
DMSP-OLS Radiance Calibrated Nighttime Lights Time Series with Intercalibration



Abstract
:
1. Introduction
2. Methodology
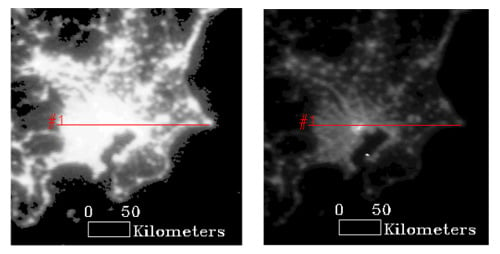
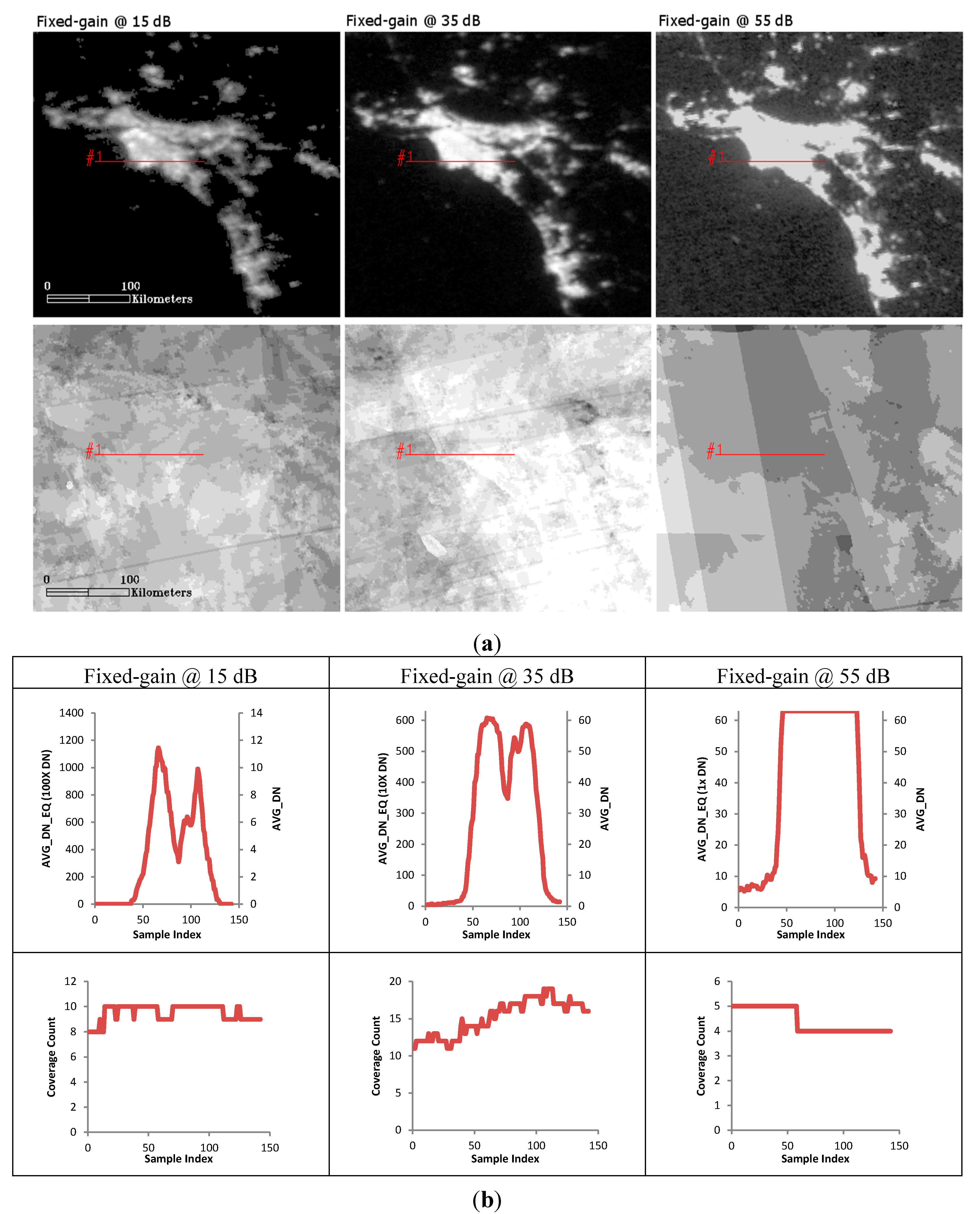
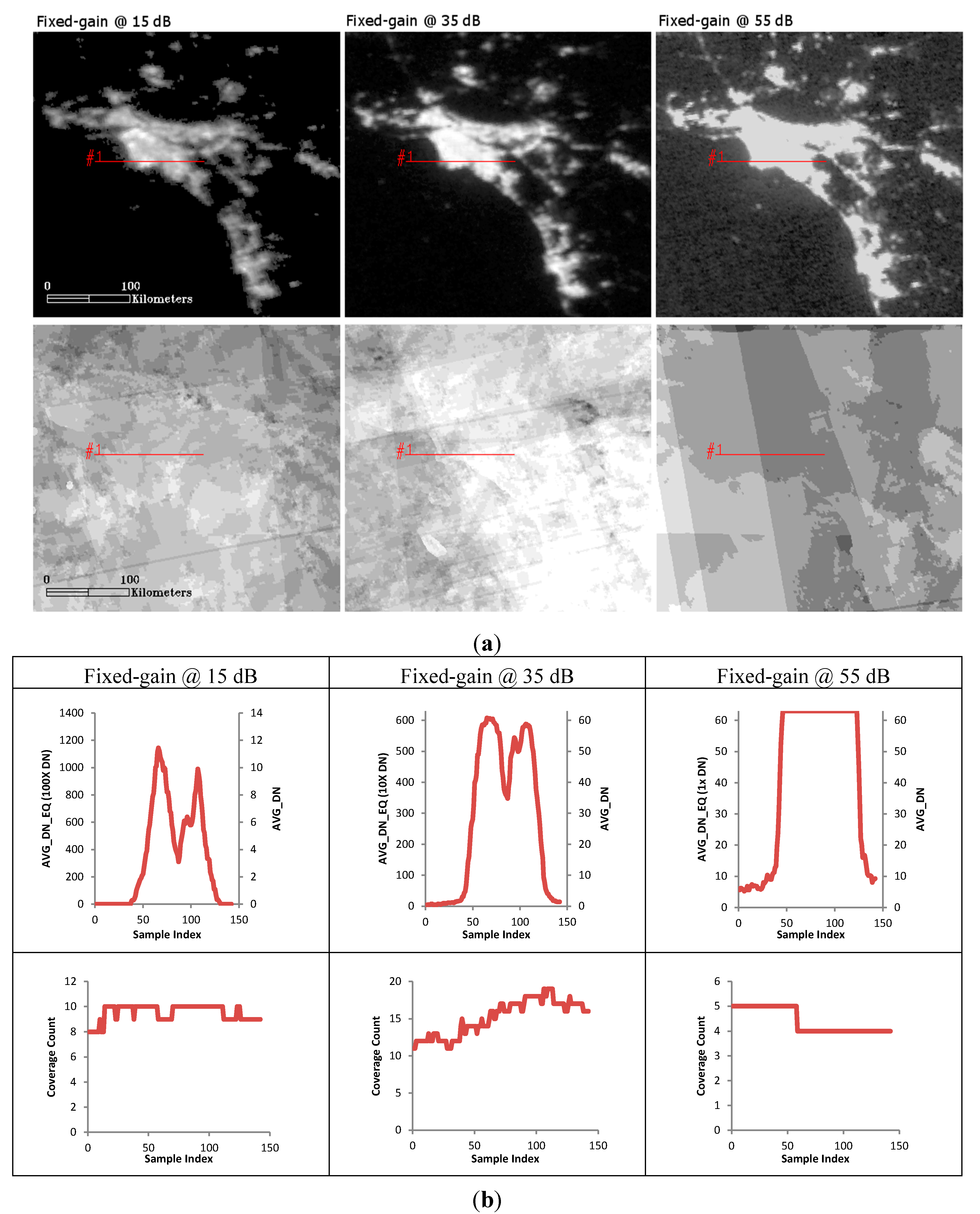
2.1. Preparation of Fixed-Gain Imagery Collection
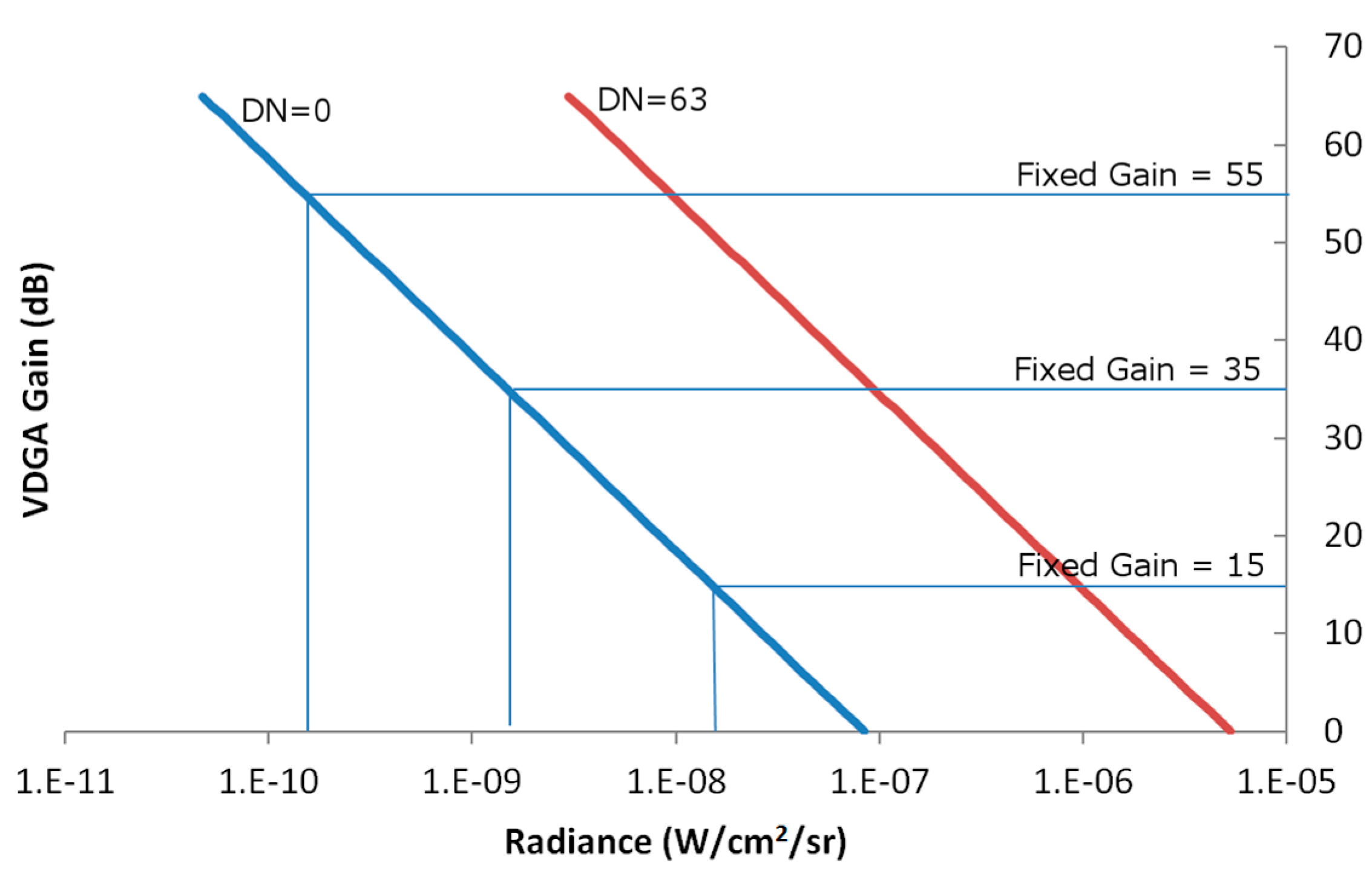
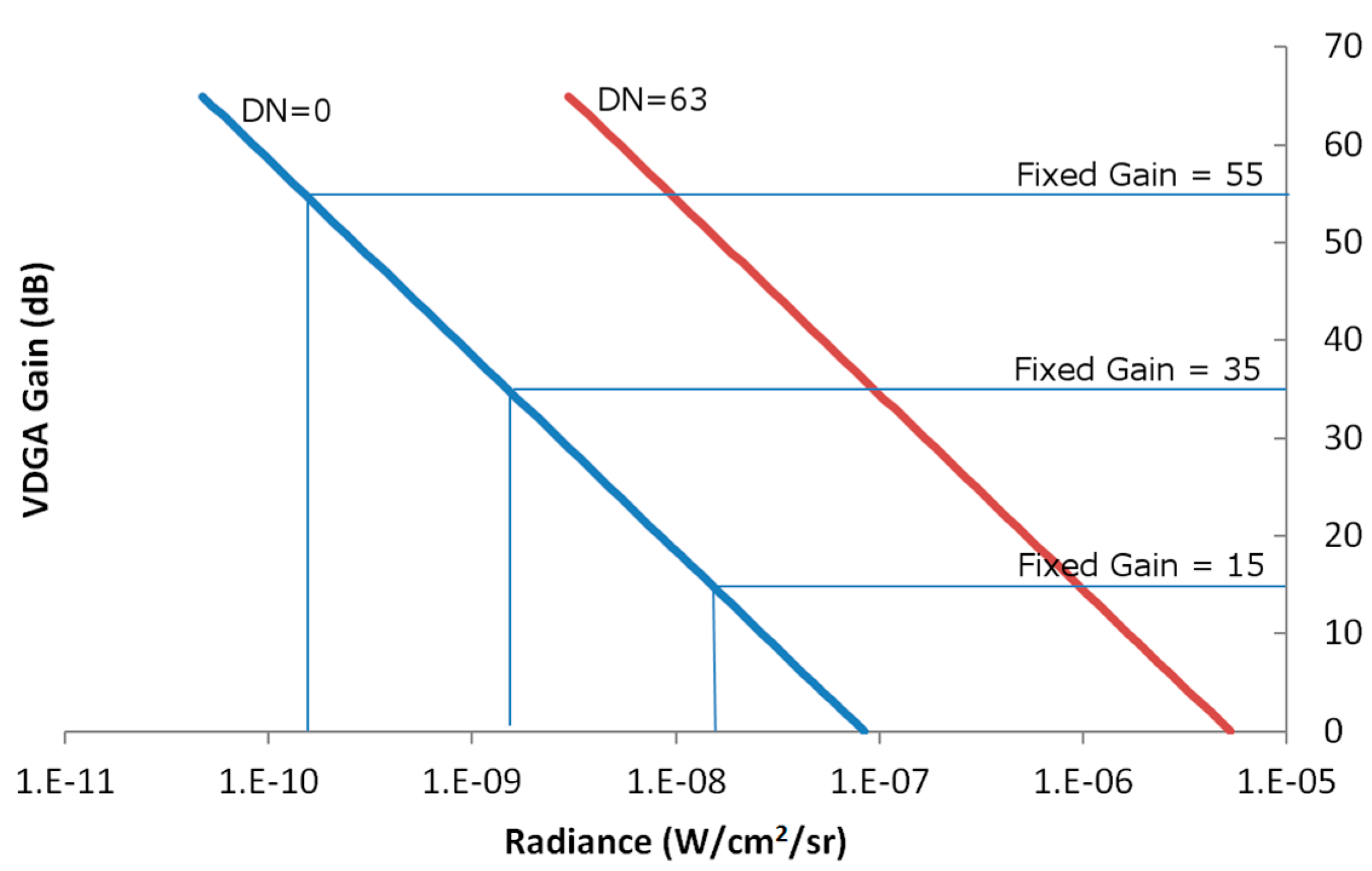
2.1.1. Instrument Gain

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Representative Satellite/Year | Fixed-Gain | Satellite/Period of Observation |
|---|---|---|
| F12_1997 | 24 | F12/19960316–19960324 |
| F12/19970105–19970212 | ||
| 40 | F12/19960316–19960324 | |
| 50 (b) | F12/19970105–19970212 | |
| STB* | F12/1997 | |
| F12_1999 | 15 | F12/19990119–19991211 |
| 35 | F12/19990119–19991211 | |
| 55 (b) | F12/19990119–19991211 | |
| STB | F14/1999 | |
| F12_2000 | 15 | F12/20000103–20001229 |
| F15/20000303–20000508 | ||
| 35 | F12/20000103–20001229 | |
| F15/20000303–20000508 | ||
| 55 (b) | F12/20000103–20001229 | |
| F15/20000303–20000508 | ||
| STB | F15/2000 | |
| F14_2003 | 15 | F14/20021230–20031127 |
