
Assessing Metrics for Estimating Fire Induced Change in the Forest Understorey Structure Using Terrestrial Laser Scanning

 ,
, 
 and
and
Abstract
:
1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Property | Metric Type | Scale | LiDAR Platform | Application | Study |
|---|---|---|---|---|---|---|
| Proportion of corrected number of understorey laser hits | Cover | Point Density | Landscape | Airborne | Fire behaviour modelling | Riano et al. [15] |
| Proportion of corrected number of understorey laser hits | Cover | Point Density | Plot | Airborne | Ecological and forestry | Goodwin [38] |
| Presence or absence of laser points within each cm3 space | Volume | Point density | Plot | Terrestrial | Fire behaviour modelling | Loudermilk et al. [15] |
| % of ground returns % of returns between 1 and 2.5 m | Cover Distribution | Point Density | Plot | Airborne | Ecological management | Martinuzzi et al. [18] |
| Difference between pre- and post-fire LiDAR elevation | Cover Biomass | Height | Landscape | Airborne | Fire severity | Wang and Glen [39] |
| Variety of height metrics Ratio of Points Above and Below the Inflection Point | Cover | Both Point Density and Height | Plot | Terrestrial | Fire behaviour modelling | Rowel and Seielstad [17] |
| Proportion of number of understorey laser hits after applying intensity filter Number of LiDAR points per square metre under 1.5 m | Cover | Point Density | Plot | Airborne | Ecological management | Wing et al. [40] |
| Variety of Height-based Metrics | Cover Height | Height | Plot | Airborne | Wildfire behaviour modelling | Jakubowski et al. [14] |
2. Method
2.1. Study Area and Field Data

2.2. Terrestrial Laser Scanner and Surveys
| Specification Type | Specification Value |
|---|---|
| Calibrated range | 80 m to 90% reflective surface, 50 m to 18% reflective surface |
| Scan rate | 54,000 points per second |
| Output angle accuracy | 0.002° = 35 μrad (horizontal and vertical) |
| Vertical scanning angle | 300° |
| Horizontal scanning angle | 360° |
| Spot size | 8 mm @ 25 m; 13 mm @ 50 m |
| Laser wavelength | 660 nm (red) |
| Weight | 11.8 kg |
| Dimensions (LxWxH) | 12 × 52 × 35.5 cm |
