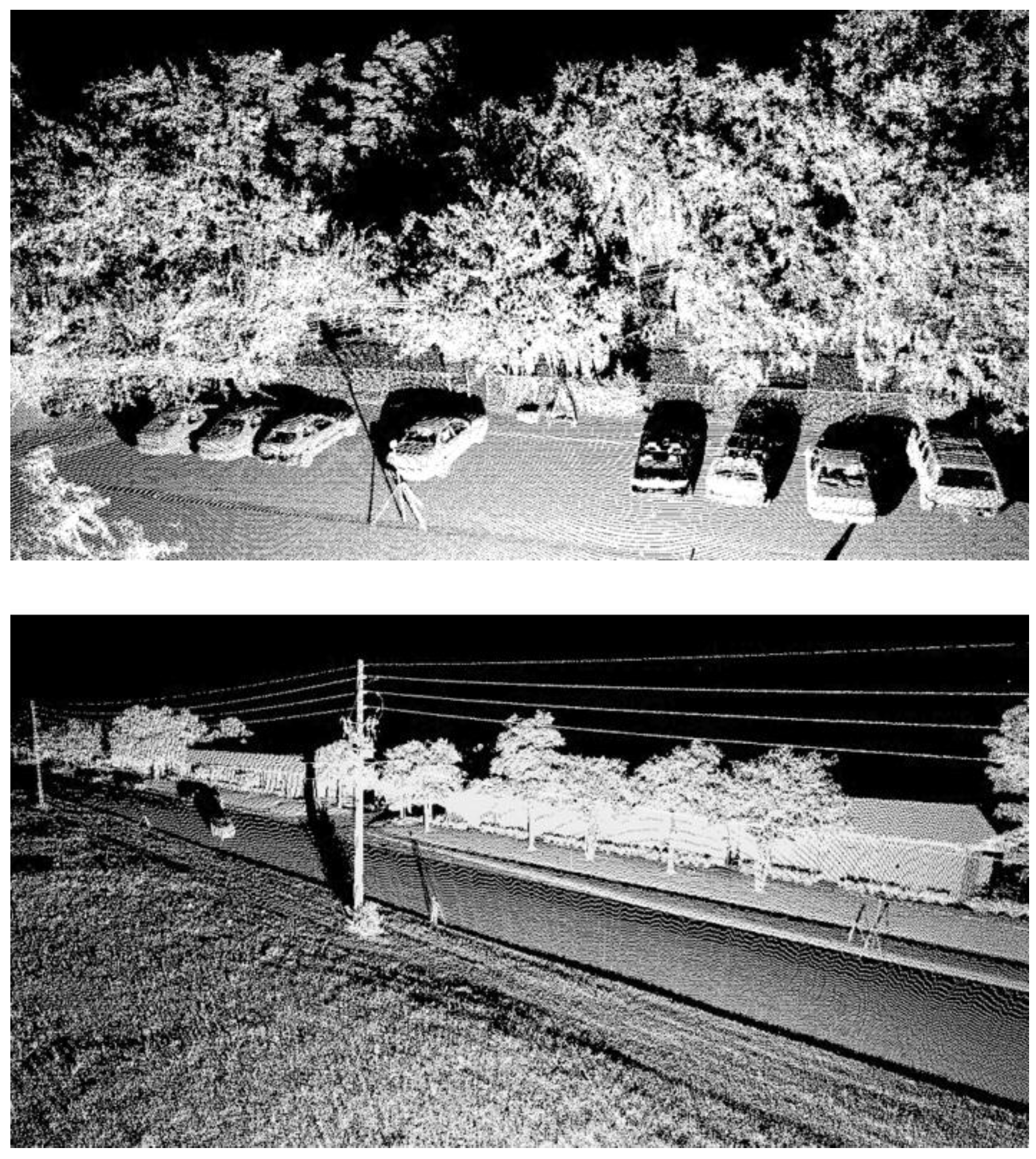
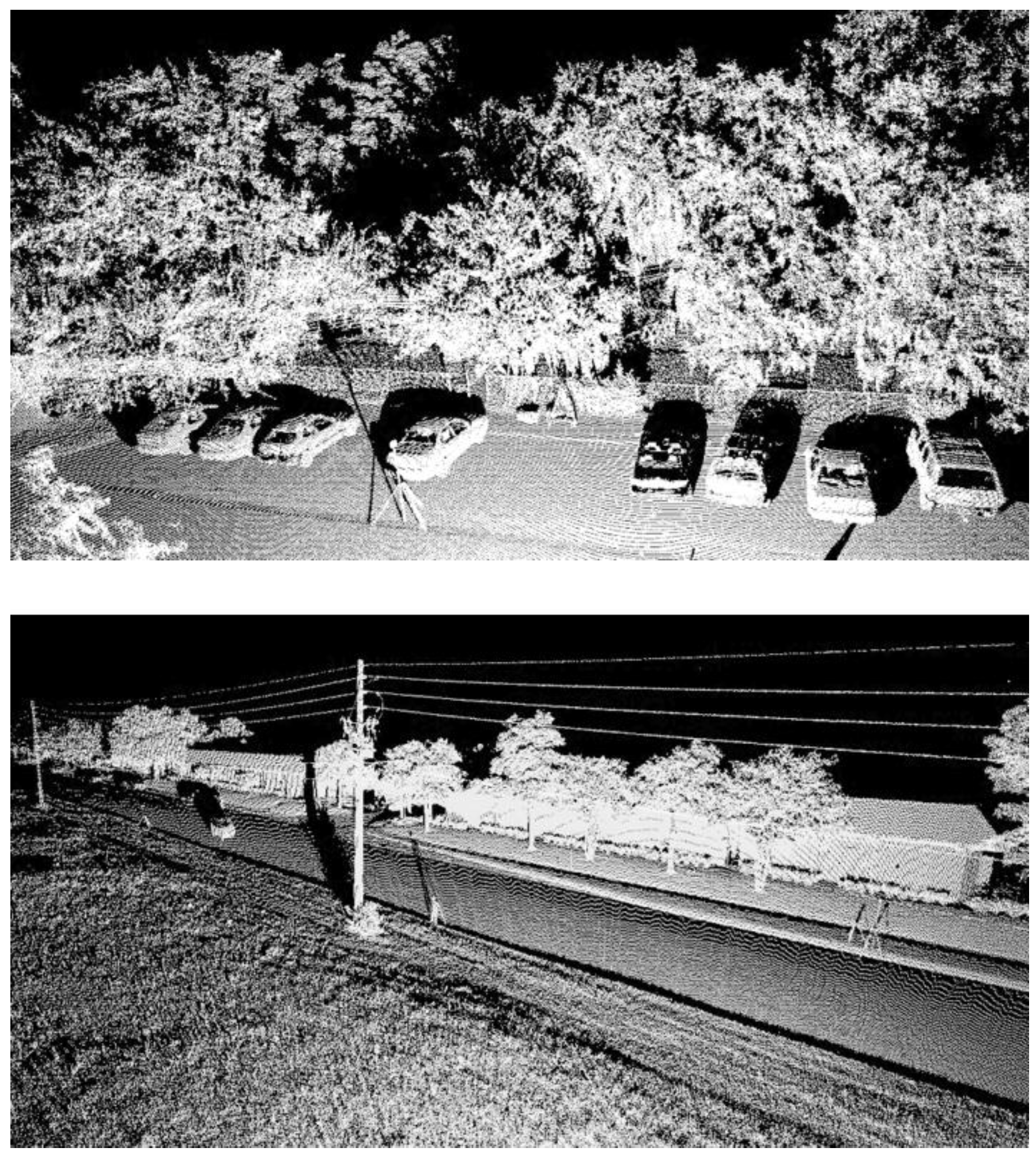
Figure 4 shows point clouds from both data acquisitions. Riegl cylindrical retroreflector targets with 10 cm height and 10 cm diameter were used at both sites, and were fine-scanned such that the target was covered with approximately 10,000 points for approximate location determination via the scanner software. Although some targets were located relatively close to the scanner, as illustrated in
Figure 3, no substantial ill effects of this on positional accuracy were observed. DAS data was collected at each site with effective stops lasting 30–60 seconds at 15° increments of a full 360° rotation. ICP was implemented using a precursor to the variant described in [
26].