| F15/20021230–20030205 | ||
| 35 | F14/20021230–20031127 | |
| F15/20021230–20030205 | ||
| 55 (b) | F14/20021230–20031127 | |
| F15/20021230–20030205 | ||
| STB | F15/2003 | |
| F14_2004 | 15 | F14/20040118–20041216 |
| 35 | F14/20040118–20041216 | |
| 55 (b) | F14/20040118–20041216 | |
| STB | F15/2004 | |
| F16_2006 | 15 | F16/20051128–20061224 |
| 35 | F16/20051128–20061224 | |
| 55 (b) | F16/20051128–20061224 | |
| STB | F16/2006 | |
| F16_2010 | 15 | F16/20100111–20101209 |
| F16/20110129–20110731 | ||
| 35 | F16/20100111–20101209 | |
| F16/20110129–20110731 | ||
| 50 (b) | F16/20100111–20101209 | |
| F16/20110129–20110731 | ||
| STB | F18/2010 |
2.1.2. Data Processing
| Flag Name | Indication | Prefer State |
|---|---|---|
| DAYTIME | Area of projected pixel is in daytime. | OFF |
| NIGHTTIME MARGINAL | Area of projected pixel is in transition zone between daytime and nighttime. | OFF |
| ZERO LUNAR ILLUMINANCE | Area of projected pixel is not affected by lunar illumination. | ON |
| CLOUDS PRESENT | Area of projected pixel is covered by clouds. | OFF |
| NO DATA | The pixel does not contain valid data in OLS imagery. | OFF |