| Power consumption | 50 W |
2.3. Point Cloud Pre-Processing
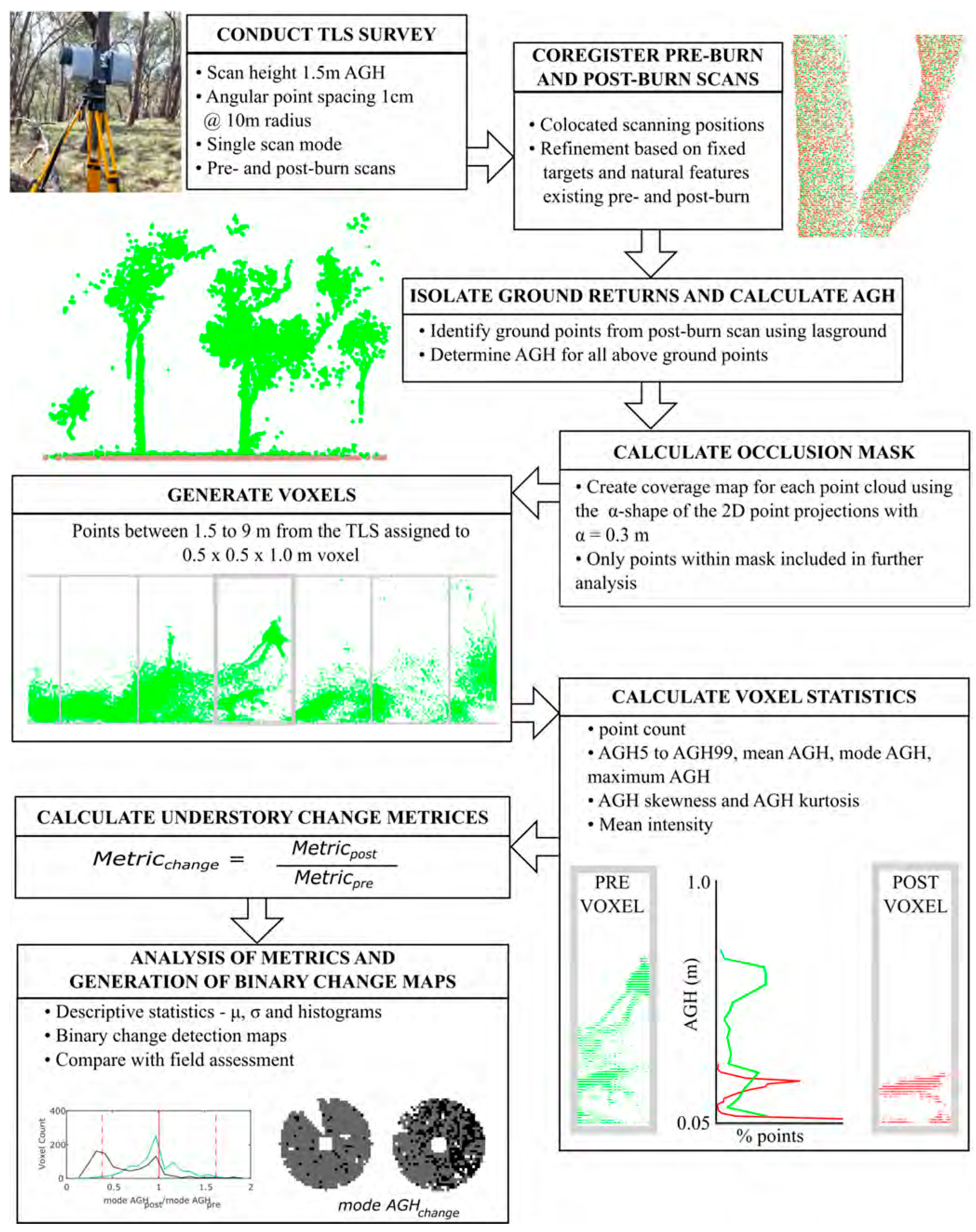
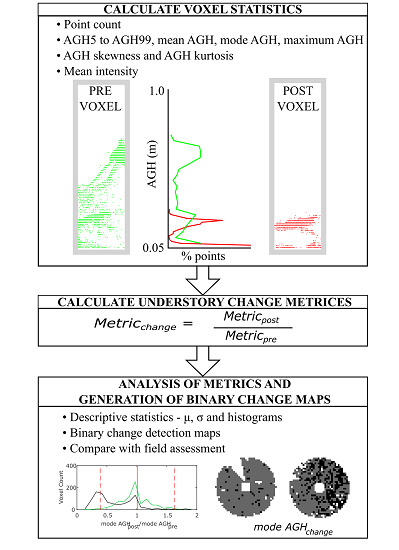
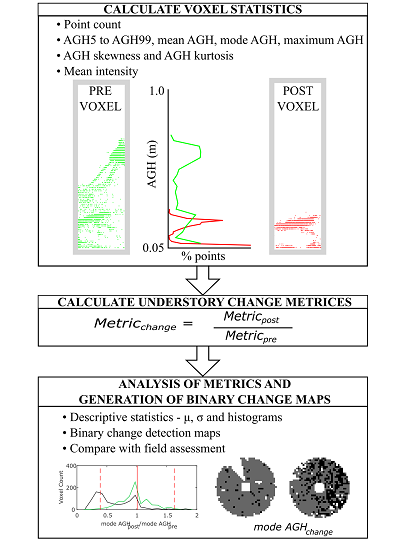
2.4. Metric Extraction
| Metric Name | Metric Description |
|---|---|
| AGH10, AGH20…AGH90, AGH95 | Above Ground Height Percentiles (AGH50 is median height) |
| AGH mean | Mean Above Ground Height |
| AGH mode | Mode Above Ground Height |
| AGH maximum | Maximum Above Ground Height |
| AGH skewness | Skewness of Above Ground Height |
| AGH kurtosis | Kurtosis of Above Ground Height |
| Mean intensity | Mean intensity of TLS returns |
| Point count | Point count of TLS returns |
2.5. Occlusion Impact Assessment
2.6. Metric Assessment
3. Results
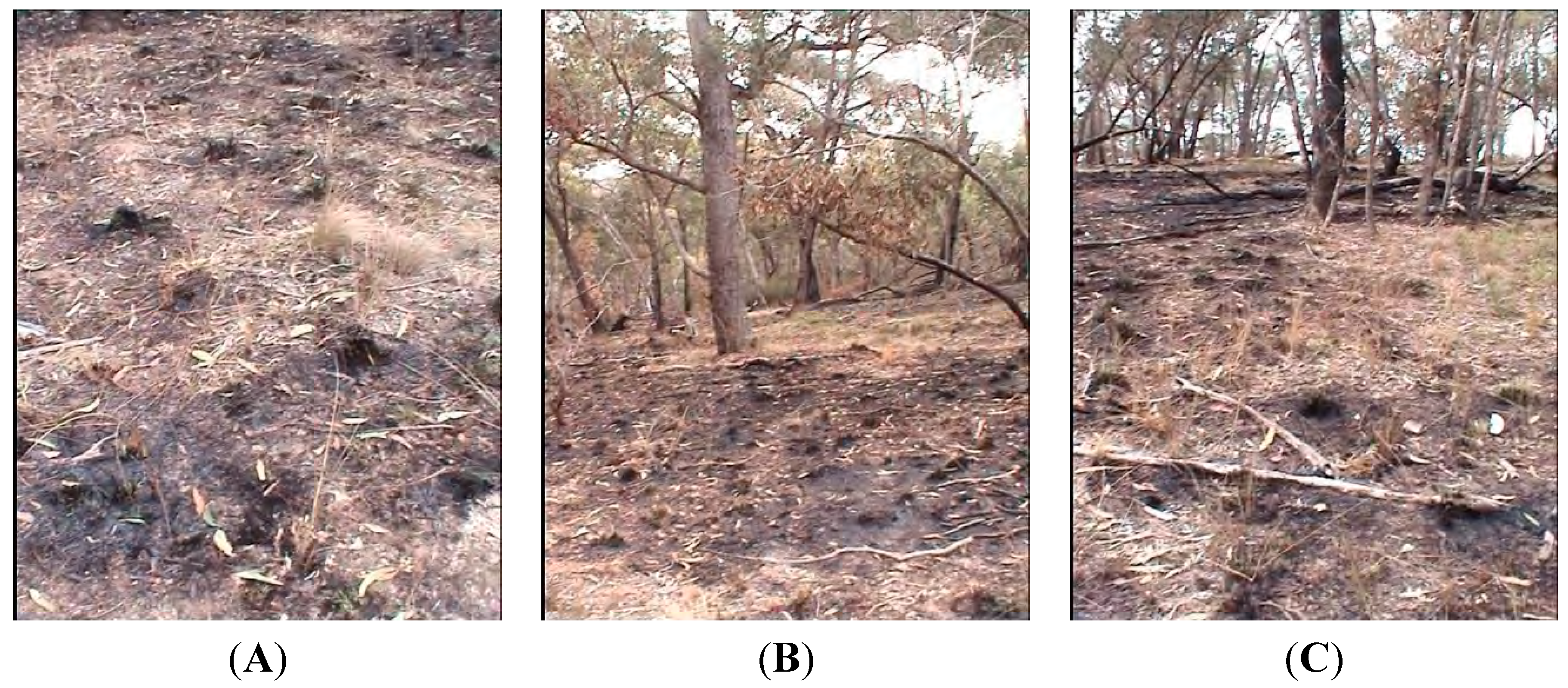
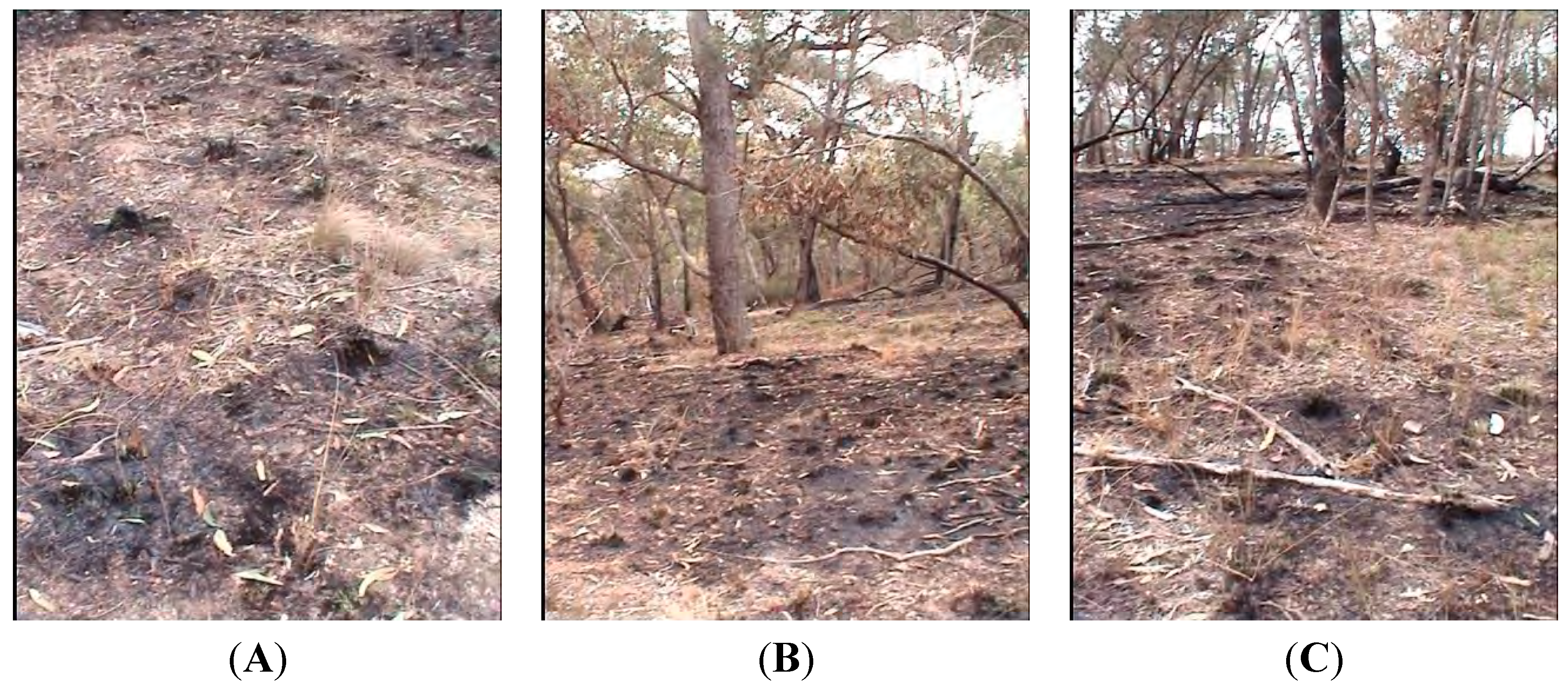
3.1. Field Assessment
3.2. TLS Change Detection
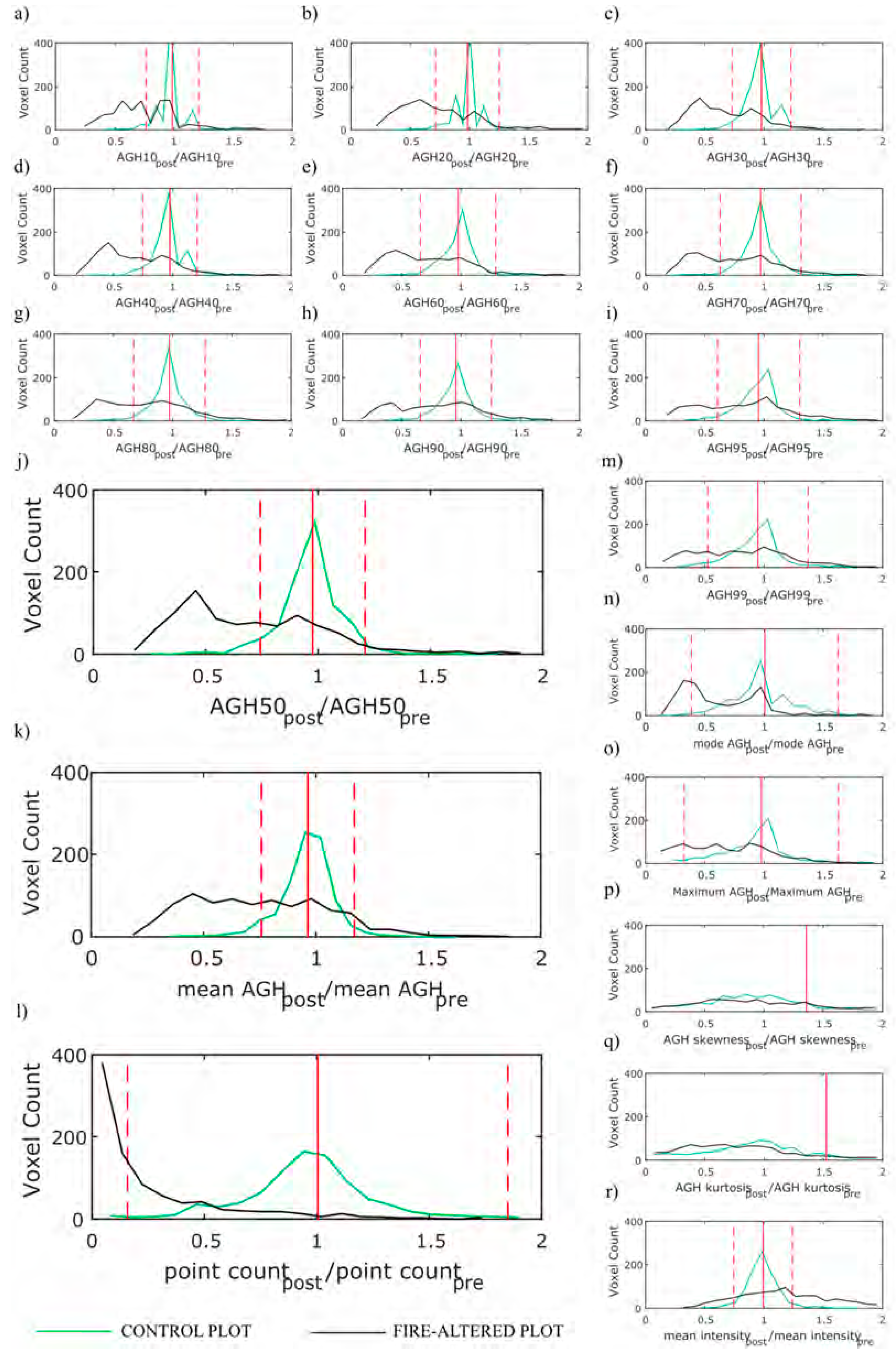
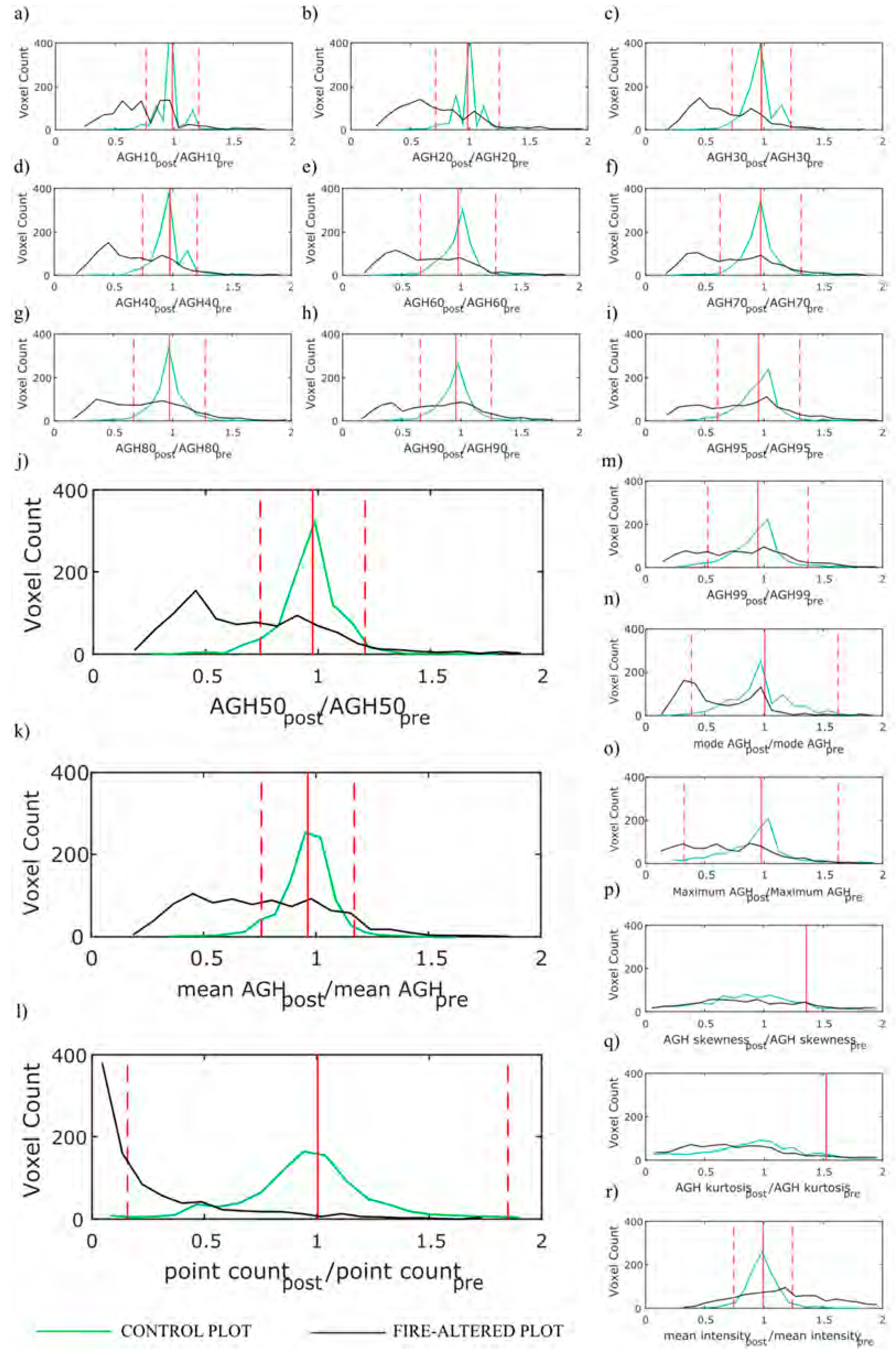
3.2.1. Descriptive Statistics
| Metric | Control Plot | Fire-Altered Plot | ||||||
|---|---|---|---|---|---|---|---|---|