Multiple configurations, adjustments with different combinations of observations, were executed and the resulting estimated uncertainty and accuracy based on check points were recorded. The abbreviations in
Table 1 are used to indicate which observations were used for each configuration. Nikon D300 and a Nikon D700 digital cameras fixed to the scanner were used at Site 1 and 2, respectively, to acquire imagery. Image observations included 308 individually measured image points (~1 pixel standard deviation) from 47 unique object space points in the Site 1 dataset, and 320 individually measured image points (~0.4 pixel standard deviation) from 73 unique object space points in the Site 2 dataset. Observations from ICP could only be made for three adjacent scans in the Site 2 dataset, due to presence of vegetation and occlusions illustrated in
Figure 3 and
Figure 4, exemplifying a fundamental problem with point cloud matching techniques in general.
Figure 3.
Test locations at Site 1 in Corry Village (left) and Site 2 in Orlando (right). Site 1 is characterized by dense tree-cover and multiple buildings which constrained the distribution of targets. Site 2 allowed for a wider target distribution. Units of the arbitrary project coordinate system are in meters (Map data: © Google).
Figure 3.
Test locations at Site 1 in Corry Village (left) and Site 2 in Orlando (right). Site 1 is characterized by dense tree-cover and multiple buildings which constrained the distribution of targets. Site 2 allowed for a wider target distribution. Units of the arbitrary project coordinate system are in meters (Map data: © Google).
Figure 4.
Single-station point clouds at Site 1 from approximately the perspective of Station 3 looking northeast (top), and Site 2 from approximately the perspective of Station 1 looking northeast (bottom).
Figure 4.
Single-station point clouds at Site 1 from approximately the perspective of Station 3 looking northeast (top), and Site 2 from approximately the perspective of Station 1 looking northeast (bottom).
Table 1.
Observation Abbreviations.
Table 1.
Observation Abbreviations.
| Abbreviation | Observations | Description |
|---|
| CL | Collinearity | Image observations in the form of manually-mensurated conjugate points were included in the adjustment via the collinearity condition |
| CP | Coplanarity | Image observations in the form of manually-mensurated conjugate points were included in the adjustment via the coplanarity condition |
| PODAS | Position Only DAS | Only the position of the scanner derived from the DAS was used. This can be used to compare against more-conventional single-antenna systems, since the observations are similar (only position) |
| HLDAS | High Level DAS | High-level DAS observations were included |
| MLDAS | Medium Level DAS | Medium-level DAS observations were included |
| ICP | Iterative Closest Point | Iterative-closest-point observations were included |
5. Conclusions
Previous studies showed that using a dual GNSS antenna system (DAS) attached to a terrestrial laser scanner (TLS) can eliminate the need for artificial targets in georeferencing and registration since it provides both the position and angular orientation of the scanner directly. However these initial studies indicated that this was at the cost of accuracy especially in unfavorable GNSS conditions, provided only rudimentary methods for processing the data, and lacked guidance for simultaneous adjustment of scan data from multiple vantages. This paper extended that work by addressing these deficiencies. Specifically, new methods for rigorously registering and georeferencing TLS data using a DAS and photogrammetric data via a scanner-mounted camera were described, along with a model that accommodates these sensors that can serve as a general framework for error-propagation, uncertainty estimation, and adjustment of TLS data from similar systems.