2.2. Merge Fixed-Gain Data
2.2.1. Pre-Processing
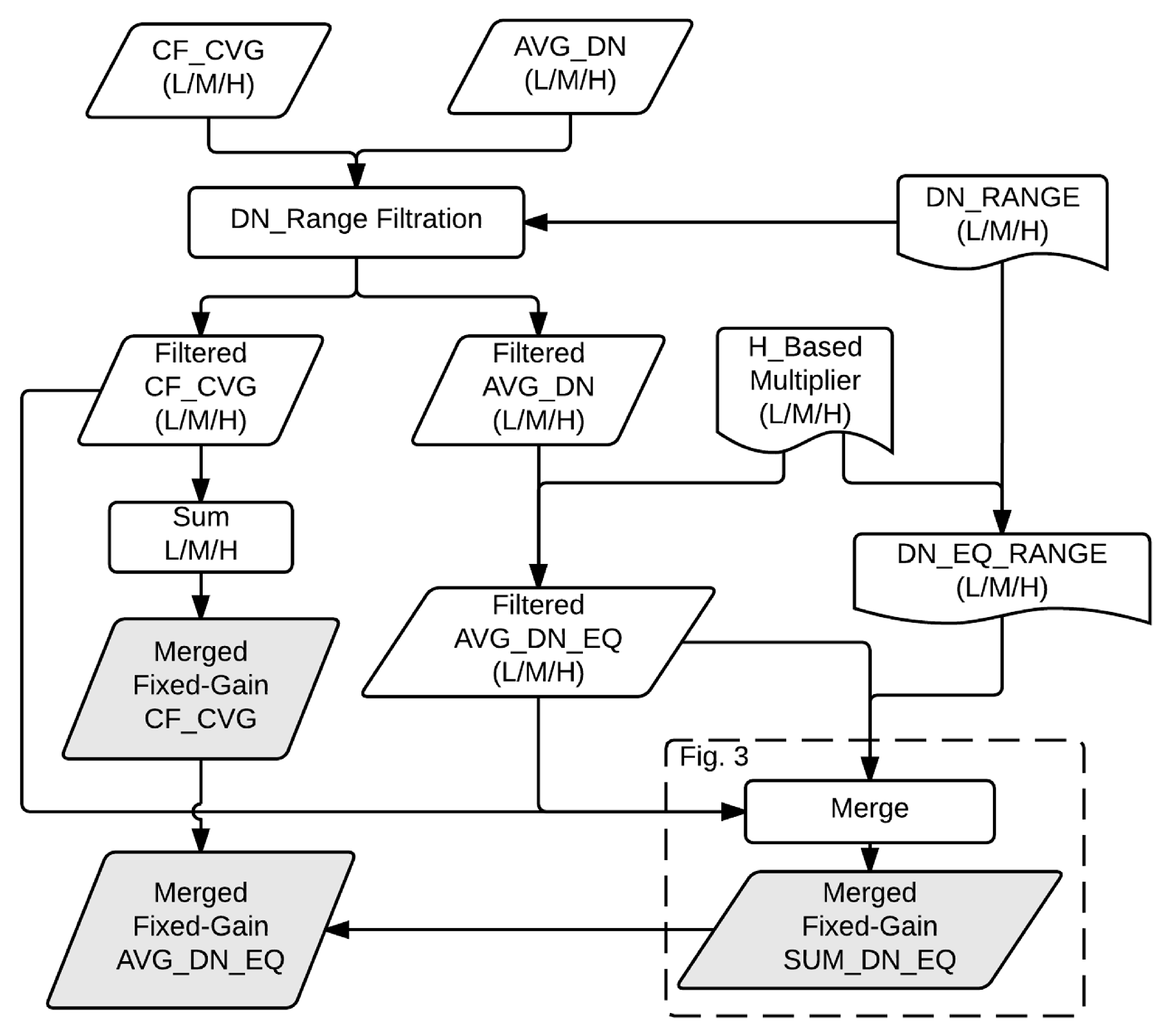
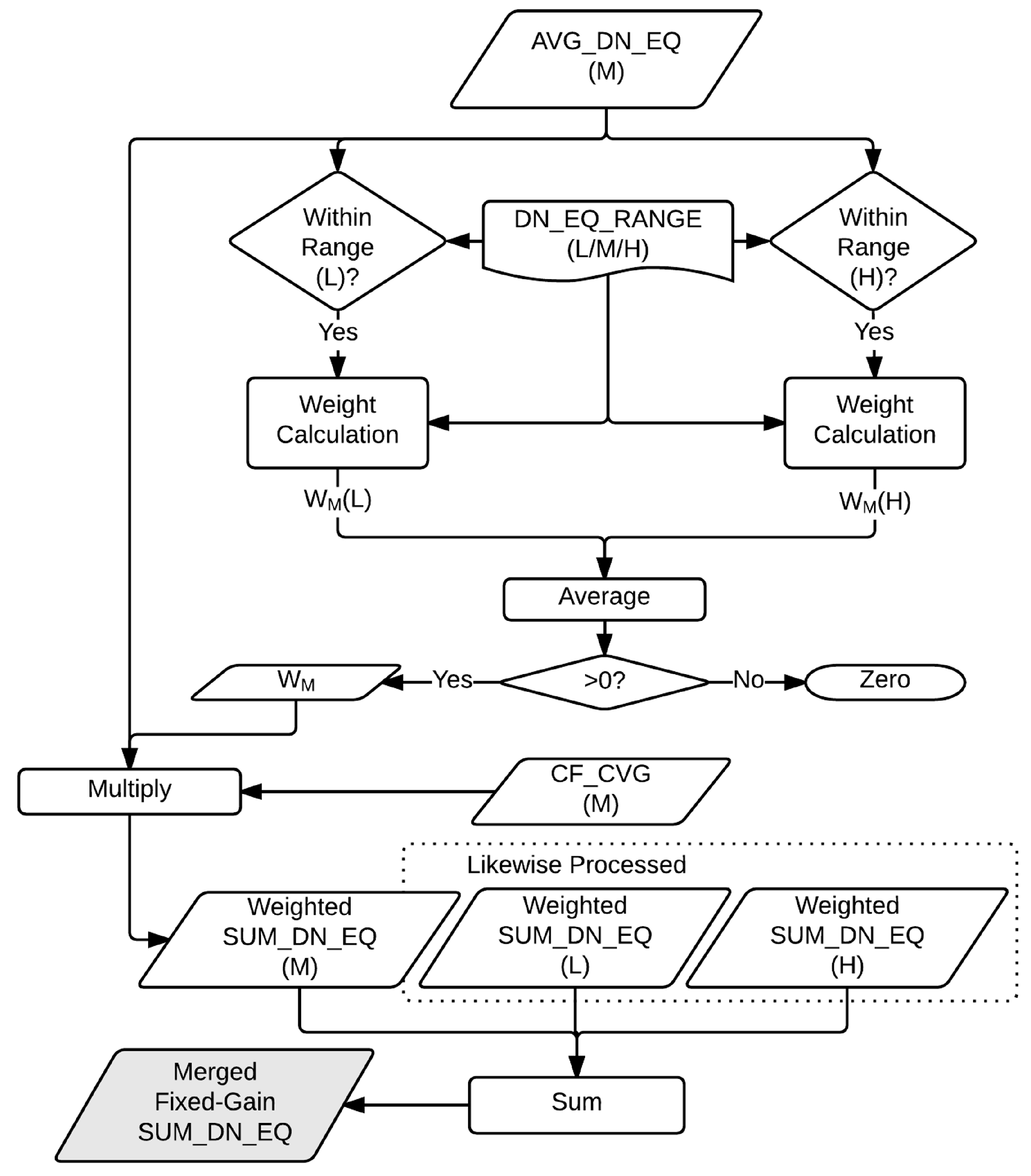
2.2.2. Merge Process

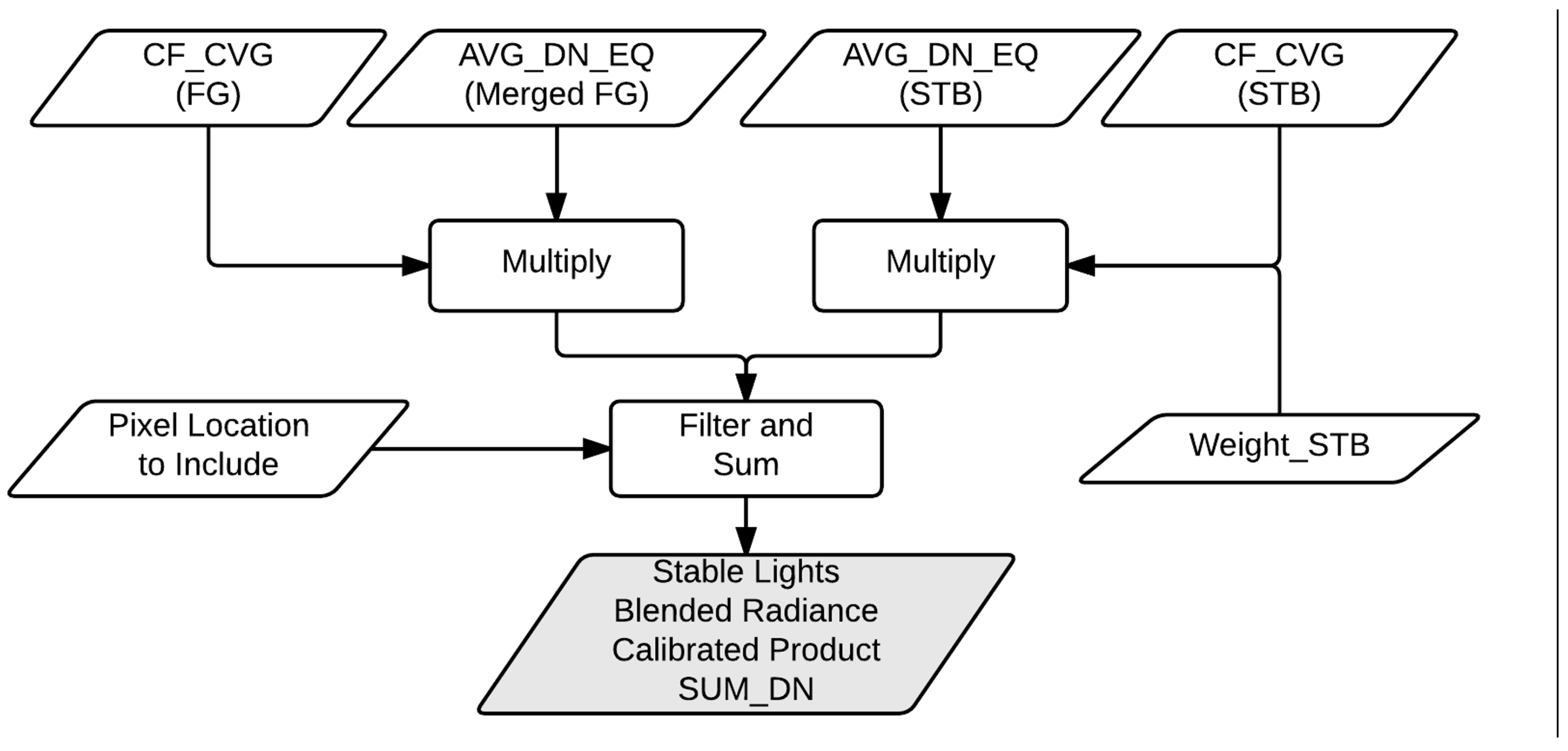
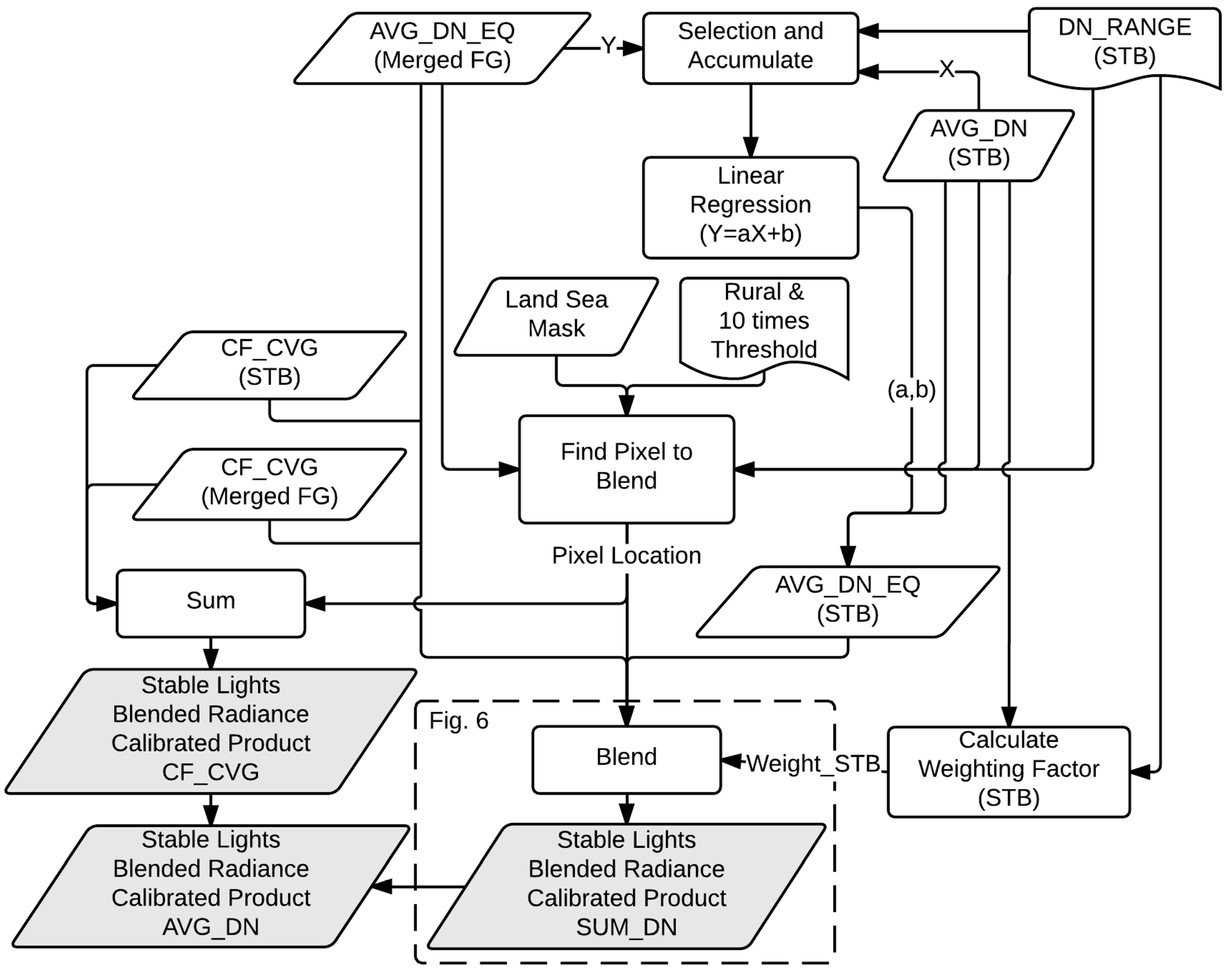
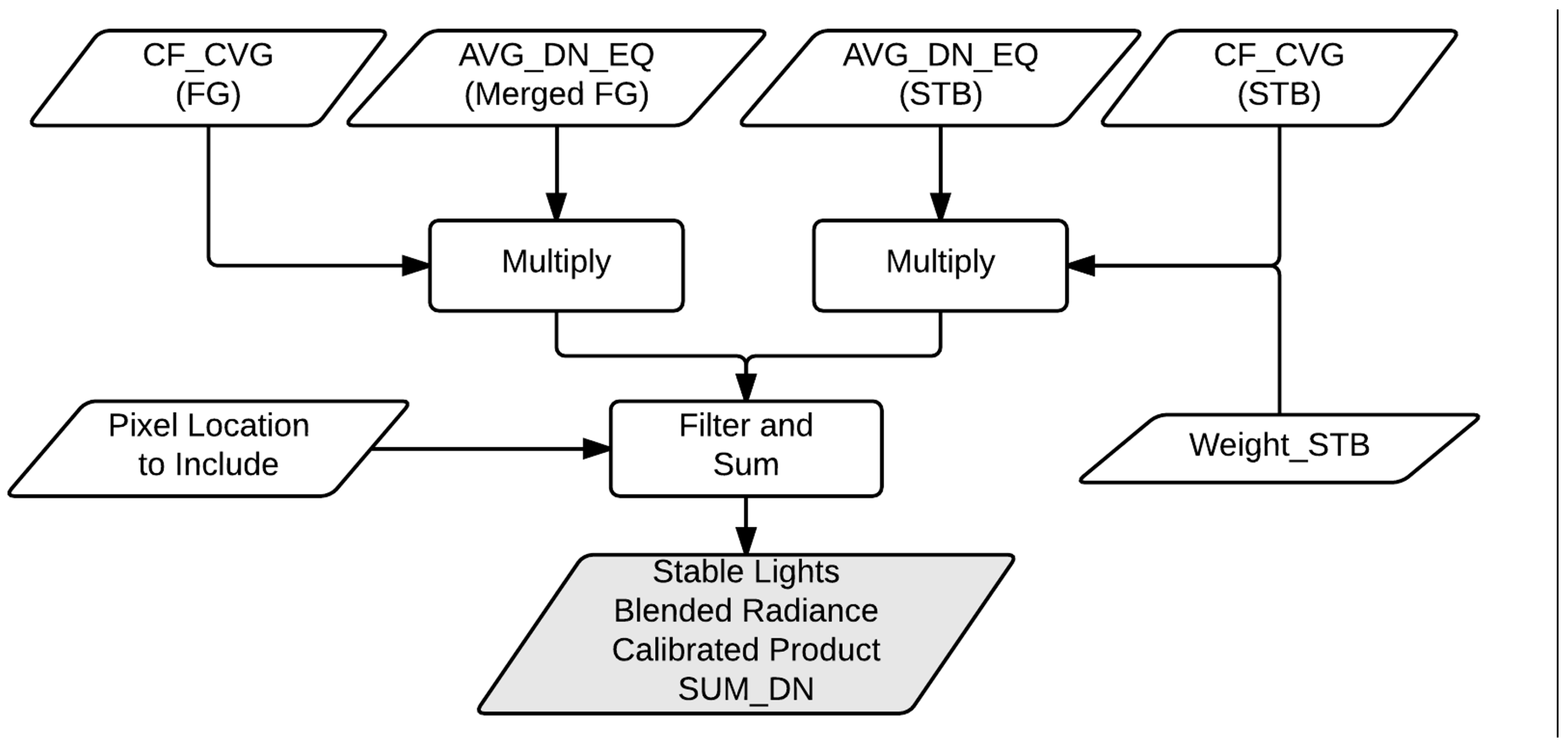
2.3. Blend Stable Lights Product
2.4. Intercalibration
2.4.1. Inter-Satellite Calibration
| Satellite | Base Gain (dB) | Multiplier | Radiance @ DN1 (W/cm2/sr) |
|---|---|---|---|
| F12 | 55 | 0.96 | 1.44E-10 |
| F14 | 55 | 0.82 | 1.23E-10 |
| F15 | 55 | 0.90 | 1.35E-10 |
| F16 | 55 | 1.00 | 1.50E-10 |
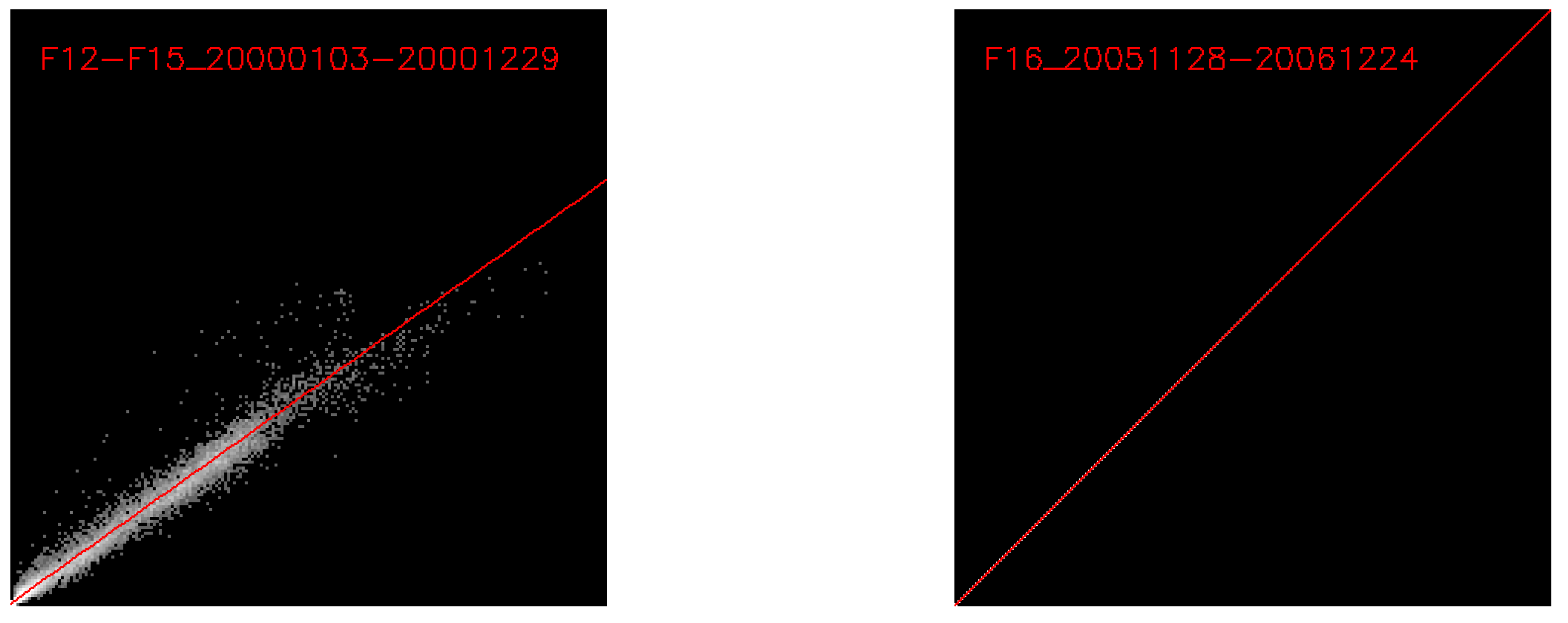
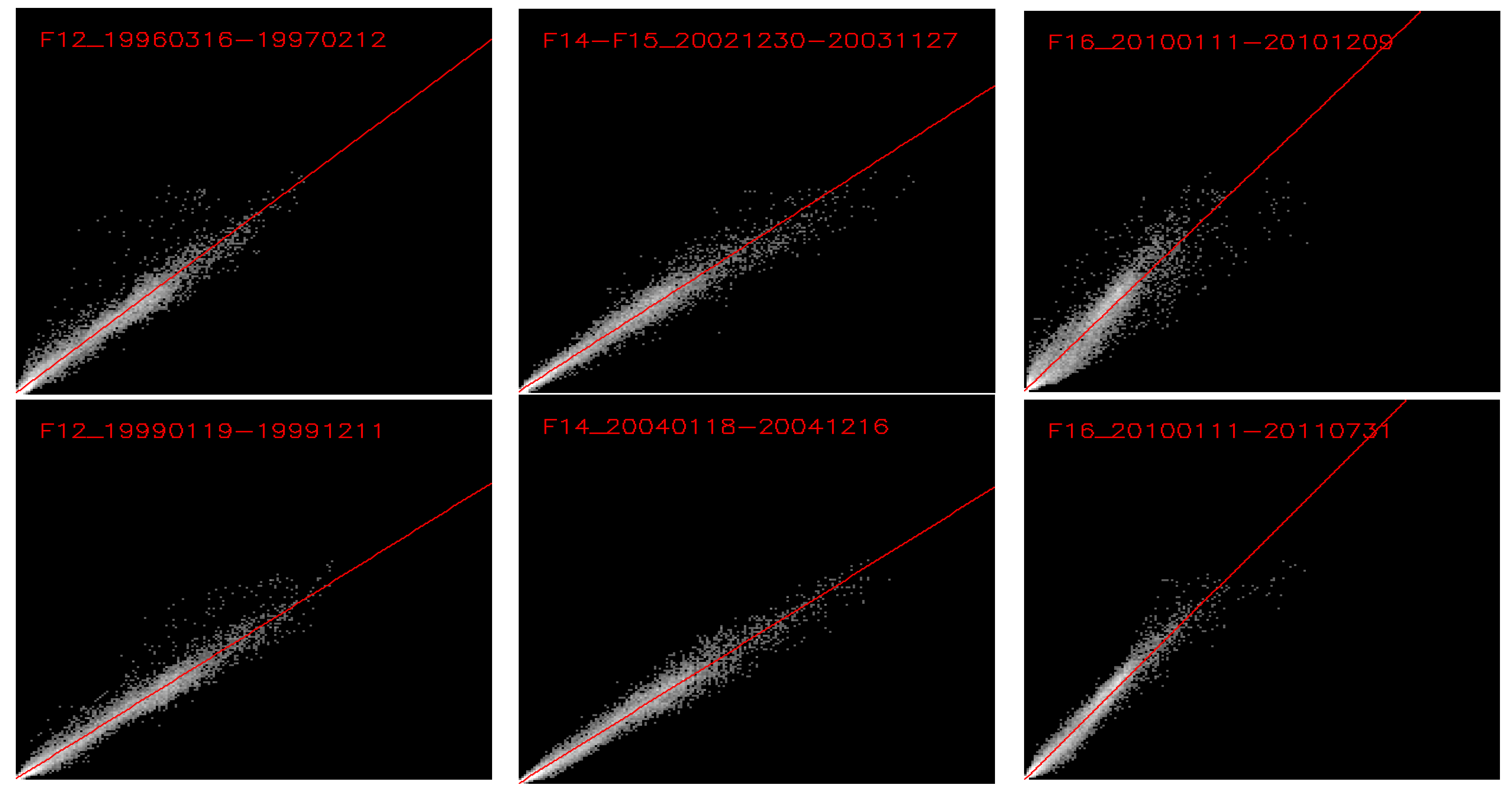
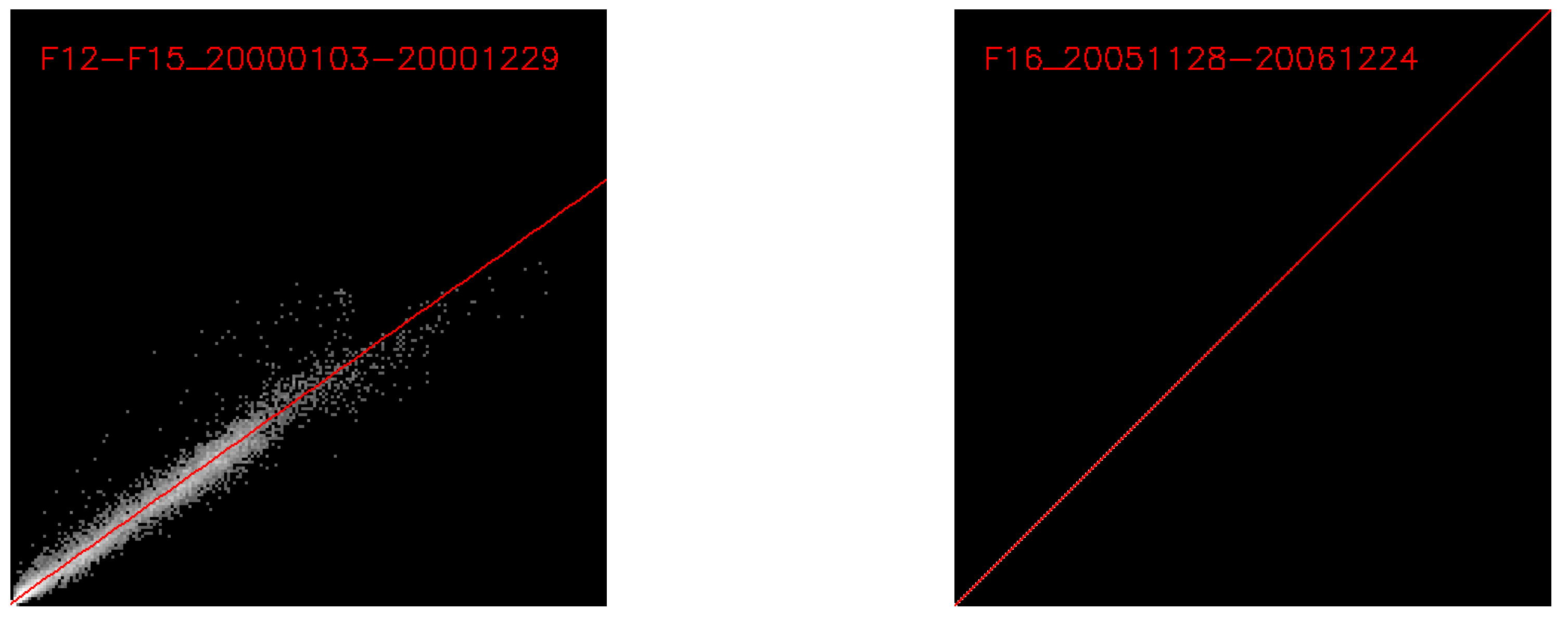
2.4.2. Inter-Annual Calibration
| Satellite_Year | Slope (a) | Intercept (b) | R2 | Number of Pixels * |
|---|---|---|---|---|
| F12_19960316–19970212 | 0.915 | 4.336 | 0.971 | 20,540 |
| F12_19990119–19991211 | 0.780 | 1.423 | 0.980 | 20,846 |
| F12-F15_20000103–20001229 | 0.710 | 3.658 | 0.980 | 20,866 |
| F14-F15_20021230–20031127 | 0.797 | 3.736 | 0.980 | 20,733 |