| Statistic | Change | Statistic | Change | |||||
| Mean (µ) | Standard Deviation (σ) | Number of Voxels | % of Voxels (n = 872) | Mean (µ) | Standard Deviation (σ) | Number of Voxels | % of Voxels (n = 925) | |
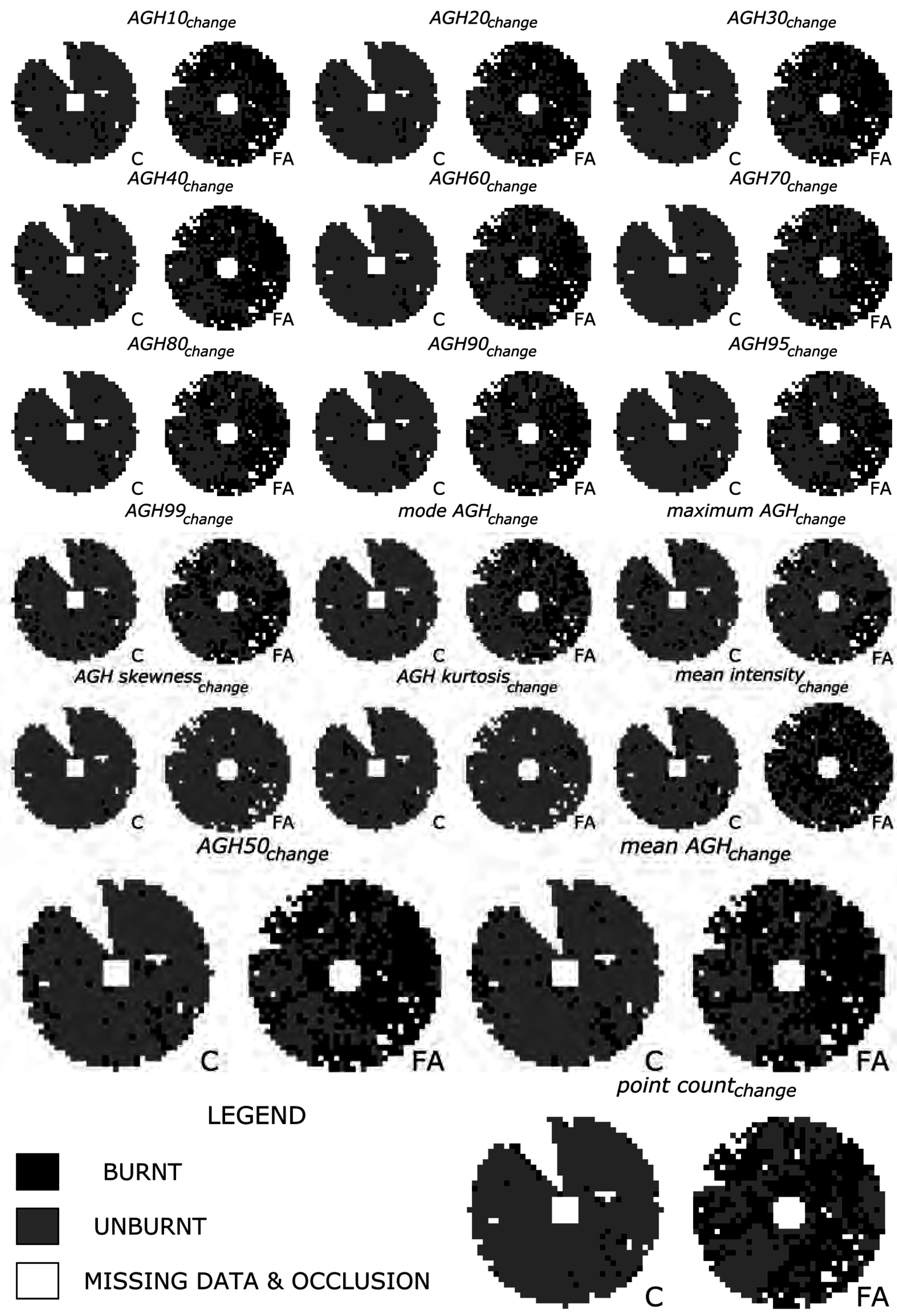
| AGH10change | 0.99 | 0.14 | 60 | 7 | 0.76 | 0.38 | 587 | 63 |
| AGH20change | 0.98 | 0.16 | 41 | 5 | 0.72 | 0.37 | 571 | 62 |
| AGH30change | 0.98 | 0.15 | 57 | 7 | 0.72 | 0.38 | 604 | 65 |
| AGH40change | 0.98 | 0.14 | 78 | 9 | 0.71 | 0.37 | 623 | 67 |
| AGH50change | 0.98 | 0.14 | 64 | 7 | 0.72 | 0.36 | 598 | 65 |
| AGH60change | 0.97 | 0.19 | 32 | 4 | 0.74 | 0.37 | 491 | 53 |
| AGH70change | 0.97 | 0.21 | 31 | 4 | 0.76 | 0.38 | 449 | 49 |
| AGH80change | 0.96 | 0.18 | 44 | 5 | 0.79 | 0.39 | 475 | 51 |
| AGH90change | 0.95 | 0.18 | 56 | 6 | 0.82 | 0.42 | 451 | 49 |
| AGH95change | 0.95 | 0.21 | 54 | 6 | 0.85 | 0.44 | 400 | 43 |
| AGH99change | 0.95 | 0.26 | 69 | 8 | 0.82 | 0.44 | 344 | 37 |
| mean AGHchange | 0.96 | 0.13 | 70 | 8 | 0.76 | 0.32 | 563 | 61 |
| mode AGHchange | 1.01 | 0.38 | 39 | 4 | 0.70 | 0.54 | 320 | 35 |