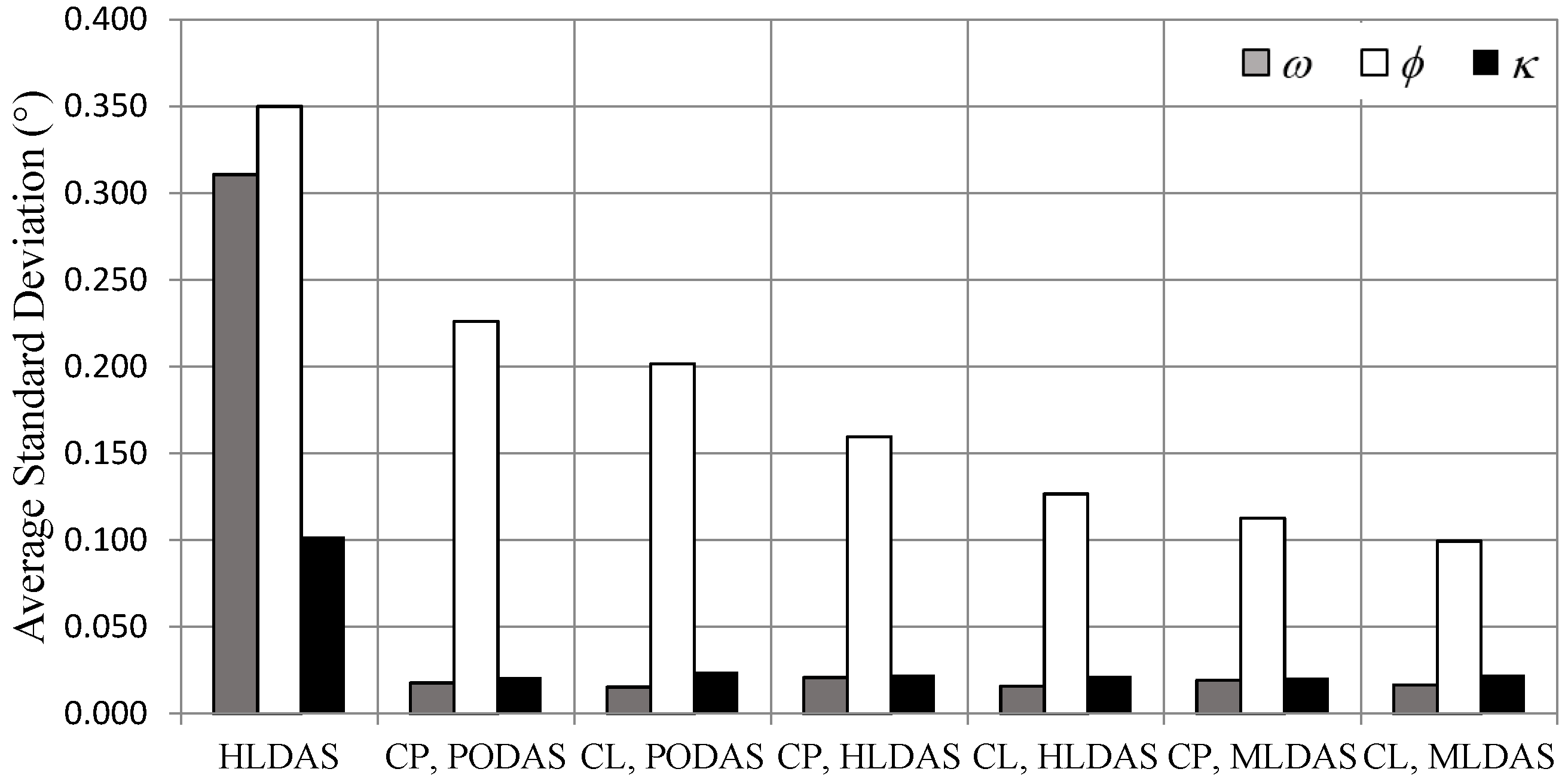
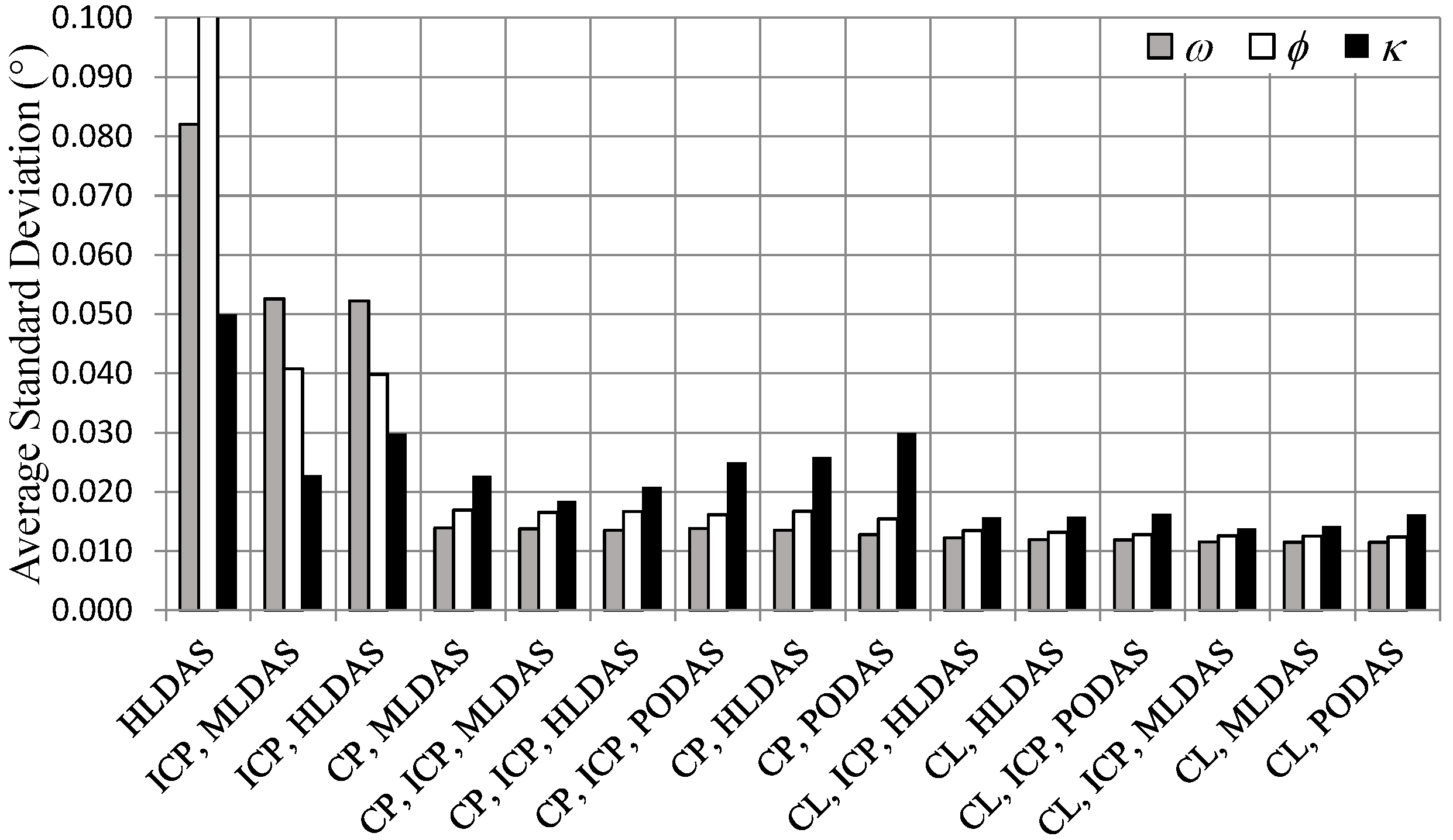
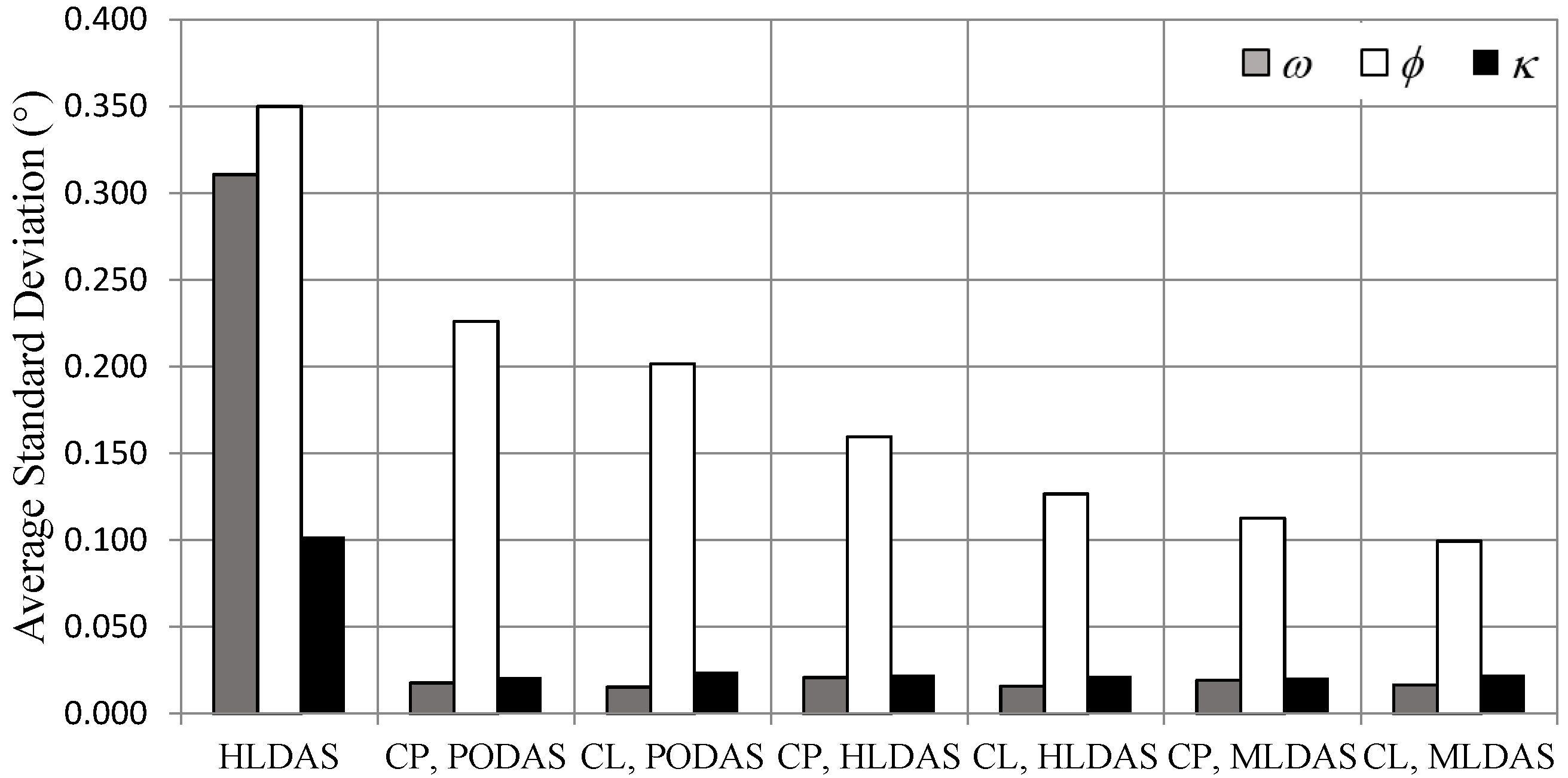
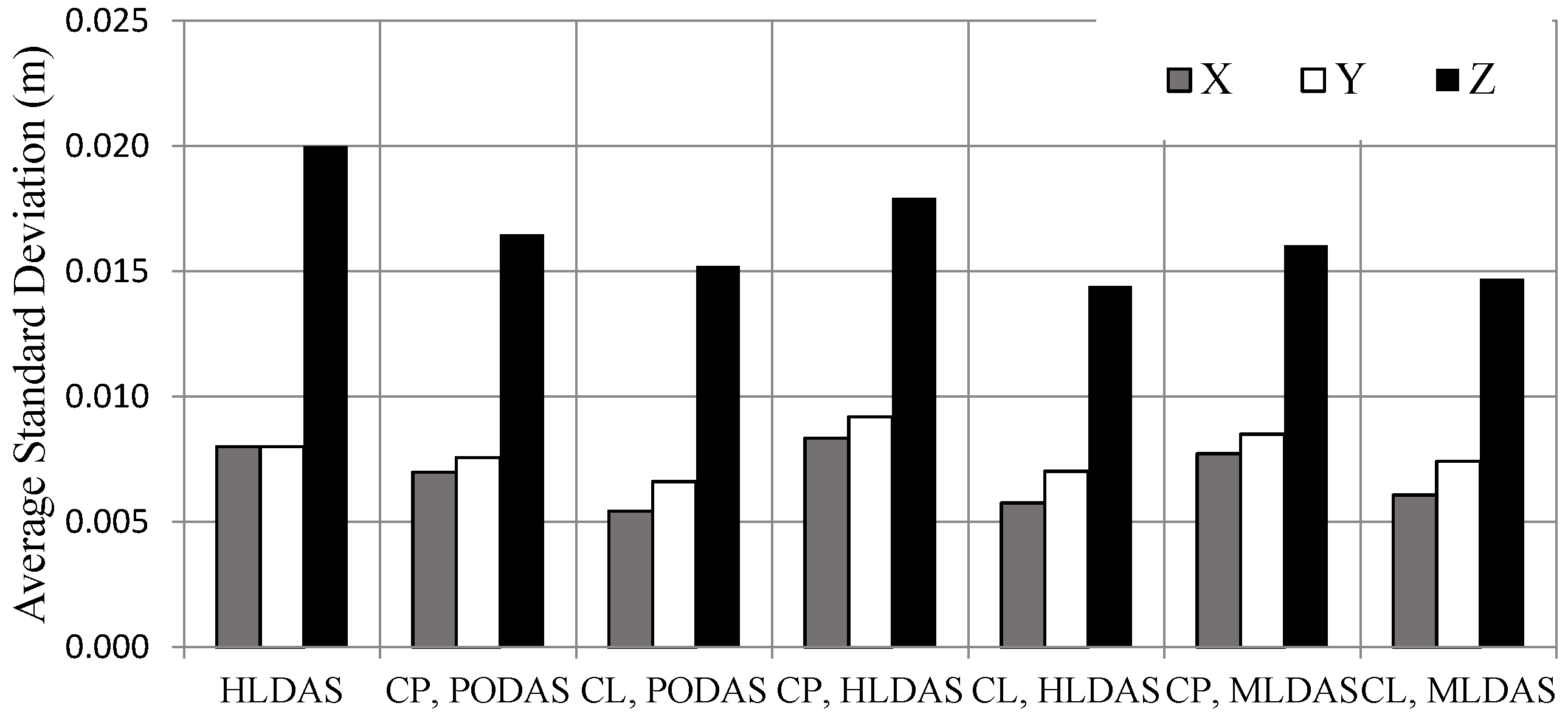
Results from tests of multiple combinations of various techniques and observations were given, showing that including “lower-level” DAS observations (vectors between GNSS antennas as opposed to independently-determined angles) in comprehensive data adjustment results in higher accuracy, and that angular observations from the DAS significantly increased data accuracy compared to conventional single-antenna methods. Likewise, it was shown that the inclusion of photogrammetric observations in DAS-based adjustments can be used to effectively register and adjust data from multiple scan stations, and significantly improve TLS data accuracy. The inclusion of camera observations, which can easily be obtained from many contemporary TLS systems, in combination with DAS observations is a viable option for project areas where target placement is impeded and point cloud matching methods cannot be used due to lack of suitable features or complex scenes such as those that are highly-vegetated. These methods were shown to be feasible ways to reduce or eliminate the need for artificial targets in registering and georeferencing TLS data while maintaining useable accuracy.
Datasets from two study sites were used for testing. The first site was characterized by weak geometry of the scanner stations, which were constrained to being placed along a corridor, and poor GNSS signal reception. Using the DAS alone yielded horizontal and vertical accuracy of 0.10 m RMSE and 1.432 m RMSE for check points, respectively. Including photogrammetric observations in the adjustment significantly improved the accuracy, with best results of 0.021 m RMSE and 0.023 m RMSE for horizontal and vertical point coordinates, respectively. This showed that these observations can mitigate uncertainty, especially in tilt components of the scanner that manifest in the poor vertical accuracy of points.