| F14_20040118–20041216 | 0.761 | 1.062 | 0.984 | 20,848 |
| F16_20051128–20061224 | 1.000 | 0.000 | 1.000 | 21,044 |
| F16_20100111–20101209 | 1.195 | 2.196 | 0.981 | 20,848 |
| F16_20100111–20110731 | 1.246 | −1.987 | 0.981 | 20,848 |
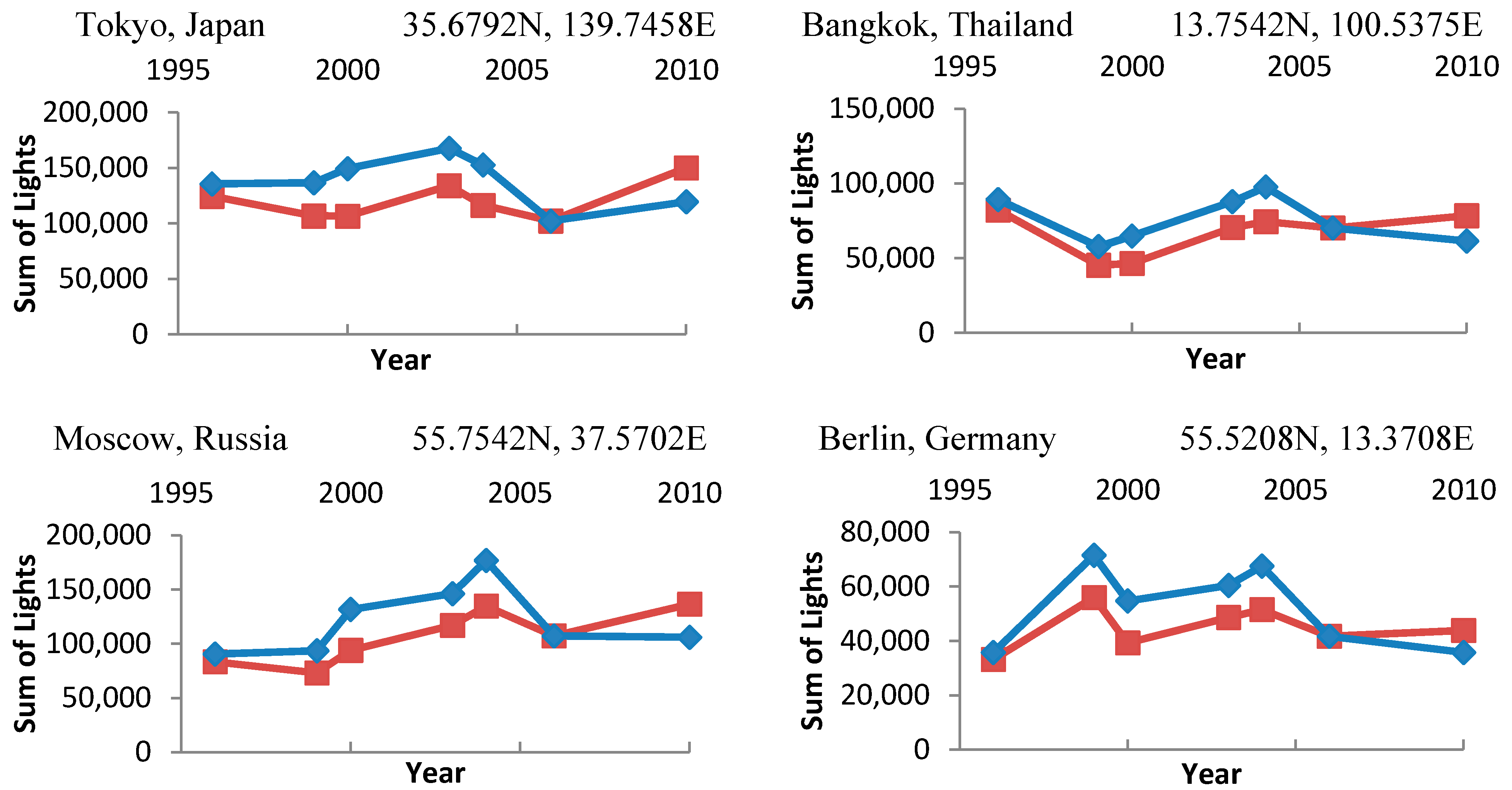
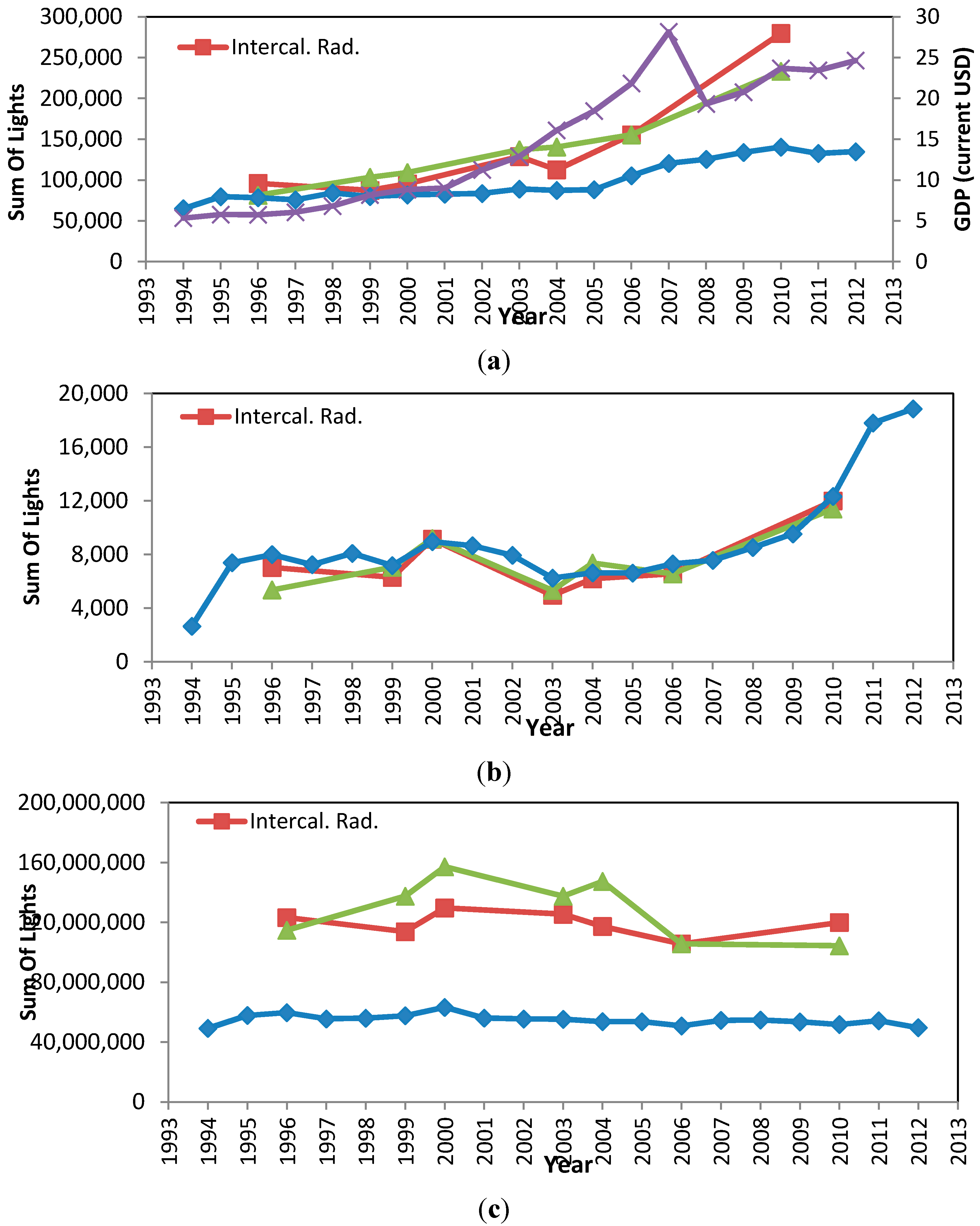
2.4.3. Verifying the Effect of Inter-Annual Calibration

3. Applications
3.1. Restriction on Converting DN to Radiance
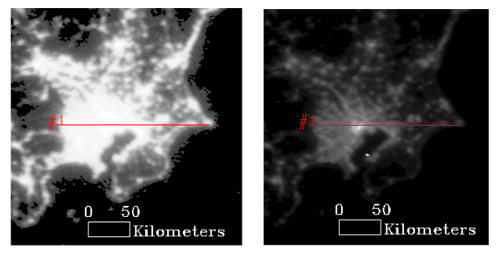
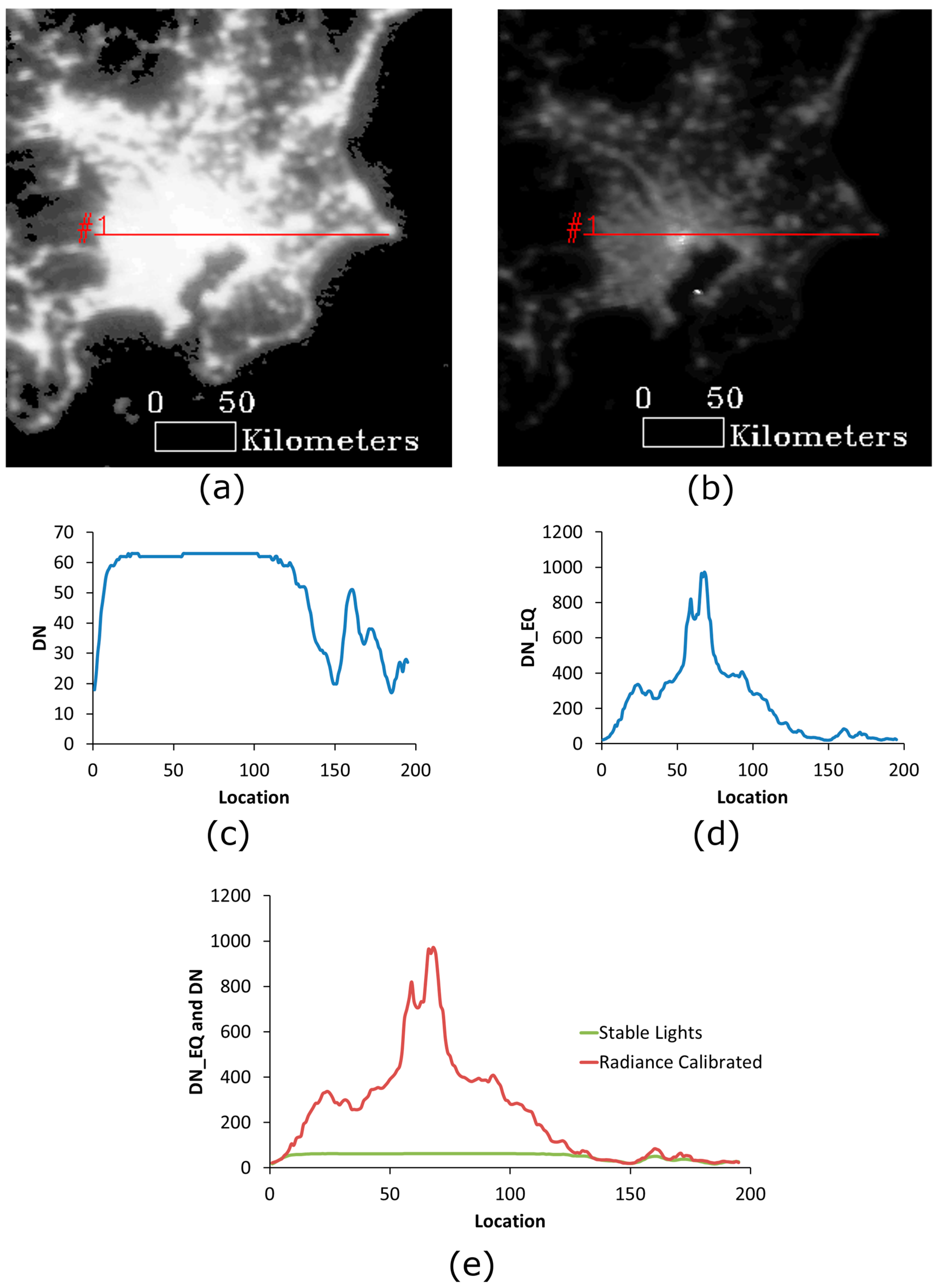
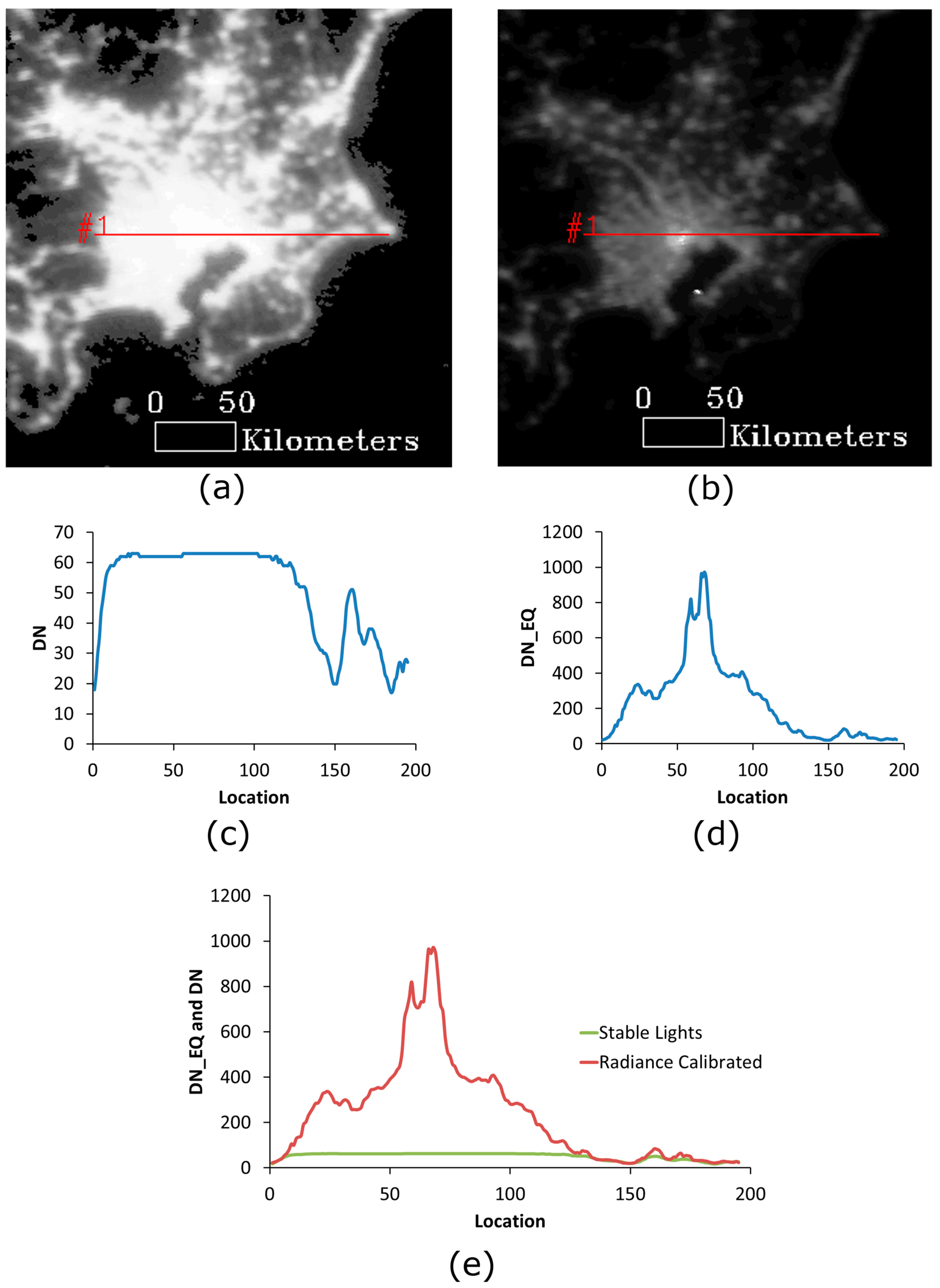
3.2. Comparing Radiance Calibrated Product with Stable Lights Product
4. Conclusion and Discussion
Acknowledgment
Author Contributions
Conflicts of Interest
References
- Doll, C.N.H. Population detection profiles of DMSP-OLS night-time imagery by regions of the world. In Proceedings of the 30th Asia-Pacific Advanced Network Meeting, Hanoi, Vietnam, 9–13 August 2010.
- Kiran Chand, T.R.; Badarinath, K.V.S.; Elvidge, C.D.; Tuttle, B.T. Spatial characterization of electrical power consumption patterns over India using temporal DMSP-OLS night-time satellite data. Int. J. Remote Sens. 2009, 30, 647–661. [Google Scholar]