| maximum AGHchange | 0.98 | 0.40 | 70 | 8 | 0.70 | 0.38 | 199 | 22 |
| AGH skewnesschange | 1.36 | 10.91 | 6 | 1 | 1.39 | 17.06 | 26 | 3 |
| AGH kurtosischange | 1.53 | 2.84 | 29 | 3 | 1.29 | 2.09 | 19 | 2 |
| point countchange | 1.00 | 0.45 | 37 | 4 | 0.48 | 1.67 | 653 | 71 |
| mean intensitychange | 0.99 | 0.15 | 64 | 7 | 1.19 | 0.41 | 506 | 55 |
| Metric | Control Plot | Fire-Altered Plot | ||
|---|---|---|---|---|
| Mean (µ) | Standard Deviation (σ) | Mean (µ) | Standard Deviation (σ) | |
| AGH95 | 2 cm | 7 cm | 6 cm | 16 cm |
| AGH99 | 3 cm | 11 cm | 9 cm | 20 cm |
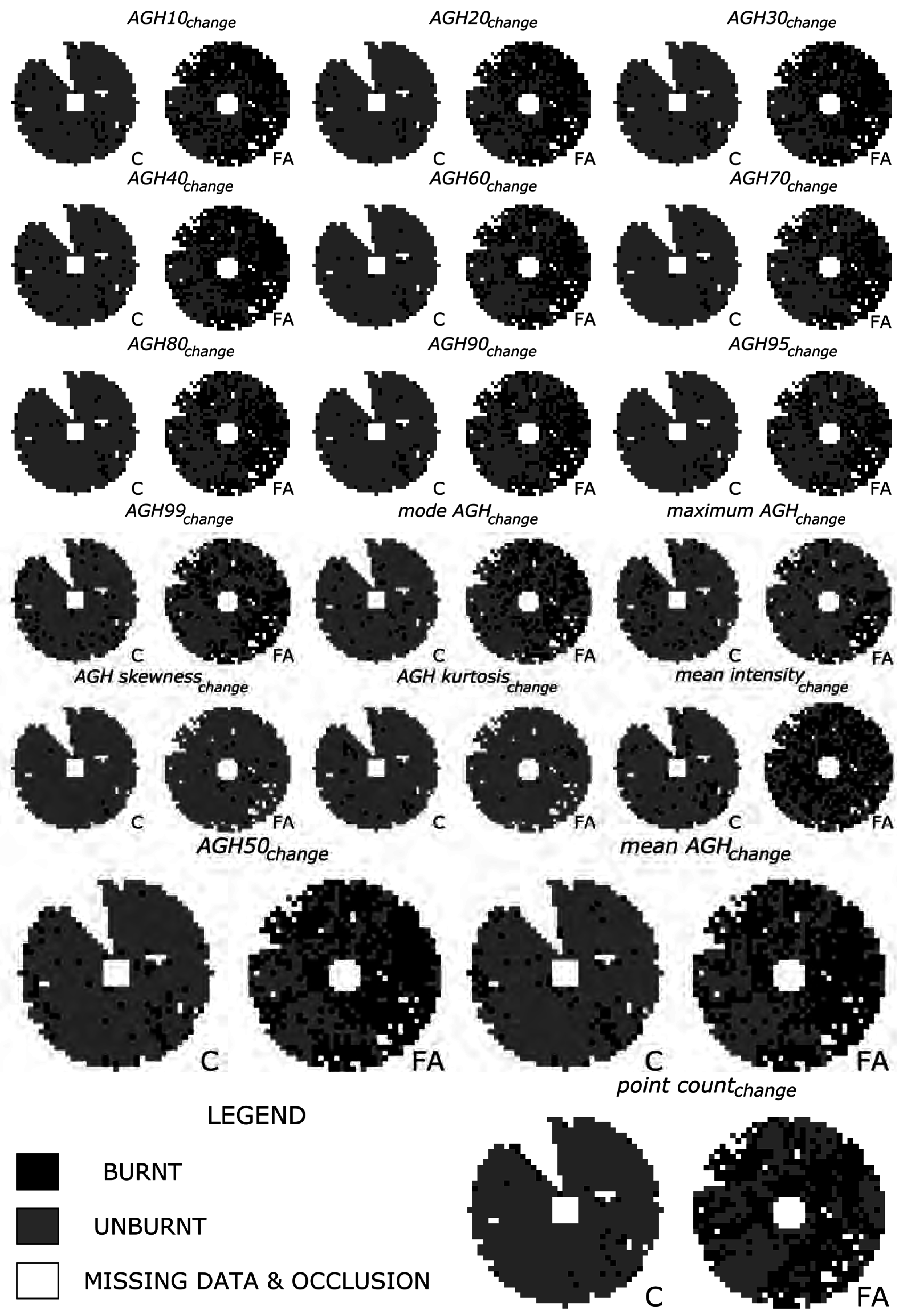
3.2.2. Spatial Distribution of Change
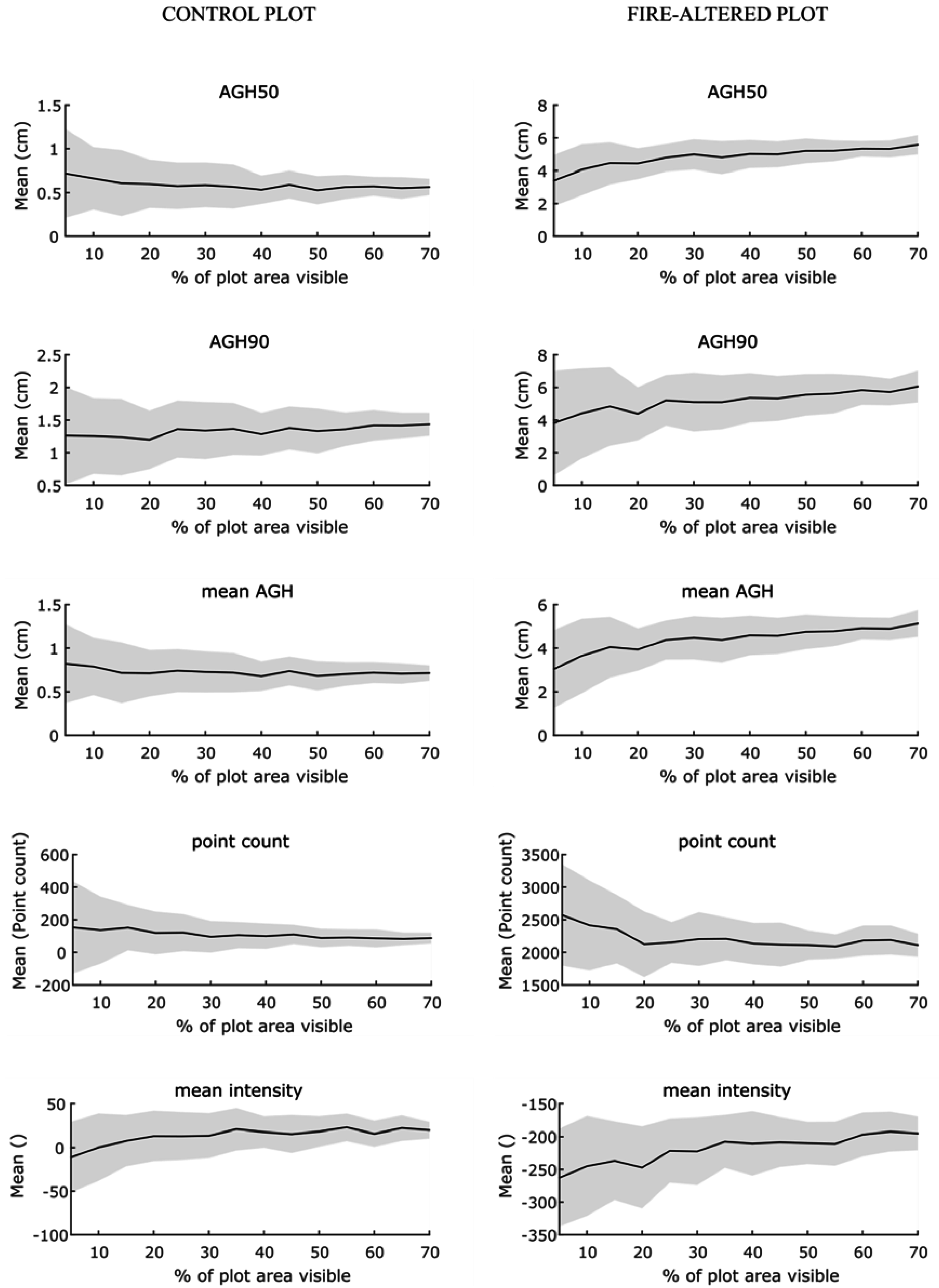
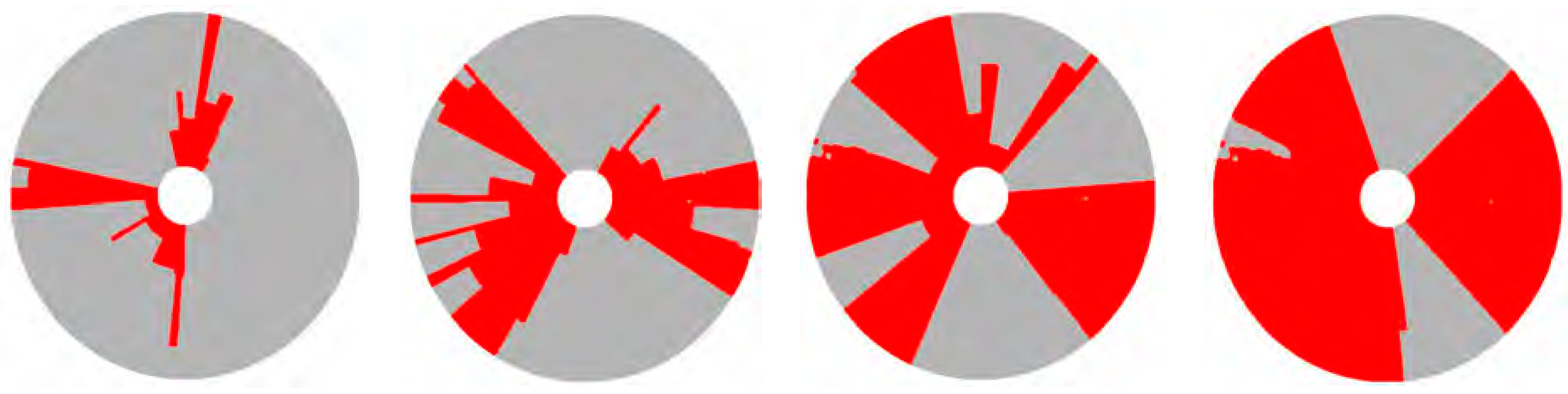
3.2.3. Effects of Occlusion

4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Roy, D.P.; Lewis, P.E.; Justice, C.O. Burned area mapping using multi-temporal moderate spatial resolution data—A bi-directional reflectance model-based expectation approach. Remote Sens. Environ. 2002, 83, 263–286. [Google Scholar] [CrossRef]