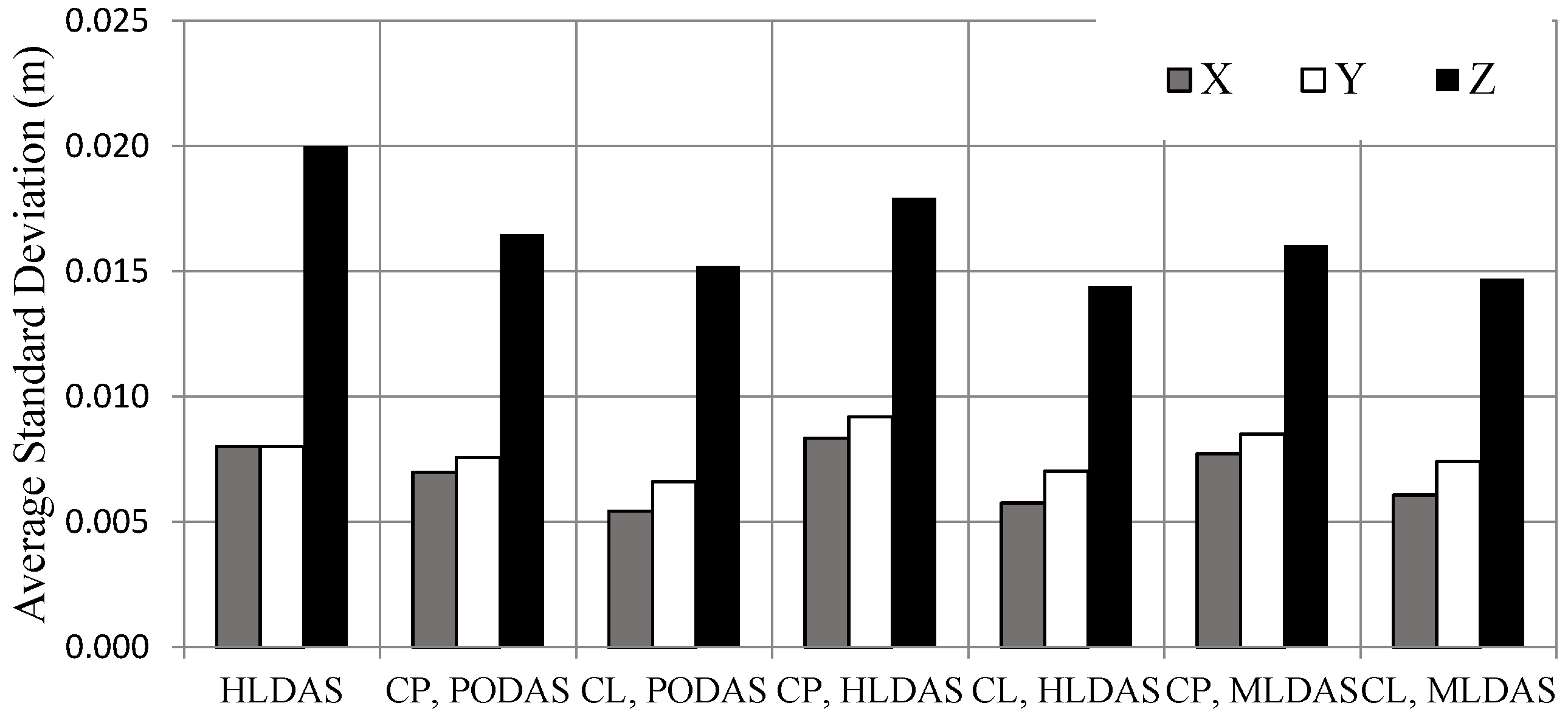
The second site had much more favorable conditions and therefore stronger geometry, with scanner stations well-distributed around the project area. Results from using the DAS alone demonstrated higher accuracy than in the first site, with horizontal and vertical check-point RMSEs of 0.017 m and 0.146 m, respectively. Still, the inclusion of photogrammetric observations significantly increased the accuracy, with the best solution achieving 0.010 m RMSE and 0.011 m RMSE for the horizontal and vertical components, respectively. In one exemplary case, when using coplanarity-based photogrammetric observations, the solution that used only position (simulating a single-antenna system) yielded 0.025 m RMSE and 0.017 RMSE for the horizontal and vertical components, whereas when using the same photogrammetric observations and full DAS observations, the horizontal RMSE was 0.009, and the vertical RMSE was 0.015. As mentioned previously, low-level DAS solutions were generally more accurate than high-level solutions, and although the differences between the two are not always statistically significant, it is recommended to use low-level DAS.
Also explored was the method of including photogrammetric observations. The coplanarity model was found to be ten times faster in implementation than collinearity. However, using coplanarity sometimes led to solution instability. Although the instability was mitigated by using the Levenburg-Marquardt Algorithm, care should be taken when using this model for photogrammetric adjustment, especially in extreme geometric configurations.
Many of the observations in this work were obtained or processed manually. This includes the initial processing of the GNSS vectors associated with the DAS and the tie-point image observations, both of which take a significant amount of time. Since the overarching goal of this work is to provide accurate, direct, targetless methods for georeferencing TLS data automatically, future work will include investigating automatic methods for both the DAS processing steps and conjugate image point generation. There are many viable methods for automatic image matching. The starting point for automating the DAS processing was presented in this paper and involves separating the horizontal and vertical components of the GNSS vectors. It is envisioned that future iterations will allow for collection of DAS data during scan acquisition and automatic generation of DAS observations.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}