- Zhao, N.; Currit, N.; Samson, E. Net primary production and gross domestic product in China derived from satellite imagery. Ecol. Econ. 2011, 70, 921–928. [Google Scholar] [CrossRef]
- Sutton, P.C.; Elvidge, C.D.; Chosh, T. Estimation of gross domestic product at sub-national scales using nighttime satellite imagery. Int. J. Ecol. Econ. Stat. 2007, 8, 5–21. [Google Scholar]
- Imhoff, M.L.; Lawrence, W.T.; Stutzer, D.C.; Elvidge, C.D. Disaggregation of national fossil fuel CO2 emissions using a global power plant database and DMSP nightlight data. In Proceedings of the 30th Asia-Pacific Advanced Network Meeting, Hanoi, Vietnam, 9–13 August 2010.
- Sutton, P.C.; Elvidge, C.D.; Tuttle, B.T.; Ziskin, D.; Baugh, K.; Ghosh, T. A 2010 mapping of the constructed surface area density for S.E. Aisa—Preliminary results. In Proceedings of the 30th Asia-Pacific Advanced Network Meeting, Hanoi, Vietnam, 9–13 August 2010.
- Elvidge, C.D.; Ziskin, D.; Baugh, K.E.; Tuttle, B.T.; Ghosh, T.; Pack, D.W.; Erwin, E.H.; Zhizhin, M. A fifteen year record of global natural gas flaring derived from satellite data. Energies 2009, 2, 595–622. [Google Scholar] [CrossRef]