- Gill, A.M. Fire and the Australian flora: A review. Aust. For. 1975, 38, 4–25. [Google Scholar] [CrossRef]
- Penman, T.D.; Kavanagh, R.P.; Binns, D.L.; Melick, D.R. Patchiness of prescribed burns in dry sclerophyll eucalypt forests in South-eastern Australia. For. Ecol. Manag. 2007, 252, 24–32. [Google Scholar] [CrossRef]
- Fernandes, P.M.; Botelho, H.S. A review of prescribed burning effectiveness in fire hazard reduction. Int. J. Wildland Fire 2003, 12, 117–128. [Google Scholar] [CrossRef]
- Leigh, J.H.; Noble, J.C. The role of fire in the management of rangelands in Australia. In Fire and the Australian Biota; Grove, R.H., Noble, I.R., Eds.; Australian Academy of Science: Canberra, Australia, 1981; pp. 471–495. [Google Scholar]
- Victorian Lands Alliance. Fuel Reduction Burning in Southern Australia’s Forests: A Review of Its Effectiveness as a Bushfire Management Tool 2010; Victorian Lands Alliance: Benalla, VIC, Australia, 2010. Available online: http://www.royalcommission.vic.gov.au/Documents/Document-files/Exhibits/SUBM-002-055-0031_R.pdf (accessed on 9 February 2015).
- Robichaud, P.R. Post-fire stabilization and rehabilitation. In Fire Effects on Soils and Restoration Strategies; Robichaud, P.R., Ed.; CRC Press: Boca Raton, FL, USA, 2009; pp. 299–320. [Google Scholar]
- Wittenberg, L.; Malkinson, D.; Beeri, O.; Halutzy, A.; Tesler, N. Spatial and temporal patterns of vegetation recovery following sequences of forest fires in a Mediterranean landscape, Mt. Carmel Israel. Catena 2007, 71, 76–83. [Google Scholar] [CrossRef]
- Lentile, L.B.; Morgan, P.; Hudak, A.T.; Bobbitt, M.J.; Lewis, S.A.; Smith, A.; Robichaud, P.R. Post-fire burn severity and vegetation response following eight large wildfires across the western United States. Fire Ecol. 2007, 3, 91–108. [Google Scholar] [CrossRef]
- Boby, L.A.; Schuur, E.A.G.; Mack, M.C.; Verbyla, D.; Johnstone, J.F. Quantifying fire severity, carbon, and nitrogen emissions in Alaska’s boreal forest. Ecol. Appl. 2010, 20, 1633–1647. [Google Scholar] [CrossRef] [PubMed]
- Key, C.H.; Benson, N.C. Landscape assessment: Ground measure of severity, the Composite Burn Index; and remote sensing of severity, the Normalized Burn Ratio. In FIREMON: Fire Effects Monitoring and Inventory System; Lutes, D.C., Lutes, D.C., Keane, R.E., Caratti, J.F., Key, C.H., Benson, N.C., Gangi, L.J., Eds.; USDA Forest Service, Rocky Mountain Research Station: Ogden, UT, USA, 2005. [Google Scholar]
- DSE. Remote Sensing of Fire Severity for Prescribed Burns: Field Assessment; Department of Sustainability and Environment: Melbourne, Australia, 2010.
- Hudak, A.T.; Evans, J.S.; Stuart Smith, A.M. LiDAR utility for natural resource managers. Remote Sens. 2009, 1, 934–951. [Google Scholar] [CrossRef]
- Jakubowski, M.K.; Guo, Q.; Collins, B.; Stephens, S.; Kelly, M. Predicting Surface fuel models and fuel metrics using Lidar and CIR imagery in a dense, mountainous forest. Photogramm. Eng. Remote Sens. 2013, 79, 37–49. [Google Scholar] [CrossRef]
- Loudermilk, E.L.; Hiers, J.K.; O’Brien, J.J.; Mitchell, R.J.; Singhania, A.; Fernandez, J.C.; Cropper, W.P.; Slatton, K.C. Ground-based LiDAR: A novel approach to quantify fine-scale fuelbed characteristics. Int. J. Wildland Fire 2009, 18, 676–685. [Google Scholar] [CrossRef]
- Riano, D.; Meier, E.; Allgower, B.; Chuvieco, E.; Ustin, S.L. Modeling airborne laser scanning data for the spatial generation of critical forest parameters in fire behavior modeling. Remote Sens. Environ. 2003, 86, 177–186. [Google Scholar] [CrossRef]
- Rowell, E.; Seielstad, C. Characterising grass, litter, and shrub fuels in longleaf pine forest pre- and post-fire using terrestrial LiDAR. In Proceedings of SilviLaser 2012, Vancouver, BC, Canada, 16–18 September 2012.
- Martinuzzi, S.; Vierling, L.A.; Gould, W.A.; Falkowski, M.J.; Evans, J.S.; Hudak, A.T.; Vierling, K.T. Mapping snags and understory shrubs for a LiDAR-based assessment of wildlife habitat suitability. Remote Sens. Environ. 2009, 113, 2533–2546. [Google Scholar] [CrossRef]
- Muukkonen, P.; Makipaa, R. Empirical biomass models of understorey vegetation in boreal forests according to stand and site attributes. Boreal Environ. Res. 2006, 11, 355–369. [Google Scholar]
- Dubayah, R.O.; Drake, J.B. LiDAR remote sensing for forestry. J. For. 2000, 98, 44–46. [Google Scholar]
- Kane, V.R.; McGaughey, R.J.; Bakker, J.D.; Gersonde, R.F.; Lutz, J.A.; Franklin, J.F. Comparisons between field-and LiDAR-based measures of stand structural complexity. Can. J. For. Res. 2010, 40, 761–773. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Acker, S.A.; Spies, T.A.; Parker, G.G.; Harding, D.J. LiDAR remote sensing of forest canopy structure and related biophysical parameters at H.J. Andrews Experimental Forest, Oregon, USA. In Natural Resources Management Using Remote Sensing and GIS; ASPRS: Washington, DC, USA, 1997; pp. 79–91. [Google Scholar]
- Lefsky, M.A.; Hudak, A.T.; Cohen, W.B.; Acker, S.A. Patterns of covariance between forest stand and canopy structure in the Pacific Northwest. Remote Sens. Environ. 2005, 95, 517–531. [Google Scholar] [CrossRef]
- Means, J.E.; Acker, S.A.; Fitt, B.J.; Renslow, M.; Emerson, L.; Hendrix, C.J. Predicting forest stand characteristics with airborne scanning LiDAR. Photogramm. Eng. Remote Sens. 2000, 66, 1367–1371. [Google Scholar]
- Meyer, V.; Saatchi, S.S.; Chave, J.; Dalling, J.; Bohlman, S.; Fricker, G.A.; Robinson, C.; Neumann, M. Detecting tropical forest biomass dynamics from repeated airborne LiDAR measurements. Biogeosci. Discuss 2013, 10, 1957–1992. [Google Scholar] [CrossRef]
- Naesset, E. Determination of mean tree height of forest stands using airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1997, 52, 49–56. [Google Scholar] [CrossRef]
- Watt, P.J.; Donoghue, D.N.M.; Dunford, R.W. Forest parameter extraction using terrestrial laser scanning. In Proceedings of ScandLaser Scientific Workshop on Airborne Laser Scanning of Forests, Umea, Sweden, 2–4 September 2003; pp. 237–244.