- Oda, T.; Maksyutov, S.; Elvidge, C. A very high-resolution (1 km × 1 km) global fossil fuel CO2 emission inventory derived using a point source database and satellite observations of nighttime lights. Atmos. Chem. Phys. 2011, 11, 543–556. [Google Scholar]
- Feng-Chi, H.; Elvidge, C.D.; Matsuno, Y. Exploring and estimating in-use steel stocks in civil engineering and buildings from night-time lights. Int. J. Remote Sens. 2013, 34, 490–504. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Baugh, K.E.; Kihn, E.A.; Kroehl, H.W.; David, E.R. Mapping city lights with nighttime data from the DMSP operational linescan system. Photogramm. Eng. Remote Sens. 1997, 63, 777–734. [Google Scholar]
- Version 4 DMSP-OLS Nighttime Lights Time Series. Available online: http://www.ngdc.noaa.gov/eog/dmsp/downloadV4composites.html (accessed on 7 August 2014).
- Elvidge, C.D.; Baugh, K.E.; Dietz, J.B.; Bland, T.; Sutton, P.C.; Kroehl, H.W. Radiance calibration of DMSP-OLS low-light imaging data of human settlements. Remote Sens. Environ. 1999, 68, 77–88. [Google Scholar] [CrossRef]
- Ziskin, D.; Baugh, K.; Hsu, F.C.; Ghosh, T.; Elvidge, C. Methods used for the 2006 radiance lights. In Proceedings of the Asia-Pacific Advanced Network Meeting, Hanoi, Vietnam, 9–13 August 2010.
- Westinghouse Electric Corporation, Defense and Electronics Center. OLS Acceptance Test Report Volume I of IV Summary and Specification Requirements; Westinghouse Electric Corporation: Baltimore, MD, USA, 1991. [Google Scholar]
- Baugh, K.; Elvidge, C.; Ghosh, T.; Ziskin, D. Development of a 2009 stable lights product using DMSP-OLS data. In Proceedings of the Asia-Pacific Advanced Network Meeting, Hanoi, Vietnam, 9–13 August 2010.
- U.S. Energy Information Administration. Available online: http://www.eia.gov/countries/country-data.cfm?fips=td#pet (accessed on 12 August 2014).
- Central Bank of Trinidad and Tobago. Available online: http://www.central-bank.org.tt/content/output-annual-0 (accessed on 12 August 2014).
- The World Bank. Available online: http://data.worldbank.org/indicator/NY.GDP.MKTP.CD (accessed on 11 October 2014).
- Elvidge, C. Why VIIRS data is superior to DMSP for mapping nighttime lights. In Proceedings of the Asia-Pacific Advanced Network Meeting, Honolulu, HI, USA, 13–16 January 2013.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsu, F.-C.; Baugh, K.E.; Ghosh, T.; Zhizhin, M.; Elvidge, C.D. DMSP-OLS Radiance Calibrated Nighttime Lights Time Series with Intercalibration. Remote Sens. 2015, 7, 1855-1876. https://doi.org/10.3390/rs70201855
Hsu F-C, Baugh KE, Ghosh T, Zhizhin M, Elvidge CD. DMSP-OLS Radiance Calibrated Nighttime Lights Time Series with Intercalibration. Remote Sensing. 2015; 7(2):1855-1876. https://doi.org/10.3390/rs70201855
Chicago/Turabian StyleHsu, Feng-Chi, Kimberly E. Baugh, Tilottama Ghosh, Mikhail Zhizhin, and Christopher D. Elvidge. 2015. "DMSP-OLS Radiance Calibrated Nighttime Lights Time Series with Intercalibration" Remote Sensing 7, no. 2: 1855-1876. https://doi.org/10.3390/rs70201855
APA StyleHsu, F.-C., Baugh, K. E., Ghosh, T., Zhizhin, M., & Elvidge, C. D. (2015). DMSP-OLS Radiance Calibrated Nighttime Lights Time Series with Intercalibration. Remote Sensing, 7(2), 1855-1876. https://doi.org/10.3390/rs70201855