- Bienert, A.; Scheller, S.; Keane, E.; Mohan, F.; Nugent, C. Tree detection and diameter estimations by analysis of forest terrestrial laser scanner point clouds. In Proceedings of SilviLaser 2007, Espoo, Finland, 12–14 September 2007.
- Watt, P.J.; Donoghue, D.N.M. Measuring forest structure with terrestrial laser scanning. Int. J. Remote Sens. 2005, 26, 1437–1446. [Google Scholar] [CrossRef]
- Moskal, L.M.; Zheng, G. Retrieving forest inventory variables with terrestrial laser scanning (TLS) in urban heterogeneous forest. Remote Sens. 2011, 4, 1–20. [Google Scholar] [CrossRef]
- Huang, P.; Pretzsch, H. Using terrestrial laser scanner for estimating leaf areas of individual trees in a conifer forest. Trees 2010, 24, 609–619. [Google Scholar] [CrossRef]
- Jupp, D.L.B.; Culvenor, D.S.; Lovell, J.L.; Newnham, G.J.; Strahler, A.H.; Woodcock, C.E. Estimating forest LAI profiles and structural parameters using a ground-based laser called “Echidna®”. Tree Physiol. 2009, 29, 171–181. [Google Scholar] [CrossRef] [PubMed]
- Danson, F.M.; Hetherington, D.; Morsdorf, F.; Koetz, B.; Allgower, B. Forest canopy gap fraction from terrestrial laser scanning. IEEE Geosci. Remote Sens. Lett. 2007, 4, 157–160. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Holopainen, M.; Melkas, T. Detecting changes in forest structure over time with bi-temporal terrestrial laser scanning data. ISPRS Int. J. Geo-Inf. 2012, 1, 242–255. [Google Scholar] [CrossRef]
- Xiao, W.; Xua, S.; Elberinka, S.O.; Vosselmana, G. Change detection of trees in urban areas using mutil-temporal airborne LiDAR point clouds. Proc. SPIE 2012. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Kaartinen, H.; Maltamo, M. Automatic detection of harvested trees and determination of forest growth using airborne laser scanning. Remote Sens. Environ. 2004, 90, 451–462. [Google Scholar] [CrossRef]
- Wallace, L.O.; Watson, C.; Lucieer, A. Detecting pruning of individual stems using airborne laser scanning data captured from an unmanned aerial vehicle. Int. J. Appl. Earth Obs. Geoinf. 2014, 30, 76–85. [Google Scholar] [CrossRef]
- Goodwin, N.R. Assessing Understorey Structural Characteristics in Eucalypt Forests: An Investigation of LiDAR Techniques. Ph.D. Thesis, University of New South Wales, Sydney, Australia, 2006. [Google Scholar]
- Wang, C.; Glenn, N.F. Estimation of fire severity using pre-and post-fire LiDAR data in sagebrush steppe rangelands. Int. J. Wildland Fire 2009, 18, 848–856. [Google Scholar] [CrossRef]
- Wing, B.M.; Ritchie, M.W.; Boston, K.; Cohen, W.B.; Gitelman, A.; Olsen, M.J. Prediction of understory vegetation cover with airborne LiDAR in an interior ponderosa pine forest. Remote Sens. Environ. 2012, 124, 730–741. [Google Scholar] [CrossRef]
- Hines, F.; Tolhurst, K.; Wilson, A.; McCarthy, G. Overall Fuel Hazard Assessment Guide; Fire and Adaptive Management. Department of Sustainability and Environment: Melbourne, Australia, 2010. [Google Scholar]
- Isenburg, M.; Schewchuck, J. LAStools: Converting, Viewing and Compressing LiDAR Data in LAS Format. Available online: http://www.cs.unc.edu/~isenburg/lastools/ (accessed on 13 May 2015).
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Vierling, L.A.; Xu, Y.; Eitel, J.U.H.; Oldow, J.S. Shrub characterization using terrestrial laser scanning and implications for airborne LiDAR assessment. Can. J. Remote Sens. 2013, 38, 709–722. [Google Scholar] [CrossRef]
- Olsoy, P.J.; Glenn, N.F.; Clark, P.E. Estimating sagebrush biomass using terrestrial laser scanning. Rangel. Ecol. Manag. 2014, 67, 224–228. [Google Scholar] [CrossRef]
- Liang, X.; Litkey, P.; Hyyppa, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic stem mapping using single-scan terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 661–670. [Google Scholar] [CrossRef]
- Litkey, P.; Liang, X.; Kaartinen, H.; Hyyppä, J.; Kukko, A.; Holopainen, M. Single-scan TLS methods for forest parameter retrieval. In Proceedings of the 8th SilviLaser 2008, Edinburgh, UK, 17–19 September 2008.
- Turner, M.G.; Hargrove, W.W.; Gardner, R.H.; Romme, W.H. Effects of fire on landscape heterogeneity in Yellowstone National Park, Wyoming. J. Veg. Sci. 1994, 5, 731–742. [Google Scholar] [CrossRef]
- Price, O.; Russell-Smith, J.; Edwards, A. Fine-scale patchiness of different fire intensities in sandstone heath vegetation in northern Australia. Int. J. Wildland Fire 2003, 12, 227–236. [Google Scholar] [CrossRef]
- OoI, M.K.; Whelan, R.J.; Auld, T.D. Persistence of obligate-seeding species at the population scale: Effects of fire intensity, fire patchiness and long fire-free intervals. Int. J. Wildland Fire 2006, 15, 261–269. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gupta, V.; Reinke, K.J.; Jones, S.D.; Wallace, L.; Holden, L. Assessing Metrics for Estimating Fire Induced Change in the Forest Understorey Structure Using Terrestrial Laser Scanning. Remote Sens. 2015, 7, 8180-8201. https://doi.org/10.3390/rs70608180
Gupta V, Reinke KJ, Jones SD, Wallace L, Holden L. Assessing Metrics for Estimating Fire Induced Change in the Forest Understorey Structure Using Terrestrial Laser Scanning. Remote Sensing. 2015; 7(6):8180-8201. https://doi.org/10.3390/rs70608180
Chicago/Turabian StyleGupta, Vaibhav, Karin J. Reinke, Simon D. Jones, Luke Wallace, and Lucas Holden. 2015. "Assessing Metrics for Estimating Fire Induced Change in the Forest Understorey Structure Using Terrestrial Laser Scanning" Remote Sensing 7, no. 6: 8180-8201. https://doi.org/10.3390/rs70608180
APA StyleGupta, V., Reinke, K. J., Jones, S. D., Wallace, L., & Holden, L. (2015). Assessing Metrics for Estimating Fire Induced Change in the Forest Understorey Structure Using Terrestrial Laser Scanning. Remote Sensing, 7(6), 8180-8201. https://doi.org/10.3390/rs70608180